Планетарна зубчата передача з розподіленим навантаженням (варіанти)
Номер патенту: 26354
Опубліковано: 30.08.1999
Автори: Вірму Мішель Роже Шарль, ЛЬОФРАНК Бенедікт Анн-Марі, ЛІНЕ Юг Енрі Раймон
Формула / Реферат
1. Планетарная зубчатая передача с распределенной нагрузкой, содержащая центральное зубчатое колесо с геометрической осью вращения, зубчатое колесо с внутренним венцом и, по меньшей мере, один сателлит, установленный с возможностью сцепления одновременно с центральным зубчатым колесом и с зубчатым колесом с внутренним венцом, сателлиты смонтированы каждый с возможностью поворота вокруг оси на подшипнике на свободном конце гибкого вала с геометрической осью, другой конец вала выполнен за одно целое с водилом, отличающаяся тем, что зубчатые колеса и, по меньшей мере, один сателлит выполнены червячными, сателлиты установлены с возможностью поворота вокруг оси на подшипниках сферического типа, каждый сателлит выполнен в виде единого узла с внутренним кольцом подшипника, снабженного внешним кольцом с направлением вращения, перпендикулярном плоскости, определяемой геометрической осью вращения центрального зубчатого колеса и геометрической осью вращения гибкого вала, и направление скольжения внутреннего кольца совпадает с направлением геометрической оси вращения гибкого вала.
2. Планетарная зубчатая передача по п.1, отличающаяся тем, что подшипник смещен к водилу.
3. Планетарная зубчатая передача по п.1 или 2, отличающаяся тем, что внешнее кольцо подшипника имеет снаружи две поверхности, которые выполнены плоскими и параллельными друг другу.
4. Планетарная зубчатая передача по п.3, отличающаяся тем, что внешнее кольцо подшипника установлено с возможностью скольжения своими поверхностями между поверхностями направляющего элемента, выполненными плоскими, параллельными друг другу и параллельными геометрической оси вращения гибкого вала и перпендикулярными плоскости, определяемой геометрической осью вращения центрального зубчатого колеса и геометрической осью вращения гибкого вала.
5. Планетарная зубчатая передача с распределенной нагрузкой, содержащая центральное зубчатое колесо с геометрической осью вращения, зубчатое колесо с внутренним венцом и, по меньшей мере, один сателлит, установленный с возможностью сцепления одновременно с центральным зубчатым колесом и с зубчатым колесом с внутренним венцом, сателлиты смонтированы каждый с возможностью поворота вокруг оси на подшипнике на свободном конце гибкого вала с геометрической осью, другой конец вала выполнен за одно целое с водилом, отличающаяся тем, что зубчатые колеса и, по меньшей мере, один сателлит выполнены червячными, сателлиты установлены с возможностью поворота вокруг оси на подшипниках, внутреннее кольцо которых установлено с возможностью поворота на шаровом шарнире, который смонтирован на гибком валу, причем внутреннее кольцо выполнено в виде единого узла, по меньшей мере, с одним пальцем, конец которого установлен между стенками паза, неподвижного, по отношению к водилу, упомянутые стенки выполнены плоскими, параллельными друг другу и геометрической оси гибкого вала и перпендикулярны плоскости, определяемой геометрической осью вращения центрального зубчатого колеса и геометрической осью вращения гибкого вала.
6. Планетарная зубчатая передача по п.5, отличающаяся тем, что внутреннее кольцо подшипника выполнено в виде единого узла с двумя пальцами, которые расположены диаметрально противоположными относительно геометрической оси.
7. Планетарная зубчатая передача по п.5 или 6, отличающаяся тем, что пазы выполнены в заплечике вала.
Текст
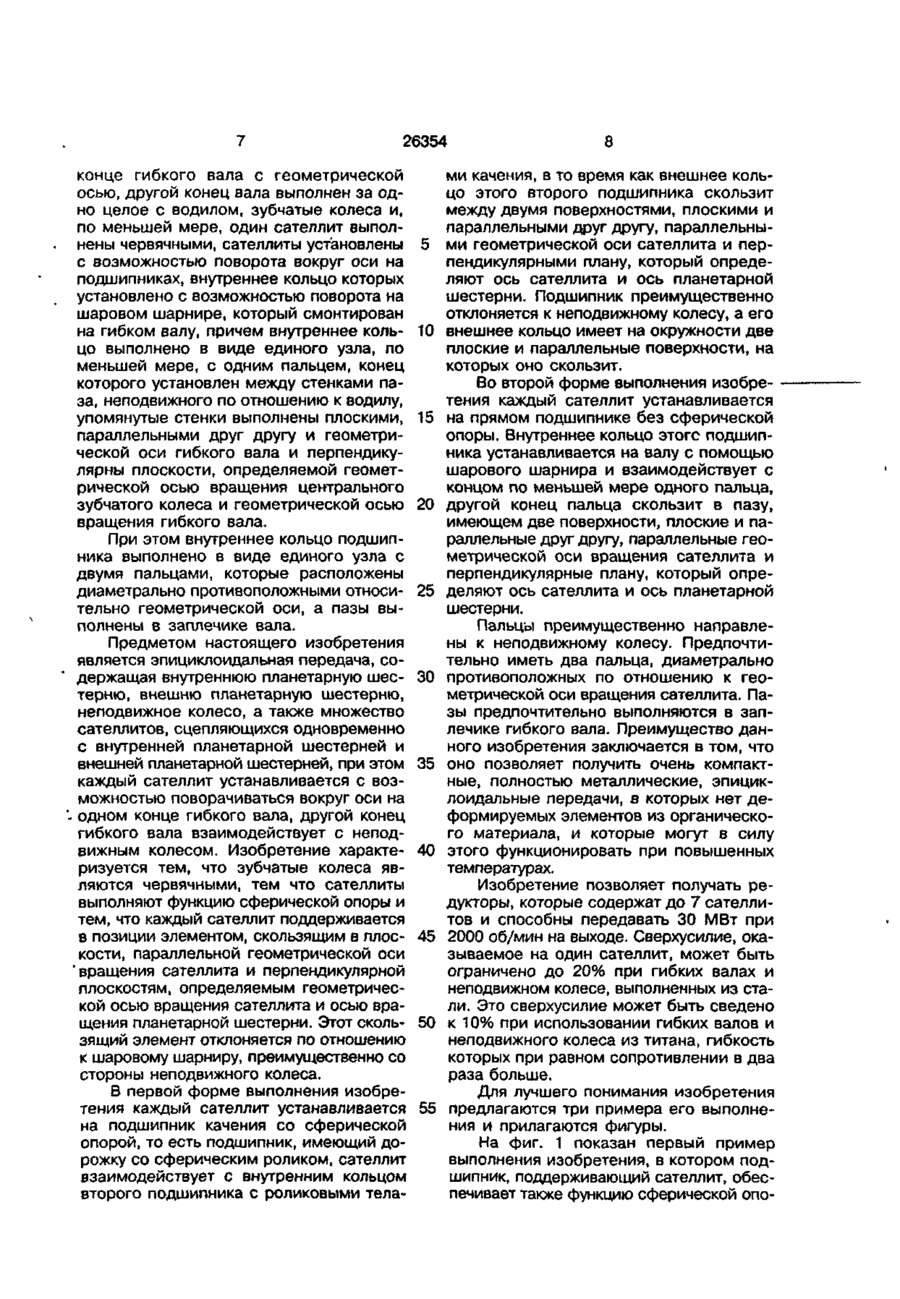
1. Планетарная зубчатая передача с распределенной нагрузкой, содержащая центральное зубчатое колесо с геометрической осью вращения, зубчатое колесо с внутренним венцом и, по меньшей мере, один сателлит, установленный с возможностью сцепления одновременно с центральным зубчатым колесом и с зубчатым колесом с внутренним венцом, сателлиты смонтированы каждый с возможностью поворота вокруг оси на подшипнике на свободном конце гибкого вала с геометрической осью, другой конец вала выполнен за одно целое с водил ом, о т л и ч а ю щ а я с я тем, что зубчатые колеса и, по меньшей мере, один сателлит выполнены червячными, сателлиты установлены с возможностью поворота вокруг оси на подшипниках сферического типа, каждый сателлит выполнен в виде единого узла с внутренним кольцом подшипника, снабженного внешним кольцом с направлением вращения, перпендикулярном плоскости, определяемой геометрической осью вращения центрального зубчатого колеса и геометрической осью вращения гибкого вала, и направление скольжения внутреннего кольца совпадает с направлением геометрической оси вращения гибкого вала. 2. Планетарная зубчатая передача по п. 1, о т л и ч а ю щ а я с я тем, что подшипник смещен к водилу. 3. Планетарная зубчатая передача по п. 1 или 2, о т л и ч а ю щ а я с я тем, что внешнее кольцо подшипника имеет снаружи-две поверхности, которые выполнены плоскими и параллельными друг другу. 4. Планетарная зубчатая передача по п. 3, о т л и ч а ю щ а я с я тем, что внешее кольцо подшипника установлено с возможностью скольжения своими поверхностями между поверхностями направляющего элемента, выполненными плоскими, параллельными друг другу и параллельными геометрической оси вращения гибкого вала и перпендикулярными плоскости, определяемой геометрической осью вращения центрального зубчатого колеса и геометрической осью вращения гибкого вала. 5. Планетарная зубчатая передача с распределенной нагрузкой, содержащая центральное зубчатое колесо с геометрической осью вращения, зубчатое колесо с внутренним венцом и, по меньшей мере, один сателлит, установленный с возможностью сцепления одновременно с центральным зубчатым колесом и с зубчатым колесом с внутренним венцом, сателлиты смонтированы каждый с возможностью поворота вокруг оси на подшипнике на свободном конце гибкого вала с геометрической осью, другой конец вала выполнен за одно целое с водилом, о т л и ч а ю щ а я с я тем, что зубчатые колеса и, по меньшей мере, один сателлит выполнены червячными, сателлиты установлены с возмож О 26354 ностью поворота вокруг оси на подшипниках, внутреннее кольцо которых установлено с возможностью поворота на шаровом шарнире, который смонтирован на гибком валу, причем внутреннее кольцо выполнено в виде единого узла, по меньшей мере, с одним пальцем, конец которого установлен между стенками паза, неподвижного по отношению к водилу, упомянутые стенки выполнены плоскими, параллельными друг другу и геометрической оси гибкого вала и перпендикулярны плоскости, определяемой геометрической осью вращения центрального зубчатого колеса и геометрической осью вращения гибкого вала. 6. Планетарная зубчатая передача по п. 5, о т л и ч а ю щ а я с я тем, что внутреннее кольцо подшипника выполнено в виде единого узла с двумя пальцами, которые расположены диаметрально противоположными относительно геометрической оси. 7. Планетарная зубчатая передача по п. 5 или 6, о т л и ч а ю щ а я с я тем, что пазы выполнены в заплечике вала. Изобретение относится к планетарным зубчатым передачам, называемым также эпициклоидальными передачами, и, в частности, к передачам этого типа, которые могут содержать увеличенное число сателлитов, такие зубчатые передачи позволяют передавать значительную мощность при уменьшенной массе и уменьшенных габаритах, что делает их удобными для применения, в частности, их удобно применять в аэронавтике, но не исключительно. Планетарные зубчатые передачи являются хорошо известными устройствами для передачи крутящего момента, большой мощности и для увеличения или разделения скоростного вращения. В своей простейшей форме передача этого типа содержит центральное зубчатое колесо, называемое внутренней планетарной шестерней, внешнее зубчатое колесо, называемое внешней планетарной шестерней, а также одно или несколько промежуточных зубчатых колес или сателлитов, сцепляющихся одновременно с внутренней планетарной шестерней и с внешней планетарной шестерней. Сателлиты монтируются поворачивающимися вокруг оси на валах, которые поддерживаются неподвижным колесом. Один из трех элементов этой шестерни, а именно внутренняя планетарная шестерня, внешняя планетарная шестерня или неподвижное колесо, закрепляется, в то время как два других вращаются. Один из двух вращающихся элементов действует в начале движения, а другой - в конце. Для передачи одной и той же мощности увеличение числа сателлитов и использование высокопрочных металлов поз воляет уменьшить размер зубчатых колес, и, соответственно, уменьшить и сделать более легкой эпициклоидальную передачу. Но при этом мощность, заключенная в передаче, удаляется труднее, а температура функционирования этой передачи намного выше. При таких габаритах и такой температуре функционирования хорошее распределение передаваемой нагрузки на все сателлиты достигается преимущественно установкой этих сателлитов на гибкие металлические валы. Эти валы жестко крепятся одним концом на неподвижном колесе, в то время как другой конец этих валов остается свободным и поддерживает сателлиты с помощью устройства, поворачивающегося вокруг оси и выполняющего функцию сферической опоры. Это устройство может иметь подшипник качения со сферической опорой, который обеспечивает одновременно эти две функции, то есть одна из его дорожек является сферической. И наоборот, это устройство может иметь подшипник качения, который не имеет сферической опоры, а соединен с отдельным шаровым шарниром. Если передача использует прямозубую шестерню или шевронное зубчатое колесо, то такого устройства, поворачивающегося вокруг оси и имеющего эффект сферической опоры, будет достаточно, так как каждый сателлит автоматически направляет свою ось вращения на планетарную внутреннюю шестерню и планетарную внешнюю шестерню. Однако, недостаток прямозубой шестерни состоит в том, что она провоцирует вибрацию в передаче вращательного движения, а недостаток шевронного зубчатого колеса состоит в 5 10 15 20 25 30 35 40 26354 том, что оно является дорогостоящим и требует большой точности исполнения, чтобы передаваемое усилие хорошо распределялось на зубьях. Червячные колеса не имеют таких недостатков. Они являются недорогими по сравнению с шевронными зубчатыми колесами и позволяют иметь передачу без вибраций и с равномерным распределением усилия вдоль зубьев. Однако, в червячных колесах образуются осевые паразитные силы, которые действуют и на зубья и создают крутящий момент, имеющий тенденцию опрокидывать зубчатое колесо в плоскость, определяемую осями этого зубчатого колеса. Если сателлиты имеют сферическую опору, они будут поддерживаться только при опоре своими зубьями на зубья внутренней и внешней планетарных шестерен, а это будет вызывать преждевременный износ зубьев Известна планетарная зубчатая передача с распределенной нагрузкой, содержащая центральное зубчатое колесо с геометрической осью вращения, зубчатое колесо с внутренним венцом, и, по меньшей мере, один сателлит, установленный с возможностью сцепления одновременно с центральным зубчатым колесом и с зубчатым колесом с внутренним венцом, сателлиты смонтированы каждый с возможностью поворога вокруг оси на подшипнике на свободном конце гибкого вала с геометрической осью, другой конец вала выполнен за одно целое с водилом Недостаток известной передачи заключается в том, что ее элементы подвержены повышенному износу из-за возникающего при ее функционировании реактивного крутящего момента. Кроме того, устройство не обеспечивает равномерного распределения усилия нагрузки. В основу изобретения поставлена задача повышения износостойкости и эффективности работы планетарной зубчатой передачи с распределенной нагрузкой путем выполнения зубчатых колес и сателлитов червячными, установления оптимальной формы взаимосвязи сателлитов с элементами подшипников и выбора оптимальной конструкции последних, что позволяет компенсировать осевые паразитные силы, создающие опрокидывающий реактивный крутящий момент, действующий на сателлиты передачи, а также обеспечивает равномерность распределения передаточного усилия на сателлиты. 5 10 15 20 25 30 35 40 45 50 55 Поставленная задача достигается за счет того, что в планетарной зубчатой передаче с распределенной нагрузкой, содержащей центральное зубчатое колесо с геометрической осью вращения, зубчатое колесо с внутренним венцом, и, по меньшей мере, один сателлит, установленный с возможностью сцепления одновременно с центральным зубчатым колесом и с зубчатым колесом с внутренним венцом, сателлиты смонтированы каждый с возможностью поворота вокруг оси на подшипнике на свободном конце гибкого вала с геометрической осью, другой конец вала выполнен за одно целое с водилом, согласно изобретения, зубчатые колеса, и, по меньшей мере, один сателлит выполнены червячными, сателлиты установлены с возможностью поворота вокруг оси на подшипниках сферического типа, каждый сателлит выполнен в виде единого узла с внутренним кольцом подшипника, снабженного внешним кольцом с направлением вращения, перпендикулярном плоскости, определяемой геометрической осью вращения центрального зубчатого колеса и геометрической осью вращения гибкого вала, и внутренним кольцом с направлением скольжения, совпадающем с направлением геометрической оси вращения гибкого вала. При этом подшипник смещен к водилу, внешнее кольцо подшипника имеет снаружи две поверхности, которые выполнены плоскими и параллельными друг другу, причем внешнее кольцо подшипни ка установлено с возможностью скольжения своими поверхностями между поверхностями направляющего элемента, выполненными плоскими, параллельными друг другу и параллельными геометрической оси вращения гибкого вала и перпендикулярными плоскости, определяемой геометрической осью вращения центрального зубчатого колеса и геометрической осью вращения гибкого вала. Согласно второму варианту выполнения изобретения поставленная задача достигается за счет того, что в планетарной зубчатой передаче с распределенной нагрузкой, содержащей центральное зубчатое колесо с геометрической осью вращения, зубчатое колесо с внутренним венцом и, по меньшей мере, один сателлит, установленный с возможностью сцепления одновременно с центральным зубчатым колесом и с зубчатым колесом с внутренним венцом, сателлиты смонтированы каждый с возможностью поворота вокруг оси на подшипнике на свободном 26354 конце гибкого вала с геометрической осью, другой конец вала выполнен за одно целое с водилом, зубчатые колеса и, по меньшей мере, один сателлит выполнены червячными, сателлиты установлены с возможностью поворота вокруг оси на подшипниках, внутреннее кольцо которых установлено с возможностью поворота на шаровом шарнире, который смонтирован на гибком валу, причем внутреннее кольцо выполнено в виде единого узла, по меньшей мере, с одним пальцем, конец которого установлен между стенками паза, неподвижного по отношению к водилу, упомянутые стенки выполнены плоскими, параллельными друг другу и геометрической оси гибкого вала и перпендикулярны плоскости, определяемой геометрической осью вращения центрального зубчатого колеса и геометрической осью вращения гибкого вала. При этом внутреннее кольцо подшипника выполнено в виде единого узла с двумя пальцами, которые расположены диаметрально противоположными относительно геометрической оси, а пазы выполнены в заплечике вала. Предметом настоящего изобретения является эпициклоидальная передача, содержащая внутреннюю планетарную шестерню, внешню планетарную шестерню, неподвижное колесо, а также множество сателлитов, сцепляющихся одновременно с внутренней планетарной шестерней и внешней планетарной шестерней, при этом каждый сателлит устанавливается с возможностью поворачиваться вокруг оси на одном конце гибкого вала, другой конец гибкого вала взаимодействует с неподвижным колесом. Изобретение характеризуется тем, что зубчатые колеса являются червячными, тем что сателлиты выполняют функцию сферической опоры и тем, что каждый сателлит поддерживается в позиции элементом, скользящим в плоскости, параллельной геометрической оси 'вращения сателлита и перпендикулярной плоскостям, определяемым геометрической осью вращения сателлита и осью вращения планетарной шестерни. Этот скользящий элемент отклоняется по отношению к шаровому шарниру, преимущественно со стороны неподвижного колеса. В первой форме выполнения изобретения каждый сателлит устанавливается на подшипник качения со сферической опорой, то есть подшипник, имеющий дорожку со сферическим роликом, сателлит взаимодействует с внутренним кольцом второго подшипника с роликовыми тела 5 10 15 20 25 30 35 40 45 50 55 8 ми качения, в то время как внешнее кольцо этого второго подшипника скользит между двумя поверхностями, плоскими и параллельными друг другу, параллельными геометрической оси сателлита и перпендикулярными плану, который определяют ось сателлита и ось планетарной шестерни. Подшипник преимущественно отклоняется к неподвижному колесу, а его внешнее кольцо имеет на окружности две плоские и параллельные поверхности, на которых оно скользит. Во второй форме выполнения изобретения каждый сателлит устанавливается на прямом подшипнике без сферической опоры. Внутреннее кольцо этогс подшипника устанавливается на валу с помощью шарового шарнира и взаимодействует с концом по меньшей мере одного пальца, другой конец пальца скользит в пазу, имеющем две поверхности, плоские и параллельные друг другу, параллельные геометрической оси вращения сателлита и перпендикулярные плану, который определяют ось сателлита и ось планетарной шестерни. Пальцы преимущественно направлены к неподвижному колесу. Предпочтительно иметь два пальца, диаметрально противоположных по отношению к геометрической оси вращения сателлита. Пазы предпочтительно выполняются в заплечике гибкого вала. Преимущество данного изобретения заключается в том, что оно позволяет получить очень компактные, полностью металлические, эпициклоидальные передачи, в которых нет деформируемых элементов из органического материала, и которые могут в силу этого функционировать при повышенных температурах. Изобретение позволяет получать редукторы, которые содержат до 7 сателлитов и способны передавать 30 МВт при 2000 об/мин на выходе. Сверхусилие, оказываемое на один сателлит, может быть ограничено до 20% при гибких валах и неподвижном колесе, выполненных из стали. Это сверхусилие может быть сведено к 10% при использовании гибких валов и неподвижного колеса из титана, гибкость которых при равном сопротивлении в два раза больше. Для лучшего понимания изобретения предлагаются три примера его выполнения и прилагаются фигуры. На фиг. 1 показан первый пример выполнения изобретения, в котором подшипник, поддерживающий сателлит, обеспечивает также функцию сферической опо 26354 ры; на фиг. 2 - разрез по А второго подшипника, поддерживающего сателлит в позиции; на фиг. 3 - второй пример выполнения изобретения, в котором сферическая опора является элементом, отдельным от подшипника, поддерживающего сателлит. Передача включает в себя центральное зубчатое колесо 1, называемое также центральной планетарной шестерней, геометрическую ось 2, неподвижное колесо 3, центрированное на геометрической оси 2, одно или несколько зубчатых колес 4, называемых сателлитами, названные сателлиты 4 поворачиваются каждый вокруг своей оси на валу 5 с геометрической осью 6, этот вал 5 взаимодействует с неподвижным колесом 3, а также включает в себя зубчатое колесо с внутренним венцом 7, которое окружает сателлиты 4 и называется поэтому внешней планетарной шестерней. Ось 6 является геометрической осью вращения сателлита 4. Сателлиты 4 сцепляются с внутренней планетарной шестерней 4 и с внешней планетарной шестерней 7. Когда в редукторе используется эпициклическая передача, движение вводится центральной планетарной шестерней 1. Согласно выбранному коэффициенту редукции, колесо 3 или внешняя планетарная шестерня 7 являются неподвижными, и движение возобновляется на том из этих двух элементов, который является подвижным. Каждый сателлит 4 поворачивается вокруг оси на валу 5 с помощью подшипника 8. В этом примере подшипник 8 - это подшипник качения со сферической поверхностью. Этот тип подшипника с роликовыми элементами качения хорошо известен. В этом примере внешнее кольцо подшипника 8 совмещается с сателлитом 4. Оно имеет внешнюю роликовую дорожку 9 сферическую в опоре на роликовые элементы 10, которые в этом примере имеют форму бочонков. Роликовые элементы 10 сами опираются на роликовые дорожки 11, выполненные на внутреннем кольце 12 подшипника 8. Роликовые элементы 10 поддерживаются на расстоянии друг от друга сепараторами 13. Подшипник 8 имеет преимущественно два ряда роликовых элементов. Внутреннее кольцо 12 располагается на валу 5, в упоре и на заплечике 14, выполненном на валу 5, названное внутреннее кольцо 12 теперь упирается на заплечик 14 с помощью гайки 15, которую закрепляют тормозной шайбой 16. 5 10 15 20 25 30 35 10 Вал 5 взаимодействует концом 17 с неподвижным колесом 3, в то время как другой его конец 18 остается свободным, при этом сателлит 4 и его подшипник 8 располагаются на свободном конце 18. Вал 5 содержит между взаимодействующим концом 17 и свободным концом 18 деформируемую зону 19, которая придает ему гибкость. Эта деформируемая зона 19 имеет преимущественно трубчатую форму с тонкой стенкой 20. В предпочтительном методе выполнения вал 5 имеет на своем конце 17, взаимодействующем с неподвижным колесом 3, цилиндрическую рабочую поверхность 21, которая проникает с уменьшенным или отрицательным зазором в расточное отверстие неподвижного колеса 3. Рабочая цилиндрическая поверхность 21 примыкает к заплечику 22, расположенному со стороны сателлита 4. Заплечик 22 упирается на внутреннюю поверхность 23 неподвижного колеса 3. Вал 5 блокируется на неподвижном колесе 3 гайкой 24 и стопорной шайбой 25, противоположными заплечику 22. Благодаря гибкости вала 5, каждый сателлит 4 может опираться одновременно на зубья центральной планетарной шестерни 1 и зубья внешней планетарной шестерни 7, что приводит к отличному распределению передаточного усилия на все сателлиты. Изгиб вала 5 производит угловое смещение его свободного конца 18, поддерживающего подшипник 8, но сцепление сателлита 4 с планетарными шестернями 1 и 7 поддерживает этот спутник в позиции, благодаря сферической опоре, обеспеченной в этом примере подшипником 8. Максимальное сверхусилие, наклады40 ваемое на сателлит, равно отклонению, которое нужно восполнить, поделенному на гибкость вала 5. Это восполняемое отклонение само зависит от допусков производства. Это сверхусилие может 45 быть снижено приданием большей гибкости валу 5, либо увеличением длины стенки 20 или уменьшением ее диаметра или ее толщины. Придание большей гибкости валу 5 также уменьшает его проч50 ность. Чтобы не слишком ослаблять этот вал 5, иногда необходимо выбрать материал, имеющий на равном расстоянии модуль эластичности более слабый, чем модуль эластичности первоначально выбран55 ного материала. Например, заменяя сталь сплавом титана, таким как ТА 6V, который имеет модуль эластичности в два раза слабее, можно удвоить гибкость вала, не уменьшая его прочности. Поскольку зубчатые колеса являются червячными, са 11 26354 теллит 4 в точке 26 сцепления с центральной планетарной шестерней 1 и в точке 27 сцепления с внешней планетарной шестерней 7 подвергается соответственно силам реакции 28 и 29, которые параллельны геометрической оси вращения 6 и направлены в противоположные стороны. Эти силы реакции 28 и 29 производят таким образом так называемый реактивный крутящий момент, который имеет тенденцию опрокидывать сателлит 4 в план, который определяется геометрическими осями 2 и 6. Подшипник с роликовыми телами 8 сателлита 4 со сферической опорой не может противодействовать этому крутящему моменту. Сателлиты 4 соответственно соединяются каждый с устройством 30, компенсирующим реактивный крутящий момент, названные устройства 30 не дают названным сателлитам 4 опрокидываться под воздействием этого крутящего момента. Компенсирующее устройство 30 содержит подшипник 31, центрированный на оси 6 и отклоненный к неподвижному колесу 3 относительно сателлита 4. Этот подшипник 31 содержит первое кольцо, взаимодействующее с сателлитом 4, и второе кольцо, взаимодействующее с неподвижным колесом 3, но остающееся по отношению к нему свободным, двигаясь в направлении, перпендикулярном плану, определенному геометрическими осями вращения 2 и 6. В предпочтительном методе выполнения, подшипник 31 содержит два цилиндрических ролика 32. Внутреннее кольцо 33 названного подшипника взаимодействует с сателлитом 4 через перемычку 34, которая имеет цилиндрическую форму или форму усеченного конуса. Внешнее кольцо 35 подшипника 31 имеет на своей окружности две поверхности 36 и 37, плоские, параллельные друг другу и перпендикулярные плану, который определен осями 2 и 6. Внешнее кольцо 35 скользит своими поверхностями 36 и 37 в направлении, перпендикулярном плану, который определен осями 2 и 6 между поверхностями 38 и 39 направляющего элемента 40. Названные поверхности 38 и 39 являются плоскими, параллельными друг другу, параллельными оси 6 и перпендикулярными плану, который определен осями 2 и 6. Понятно, что скольжение, позволяющее поддерживать сателлит 4 в.позиции, является результатом двух элементарных скольжений: первое осуществляется поверхностями 36, 37 и 38, 39 в направле 5 10 15 20 25 30 35 40 45 50 55 12 нии, перпендикулярном плану, определенному геометрическими осями 2 и 6, в то время как второе осуществляется внутренним кольцом 33 и роликами 32 в направлении оси 6, совокупность этих двух скольжений эквивалентна скольжению в плане, параллельном оси 6, и перпендикулярном плану, определенному осями 2 и 6. Направляющий элемент 40 имеет ширину, немного превосходящую ширину внешнего кольца 35, названный направляющий элемент 40 и названное кольцо 35 зажимаются каждый с двух сторон двумя пластинами 41 и 42, радиальными к геометрической оси вращения 6, Эти пластины 41 и 42 частично покрывают боковые поверхности кольца 35 и таким образом, направляют это кольцо 35 перпендикулярно плану, определенному осями 2 и 6. В предпочтительном методе выполнения направляющий элемент 40 и пластины 41 и 42 радиально разграничены между цилиндрической поверхностью 43. Неподвижное колесо 3 имеет отверстие, открытое со стороны сателлита 4, названное отверстие радиально разграничено наружу цилиндрической стенкой 44, диаметр которой немного больше диаметра поверхности 43, названное отверстие также разграничено в боковом направлении плоской стенкой 45, радиальной к оси 6. В этом отверстии последовательно располагаются напротив поверхности 45 пластина 41, направляющий элемент 40 с внешним кольцом 35, роликовые элементы 32 и пластина 42. Узел поддерживается напротив поверхности 45 винтами 46, которые проходят последовательно через пластину 42, направляющий элемент 40, пластину 41 и которые привинчиваются к неподвижному колесу 3 через поверхность 45. Теперь рассмотрим фигуру 2, которая представляет собой разрез по А-А устройства 30, компенсирующего крутящий момент. Направляющий элемент 40 располагается в расточном отверстии колеса 3 и центрируется на оси 6 своей внешней поверхностью 43 в контакте с цилиндрической стенкой 44 названного отверстия. Направляющий элемент 40 содержит внутренний паз 47, в котором располагается внешнее кольцо 35 подшипника 31. Это кольцо 35 перемещается внутри паза 47 в направлении 48, перпендикулярном плану, который определяется геометрическими осями вращения 2 и 6. Кольцо 35 скользит своими поверхностями 36 и 37 между поверхностями 38 и 39 направляю 13 26354 щего элемента 40. В направляющем элементе 40 могут быть выполнены дополнительные пазы 49, чтобы сделать этот элемент более легким. Теперь рассмотрим фигуру 3, которая показывает второй пример выполнения изобретения. Прежде всего изложим общие пункты с предыдущим примером выполнения. Передача имеет центральную планетарную шестерню 1 и внешнюю планетарную шестерню 7, обе имеют геометрическую ось вращения 2. По меньшей мере один сателлит 4 сцепляется одновременно с центральной планетарной шестерней 1 и внешней планетарной шестерней 7. Каждый сателлит 4 поворачивается вокруг оси на свободном конце 18 вала 5 с помощью подшипника 8, этот вал 5 взаимодействует своим другим концом 17 с неподвижным колесом 3. Вал 5 имеет геометрическую ось 6, которая также является геометрической осью вращения сателлита 4. в предпочтительном методе выполнения вал 5 вставляется своим концом 17 через цилиндрическую рабочую поверхность 21 в отверстие неподвижного колеса 3. Цилиндрическая рабочая поверхность 21 в отверстие неподвижного колеса 3. Цилиндрическая рабочая поверхность 21 примыкает к заплечику 22, который упирается в поверхность 23 неподвижного колеса 3, названная поверхность 21 является плоской, радиальной к оси 6 и повернутой со стороны сателлита 4. Вал 5 крепится гайкой 24, которая блокируется стопорной шайбой 25. В середине вала 5 имеется гибкая зона 19, образованная стенкой 20 уменьшенной толщины, эта стенка имеет цилиндрическую форму или форму усеченного конуса. Теперь обратимся к описанию специфических пунктов примера 2. Подшипник 8 является роликовым и содержит два ряда роликовых элементов 10 цилиндрической формы, контактирующих с цилиндрическим отверстием 9 сателлита 4 и контактирующих с цилиндрическими дорожками 11 внутреннего кольца 12 подшипника 8. Паз 50 внутреннего кольца 12 содержит в середине кольцеобразную сферическую опорную поверхность 51. Сферическая опорная поверхность 51 является вогнутой, центрированной на оси 6 и ограниченной по оси двумя кольцеобразными и радиальными поверхностями 52 и 53. Шаровой шарнир 54 содержит сферическую выпуклую внешнюю поверхность 55, которая поворачивается вокруг оси с уменьшенным зазором внутри вогнутой по 5 10 15 20 25 30 35 40 45 50 55 14 верхности 51. В предпочтительном методе выполнения шаровой шарнир 54 имеет форму кольца, разграниченного внутри вогнутой цилиндрической поверхностью 56 и разграниченного также по оси двумя радиальными коронообразными поверхностями 57 и 58. Шаровой шарнир 54 монтируется на валу 5. Он устанавливается прижатием его внутренней поверхности 56 к цилиндрической рабочей поверхности 59 вала 5 и упирается своей боковой поверхностью 58 в заплечик 60 вала 5. Шаровой шарнир 54 поддерживается в упоре на заплечике 60 самотормозной гайкой 61, которая навинчивается на вал 5 и которая опирается на названный шаровой шарнир 54 своей боковой поверхностью 57. Чтобы установить шаровой шарнир 54 внутри кольца 12, паз 50 имеет диаметр, больший внешнего диаметра шарового шарнира 54, то есть диаметра сферической поверхности 55. Внутри кольца 12 располагаются два дополнительных паза 62, которые симметричны друг другу относительно геометрической оси 6, и связывает периферические части внутреннего пространства, которое определяется вогнутой сферической поверхностью 51 и остатком паза 50 к одной из сторон кольца 12, названные пазы 62 выходят, таким образом, на поверхность 53. Эти пазы 62 разграничены с внешней стороны соответственно двумя участками цилиндрической поверхности геометрической оси 6, диаметр которых по меньшей мере равен диаметру сферической поверхности 51. Эти пазы 62 также разграничены в боковом направлении двумя параллельными плоскостями, симметричными относительно геометрической оси 6 и расстояние между которыми немного превышает ширину сферической поверхности 61, то есть расстояние между поверхностями 57 и 58, которые разграничивают по оси шаровой шарнир 54. Таким образом, чтобы установить шаровой шарнир 54 внутрь кольца 12, нужно сначала подать шаровой шарнир 54 в паз 50 напротив пазов 62, названный шаровой шарнир 54 поворачивается на 90 градусов, то есть его геометрическая ось перпендикулярна оси 6, а его боковые поверхности 57 и 58 находятся на одной линии с поверхностями, разграничивающими в боковом направлении пазы 62. Затем этот шаровой шарнир 54 вводится в пазы 62 до тех пор, пока его внешняя сферическая поверхность 55 не придет в контакт с вогнутой сферической поверхностью 51. Затем шаровой шарнир 54 по 15 26354 ворачивается на 90 градусов, его геометрическая ось совмещается с осью 6 и названный шаровой шарнир устанавливается внутри вогнутой поверхности 51 кольца 12. Сателлит 4, предварительно установленный на подшипнике 8, располагается затем на валу 5, пока шаровой шарнир 54 не придет в контакт с заплечиком 60, названный шаровой шарнир 54 закрепляется на названном заплечике 60 гайкой 61. Так как передача содержит червячные колеса, сателлит 4 в точке 26 сцепления с внутренней планетарной шестерней 1 и в точке 27 сцепления с внешней планетарной шестерней 7 подвергается воздействию сил реакции 28 и 29, которые являются параллельными геометрической оси вращения 6 и направлены в противоположные стороны. Эти силы реакции 28 и 29 производят так называемый реактивный крутящий момент, который имеет тенденцию опрокинуть сателлит 4 в плоскость, определенную осями 2 и 6. Подшипник 8, установленный в этом примере на шаровом шарнире 54, не может противодействовать этому крутящему моменту. Поэтому передача содержит устройство 63, компенсирующее крутящий момент, действующий на сателлит 4. В предпочтительном методе выполнения компенсирующее устройство 63 имеет два пальца 64, диаметрально противоположные относительно геометрической оси 6, названные пальцы 64 располагаются в плане, перпендикулярном плану, определяемому геометрическими осями 2 и 6, и разрезают этот план по геометрической оси 6, один конец этих пальцев 65 взаимодействует с внутренним кольцом 12 под 5 10 15 20 25 30 35 40 16 шипника 8, в то время как другой конец 66 каждого пальца 64 устанавливается с уменьшенным зазором между стенками 67 и 68 паза 69. Пазы 69 могут быть выполнены в неподвижном колесе 3. Однако в предпочтительном методе выполнения пазы 69 выполняются в заплечике 22 вала 5, и стенки 67 и 68 названных пазов 69 являются плоскими, параллельными друг другу, параллельными геометрической оси 6 и перпендикулярными плану, который определяется геометрическими осями 2 и 6. Таким образом устройство 63, компенсирующее крутящий момент, мешает внутреннему кольцу 12 подшипника 8 поворачиваться вокруг шарового шарнира 54 в плане, определяемом геометрическими осями 2 и 6 под воздействием крутящего момента. Устройство 63 мешает* также этому кольцу 12 поворачиваться на шаровом шарнире 54 по геометрической оси вращения 6 в результате передачи движения, вызываемого вращением сателлита 4 на подшипнике 8. В остальном, устройство 63 не ограничивает свободу кольца 12. Нужно отметить, что компенсирующее устройство 63 может функционировать с одним пальцем 64, но тогда образуется радиальная сила, действующая на шаровой шарнир 54, которая ускоряет его износ и затрудняет ход кольца 12 вокруг названного шарового шарнира 54. Кроме того, чтобы помешать перемещению сателлита 4 вдоль геометрической оси вращения 6, стенка отверстия 9, по которой катятся роликовые элементы 10, разграничивается на концах двумя кольцами 70 и 71, каждое из которых поддерживается клипсами 72 и 73. 26354 37 39 /• ФИГ. 2 26354 "27 жс ИГ ФИГ. 3 Упорядник Техред М. Келемеш Коректор О. Обручар Замовлення 503 Тираж Підписне Державне патентне відомство України, 254655; ГСП, Київ-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул. Гагаріна, 101
ДивитисяДодаткова інформація
Автори англійськоюVirmou Michel Roger Charles
Автори російськоюВирму Мишель Роже Шарль
МПК / Мітки
МПК: F16H 1/28
Мітки: зубчата, передача, варіанти, планетарна, розподіленим, навантаженням
Код посилання
<a href="https://ua.patents.su/11-26354-planetarna-zubchata-peredacha-z-rozpodilenim-navantazhennyam-varianti.html" target="_blank" rel="follow" title="База патентів України">Планетарна зубчата передача з розподіленим навантаженням (варіанти)</a>
Зубчата передача
Номер патенту: 195
Опубліковано: 31.08.1998
Автори: Штонда Євген Геннадійович, Божидарник Віктор Володимирович, Карпенко Володимир Романович
МПК: F16H 1/24
Формула / Реферат:
Зубчатая передача, содержащая два колеса, первое из которых снабжено сепаратором с элементами зацепления, выполненными в виде шаров и размещенными на периферии этого колеса, а второе колесо снабжено лунками по периферии, выполненными соответственно шарам первого колеса, отличающаяся тем, что под элементами зацепления первого колеса размещен пружинящий элемент, при этом тело этого колеса дополнительно снабжено съемным кольцом для обеспечения...
Планетарна прецесійна конічна передача
Номер патенту: 4950
Опубліковано: 28.12.1994
Автори: Золотаренко Віктор Кузьмич, Мартиненко Борис Іванович, Саяпін Олександр Олександрович, Верболоз Анатолій Демидович
МПК: F16H 1/32
Мітки: планетарна, конічна, прецесійна, передача
Формула / Реферат:
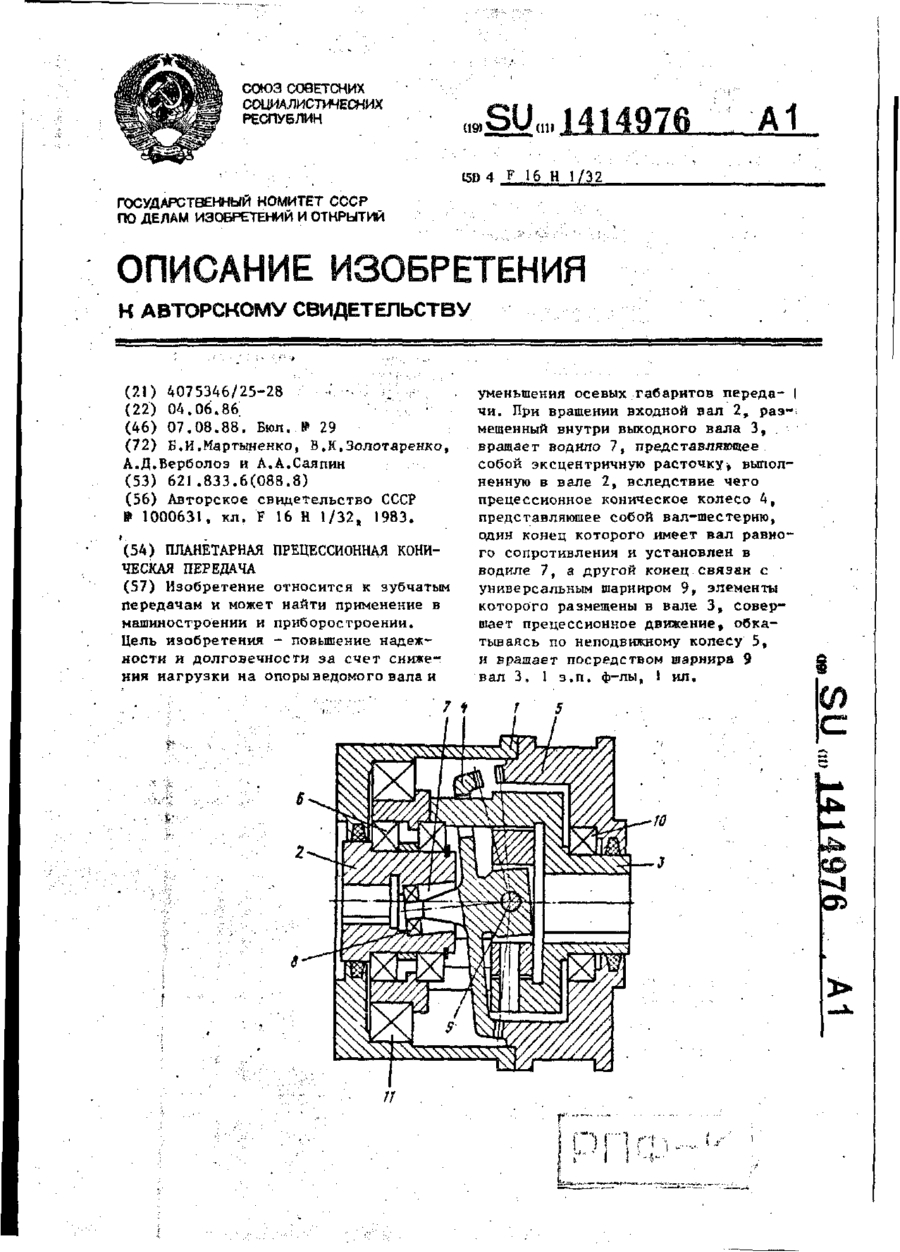
1. Планетарная прецессионная коническая передача, содержащая входной и выходной валы, первый из которых установлен внутри второго, водило, неподвижное коническое колесо, прецессионное коническое колесо, связанное посредством универсального шарнира с выходным валом для взаимодействия с неподвижным коническим колесом, отличающаяся тем, что, с целью повышения надежности и долговечности за счет снижения нагрузки на опоры ведомого вала и...
Зубчата передача
Номер патенту: 25543
Опубліковано: 30.10.1998
Автор: Воронцов Борис Сергійович
МПК: F16H 1/08
Формула / Реферат:
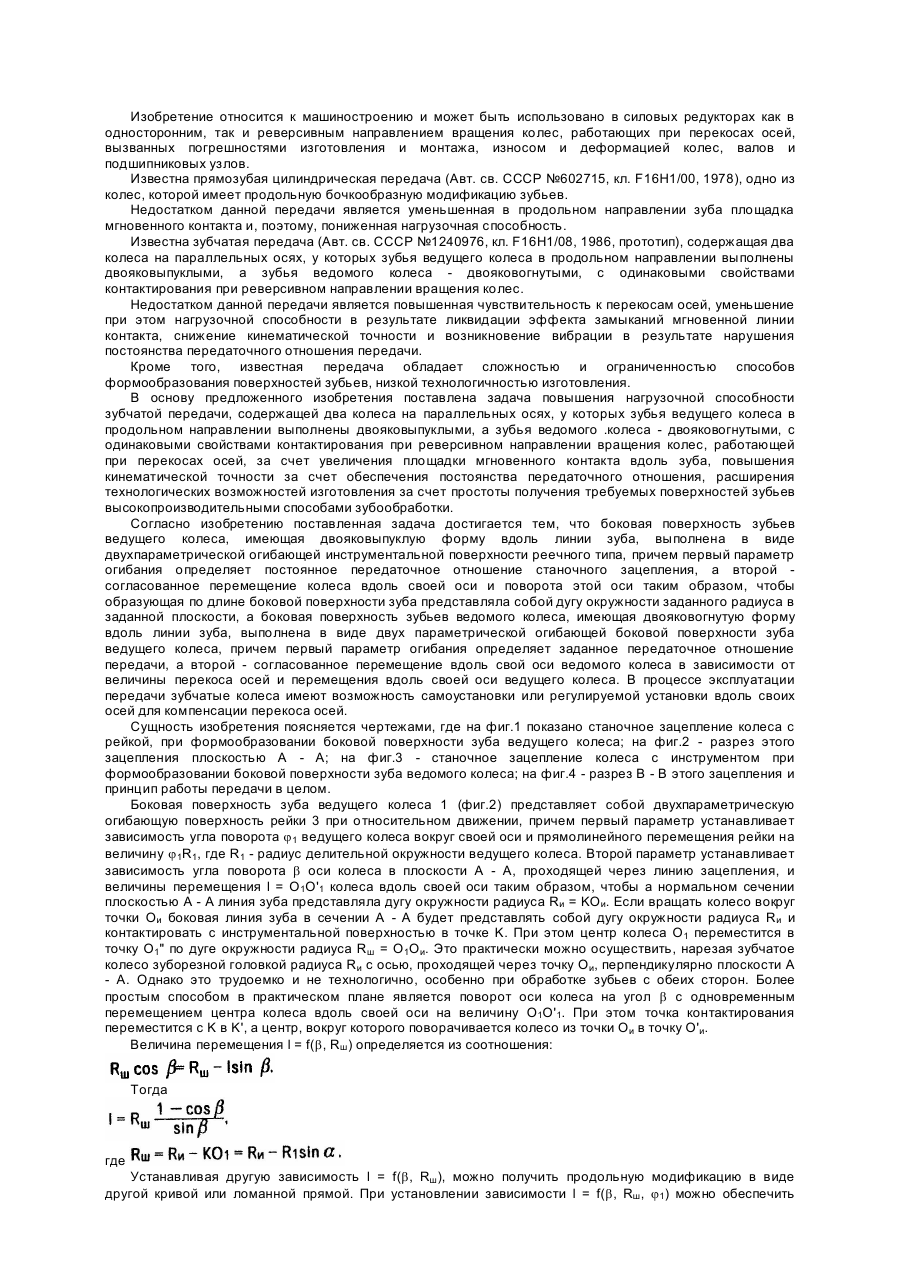
1. Зубчатая передача, содержащая два колеса на параллельных осях, у которых зубья ведущего колеса в продольном направлении выполнены двояковыпуклыми, а зубья ведомого колеса - двояковогнутыми, с одинаковыми свойствами контактирования при реверсивном направлении вращения колес, отличающаяся тем, что боковая поверхность зубьев ведущего колеса, имеющих двояковыпуклую форму вдоль линии зуба, выполнена в виде двухпараметрической огибающей...
Планетарна прецесійна фрикційна передача
Номер патенту: 26160
Опубліковано: 07.06.1999
Автори: Дятел Микола Микитович, Захарченко Валерій Іванович, Синяговський Іван Іванович, Снісаренко Іван Миколайович
МПК: F16H 15/00
Мітки: передача, прецесійна, фрикційна, планетарна
Формула / Реферат:
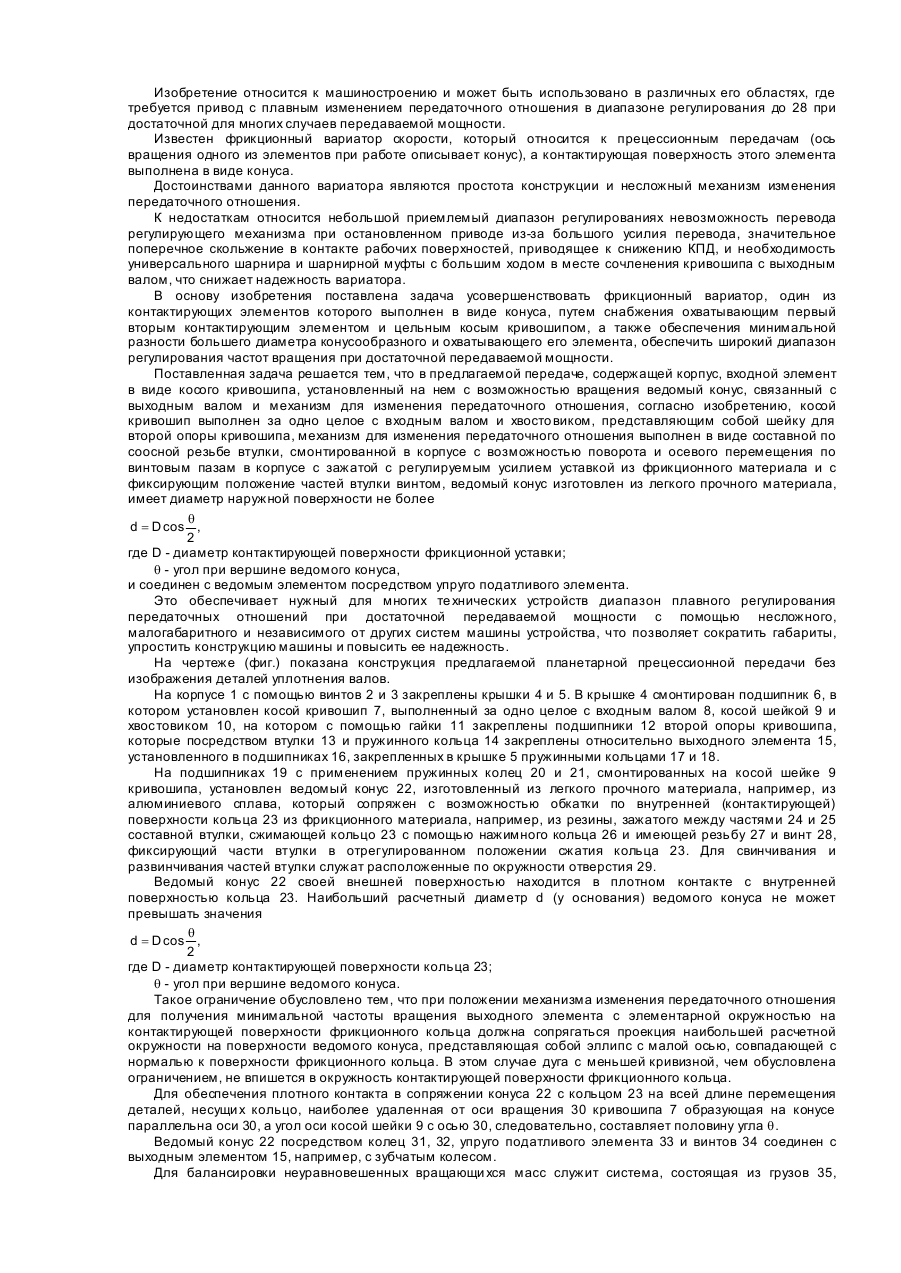
Планетарная прецесионная фрикционная передача, содержащая корпус, входной элемент в виде косого кривошипа, установленный на нем с возможностью вращения ведомый конус, связанный с выходным валом, и механизм для измерения передаточного отношения, отличающаяся тем, что косой кривошип выполнен за одно целое с входным валом и хвостовиком, представляющим собой, шейку для второй опоры кривошипа, механизм для изменения передаточного отношения...
Циліндрична зубчата передача
Номер патенту: 24083
Опубліковано: 31.08.1998
Автори: Кузовков Борис Петрович, Велигин Валерій Олександрович
МПК: F16H 1/18
Мітки: передача, зубчата, циліндрична
Формула / Реферат:
1. Цилиндрическая зубчатая передача с двумя линиями зацепления, содержащая ведущее и ведомое зубчатые колеса, профиль зубьев которых выполнен в виде активной выпуклой головки и активной вогнутой ножки, связанных переходным участком и описанных дугами окружностей, отличающаяся тем, что центры окружностей смещены относительно оси симметрии зуба: у активной выпуклой головки - по направлению к оси симметрии зуба, а у активной вогнутой ножки - по...
Попередній патент: Гідроізолююча конструкція для вікон
Наступний патент: Основа для гранулята лікарського засобу
Випадковий патент: Склад для кислотної обробки карбонатних пластів