Спосіб та пристрій прицілювання ствольної метальної установки, що наводиться вручну, типу линемета

Формула / Реферат
Способ прицеливания наводимой вручную ствольной метательной установки типа линемета, в процессе которого наблюдают объект, куда намереваются забросить груз, например, ракету с линем, учитывают влияние действующего ветра, определяют значения необходимых угловых поправок, оценивают текущее пространственное положение индекса линии ствола, формируемого прицельный приспособлением и связываемого по положению со стволом установки, вручную доворачивают ствол в расчитываемое положение и производят выброс груза, отличающийся тем, что наблюдаемый объект визируют посредством индекса линии визирования, изображение которого формируют неподвижным в поле зрения относительно корпуса прицельного приспособления, которое разворачивают поворотами головы, а изображение индекса линии ствола формируют подвижным в поле зрения прицельного приспособления и сдвигают относительно индекса линии визирования на углы, пропорциональные значениям разностей между величинами углов фактического пространственного положения оси ствола, которое измеряют относительно линии визирования, и величинами углов расчетного требуемого положения оси ствола, при этой угловые поправки непрерывно определяют по отношению к текущему положений линии визирования, ствол доворачивают в направлении совмещения индекса линии ствола с индексом линии визирования, а выброс груза производят в момент этого совмещения.
2. Способ по п. 1, отличающийся тем, что при определении угловых поправок полностью или частично учитывают векторы скоростей перемещения объекта и носителя установки, вектор дистанций до объекта, курс, крен и дифферент (тангаж) носителя, превышение (принижение) объекта по отношений к носителю, вектор начальной скорости выброса груза из ствола, а также аэродинамические и баллистические свойства груза.
3. Устройство прицеливания наводимой вручную ствольной метательной установки типа линемета, содержащее прицельное приспособление, включающее индекс, связанный с пространственным положением ствола установки, отличающееся тем, что прицельное приспособление выполнено в виде визира, например, оптического, укрепленного на дополнительно введенном оголовьи типа шлема-маски для наводчика, в поле зрения визира сформированы посредством узла формирования изображение неподвижного относительно корпуса визира индекса линии визирования и изображение индекса линии ствола, выполненного подвижным относительно индекса линии визирования, при этом ствол установки снабжен дополнительно введенным измерителем углов текущего фактического пространственного положения оси ствола относительно визира, причем выход этого измерителя подсоединен ко входам дополнительно введенного блока определения текущих угловых поправок, снабженного комплектом задатчиков учитываемых кинематических, метеорологических и баллистических факторов, а выход этого блока подключен к узлу формирования индекса линии ствола.
4. Устройство прицеливания по п. 3, отличающееся тем, что комплект задатчиков учитываемых полностью или частично кинематических, метеорологических и баллистических факторов, выполнен в виде совокупности измерительной или датчиков и устройств определения или ввода значений векторов скоростей перемещения объекта и носителя установки, вектора скорости действующего ветра, дистанции до визируемого объекта, курса, крена и дифферента (тангажа) носителя, вектора начальной скорости из ствола забрасываемого груза, а также параметров аэродинамических и баллистических свойств последнего
5. Устройство прицеливания по п. 3, отличающееся тем, что измеритель текущего пространственного положения оси ствола относительно визира выполнен в виде совокупности из реперного узла, установленного фиксированно относительно оси ствола базового блока, и подключенного к ним своими входами блока определения текущего пространственного положения оси ствола относительно линии визирования, выход которого подсоединен к блоку определения текущих угловых поправок.
6. Устройство прицеливания по п. 4, отличающееся тем, что измеритель дистанции до визируемого объекта выполнен в виде светового дальномера, например, лазерного типа, включающего генератор модулированного светового излучения со схемой анализа временных интервалов и вычисления дистанции, а также узел выходной-входной оптики с фотоприемным устройством, при этом последний установлен на оголовьи так, что апертура излучаемого оптического потока коллинеарна линии визирования визира, а выходные оптические компоненты этого узла соединены с генератором светового излучения посредством гибкого светодиода.
7. Устройство прицеливания по п. 4, отличающееся тем, что и реперный узел, и базовый блок выполнены каждый в виде гироскопического двухкоординатного датчика, ортогональные измерительные оси чувствительности которого расположены в плоскостях, перпендикулярных линии визирования и линии оси ствола соответственно, при этом и реперный узел и базовый блок снабжены приспособлением для периодического взаимного согласования направлений осей чувствительности гироскопических датчиков.
Текст
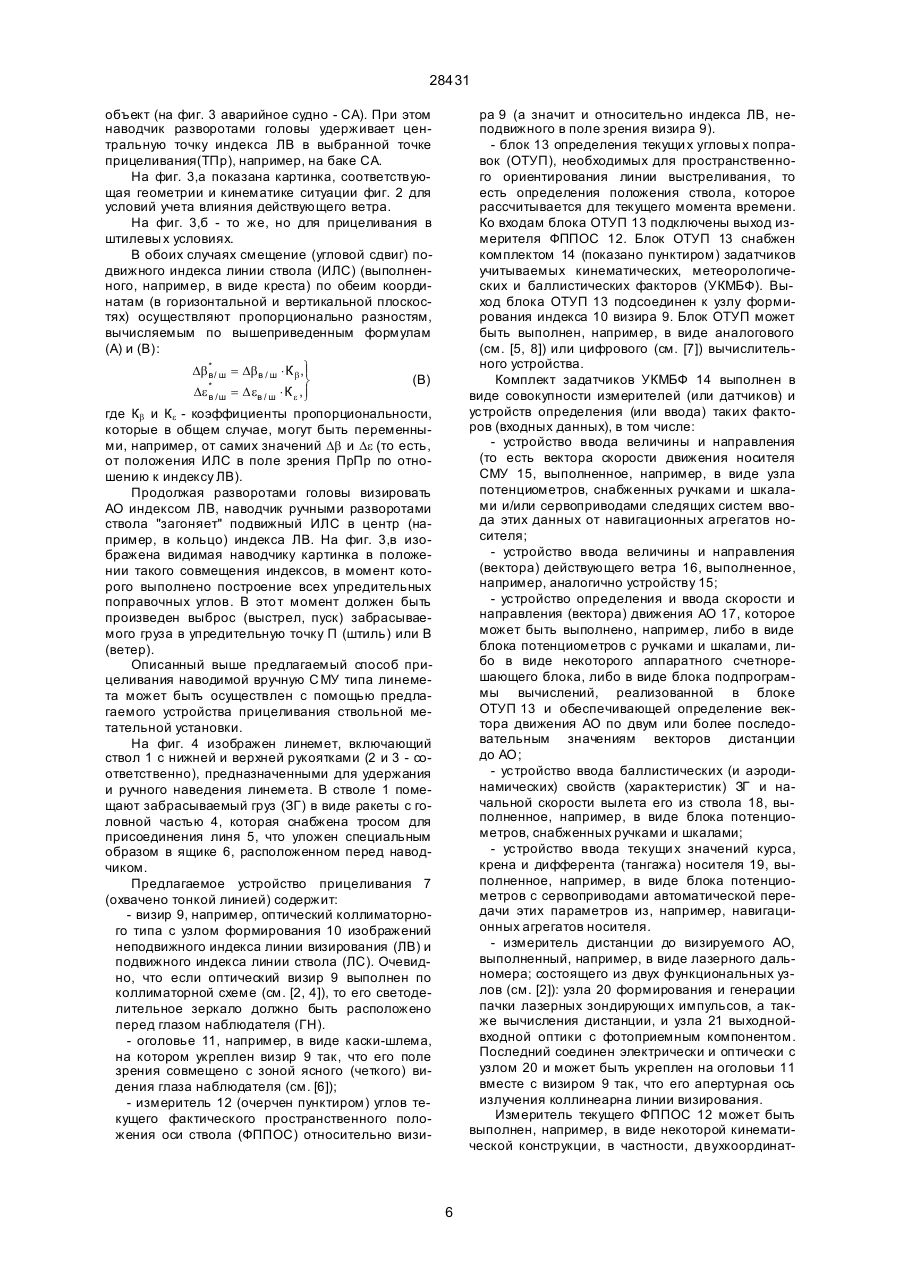
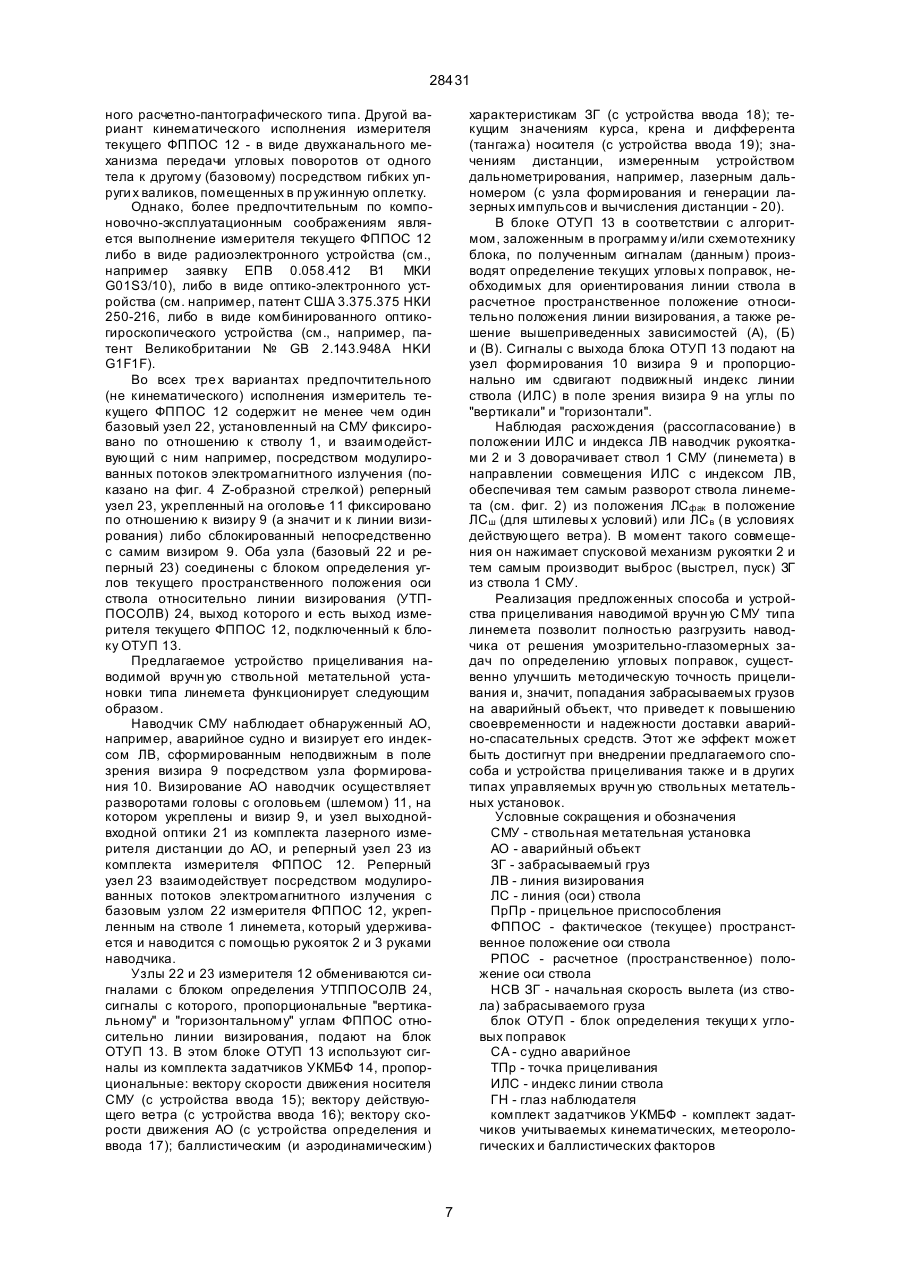
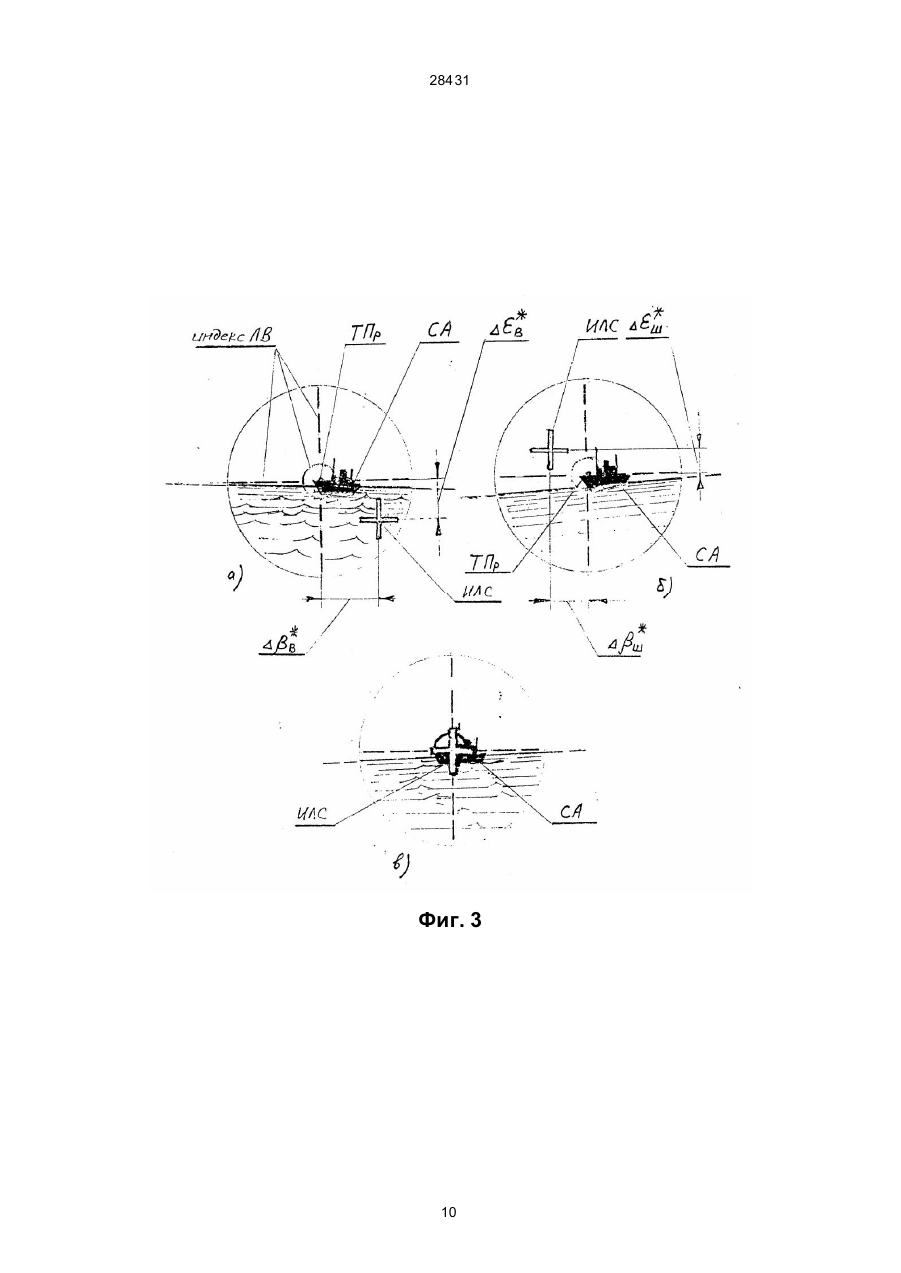
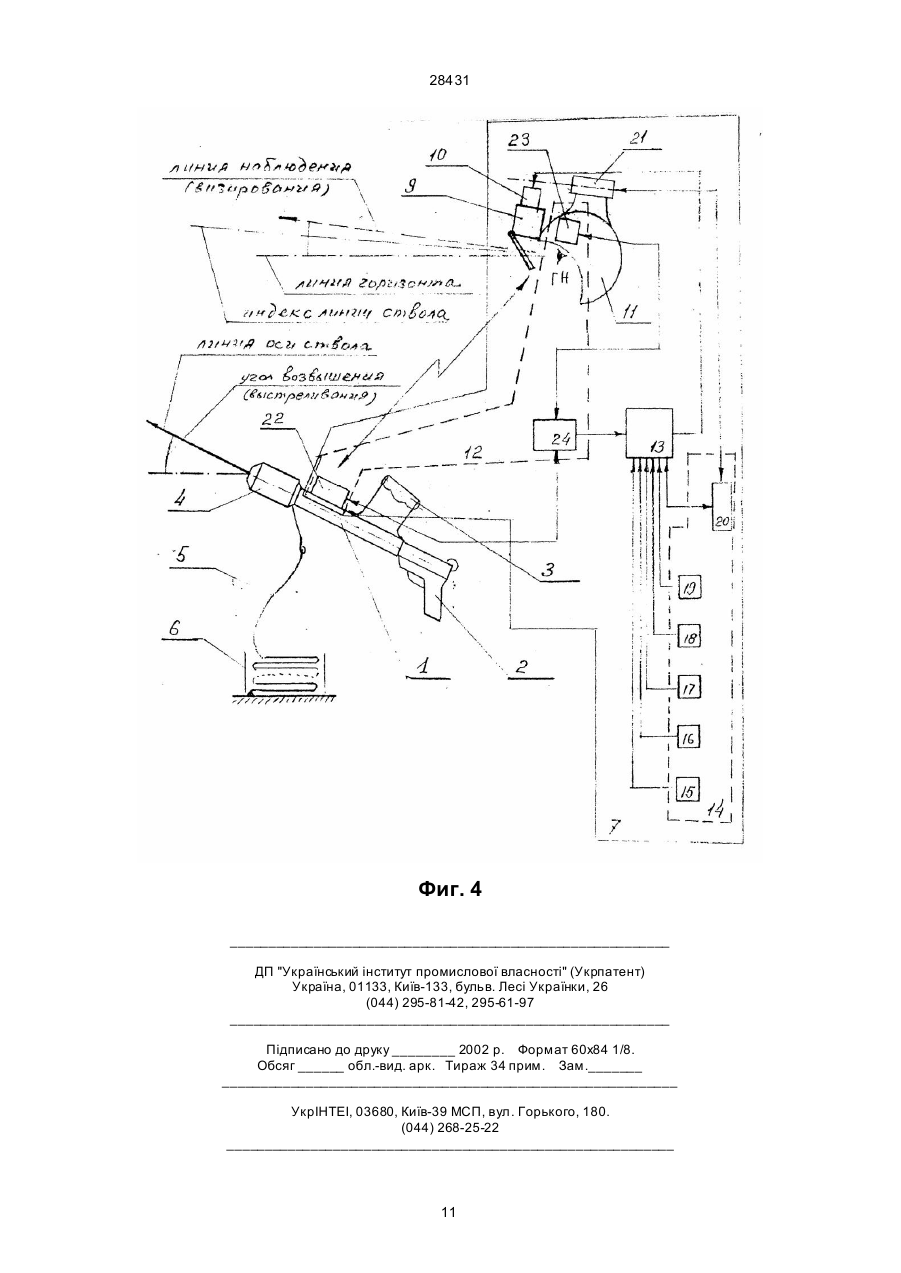
Способ прицеливания наводимой вручную ствольной метательной установка типа линемета, в процессе которого наблюдают объект, куда намереваются забросать груз, например, ракету с линем, учитывают влияние действующего ветра, определяют значения необходимых угловы х поправок, оценивают текущее пространственное положение индекса линии ствола, формируемого прицельным приспособлением и связываемого по положению со стволом установки, вручную доворачивают ствол в расчитываемое положение и производят выброс груза, отличающийся тем, что наблюдаемый объект визируют посредством индекса линии визирования, изображение которого формируют неподвижным в поле зрения относительно корпуса прицельного приспособления, которое разворачивают поворотами головы, а изображение индекса линии ствола формируют подвижным в поле зрения прицельного приспособления и сдвигают относительно индекса линии визирования на углы, пропорциональные значениям разностей между величинами углов фактического пространственного положения оси ствола, которое измеряют относительно линии визирования, и величинами углов расчетного требуемого положения оси ствола, при этом угловые поправки непрерывно определяют по отношению к текущему положению линии визирования, ствол доворачивают в направлении совмещения индекса линии ствола с индексом линии визирования, а выброс груза производят в момент этого совмещения. 2. Способ по п. 1, отличающийся тем, что при определении угловых поправок полностью или частично учитывают векторы скоростей перемещения объекта и носителя установки, вектор дистанции до объекта, курс, крен и дифферент (тангаж) носителя, превышение (принижение) объекта по отношению к носителю, вектор начальной скорости выброса груза из ствола, а также аэродинамические и баллистические свойства груза. 3. Устройство прицеливания наводимой вручную ствольной метательной установки типа линемета, A (54) СПОСІБ ТА ПРИСТРІЙ ПРИЦІЛЮВАННЯ СТВОЛЬНОЇ МЕТАЛЬНОЇ УСТАНОВКИ, ЩО НАВОДИТЬСЯ ВРУЧНУ, ТИПУ ЛИНЕМЕТА 28431 6. Устройство прицеливания по п. 4, отличающееся тем, что измеритель дистанции до визируемого объекта выполнен в виде светового дальномера, например, лазерного типа, включающего генератор модулированного светового излучения со схемой анализа временных интервалов и вычисления дистанции, а также узел выходной-входной оптики с фотоприемным устройством, при этом последний установлен на оголовьи так, что апертура излучаемого оптического потока коллинеарна линии визирования визира, а выходные оптические компоненты этого узла соединены с генератором светового излучения посредством гибкого световода. 7. Устройство прицеливания по п. 5, отличающееся тем, что и реперный узел, и базовый блок выполнены каждый в виде гироскопического двухкоординатного датчика, ортогональные измерительные оси чувстви тельности которого расположены в плоскостях, перпендикулярных линии визирования и линии оси ствола соответственно, при этом и реперный узел и базовый блок снабжены приспособлением для периодического взаимного согласования направлений осей чувствительности гироскопических датчиков. Предлагаемое техническое решение относится к технике обеспечения аварийно-спасательных работ (в частности в горах, на море и т.п.), а более конкретно - к способам и устройствам прицельного забрасывания (метания) на аварийную площадку (объект) средств спасения (линей, буксировочных тросов, кабелей связи, веревочных лестниц и т.д.) или аварийных гр узов (аптечек, запасов продовольствия, аварийного инструмента и т.п.). Оно может быть использовано при разработке нового или модернизации существующего спасательного оборудования, обеспечивающего доставку путем забрасывания спасательных средств и/или грузов на объект, терпящий бедствие. Известна ручная ствольная метательная установка (СМУ) например, линемет, предназначенная для забрасывания линя на аварийное судно. На фиг. 1 схематически изображена ручная линеметная установка, которая содержит (см. [1] cтp. 116-127): ствол 1 с нижней и верхней рукоятками (2 и 3 соответственно), которые служат для удержания и ручного наведения линемета. При этом нижняя рукоятка 2 является откидной и снабжена ударно-спусковым механизмом. В стволе 1 помещают ракету (заряжение с дула) и выбрасывающий (стартовый) пароховой патрон (заряжается с казенной части). Ракета имеет груз в виде головной части 4 из пенопласта, двигатель с твердотопливным зарядом и тягу с тросом, за петлю которого посредством карабина крепится линь 5. Последний уложен специальным образом в ящике 6, располагаемом перед наводчиком, и вытягивается из него после выстрела улетающей ракетой. Верхняя рукоятка 3, расположенная под углом 15° в вертикальной плоскости по отношению к стволу 1, служит для удержания линемета левой рукой и является одновременно прицельным приспособлением 7, с риской 8 (индексом) на верхней поверхности кронштейна, обозначающим плоскость выстреливания (бросания) ракеты с линем в сторону аварийного объекта (судна). Прицеливание известного линемета осуществляют следующим образом (см. стр. 124-125 упомянутой книги). Удерживая линемет обеими руками: - наблюдают и следят за перемещающимся (в относительном движении) аварийным объектом (АО), - глазомерно учитывают величину ожидаемого поперечного сноса летящей ракеты действующим ветром на дистанции полета до объекта, - на глаз определяют необходимое направление (плоскость) выстреливания, то есть положение оси (линии) ствола по горизонту, - ориентируясь по риске-индексу, расположенному в одной (вертикальной) плоскости с осью ствола и обозначающему плоскость выстреливания, оценивают действительно (фактическое) пространственное положение линии (оси) ствола линемета, - доворачивают ствол линемета на глазомерно-интуитивно рассчитанные угловые поправки и, наконец производят выстреливание ракеты в направлении, необходимом (по интуитивным расчетам наводчика) для попадания груза на аварийный объект. Известный способ и устройство прицеливания линемета имеют весьма серьезный недостаток, заключающийся в том, что в них учитывается глазомерно лишь ожидаемый поперечный снос забрасываемого груза (ракеты с линем) действующим (то есть, эквивалентным по эффекту, равномерным по скорости и постоянным по направлению) ветром, причем направление его учитывают весьма грубо - либо слева, либо справа по отношению к плоскости выстреливания. Следствие этого недостатка - значительные промахи в забрасывании груза как по дальности (поскольку дальность до аварийного судна почти не учитывают, так как в известном способе рекомендовано планку с индексом плоскости выстреливания при прицеливании держать горизонтально, что вряд ли возможно в условиях качки спасательного корабля-носителя), так и по боковому направлению (изза неучета, например, скоростей движения аварийного объекта и носителя аэродинамических свойств ракеты забрасываемым грузом, и др.). Это вынуждает к повторным попыткам забрасывания линя (груза) и, соответственно, к потерям времени и повышенному расходу забрасываемых средств. Другой недостаток заключается в том, что конструктивное исполнение примененного в известном линемете прицельного приспособления, выполненного в виде кронштейна верхней рукоятки, на верхней грани которого нанесена риска под фиксированным углом к оси ствола, олицетворяющая индекс плоскости (а значит и линии) выстреливания забрасываемого груза (ЗГ), вызывает не 2 28431 удобство пользования. Дело в том, что и само прицельное приспособление, и реализуемый с его помощью способ прицеливания требуют от наводчика одновременного наблюдения (видения) и аварийного объекта (АО), находящегося вдали (на горизонте), и риски-индекса, расположенного вблизи внизу на кронштейне линемета в конусе наблюдения. Но такая одновременность наблюдения двух предметов, расположенных на существенно разных дистанциях, и от глаз наводчика, между которыми угловое расстояние составляет 50°¸90°, невозможно. К тому же требуется переаккомодация зрения с неизбежными затратами времени. Таким образом в дополнение к методическим ошибкам глазомерно упрощенного способа прицеливания имеет место психогенная напряженность в действиях наводчика при прицеливании и доворотах линемета и, соответственно, неизбежны дополнительные ошибки в исполнении пространственного ориентирования линии выстреливания груза, а значит - траектории полета ракеты с линем к АО. В основу изобретения поставлена задача, вопервых, повышения методической точности выполнения прицеливания и освобождения наводчика от умозрительно-интуитивного построения потребного пространственного положения линии выстреливания совпадающей с линией оси ствола установки, и, во-вторых, упрощения действий наводчика за счет исключения необходимости отрывать взгляд от АО для спорадического осмотра фактического положения индекса линии выстреливания, т.е. линии ствола (ЛС), и за счет обеспечения мнемоничности доворотов в нужное положение ствола линемета, удерживаемого руками. Для решения поставленной задачи предложен новый способ и новое устройство прицеливания наводимой вручную ствольной метательной установки (СМУ), предназначенной для забрасывания груза на наблюдаемый объект, например, типа линемета, а именно; 1) в способе прицеливания, в ходе которого наблюдают объект, куда намереваются забросить груз, например, ракету с линем, учитывают влияние действующего ветра, определяют значения необходимых угловых поправок, оценивают текущее пространственное положение индекса линии ствола, формируемого прицельным приспособлением и связываемого по положению со стволом установки, доворачивают ствол в расчетываемое положение и производят выброс (метание) груза, наблюдаемый объект визируют посредством индекса линии визирования, изображение которого формируют неподвижным в поле зрения относительно корпуса прицельного приспособления, которое разворачивают поворотами головы, а индекс линии ствола формируют подвижным в поле зрения прицельного приспособления и сдвигают относительно индекса линии визирования на углы, пропорциональные значениям разностей между величинами углов фактического пространственного положения оси ствола, которые измеряют относительно линии визирования, и величинами углов расчетного требуемого положения оси ствола, которые непрерывно определяют с уче том угловых поправок по отношению к текущему положе нию линии визирования, при этом ствол доворачивают в направлении совмещения индекса линии ствола с индексом линии визирования, а выброс груза производят в момент этого совмещения. В этом новом способе прицеливания при определении угловых поправок на требуемое пространственное положение оси ствола по отношению к текущему положению линии визирования учитывают полностью или частично векторы скоростей перемещения объекта и носителя установки, вектор дистанции до объекта, вектор скорости действующего ветра, курс крен и дифферент (тангаж) носителя, текущее превышение (принижение) объекта над носителем, вектор начальной скорости вылета из ствола забрасываемого груза, а также аэродинамические и баллистические свойства последнего. 2) в устройстве прицеливания, содержащем прицельное приспособление, включающее индекс, связанный с пространственным положением оси ствола установки, прицельное приспособление выполнено в виде оптического визира, укрепленного на дополнительно введенном оголовьи типа шлема-каски для наводчика, в поле зрения визира сформированы посредством узлов формирования изображение неподвижного относительно корпуса визира индекса линии визирования и изображение индекса линии ствола, выполненного подвижным относительно индекса линии визирования, при этом ствол метательной установки снабжен дополнительно введенным измерителем углов текущего пространственного положения оси ствола относительно визира, причем выход этого измерителя подсоединен ко входу дополнительно введенного блока определения необходимых текущи х угловы х поправок, снабженный комплектом дополнительно введенных задатчиков учитываемых кинематических, метеорологических и баллистических факторов, а выход этого блока подключен к узлу формирования изображения индекса линии ствола. Комплект задатчиков учитываемых кинематических, метеорологических и баллистических факторов может быть выполнен в виде совокупности измерителей (или датчиков) и устройств ввода (или определения) векторов скоростей движения объекта и носители установки, вектора скорости действующего ветра, вектора дистанции до объекта, курса, крена и дифферента (тангажа) носителя, вектора начальной скорости вылета из ствола забрасываемого груза, текущего превышения (принижения) объекта над носителем, а также параметров аэродинамических и баллистических свойств гр уза. Сопоставительный анализ предлагаемого способа и способа-прототипа доказывает, что предлагаемый способ прицеливания наводимой вручную СМУ отличается от известного следующими операциями и особенностями: а) объект (аварийное судно), на который намереваются забросить груз, например, ракету с линем, не только наблюдают, но и визируют посредством индекса линии визирования (ЛВ), изображение которого формируют неподвижным в поле зрения прицельного приспособления (ПрПр); 3 28431 б) для визирования АО индексом ЛВ прицельною приспособление (ПрПр) разворачивают поворотами головы; в) изображение индекса линии ствола (ЛС) формируют подвижным в поле зрения ПрПр и сдвигают его относительно индекса ЛВ на углы (по углу возвышения и боковому углу), которые назначают пропорционально значениям разностей между величинами углов фактического (текущего) пространственного положения оси ствола (ФППОС) и величинами углов расчетного (пространственного) положения оси ствола (РПОС), требуемого для попадания забрасываемого груза на объект; г) требуемое РПОС определяют в виде угловых поправок по отношению к текущему положению ЛВ, которые рассчитывают с полным или частичным учетом векторов скоростей перемещения АО и носителя СМУ, вектора дистанции до АО, текущи х значений курса крена и дифферента (тангажа) носителя, текущего превышения (принижения) объекта над носителем, вектора начальной скорости вылета из ствола забрасываемого груза (НСВЗГ), а также параметров аэродинамических и баллистических характеристик последнего; д) углы текущего ФППОС измеряют относительно ЛВ; е) довороты ствола вручн ую осуществляют в направлении перемещения индекса ЛС к индексу ЛВ , наблюдаемым в поле зрения ПрПр, до их совмещения; ж) выброс (выстрел) ЗГ производят в момент совмещения обоих индексов. Сопоставительный анализ предлагаемого устройства прицеливания и устройства-прототипа показывает, что предлагаемое устройство прицеливания наводимой вручную ствольной метательной установки типа линемета отличается следующими признаками: з) прицельное приспособление (ПрПр), являющееся основным компонентом предлагаемого устройства прицеливания, выполнено в виде визира, например, оптического, который укреплен не на СМУ, а на дополнительно введенном оголовьи типа шлема-каски для наводчика; и) в поле зрения визира с помощью входящих в его состав узлов формирования воспроизводятся (сформированы) изображения неподвижного относительно корпуса визира индекса ЛВ и подвижного относительно корпуса визира (а значит относительно индекса ЛВ) индекса ЛС; к) ствол СМУ снабжен дополнительным измерителем углов текущего ФППОС относительно визира, а значит - относительно индекса ЛВ; л) этот измеритель углов текущего ФППОС своим выходом подсоединен ко входу дополнительного блока определения необходимых текущи х угловы х поправок (ОНТУП), который снабжен комплектом задатчиков учитываемых (полностью или частично) кинематических, метеорологических и баллистических факторов; м) выход блока ОНТУП подключен к узлу формирования индекса ЛС; н) комплект задатчиков, упомянутых в признаке "л", выполнен виде совокупности измерителей (или датчиков) и устройств ввода или определе ния векторов скоростей движения АО и носителя СМУ, вектора скорости действующего ветра, вектора дистанции до АО, текущи х к урса, крена и дифферента (тангажа) носителя, вектора НСВ ЗГ, а также параметров аэродинамических и баллистических свойств ЗГ. Таким образом, предлагаемые технические решения, а именно: способ прицеливания наводимой вручную С МУ типа линемета и устройство для его осуществления являются новыми, поскольку содержат указанные выше отличительные признаки как в виде дополнительных (новых) операций/действий и их последовательности в сочетании с операциями прототипа, так и в виде новых (дополнительных) компонентов устройства прицеливания СМУ и их взаиморасположения (взаимосвязей) с существующими в прототипе. Известны сами по себе вновь вводимые операции предлагаемого способа. В частности известна операция визирования некоторого удаленного предмета, например, оптическими средствами (телескопическими или коллиматорными визирами - см., например [2, 3]). Известны также операции и устройства формирования подвижных и неподвижных индексов в поле зрения визиров (см. [4]). В ряде изобретений (например, СССР 1.356.748, G01S11/00; США: 4.054.881, 343/112Р; США: 4.394.831, 89/41 ЕА; Великобритании: 2.143.948А, C1F1F или G01C/00:) описаны схемотехника и операции измерения углов взаимного разворота (ориентирования) двух предметов, один из которых считают опорным (базовым), другой подвижным (поворотным) относительно первого. В частности, схемотехника, описанная в заявке ЕПВ.0058.412 В1, МКИ G01S3/10 полностью обеспечивает измерения углов взаимного пространственного разворота некоторого базового предмета (в нашем случае - ствола СМУ) относительно другого; подвижного (в нашем случае - визира, укрепленного на оголовьи наводчика). Известны операции (например, в форме последовательных вычислений и сопоставлений - операций) определения угловых поправок по отношению к пространственному положению ЛВ, для ориентирования линии бросания какого-либо груза (см. [2, 5]), а также различная схемотехника реализации блоков определения таких поправок (там же). Таким образом, предлагаемые способ и устройство прицеливания наводимой вручную ствольной метательной установки типа линемета, является промышленно реализуемыми, в смысле осуществимости как вновь вводимых операций и компонентов, так и в их сочетании с существующими операциями и компонентами. Предложенные способ и устройство прицеливания наводимой вручную СМУ обеспечивают более удобное и притом мнемонически более простое выполнение ручного наведения СМУ типа линемета для попадания ЗГ на АО. При этом также обеспечиваются более высокая методическая точность определения места падения ЗГ и учета упрежденных перемещений АО, а сами операции учета влияющи х кинематических, метеорологических факторов переданы техническим звеньям устройства прицеливания, то есть, наводчик освобожден от каких бы то ни было глазомерных определений и мысленных расчетов. 4 28431 Это все свидетельствуе т об изобретательном уровне решения поставленной технической задачи. Следовательно предлагаемые способ и устройство прицеливания наводимой вручную С МУ соответствует всем необходимым критериям патентоспособности. Изложенная сущность предлагаемого технического решения "Способ и устройство наводимой вручн ую ствольной метательной установки типа линемета" поясняется прилагаемыми чертежами и нижеследующим описанием. Так: - на фиг. 1 изображены схематически элементы существующего способа и конструктивная схема СМУ с известным устройством прицеливания; - на фиг. 2 представлена в горизонтальной проекции ("в плане") схема кинематического взаимодействия судна-носителя с линеметом, аварийного судна-объекта и два варианта векторного решения задачи о попадании ЗГ на движущийся АО: при наличии и в отсутствие действующего ветра; - на фиг. 3 показаны схематически картинки, наблюдаемые наводчиком в поле зрения визира предлагаемого устройства прицеливания; - на фиг. 4 изображена конструктивная схема предлагаемого устройства прицеливания СМУ типа линемета. На фиг. 2 изображены (в проекции на горизонтальную плоскость) Н - носитель (например, судно-спасатель) СМУ ЛБш - расчетная линия бросания ЗГ в условиях штиля; ЛБв - то же, но в условиях влияния действующего ве тра U ; ЛСш - расчетное положение линии ствола, определяемое путем построения упредительного DНОП, то есть в условиях штиля; ЛСв - то же, но определенное путем построения упредительного НОПВ, то есть в условиях влияния действующего ветра U ; ЛСфак - фактическое положение линии ствола в текущий момент времени; jс - курсовой (текущий) угол вектора текущей дистанции D тек до визируемого объекта (т.О); y - курсовой (текущий) угол вектора действующего ве тра U ; b ш - текущая угловая поправка по горизонту для расчетного положения ЛСш, определяемая для условий штиля; b в - то же , но для расчетного положения ЛСв, определяемого в условиях действующего ветра U ; b фак - фактический угол линии ствола по горизонту в текущий момент времени; Db ш - текущий угол доворота ствола по горизонту, определяем для условий штиля; Db в - то же, но определяемый в условиях действующего ветра U . Из анализа геометрических и кинематических соотношений в упредительном DНОП и/или в упредительном а НОПВ (см. фиг. 2) вытекает: Dbш = ±(bш - bфак )ü (А) (по горизонту) Dbв = ±(bв - bфак ) ý þ типа линемета, движущейся со скоростью W н ; О - аварийный объект (аварийное судно) движущейся со скоростью Vc находящийся на текущей дистанции D тек от Н; П - точка падения забрасываемого груза; В - условная точка рассчитываемая при учете сноса забрасываемого груза действующим вет Очевидно, что упредительные соотношения и соответствующие многоугольники могут быть построены и в проекции на вертикальную плоскость, задаваемую положением линии визирования, совпадающей по направлению с вектором текущей дистанции D тек . Понятно, что в этих соотношениях имеет место полный или частичный учет текущего превышения (принижения) объекта (т. О) по отношению к носителю (т. Н), а также баллистических и аэродинамических свойств летящего по некоторой траектории ЗГ. В частности, учитывают величины: eс - угол места визируемого АО eЛСфак - угол места фактического положения ЛС в вертикальной плоскости в текущий момент времени; a в/ш - поправочный угол на понижение ЗГ в полете к т. П для полного или частичного учета аэродинамики и баллистики ЗГ с учетом ветра или в условиях штиля. По аналогии с предыдущим: (Б) Deв/ш=±(eс+a в/ш-eЛСфак )×Мg,q (по вертикали) где Мg,q - матрица учета текущи х значений крена (g) и дифферента (q) носителя СМУ. На фиг. 3 показаны (схематически) картинки полей зрения прицельного приспособления (выполненного, например в виде оптического визира телескопического или коллиматорного типов), которые наводчик СМУ видит, наблюдая аварийный ром U ; DНОП - упредительный треугольник, рассчитываемый в условия х безветрия, то есть в штиль; НОПВ - упредительный четырехугольник, рассчитываемый с учетом влияния действующего ветра; Т - упредительное время, равное времени полета забрасываемого груза из т. Н в т. П; Vc × T - упредительный вектор перемещения АО из т. О в т. П; U × T - вектор учитываемого сноса ЗГ действующим ветром U за время полета ЗГ из т. Н в т. П; Vср.ш - вектор средней скорости полета ЗГ на дистанцию от т. Н до т. П в условиях штиля; Vср .в - то же, но в условиях влияния действующего ветра U ; Vб.ш - вектор осредненной скорости бросания ЗГ в условиях штиля; Vб .в - то же, но в условиях влияния действующего ве тра U ; 5 28431 объект (на фиг. 3 аварийное судно - СА). При этом наводчик разворотами головы удерживает центральную точку индекса ЛВ в выбранной точке прицеливания(ТПр), например, на баке СА. На фиг. 3,а показана картинка, соответствующая геометрии и кинематике ситуации фиг. 2 для условий учета влияния действующего ветра. На фиг. 3,б - то же, но для прицеливания в штилевы х условиях. В обоих случаях смещение (угловой сдвиг) подвижного индекса линии ствола (ИЛС) (выполненного, например, в виде креста) по обеим координатам (в горизонтальной и вертикальной плоскостях) осуществляют пропорционально разностям, вычисляемым по вышеприведенным формулам (А) и (В): Db* / ш = Dbв / ш × К b ,ü ï в (В) ý De * / ш = D eв / ш × К e , ï в þ где Кb и Кe - коэффициенты пропорциональности, которые в общем случае, могут быть переменными, например, от самих значений Db и De (то есть, от положения ИЛС в поле зрения ПрПр по отношению к индексу ЛВ). Продолжая разворотами головы визировать АО индексом ЛВ, наводчик ручными разворотами ствола "загоняет" подвижный ИЛС в центр (например, в кольцо) индекса ЛВ. На фиг. 3,в изображена видимая наводчику картинка в положении такого совмещения индексов, в момент которого выполнено построение всех упредительных поправочных углов. В это т момент должен быть произведен выброс (выстрел, пуск) забрасываемого груза в упредительную точку П (штиль) или В (ветер). Описанный выше предлагаемый способ прицеливания наводимой вручную С МУ типа линемета может быть осуществлен с помощью предлагаемого устройства прицеливания ствольной метательной установки. На фиг. 4 изображен линемет, включающий ствол 1 с нижней и верхней рукоятками (2 и 3 - соответственно), предназначенными для удержания и ручного наведения линемета. В стволе 1 помещают забрасываемый груз (ЗГ) в виде ракеты с головной частью 4, которая снабжена тросом для присоединения линя 5, что уложен специальным образом в ящике 6, расположенном перед наводчиком. Предлагаемое устройство прицеливания 7 (охвачено тонкой линией) содержит: - визир 9, например, оптический коллиматорного типа с узлом формирования 10 изображений неподвижного индекса линии визирования (ЛВ) и подвижного индекса линии ствола (ЛС). Очевидно, что если оптический визир 9 выполнен по коллиматорной схеме (см. [2, 4]), то его светоделительное зеркало должно быть расположено перед глазом наблюдателя (ГН). - оголовье 11, например, в виде каски-шлема, на котором укреплен визир 9 так, что его поле зрения совмещено с зоной ясного (четкого) видения глаза наблюдателя (см. [6]); - измеритель 12 (очерчен пунктиром) углов текущего фактического пространственного положения оси ствола (ФППОС) относительно визи ра 9 (а значит и относительно индекса ЛВ, неподвижного в поле зрения визира 9). - блок 13 определения текущи х угловы х поправок (ОТУП), необходимых для пространственного ориентирования линии выстреливания, то есть определения положения ствола, которое рассчитывается для текущего момента времени. Ко входам блока ОТУП 13 подключены выход измерителя ФППОС 12. Блок ОТУП 13 снабжен комплектом 14 (показано пунктиром) задатчиков учитываемых кинематических, метеорологических и баллистических факторов (УКМБФ). Выход блока ОТУП 13 подсоединен к узлу формирования индекса 10 визира 9. Блок ОТУП может быть выполнен, например, в виде аналогового (см. [5, 8]) или цифрового (см. [7]) вычислительного устройства. Комплект задатчиков УКМБФ 14 выполнен в виде совокупности измерителей (или датчиков) и устройств определения (или ввода) таких факторов (входных данных), в том числе: - устройство ввода величины и направления (то есть вектора скорости движения носителя СМУ 15, выполненное, например, в виде узла потенциометров, снабженных ручками и шкалами и/или сервоприводами следящих систем ввода этих данных от навигационных агрегатов носителя; - устройство ввода величины и направления (вектора) действующего ветра 16, выполненное, например, аналогично устройству 15; - устройство определения и ввода скорости и направления (вектора) движения АО 17, которое может быть выполнено, например, либо в виде блока потенциометров с ручками и шкалами, либо в виде некоторого аппаратного счетнорешающего блока, либо в виде блока подпрограммы вычислений, реализованной в блоке ОТУП 13 и обеспечивающей определение вектора движения АО по двум или более последовательным значениям векторов дистанции до АО; - устройство ввода баллистических (и аэродинамических) свойств (характеристик) ЗГ и начальной скорости вылета его из ствола 18, выполненное, например, в виде блока потенциометров, снабженных ручками и шкалами; - устройство ввода текущи х значений курса, крена и дифферента (тангажа) носителя 19, выполненное, например, в виде блока потенциометров с сервоприводами автоматической передачи этих параметров из, например, навигационных агрегатов носителя. - измеритель дистанции до визируемого АО, выполненный, например, в виде лазерного дальномера; состоящего из двух функциональных узлов (см. [2]): узла 20 формирования и генерации пачки лазерных зондирующи х импульсов, а также вычисления дистанции, и узла 21 выходнойвходной оптики с фотоприемным компонентом. Последний соединен электрически и оптически с узлом 20 и может быть укреплен на оголовьи 11 вместе с визиром 9 так, что его апертурная ось излучения коллинеарна линии визирования. Измеритель текущего ФППОС 12 может быть выполнен, например, в виде некоторой кинематической конструкции, в частности, двухкоординат 6 28431 ного расчетно-пантографического типа. Другой вариант кинематического исполнения измерителя текущего ФППОС 12 - в виде двухканального механизма передачи угловых поворотов от одного тела к другому (базовому) посредством гибких упруги х валиков, помещенных в пр ужинную оплетку. Однако, более предпочтительным по компоновочно-эксплуатационным соображениям является выполнение измерителя текущего ФППОС 12 либо в виде радиоэлектронного устройства (см., например заявку ЕПВ 0.058.412 В1 МКИ G01S3/10), либо в виде оптико-электронного устройства (см. например, патент США 3.375.375 НКИ 250-216, либо в виде комбинированного оптикогироскопического устройства (см., например, патент Великобритании № GB 2.143.948A HKИ G1F1F). Во всех тре х вариантах предпочтительного (не кинематического) исполнения измеритель текущего ФППОС 12 содержит не менее чем один базовый узел 22, установленный на СМУ фиксировано по отношению к стволу 1, и взаимодействующий с ним например, посредством модулированных потоков электромагнитного излучения (показано на фиг. 4 Z-образной стрелкой) реперный узел 23, укрепленный на оголовье 11 фиксировано по отношению к визиру 9 (а значит и к линии визирования) либо сблокированный непосредственно с самим визиром 9. Оба узла (базовый 22 и реперный 23) соединены с блоком определения углов текущего пространственного положения оси ствола относительно линии визирования (УТППОСОЛВ) 24, выход которого и есть выход измерителя текущего ФППОС 12, подключенный к блоку ОТУП 13. Предлагаемое устройство прицеливания наводимой вручн ую ствольной метательной установки типа линемета функционирует следующим образом. Наводчик СМУ наблюдает обнаруженный АО, например, аварийное судно и визирует его индексом ЛВ, сформированным неподвижным в поле зрения визира 9 посредством узла формирования 10. Визирование АО наводчик осуществляет разворотами головы с оголовьем (шлемом) 11, на котором укреплены и визир 9, и узел выходнойвходной оптики 21 из комплекта лазерного измерителя дистанции до АО, и реперный узел 23 из комплекта измерителя ФППОС 12. Реперный узел 23 взаимодействует посредством модулированных потоков электромагнитного излучения с базовым узлом 22 измерителя ФППОС 12, укрепленным на стволе 1 линемета, который удерживается и наводится с помощью рукояток 2 и 3 руками наводчика. Узлы 22 и 23 измерителя 12 обмениваются сигналами с блоком определения УТППОСОЛВ 24, сигналы с которого, пропорциональные "вертикальному" и "горизонтальному" углам ФППОС относительно линии визирования, подают на блок ОТУП 13. В этом блоке ОТУП 13 используют сигналы из комплекта задатчиков УКМБФ 14, пропорциональные: вектору скорости движения носителя СМУ (с устройства ввода 15); вектору действующего ветра (с устройства ввода 16); вектору скорости движения АО (с устройства определения и ввода 17); баллистическим (и аэродинамическим) характеристикам ЗГ (с устройства ввода 18); текущим значениям курса, крена и дифферента (тангажа) носителя (с устройства ввода 19); значениям дистанции, измеренным устройством дальнометрирования, например, лазерным дальномером (с узла формирования и генерации лазерных импульсов и вычисления дистанции - 20). В блоке ОТУП 13 в соответствии с алгоритмом, заложенным в программу и/или схемотехнику блока, по полученным сигналам (данным) производят определение текущих угловы х поправок, необходимых для ориентирования линии ствола в расчетное пространственное положение относительно положения линии визирования, а также решение вышеприведенных зависимостей (А), (Б) и (В). Сигналы с выхода блока ОТУП 13 подают на узел формирования 10 визира 9 и пропорционально им сдвигают подвижный индекс линии ствола (ИЛС) в поле зрения визира 9 на углы по "вертикали" и "горизонтали". Наблюдая расхождения (рассогласование) в положении ИЛС и индекса ЛВ наводчик рукоятками 2 и 3 доворачивает ствол 1 СМУ (линемета) в направлении совмещения ИЛС с индексом ЛВ, обеспечивая тем самым разворот ствола линемета (см. фиг. 2) из положения ЛС фак в положение ЛСш (для штилевы х условий) или ЛС в (в условиях действующего ветра). В момент такого совмещения он нажимает спусковой механизм рукоятки 2 и тем самым производит выброс (выстрел, пуск) ЗГ из ствола 1 СМУ. Реализация предложенных способа и устройства прицеливания наводимой вручн ую С МУ типа линемета позволит полностью разгрузить наводчика от решения умозрительно-глазомерных задач по определению угловых поправок, существенно улучшить методическую точность прицеливания и, значит, попадания забрасываемых грузов на аварийный объект, что приведет к повышению своевременности и надежности доставки аварийно-спасательных средств. Этот же эффект может быть достигнут при внедрении предлагаемого способа и устройства прицеливания также и в других типах управляемых вручн ую ствольных метательных установок. Условные сокращения и обозначения СМУ - ствольная метательная установка АО - аварийный объект ЗГ - забрасываемый груз ЛВ - линия визирования ЛС - линия (оси) ствола ПрПр - прицельное приспособления ФППОС - фактическое (текущее) пространственное положение оси ствола РПОС - расчетное (пространственное) положение оси ствола НСВ ЗГ - начальная скорость вылета (из ствола) забрасываемого груза блок ОТУП - блок определения текущи х угловых поправок СА - судно аварийное ТПр - точка прицеливания ИЛС - индекс линии ствола ГН - глаз наблюдателя комплект задатчиков УКМБФ - комплект задатчиков учитываемых кинематических, метеорологических и баллистических факторов 7 28431 блок определения УТППОСОЛВ - блок определения углов текущего пространственного положения оси ствола относительно линии визирования Источники информации 1. Типовые аварийно-спасательные средства кораблей и судов ВМФ. часть I. МО СССР - М.: Воениздат, 1979 г. 2. Оптико-механические приборы - М.: Машиностроение, 1975 г. 3. Гвоздева Н.П., Коркина К.И., Прикладная оптика и оптические измерения - М."Машиностроение, 1976 г. 4. Лазарев Л.П. Оптико-электронные приборы наведения летательных аппаратов. - М.: Машиностроение, 1984 г. 5. Кириллов В.П. Бомбометание. - М: Воениздат МО СССР, 1960 г. 6. Борисюк А.А. Эргономика в приборостроении - Киев: Техніка, 1985 г. 7. Справочник по цифровой вычислительной технике. П/ред. Б.Н. Малиновского. - Киев, Техника, 1974 г. 8. Справочник по аналоговой вычислительной технике. П/р Г.Е. Пухова. - Киев, Техника, 1975 г. Фиг. 1 8 28431 Фиг. 2 9 28431 Фиг. 3 10 28431 Фиг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 34 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 11
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and appliance for aiming barrel throwing appliance that is aimed manually, of line-throwing gun type
Автори англійськоюBorysiuk Anatolii Oleksiiovych
Назва патенту російськоюСпособ и устройство прицеливания ствольной метательной установки, которая наводится вручную, типа линемета
Автори російськоюБорисюк Анатолий Алексеевич
МПК / Мітки
Мітки: типу, прицілювання, спосіб, линемета, вручну, установки, метальної, ствольної, пристрій, наводиться
Код посилання
<a href="https://ua.patents.su/11-28431-sposib-ta-pristrijj-pricilyuvannya-stvolno-metalno-ustanovki-shho-navoditsya-vruchnu-tipu-linemeta.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій прицілювання ствольної метальної установки, що наводиться вручну, типу линемета</a>
Спосіб прицілювання стрілецької зброї

Номер патенту: 12618
Опубліковано: 28.02.1997
Автор: Сенаторов Володимир Миколайович
МПК: F41G 3/16
Мітки: прицілювання, стрілецької, спосіб, зброї
Формула / Реферат:
Способ прицеливания стрелкового оружия, заключающийся в одновременном наблюдении окружающего пространства и изображения прицельной марки, в обнаружении цели в наблюдаемом пространстве и в развороте оси оружия вокруг точки, в которой находится глаз, досовмещения марки с целью, отличающийся тем, что окружающее пространство наблюдают отраженным в светоделителе прицела, а прицельную марку через светоделитель, разместив предварительно ось...
Пристрій для вимірювання лінійних розмірів об’єкту
Номер патенту: 5080
Опубліковано: 28.12.1994
Автори: Гоцалюк Юрій Борисович, Значковський Борис Миколайович, Осецький Юрій Михайлович
МПК: G01B 11/00, G01B 7/02
Мітки: розмірів, пристрій, об'єкту, лінійних, вимірювання
Формула / Реферат:
Устройство для измерения линейных размеров объектов, содержащее выполненные в виде поворотных трансформаторов датчики положения точек поверхности объекта, источник опорного сигнала и схему суммирования со входами, подключенными к выходам датчиков и источника опорного сигнала, отличающееся тем, что, с щелью обеспечения независимости выходного сигнала от количества включенных датчиков и повышения точности измерения, источник опорного...
Спосіб вимірювання кутів установки колес автомобілів і пристрій для його здійснення
Номер патенту: 8368
Опубліковано: 29.03.1996
Автори: Кожохин Володимир Вікторович, Саєнко Володимир Олексійович
МПК: G01M 17/007, G01B 11/26
Мітки: вимірювання, установки, спосіб, здійснення, пристрій, кутів, автомобілів, колес
Формула / Реферат:
1. Способ измерения углов установки колес автомобилей, заключающийся в том, что измеряют углы схождения и развала колее посредством направления коллимированных световых лучей на зеркальные насадки, установленные на контролируемых колесах перпендикулярно осям вращения колес, и регистрируют угловое положение зеркальных насадок по ориентации отраженных световых лучей, отличающийся тем, что перед указанным измерением световые лучи направляют...
Спосіб виготовлення деталей типу відводів і пристрій для його втілення
Номер патенту: 9463
Опубліковано: 30.09.1996
Автори: Павлов Ігор Васільович, Кохан Леонід Тимофійович, Венцьковський Олександр Віталійович
МПК: B21C 37/15
Мітки: спосіб, пристрій, втілення, деталей, типу, виготовлення, відводів
Формула / Реферат:
1. Способ изготовления деталей типа отводов путём выполнения в трубчатой заготовке отверстия, формообразования в зоне, прилегающей к отверстию выступа, формования на его торцовом участке вогнутой поверхности, а также отбортовки отверстия и калибровки детали, отличающийся тем, что, с целью повышения качества получаемых деталей, формообразование выступа осуществляют в две стадии, первую из которых производят одновременно с оформлением на его...
Пристрій для установки трансформаторів на опорах ліній подовжного електропостачання і автоблокіровки
Номер патенту: 17497
Опубліковано: 06.05.1997
Автор: Чеботарьов Григорій Аврамович
МПК: B60M 1/00
Мітки: автоблокіровки, пристрій, ліній, установки, трансформаторів, опорах, електропостачання, подовжнього
Формула / Реферат:
1. Устройство для установки трансформаторов на опорах линий продольного электроснабжения и автоблокировки, содержащее связанные с трансформатором элементы крепления в виде хомутов, охватывающие опоры, и связь высоковольтного ввода трансформатора с линией, отличающееся тем, что оно снабжено двумя спаренными направляющими, защелкой с пружиной, установленной на направляющих, и приводом перемещения трансформатора вдоль направляющих, связанного с...
Попередній патент: Пом’якшувач для гуми
Наступний патент: Спосіб продування рідкого металу і пристрій для його здійснення
Випадковий патент: Спосіб визначення густини рідин