Навігаційна система системи координат сухопутного транспортного засобу (варіанти)
Номер патенту: 84538
Опубліковано: 10.11.2008
Автори: Рекоу Ендрю Карл Вільхельм, Мерсер Дейв, Нельсон Фредерік В., Пікетт Теренс Даніель



Формула / Реферат
1. Навігаційна система сухопутного транспортного засобу, що містить приймач глобальної системи позиціонування для прийому сигналу від глобальної системи позиціонування та генерування навігаційної інформації для сухопутного транспорту, при цьому навігаційна інформація включає позицію та напрям сухопутного транспортного засобу, систему керування навігацією, що з'єднана з приймачем глобальної системи позиціонування для керування транспортним засобом, та компенсаційну систему, що з'єднана з приймачем глобальної системи позиціонування та системою керування навігацією для заміни інформації про позицію та напрям скоректованою інформацією, яка скомпенсована відносно рискання та крену сухопутного транспортного засобу для подачі скоректованої навігаційної інформації у систему керування навігацією, при цьому компенсаційна система містить гіроскоп для вимірювання ступеня рискання сухопутного транспортного засобу, пристрій вимірювання прискорення для вимірювання бічного прискорення сухопутного транспортного засобу, при цьому компенсаційна система виконана з можливістю генерування скоректованої інформації про позицію та напрям за допомогою розрахунку з використанням виміряного ступеня рискання, бічного прискорення, відстані зміщення сухопутного транспортного засобу на основі бічного прискорення, виміряного пристроєм прискорення, та відстані на основі відцентрового прискорення сухопутного транспортного засобу, вимірюваної за допомогою порівняння змін позицій сухопутного транспортного засобу відносно напряму руху сухопутного транспортного засобу, при цьому система керування навігацією виконана з можливістю застосування скоректованої інформації для керування сухопутним транспортним засобом.
2. Навігаційна система за п. 1, яка відрізняється тим, що компенсаційна система виконана з можливістю розраховувати напрям сухопутного транспортного засобу на основі ступеня рискання, виміряного гіроскопом.
3. Навігаційна система за п. 2, яка відрізняється тим, що компенсаційна система виконана з можливістю розраховувати скоректований напрям транспортного засобу з використанням рівняння:
СC= [GR/FMEAS] + [(CGPS - CG).KC/CFR] + Pf,
де СC означає векторну величину скоректованого напряму, GR - ступінь рискання, FMEAS - частоту вимірювання ступеня рискання за допомогою гіроскопа, CGPS - напрям, що визначається на основі навігаційної інформації, створений приймачем глобальної системи позиціонування, СG - напрям, визначений за допомогою гіроскопа, КC - змінну величину фільтра, CFR - змінну розділення фільтра напряму, Pf є величиною, яка проектує скоректований напрям з центра тяжіння сухопутного транспортного засобу на точку, в якій на сухопутному транспортному засобі установлена антена приймача глобальної системи позиціонування.
4. Навігаційна система за п. 1, яка відрізняється тим, що гіроскоп містить єдиний гіроскоп для вимірювання ступеня рискання.
5. Навігаційна система за п. 1, яка відрізняється тим, що компенсаційна система виконана з можливістю визначати бічну відстань зміщення на основі рівняння:
DOT=(HA . A/g) + DHSA,
де DOT означає бічну відстань зміщення сухопутного транспортного засобу, НA - висоту розміщення пристрою вимірювання прискорення над контрольною точкою на сухопутному транспортному засобі, А - бічне прискорення, визначене за допомогою пристрою вимірювання прискорення, g - прискорення сили тяжіння і DHSA - відстань, що отримується на основі вимірюваного відцентрового прискорення.
6. Навігаційна система за п. 1, яка відрізняється тим, що пристрій вимірювання прискорення складається з єдиного пристрою вимірювання прискорення.
7. Навігаційна система за п. 1, яка відрізняється тим, що компенсаційна система може визначати величину схилу нерівної місцевості на основі виміряного бічного прискорення сухопутного транспортного засобу, причому величина схилу додається до скоректованої навігаційної інформації.
8. Навігаційна система за п. 7, яка відрізняється тим, що система керування навігацією використовує величину схилу для визначення ефективної ширини колії робочого пристрою сухопутного транспортного засобу.
9. Навігаційна система за п. 8, яка відрізняється тим, що ефективна ширина (Е) колії визначається на основі рівняння:
Е =І Cos (S),
де Е - ефективна ширина колії, І - ширина смуги робочого пристрою на плоскій місцевості і S - величина схилу.
10. Навігаційна система сухопутного транспортного засобу, що містить приймач глобальної системи позиціонування для прийому сигналу від глобальної системи позиціонування та генерування навігаційної інформації для сухопутного транспорту, при цьому навігаційна інформація включає позицію та напрям сухопутного транспортного засобу, систему керування навігацією, що з'єднана з приймачем глобальної системи позиціонування для керування транспортним засобом, та компенсаційну систему, що з'єднана з приймачем глобальної системи позиціонування та системою керування навігацією для заміни інформації про позицію та напрям скоректованою інформацією, що скомпенсована відносно рискання та крену сухопутного транспортного засобу для подачі скоректованої навігаційної інформації у систему керування навігацією, при цьому компенсаційна система містить гіроскоп для вимірювання ступеня рискання сухопутного транспортного засобу, пристрій вимірювання прискорення для вимірювання бічного прискорення сухопутного транспортного засобу, при цьому компенсаційна система виконана з можливістю генерування скоректованої інформації про позицію та напрям з використанням виміряного ступеня рискання та бічного прискорення на основі рівняння:
СС=[GR/FMEAS] + [(CGPS - CG)]. KC/CFR] + Pf,
де Сс означає векторну величину скоректованого напряму, GR - вимірюваний ступінь рискання, FMEAS - частоту вимірювання ступеня рискання гіроскопом, CGPS - напрям, що визначається на основі навігаційної інформації, переданої приймачем глобальної системи позиціонування, CG - напрям, що визначається компенсаційною системою на основі вимірювання гіроскопом ступеня рискання, КС - змінну величину фільтра, CFR - змінну розділення фільтра напряму, і Pf є величиною, яка проектує скоректований напрям з центра тяжіння сухопутного транспортного засобу на точку, в якій на сухопутному транспортному засобі установлена антена приймача глобальної системи позиціонування, причому система керування навігацією виконана з можливістю застосування скоректованої інформації для керування сухопутним транспортним засобом.
11. Навігаційна система за п. 10, яка відрізняється тим, що гіроскоп складається з єдиного гіроскопа для вимірювання ступеня рискання.
12. Навігаційна система за п. 10, яка відрізняється тим, що компенсаційна система виконана з можливістю визначати бічну відстань зміщення для сухопутного транспортного засобу на основі бічного прискорення, визначеного за допомогою пристрою вимірювання прискорення, та відстані, що отримується на основі вимірюваного відцентрового прискорення, вимірюваної за допомогою порівняння змін позиції сухопутного транспортного засобу відносно напряму руху сухопутного транспортного засобу.
13. Навігаційна система за п. 12, яка відрізняється тим, що компенсаційна система виконана з можливістю визначати бічну відстань зміщення на основі рівняння:
DOT=(HA - A/g) + DHSA,
де DOT означає бічну відстань зміщення сухопутного транспортного засобу, НА - висоту розміщення пристрою вимірювання прискорення над контрольною точкою на сухопутному транспортному засобі, А - бічне прискорення, визначене за допомогою пристрою вимірювання прискорення, g - прискорення сили тяжіння і DHSA - відстань, що отримується на основі вимірюваного відцентрового прискорення.
14. Навігаційна система за п. 10, яка відрізняється тим, що пристрій вимірювання прискорення містить єдиний пристрій вимірювання прискорення.
15. Навігаційна система за п. 10, яка відрізняється тим, що компенсаційна система може визначати величину схилу нерівної місцевості на основі виміряного бічного прискорення сухопутного транспортного засобу, причому величина схилу додається до скоректованої навігаційної інформації.
16. Навігаційна система за п. 15, яка відрізняється тим, що система керування навігацією використовує величину схилу для визначення ефективної ширини колії робочого пристрою сухопутного транспортного засобу.
17. Навігаційна система за п. 16, яка відрізняється тим, що ефективна ширина (Е) колії визначається на основі рівняння:
Е =І Cos (S),
де Е - ефективна ширина колії, І - ширина смуги робочого пристрою на плоскій місцевості і S - величина схилу.
Текст
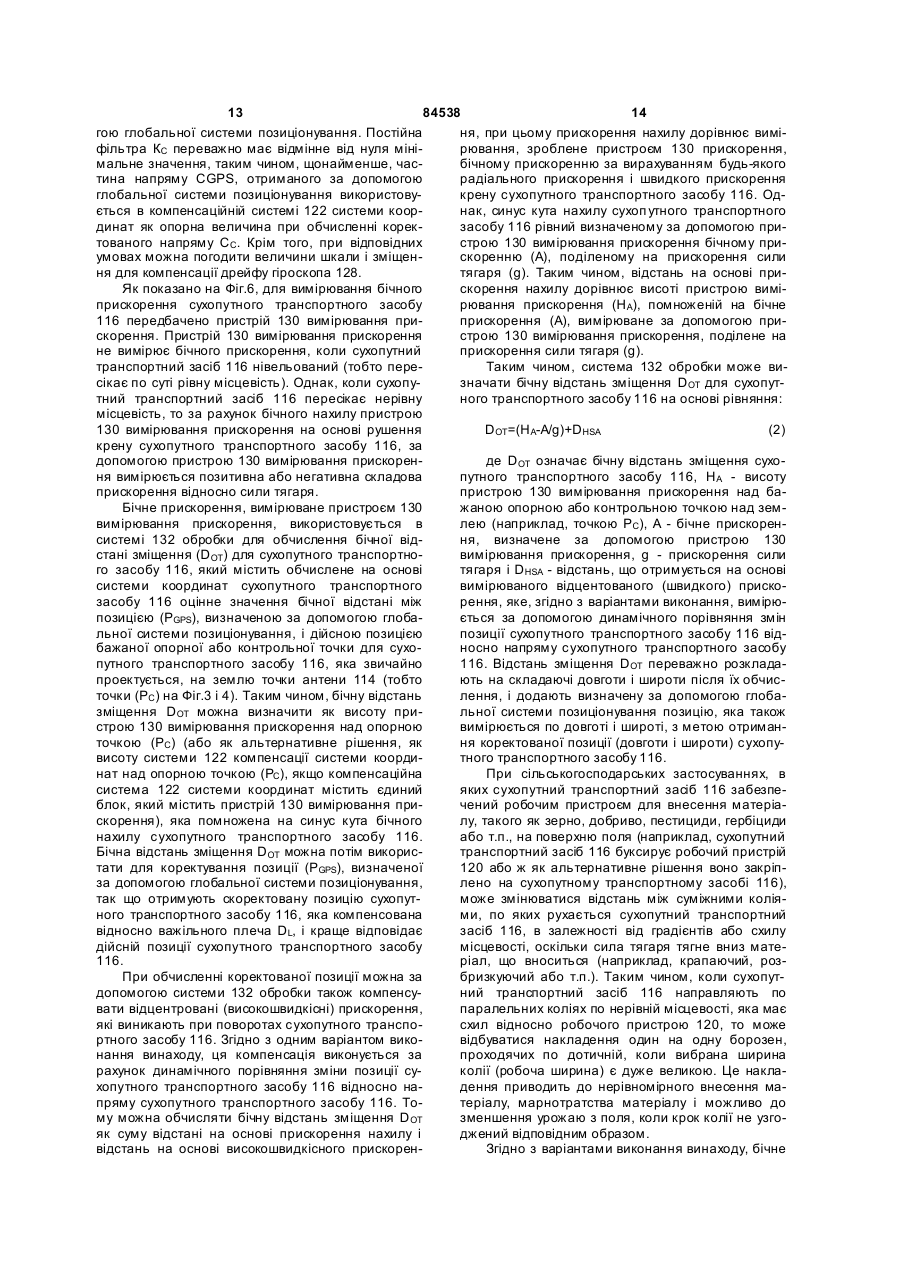
1. Навігаційна система сухоп утного транспортного засобу, що містить приймач глобальної системи позиціонування для прийому сигналу від глобальної системи позиціонування та генерування навігаційної інформації для сухопутного транспорту, при цьому навігаційна інформація включає позицію та напрям сухопутного транспортного засобу, систему керування навігацією, що з'єднана з приймачем глобальної системи позиціонування для керування транспортним засобом, та компенсаційну систему, що з'єднана з приймачем глобальної системи позиціонування та системою керування навігацією для заміни інформації про позицію та напрям скоректованою інформацією, яка скомпенсована відносно рискання та крену сухопутного транспортного засобу для подачі скоректованої навігаційної інформації у систему керування навігацією, при цьому компенсаційна система містить гіроскоп для вимірювання ступеня рискання сухопутного транспортного засобу, пристрій вимірювання прискорення для вимірювання бічного прискорення сухопутного транспортного засобу, при цьому компенсаційна система виконана з можливістю генерування скоректованої інфо 2 (19) 1 3 84538 4 пристрою вимірювання прискорення над контропрям, що визначається компенсаційною системою льною точкою на сухопутному транспортному зана основі вимірювання гіроскопом ступеня рискансобі, А - бічне прискорення, визначене за допомоня, КС - змінну величину фільтра, CFR - змінну гою пристрою вимірювання прискорення, g розділення фільтра напряму, і Pf є величиною, яка прискорення сили тяжіння і DHSA - відстань, що проектує скоректований напрям з центра тяжіння отримується на основі вимірюваного відцентровосухопутного транспортного засобу на точку, в якій го прискорення. на сухопутному транспортному засобі установлена 6. Навігаційна система за п. 1, яка відрізняється антена приймача глобальної системи позиціонутим, що пристрій вимірювання прискорення склавання, причому система керування навігацією видається з єдиного пристрою вимірювання прискоконана з можливістю застосування скоректованої рення. інформації для керування сухопутним транспорт7. Навігаційна система за п. 1, яка відрізняється ним засобом. тим, що компенсаційна система може визначати 11. Навігаційна система за п. 10, яка відрізняєтьвеличину схилу нерівної місцевості на основі виміся тим, що гіроскоп складається з єдиного гіроскоряного бічного прискорення сухопутного транспорпа для вимірювання ступеня рискання. тного засобу, причому величина схилу додається 12. Навігаційна система за п. 10, яка відрізняєтьдо скоректованої навігаційної інформації. ся тим, що компенсаційна система виконана з мо8. Навігаційна система за п. 7, яка відрізняється жливістю визначати бічну відстань зміщення для тим, що система керування навігацією використосухопутного транспортного засобу на основі бічновує величину схилу для визначення ефективної го прискорення, визначеного за допомогою приширини колії робочого пристрою сухопутного строю вимірювання прискорення, та відстані, що транспортного засобу. отримується на основі вимірюваного відцентрово9. Навігаційна система за п. 8, яка відрізняється го прискорення, вимірюваної за допомогою порівтим, що ефективна ширина (Е) колії визначається няння змін позиції сухоп утного транспортного зана основі рівняння: собу відносно напряму руху сухопутного Е =І Cos (S), транспортного засобу. де Е - ефективна ширина колії, І - ширина смуги 13. Навігаційна система за п. 12, яка відрізняєтьробочого пристрою на плоскій місцевості і S - веся тим, що компенсаційна система виконана з моличина схилу. жливістю визначати бічну відстань зміщення на 10. Навігаційна система сухоп утного транспортнооснові рівняння: го засобу, що містить приймач глобальної системи DOT=(HA - A/g) + D HSA , позиціонування для прийому сигналу від глобальде DOT означає бічну відстань зміщення сухоп утноної системи позиціонування та генерування навіго транспортного засобу, НА - висоту розміщення гаційної інформації для сухопутного транспорту, пристрою вимірювання прискорення над контропри цьому навігаційна інформація включає позильною точкою на сухопутному транспортному зацію та напрям сухопутного транспортного засобу, собі, А - бічне прискорення, визначене за допомосистему керування навігацією, що з'єднана з пригою пристрою вимірювання прискорення, g ймачем глобальної системи позиціонування для прискорення сили тяжіння і DHSA - відстань, що керування транспортним засобом, та компенсаційотримується на основі вимірюваного відцентровону систему, що з'єднана з приймачем глобальної го прискорення. системи позиціонування та системою керування 14. Навігаційна система за п. 10, яка відрізняєтьнавігацією для заміни інформації про позицію та ся тим, що пристрій вимірювання прискорення напрям скоректованою інформацією, що скомпенмістить єдиний пристрій вимірювання прискоренсована відносно рискання та крену сухопутного ня. транспортного засобу для подачі скоректованої 15. Навігаційна система за п. 10, яка відрізняєтьнавігаційної інформації у систему керування навіся тим, що компенсаційна система може визначагацією, при цьому компенсаційна система містить ти величину схилу нерівної місцевості на основі гіроскоп для вимірювання ступеня рискання суховиміряного бічного прискорення сухопутного путного транспортного засобу, пристрій вимірютранспортного засобу, причому величина схилу вання прискорення для вимірювання бічного придодається до скоректованої навігаційної інформаскорення сухопутного транспортного засобу, при ції. цьому компенсаційна система виконана з можли16. Навігаційна система за п. 15, яка відрізняєтьвістю генерування скоректованої інформації про ся тим, що система керування навігацією викориспозицію та напрям з використанням виміряного товує величину схилу для визначення ефективної ступеня рискання та бічного прискорення на основі ширини колії робочого пристрою сухопутного рівняння: транспортного засобу. СС=[GR/FMEAS] + [(CGPS - CG)]. KC/CFR] + Pf, 17. Навігаційна система за п. 16, яка відрізняєтьде Сс означає векторну величину скоректованого ся тим, що ефективна ширина (Е) колії визначанапряму, GR - вимірюваний ступінь рискання, ється на основі рівняння: FMEAS - частоту вимірювання ступеня рискання Е =І Cos (S), гіроскопом, CGPS - напрям, що визначається на де Е - ефективна ширина колії, І - ширина смуги основі навігаційної інформації, переданої приймаробочого пристрою на плоскій місцевості і S - вечем глобальної системи позиціонування, CG - наличина схилу. 5 84538 Винахід належить до компенсаційної системи системи координат сухопутного транспортного засобу, при цьому компенсаційна система з'єднана з приймачем системи визначення координат, який виконаний з можливістю подачі в компенсаційну систему системи координат інформації про положення і напрям, що базується на глобальній системі визначення координат, включаючи засоби для вимірювання кута рискання сухоп утного транспортного засобу. Недоліком навігаційних систем, що засновуються на глобальній системі позиціонування (в подальшому GPS), що застосовуються в сухопутних транспортних засобах, є те, що приймач GPS таких систем може визначати лише місце устаткування антени GPS. У більшості сухопутних транспортних засобів місце устаткування антени вибирається таким чином, щоб антена мала вільний напрям в небо і тим самим до супутників GPS. Ця позиція, на жаль, як правило, не є бажаною точкою відліку (наприклад, зчепленням трактора, віссю сухопутного транспортного засобу, точкою під зчепленням трактора або т.п.). Тому визначені з допомогою GPS позиція і напрям рушення сухопутного транспортного засобу є неправильними, якщо транспортний засіб пересікає нерівну місцевість (таку як місцевість з схилом, горбами, улоговинами і т.п.), що може приводити до проїзду декілька разів по одній смузі або до помилок в напрямі. Для розрахунку позиції бажаної точки відліку, необхідно виконувати точне вимірювання просторової орієнтації (вирівнювання) сухопутного транспортного засобу відносно системи координат, в якій здійснюється навігація. Вихідною ідеєю для вимірювання вирівнювання сухопутного транспортного засобу [диивись EP 0845198 А] є устаткування на транспортному засобі кількох антен для GPS в фіксованому, відомому положенні. Коли здійснюються точні вимірювання з допомогою GPS, можна використати відносні положення антен, що визначаються в одному циклі сканування навігаційної системи, для обчислення орієнтації (позиції, вирівнювання і напряму рушення) усього сухопутного транспортного засобу. Навігаційна система, працююча відповідно до цієї ви хідної ідеї, вимагала б декількох приймачів GPS і тому була б занадто дорогою. Як альтернативне рішення, можна застосовувати інерціальну систему в комбінації з GPS [дивись US 6445983 В]. При цій вихідній ідеї інерціальна система визначає первинну інформацію про позицію і напрям для здійснення рушення або керування сухопутним транспортним засобом. Потім використовується інформація, що постачається від GPS, для того щоб коректувати відхилення первинної інформації про позицію і напрям. Інерціальні системи містять гіроскопи для вимірювання кута крену, кута рискання і кута нахилу і можуть мати вимірювач прискорення для поліпшення точності інформації, що вимірюється гіроскопами. Такі інерціальні системи повинні працювати відносно точно і тому є занадто дорогими для багатьох застосувань, так само як системи з декількома антенами. Крім того, було запропоновано [US 5987371 A, 6 US 6345231 В] визначати в сухопутних транспортних засобах позицію опорної точки в залежності від позиції антени GPS і матриці перерахунку, в яку входять боковий нахил транспортного засобу і/або нахил транспортного засобу в напрямі рушення і орієнтація транспортного засобу в горизонтальній площині навколо вертикальної осі повороту (кут рискання). Три вказаних величини вимірюють за допомогою відповідних датчиків, наприклад, компаса для кута рискання і вимірювачів нахилу для нахилів. Якщо повинно виконуватися автоматичне керування, то кут напряму визначають на основі відхилень опорної точки і вирівнювання транспортного засобу відносно заданого шляху. У цьому випадку виконується додаткова оцінка лише інформації про позицію антени GPS, в той час як інформацію про напрям виводять з сигналів датчиків. У іншій навігаційній системі [дивись US 6236916 В] позицію і напрям сухоп утного транспортного засобу визначають за допомогою антени GPS. Боковий кут нахилу (кут крену) вимірюють за допомогою датчика і використовують для коректування позиції, визначеного за допомогою антени GPS. Є також окремий датчик для напряму рушення, сигнали якого подаються в систему автоматичного керування для забезпечення стійкого керування. У цьому випадку інформація про позицію і напрям, та, що надходить від антени GPS, коректується за допомогою вимірюваного кута крену. Визначення напряму за допомогою сигналів GPS можливе лише тоді, коли транспортний засіб перебуває в р ушенні. Задача, що покладена в основу винаходу складається в створенні навігаційної системи, в якої з допомогою інерціальної системи забезпечується поліпшення глобальної системи визначення координат, що отримується з приймача навігаційної інформації, такої як позиція, напрям і відстань між коліями, для запобігання погрішностей, які обумовлюються зміною орієнтації сухопутного транспортного засобу (наприклад, креном і рисканням) на нерівній місцевості, яка однак не потребує цілковитої точності гіроскопів і вимірювачів прискорення звичайних інерціальних систем. Ця задача вирішується, згідно з винаходом, за допомогою ознак пунктів 1 і 12 формули винаходу, при цьому в інши х пункта х формули винаходу приведені ознаки, які переважно модифікують рішення. Даний винахід належить до компенсаційної системи системи координат для сухопутного транспортного засобу, зокрема, сільськогосподарського транспортного засобу, такого як трактор, зернозбиральний комбайн, зрошувач, бавовнозбиральна машина або т.п. Компенсаційна система системи координат виконує компенсацію інформації, що отримується з глобальної системи позиціонування, такої як позиція, напрям, крок колії і т.п., з метою компенсації погрішностей, які обумовлюються змінами орієнтації сухопутного транспортного засобу на нерівній місцевості. Таким чином, підвищується точність визначення положення без непотрібних витрат. Компенсаційна система системи координат 7 84538 8 з'єднана з приймачем глобальної системи позицісація інформації про позицію і напрям відносно онування, який приймає позиційний сигнал глобакута крену і кута рискання, коли сухопутний трансльної системи позиціонування (як правило, супутпортний засіб пересікає, нерівну місцевість. никової), і отримує з нього навігаційну інформацію, На Фіг.1 і 2 показаний приклад виконання навівключаючи позицію (наприклад, довготу і широту) і гаційної системи 100, згідно з винаходом, яка занапрям сухопутного транспортного засобу. Інфорснована на глобальній системі позиціонування. мацію про напрям можна отримувати з прийнятих Навігаційна система 100 забезпечує засновану на сигналів на основі ефекту Доплера або ж з двох глобальній системі позиціонування навігацію і/або послідовно певних позицій. Компенсаційна систекерування сухопутним транспортним засобом 116 ма системи координат замінює визначені прийма(дивись Фіг.3), зокрема, сільськогосподарським чем системи визначення координат позицію і насухопутним транспортним засобом, таким як зерпрям скоректованою позицією і скоректованим нозбиральний комбайн, зрошувач, бавовнозбиранапрямом, які скоректовані відносно кута рискання льнамашина, польовий здрібнювач або т.п., коли і переважно також кута крену транспортного засосухопутний транспортний засіб 116 рухається по бу з метою отримання скоректованої навігаційної дорозі або по борозні в полі. У навігаційній системі інформації, яка може служити для навігації або 100 можна використати компенсацію системи коавтоматичного керування сухопутним транспортординат для коректування отриманих з глобальної ним засобом. системи позиціонування навігаційних параметрів, Крім того, компенсаційна система системи котаких як позиція (тобто довгота і широта) і напрям, ординат може визначати схил нерівної місцевості. відносно погрішностей, які обумовлюються змінаВеличину схилу можна використати для визначенми орієнтації сухопутного транспортного засобу ня ефективної ширини, колії з'єднаного з сухопут116 (тобто креном і рисканням сухопутного трансним транспортним засобом (наприклад, що буксипортного засобу 116), коли воно рухається по нерується або укріпленого на ньому) робочого рівній місцевості. Навігаційна система 100 може пристрою. бути також виконана з можливістю визначення Нижче приводиться докладний опис прикладу ефективного кроку колії сухопутного транспортновиконання, представленого на кресленнях, на яких го засобу 116 або робочого пристрою, що буксирузображено: ється ним за рахунок вимірювання схилу місцевоФіг.1 - збільшена блок-схема навігаційної сиссті, що пересікається сухоп утним транспортним теми, згідно з винаходом; засобом. Фіг.2 - докладна блок-схема навігаційної сисПоказаний на Фіг.1 варіант виконання містить теми, згідно з винаходом, яка заснована на принавігаційну систему 100, приймач 102 глобальної ймачі глобальної системи позиціонування і взаєсистеми позиціонування і систему 104 керування модіє з компенсаційною системою системи навігацією, які сполучені один з одним системою координат; 106 шин. Приймач 102 глобальної системи позиціФіг.3 - сухопутний транспортний засіб, який онування приймає позиційні сигнали глобальної пересікає нерівну місцевість і в якому використосистеми позиціонування і створює засновану на вується навігаційна система, згідно з винаходом, глобальній системі позиціонування навігаційну на вигляді збоку; інформацію, включаючи позицію (тобто довготу і Фіг.4 - сухопутний транспортний засіб, показашироту), напрям, швидкість, час і т.п., для застоний на Фіг.3, з додатковою ілюстрацією діяння кута сування в системі 104 керування навігацією і в крену сухопутного транспортного засобу на його інших компонентах навігаційної системи 100. Згідпозицію, на виді спереду; но з прикладами виконання, приймач 102 глобальФіг.5 - сухопутний транспортний засіб, показаної системи позиціонування приймає позиційні ний на Фіг.3, з додатковою ілюстрацією діяння кута сигнали глобальної системи позиціонування рискання сухоп утного транспортного засобу на (GPS), космічної системи радіонавігації, яка розгонапрям його рушення, на виді зверху; рнена ВПС США для уряду США. Слід, однак, заФіг.6 - блок-схема компенсаційної системи сизначити, що приймач 102 глобальної системи постеми координат показаної на Фіг.2 навігаційної зиціонування як альтернативне рішення або системи; додатково до цього, може бути виконаний з можФіг.7 - сухопутний транспортний засіб, показаливістю застосування з іншими радіонавігаційниний на Фіг.3, з додатковою ілюстрацією діяння ми, відповідно, глобальними системами позиціосхилу місцевості, що пересікається сухопутним нування, такими як розгорнена російською транспортним засобом на ефективну робочу шикосмічною організацією для Російської Федерації рину робочого пристрою, що буксирується сухопусуп утникова навігаційна система Глонас або майтним транспортним засобом, на виді зверху; бутня європейська система Галілей. Згідно з варіФіг.8 - схема взаємозв'язку між ефективною антами виконання винаходу, приймач 102 глобаробочою шириною сухопутного транспортного зальної системи позиціонування може бути також собу або робочого пристрою, що буксирується ним виконаний з можливістю прийому і використання і схилом місцевості, що пересікається сухопутним поліпшеної позиційної інформації, яку поставлятранспортним засобом; ють диференціальні глобальні системи позиціонуФіг.9 - графічна схема засобу для поліпшення вання і поверхневі диференціальні глобальні сисінформації про позицію і напрям, заснованого на теми позиціонування (WADGPS), такі як глобальній системі позиціонування і сухопутного розроблена фірмою Deere & Соmраnу of Moline, транспортного засобу, що застосовується в навіІллінойс, США система Starfire-WDGPS або ствогаційній системі, при цьому відбувається компенрена федеральним керуванням авіації уряду США 9 84538 10 розширена глобальна система (WAAS). У таких напрям на супутники глобальної системи позиціоваріантах виконання приймач 102 глобальної сиснування. Точка РА, в якій розташована антена 114, теми позиціонування може містити радіоприймач віддалена від бажаної точки РС відліку або контродля прийому диференціальної інформації корекції льної точки сухопутного транспортного засобу 116 погрішностей, або ж може бути з'єднаний з ним. і робочого пристрою 120, що буксирується ним Система 104 керування навігацією використо(наприклад, точки на грунті 118 під сухопутним вує навігаційну інформацію, що видається притранспортним засобом 116) на відстань, яка звиймачем 102 глобальної системи позиціонування чайно називається в рівні техніки важільним пледля видачі оператору сухопутного транспортного чем (DL) і має по суті вертикальну складаючу D LZ засобу 116 інформації навігації або керування. важільного плеча і по суті горизонтальні складаючі Система 104 керування навігацією додатково виDLX і DLY важільного плеча. Таким чином, показана користовує інформацію для керування пристроями на Фіг.1 система 104 керування навігацією забез108 стернового керування, які направляють сухопечує високоточну навігацію або керування сухопутний транспортний засіб 116 вздовж бажаного путним транспортним засобом 116 при по суті шляху або по бажаній колії, якщо використовуєтьплоскої місцевості, оскільки горизонтальні і вертися автоматичне керування. Наприклад, навігаційна кальні складаючі DLX, DLY, DLZ важільного плеча система 104 в сільськогосподарських варіантах залишаються постійними відносно один одного. виконання винаходу (в яких навігаційна система Однак, коли пересікається нерівна місцевість (на104 використовується в сільськогосподарських приклад, місцевість з схилом, горбами, улоговитранспортних засобах, таких як трактори, зернонами, борознами, пагорками або т.п.), то горизонзбиральні комбайни, зрошувач, бавовнозбиральна тальні і вертикальні складаючі DLX, DLY, DLZ машини або т.п.) може бути виконана з можливісважільного плеча змінюються відносно один однотю здійснення навігації і, не обов'язково, напряму го, коли сухопутний транспортний засіб крениться сухопутного транспортного засобу 116 вздовж по (нахиляється убік, що називається також бортовим суті паралельних шляхів або борозен в полі, з мекачанням) і рискає (повертається в горизонтальній тою виконання в полі обробки грунту, внесення площині навколо вертикальної осі). Відповідно до хімікалій, такого як гербіциди або пестициди для цього, визначені за допомогою глобальної системи рослин, які ростуть на полі, зняття урожаю рослин позиціонування позиція і напрям сухопутного і т.п. Ці борозни переважно мають ширину (W), яка транспортного засобу 116 є неправильними, що відповідає ширині робочого пристрою 120, що приводить до показаної на Фіг.4 поперечної погріприводиться в рух сухопутним транспортним засошності (DOT) колії і/або до показаної на Фіг.5 погрібом 116, і знаходяться на такій відстані один від шності (ЕС) напряму. одного, що вони проходять по суті паралельно і по Для компенсації цих погрішностей і для забездотичній один до одного для виключення огріхів печення тим самим можливості більш точного кеабо подвійних проходів при обробці поля. рування сухоп утним транспортним засобом 116 на У варіанті виконання навігаційної системи 100, нерівній місцевості, даний винахід пропонує компри якому забезпечується автоматичне керування, пенсаційну систему 122 системи координат, яка датчик 110 кута стернового керування постачає в вводиться між приймачем 102 глобальної системи систему 104 керування навігацією сигнали зворотпозиціонування і системою 104 керування навіганого зв'язку, які відображають дійсний кут, який цією, як показано на Фіг.2. Компенсаційна система заданий пристроями 108 стернового керування, з 122 систему координат вимірює крен і рискання метою забезпечення керування за допомогою сиссухопутного транспортного засобу 116 (дивись теми 104 керування навігацією вибраного шляху Фіг.3-5) для компенсації погрішностей в інформації або борозни, шляхом керування дійсного заданого про позицію і напрям, глобальної системи позиціонапряму від датчика 110 кута стернового керуваннування, що поставляється приймачем 102, коли ня з позицією і напрямом, що видаються приймасухопутний транспортний засіб 116 пересікає нерічем 102 глобальної системи позиціонування. Згідвну місцевість. У показаному на Фіг.2 варіанті вино з прикладами виконання, може бути також конання, компенсаційна система 122 системи копередбачений датчик 112 надмірного повороту ординат з'єднана з приймачем глобальної системи стернового керування. Датчик 112 надмірного попозиціонування через виділену окрему (що виковороту стернового колеса вимірює рушення стерристовується виключно для цієї мети) шину 124. нового колеса сухопутного транспортного засобу Компенсаційна система 122 системи координат 116 оператором для забезпечення оператору сувитягує інформацію про позицію (наприклад, довхопутного транспортного засобу 116 можливості готу і широту) і інформацію про напрям з глобальручної корекції автоматичних функцій керування, ної системи позиціонування, що створюється прищо поставляються системою 104 керування навіймачем 102 навігаційної інформації і замінює цю гацією. Таким чином, оператор може виконувати інформацію скоректованою інформацією про покоректування напряму або здійснювати ручне кезицію (наприклад, довготу і широту) і інформацією рування сухопутним транспортним засобом 116 про напрям, яка скоректована відносно погрішносдля об'їзду перешкоди на своєму шля ху. тей, що спричиняє крен і рискання сухопутного Як показано на Фіг.3, приймач 102 глобальної транспортного засобу (наприклад, що спричиняє системи позиціонування, яка зображена на Фіг.1 бічні нахили, горби і т.д.), перш ніж інформація навігаційної системи 100 містить антену 114 для через системну шину 126 передається в навігаційглобальної системи позиціонування, яка закріплену систему 110. Вся інша інформація, що поставна на сухопутному транспортному засобі в точці ляється приймачем 102 глобальної системи позиРА, яка забезпечує вільний огляд неба і тим самим ціонування (наприклад, про швидкість, час і т.п.) 11 84538 12 компенсаційна система 122 системи координат кання сухопутного транспортного засобу 116. Випередає з окремої шини 124 без змін в системну мірюваний ступінь рискання використовується в шину 126. Крім того, компенсаційна система 122 системі 132 обробки для визначення істинного системи координат може виконувати вимірювання напряму транспортного засобу (тобто гіроскопічносхилу, які через системну шину 126 передаються в го напряму), що компенсує погрішності напряму, навігаційну систему 110 з скоректованою інфорвизначеного за допомогою глобальної системи мацією про позицію і напрям, оскільки відстань між позиціонування, які зумовлені рисканням і креном. суміжними перетинами для робочого пристрою Напрям, що поставляється приймачем 102 глоба120 можуть змінюватися в залежності від схилу. льної системи позиціонування, застосовується для Таким чином, можна задавати скомпенсовану на обмеження дрейфу гіроскопа 128. Напрям, що схил ширину колії, відповідно, робочий крок для визначається за допомогою глобальної системи сухопутного транспортного засобу 116 або для позиціонування можна використати також для каробочого пристрою, що буксирується ним. лібрування положення спокою і калібрування шкаЗгідно з варіантами виконання, що поставляли гіроскопа 128 під час роботи компенсаційної ється компенсаційною системою 122 системи косистеми 122 системи координат. Оскільки напрям, ординат компенсована відносно системи коордивимірюваний за допомогою гіроскопа 128, ефектинат навігаційна інформація має формат, який вно постачає величину вимірювання напряму, яка ідентичний з форматом глобальної системи позиспостерігається в центрі тягаря (наприклад, на ціонування, що поставляється приймачем 102 назадній осі трактора або т.п.) сухопутного транспорвігаційної інформації. Тому компенсовану відносно тного засобу 116, то гіроскопічний напрям проексистеми координат навігаційну інформацію, вклютується на точку на сухопутному транспортному чаючи компенсовану відносно системи координат засобі 116, в якій установлена антена 114 приймаінформацію про позицію і напрям з компенсаційної ча 102 глобальної системи позиціонування (наприсистеми 122 системи координат, разом з не комклад, точку РА сухопутного транспортного засобу пенсованою інформацією, такою як швидкість, час 116 на Фіг.3), для отримання скоректованого наі т.п., яка постачається приймачем 102 глобальної пряму, який співпадає з напрямом, що витягується системи позиціонування і передається компенсаз інформації про напрям, що поставляється приційною системою 122 системи координат в систеймачем глобальної системи позиціонування 102. мну шину 126, можна використати в системі 104 Потім скоректований напрям подається через сискерування навігацією без додаткової модифікації темну шину 126 в систему 104 керування навігаціабо форматування, з метою постачання оператору єю. навігаційної інформації і, не обов'язково, керуванСистема 132 обробки компенсаційної системи ня сухопутним транспортним засобом 116 без мо122 системи координат переважно визначає скодифікації інформації. Таким чином, компенсаційну ректований напрям з використанням рівняння: систему 122 системи координат можна додавати до навігаційної системи 100 без зміни існуючих CC=[GR/FMEAS ]+[(CGPS-CG).КC/CFR]+Pf (1) компонентів навігаційної системи 100, таких як приймач 102 глобальної системи позиціонування де CC означає скоректований напрям, GR або система 104 керування навігацією. ступінь рискання, FMEAS - частоту вимірювання стуНа Фіг.6 показана компенсаційна система 122 пеня рискання за допомогою гіроскопа 128, CGPS системи координат показаної на Фіг.2 навігаційної напрям, що визначається на основі навігаційної системи 100. Компенсаційна система 122 системи інформації, створений приймачем 102 глобальної координат містить гіроскоп 128 для вимірювання системи позиціонування, CG - напрям, визначений кута рискання сухопутного транспортного засобу за допомогою гіроскопа 128, CFR - змінна дозволу 116 (дивись Фіг.3), пристрій 130 для вимірювання фільтра напряму, КС - змінна величина фільтра, прискорень (акселерометр) для вимірювання кута при цьому CFR>КС>позитивної мінімальної великрену сухоп утного транспортного засобу 116, коли чини, і Pf є величиною, яка проектує скоректовавоно пересікає нерівну місцевість, і систему 132 ний напрям з центра тягаря сухопутного транспоробробки, яка з'єднана з гіроскопом 128 і пристроєм тного засобу 116 на точку, в якій на сухопутному 130 вимірювання прискорення, для створення інтранспортному засобі установлена антена 114 формації про позицію і напрям сухоп утного трансприймача 102 глобальної системи позиціонування. портного засобу 116. Як показано на Фіг.6, систеЯк випливає з рівняння (1) з урахуванням ма 132 обробки може мати процесор 134 для Фіг.5, згодом гіроскопічний напрям CG стає перездійснення обчислень позиції і напряму, контроважаючим в порівнянні з напрямом CGPS, вимірюлювання зв'язку з іншими компонентами навігаційваним за допомогою глобальної системи позиціоної системи 100 (дивись Фіг.1 і 2), виконання діагнування. Для великих розходжень між напрямом ностики погрішностей і т.п., а також пам'ять, таку CQPS, вимірюваним за допомогою глобальної сисяк EEPROM (постійна пам'ять, що програмується теми позиціонування і гіроскопічним напрямом CG, та електрично стирається) 136, флеш-пам'ять 138 змінну фільтра КС встановлюють рівною змінною і оперативна пам'ять 140, для зберігання програмCFR дозволу фільтра напряму, що вирівнює гіроного забезпечення і/або апаратурне забезпечення скопічний напрям CG з дійсним напрямом CGPS для системи 132 обробки і параметри, які викорисотриманим за допомогою глобальної системи потовуються в системі 132 обробки для обчислення зиціонування. Потім величину змінної фільтра КС скоректованих позицій і напряму. згодом зменшують до мінімальної величини, що Згідно з варіантами виконання винаходу, гірозабезпечує перевагу гіроскопічного напряму CG скоп 128 містить дзигу, яка вимірює ступінь риснад напрямом CGPS, що визначається за допомо 13 84538 14 гою глобальної системи позиціонування. Постійна ня, при цьому прискорення нахилу дорівнює виміфільтра КС переважно має відмінне від нуля мінірювання, зроблене пристроєм 130 прискорення, мальне значення, таким чином, щонайменше, часбічному прискоренню за вирахуванням будь-якого тина напряму CGPS, отриманого за допомогою радіального прискорення і швидкого прискорення глобальної системи позиціонування використовукрену сухопутного транспортного засобу 116. Одється в компенсаційній системі 122 системи коорнак, синус кута нахилу сухоп утного транспортного динат як опорна величина при обчисленні корекзасобу 116 рівний визначеному за допомогою притованого напряму СС. Крім того, при відповідних строю 130 вимірювання прискорення бічному приумовах можна погодити величини шкали і зміщенскоренню (А), поділеному на прискорення сили ня для компенсації дрейфу гіроскопа 128. тягаря (g). Таким чином, відстань на основі приЯк показано на Фіг.6, для вимірювання бічного скорення нахилу дорівнює висоті пристрою виміприскорення сухопутного транспортного засобу рювання прискорення (НА), помноженій на бічне 116 передбачено пристрій 130 вимірювання приприскорення (А), вимірюване за допомогою прискорення. Пристрій 130 вимірювання прискорення строю 130 вимірювання прискорення, поділене на не вимірює бічного прискорення, коли сухопутний прискорення сили тягаря (g). транспортний засіб 116 нівельований (тобто переТаким чином, система 132 обробки може висікає по суті рівну місцевість). Однак, коли сухопузначати бічну відстань зміщення DОT для сухопуттний транспортний засіб 116 пересікає нерівну ного транспортного засобу 116 на основі рівняння: місцевість, то за рахунок бічного нахилу пристрою 130 вимірювання прискорення на основі рушення DОТ=(HA-A/g)+DHSA (2) крену сухопутного транспортного засобу 116, за допомогою пристрою 130 вимірювання прискоренде DОТ означає бічну відстань зміщення сухоня вимірюється позитивна або негативна складова путного транспортного засобу 116, НА - висоту прискорення відносно сили тягаря. пристрою 130 вимірювання прискорення над баБічне прискорення, вимірюване пристроєм 130 жаною опорною або контрольною точкою над земвимірювання прискорення, використовується в лею (наприклад, точкою РС), А - бічне прискоренсистемі 132 обробки для обчислення бічної відня, визначене за допомогою пристрою 130 стані зміщення (DOT) для сухопутного транспортновимірювання прискорення, g - прискорення сили го засобу 116, який містить обчислене на основі тягаря і DHSA - відстань, що отримується на основі системи координат сухопутного транспортного вимірюваного відцентованого (швидкого) прискозасобу 116 оцінне значення бічної відстані між рення, яке, згідно з варіантами виконання, вимірюпозицією (PGPS), визначеною за допомогою глобається за допомогою динамічного порівняння змін льної системи позиціонування, і дійсною позицією позиції сухопутного транспортного засобу 116 відбажаної опорної або контрольної точки для сухоносно напряму сухопутного транспортного засобу путного транспортного засобу 116, яка звичайно 116. Відстань зміщення DOT переважно розкладапроектується, на землю точки антени 114 (тобто ють на складаючі довготи і широти після їх обчисточки (РС) на Фіг.3 і 4). Таким чином, бічну відстань лення, і додають визначену за допомогою глобазміщення DОT можна визначити як висоту прильної системи позиціонування позицію, яка також строю 130 вимірювання прискорення над опорною вимірюється по довготі і широті, з метою отриманточкою (PC) (або як альтернативне рішення, як ня коректованої позиції (довготи і широти) сухопувисоту системи 122 компенсації системи коордитного транспортного засобу 116. нат над опорною точкою (РС), якщо компенсаційна При сільськогосподарських застосуваннях, в система 122 системи координат містить єдиний яких сухопутний транспортний засіб 116 забезпеблок, який містить пристрій 130 вимірювання причений робочим пристроєм для внесення матеріаскорення), яка помножена на синус кута бічного лу, такого як зерно, добриво, пестициди, гербіциди нахилу сухопутного транспортного засобу 116. або т.п., на поверхню поля (наприклад, сухопутний Бічна відстань зміщення DОT можна потім використранспортний засіб 116 буксирує робочий пристрій тати для коректування позиції (PGPS), визначеної 120 або ж як альтернативне рішення воно закріпза допомогою глобальної системи позиціонування, лено на сухопутному транспортному засобі 116), так що отримують скоректовану позицію сухопутможе змінюватися відстань між суміжними коліяного транспортного засобу 116, яка компенсована ми, по яких рухається сухопутний транспортний відносно важільного плеча DL, і краще відповідає засіб 116, в залежності від градієнтів або схилу дійсній позиції сухопутного транспортного засобу місцевості, оскільки сила тягаря тягне вниз мате116. ріал, що вноситься (наприклад, крапаючий, розПри обчисленні коректованої позиції можна за бризкуючий або т.п.). Таким чином, коли сухопутдопомогою системи 132 обробки також компенсуний транспортний засіб 116 направляють по вати відцентровані (високошвидкісні) прискорення, паралельних коліях по нерівній місцевості, яка має які виникають при поворотах сухопутного транспосхил відносно робочого пристрою 120, то може ртного засобу 116. Згідно з одним варіантом виковідбуватися накладення один на одну борозен, нання винаходу, ця компенсація виконується за проходячих по дотичній, коли вибрана ширина рахунок динамічного порівняння зміни позиції суколії (робоча ширина) є дуже великою. Це наклахопутного транспортного засобу 116 відносно надення приводить до нерівномірного внесення мапряму сухопутного транспортного засобу 116. Тотеріалу, марнотратства матеріалу і можливо до му можна обчисляти бічну відстань зміщення D OT зменшення урожаю з поля, коли крок колії не узгояк суму відстані на основі прискорення нахилу і джений відповідним образом. відстань на основі високошвидкісного прискоренЗгідно з варіантами виконання винаходу, бічне 15 84538 16 прискорення, яке вимірюється пристроєм 130 викоординат може бути виконана з можливістю іденмірювання прискорення, можна також використати тифікації кута крену сухоп утного транспортного в системі 132 обробки для визначення кута крену засобу 116, рівного нулю (0°). Це калібрування сухопутного транспортного засобу 116, на основі можна виконувати кожний раз, коли компенсаційна якого можна визначати схил (S) місцевості, що система 122 системи координат встановлюється в пересікається сухоп утним транспортним засобом навігаційну систему 104 сухоп утного транспортно116. Потім схил (S) можна використати в системі го засобу 116. Оператор сухопутного транспортно104 керування навігацією для визначення ефектиго засобу 116 може виконувати це калібрування вної ширини колії або робочої ширини робочого вручн у за рахунок установки сухопутного транспопристрою 120. Таким чином, для робочого приртного засобу 116 в нерухоме рівне положення і строю 120 в реальному часі визначається компенповідомлення в систему 132 обробки, що сухопутсована відносно схилу робоча ширина і крок колії, ний транспортний засіб стоїть нерухомо і рівно коли схил місцевості, що пересікається робочим (наприклад, за допомогою передбачених в навігапристроєм 120 збільшується або зменшується. ційній системі 104 елементів введення). Як альтеНа Фіг.7 і 8 показано діяння схилу (S) місцеворнативне рішення, оператор може виконувати касті, що пересікається сухоп утним транспортним лібрування кута крену в н уль градусів за рахунок засобом 116 на ефективну ширину смуги (E), що поїздки сухоп утного транспортного засобу 116 по буксирується сухопутним транспортним засобом прямому шляху взад і вперед, що забезпечує ком116 робочого пристрою 120. Як показано на Фіг.7, пенсаційній системі 122 системи координат можефективна ширина колії (E) зменшується, коли ливість визначення кута крену в нуль градусів за боковий схил або боковий градієнт місцевості, що рахунок порівняння величин кута крену, що виміпересікається сухоп утним транспортним засобом рюються в різних точках вздовж проробленого 116 збільшується. Ефективна ширина (E1) колії, по шляху. якій слідує сухопутний транспортний засіб 116 при Оскільки компенсаційна система 122 системи перетині місцевості з бічним схилом, буде більше координат створює не саму інформацію про позиефективної ширини (E2) колії, яку залишає сухопуцію і напрям, а замість цього застосовує інерційні тний транспортний засіб 116 на місцевості з лише вимірювання з метою поліпшення глобальної сисневеликим схилом або без схилу. Таким чином, як теми позиціонування, що поставляється приймапоказано на Фіг.8, ефективна ширина (E) колії рочем 102 інформації про позицію і напрям, то добочого пристрою знаходиться при заданому схилі сить, щоб гіроскоп 128 і пристрій 130 вимірювання (S) з ефективною шириною колії робочого приприскорення містили лише відповідний єдиний строю 120 в наступному співвідношенні: пристрій 130 вимірювання прискорення для вимірювання бічного прискорення сухопутного трансE=ICos(S) (3) портного засобу 116 і єдиний гіроскоп 128 для вимірювання ступеню рискання сухопутного де E є ефективною шириною колії, І - ширина транспортного засобу 116. Тому компенсаційна смуги робочого пристрою на плоскій місцевості і S система 122 системи координат, згідно з винахо- схил. дом, не потребує повної кількості гіроскопів і приЗгідно з прикладами виконання винаходу, сисстроїв вимірювання прискорення, яке звичайно тему 122 компенсації системи координат можна необхідне у відомих інерційних системах. Тому калібрувати перед і під час використання для підкомпенсаційна система 122 системи координат є вищення точності визначення коректованих позибільш простій, містить менше компонентів і є цій і напряму. Наприклад, пристрій 130 вимірюбільш дешевою у виготовленні ніж відомі системи. вання прискорення може мати один або більше Однак, потрібно зазначити, що компенсаційна сисдатчиків температури для вимірювання температема 122 системи координат може містити додаттури пристрою 130 вимірювання прискорення, за кові гіроскопи як надмірність або для забезпечення рахунок чого можна за допомогою системи 132 більш точного вимірювання ступеню рискання і обробки компенсувати коливання бічного прискобічного прискорення. рення, що вимірюється пристроєм 130, які обумоНа Фіг.9 показана схема 200 прикладу виковлюються викликаними температурою погрішністю нання способу, за допомогою якого можна поліпзміщення і погрішністю чутливості пристрою 130 шити інформацію про позицію і напрям, що засновимірювання прискорення. Для калібрування реавується на глобальній системі позиціонування, яка кції пристрою 130 вимірювання прискорення на використовується в навігаційній системі 110 сухотемпературу, можна провести калібрування компутного транспортного засобу 116, при цьому інпенсаційної системи 122 системи координат при формацію про позицію і напрям компенсують за відомих умовах (наприклад, при виготовленні) для допомогою інерційних вимірювань відносно руприведення у відповідність вихідної величини датшення рискання і крену транспортного засобу, чика температури з дійсною температурою навкоколи транспортний засіб пересікає нерівну місцелишнього середовища, і вимірювання погрішності вість. Як показано на Фіг.9, на стадії 202 приймазміщення в діапазоні температур. Система 132 ють сигнали глобальної системи позиціонування з обробки може зберігати дане калібрування в паприймача глобальної системи позиціонування і м'яті (наприклад, у флеш-пам'яті 138) з метою завикористовують їх на стадії 204 для створення безпечення можливості виконання коректування навігаційної інформації, заснованої на глобальній при вимірюванні кута крену в залежності від темсистемі позиціонування, включаючи позицію (наператури пристрою 130 вимірювання прискорення. приклад, довготу і широту), напрям або орієнтацію, Крім того, компенсаційна система 122 системи швидкість, час і т.п. На стадії 206 вимірюють також 17 84538 18 ступінь рискання і бічне прискорення сухопутного для визначення на стадії 216 ефективної ширини транспортного засобу 116 із застосуванням гіроколії або крок колії робочого пристрою, що буксископа і пристрою вимірювання прискорення. Потім рується сухопутним транспортним засобом 116 на стадії 208 можна обчислити для сухопутного робочого пристрою 120. Ефективну ширину колії, транспортного засобу 116 коректовану позицію і визначену на стадії 216 можна потім використати напрям, які компенсовані відносно крену і рискандля того, щоб підтримати на стадії 212 навігацію ня сухопутного транспортного засобу 116, коли або керування сухопутним транспортним засобом транспортний засіб 116 пересікає нерівну місце116, якщо передбачено паралельне або автомативість, з використанням позиції і напряму з створечне керування сухоп утним транспортним засобом ної навігаційної інформації (що засновуються на 116. Таким чином, можна визначати і погоджувати глобальній системі позиціонування) і вимірювання в реальному часі компенсовану відносно схилу ступеню рискання і бічного прискорення сухопутширину колії для робочого пристрою 120 для баганого транспортного засобу 116. Згідно з варіантаторазового перетину місцевості, коли схил місцеми виконання винаходу, коректований напрям мовості, що пересікається сухопутним транспортним жна обчислювати на основі рівняння 1, в той час засобом збільшується або зменшується. як коректовану позицію можна визначити за допоЗгідно з прикладами виконання винаходу, розмогою обчислення відстані зміщення для сухопуткриті способи можна здійснювати у вигляді безлічі ного транспортного засобу 116 з використанням команд, які містить програмне забезпечення або рівняння 2, при цьому відстань зміщення розклаапаратурне забезпечення, і які можна зчитувати за дають на складаючі довготи і широти і складають з допомогою системи 132 обробки компенсаційної позицією, визначеною за допомогою глобальної системи 122 системи координат, приймача 102 системи позиціонування. Потім витягують позицію глобальної системи позиціонування або компонені напрям з створеної на стадії 204 навігаційної інтів навігаційної системи 104. Крім того, потрібно формації і на стадії 210 замінюють коректованою зазначити, що спеціальна послідовність або ієрарпозицією і напрямом, які були обчислені на стадії хія стадій в розкритих способах є ли ше приклада208, з метою отримання коректованої навігаційної ми вихідної ідеї. На основі переваг конструкції моінформації для сухопутного транспортного засобу жна по іншому розташовува ти спеціальну 116. Потім на стадії 212 коректовану навігаційну послідовність або ієрархію стадій в способі. Крім інформацію можна використати для навігації і/або того, потрібно зазначити, що в описаному варіанті керування сухопутним транспортним засобом 116. виконання інформація про швидкість видається у Як показано на Фіг.9, пристрій 130 вимірюванвигляді скалярної величини. Замість цього вона ня прискорення може додатково використовувати може задаватися у вигляді двохмірного або бічне прискорення, вимірюваного на стадії 206 для трьохмірного вектора і коректуватися за допомовизначення кута крену сухопутного транспортного гою компенсаційної системи системи координат, засобу 116, з якого на стадії 214 можна визначити так що відпадає необхідність в окремій інформації схил (S) місцевості, що пересікається сухопутним про напрям. Інформація про позицію може також транспортним засобом 116. Потім схил (S) можна видаватися трьохмірно, тобто може містити склавикористати в системі 104 керування навігацією даючу Z. 19 84538 20 21 Комп’ютерна в ерстка О. Гапоненко 84538 Підписне 22 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюNavigation system of coordinate system of land transportation mean (variants)
Автори англійськоюRekou Endru Carl Vilhelm, Nelson Frederick W., Merser Deiv, Pikett Terens Daniel
Назва патенту російськоюНавигационная система системы координат сухопутного транспортного средства (варианты)
Автори російськоюРекоу Эндрю Карл Вильхельм, Нельсон Фредерик В., Мерсер Дейв, Пикетт Теренс Даниель
МПК / Мітки
МПК: G01C 21/20, G01S 05/14
Мітки: системі, координат, транспортного, сухопутного, навігаційна, варіанти, система, засобу
Код посилання
<a href="https://ua.patents.su/11-84538-navigacijjna-sistema-sistemi-koordinat-sukhoputnogo-transportnogo-zasobu-varianti.html" target="_blank" rel="follow" title="База патентів України">Навігаційна система системи координат сухопутного транспортного засобу (варіанти)</a>
Спосіб контролю гідравлічної системи транспортного засобу (варіанти) та система для контролю і захисту гідравлічної системи транспортного засобу
Номер патенту: 74295
Опубліковано: 15.11.2005
Автори: Маєр Дуейн Фредерік, Родегієро Рено Антоніо, Ейсель Едвін Лі
МПК: F16H 59/72, G06F 7/00, B60K 28/00, F15B 21/00, F15B 13/06, F16H 61/12
Мітки: засобу, система, спосіб, транспортного, варіанти, гідравлічної, захисту, контролю, системі
Формула / Реферат:
1. Спосіб контролю гідравлічної системи транспортного засобу, яка має декілька гідравлічних функціональних елементів (50, 52, 54, 60, 62, 70), гідравлічний насос (12) для подачі гідравлічної рідини під тиском у декілька гідравлічних функціональних елементів (50, 52, 54, 60, 62, 70) через декілька відповідних регулюючих клапанів (16, 20) гідравлічних елементів і електронний блок управління (40) для управління роботою регулюючих клапанів (16,...
Гальмова система транспортного засобу
Номер патенту: 64857
Опубліковано: 15.03.2004
Автори: Морозов Олександр Михайлович, Стецько Сергій Михайлович, Могила Валентин Іванович
МПК: B60T 15/60
Мітки: гальмова, транспортного, система, засобу
Формула / Реферат:
Гальмова система транспортного засобу з різними осьовими навантаженнями, що містить гальмову магістраль, повітророзподільник з запасним резервуаром, багатоканальний редуктор тиску, гальмовий циліндр, важільну гальмову передачу з гальмовими колодками, яка відрізняється тим, що вона забезпечена пристроєм контролю змін вертикальних геометричних характеристик ресорної підвіски, під'єднаним одним дротом до електричної системи транспортного засобу,...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Іванов Робєрт Константіновіч, Ковалєвскій Міхаіл Марковіч, Монахов Юрій Владіміровіч, Борісов Андрєй Владіміровіч, Карпов Анатолій Стєпановіч, Рачук Владімір Сєргєєвіч
МПК: G01S 5/02, G01S 5/00, G01S 5/04
Мітки: відносної, варіанти, координат, навігаційної, базової, осей, спосіб, інерціальної, визначення, об'єкта, системі, положення
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Гальмова система транспортного засобу
Номер патенту: 52885
Опубліковано: 15.01.2003
Автори: Стецько Сергій Михайлович, Могила Валентин Іванович, Морозов Олександр Михайлович
МПК: B60T 15/60
Мітки: система, гальмова, транспортного, засобу
Формула / Реферат:
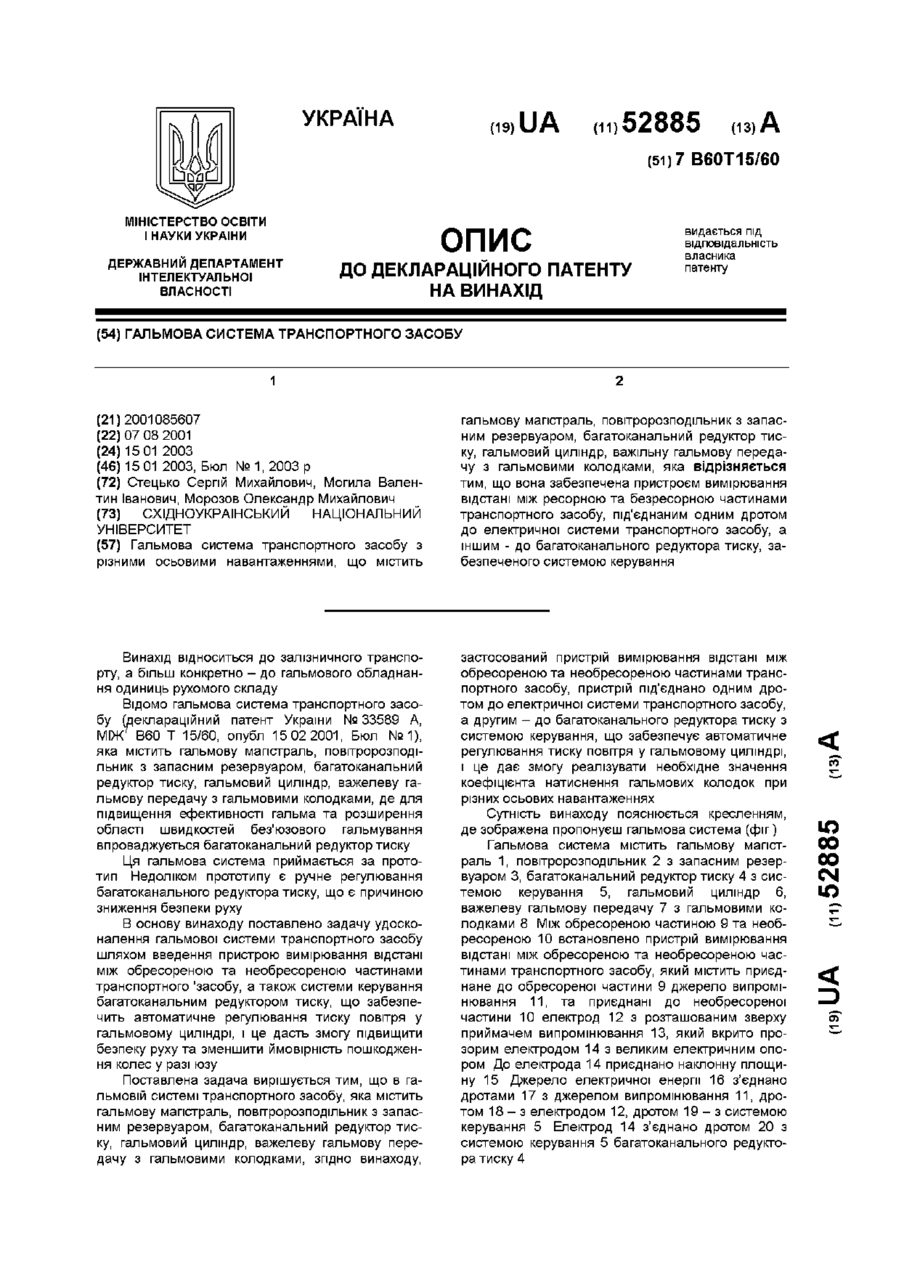
Гальмова система транспортного засобу з різними осьовими навантаженнями, що містить гальмову магістраль, повітророзподільник з запасним резервуаром, багатоканальний редуктор тиску, гальмовий циліндр, важільну гальмову передачу з гальмовими колодками, яка відрізняється тим, що вона забезпечена пристроєм вимірювання відстані між ресорною та безресорною частинами транспортного засобу, під'єднаним одним дротом до електричної системи транспортного...
Система знешкодження вихлопних газів транспортного засобу
Номер патенту: 53021
Опубліковано: 15.01.2003
Автори: Могила Валентин Іванович, Стецько Сергій Михайлович
МПК: F01N 3/08
Мітки: система, газів, транспортного, засобу, знешкодження, вихлопних
Формула / Реферат:
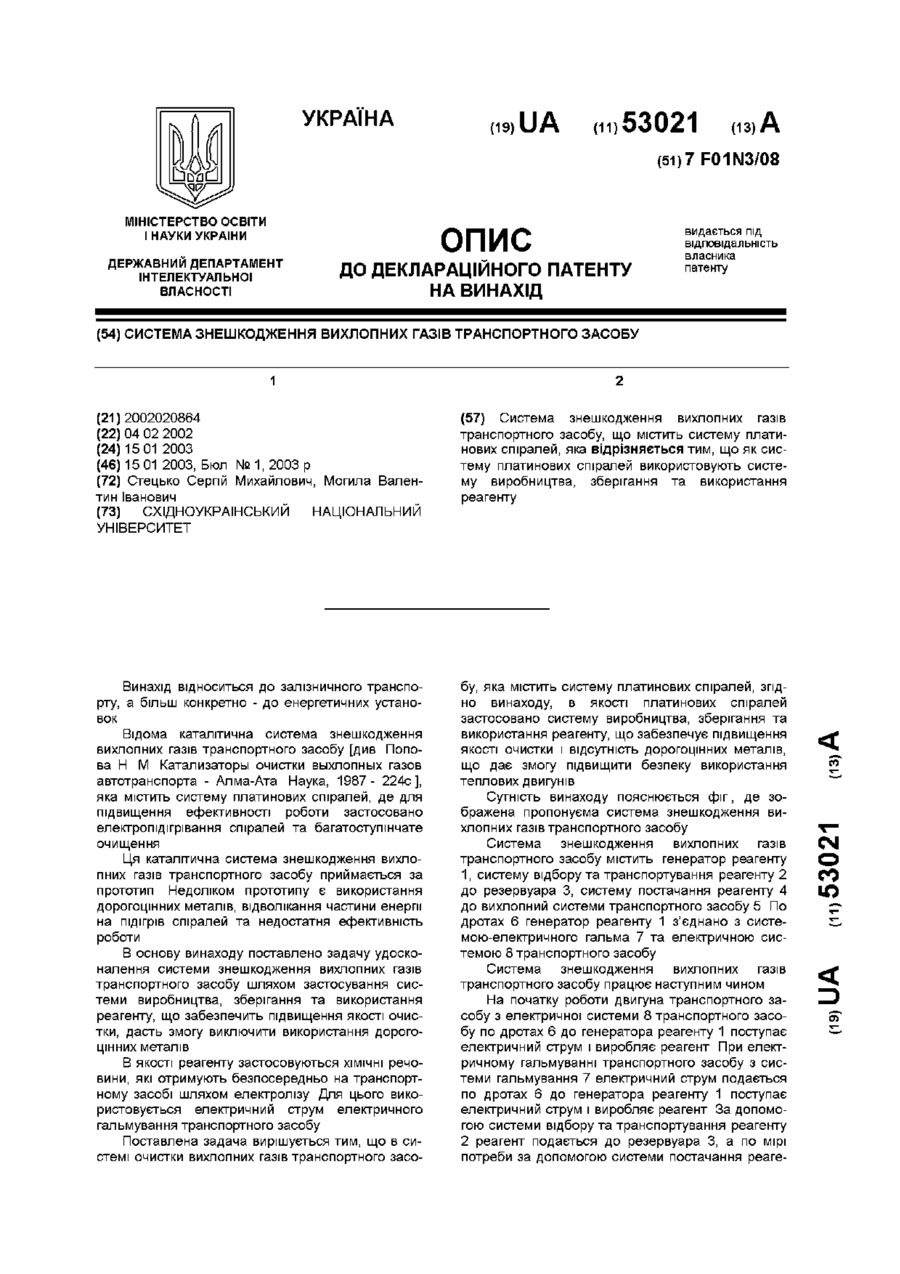
Система знешкодження вихлопних газів транспортного засобу, що містить систему платинових спіралей, яка відрізняється тим, що як систему платинових спіралей використовують систему виробництва, зберігання та використання реагенту.