Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Карпов Анатолій Стєпановіч, Рачук Владімір Сєргєєвіч, Монахов Юрій Владіміровіч, Борісов Андрєй Владіміровіч, Ковалєвскій Міхаіл Марковіч, Іванов Робєрт Константіновіч
Формула / Реферат
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:
- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної системи типу "Глонас" або/і "Navstar" (4), вибраній як базова система координат (3);
- на дільниці траєкторії об'єкта tі-tі+1 вимірюють вектор прискорення в інерціальній системі координат (2) об'єкта (1), по якому визначають координати об'єкта в ті ж моменти часу tі і tі+1;
- в моменти часу tj і tj+1 на дільниці траєкторії об'єкта, не паралельній дільниці попередніх навігаційних вимірювань, проводять аналогічні визначення координат об'єкта в базовій системі координат (3) і в інерціальній системі координат (2) об'єкта (1);
- потім по отриманих координатах на кожній дільниці траєкторії ti-ti+1 i tj-tj+1, яких вибирають, принаймні, дві, визначають вектори переміщення об'єкта Li, Lj в базовій системі координат (3) LiB, LjB і в інерціальній системі координат (2) об'єкта (1) LiU, LjU;
- після чого визначають матрицю переходу між базовою системою координат (3) і інерціальною системою координат (2) об'єкта (1) з системи рівнянь:
LiB=ALiU,
LjB=ALjU,
i,j=l...n, i ≠ j,
де А-матриця переходу з базової системи координат в інерціальну систему координат об'єкта,
n - кількість дільниць траєкторії;
- при цьому, по компонентах матриці А визначають положення осей координат інерціальної навігаційної системи (2) об'єкта відносно базової системі координат (3).
2. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат (2) об'єкта (1), який відрізняється тим, що:
- в моменти часу ti і ti+1 вимірюють вектор швидкості рухoмого об'єкта (1) в системі координат Глобальної навігаційної системи типу "Глонас" або/і "Navstar" (4), вибраній як базова система координат (3);
- на дільниці траєкторії об'єкта ti-ti+1 вимірюють вектор прискорення в інерціальній системі координат (2) об'єкта (1), по якому визначають вектор швидкості об'єкта в ті ж моменти часу ti і ti+1;
- в моменти часу tj і tj+1 на дільниці траєкторії об'єкта (1), не паралельній дільниці попередніх навігаційних вимірювань, проводять аналогічні визначення векторів швидкостей об'єкта (1) в базовій системі координат (3) і в інерціальній системі координат об'єкта (2);
- потім по отриманих векторах швидкостей на кожній дільниці траєкторії ti-ti+1 і tj-tj+1, яких вибирають, принаймні, дві, визначають прирости вектора швидкості об'єкта (1)Vi, AVj в базовій системі координат (3) AViB, ΔVjB, і в інерціальній системі координат (2) об'єкта (1) ViU, ΔVjU;
- після чого визначають матрицю переходу між базовою системою координат (3) і інерціальною системою координат (2) об'єкта (1) з системи рівнянь:
ΔViB = AΔViU
ΔVjB = AΔVjU
i,j=l...n, i ≠ j,
де А-матриця переходу з базової системи координат в інерціальну систему координат об'єкта,
n - кількість дільниць траєкторії;
- при цьому, по компонентах матриці А визначають положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3).
3. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:
- в моменти часу ti і ti+1 вимірюють координати і вектор швидкості рухомого об'єкта (1) в системі координат Глобальної навігаційної системи типу "Глонас" або/і "Navstar" (4), вибраній як базова система координат (3);
- на дільниці траєкторії об'єкта ti-ti+1 вимірюють вектор прискорення в інерціальній системі координат (2) об'єкта (1), по якому визначають координати і вектор швидкості об'єкта (1) в ті ж моменти часу ti і ti+1;
- в моменти часу tj і tj+1 на дільниці траєкторії об'єкта (1), не паралельній дільниці попередніх навігаційних вимірювань, проводять аналогічні визначення координат і вектора швидкості об'єкта (1) в базовій системі координат (3) і в інерціальній системі координат (2) об'єкта (1);
- потім по отриманих координатах і векторах швидкостей на кожній дільниці траєкторії ti-ti+1 i tj-tj+1, яких вибирають, принаймні, дві, визначають вектори переміщення об'єкта (1) Li, Lj і прирости вектора його швидкості (1) ΔVi, AVj в базовій системі координат (3) LiB, LjB, ΔViB, ΔVjB і в інерціальній системі координат (2) об'єкта (1) LiU, LjU, ΔViU, ΔVjU;
- після чого визначають матрицю переходу між базовою системою координат (3) і інерціальної системою координат (2) об'єкта (1) з системи рівнянь:
LiB = ALiU,ΔViB = AΔViU
LjB = ALjU,ΔVjB = AΔVjU
i,j=l...n, i ≠ j,
де А - матриця переходу з базової системи координат в інерціальну систему координат об'єкта,
n - кількість дільниць траєкторії;
- при цьому, по компонентах матриці А визначають положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3).
4. Спосіб за будь-яким з пп. 1, 2, 3, який відрізняється тим, що при русі об'єкта (1) в інерціальному просторі по прямолінійній траєкторії здійснюють його маневр, що реалізовує, принаймні, дві не паралельні дільниці траєкторії, на яких проводять навігаційні вимірювання.
Текст
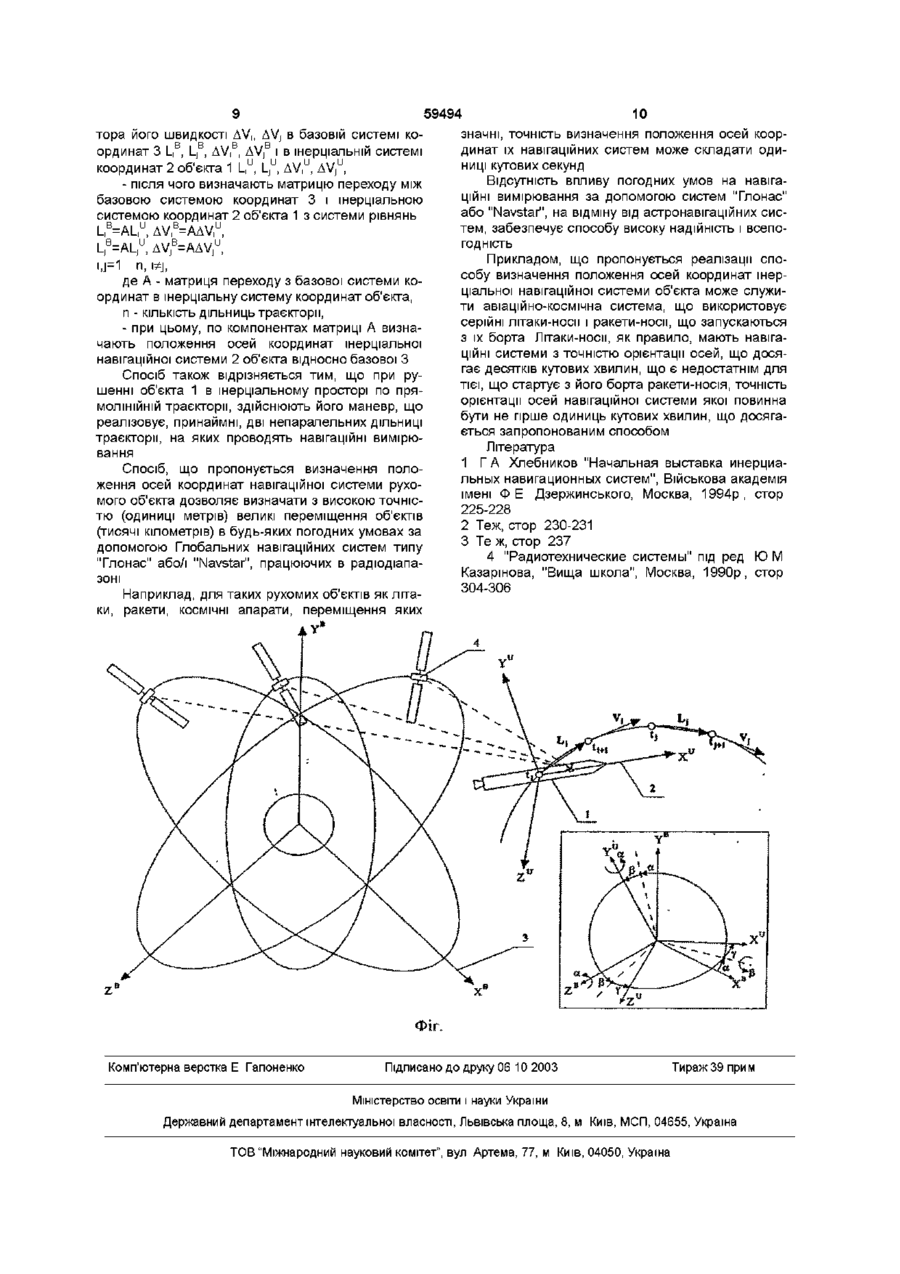
1 Спосіб визначення положення осей координат шерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в шерціальному просторі, в базовій системі координат (3) і в шерціальній системі координат об'єкта (2), який відрізняється тим, що - в моменти часу t, і t,+i вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної системи типу "Глонас" або/і "Navstar" (4), вибраній як базова система координат (3), - на ДІЛЬНИЦІ траєкторії об'єкта t-t+i вимірюють вектор прискорення в шерціальній системі координат (2) об'єкта (1), по якому визначають координати об'єкта в ті ж моменти часу t, і t,+i, - в моменти часу t, і t,+i на ДІЛЬНИЦІ траєкторії об'єкта, не паралельній ДІЛЬНИЦІ попередніх навігаційних вимірювань, проводять аналогічні визначення координат об'єкта в базовій системі координат (3) і в шерціальній системі координат (2) об'єкта (1), - потім по отриманих координатах на кожній ДІЛЬНИЦІ траєкторії t-t+i і tj-tj+1, яких вибирають, принаймні, дві, визначають вектори переміщення об'єкта l_i, L, в базовій системі координат (3) І_,в, Lj B і в шерціальній системі координат (2) об'єкта (1) І_,и, L,U, - після чого визначають матрицю переходу між базовою системою координат (3) і шерціальною системою координат (2) об'єкта (1) з системи рів нянь L,B=AL,U, i j = l п, 1 1 j , де А-матриця переходу з базової системи координат в шерціальну систему координат об'єкта, п - КІЛЬКІСТЬ дільниць траєкторії, - при цьому, по компонентах матриці А визначають положення осей координат шерціальної навігаційної системи (2) об'єкта відносно базової системі координат (3) 2 Спосіб визначення положення осей координат шерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в шерціальному просторі, в базовій системі координат (3) і в шерціальній системі координат (2) об'єкта (1), який відрізняється тим, що - в моменти часу t, і t,+i вимірюють вектор швидкості рухомого об'єкта (1) в системі координат Глобальної навігаційної системи типу "Глонас" або/і "Navstar" (4), вибраній як базова система координат (3), - на ДІЛЬНИЦІ траєкторії об'єкта t-t+i вимірюють вектор прискорення в шерціальній системі координат (2) об'єкта (1), по якому визначають вектор швидкості об'єкта в ті ж моменти часу t, і t,+i, - в моменти часу t, і t,+i на ДІЛЬНИЦІ траєкторії об'єкта (1), не паралельній ДІЛЬНИЦІ попередніх навігаційних вимірювань, проводять аналогічні визначення векторів швидкостей об'єкта (1) в базовій системі координат (3) і в шерціальній системі координат об'єкта (2), - потім по отриманих векторах швидкостей на кожній ДІЛЬНИЦІ траєкторії t-t+i і t,-t,+i, яких вибирають, принаймні, дві, визначають прирости вектора швидкості об'єкта (1 )V,3 AV, в базовій системі координат (3) AV|B, UV, , і в шерціальній системі координат (2) об'єкта (1) V,u, UV,, - після чого визначають матрицю переходу між базовою системою координат (3) і шерціальною системою координат (2) об'єкта (1) з системи рівнянь AV, B = AUV,U UV, B = AUV,U i j = l n, 1 1 j , де А-матриця переходу з базової системи коорди О ю 59494 нат в інерціальну систему координат об'єкта, п - КІЛЬКІСТЬ дільниць траєкторії, - при цьому, по компонентах матриці А визначають положення осей координат шерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3) З Спосіб визначення положення осей координат шерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в шерціальному просторі, в базовій системі координат (3) і в шерціальній системі координат об'єкта (2), який відрізняється тим, що - в моменти часу t, і t,+i вимірюють координати і вектор швидкості рухомого об'єкта (1) в системі координат Глобальної навігаційної системи типу "Глонас" або/і "Navstar" (4), вибраній як базова система координат (3), - на ДІЛЬНИЦІ траєкторії об'єкта t-t+i вимірюють вектор прискорення в шерціальній системі координат (2) об'єкта (1), по якому визначають координати і вектор швидкості об'єкта (1) в ті ж моменти часу t, і t,+i, - в моменти часу t, і t,+i на ДІЛЬНИЦІ траєкторії об'єкта (1), не паралельній ДІЛЬНИЦІ попередніх навігаційних вимірювань, проводять аналогічні визначення координат і вектора швидкості об'єкта (1) в базовій системі координат (3) і в шерціальній сис темі координат (2) об'єкта (1), - потім по отриманих координатах і векторах швидкостей на кожній ДІЛЬНИЦІ траєкторії t-t+i і t,tj+1, яких вибирають, принаймні, дві, визначають вектори переміщення об'єкта (1) Ц L, і прирости вектора його швидкості (1) ДУ,, AV, в базовійсисR R R R темі координат (3) L, , L, , Д\/, , UV, і в шерціальній системі координат (2) об'єкта (1) L, , І_,и, Д\/,и, UV,U, - після чого визначають матрицю переходу між базовою системою координат (3) і інерціальної системою координат (2) об'єкта (1) з системи рівнянь І_,в = AL,U,UV,B = AUV,U L,B = AL,U,UV,B = AUV,U ij=l n, 11 j, де А - матриця переходу з базової системи координат в інерціальну систему координат об'єкта, п - КІЛЬКІСТЬ дільниць траєкторії, - при цьому, по компонентах матриці А визначають положення осей координат шерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3) 4 Спосіб за будь-яким з пп 1, 2, 3, який відрізняється тим, що при русі об'єкта (1) в шерціальному просторі по прямолінійній траєкторії здійснюють його маневр, що реалізовує, принаймні, дві не паралельні ДІЛЬНИЦІ траєкторії, на яких проводять навігаційні вимірювання Винахід, що пропонується відноситься до області навігації різних об'єктів, рухомих в шерціальному просторі і що мають на борту інерціальну навігаційну систему До таких об'єктів можуть відноситися наземні і морські транспортні засоби (автомобілі, судна), а також повітряні і КОСМІЧНІ літальні апарати (літаки, ракети, КОСМІЧНІ апарати) Відомий спосіб визначення положення триосноі навігаційної системи по одночасних вимірюваннях гравітаційного прискорення і кутовій швидкості обертання Землі [1] Спосіб використовується, в основному, для початкового виставлення шерціальних систем нерухомих відносно Землі об'єктів, причому як базову часто приймають географічну систему координат Спосіб не може бути застосований для рухомих об'єктів, що відчувають прискорення і кутові вих непогоджень по каналах тангажа, рискання і крену), при цьому визначається інерціальна довгота місцеположення апарату по азимуту кута повороту в полі зору зоряного датчика вибраної зірки навколо напряму «апарат - Полярна зірка» відносно бази відліку і з урахуванням шерціальної довготи цієї бази, параметри якої запам'ятовуються При цьому база відліку - площина, що містить напрями «апарат-Полярна зірка» і «апарат - навігаційна зірка», характеризується шерціальною довготою, рівною прямому сходженню Полярної зірки, і розгорнена відносно загальної площини чутливості датчиків Землі і Полярної зірки на кут, рівний куту між площиною, що містить напрям «центр Землі - Полярна зірка» і «центр Землі - полюс Світу» і площиною, що містить напрям «центр Землі Полярна зірка» і «центр Землі - навігаційна зірка» Однак ці способи вимагають наявності на борту об'єкта оптичних засобів, наприклад, астровізирів, і дотримання умов видимості оптичних орієнтирів Для наземних об'єктів і літальних апаратів в атмосфері, схильних до впливів метеоумов, застосування оптичних засобів обмежує використання способу Найбільш близьким аналогом способу, що пропонується визначення положення осей координат шерціальної навігаційної системи об'єкта відносно базової системи координат є спосіб, заснований на одночасному вимірюванні вектора прискорення в базовій системі і системі, що визначається [3] Причому, вектор прискорення вимірюється, принаймні, в двох точках траєкторії, де виміряні вектора прискорення не паралельні ШВИДКОСТІ Відомий спосіб визначення положення триосноі навігаційної системи відносно базової системи координат, заданої відомими оптичними напрямами [2] Спосіб використовується як для початкового виставлення осей навігаційної системи нерухомих об'єктів у відомих напрямах, наприклад, на вибрані зірки, так і в процесі рушення об'єкта Відомий також спосіб астронавігації по патенту №2033949 РФ (МКИ6 B64G, 1/24) що включає поєднання загальної площини чутливості датчиків Землі і Полярної зірки, що містить подовжню вісь космічного апарату, з площиною «центр Землі апарат - Полярна зірка» (на основі виміряних куто 59494 Спосіб може використовуватися тільки в тих випадках, коли базова система координат і система координат об'єкта відчувають одне і те саме прискорення, тобто носій базової системи і об'єкт пов'язані механічно і рухаються по єдиній траєкторії Наприклад, літак (об'єкт) на палубі авіаносця (носія базової системи), ракета (об'єкт) на борту літака-носія (носія базової системи) Спосіб має практичне значення в тих випадках, коли базова система координат відома з кращою точністю, ніж система координат об'єкта, а також коли точність базової системи координат достатня для виконання навігаційної задачі об'єкта На практиці часто ці умови не виконуються і спосіб не може бути застосований, наприклад, ракета носій повинна мати точність орієнтації осей шерціальної системи не гірше одиниць кутових хвилин, в той час як літак-носій до моменту запуску ракети-носія може мати орієнтацію осей базової системи координат з погрішністю - десятки кутових хвилин Задачею винаходу, що пропонується, є підвищення точності і надійності визначення положення осей координат інерціальної навігаційної системи рухомого об'єкта, забезпечення всепогодності цього визначення Дана задача досягається тим, що в способі по варіанту 1 визначення положення осей координат інерціальної навігаційної системи об'єкта відносно базової системи координат, що включає навігаційні вимірювання об'єкта, рухомого в шерціальному просторі, в базовій системі координат і в інерціальній системі координат об'єкта - в моменти часу t, і t+i вимірюють координати рухомого об'єкта в системі координат Глобальної навігаційної системи типу «Глонас» або/і «Navstar», вибраній як базова система координат, - на ДІЛЬНИЦІ траєкторії об'єкта t, - t,+i вимірюють вектор прискорення в шерціальній системі координат об'єкта, по якому визначають координати об'єкта в ті ж моменти часу t, і t,+i, - в моменти часу t, і t,+i на ДІЛЬНИЦІ траєкторії об'єкта, не паралельній ДІЛЬНИЦІ попередніх навігаційних вимірювань, проводять аналогічні вимірювання координат об'єкта в базовій системі координат і в шерціальній системі координат об'єкта, - потім по отриманих координатах на кожній ДІЛЬНИЦІ траєкторії t, - t,+i і t, - t,+i, яких вибирають, принаймні, дві, визначають вектора переміщення об'єкта І.,, L, в базовій системі координат І_,в І_,в і в шерціальній системі координат об'єкта І_,и, L, , - після чого визначають матрицю переходу між базовою системою координат і шерціальною системою координат об'єкта з системи рівнянь І_,в=АІ_,и, І В=АІ и IJ=1 П, I^J, де А-матриця переходу з базової системи координат в інерціальну систему координат об'єкта, п - КІЛЬКІСТЬ дільниць траєкторії, - при цьому, по компонентах матриці А визначають положення осей координат інерціальної навігаційної системи об'єкта відносно базової У способі, що пропонується по варіанту 2 визначення положення осей координат інерціальної 6 навігаційної системи об'єкта відносно базової системи координат, що включає навігаційні вимірювання об'єкта, рухомого в шерціальному просторі, в базовій системі координат і в шерціальній системі координат об'єкта - в моменти часу t, і t,+i вимірюють вектор швидкості рухомого об'єкта в системі координат Глобальної навігаційної системи типу Тлонас" або/і "Navstar", вибраній як базова система координат, - на ДІЛЬНИЦІ траєкторії об'єкта t, - t,+i вимірюють вектор прискорення в шерціальній системі координат об'єкта, по якому визначають вектор швидкості об'єкта в ті ж моменти часу t, і t,+i, - в моменти часу t, і t,+i на ДІЛЬНИЦІ траєкторії об'єкта, не паралельній ДІЛЬНИЦІ попередніх навігаційних вимірювань, проводять аналогічні вимірювання вектора швидкості об'єкта в базовій системі координат і в шерціальній системі координат об'єкта, - потім по отриманих векторах швидкостей на кожній ДІЛЬНИЦІ траєкторії t, - t,+i і t, -t,+i, яких вибирають, принаймні, дві, визначають прирости вектора швидкості об'єкта AV,, Д\А, в базовій системі R R координат AN/, , AV, , і в шерціальній системі координат об'єкта AV|U,°, AV,U, - після чого визначають матрицю переходу між базовою системою координат і шерціальною системою координат об'єкта з системи рівнянь AV,B=AAV, , AV,B=AAV,U, IJ=1 n, I^J, де А - матриця переходу з базової системи координат в інерціальну систему координат об'єкта, п - КІЛЬКІСТЬ дільниць траєкторії, - при цьому, по компонентах матриці А визначають положення осей координат інерціальної навігаційної системи об'єкта відносно базової У способі, що пропонується по варіанту 3 визначення положення осей координат інерціальної навігаційної системи об'єкта відносно базової системи координат, що включає навігаційні вимірювання об'єкта, рухомого в шерціальному просторі, в базовій системі координат і в шерціальній системі координат об'єкта - в моменти часу t, і t,+i вимірюють координати і вектор швидкості рухомого об'єкта в системі координат Глобальної навігаційної системи типу "Глонас" або/і "Navstar", вибраній як базова система координат, - на ДІЛЬНИЦІ траєкторії об'єкта t, - t,+i вимірюють вектор прискорення в шерціальній системі координат об'єкта, по якому визначають координати і вектор швидкості об'єкта в ті ж моменти часу t, itl+i, - в моменти часу t, і t,+i на ДІЛЬНИЦІ траєкторії об'єкта, не паралельній ДІЛЬНИЦІ попередніх навігаційних вимірювань, проводять аналогічні вимірювання координат і вектора швидкості об'єкта в базовій системі координат і в шерціальній системі координат об'єкта, - потім по отриманих координатах і векторах швидкостей на кожній ДІЛЬНИЦІ траєкторії t, - t,+i 11, tj+1, яких вибирають, принаймні, дві, визначають вектора переміщення об'єкта Ц L, і прирости вектора його швидкості AN/,, AV, в базовій системі ко 59494 ординат L, , L, , AV, , AV, , і в шерціальній системі координат об'єкта І_,и, І_,и, AN/,11, AV,U, - після чого визначають матрицю переходу між базовою системою координат і шерціальною системою координат об'єкта з системи рівнянь І_,в=АІ_,и, AV,B=AAV,U, І_,в=АІ_,и, AV,B=AAV,U, IJ=1 n, I^J, де А- матриця переходу з базової системи координат в шерціальну систему координат об'єкта, п - КІЛЬКІСТЬ дільниць траєкторії, - при цьому, по компонентах матриці А визначають положення осей координат інерціальної навігаційної системи об'єкта відносно базової У способі, що пропонується при рушенні об'єкта в шерціальному просторі по прямолінійній траєкторії, здійснюють його маневр, що реалізовує, принаймні, дві непаралельних ДІЛЬНИЦІ траєкторії, на яких проводять згадані навігаційні вимірювання Суть способу, що пропонується ілюструється на ф і г , де 1 - об'єкт, 2 - осі координат інерціальної навігаційної системи об'єкта X , Y u , Z u , 3 - осі координат базової системи Х в , YB, Z B , 4 - глобальна навігаційна система типу "Глонас" ("Navstar"), t, t,+i, tj, tj+i - моменти часу, в які визначають координати рухомого об'єкта в базовій системі координат типу "Глонас" або/і "Navstar" і в інерціальній системі координат об'єкта, І.,, L, - вектора переміщення об'єкта ВІДПОВІДНО на ДІЛЬНИЦІ траєкторії t, - t,+i 11, - t,+i, AV|, AV, - приріст вектора швидкостей об'єкта ВІДПОВІДНО на ДІЛЬНИЦІ траєкторії t, - t,+i і tj - t,+i а, р, у - кути, що визначають положення осей координат інерціальної навігаційної системи об'єкта Х и , Y u , Z u відносно осей координат базової системи Х в , YB, Z B (кути Ейлера) Спосіб відрізняється від відомих аналогів тим, що у варіанті 1 - в моменти часу t, і t+i вимірюють координати рухомого об'єкта 1 в системі координат 3 Глобальної навігаційної системи 4, вибраній як базова система координат [4], - в ті ж моменти часу t, і t,+i визначають ті ж координати об'єкта 1 в шерціальній навігаційній системі координат об'єкта 2 по вимірюваннях вектора прискорення на ДІЛЬНИЦІ траєкторії t, - t,+i, - в моменти часу t, і t,+i на ДІЛЬНИЦІ траєкторії об'єкта 1, не паралельній ДІЛЬНИЦІ попередніх навігаційних вимірювань, здійснюють вимірювання координат об'єкта в базовій системі координат 3 і в шерціальній системі координат об'єкта 2, - потім по отриманих координатах об'єкта 1 на кожній ДІЛЬНИЦІ траєкторії t, - t,+i 11, - t,+i, яких вибирають, принаймні, дві, визначають вектора переміщення І.,, L, в базовій системі координат З І_,в, І_,в, і в шерціальній системі координат об'єкта 2 І_,и, L, - після чого визначають кути непогодження між базовою системою координат 3 і шерціальною системою координат об'єкта 2 з системи рівнянь І_,в=АІ_,и, І В =АІ и IJ=1 П, I^J, 8 де А-матриця переходу з базової системи координат 3 в шерціальну систему координат об'єкта 2, п - КІЛЬКІСТЬ дільниць траєкторій, - по отриманих компонентах матриці переходу А визначають положення осей координат інерціальної навігаційної системи об'єкта 2 відносно базової 3, тобто визначають кути непогодження між ними а, р, у (кути Ейлера) Спосіб відрізняється також тим, що у варіанті 2 - в моменти часу t, і t,+i вимірюють вектор швидкості рухомого об'єкта 1 в системі координат З Глобальної навігаційної системи 4 типу "Глонас" (або/і "Navstar"), вибраної як базова система координат, - на ДІЛЬНИЦІ траєкторії об'єкта 1 t, - t,+i вимірюють вектор прискорення в шерціальній системі координат об'єкта 2, по якому визначають вектор швидкості об'єкта в ті ж моменти часу t, і t,+i, - в моменти часу t, і t,+i на ДІЛЬНИЦІ траєкторії об'єкта, не паралельній ДІЛЬНИЦІ попередніх навігаційних вимірювань, проводять аналогічні вимірювання вектора швидкості об'єкта в базовій системі координат 3 і в шерціальній системі координат об'єкта 2, - потім по отриманих векторах швидкостей на кожній ДІЛЬНИЦІ траєкторії t, - t,+i 11, - t,+i, яких вибирають, принаймні, дві, визначають прирости вектора швидкості об'єкта AV,, AV, в базовій системі R R координат З AV, , AV, , і в шерціальній системі координат 2 об'єкта AV, , AV,U, - після чого визначають матрицю переходу між базовою системою координат 3 і шерціальною системою координат 2 об'єкта з системи рівнянь AV,B=AAV,U, AV,B=AAV,U, IJ=1 n, I^J, де А - матриця переходу з базової системи координат в шерціальну систему координат об'єкта, п - КІЛЬКІСТЬ дільниць траєкторії, - при цьому, по компонентах матриці А визначають положення осей координат інерціальної навігаційної системи 2 об'єкта відносно базової З Спосіб, що пропонується по варіанту 3 відрізняється тим, що - в моменти часу t, і t,+i вимірюють координати і вектор швидкості рухомого об'єкта 1 в системі координат Глобальної навігаційної системи 4 "Глонас" або/і "Navstar", вибраній як базова система координат, - на ДІЛЬНИЦІ траєкторії об'єкта t, - t,+i вимірюють вектор прискорення в шерціальній системі координат 2 об'єкта, по якому визначають координати і вектор швидкості об'єкта 1 в ті ж моменти часу t, і t,+i, - в моменти часу t,, і t,+i на ДІЛЬНИЦІ траєкторії об'єкта 1, не паралельній ДІЛЬНИЦІ попередніх навігаційних вимірювань, проводять аналогічні визначення координат і вектора швидкості об'єкта в базовій системі координат 3 і в шерціальній системі координат об'єкта 2, - потім по отриманих координатах і векторах швидкостей на кожній ДІЛЬНИЦІ траєкторії t, - t,+i 11,, - tj+1, яких вибирають, принаймні, дві, визначають вектора переміщення об'єкта Ц L, і прирости век 59494 тора його швидкості AV,, AV, в базовій системі координат З І_|В, І_,в, AV,B, AV,B і в шерціальній системі координат 2 об'єкта 1 І_,и, L,u, Д\/,и, Д\/,и, - після чого визначають матрицю переходу між базовою системою координат 3 і шерціальною системою координат 2 об'єкта 1 з системи рівнянь І_,в=АІ_,и, AV,B=AAV,U, І_,в=АІ_,и, AV,B=AAV,U, IJ=1 n, I^J, де А - матриця переходу з базової системи координат в шерціальну систему координат об'єкта, п - КІЛЬКІСТЬ дільниць траєкторії, - при цьому, по компонентах матриці А визначають положення осей координат інерціальної навігаційної системи 2 об'єкта відносно базової З Спосіб також відрізняється тим, що при рушенні об'єкта 1 в шерціальному просторі по прямолінійній траєкторії, здійснюють його маневр, що реалізовує, принаймні, дві непаралельних ДІЛЬНИЦІ траєкторії, на яких проводять навігаційні вимірювання Спосіб, що пропонується визначення положення осей координат навігаційної системи рухомого об'єкта дозволяє визначати з високою точністю (одиниці метрів) великі переміщення об'єктів (тисячі кілометрів) в будь-яких погодних умовах за допомогою Глобальних навігаційних систем типу "Глонас" або/і "Navstar", працюючих в радіодіапазоні Наприклад, для таких рухомих об'єктів як літаки, ракети, КОСМІЧНІ апарати, переміщення яких У8 10 значні, точність визначення положення осей координат їх навігаційних систем може складати одиниці кутових секунд Відсутність впливу погодних умов на навігаційні вимірювання за допомогою систем "Глонас" або "Navstar", на відміну від астронавігаційних систем, забезпечує способу високу надійність і всепогодність Прикладом, що пропонується реалізації способу визначення положення осей координат інерціальної навігаційної системи об'єкта може служити авіаційно-космічна система, що використовує серійні літаки-носм і ракети-носм, що запускаються з їх борта Літаки-носм, як правило, мають навігаційні системи з точністю орієнтації осей, що досягає десятків кутових хвилин, що є недостатнім для тієї, що стартує з його борта ракети-носія, точність орієнтації осей навігаційної системи якої повинна бути не гірше одиниць кутових хвилин, що досягається запропонованим способом Література 1 Г А Хлебников "Начальная выставка инерциальных навигационных систем", Військова академія імені Ф Е Дзержинського, Москва, 1994р, стор 225-228 2 Теж, стор 230-231 3 Те ж, стор 237 4 "Радиотехнические системы" під ред Ю М Казаршова, "Вища школа", Москва, 1990р, стор 304-306 ФІГ. Комп'ютерна верстка Е Гапоненко Підписано до друку 06 10 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining positions of the coordinate system axes of the inertial navigation system of an ob]ect relative to the datum coordinate system (variants)
Назва патенту російськоюСпособ определения положений осей координат системы инерциальной навигации объекта относительно базовой системы координат (варианты)
Автори російськоюКарпов Анатолий Степанович, Рачук Владимир Сергеевич, Иванов Роберт Константинович, МОНАХОВ Юрий Владимирович, КОВАЛЕВСКИЙ Михаил Маркович, БОРИСОВ Андрей Владимирович
МПК / Мітки
МПК: G01S 5/04, G01S 5/00, G01S 5/02
Мітки: базової, осей, відносної, варіанти, спосіб, положення, системі, визначення, об'єкта, інерціальної, координат, навігаційної
Код посилання
<a href="https://ua.patents.su/5-59494-sposib-viznachennya-polozhennya-osejj-koordinat-inercialno-navigacijjno-sistemi-obehkta-vidnosno-bazovo-sistemi-varianti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)</a>
Пристрій для обробки зображень та спосіб визначення лінійного зсуву зразка відносно номінального положення
Номер патенту: 27331
Опубліковано: 15.09.2000
Автори: Фінкельштейн Іра, Ейзенбарт Крістоф, Панофські Едвард, Макчі Денніс
МПК: G07D 7/00
Мітки: обробки, визначення, зображень, зсуву, номінального, зразка, спосіб, пристрій, положення, лінійного, відносної
Текст:
...На фиг.2 показана отпечатанная банкнота 9 на листе 3, на которой имеется изображение 10. Для того, чтобы определить, есть ли смещение изображения 10, выбираются три отдельных фрагмента 11, 12, 13 и анализируются так, как будет описано ниже. Три фрагмента могут быть выбраны произвольно, однако предпочтительно выбирать фрагменты, которые содержат хорошо различимые элементы, вытянутые вдоль одной или обеих ортогональных осей X и Y Для...
Спосіб визначення координат наземного джерела радіовипромінювання
Номер патенту: 43565
Опубліковано: 17.12.2001
Автори: Худов Генадій Володимирович, Березіна Світлана Іванівна, Бутенко Ольга Станіславівна, Голкін Дмитро Васильович, Деденок Віктор Петрович
МПК: G01S 5/06
Мітки: спосіб, джерела, наземного, визначення, координат, радіовипромінювання
Формула / Реферат:
Спосіб, визначення координат наземного джерела радіовипромінювання, який полягає в тому, що приймачі випромінювання встановлюють в двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від джерела випромінювання до приймачів і запам'ятовують час виміру, виміряне значення різниці дальностей використовують для індикації першого різницево-дальномірного пеленга, який відрізняється тим, що радіоприймачі випромінювання...
Спосіб визначення координат та орієнтації осі свердловини

Номер патенту: 31185
Опубліковано: 15.12.2000
Автори: Карпачов Юрій Андрійович, Рудик Юрій Микитович, Анупрієнко Генадій Єфремович
МПК: E21B 47/02, G01C 9/00
Мітки: координат, свердловини, орієнтації, визначення, спосіб, осі
Текст:
...: i i i (2 ) (2 ) j ic = - cosb ( 2 ) sina ( 2) i i i i (2 ) cos b ( 2 ) cos a ( 2 ) j i i i + (2 ) sinb ( 2 ) k i . i (4) + + Із виразу (4) отримуєм вираз для вектора (поворот нанавколо осі O iO i+ 1 : ( 2) ( 2) æ O iOi + 1 = R jic = ç - cos b ( 2 ) sin a ( 2 ) ii + i i è вісью O iz( 2 ) жорстко зв'язаною з возиком 2. i При цьому створюється система координат O ix( 2) y( 2 ) z( 2) (див. фіг. 2), де вісь Oi y( 2 ) направлеik ic ic ic ...
Вібростенд для випробувань виробів на дію вертикальної і кутової вібрації відносно горизонтальних осей
Номер патенту: 5879
Опубліковано: 29.12.1994
Автори: Фомін Володимир Нілович, Приходько Олег Борисович, Шпачук Володимир Петрович, Проценко Ігор Павлович, Божко Олександр Євгенович, Попов Борис Семенович
МПК: G01M 7/00
Мітки: відносної, вертикальної, осей, вібростенд, виробів, випробувань, дію, кутової, вібрації, горизонтальних
Формула / Реферат:
Вибростенд для испытания изделий на воздействие вертикальной и угловой вибрации относительно горизонтальных осей, содержащий основание, установленное на нем первое устройство для возбуждения угловой вибрации, соединенную с ним поворотную первую платформу, размещенные на платформах возбудитель вертикальной вибрации и второе устройство для возбуждения угловой вибрации и стол для закрепления испытуемых изделий, отличающийся тем, что, с...
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі
Номер патенту: 46388
Опубліковано: 15.05.2002
Автори: Деденок Віктор Петрович, Худов Генадій Володимирович, Бутенко Ольга Станіславівна, Березіна Світлана Іванівна, Голкін Дмитро Васильович
МПК: G01S 5/06
Мітки: комплекси, визначення, координат, вимірювальному, спосіб, радіовипромінювання, джерела, однобазовому
Формула / Реферат:
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі, що полягає в тому, що приймачі радіовипромінювання розміщають у двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від того самого джерела радіовипромінювання до приймачів і запам'ятовують час виміру, який відрізняється тим, що шляхом розміщення одного з приймачів випромінювання на літальному апараті національної...
Попередній патент: Спосіб лікування хворих на епілепсію
Наступний патент: Рентгенівський вимірювально-випробувальний комплекс
Випадковий патент: Великий конус засипного апарата доменної печі