Пристрій для висіву насіння просапних культур і внесення добрив
Номер патенту: 84931
Опубліковано: 11.11.2013
Автори: Назаренко Володимир Михайлович, Лобов Вячеслав Йосипович, Дубовик Ігор Ігорович
Формула / Реферат
1. Пристрій для висіву насіння просапних культур і внесення добрив, що включає: сошник, насіннєпровід, що висіває, з поєднаним з ним датчиком висіву насіння, висівний апарат з cellular диском, котки, що накочуються, шлейф, і перед сошником встановлений пристрій ґрудковідведення, а за сошником послідовно встановлений патрубок для введення в ґрунт порції активованих добрив і стимуляторів росту, який приєднаний до ємності для рідини та керованими від контролера керування електроклапаном і електронасосом активованих добрив й стимуляторів росту та механізмом регулювання жорсткості пружини колеса, що накочується, обід якого відповідає профілю борозни, а виходи датчиків обертання висівного диска та висіву насінин і пульта керування є входами контролера керування, і блок живлення, який відрізняється тим, що додатково введені розпушувач ґрунту, блок регулювання розпушувача ґрунту, ємність для води з керованими від контролера електроклапаном води й електронасосом води, з'єднаних через додатковий патрубок до патрубка для введення в ґрунт порцій активованих добрив, стимуляторів росту й води, тепловізор з вбудованою в нього цифровою камерою, по тепловому полю якого визначають температуру й вологість орного поля та посівної борозни, датчик рівня насіння у висівному апараті, послідовний інтерфейс, аналізатор, з'єднаний через інтерфейс з контролером керування і через відеоінтерфейс з тепловізором з вбудованою в нього цифровою камерою, а вихід датчика рівня насіння у висівному апараті є входом контролера керування, який зв'язаний у двох напрямках з послідовним інтерфейсом, причому вихід контролера керування підключений до блока регулювання розпушувачем ґрунту.
2. Пристрій за п. 1, який відрізняється тим, що в нього інтегровано аналізатор, який містить відеоінтерфейс, регістр зберігання-зсуву, блок визначення ступеня полінома, схему підключення кінцевих різниць, блоки множення, схему тимчасових коефіцієнтів Ньютона, елемент затримки, шину задання тимчасової точки, на яку необхідно здійснити прогноз похибки, причому вхід елемента затримки з'єднаний з останнім осередком регістра зберігання-зсуву, виходи якого є першими входами блока визначення ступеня полінома, перший вихід якого є першим входом схеми тимчасових коефіцієнтів Ньютона і першим входом схеми підключення кінцевих різниць, другий вхід якої з'єднаний з першим виходом блока визначення ступеня полінома, а виходи схеми підключення кінцевих різниць є першими входами блоків множення, другі входи яких з'єднані з виходами схеми тимчасових коефіцієнтів Ньютона, другий вхід якої з'єднаний з шиною задання тимчасової точки прогнозування, яка з'єднана з першим виходом контролера, який призначений для керування відеоінтерфейсом, регістром зберігання-зсуву і блоком визначення ступеня полінома, з'єднаних між собою входами і підключених до другого його виходу, та обчислення прогнозу похибки з використанням блока похибки, а третій вихід контролера в двох напрямках підключений до входу блока пам'яті, вихід якого є першим входом блока аналізу і корекції, призначеного для обчислення і корекції повної похибки за заданим алгоритмом, що підключено до входу інтерфейсу, вихід якого є інформаційними входами мультиплексора, а його адресні входи підключені до четвертого виходу контролера, у якого входи з'єднані з виходами блоків множення, причому другий вихід блока аналізу і корекції підключений до першого додаткового входу блока визначення ступеня полінома.
Текст
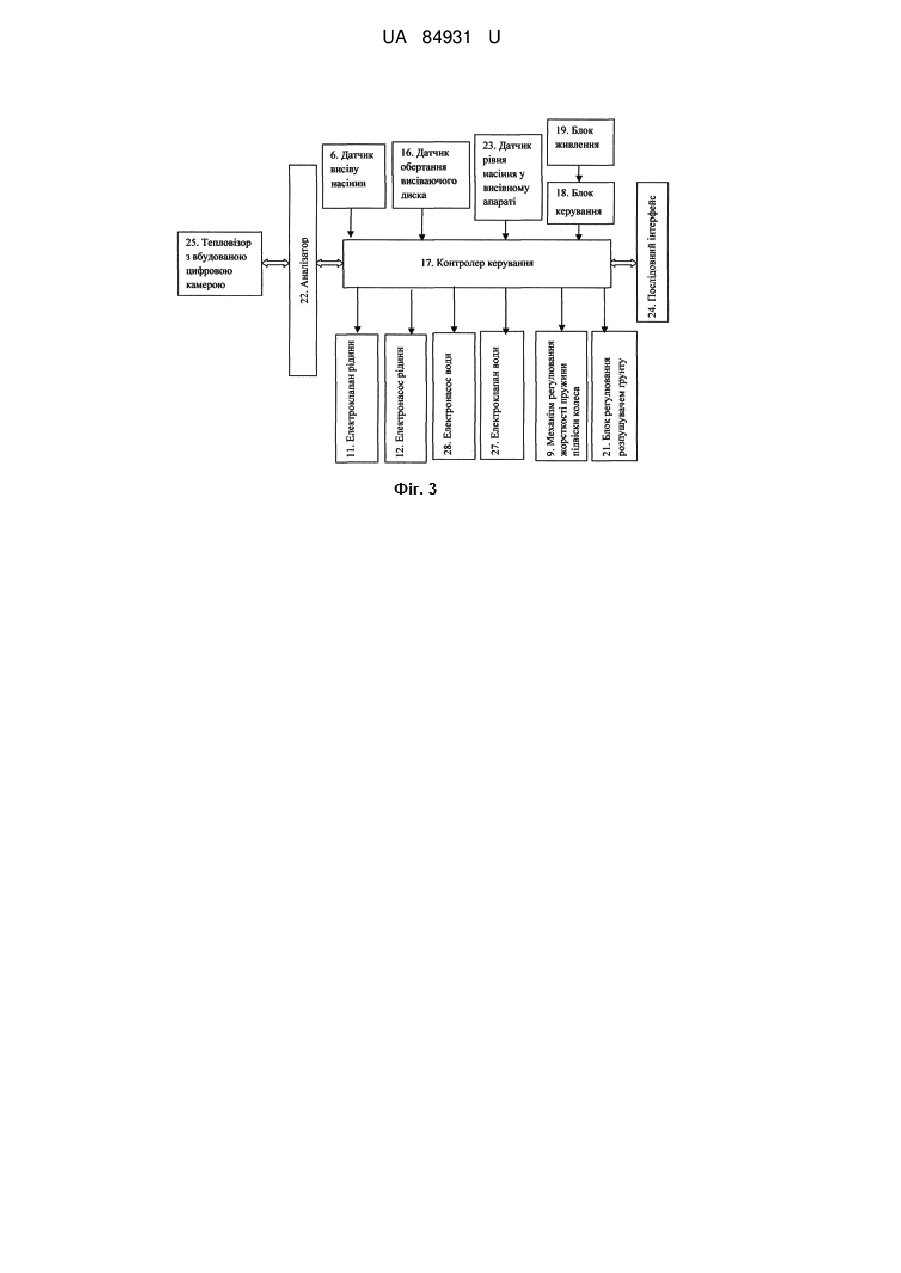
Реферат: Пристрій для посіву просапних культур і внесення добрив включає: сошник, насіннєпровід, датчик висіву насіння, висівний апарат з cellular диском, котки, що накочуються, шлейф, пристрій ґрудковідведення, патрубок для введення в ґрунт порції активованих добрив і стимуляторів росту, ємність для рідини та контролер керування електроклапаном і електронасосом, механізм регулювання жорсткості пружини колеса, пульт керування та блок живлення. Додатково введені розпушувач ґрунту, блок регулювання розпушувача ґрунту, ємність для води з керованими від контролера електроклапаном води й електронасосом води, з'єднаних через додатковий патрубок до патрубка для введення в грунт порцій активованих добрив, стимуляторів росту й води, тепловізор з вбудованою в нього цифровою камерою, датчик рівня насіння у висівному апараті, послідовний інтерфейс, аналізатор, з'єднаний через інтерфейс з контролером керування і через відеоінтерфейс з тепловізором з вбудованою в нього цифровою камерою. UA 84931 U (12) UA 84931 U UA 84931 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до сільськогосподарського виробництва, зокрема до точної технології сівби просапних культур, наприклад цукрового буряка, кукурудзи, соняшника та інших культур, а також до способів обробки ґрунту в поєднанні з іншими сільгоспроботами, наприклад внесенням насіння і добрив у ґрунт, і може бути використана для всіх сільськогосподарських культур. До відомих пристроїв для посіву просапних культур можна віднести пристрій для висіву насіння, що включає висівний апарат з cellular диском, пристрій ґрудковідведення на незалежній підвісці, передній і задній котки, що накочуються, кілевидний сошник з щічками, виштовхувач і ємнісний датчик висіву насіння, поєднаний з пристроєм, який направляє [Авторское свидетельство СССР № 829009, МПК А01С 7/04]. Недоліком відомих пристроїв є те, що технологічні та технічні рішення спрямовані на підвищення точності висіву і не забезпечують максимальне польове проростання насіння з урахуванням неоднорідних властивостей і фізико-механічних параметрів (щільність ґрунту, її аерація, шпаруватість і вологість) ґрунту на довжині гону, мінімальні витрати рідини, а також оптимальну рівномірність розміщення насіння в борозні та рядках. При нестачі опадів і засушливій погоді відсутність контролю за температурою і вологістю орного поля та посівної борозни ґрунту часто значно перевищує науково обґрунтовану глибину загортання насіння, що вимагає перенесення строків сівби, або висівання насіння на ризик у сухий ґрунт. Все це в подальшому не гарантує сходів і урожаю вирощуваних культур. Найбільш близьким по технічній суті до запропонованого пристрою для посіву просапних культур є вибраний як прототип пристрій висіву насіння [патент № 2369065 RU, МПК А01С 7/00, 10.10.2009]. Даний пристрій має в своєму складі: сошник, насіннєпровід, що висіває, з поєднаним з ним датчиком висіву насіння, висівний апарат з cellular диском, котки, що накочуються, шлейф, і перед сошником встановлений пристрій ґрудковідведення, а за сошником послідовно встановлений патрубок для введення в ґрунт порції активованих добрив і стимуляторів росту, який приєднаний до ємності для рідини та керованими від контролера керування електроклапаном і електронасосом активованих добрив й стимуляторів росту та механізмом регулювання жорсткості пружини колеса, що накочується, обід якого відповідає профілю борозни, а виходи датчиків обертання висівного диска та висіву насінин і пульта керування є входами контролера керування, і блок живлення. Недоліком даного пристрою є те, що технологічні та технічні рішення спрямовані на підвищення точності висіву і не забезпечують максимальну польову схожість насіння з урахуванням неоднорідних властивостей та фізико-механічних параметрів ґрунту на довжині гону, мінімальні витрати рідини, а також оптимальну рівномірність розміщення насіння в борозні. Використання датчика вологості ґрунту, який прикріплений до торця сошника під насіннєпровід, і пов'язаного з використанням контакту датчика з ґрунтом, призводить до механічного зносу, брязкоту контактів, помилкових спрацьовувань і виникнення відмов. Визначення вологості по омічному опору ґрунту приводить до великої похибки, особливо при швидкому переміщенню сівалки і тому дає недійсне визначення вологості ґрунту. За допомогою контактного датчика вологи практично неможливо здійснити безперервний контроль. Ці недоліки знижують польову схожість насіння і рівномірність розміщення насіння в борозні, а також призводять до збільшення витрат рідини, що вноситься в борозну. Задачею корисної моделі є удосконалення пристрою висіву насіння за рахунок використання безконтактних датчиків контролю реального стану посівного поля, температури та вологості орного поля, посівної борозни та її щільності, що мають меншу похибку і більшу точність вимірювання цих параметрів. Поставлена задача вирішується тим, що пристрій для посіву просапних культур і внесення добрив містить: сошник, насіннєпровід, що висіває, з поєднаним з ним датчиком висіву насіння, висівний апарат з cellular диском, котки, що накочуються, шлейф, і перед сошником встановлений пристрій ґрудковідведення. За сошником послідовно встановлений патрубок для введення в ґрунт порції активованих добрив і стимуляторів росту, який приєднаний до ємності для рідини та керованими від контролера керування електроклапаном і електронасосом активованих добрив й стимуляторів росту. Механізм регулювання жорсткості пружини колеса, що накочується, обід якого відповідає профілю борозни, та блок живлення. Згідно з корисною моделлю, в пристрій введені: розпушувач ґрунту; блок регулювання розпушувача ґрунту; ємність для води, з керованими від контролера електроклапаном води й електронасосом води, з'єднаних через додатковий патрубок до патрубка для введення в ґрунт порцій активованих добрив, стимуляторів росту й води; тепловізор з вбудованою в нього цифровою камерою, по тепловому полю якого визначають температуру й вологість орного поля та посівної борозни; датчик рівня насіння у висівному апараті; послідовний інтерфейс; 1 UA 84931 U 5 10 15 20 25 30 35 40 45 50 55 60 аналізатор, з'єднаний через інтерфейс з контролером керування і через відеоінтерфейс з тепловізором; вихід датчика рівня насіння у висівному апараті є входом контролера керування, який зв'язаний у двох напрямках з послідовним інтерфейсом, причому вихід контролера керування підключений до блока регулювання розпушувачем ґрунту. Для обробки і передачі цифрової інформації, яка надається тепловізором, в пристрій додатково введено аналізатор, що має в своєму складі: відеоінтерфейс; регістр зберіганнязсуву; блок визначення ступеня полінома; схему підключення кінцевих різниць; блоки множення; схему тимчасових коефіцієнтів Ньютона; елемент затримки; шину задання тимчасової точки, на яку необхідно здійснити прогноз похибки, причому вхід елемента затримки з'єднаний з останнім осередком регістра зберігання-зсуву, виходи якого є першими входами блока визначення ступеня полінома. Перший вихід блока визначення ступеня полінома є першим входом схеми тимчасових коефіцієнтів Ньютона і першим входом схеми підключення кінцевих різниць, другий вхід якої з'єднаний з першим виходом блока визначення ступеня полінома, а виходи схеми підключення кінцевих різниць є першими входами блоків множення. Другі входи блоків множення з'єднані з виходами схеми тимчасових коефіцієнтів Ньютона, другий вхід якої з'єднаний з шиною задання тимчасової точки прогнозування, яка з'єднана з першим виходом контролера, що призначений для керування відеоінтерфейсом, регістром зберігання-зсуву і блоком визначення ступеня полінома, з'єднаних між собою входами і підключених до другого його виходу, та обчислення прогнозу похибки з використанням блока похибки. Третій вихід контролера в двох напрямках підключений до входу блока пам'яті, вихід якого є першим входом блока аналізу і корекції, призначеного для обчислення і корекції повної похибки за заданим алгоритмом і підключений до входу інтерфейсу. Вихід інтерфейсу є інформаційними входами мультиплексора, а його адресні входи підключені до четвертого виходу контролера, у якого входи з'єднані з виходами блоків множення, причому другий вихід блока аналізу і корекції підключений до першого додаткового входу блока визначення ступеня полінома. Корисна модель пояснюється кресленнями. На фіг. 1 представлена схема здійснення посіву насіння просапних культур і внесення добрив (поперечний розріз борозни); на фіг. 2 - схема розміщення датчиків і робочих органів сівалки; на фіг. 3 - блок-схема підключення датчиків, елементів і робочих органів до контролера; на фіг. 4 - блок-схема аналізатора. Для здійснення посіву використовують серійну сівалку з будь-яким висівним апаратом 1, пристроєм ґрудковідведення 2 на незалежній підвісці, сошником 3, переднім і заднім катками 4, що накочуються, і пристроєм 5, який виштовхує насіння. У поєднані з насіннєпроводом для контролю висіву насіння використовується датчик висіву насіння 6. Механізм 9 регулює жорсткість пружини підвіски 7, глибину нарізання сошником 3 для подальшого закладення насіння у посівну борозну та забезпечення надалі загортання насіння в борозні ґрунтом з регульованим ущільненням ґрунту над рівчаком зусиллям колеса 8. Обід цього колеса виконаний за профілем борозни, на незалежній підвісці, яка з'єднана з механізмом регулювання жорсткості пружини 9, керованим в автоматичному режимі в залежності від вологості ґрунту, що дозволяє оптимізувати параметри розміщення насіння в борозні, загортання їх ґрунтом і польову схожість. Після того, як буде нарізана посівна борозна і тепловізором 25 будуть виміряні параметри ґрунтів орного поля і посівної борозни та по вологості ґрунту посівної борозни визначена його щільність і проведено її зрівняння із заданою, і якщо ця щільність не є оптимальною, то блок регулювання 21, в залежності від рівня щільності, включає на потрібну глибину розпушувач ґрунту 20. Далі у борозну закладаються насіння на відстані одне від одного в залежності від дійсного стану орного поля і посівної борозни та параметрів ґрунтів і додають через додатковий патрубок у патрубок 10 розраховану кількість води для забезпечення оптимальної вологості ґрунту і порцію активованих добрив і стимуляторів росту (рідини 14) на насіння у посівній борозні. Для цього використовуються дві ємності: 26 - з водою, а 13 - з рідиною 14. Подача води і рідини 14 із ємностей 26 і 13 забезпечується відповідно електронасосами 28 і 12 при відкриванні відповідних електроклапанів 27 і 11. У висівному апараті 1 встановлені два датчики: 16 - обертання висіваючого диска і 23 - рівня насіння, а сівалка має ланцюговий шлейф 15, призначений для шлейфування ґрунту над рівчаком. Прийняті наступні позначення відомих пристроїв: контролер керування 17; датчики: 16 - обертання висіваючого диска і 23 - рівня насіння; блоки: 18 - управління і 19 - живлення. Контролер керування 17 збирає інформацію з датчиків 6, 16 і 23, аналізатора 22 і блока керування 18, за допомогою якого вводяться норма висіву насіння, бажані параметри ґрунтів орного поля і посівної борозни, такі як температура, вологість і щільність тощо. Блок 19 забезпечує подачу напруги живлення на елементи автоматизованого пристрою, який реалізує пристрій для висіву насіння просапних культур і внесення добрив. 2 UA 84931 U 5 10 15 20 25 30 35 40 45 50 55 60 Сівалку оснащують новими елементами для здійснення заявленого пристрою: аналізатором 22, послідовним інтерфейсом 24, тепловізором 25 з вбудованою цифровою камерою і датчиком рівня насіння 23 у висівному апараті 1. Аналізатор 22 призначений для обробки цифрової інформації, яка надається тепловізором по командам контролера керування 17 і передача визначеної інформації аналізатором 22 контролера керування 17 для керування технологічним обладнанням сівалки. Послідовний інтерфейс 24 зв'язує та узгоджує роботу контролера керування 17 з іншими технологічними об'єктами, наприклад, с трактором. Тепловізор 25 з вбудованою цифровою камерою є безконтактним пристроєм визначення реального стану орного поля і посівної борозни та виміру у реальному часі їх параметрів: температури і вологості одночасно у декількох точках. Датчик 23 контролює рівень насіння у висівному апараті 1 для усунення пропусків насіння при висіванні, коли вони відсутні у апараті 1. Блок-схема аналізатора 22 містить: відеоінтерфейс 29, який використовується для зв'язку з тепловізором 25, регістр зберігання-зсуву 30, блоки: визначення ступеня полінома 31, похибки 38, пам'яті 39 і аналізу і корекції 40, контролер 37, мультиплексор 42, інтерфейс 41 і елемент затримки 35. Регістр зберігання-зсуву 30 призначений для тимчасового зберігання цифрової інформації, яка подається через відеоінтерфейс 29, у вигляді матриць пікселів про реальний стан орного поля і посівної борозни та їх значення температури і вологості. До блока похибки 38 входять блоки визначення ступеня полінома 31 і множення 33, схеми тимчасових коефіцієнтів Ньютона 34 з шиною завдання тимчасової точки 36, на яку необхідно здійснити прогноз похибки, та підключення кінцевих різниць 32. Використання блока похибки 38 дозволяє підвищити точність вимірювання параметрів за рахунок обчислення помилок, які виникають при переміщенні сівалки, наприклад, на великій швидкості. Вхід елемента затримки 35 з'єднаний з останнім осередком регістра зберігання-зсуву 30 для затримки цим елементом на деякий інтервал часу, необхідного для визначення блоком 31 ступеня полінома і результатів виконання операцій перемноження блоками 33. Тимчасові коефіцієнти Ньютона записуються і зберігаються в схемі 34. Результат множення кінцевих різниць з тимчасовими коефіцієнтами Ньютона з блока множення 33 одночасно з останнім значенням подаються на вхід контролера 37, на виході якого формується сигнал, що визначає прогнозоване значення виміряного сигналу з використанням формули Ньютона, яка екстраполюється. Прогнозоване значення виміряного сигналу з виходу контролера 37 по закінченні циклу записується в блок пам'яті 39. Блок аналізу і корекції 40 виконує обчислення і вносить корекцію повної помилки. В даному блоці відбувається аналіз величини та знаку помилки, і відповідно до цього здійснюється вибір моделі визначення помилки, тобто ступеня полінома в блоці визначення ступеня полінома 31. На підставі даних блока аналізу і корекції 40 контролер 37 розраховує прогнозоване значення параметра на задане число кроків по уточненій моделі помилки, яка визначається блоком 31, по сигналу контролера 37. Значення виміряних параметрів з регістра зберігання-зсуву 30 подаються у контролер 37, де вони обробляються з урахуванням помилок. Результати виміряних параметрів надходять через інтерфейс 41 у контролер керування 17. Запропонований пристрій функціонує наступним чином. Перед сівбою на сівалці попередньо задають потрібні вид насіння і норми його висіву, допустимі значення температури, вологості та щільності ґрунту орного поля і посівної борозни, початкову глибину борозни та норми витрат активованих добрив і стимуляторів росту. Пристрій автоматичного регулювання попередньо обчислює і встановлює необхідні відстані між насінинами в рядку за рахунок початкових заданих трактористом параметрів і зміни частоти обертання висівного диска секції сівалки. Одночасно з цим автоматично визначається і зміщення в сусідніх (суміжних) рядках на піввідстані між місцями розташування насінин. Крім того, шляхом переміщення висівних секцій одна до одної встановлюють відповідну ширину між сусідніми (суміжними) рядками (ширина міжрядь). Настроюють цифрову камеру, вбудовану у тепловізор 25. Роблять декілька знімків цифровою камерою і перевіряють по ним дійсний стан орного поля. Потім нарізують сошником 3 посівну борозну і виконують тепловізором 25 пробну інфрачервону термографію, по якій визначають правильність налаштувань тепловізора і перевіряють відповідність температурного поля поверхні ґрунтів орного поля і борозни в зоні висіву насіння за допомогою еталонних стандартних пристроїв, наприклад, вимірювачем вологості і температури типу DT-616CT. При необхідності вносяться відповідні коригування. Коректують похибки вимірювань після тестування і встановлюють на блоці керування 18 значення оптимальної вологості ґрунту, наприклад, 19 %. Засипають у насіннєвий ящик насіння, яке поступає у висівний апарат 1, в ємність 13 заливають рідину 14, наприклад, активованих добрив й стимуляторів росту, а у ємність 26 заливають воду. При пробному проїзді сівалки 3 UA 84931 U 5 10 15 20 25 30 35 40 45 50 55 тракторист перевіряє роботу датчиків обертання диска 16 і висіву насінин 6. Потім з блока керування 18 включається електроживлення електросхеми від блока 19. При роботі сівалки за допомогою датчиків, контролера та додаткових нових елементів здійснюються наступні операції: - ґрудковідведення пристроєм 2 перед сошником 3; - нарізання сошником 3 посівної борозни, з одночасним фотографуванням цифровою камерою тепловізора 25 стану орного поля і посівної борозни, вимірювання температури і вологості їх ґрунтів за допомогою тепловізора 25 і розрахунок контролером керування 17 щільності ґрунту у посівній борозні; - розпушування ґрунту посівної борозни, якщо щільність ґрунту відрізняється від оптимальної; - висів у посівну борозну насінин з одночасною реєстрацією відповідними датчиками висіву насінин, температури, вологості і щільності в зоні висіву насінин при наявності їх у висівному апараті, що контролюється за допомогою датчика 23; - після висіву насіння в посівну борозну автоматично вводяться порції води та рідини 14, в об'ємі, необхідному для максимальної польової схожості насіння, через патрубок 10 на висіяне насіння, якщо вологість ґрунту у борозні та навколо неї є відмінною від оптимальної; - загортання ґрунтом насінин методом обвалення ґрунту в посівну борозну ободом колеса 8 і ущільнення їх у борозні з оптимальним зусиллям, значення якого відповідає оптимальній вологості і щільності ґрунту у посівній борозні; - прикочування поверхні ґрунту з ущільненням посівної борозни по осі рядка і в захисних зонах катками 4 із оптимальним зусиллям, що визначається дійсним станом орного поля, з подальшим шлейфуванням і мульчуванням ґрунту шлейфом 15. Як відомо, температура ґрунтів орного поля і посівної борозни насамперед залежить від різних факторів, в першу чергу від географічного положення і висоти місця над рівнем моря, експозиції, фізико-механічних параметрів, тощо. На температуру ґрунту в значній мірі впливають також і властивості самого ґрунту: механічний склад, фізичні властивості, вологість, а також якість обробки (стан поверхні), рослинність на ній і т.д. Тому тепловізор 25, який є вимірюючим пристроєм й встановлений на сівалці, працює в інфрачервоній області електромагнітного спектра, "переводить" у видиму область спектра теплове випромінювання орного шару поля і посівної борозни, які випромінюють тепло. Тепловізор 25 з вбудованою цифровою камерою є багатофункціональним вимірювальним приладом. Так як посівне поле є джерелами теплового випромінювання, а ґрунт його випромінює за умови, що його температура вище абсолютного нуля, то це випромінювання являє собою інфрачервоні хвилі і вимірювальний прилад - тепловізор 25 "бачить" їх. Інфрачервоне випромінювання являє собою електромагнітне випромінювання в діапазоні довжин хвиль 0,8-14 мкм, які не можуть бути сприйняті людським оком. Тепловізор 25 - прилад, здатний вимірювати енергію інфрачервоного випромінювання, визначаючи температурне поле ділянок поверхні ґрунту в реальному часі, яке залежить від умов на поверхні і визначається ґрунтовими властивостями. Чим вище температура досліджуваного ґрунту, тим більше від нього відходить інфрачервоного випромінювання. Розподіл температури відображається на дисплеї (або в пам'яті) тепловізора 25 як кольорове поле, де певній температурі відповідає певний колір. Як правило, на дисплеї відображається діапазон температури, видимої в об'єктив поверхні. Використання тепловізора 25 дає можливість отримувати та зберігати інформацію про температурне поле орного шару поля. Чутливий елемент вимірювального приладу - матриця мініатюрних детекторів, сприймає інфрачервоні сигнали і перетворює їх в електричні імпульси, які після посилення перетворюються у відеосигнал, який обробляється спеціальним контролером, вбудованим у тепловізор 25. Відеосигнал з тепловізора 25 подається для обробки у аналізатор 22, в якому уточнюються значення виміряних температур. При цьому тепловізор 25 використовується не тільки як прилад для безконтактного виміру температури орного поля та борозни, але й для вимірювання вологості ґрунту на їх поверхнях, що дозволяє не тільки відображати місця з ризиком утворення вологи, але і безпосередньо вимірювати вологість на поверхні з відображенням значень на дисплеї тепловізора 25, або передавати ці параметри контролеру 17 для керування. У зазначеній моделі тепловізора 25, ця інформація записується в пам'ять, отримується через канал відеосигналу і подається для обробки у аналізатор 22. По результатах вологи ґрунтів контролер керування 17 обчислює щільність ґрунту в посівній борозні. Для цього у вбудованій пам'яті контролера керування 17 зберігається таблиця відповідності вологи ґрунту до щільності. Якщо обчислена контролером керування 17 щільність буде відрізнятися від заданої трактористом перед початком сівби, то за допомогою блока 4 UA 84931 U 5 10 регулювання 21 розпушувач ґрунту 20 виконує розпушення ґрунту у борозні. Цей процес повторюється доти, поки щільність не буде відповідати заданому значенню. Відомо, що структурні ґрунти, полегшуючи проникнення зовнішнього повітря, швидше прогріваються навесні, ніж безструктурні, а температура орного горизонту у весняний період визначає умови проростання сільськогосподарських культур. Тому використання тепловізора 25 разом з цифровою камерою, аналізатором 22 та контролером керування 17 із програмним забезпеченням дозволяє в режимі реального масштабу часу керувати подачею насіння у борозни. При цьому враховуються задані трактористом перед виконанням посівних робіт значення типу і норми висіву насіння, температури, вологості і щільності ґрунтів, які вводяться за допомогою блока керування 18. Ці дані за допомогою контролера керування 17, порівнюються з виміряними параметрами, що були оброблені й уточнені в аналізаторі 22. Якщо вони є задовільними, то виконується посів насіння на потрібну глибину. Використання аналізатора дозволяє підвищити точність вимірювання, яке досягається за рахунок обчислення повної помилки, яка визначається за наступним висловом: Пi, j 15 20 Пcn 3 Dm Di Dj (1) , де Пcn - постійна складова помилки вимірювань; Dm - дисперсія помилки вимірювання, величина постійна, що залежить від числа вимірювань і кроків обчислень; D i - дисперсія помилки вимірювання і-ї моделі, яка обчисляється для заданого числа вимірювань і числа кроків обчислень; D j - дисперсія помилки вимірювання j-ї моделі, яка має постійне значення при заданому числі вимірювань і кроків обчислень. Постійна помилка прогнозу Пcn визначається за формулою: (2) Пcn k з n 1bi y i , i де k з - коефіцієнт зміщення; b - ваговий коефіцієнт, який має постійне значення і залежний від кількості вимірювань; 25 30 35 yi - виміряні значення параметра. На підставі отриманих значень повного прогнозу вимірюваної величини здійснюється вибір і визначення ступеня полінома виразу, який апроксимується (блок 31), а також виконуються обчислення прогнозованого значення параметра. Попередня оцінка прогнозу перед обчисленням значення параметра (температури, вологості) дозволяє скоригувати постійну і повну помилки виміру, що забезпечує підвищення точності. Аналізатор 22 працює таким чином. З другого виходу контролер 37 по шині подає керуючий сигнал на відеоінтерфейс 29 і регістр зсуву 30. У регістр 30 записуються n вузлових значень дискретного сигналу y0 yn з матриці пікселів тепловізора 25, які подаються через відеоінтерфейс 29. Потім ці значення по сигналу з другого керуючого виходу контролера 37 переписуються в блок визначення ступеня полінома 31, в якому ступінь полінома обчислюється на основі застосування методу кінцевих різниць (схема 32). Кінцеві різниці визначаються таким чином: yn yn yn1 ; 2 y n y n y n 1 ; 3 yn 2 yn 2 yn 1 k 40 k 1 ; k 1 (3) y n y n y n 1; Після визначення ступеня полінома блоком 31 з його другого додаткового виходу подається сигнал на схему тимчасових коефіцієнтів Ньютона 34, для підключення необхідної кількості коефіцієнтів x n і на схему підключення кінцевих різниць 32 для підключення необхідної кількості значень різниць ky n . Одночасно з подачею сигналу, що визначає значення ступеня полінома, на схему тимчасових коефіцієнтів Ньютона 34 по сигналу з першого керуючого виходу контролера 37 по шині 36 подається тимчасова точка прогнозу h1. Якщо, наприклад, ступінь полінома відповідає двом, тоді відбувається підключення останніх 5 UA 84931 U 5 10 15 20 2 двох значень кінцевих різниць y n 1 і y n2 , які одночасно з тимчасовими коефіцієнтами Ньютона x1 і x 2 подаються на блоки множення 27n і 27 n-1. Тимчасові коефіцієнти Ньютона визначаються заздалегідь за алгоритмом, відповідному наступною узагальненою формулою: 1 k (4) x k Пn 1 ( t 1 k ) n k! , h t де t 1 n - число кроків; t t - інтервал вимірювання дискретних значень сигналу; k - ступінь полінома; h1 - тимчасова точка, на яку необхідно отримати значення; tn - момент часу. Тимчасові коефіцієнти Ньютона x k записуються і зберігаються в блоці 34. Потім результат множення кінцевих різниць з тимчасовими коефіцієнтами Ньютона з блока множення 33 одночасно з останнім значенням y n , затриманим елементом затримки 35 на інтервал t (часу визначення ступеня полінома і результатів виконання операцій перемноження), подаються на вхід контролера 37, який обчислює уточнене значення параметра з використанням екстраполяції формули Ньютона: Py yn x1yn1 x 22yn2 ... xny0 (5) ; x1 , x 2 … x n - тимчасові коефіцієнти Ньютона; де y 0 , y1...yn - дискретні значення сигналу, отримані в певні моменти часу контролю; y n 1 ,і 2 y n 2 , ... , n y 0 - кінцеві різниці. Уточнене значення параметра Py з третього виходу контролера 27 записується в блок пам'яті 39 і одночасно переноситься у блок аналізу і корекції 40, який виконує обчислення і корекцію повної помилки параметра Пi, j за виразом (1). В даному блоці відбувається аналіз величини та знаку помилки, і відповідно до цього здійснюється вибір значення параметру, тобто ступеня полінома в блоці визначення ступеня полінома 31. Якщо Пi Пcn 3 Dm Di Dj 1, то контролер 37 видає сигнал в блок 31 на обчислення по і-му поліному. Якщо 25 30 35 40 45 Пj Пcn 3 Dm Di Dj 1, то контролер 37 видає сигнал в блок 31 на обчислення по j-му поліному. На підставі даних блока аналізу і корекції 34, контролер 37 розраховує прогнозоване значення параметра на задане число кроків по уточненій моделі прогнозування, яка визначається блоком визначення ступеня полінома 31 згідно виразу (5), по сигналу контролера 37, зрівнюючи з даними регістра-зсуву 30. Результати надходять на інтерфейс 35. Через інтерфейс 41 контролер керування 17 подає управляючі сигнали на інформаційні входи мультиплексора 42 на вимір параметрів: дійсного стану поля, температури або вологості ґрунтів орного поля або посівної борозни. При цьому контролер 37 формує відповідні адреси, подаючи коди на адресні входи мультиплексора 42, в результаті одна із команд проходить на вхід контролера 37 для виконання. Таким чином, оцінка помилки дозволяє вибрати необхідний ступінь апроксимації, зробити уточнений розрахунок виміряного значення параметра, тим самим підвищити точність його значення і досягти необхідного технічного результату. При реалізації аналізатора 22 в якості контролера 37 і контролера керування 17 можливо використовувати програмовані мікропроцесорні контролери ATmega128 (фірми Atmel, США), а як датчик рівня насіння 23 у висівному апараті 1 - безконтактний ультразвуковий датчик для вимірювання рівня UP30 німецької компанії SICK AG. Модернізована структурна схема дозволить підвищити врожайність висіяного насіння за рахунок більш якісного припосівного розподілу насіння і добрив у ґрунті та дозволяє виконувати сівбу насіння при нестачі продуктивної вологи на глибині загортання насіння, в агротехнічні строки, у вологий ґрунт на глибину, що гарантує оптимальну густоту сходів. 6 UA 84931 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 35 40 1. Пристрій для висіву насіння просапних культур і внесення добрив, що включає: сошник, насіннєпровід, що висіває, з поєднаним з ним датчиком висіву насіння, висівний апарат з cellular диском, котки, що накочуються, шлейф, і перед сошником встановлений пристрій ґрудковідведення, а за сошником послідовно встановлений патрубок для введення в ґрунт порції активованих добрив і стимуляторів росту, який приєднаний до ємності для рідини та керованими від контролера керування електроклапаном і електронасосом активованих добрив й стимуляторів росту та механізмом регулювання жорсткості пружини колеса, що накочується, обід якого відповідає профілю борозни, а виходи датчиків обертання висівного диска та висіву насінин і пульта керування є входами контролера керування, і блок живлення, який відрізняється тим, що додатково введені розпушувач ґрунту, блок регулювання розпушувача ґрунту, ємність для води з керованими від контролера електроклапаном води й електронасосом води, з'єднаних через додатковий патрубок до патрубка для введення в ґрунт порцій активованих добрив, стимуляторів росту й води, тепловізор з вбудованою в нього цифровою камерою, по тепловому полю якого визначають температуру й вологість орного поля та посівної борозни, датчик рівня насіння у висівному апараті, послідовний інтерфейс, аналізатор, з'єднаний через інтерфейс з контролером керування і через відеоінтерфейс з тепловізором з вбудованою в нього цифровою камерою, а вихід датчика рівня насіння у висівному апараті є входом контролера керування, який зв'язаний у двох напрямках з послідовним інтерфейсом, причому вихід контролера керування підключений до блока регулювання розпушувачем ґрунту. 2. Пристрій за п. 1, який відрізняється тим, що в нього інтегровано аналізатор, який містить відеоінтерфейс, регістр зберігання-зсуву, блок визначення ступеня полінома, схему підключення кінцевих різниць, блоки множення, схему тимчасових коефіцієнтів Ньютона, елемент затримки, шину задання тимчасової точки, на яку необхідно здійснити прогноз похибки, причому вхід елемента затримки з'єднаний з останнім осередком регістра зберігання-зсуву, виходи якого є першими входами блока визначення ступеня полінома, перший вихід якого є першим входом схеми тимчасових коефіцієнтів Ньютона і першим входом схеми підключення кінцевих різниць, другий вхід якої з'єднаний з першим виходом блока визначення ступеня полінома, а виходи схеми підключення кінцевих різниць є першими входами блоків множення, другі входи яких з'єднані з виходами схеми тимчасових коефіцієнтів Ньютона, другий вхід якої з'єднаний з шиною задання тимчасової точки прогнозування, яка з'єднана з першим виходом контролера, який призначений для керування відеоінтерфейсом, регістром зберігання-зсуву і блоком визначення ступеня полінома, з'єднаних між собою входами і підключених до другого його виходу, та обчислення прогнозу похибки з використанням блока похибки, а третій вихід контролера в двох напрямках підключений до входу блока пам'яті, вихід якого є першим входом блока аналізу і корекції, призначеного для обчислення і корекції повної похибки за заданим алгоритмом, що підключено до входу інтерфейсу, вихід якого є інформаційними входами мультиплексора, а його адресні входи підключені до четвертого виходу контролера, у якого входи з'єднані з виходами блоків множення, причому другий вихід блока аналізу і корекції підключений до першого додаткового входу блока визначення ступеня полінома. 7 UA 84931 U 8 UA 84931 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Автори англійськоюNazarenko Volodymyr Mykhailovych
Автори російськоюНазаренко Владимир Михайлович
МПК / Мітки
МПК: A01C 7/00
Мітки: пристрій, внесення, культур, висіву, насіння, просапних, добрив
Код посилання
<a href="https://ua.patents.su/11-84931-pristrijj-dlya-visivu-nasinnya-prosapnikh-kultur-i-vnesennya-dobriv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для висіву насіння просапних культур і внесення добрив</a>
Спосіб сівби просапних культур і внесення добрив
Номер патенту: 84925
Опубліковано: 11.11.2013
Автори: Лобов Вячеслав Йосипович, Дубовик Ігор Ігорович, Назаренко Володимир Михайлович
МПК: A01C 7/00
Мітки: добрив, просапних, сівби, культур, внесення, спосіб
Формула / Реферат:
1. Спосіб посіву просапних культур і внесення добрив, що включає формування посівної борозни і висів у неї насіння з одночасним вимірюванням вологості ґрунту на глибині висіву насіння, закриття насіння в борозні ґрунтом, подальше ущільнення і шлейфування ґрунту над рівчаком, який відрізняється тим, що при сівбі додатково в реальному часі перед формуванням посівної борозни визначають цифровою камерою дійсний стан орного поля і виконують його...
Двоярусний спосіб висіву насіння та внесення добрив
Номер патенту: 72233
Опубліковано: 10.08.2012
Автор: Шведик Микола Степанович
МПК: A01C 7/00
Мітки: внесення, двоярусний, спосіб, добрив, висіву, насіння
Формула / Реферат:
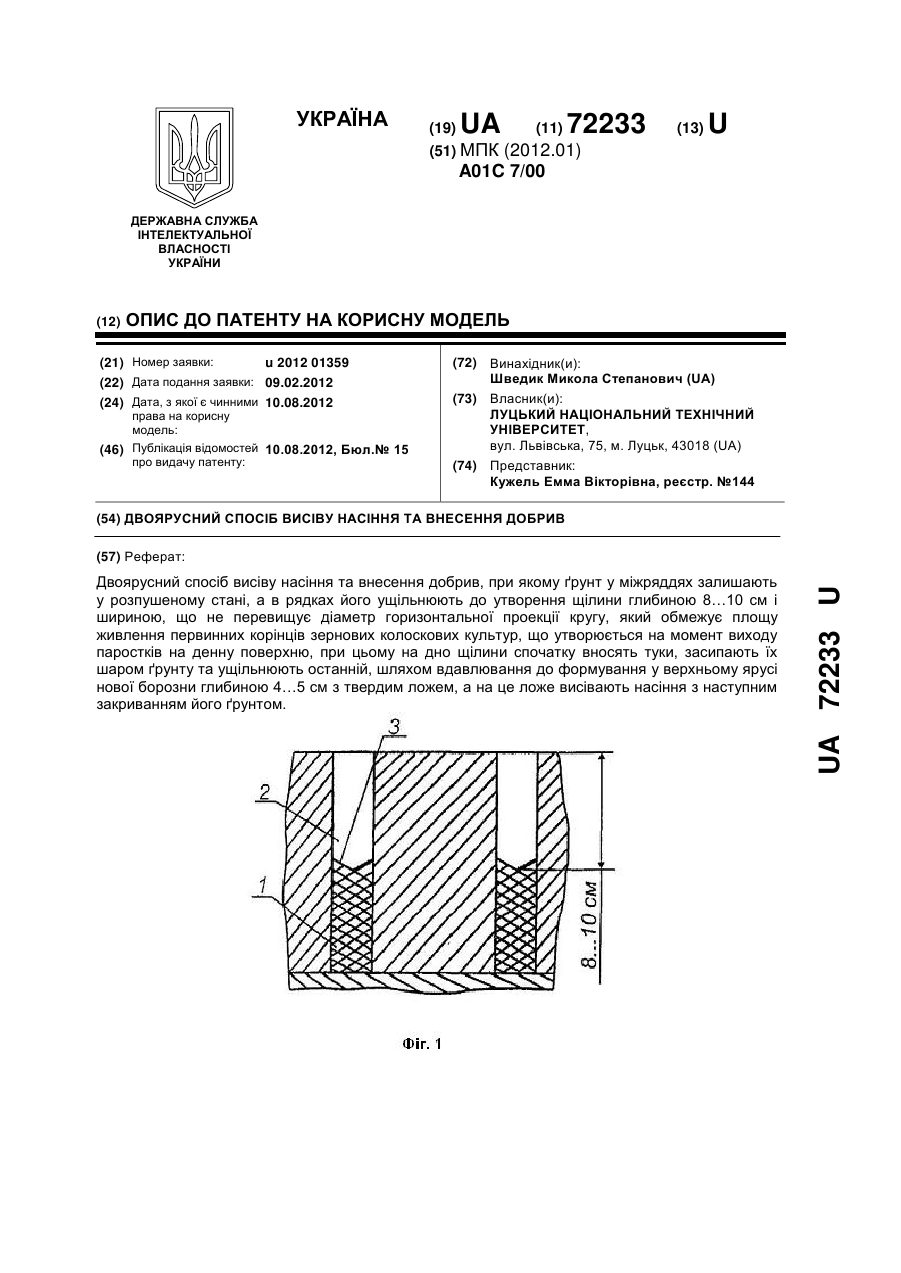
Двоярусний спосіб висіву насіння та внесення добрив, що включає формування двох рівнів посівних лож, розподіл на них насіння та добрив з наступним загортанням шаром ґрунту, який відрізняється тим, що ґрунт у міжряддях залишають у розпушеному стані, а в рядках його ущільнюють до утворення щілини глибиною 8…10 см і шириною, що не перевищує діаметр горизонтальної проекції кругу, який обмежує площу живлення первинних корінців зернових колоскових...
Комбінована машина для внесення мінеральних добрив і висіву насіння розкидним способом
Номер патенту: 57932
Опубліковано: 15.06.2004
Автор: Адамчук Валерій Васильович
МПК: A01C 7/08
Мітки: насіння, висіву, способом, внесення, комбінована, добрив, машина, розкидним, мінеральних
Формула / Реферат:
Комбінована машина для внесення мінеральних добрив і висіву насіння розкидним способом, що включає кузов для добрив з живильником тягового типу, бункер для насіння з висівним апаратом, встановлений над вихідною частиною живильника, і розсіваючий орган, яка відрізняється тим, що над живильником встановлена дозувальна заслінка добрив, а висівний апарат розміщений поперек напрямку руху тягового органа живильника, при цьому робоча ширина захвату...
Спосіб внесення добрив та сівби просапних культур
Номер патенту: 92554
Опубліковано: 10.11.2010
Автор: Білоконь Олександр Петрович
МПК: A01C 7/00
Мітки: сівби, просапних, внесення, культур, добрив, спосіб
Формула / Реферат:
Спосіб внесення добрив та сівби просапних культур, який включає передпосівний обробіток ґрунту, різнорівневе формування посівних лож та роздільний розподіл по їх поверхні рідких добрив та насіння з подальшим загортанням шаром ґрунту, який відрізняється тим, що разом з висівом насіння виконують різноглибинне розпушування міжрядь переміжними смугами та формують з одного боку ближче до осі кожної насіннєвої борозенки мілкіші, а далі від неї з...
Спосіб посіву насіння просапних культур і пристрій для його здійснення
Номер патенту: 23165
Опубліковано: 19.05.1998
Автори: Радзієвський Леонід Леонідович, Іванько Іван Павлович, Шило Валерія Сергіївна, Шмат Сергій Іванович
МПК: A01C 7/00
Мітки: просапних, насіння, спосіб, посіву, здійснення, пристрій, культур
Формула / Реферат:
Спосіб посіву насіння просапних культур, який включає поверхневий обробіток грунту і посів насіння просапними сівалками, який відрізняється тим, що одночасно з посівом насіння проводять поверхневий обробіток зони рядка з відгортанням лапами-відвальниками поверхневого прошарку грунту глибиною 4-8 см І шириною 10-16 см,2, Спосіб посіву по п. 1, який відрізняється тим, що для боротьби з бур'янами без застосування гербіцидів одночасно з...