Високоефективний силовий перетворювач і модулятор та передавач з його використанням

Формула / Реферат
1. Силовий перетворювач, пристосований для підключення до джерела електричного струму і для керування потоком енергії від зазначеного джерела до навантаження, цей перетворювач отримує на своєму вході керуючий сигнал A(t) для перетворення і має перший регулювальний контур (L1, С1, М1, D1) широтно-імпульсної модуляції кроково-знижувального типу, який пристосований для підключення до позитивного джерела напруги (Vсс), який відрізняється тим, що також має
контур рекуперації енергії, що має другий регулювальний контур (L2, М2, D2) широтно-імпульсної модуляції кроково-підвищувального типу, підключений до зазначеного першого регулювального контуру (L1, С1, М1, D1), який пристосований до розрядки енергонакопичувальних компонентів (L1, С1) зазначеного першого регулювального контуру (L1, С1, М1, D1); і
блок (UC) керування для перемикання компонентів (М1, М2) першого (L1, С1, М1, D1) та другого (L2, М2, D2) регулювальних контурів, який настроєний на керування перемиканням зазначених компонентів (М1, М2) залежно від зазначеного керуючого сигналу A(t) у відповідності до методу керування, що базується на аналітичній моделі зазначеного першого регулювального контуру (L1, С1, М1, D1).
2. Силовий перетворювач за п. 1, який відрізняється тим, що зазначений другий регулювальний контур (L2, М2, D2) пристосований для підключення до негативного джерела напруги (Vdd) для швидкої розрядки енергонакопичувальних компонентів (L1, С1) зазначеного першого регулювального контуру (L1, С1, М1, D1).
3. Силовий перетворювач за п. 1 або п. 2, в якому компонент (М1) першого регулювального контуру перемикають сигналом з першого робочого циклу (Dс), компонент (М2) другого регулювального контуру перемикають сигналом з другого робочого циклу (Ds), а блок (UC) керування настроєний на визначення зазначених робочих циклів (Dc, Ds) таким чином, що вони не перекриваються у часі.
4. Силовий перетворювач за п. 3, в якому зазначений блок (UC) керування настроєний на періодичне встановлення ширини (Dc, Ds) імпульсів перемикання у кожному циклі перемикання.
5. Силовий перетворювач за п. 4, який відрізняється тим, що зазначений блок (UC) керування настроєний на встановлення ширини (Dc, Ds) імпульсів перемикання також залежно від попереднього щонайменше зазначеного першого регулювального контуру (L1, С1, М1, D1), зокрема від його стану у попередньому циклі перемикання.
6. Силовий перетворювач за будь-яким з пунктів з 3-го до 5-го, який відрізняється тим, що зазначений блок (UC) керування пристосований для використання стохастичних і змінних у часі коливань для перемикання зазначених компонентів контуру.
7. Силовий перетворювач за п. 1, в якому вхід зазначеного другого регулювального контуру (L2, М2, D2) підключений до виходу зазначеного першого регулювального контуру (L1, С1, М1, D1) і в якому вихід зазначеного другого регулювального контуру (L2, М2, D2) підключений до входу зазначеного першого регулювального контуру (L1, С1, М1, D1).
8. Силовий перетворювач за будь-яким з попередніх пунктів, який відрізняється тим, що він має фільтрувальний засіб (F), підключений після зазначеного першого регулювального контуру (L1, С1, М1, D1) і пристосований для фільтрування шумів перемикання.
9. Силовий перетворювач за п. 8, який відрізняється тим, що зазначений фільтрувальний засіб (F) є складеним селективним фільтром.
10. Силовий перетворювач за будь-яким з попередніх пунктів, який відрізняється тим, що він має засіб (ADC) аналого-цифрового перетворення, пристосований для визначення щонайменше деяких перемінних (І1, V0) стану зазначеного першого регулювального контуру (L1, С1, М1, D1), а також тим, що зазначений блок (UC) керування підключений до зазначеного засобу (ADC) визначення і пристосований до роботи згідно з методом управління, що базується на аналітичній моделі зазначеного першого регулювального контуру (L1, С1, М1, D1), який враховує визначені величини перемінних (І1, V0) стану.
11. Силовий перетворювач за будь-яким з попередніх пунктів, який відрізняється тим, що має засіб (ADC) визначення, пристосований для розпізнавання вихідної напруги (Vout) на перетворювачі і навантаження (RL), прикладеного на виході перетворювача, і в якому зазначений блок (UC) керування підключений до зазначеного засобу (ADC) визначення і пристосований до роботи згідно з методом управління, що базується на аналітичній моделі зазначеного першого регулювального контуру (L1, С1, М1, D1), який враховує визначену вихідну напругу (Vout) і визначене навантаження (RL) на виході.
12. Силовий перетворювач за п. 11, в якому зазначений засіб (ADC) визначення пристосований для вимірювання вихідної напруги (Vout) перетворювача та вихідного струму (І0) перетворювача.
13. Силовий перетворювач за одним з попередніх пунктів, який відрізняється тим, що він пристосований до потужності навантаження або приводу будь-якого типу.
14. Амплітудний модулятор, що пристосований для сприйняття модулюючого сигналу на вході і має підсилювач та живильний пристрій, який відрізняється тим, що зазначений живильний пристрій містить силовий перетворювач згідно з одним з попередніх пунктів, в якому керуючий перетворенням сигнал A(t) відповідає зазначеному модулюючому сигналу.
15. Радіопередавач, що включає амплітудний модулятор згідно з попереднім пунктом.
Текст
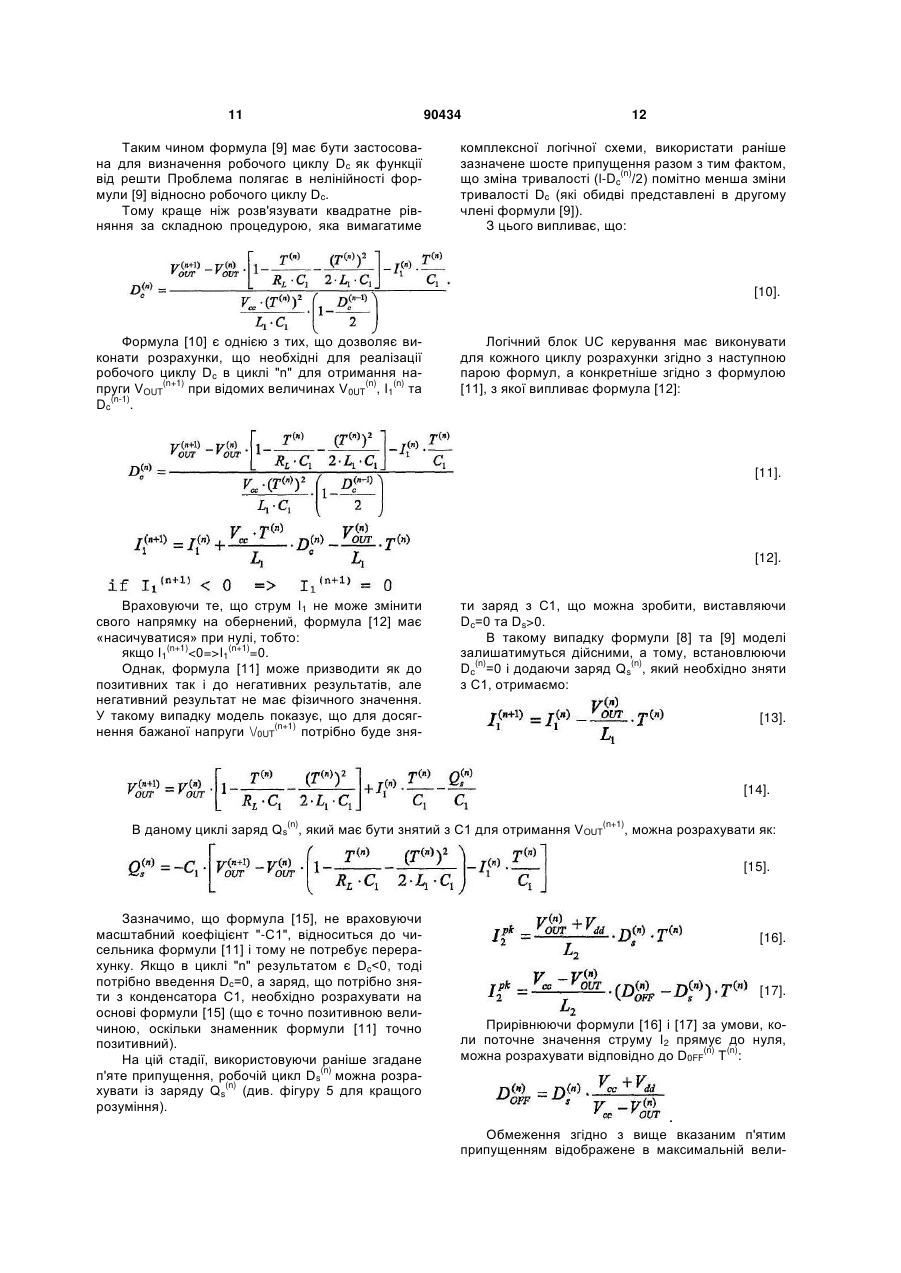
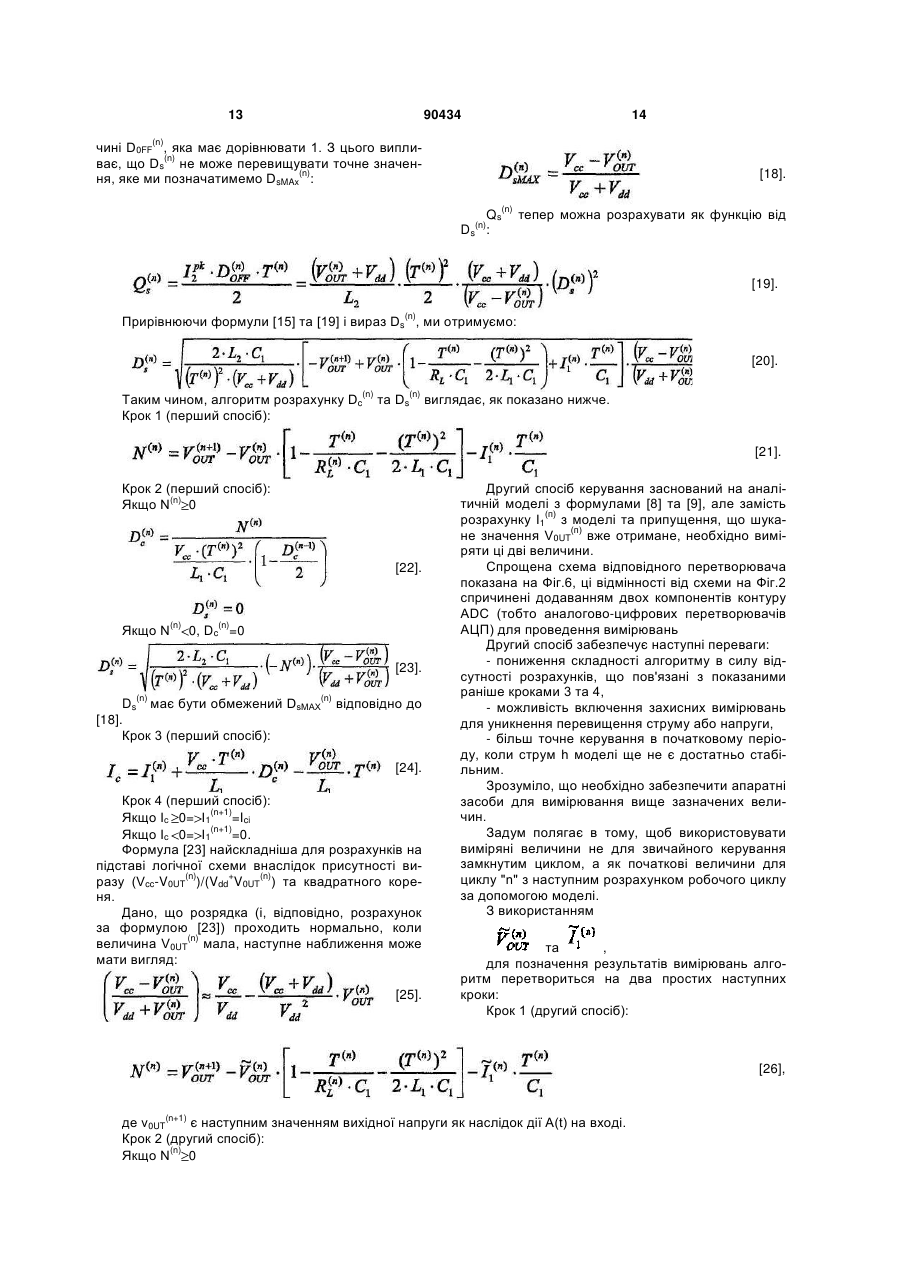
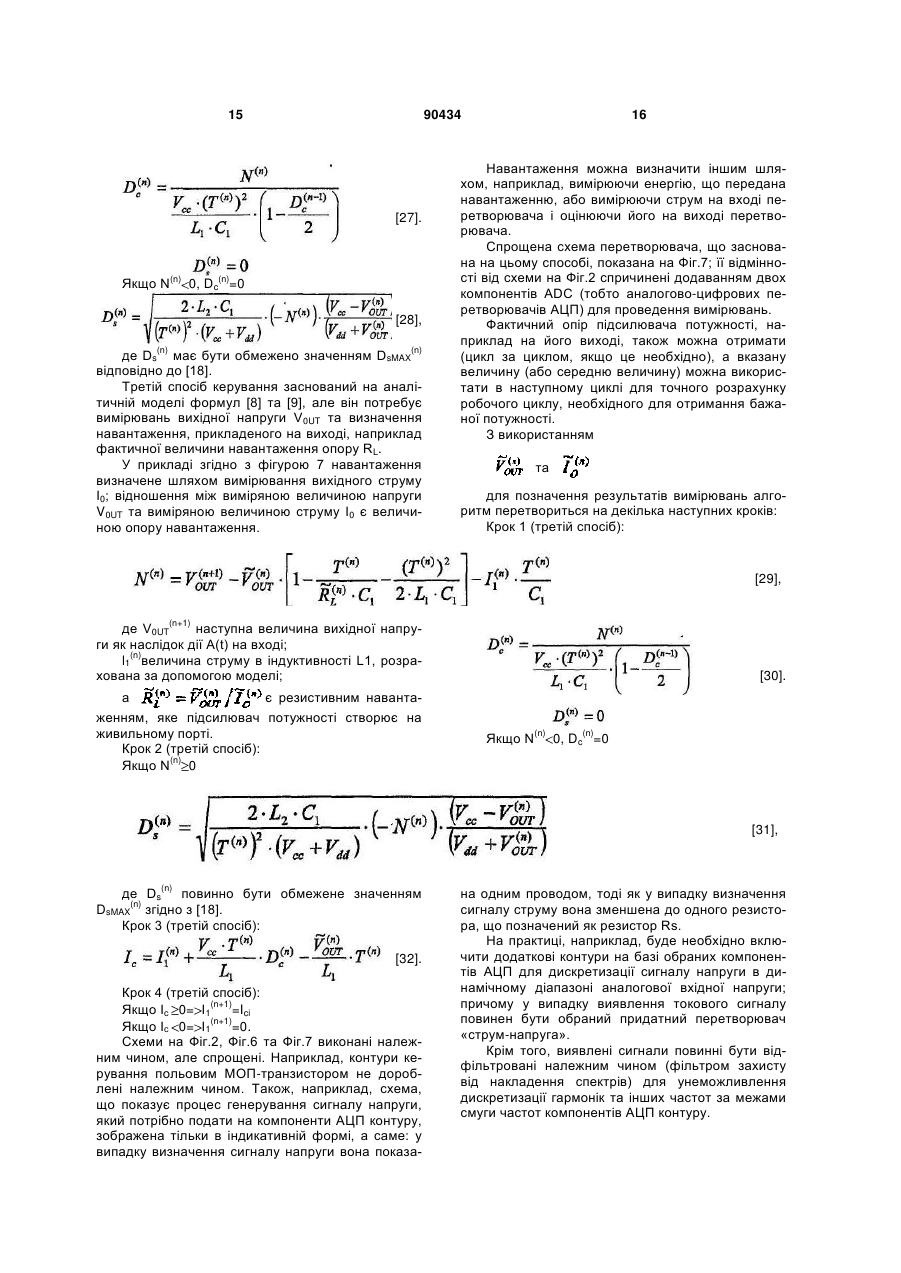
1. Силовий перетворювач, пристосований для підключення до джерела електричного струму і для керування потоком енергії від зазначеного джерела до навантаження, цей перетворювач отримує на своєму вході керуючий сигнал A(t) для перетворення і має перший регулювальний контур (L1, С1, М1, D1) широтно-імпульсної модуляції кроково-знижувального типу, який пристосований для підключення до позитивного джерела напруги (Vсс), який відрізняється тим, що також має контур рекуперації енергії, що має другий регулювальний контур (L2, М2, D2) широтно-імпульсної модуляції кроково-підвищувального типу, підключений до зазначеного першого регулювального контуру (L1, С1, М1, D1), який пристосований до розрядки енергонакопичувальних компонентів (L1, С1) зазначеного першого регулювального контуру (L1, С1, М1, D1); і блок (UC) керування для перемикання компонентів (М1, М2) першого (L1, С1, М1, D1) та другого (L2, М2, D2) регулювальних контурів, який настроєний на керування перемиканням зазначених компонентів (М1, М2) залежно від зазначеного керуючого сигналу A(t) у відповідності до методу керування, що базується на аналітичній моделі зазначеного першого регулювального контуру (L1, С1, М1, D1). 2. Силовий перетворювач за п.1, який відрізняється тим, що зазначений другий регулювальний контур (L2, М2, D2) пристосований для підключення до негативного джерела напруги (Vdd) для швидкої розрядки енергонакопичувальних компонентів 2 (19) 1 3 90434 4 яких перемінних (І1, V0) стану зазначеного першого регулювального контуру (L1, С1, М1, D1), а також тим, що зазначений блок (UC) керування підключений до зазначеного засобу (ADC) визначення і пристосований до роботи згідно з методом управління, що базується на аналітичній моделі зазначеного першого регулювального контуру (L1, С1, М1, D1), який враховує визначені величини перемінних (І1, V0) стану. 11. Силовий перетворювач за будь-яким з попередніх пунктів, який відрізняється тим, що має засіб (ADC) визначення, пристосований для розпізнавання вихідної напруги (Vout) на перетворювачі і навантаження (RL), прикладеного на виході перетворювача, і в якому зазначений блок (UC) керування підключений до зазначеного засобу (ADC) визначення і пристосований до роботи згідно з методом управління, що базується на аналітичній моделі зазначеного першого регулювального контуру (L1, С1, М1, D1), який враховує визначену вихідну напругу (Vout) і визначене навантаження (RL) на виході. 12. Силовий перетворювач за п.11, в якому зазначений засіб (ADC) визначення пристосований для вимірювання вихідної напруги (Vout) перетворювача та вихідного струму (І0) перетворювача. 13. Силовий перетворювач за одним з попередніх пунктів, який відрізняється тим, що він пристосований до потужності навантаження або приводу будь-якого типу. 14. Амплітудний модулятор, що пристосований для сприйняття модулюючого сигналу на вході і має підсилювач та живильний пристрій, який відрізняється тим, що зазначений живильний пристрій містить силовий перетворювач згідно з одним з попередніх пунктів, в якому керуючий перетворенням сигнал A(t) відповідає зазначеному модулюючому сигналу. 15. Радіопередавач, що включає амплітудний модулятор згідно з попереднім пунктом. Цей винахід відноситься до силових перетворювачів, як зазначено у заголовку першого пункту формули винаходу. Такий перетворювач зазвичай використовують у амплітудних модуляторах для радіопередавачів, а також даний винахід відноситься до амплітудних модуляторів та радіопередавачів. Взагалі, такий перетворювач може бути використаний, наприклад, в разі необхідності ефективного регулювання або зміни сили струму та керування нею аналоговим або цифровим сигналом. Звичайний підхід до виготовлення радіопередавача, придатного для забезпечення модуляцій кожного типу (аналогових і/або цифрових), базується на використанні (Картезіанського) модулятора з низьким рівнем I-Q разом з високочастотним підсилювачем класу А, що не дозволяє забезпечити високу ефективність Дійсно, звичайна ефективність при такому рішенні менша за 50%. Цю проблему можна вирішити, використовуючи полярний модулятор (Видалення ι Відновлення Обвідної Сигналу), як схематично показано на Фіг.1 Цей модулятор у режимі сканування отримує на своєму вході модулюючий сигнал SM, розділений, наприклад, цифровим процесором обробки сигналів DSP, на амплітуду A(t) модулюючого сигналу ι фазу Φ(t) модулюючого сигналу, та подає на свій вихід амплітудно-модульований високочастотний сигнал RF, тобто X(t)=A(t)·cos (ωοt+Φ(t)). Такий полярний модулятор згідно з Фіг.1 має: - фазове модулювання, що відповідно виконує синтезатор SYNT, - підсилення сигналу, який генерований синтезатором SYNT, за допомогою ланцюга високочастотних підсилювачів AMP енергії у насиченому класі (класи АВ, В, С, D, Ε або F) для забезпечення високої ефективності на радіочастотах, - модулювання обвідної, тобто амплітуди, за допомогою силового перетворювача СР шляхом варіювання електричної напруги на останньому каскаді високочастотного підсилювача. Модулятор обвідної керує майже всією енергією, що споживає передавач, це дуже важливо оскільки його ефективність дуже велика Крім того, модулятор обвідної повинен подавати на останній каскад підсилювача змінювану електричну напругу, що має динамічний діапазон, встановлений модульованим сигналом A(t). Забезпечення модуляцій амплітуди шляхом змінення подачі електричної напруги на останній каскад підсилювача відоме щонайменше 70 років, їі часто називали «анодною модуляцією» та забезпечували за допомогою модуляційного перетворювача (див, наприклад, «Radio Engineers Handbook», McGraw Hill, 1943). Можливість використання амплітудного модулятора за допомогою кроково-знижувального модуляційного широтно-імпульсного регулятора, тобто "ШІМ-регулятора", виключаючи таким чином модуляційний трансформатор, була представлена наприкінці 1960-х років. Нині це загальновідомо як із наукової літератури (див., наприклад, "Polar Modulation-Based RF Power Amplifiers with Enhanced Envelope Processing Technique" by J.K. Jau, F.Y. Han, M.С Du, T.S. Horng, Т.С Lin at the 34th European Microwave Conference, Amsterdam, 2004), так і із патентної документації (див., наприклад, патенти US 3,413,570, US 3,506,920, US 3,588,744, US 4,896,372). Взагалі, підхід, запропонований в такій літературі, завжди передбачає використання кроковознижувального регулятора для керування силовим підсилювачем радіочастот в класах АВ, В, С, D, Ε або F або інших «насичених» класах шляхом варіювання його живильної напруги. Подальший розвиток був запропонований у 1999 році в патенті US 6,636,112, в якому до каскаду з кроково-знижувальним ШІМ-регулятором 5 був доданий лінійний регулятор, який мав дві функції: а) відслідковувати найшвидшу динаміку сигналу, усуваючи недоліки ШІМ-регулятора, що описані нижче у даному документі, та б) зменшувати шум, що виникає при перемиканнях ШІМ-регулятора, які зазвичай підсилюють шумові компоненти переданого сигналу (див., патент US 6,636,112, колонка 8, рядки від 34 до 39). Такий лінійний регулятор знижує загальну ефективність всієї системи, оскільки, за своєю природою, він розсіює деяку кількість енергії, поданої ШІМ-регулятором (див. патент US 6,636,112, колонка 9, рядки від 7 до 13). В патенті US 6,636,112 (див. колонку 8, рядки від 1 до 14) висловлене припущення, що опір проявляється на останньому каскаді за умови стабільності його живильного порту. Головною метою запропонованого винаходу є усунення або зменшення недоліків попереднього рівня техніки. Ця мета досягнута силовим перетворювачем, який має ознаки, вказані в доданій формулі винаходу, що має розглядатися як невід'ємна частина цього опису. Запропонований винахід базується на ідеї рекуперації акумульованого на виході надлишку енергії з використанням придатного контуру, зокрема, передачею його на вхід. Інший інноваційний аспект запропонованого винаходу може бути оцінений на підставі тверджень з колонки 8, рядків від 1 до 14 у патенті US 6,636,112, де висловлене припущення, що опір проявляється на останньому каскаді за умови стабільності його живильного порту. Таке твердження є вірним лише за умови довершено узгоджених навантажень і якщо напруга, яка подана на останній каскад для отримання бажаної потужності, відповідатиме фундаментальним, з точки зору зазначеного патенту, успішним розрахункам незалежно від будь-яких обставин. В технічному рішенні згідно з запропонованим винаходом немає такого обмеження, а тому спосіб керування дає змогу розраховувати (цикл за циклом) робочій цикл для реалізації (з метою забезпечення напруги, що повинна бути прикладена до останнього каскаду) навіть за наявності підсилювача потужності, опір якого, що проявляється на живильному порту, є змінним. Тому фактичний опір підсилювача потужності може бути виміряний (цикл за циклом), а його величину (або його середнє значення) можна використати у наступному циклі У цьому винаході помітно неузгоджені або змінні навантаження також можна скорегувати (шляхом вдосконалення оригінального способу керування) Далі винахід детальніше описаний з посиланнями на додані креслення, які призначені лише як пояснюючі але не обмежуючі приклади, де Фіг.1 показує блок-схему передавача з амплітудною модуляцією, Фіг.2 показує спрощену схему першого прикладу апаратної реалізаціїперетворювача згідно з винаходом, 90434 6 Фіг.3А показує можливий напрямок вектора на I-Q графіку, Фіг.3В показує, як амплітуда вектора з фігури 3А змінюється з часом та відповідною вихідною напругою перетворювача, Фіг.4 показує, як електричний струм h змінюється згідно з формулою [3] та як напруга V0UT змінюється згідно з другим припущенням, відносно якого аналітична модель цього винаходу базується на формулі [4], Фіг.5 показує можливий шлях, згідно з яким струм І2 може змінюватись, ι асоційований з ним інтеграл Qs, розрахований за формулою [19], Фіг.6 показує спрощену схему другого прикладу апаратної реалізації перетворювача згідно з винаходом, та Фіг.7 показує спрощену схему третього прикладу апаратної реалізації перетворювача згідно з винаходом. Для досягнення високої ефективності у перетворювачі згідно з винаходом використана ШІМтехнолопя модуляції тривалості сигналу, як показано на Фіг.2, Фіг.6 та Фіг.7. Один з інноваційних кроків цього винаходу - це комбінування двох різних ШІМ-регуляторів, із яких перший складається з індуктивності L1, конденсатора С1, транзистора М1 та діода D1 ι є кроково-знижувальним регулятором, здатним до керування потоком електроенергії від основного джерела електроенергії, тобто позитивного джерела напруги Vcc, до навантаження RL, що, за припущенням, має потужний опір, тоді як другий складається з індуктивності L2, транзистора М2 та діода D2 ι є кроково-підвищувальним регулятором, що забезпечує швидку розрядку компонентів контура L1 та С1, тобто запасу енергії із двох компонентів першого регулятора. Іншими словами кроково-підвищувальний регулятор придатний для передачі без розсіювання енергії від компонентів контура L1 та С1 до основного джерела Vcc Щоб зробити це достатньо швидко, бажано використовувати друге джерело електроенергії, тобто негативне джерело напруги Vdd. Звичайно, два ШІМ-регулятора та їх перемикаючі компоненти М1 та М2 повинні бути керовані відповідним керуючим пристроєм, позначеним UC на Фіг.2, Фіг.6 та Фіг.7, при цьому компонент М1 має бути керований перемикаючим сигналом робочого циклу Dc, а компонент М2 має бути керований перемикаючим сигналом робочого циклу Ds. Що стосується перемикаючих компонентів контура з відповідно обраним керуючим пристроєм, то транзистори М1 та М2 можуть бути, незалежно один від одного, N-канальними або Р-канальними уніполярними польовими МОП-транзисторами, або транзисторами іншого типу. Що стосується діодів D1 та D2, то вони можуть бути PN-типу тобто процесорними вузлами, або діодами Шоткі Крім того ці діоди можна замінити або з'єднати з транзисторами, наприклад, уніполярними польовими МОП-транзисторами, відповідно керованими таким чином, щоб мати дуже обмежений спад напруги у цих компонентах контура під час проходження струму крізь них, Ці деталі 7 90434 необхідні для подальшого підвищення ефективності. Основний генератор Vcc має бути придатний для постачання всієї електроенергії, що необхідна для останнього каскаду підсилювача радіочастот. Кроково-знижувальний регулятор, керований сигналом з робочого циклу Dc передає енергію на вихід, що дозволяє варіювати вихідну напругу VOUT згідно з модулюючим сигналом A(t). Характеристика кроково-знижувального регулятора при усталеному режимі роботи: [1], Динамічна характеристика відрізняється від зазначеної вище характеристики внаслідок двох різних фізичних явищ: - лінійних характеристик сигналів компонентів L1, С1, RL після пропускання крізь фільтр низьких частот, - нелінійних характеристик, обумовлених топологією компонентів М1 та D1 контура, що дозволяє струму текти від Vcc до V0UT, але не навпаки. Лінійність роботи кроково-знижувального регулятора можна компенсувати впливом на робочий цикл Dc сигналу, що запускає транзистор М1. Кроково-знижувальний регулятор проявляє свої нелінійні характеристики коли вихідна напруга V0UT повинна мати крутий негативний нахил, в такому випадку ні транзистор М1, ні діод D1 не придатні для усунення енергії від індуктивності L1 та конденсатора С1, ι вихідна напруга падає згідно з законом RL-C1/L1. Відносно фігури 3В, можливо показати, що нелінійне викривлення починається коли (негативний) нахил бажаної вихідної напруги перевищує час релаксації контурів L1, С1, RL: [2]. З формули [2] безпосередньо випливає те, що максимально допустимий нахил напруги Vo скерований до нуля Якщо напруга V0 близька до нуля, то вихідний опір RL не придатний для швидкої розрядки конденсатора С1 і, як наслідок, напруга V0UT стає дуже близькою до нуля. Такий результат показує, що головна проблема пов'язана з кроково-знижувальною топологією контур не може відтворювати форми коливань, вершини яких скеровані до нуля. Типовий приклад показаний на Фіг.3, зокрема Фіг.3А показує напрямок вектора X(t) модуля A(t) ι фазу Φ(t), котра на I-Q графіку проходить крізь початок координат, траєкторії такого типу однакові на таких багатьох схемах модуляцій, як QAM (квадратурна амплітудна модуляція) SSB, DSB або інші), Фіг.3В показує відповідні коливання амплітуди A(t) вектора X(t) та фактичної вихідної напруги VOUT, близько до вершини вихідний опір RL не придатний для достатньо швидкої розрядки конденса 8 тора С1 і, як результат, V0UT стає паразитною для A(t). Для вирішення цієї конкретної проблеми був введений кроково-підвищувальний регулятор Цей другий регулятор, керований сигналом з робочого циклу Ds, потрібен для зміни напрямку потоку енергії на обернений тобто від виходу, або все ж таки краще від компонентів L1 та С1, до основного джерела Vcc. Кроково-підвищувальний регулятор використовує підтримуюче джерело Vdd негативної напруги для збільшення швидкості розрядки виходу контуру Таким чином, цей модулятор може слідувати обом швидким динамікам модулювання сигналу ι проходити крізь нуль, і приходити до нуля при не нульовій похідній модульованого сигналу. Крім того, кроково-підвищувальний регулятор підтримує високу загальну ефективність, відкриваючи доступ на вихід тієї енергії, яка має бути передана до основного генератора Vcc. Використання кроково-знижувального та кроково-підвищувального ШІМ-регуляторів для варіювання напруги V0UT підвищує ефективність та динаміку, але вносить шум на частоті перемикання та й гармоніці Цей шум можна побачити за наявності побічних компонентів в амплітудній модуляції (на частоті перемикання та й гармоніці) разом з можливими проблемами з показниками шуму в сусідньому каналі. Частота перемикання має бути (згідно з теоремою Нюквіста) щонайменше вдвічі більша від максимальної ширини модулюючого сигналу результатом є те, що проблема передачі побічних компонентів не впливає на внутрішні сигнали, а скоріше на сигнали у сусідніх каналах. Для вирішення цієї проблеми в цьому винаході передбачені два різних підходи. Перший підхід передбачає усунення небажаних частот (частоти перемикання fsw та їі гармоніки 2fsw, 3fsw, ), використовуючи складений селективний фільтр. Коливання фази, що спричинені цим фільтром на частотах обвідних модулятора, вважатимуться частиною цілого фазового зсуву між A(t) та V0UT. Складений селективний фільтр має структуру яка мінімізуватиме еквівалентну ємність, оскільки вона буде додана до ємності конденсатора С1, причому це головний з компонентів, що спричинює описане вище нелінійне викривлення. На Фіг.2, Фіг.6 та Фіг.7 складений селективний фільтр позначений F. Другий підхід передбачає розсіювання небажаних частот шляхом накладання випадкових ι змінних у часі коливань на перемикання та відповідне спричинення невеликих та безперервних випадкових змін тривалості Τ періоду перемикання. Таке технічне рішення, будучи просте з точки зору контуру, ускладнює будову блоку UC керування (див Фіг.2, Фіг.6 and Фіг.7) не тільки в силу додавання стохастичного генератора, але також в силу того, що в формулах алгоритму керування тривалість періоду перемикання стає перемінною. Необхідно зазначити, що ці два підходи вигідніше використовувати разом. 9 90434 10 З точки зору керування систему можна розглядати як таку, що має два входи, тобто робочі цикли Dc та Ds, ι один вихід, тобто вихідну напругу V0UT. Таким чином аналітична модель була розроблена для використання й для електронноцифрового керування. Ця модель враховує величину вихідної напруги V0UT як функцію від робочого циклу Dc в кінці кожного циклу перемикання Цю модель можна легко переробити, враховуючи робочій цикл Dc як функцію від вихідної напруги V0UT. Прийнятний діапазон величини Dc знаходиться між 0 і 1; якщо ж врахована величина Dc менша нуля, то алгоритм враховує робочій цикл Ds, що забезпечує бажану вихідну напругу Наступні шість припущень зроблені з посиланнями на Фіг.2 Відповідно до першого припущення, напруга V0 у конденсаторі С1 еквівалентна вихідній напрузі V0UT в діапазоні A(t) Таке припущення підтверджено складеною селективною структурою вихідного фільтра, яка не послаблює сигнали в діапазоні модулюючого сигналу. Відповідно до другого припущення, напруга V0 у конденсаторі С1 залишається сталою під час кожного циклу перемикання. Відповідно до третього припущення, силовий підсилювач виконаний у вигляді резистора з величиною опору RL Опір RL, за припущенням, має бути постійним у кожному циклі перемикання Якщо силовий підсилювач має, таким чином, характеристику: - безперервність струму І1 що тече крізь індуктивність L1, що представлено нижче у формулі [3], і - збереження заряду на конденсаторі С1, що представлено нижче у формулі [4]. [3], то можливе нелінійне спрацьовування підсилювача також може бути враховане в аналітичній моделі В такому випадку можна використати наступний вираз: [8]. . Відповідно до четвертого припущення, порогова напруга діодів D1 і D2 має дорівнювати нулю. Відповідно до п'ятого припущення, струм І2, що тече крізь індуктивність L2, дорівнює нулю наприкінці кожного циклу перемикання. Цей вибір зроблено, беручи до уваги, що потік енергії переважно спрямований від джерела Vсc до навантаження RL і тільки у деяких окремих випадках - у зворотному напрямку. Таким чином виникають дві переваги. Перша перевага пов'язана з тим фактом, що, в системі буде тільки дві (замість трьох) перемінних стану, оскільки є тільки два компоненти, які передають енергію від одного циклу до іншого, тобто індуктивність L1 і конденсатор С1. Друга перевага пов'язана з тим фактом, що енергетичні петлі навмисно відсутні Інакше кажучи, небажана умова за якій узяту із джерела Vcc енергію передають на вихід (за допомогою кроково-знижувального регулятора), а тоді повертають у джерело Vcc, ніколи не виникає. Згідно з шостим припущенням, зміни робочого циклу Dc від одного циклу перемикання до іншого малі у порівнянні з зазначеним робочим циклом. В моделі використані два відношення: [9]. [4]. Фіг.4 показує, як змінюються струм І1 і напруга Vout згідно зі зробленими припущеннями. Підстановками у формули [3] та [4] отримуємо наступні формули [5], [6] і [7] [5]. [6]. [7], де , наступні формули (8) та (9) отримаємо Формули [8] та [9] представляють спрощену, але дуже ефективну, модель кроковознижувального ШІМ-регулятора ι дозволяють розраховувати напругу Vo на конденсаторі С1 (яка відповідає вихідній напрузі V0UT) та струм І1, що тече крізь індуктивність L1 в циклі «n+1» на базі величин струму I1, напруги V0UT, робочого циклу Dc та тривалості Τ періоду перемикання циклу «n». Заснований на цій аналітичній моделі ефективний спосіб керування може бути застосований для керування такими компонентами ШІМрегулятора, включеного у силовий перетворювач згідно з винаходом, які призначені для перемикання Перший спосіб керування заснований виключно на формулах [8] та [9] аналітичної моделі, спрощена схема відповідного перетворювача показана на Фіг.2 Проблема, що потребує вирішення, це розрахунок прикладання робочого циклу Dc до циклу "n" (Dc(n) на Фіг.4), коли відомі νΟUT(n+1) (нова цільова напруга), νΟUT(η) та 11(n) (фактичні значення двох змінних стану системи) та Т(n) 11 Таким чином формула [9] має бути застосована для визначення робочого циклу Dc як функції від решти Проблема полягає в нелінійності формули [9] відносно робочого циклу Dc. Тому краще ніж розв'язувати квадратне рівняння за складною процедурою, яка вимагатиме 90434 12 комплексної логічної схеми, використати раніше зазначене шосте припущення разом з тим фактом, що зміна тривалості (l-Dc(n)/2) помітно менша зміни тривалості Dc (які обидві представлені в другому члені формули [9]). З цього випливає, що: [10]. Формула [10] є однією з тих, що дозволяє виконати розрахунки, що необхідні для реалізації робочого циклу Dc в циклі "n" для отримання напруги VOUT(n+1) при відомих величинах V0UT(n), I1(n) та Dc(n-1). Логічний блок UC керування має виконувати для кожного циклу розрахунки згідно з наступною парою формул, а конкретніше згідно з формулою [11], з якої випливає формула [12]: [11]. [12]. Враховуючи те, що струм І1 не може змінити свого напрямку на обернений, формула [12] має «насичуватися» при нулі, тобто: якщо І1(n+1)I1(n+1)=0. Однак, формула [11] може призводити як до позитивних так і до негативних результатів, але негативний результат не має фізичного значення. У такому випадку модель показує, що для досягнення бажаної напруги \/0UT(n+1) потрібно буде зня ти заряд з С1, що можна зробити, виставляючи Dc=0 та Ds>0. В такому випадку формули [8] та [9] моделі залишатимуться дійсними, а тому, встановлюючи Dc(n)=0 і додаючи заряд Qs(n), який необхідно зняти з С1, отримаємо: [13]. [14]. В даному циклі заряд Qs(n), який має бути знятий з С1 для отримання VОUT(n+1), можна розрахувати як: [15]. Зазначимо, що формула [15], не враховуючи масштабний коефіцієнт "-С1", відноситься до чисельника формули [11] і тому не потребує перерахунку. Якщо в циклі "n" результатом є Dc
ДивитисяДодаткова інформація
Назва патенту англійськоюHigh efficiency power converter, a modulator and a transmitter with applications thereof
Автори англійськоюAlimenti Alessandro
Назва патенту російськоюВысокоэффективный силовой преобразователь, модулятор и передатчик с его использованием
Автори російськоюАлименти Алессандро
МПК / Мітки
МПК: H02M 3/00
Мітки: передавач, силовий, перетворювач, модулятор, використанням, високоефективний
Код посилання
<a href="https://ua.patents.su/11-90434-visokoefektivnijj-silovijj-peretvoryuvach-i-modulyator-ta-peredavach-z-jjogo-vikoristannyam.html" target="_blank" rel="follow" title="База патентів України">Високоефективний силовий перетворювач і модулятор та передавач з його використанням</a>
Спосіб захисту силового вимикача силового перетворювача і силовий перетворювач
Номер патенту: 66938
Опубліковано: 15.06.2004
Автори: Бєллавуан Жак, Монном Олівьє, Вейтен Мішель
МПК: H03K 17/082
Мітки: силовий, силового, спосіб, перетворювача, вимикача, перетворювач, захисту
Формула / Реферат:
1. Спосіб захисту силового вимикача силового перетворювача, з'єднаного з пристроєм обмеження граничної напруги, відповідно до якого підтримують максимально припустиму напругу на вказаному силовому вимикачі шляхом згладжування функції обмеження граничної напруги, коли вимикач вимкнений.2. Спосіб за п. 1, який відрізняється тим, що підтримують максимально припустиму напругу на вказаному силовому вимикачі за допомогою снаббера,...
Силовий модулятор
Номер патенту: 31013
Опубліковано: 15.12.2000
Автори: Макаренко Микола Петрович, Абарка Авила Густаво
МПК: H02M 1/02
Текст:
...застосовувати алгоритм керування силовими ключами, що знаходяться в одній стійкі, з любими наперед вибраними часовими паузами. Це, в свою чергу, дозволяє побудову силових ключів інвертора напруги на основі комбінованих тиристорно-транзисторних структур, значно підвищуючих вихідну потужнічть силового модулятора. До того ж при такому алгоритмі керування силовими ключами зникає проблема пропкання "наскрізних" струмів по стійках силових...
Силовий напівпровідниковий перетворювач з природним повітряним охолодженням
Номер патенту: 7353
Опубліковано: 15.06.2005
Автор: Наконечний Володимир Федорович
МПК: H05K 7/02, H01H 85/00
Мітки: силовий, природним, повітряним, напівпровідниковий, охолодженням, перетворювач
Формула / Реферат:
1. Силовий напівпровідниковий перетворювач переважно з природним повітряним охолодженням, що містить напівпровідникові прилади та індивідуальні охолоджувачі, що знаходяться з ними в тепловому та електричному контакті, встановлені у вигляді вертикальних та горизонтальних рядів, індивідуальні охолоджувачі орієнтовані ребрами вздовж конвекційного повітряного потоку та утворюють паралельну систему повітряного охолодження напівпровідникових...
Спосіб передачі даних, система з використанням такої передачі, передавач і приймач для передачі/прийому цифрових даних
Номер патенту: 72441
Опубліковано: 15.03.2005
Автори: Тідеманн Едвард Г., мол., Резайіфар Рамін, Томсік Джеймз Д., Бендер Пол І.
МПК: H04L 1/16
Мітки: використанням, цифрових, приймач, передачі, передавач, спосіб, даних, такої, система
Формула / Реферат:
1. Спосіб передачі даних від передавача до приймача з використанням кадру, який має порядковий номер і прапор повторної передачі, який включає:а) передачу кадру у перший раз із зазначеним прапором повторної передачі, установленим у значення "хибність", і порядкового номера, установленого в частину довгого порядкового номера,б) збільшення зазначеного довгого порядкового номера ів) повторну передачу кадру у...
Високоефективний каоліновий пігмент, фарба для покриття паперу, що містить високоефективний каоліновий пігмент, та спосіб виготовлення високоефективного каолінового пігменту
Номер патенту: 76947
Опубліковано: 16.10.2006
Автори: Нету Жуан Дуарте, Валадарес Марія Крістіна Алмейда
МПК: C09C 1/40, D21H 19/00
Мітки: містить, каоліновий, паперу, високоефективного, високоефективний, каолінового, фарба, покриття, спосіб, виготовлення, пігмент, пігменту
Формула / Реферат:
1. Високоефективний пігмент каоліну, який складається з суміші крупнозернистого і дрібнозернистого каоліну, де вказаний крупнозернистий каолін складається із крупних окремих пластичних частинок з високим рівнем кристалізації, що мають показник індексу Хінклі вище 0,6, і гранулометричним складом частинок, позбавлених піску, від 55 % до 75 % за масою - менше 2 мкм, і не більше 15 % за масою - менше 0,2 мкм, і де зазначений...
Попередній патент: Порошкова металургійна суміш для виготовлення пресованих порошкових заготовок
Наступний патент: Електрично керований нвч фазообертач
Випадковий патент: Спосіб оброблення зовнішніх поверхонь деталей обертання поліграфічних машин зі зносостійких композитів на основі алюмінію абразивними брусками з використанням ультразвуку