Спосіб автоматичного створення заданого призабійного простору при очисних забійних роботах у підземній розробці кам’яного вугілля


Формула / Реферат
1. Спосіб автоматичного створення заданого призабійного простору при роботах очисного забою, що має забійний конвеєр (20), щонайменше одну очисну машину (22), а також гідравлічне щитове механізоване кріплення, у підземній розробці кам'яного вугілля, в якому:
за допомогою датчиків (17) ухилу, розміщених щонайменше на трьох із чотирьох основних вузлів кожної секції (10) щитового механізованого кріплення, тобто опорному полозі (11), завальному щиті (14), несучих шарнірних консолях (16) і завальній області підтримуючого перекриття (13), визначають ухил вузлів кріплення стосовно горизонталі, і
на основі змінених даних в обчислювальному блоці шляхом порівняння зі збереженими у ньому базовими даними, що визначають геометричну орієнтацію вузлів і їхнє переміщення під час крокового переміщення, розраховують відповідну перпендикулярну стосовно падіння пласта висоту (31) секції (10) щитового механізованого кріплення, і
в якому, крім того, за допомогою встановлених на очисній машині (22) датчиків (27) реєструють висоту (32) врізання очисної машини (22) як призабійний простір,
при цьому відповідні набори даних зберігають для кожної ділянки очисних робіт, пройденої відповідною секцією (10) щитового механізованого кріплення, і синхронізують у змісті синхронного аналізу за місцем розташування на ділянці очисних робіт висоту (32) врізання очисної машини (22) з висотою (31) кріплення секції (10) щитового механізованого кріплення, коли секція (10) щитового механізованого кріплення, що переміщається з тимчасовою затримкою, досягає того місця, до якого належить покладена в основу порівняння з висотою (31) кріплення висота (32) врізання очисної машини (22).
2. Спосіб за п. 1, у якому збережені набори даних для висоти врізання (32) і висоти щита (31) синхронізують між собою в однаковий момент часу у вмісті синхронного за часом аналізу для ділянки очисних робіт.
3. Спосіб за п. 1 або п. 2, у якому для окремої роботи з очищення на підставі даних про родовище, а також машинних даних використовуваного забійного встаткування попередньо вказують задану висоту для висоти (31) щита секції (10) щитового механізованого кріплення, а при відхиленнях обчисленої фактичної висоти кріплення від заданої висоти кріплення виконують автоматичне керування висотою (32) врізання очисної машини (22) для досягнення заданої висоти кріплення.
4. Спосіб за п. 3, у якому висоту (32) врізання очисної машини (22) встановлюють за допомогою зміни верхнього врізання на одному з барабанів (23, 24).
5. Спосіб за п. 3, у якому висоту (32) врізання очисної машини (22) встановлюють за допомогою зміни нижнього врізання на одному з барабанів (23, 24).
6. Спосіб за пп. 1-5, у якому при зменшенні значення висоти (32) врізання менше висоти (31) щита обчислюють зближення, що з'являється, і компенсують це зближення за допомогою збільшення нижнього врізання.
7. Спосіб за п. 6, у якому у випадку запланованих зупинок роботи призабійний простір збільшують на розмір зближення, очікуваний протягом зупинки роботи.
8. Спосіб за пп. 1-7, у якому на забійному конвеєрі й/або на очисній машині відповідно встановлений датчик ухилу й визначають кут ухилу забійного конвеєра й очисної машини у напрямку очищення.
9. Спосіб за п. 8, у якому розрахований на підставі вимірюваного у напрямку очищення кута ухилу забійного конвеєра й очисної машини кут неузгодженості між опорним полозом секції щитового механізованого кріплення й конвеєром або очисною машиною враховують у розрахунку призабійного простору, що вирізається очисною машиною.
10. Спосіб за п. 8, у якому розрахований на підставі вимірюваного у напрямку очищення кута ухилу забійного конвеєра (20) і/або очисної машини (22) кут (45) неузгодженості між підтримуючим перекриттям (13) секції (10) щитового механізованого кріплення й конвеєром (20) або очисною машиною (22) враховують у розрахунку призабійного простору, що вирізається очисною машиною (22).
11. Спосіб за пп. 1-10, у якому за допомогою визначення ухилу підтримуючого перекриття (13) секції (10) щитового механізованого кріплення у напрямку очищення визначають напрямок западин і/або сідловин, у напрямку очищення й шляхом виявлених змін ухилу підтримуючого перекриття (13) протягом попередньо заданого періоду часу заздалегідь розраховують зміну призабійного простору й відповідно настроюють керування врізання очисної машини (22).
12. Спосіб за пп. 1-11, у якому за допомогою визначення ухилу окремих секцій (10) щитового механізованого кріплення поперек до напрямку очищення визначають напрямок западин і/або сідловин у напрямку посування забою очисної машини (22) і керують врізанням очисною машиною (22) таким чином, що барабани (23, 24) слідують за виявленим напрямком западин і/або сідловин.
13. Спосіб за одним із пп. 1-12, у якому як датчики (17) ухилу використовують датчики прискорення, які на підставі відхилення від прискорення сили ваги реєструють кутове положення датчика прискорення у просторі.
14. Спосіб за п. 13, у якому для виключення викликаних коливаннями використовуваних вузлів похибок визначені датчиками прискорення значення вимірювання перевіряють і виправляють за допомогою відповідного методу загасання.
Текст
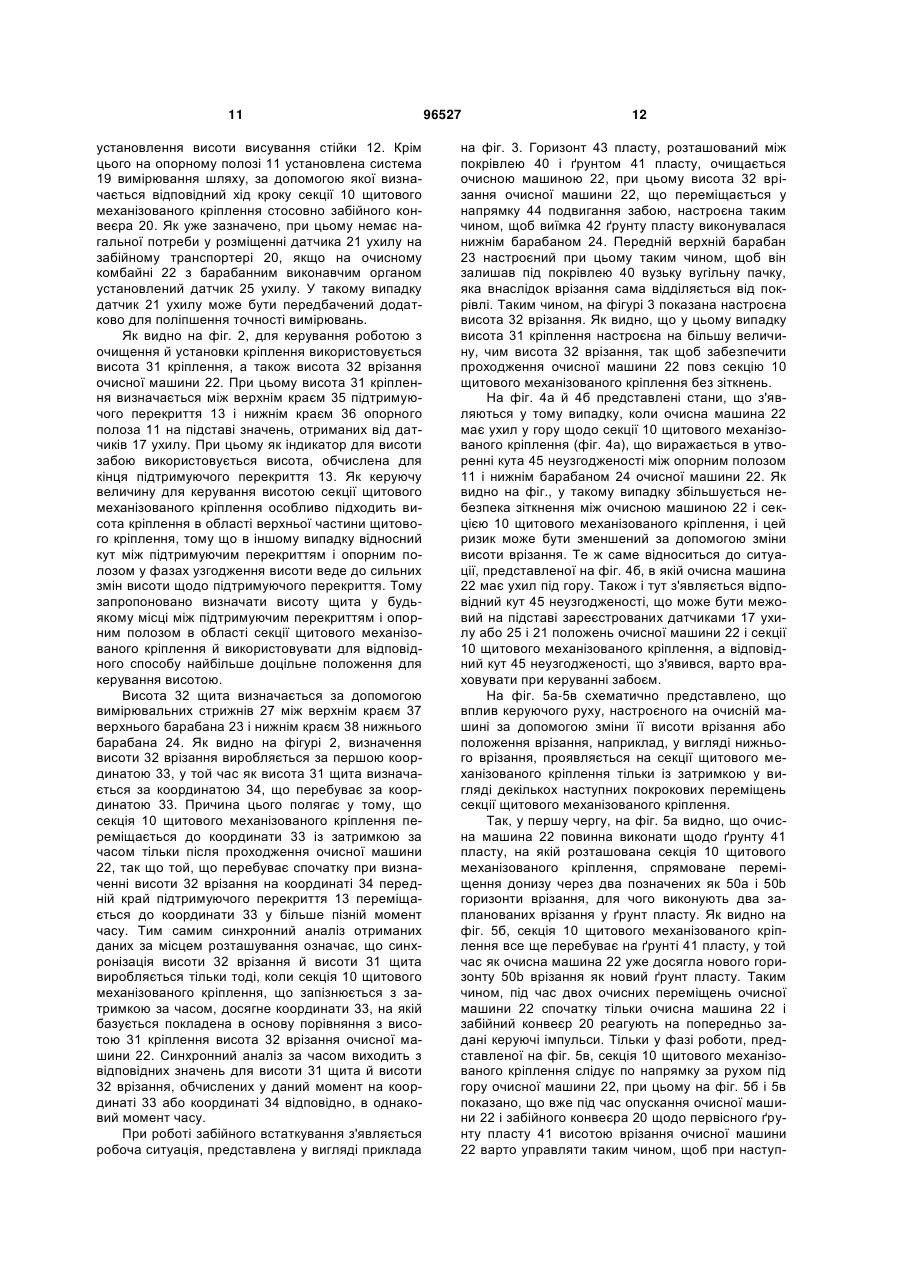
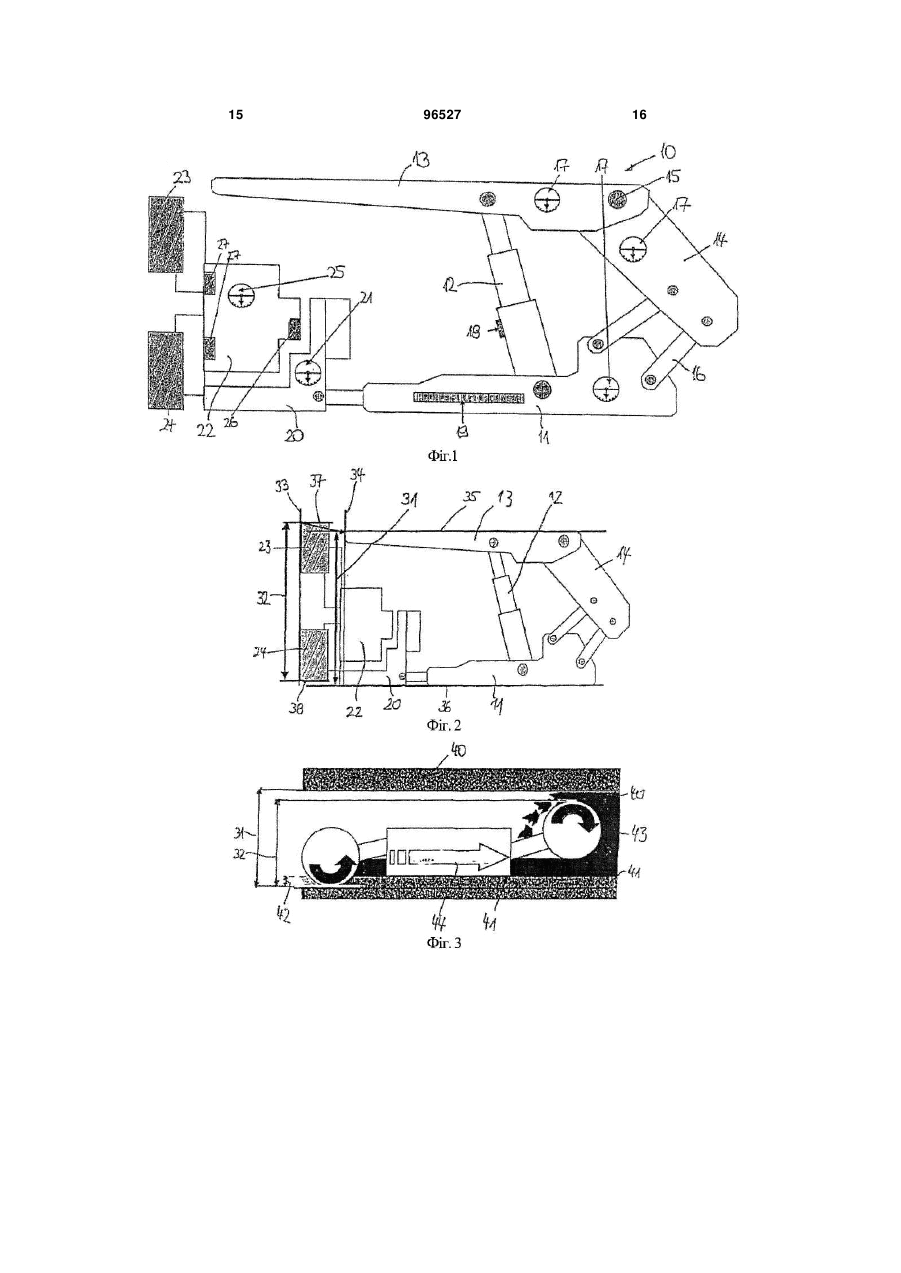
1. Спосіб автоматичного створення заданого призабійного простору при роботах очисного забою, що має забійний конвеєр (20), щонайменше одну очисну машину (22), а також гідравлічне щитове механізоване кріплення, у підземній розробці кам'яного вугілля, в якому: за допомогою датчиків (17) ухилу, розміщених щонайменше на трьох із чотирьох основних вузлів кожної секції (10) щитового механізованого кріплення, тобто опорному полозі (11), завальному щиті (14), несучих шарнірних консолях (16) і завальній області підтримуючого перекриття (13), визначають ухил вузлів кріплення стосовно горизонталі, і на основі змінених даних в обчислювальному блоці шляхом порівняння зі збереженими у ньому базовими даними, що визначають геометричну орієнтацію вузлів і їхнє переміщення під час крокового переміщення, розраховують відповідну перпендикулярну стосовно падіння пласта висоту (31) секції (10) щитового механізованого кріплення, і в якому, крім того, за допомогою встановлених на очисній машині (22) датчиків (27) реєструють висоту (32) врізання очисної машини (22) як призабійний простір, при цьому відповідні набори даних зберігають для кожної ділянки очисних робіт, пройденої відповідною секцією (10) щитового механізованого кріп 2 (19) 1 3 96527 4 8. Спосіб за пп. 1-7, у якому на забійному конвеєрі й/або на очисній машині відповідно встановлений датчик ухилу й визначають кут ухилу забійного конвеєра й очисної машини у напрямку очищення. 9. Спосіб за п. 8, у якому розрахований на підставі вимірюваного у напрямку очищення кута ухилу забійного конвеєра й очисної машини кут неузгодженості між опорним полозом секції щитового механізованого кріплення й конвеєром або очисною машиною враховують у розрахунку призабійного простору, що вирізається очисною машиною. 10. Спосіб за п. 8, у якому розрахований на підставі вимірюваного у напрямку очищення кута ухилу забійного конвеєра (20) і/або очисної машини (22) кут (45) неузгодженості між підтримуючим перекриттям (13) секції (10) щитового механізованого кріплення й конвеєром (20) або очисною машиною (22) враховують у розрахунку призабійного простору, що вирізається очисною машиною (22). 11. Спосіб за пп. 1-10, у якому за допомогою визначення ухилу підтримуючого перекриття (13) секції (10) щитового механізованого кріплення у напрямку очищення визначають напрямок западин і/або сідловин, у напрямку очищення й шляхом виявлених змін ухилу підтримуючого перекриття (13) протягом попередньо заданого періоду часу заздалегідь розраховують зміну призабійного простору й відповідно настроюють керування врізання очисної машини (22). 12. Спосіб за пп. 1-11, у якому за допомогою визначення ухилу окремих секцій (10) щитового механізованого кріплення поперек до напрямку очищення визначають напрямок западин і/або сідловин у напрямку посування забою очисної машини (22) і керують врізанням очисною машиною (22) таким чином, що барабани (23, 24) слідують за виявленим напрямком западин і/або сідловин. 13. Спосіб за одним із пп. 1-12, у якому як датчики (17) ухилу використовують датчики прискорення, які на підставі відхилення від прискорення сили ваги реєструють кутове положення датчика прискорення у просторі. 14. Спосіб за п. 13, у якому для виключення викликаних коливаннями використовуваних вузлів похибок визначені датчиками прискорення значення вимірювання перевіряють і виправляють за допомогою відповідного методу загасання. Винахід належить до способу автоматичного створення заданого призабійного простору при роботах очисного забою, що має забійний конвеєр, щонайменше одну очисну машину, а також гідравлічне щитове механізоване кріплення, у підземній розробці кам'яного вугілля. Одна з проблем при автоматичному керуванні роботами в очисному забої, як у напрямку виїмки, так і у напрямку подвигання забою очисної машини складається, зокрема, у тому, щоб, з одного боку, створити призабійний простір достатнього розміру для забезпечення проходу забійного встаткування, наприклад, без зіткнень між очисною машиною й секціями щитового механізованого кріплення при проходженні очисної машини повз них, а з іншого боку, забезпечити як можна менший обвал гірської породи при очисних роботах, таким чином, по можливості обмежити виконання очисних робіт горизонтом пласту без виїмки занадто великого обсягу бічної породи. Наявні головним чином перед очисними роботами дані про родовище, що відносяться до потужності пласту, ґрунту й покрівлі пласту й наявності сідловин і/або западин, як у напрямку виїмки, так і у поздовжньому напрямку забійного встаткування, тобто у напрямку подвигання забою очисної машини, є занадто неточними для їх використання в якості опорних для автоматизованого керування роботою з очищення й установки кріплення. Тому в основі винаходу лежить завдання розробки способу вище зазначеного типу, за допомогою якого на підставі даних, отриманих від забійного встаткування, можлива автоматизація роботи з очищення й установки кріплення стосовно до створення заданого призабійного простору. Рішення цього завдання, включаючи кращі варіанти здійснення й удосконалення винаходу, ви пливає зі змісту формули винаходу, що викладена після цього опису. Основна ідея винаходу передбачає спосіб, призначений, насамперед, для очищення врізанням за допомогою очисного комбайна з барабанним виконавчим органом як очисна машина, при якому за допомогою датчиків ухилу, розміщених щонайменше на трьох із чотирьох основних вузлів кожної секції щитового механізованого кріплення, тобто опорному полозі, завальному щиті, несучих шарнірних консолях і завальній області підтримуючого перекриття, визначають ухил вузлів кріплення стосовно горизонталі на основі змінених даних в обчислювальному блоці шляхом порівняння зі збереженими у ньому базовими даними, що визначають геометричну орієнтацію вузлів і їхнє переміщення під час крокового переміщення, розраховують відповідну перпендикулярну стосовно падіння пласту висоту секції щитового механізованого кріплення, при якому, крім того, за допомогою встановлених на очисній машині датчиків реєструють висоту врізання очисної машини в якості призабійного простору, при цьому відповідні набори даних зберігають для кожної ділянки очисних робіт, пройденого відповідною секцією щитового механізованого кріплення, і синхронізують у змісті синхронного аналізу по місцю розташування на ділянці очисних робіт висоту врізання очисної машини з висотою кріплення секції щитового механізованого кріплення, що коли переміщається з тимчасовою затримкою секція щитового механізованого кріплення досягає того місця, до якого відноситься висота врізання очисної машини, покладена в основу порівняння з висотою кріплення. З винаходом зв'язана та перевага, що, у першу чергу, на підставі обумовленої з порівняно невеликими витратами висоти кріплення одержують параметр для системи керування забоєм з достат 5 ньою точністю й надійністю. Інший одержуваний відповідно до винаходу параметр складається у реєстрації напрямку врізання очисної машини завдяки визначенню її абсолютної висоти врізання. Тому що підтримуюче перекриття відповідної секції щитового механізованого кріплення досягає очищену очисною машиною область при її переміщенні повз секцію щитового механізованого кріплення з затримкою за часом, тобто з так званим запізнюванням кріплення на один або два кроки кріплення, винахід передбачає, що відповідні набори даних зберігають для кожної ділянки очисних робіт, за якою пройшла відповідна секція щитового механізованого кріплення, і синхронізуються у змісті синхронного аналізу по місцю розташування. Завдяки такій мірі можливе одержання відомостей про те, чи відповідає звільнена очисною машиною висота врізання також і наступній висоті кріплення у цьому місці, або ж можлива помилкова покрівля, що з'являється, або зближення, що відбувається, ведуть до відхилень висоти кріплення нагору або донизу від висоти врізання, які варто враховувати при наступному переміщенні очисної машини за допомогою зміни або узгодження її висоти врізання. Те ж саме таке відноситься до проходження западин і/або сідловин. Тому що у відповідному винаходу способі використовують, головним чином, отриману висоту кріплення, щоб з урахуванням висоти врізання очисної машини забезпечити ланцюг автоматичного регулювання для керування роботою з очищення й установки кріплення, що при застосуванні цього ланцюга веде до автоматичного дотримання заданого призабійного простору. При цьому з урахуванням мети як індикатор висоти забою можна застосовувати обумовлену на передньому краї підтримуючого перекриття перпендикулярну стосовно падіння пласту висоту кріплення між верхнім краєм перекриття й нижнім краєм опорного полоза. Як керуюча величина для керування висотою відповідної секції щитового механізованого кріплення також підходить висота кріплення в області верхньої частини щитового кріплення, тому що в іншому випадку відносний кут між підтримуючим перекриттям і опорним полозом в окремих фазах узгодження висоти веде до сильних змін висоти щодо краю перекриття. Тому може бути доцільним визначити висоту кріплення між підтримуючим перекриттям і опорним полозом у будь-яких місцях і використовувати для відповідного способу найбільше доцільне місце для керування висотою. Відповідно до одного приклада здійснення винаходу можна передбачити, що збережені набори даних для висоти врізання й висоти кріплення синхронізують один з одним в однаковий момент часу у змісті синхронного за часом аналізу для вибраної ділянки очисних робіт. Навіть якщо у момент синхронізації відповідна секція щитового механізованого кріплення ще не досягла очищеної області, синхронний за часом аналіз наявних наборів даних може використовуватися для виконання прогнозів щодо розвитку призабійного простору й змін ухилу на секціях щитового механізованого кріплення під час наступного просування очищення, так що на підставі відповідним чином обчислених тенденцій 96527 6 у відношенні призабійного простору можна завчасно погодити роботу з очищення й установки кріплення з погляду дотримання попередньо заданого призабійного простору. Крім того, в одному прикладі здійснення винахід передбачає, що дійсні для окремого очисного забою на підставі даних про родовище, а також для використовуваного забійного встаткування машинні дані попередньо задають відповідну необхідну призабійному простору задану висоту для висоти секцій щитового механізованого кріплення й при відхиленнях обчисленої фактичної висоти кріплення від заданої висоти кріплення відбувається автоматичне керування висотою врізання очисної машини для досягнення заданої висоти кріплення. Дійсну для призабійного простору задану висоту кріплення одержують, з одного боку, на підставі структури пласту, що очищається, при цьому очищення повинно регулярно реєструвати матеріал, наявний між твердою покрівлею й твердим ґрунтом пласту. Тим самим, це при необхідності включає очищення вологої пачки копалини, що знаходиться між вугіллям і твердою покрівлею, а також перебуває між вугіллям і твердим ґрунтом пласту різнорідного пласту копалини. З іншого боку, особливу увагу необхідно приділяти даним секцій щитового механізованого кріплення, насамперед їхньої робочої області між опорою на твердий ґрунт пласту й підпиранням твердої покрівлі, так що висота врізання не повинна бути більшою, ніж робоча область секцій щитової механізованої покрівлі. При цьому задану висоту врізання розраховують таким чином, щоб був можливий прохід очисної машини з попередньо заданою висотою врізання у межах робочої висоти секцій щитової механізованої покрівлі без зіткнення. Тому що під час роботи тверда покрівля не повинна захоплюватися очисною машиною, при визначенні висоти врізання при необхідності варто передбачити заплановану виїмку ґрунту пласту, щоб забезпечити необхідний призабійний простір навіть при малій потужності пласту. На підставі передбаченого відповідно до винаходу постійного контролю фактичної висоти кріплення можна від врізання до врізання очисної машини перевіряти, чи дотримується створюваний очисною машиною призабійний простір відповідно до заданої висоти щита, або ж чи з'являються відхилення нагору або донизу. Відповідно до цих відхилень можна здійснювати автоматичне керування очисною машиною, а саме або за допомогою зміни верхнього врізання на випереджальному барабані, який, однак, не повинен захоплювати тверду покрівлю, або за допомогою зміни нижнього врізання на запізнілому барабані. При цьому вибір величини нижнього врізання або, при необхідності, величини верхнього врізання при необхідності регулюють при різних відхиленнях фактичної висоти кріплення від заданої висоти кріплення. Завдяки цьому раптові зміни в ухилі підтримуючих перекриттів окремих секцій щитового механізованого кріплення на обмежених ділянках очисного забою у напрямку більше високого призабійного простору дозволяють зробити вивід про наявність локально обмежених обвалів, і їх 7 можна тим самим відрізнити від, можливо, невірно настроєної висоти врізання очисної машини. Порівняння заданої висоти щита з фактичною висотою щита може перекриватися через появу зближення, що зменшує очищений призабійний простір всупереч підтримуючому ефекту використовуваного щитового механізованого кріплення. Наприклад, відповідно до одного приклада здійснення винаходу передбачено, що якщо значення висоти врізання стає менше висоти щита, на підставі цього визначають появу зближення й, наприклад, компенсують це зближення за допомогою збільшення нижнього врізання. Завдяки цьому можливо цілеспрямовано компенсувати вплив зближення на висоту забою. В одному особливому прикладі здійснення винаходу передбачено, що у випадку запланованих зупинок роботи призабійний простір збільшують на розмір зближення, очікуваного протягом зупинки роботи. Тому що утворення призабійного простору за допомогою подвигання очисного забою також залежить від того, в якому положенні відносного ухилу перебуває очисна машина з її барабанами щодо секцій щитового механізованого кріплення, відповідно до одного приклада здійснення винаходу передбачено, що на забійному конвеєрі й/або на очисній машині відповідно встановлений датчик ухилу, і визначають кут ухилу забійного конвеєра й очисної машини у напрямку очищення. При цьому досить розміщення одного датчика ухилу на очисній машині. Хоча очисна машина, що переміщається на забійному конвеєрі й направляється за ним, деяким чином утворить єдине ціле з забійним конвеєром, для поліпшення точності керування може бути доцільним також забезпечити реєстрацію ухилу забійного конвеєра за допомогою розміщеного на ньому датчика ухилу. При необхідності для потреб керування досить розміщення датчика ухилу тільки на забійному конвеєрі. Реєстрація поводження ухилу очисної машини щодо положення секції очисного механізованого кріплення дає можливість при відносних кутових положеннях секцій щитового механізованого кріплення й очисної машини відносно один одного, з одного боку, визначати кут неузгодженості опорного полоза секції щитового механізованого кріплення й очисної машини або забійного конвеєра, а з іншого боку, кут неузгодженості між підтримуючим перекриттям секції щитового механізованого кріплення й очисною машиною або забійним конвеєром і враховувати відповідний кут неузгодженості у розрахунку створюваного очисною машиною при очисних роботах призабійного простору. Наприклад, може бути доцільним реєструвати кут опорного полоза, вимірюваний у напрямку очищення наявним на опорному полозі секції щитового механізованого кріплення датчиком ухилу, щодо горизонталі й використовувати як керуючу величину, тому що полоз, як правило, переміщається не по природному ґрунту пласту, а уздовж очищеного східчастого контуру слідів врізання барабаном. Тому при установці секції щитового механізованого кріплення через високий питомий тиск опорного полоза з піком тиску, що проявляється рядом з кінцем опорного полоза, найчастіше відбувається 96527 8 занурення у штучно створений ґрунт пласту. При цьому занурення опорного полоза відбувається не паралельно положенню, а через розподіл тиску на опорному полозі більшою мірою у кінця опорного полоза, так що опорний полоз виконує деякий обертовий рух. Для протидії може використовуватися так званий "опорний підйомник", за допомогою якого опорний полоз окремої секції щитового механізованого кріплення можна підняти у порівнянні з підтримуючим перекриттям у рамках крокового переміщення. При використанні опорного підйомника опорні полози відповідної секції щитового механізованого кріплення піднімають перед кроковим переміщенням, щоб опорні полози могли переміститися ковзним рухом на ґрунт пласту або на лежачий на ній навал відбитої копалини. Тим самим запобігається більше сильне занурення опорних полозів. Також опорний підйомник підходить для корисного вирівнювання секції щитового механізованого кріплення при переміщенні вперед. У тих випадках, коли опорний полоз переміщається по ґрунту пласту без більших проблем, досить керування секцією щитового механізованого кріплення з урахуванням зареєстрованого ухилу опорного полоза; щодо цього визначення кута опорного полоза не потрібно. Навпроти, у випадку підтримуючого перекриття такий випадок виникає рідко, поки на покрівлі не з'являється обвалення помилкової покрівлі, тому що підтримуюче перекриття, як правило, переміщається уздовж природного горизонту покрівлі. Тим самим, як правило, занурення підтримуючого перекриття у покрівлю не відбувається. Однак у випадку появи зближення виникає втрата висоти з наступаючим тим самим кутовим рухом підтримуючого перекриття, так що, як уже зазначено, відносні положення між очисною машиною й підтримуючим перекриттям дозволяють зробити виводи про очікуваний призабійний простір. Крім того, реєструємий за допомогою контролю ухилу на очисній машині підйом у гору очисної машини у напрямку очищення веде до зменшення призабійного простору з небезпекою зіткнень очисної машини із секціями щитової механізованої покрівлі, у той час як переміщення очисної машини під гору веде до збільшення призабійного простору, що при відомих умовах перевищує максимальну робочу область секцій щитового механізованого кріплення. Це необхідно враховувати шляхом узгодження висоти врізання на очисній машині. Таке переміщення очисної машини у гору або під гору неминуче відбувається при переміщенні через западини й/або сідловини у напрямку очищення. Так, наприклад, вхід у сідловину розпізнають за допомогою зареєстрованої зміни ухилу прилягаючого до покрівлі підтримуючого перекриття секції щитового механізованого кріплення. На підставі величини зміни ухилу між двома кроковими переміщеннями щитового механізованого кріплення вперед можна обчислити зміну висоти у змісті зменшення висоти для кожного наступного крокового переміщення відповідної секції щитового механізованого кріплення. Для втримання призабійного простору на настроєному заданому рівні й запобігання зменшення призабійного простору 9 очисна машина повинна виконати керуючий рух для зменшення нижнього врізання. Далі перед перевищенням верхньої точки сідловини може бути виявлена зміна ухилу підтримуючого перекриття щодо горизонталі. Ці дані використовують для завчасного керування врізанням за допомогою керування поверненням пройденої ділянки зменшеної висоти до вихідного положення, щоб задана висота призабійного простору також дотримувалася при проходженні сідловини. Відповідний процес керування, однак, у зворотному напрямку, настроюється при проходженні западини, при якому з принципової точки зору домінує ідентичний хід зміни напрямку. Розташовані на секціях щитового механізованого кріплення датчики ухилу також вказують величину ухилу секцій щитового механізованого кріплення поперек до напрямку очищення, тому що й у напрямку подвигання забою очисної машини у забої можуть бути сідловини й западини. Так лінію покрівлі й ґрунту пласту у поздовжньому напрямку забою можна вивести з поперечного нахилу секцій щитового механізованого кріплення, існує можливість у такий спосіб управляти випереджальним барабаном і запізнілим барабаном очисної машини у ході постійного крокового переміщення для того, щоб виключити появу небажаної ділянки покрівлі або, можливо, ґрунту пласту, що виходить за межі настроєної величини виїмки, завдяки чому запобігають зайвий захват порожньої породи або залишення вугілля під покрівлею, або появу вузьких місць між очисною машиною й щитовим механізованим кріпленням. Відповідно до одного приклада здійснення винаходу передбачено, що як датчики ухилу використовуються датчики прискорення, які на підставі відхилення від прискорення сили ваги реєструють кутове положення датчика прискорення у просторі. Тим самим фізично визначається кут щодо вертикалі, що перераховують у кут ухилу для ухилу вузлів кріплення щодо горизонталі. При цьому з метою виключення погрішностей, викликаних коливаннями використовуваних вузлів, може бути передбачено, що визначені датчиками прискорення значення вимірювання перевіряють і виправляють за допомогою відповідного методу загасання. На кресленні представлені приклади здійснення винаходу, які описані нижче. Представлено на: Фіг. 1 секція щитового механізованого кріплення з розміщеними на ній датчиками ухилу у комбінації з забійним конвеєром і застосовуваним як очисна машина очисним комбайном з барабанним виконавчим органом у схематичному виді збоку, Фіг. 2 забійне встаткування згідно фіг. 1 з використанням синхронного аналізу за місцем розташування, Фіг. 3 забійне встаткування згідно фіг. 1 при очисній роботі у схематичному поданні, Фіг. 4а забійне встаткування згідно фіг. 1 при ухилі очисної машини у гору, Фіг. 4б забійне встаткування згідно фіг. 1 при ухилі очисної машини під гору, 96527 10 Фіг. 5а-в у схематичному поданні зміщене за часом переміщення секції щитової механізованої покрівлі слідом за подвиганням очисної машини, Фіг. 6а-6з у схематичному поданні регулювання для досягнення попередньо заданого призабійного простору, виходячи з початкової занадто великої висоти кріплення. На підставі пояснень, що нижче приводяться, до фігур, пояснюються основні положення способу відповідно до винаходу. Представлене на фіг. 1 забійне встаткування містить у собі, у першу чергу, секцію 10 щитового механізованого кріплення з опорним полозом 11, на якому паралельно розміщені дві стійки 12, з яких у фіг. 1 видна тільки одна стійка, і в яких на їхньому верхньому кінці розташоване підтримуюче перекриття 13. У той час як підтримуюче перекриття 13 своїм переднім (лівим) кінцем спрямоване до описаної далі очисної машини, на задньому (правому) кінці підтримуючого перекриття 13 за допомогою шарніра 15 шарнірно розташований завальний щит 14, при цьому завальний щит підтримується у вигляді збоку двома розташованими на опорному полозі 11 несучими шарнірними консолями 16. У зображеному прикладі здійснення на секції 10 щитового механізованого кріплення встановлені три датчики 17 ухилу, а саме: датчик 17 ухилу на опорному полозі 11, датчик 17 ухилу у задній частині підтримуючого перекриття 13 поруч із шарніром 15 і датчик 17 ухилу на завальному щиті 14. Як не представлено більше докладно, на четвертому рухливому вузлі секції 10 щитового механізованого кріплення, несучих шарнірних консолях 16, також може бути передбачений датчик ухилу, при цьому з чотирьох можливих датчиків 17 ухилу варто встановити три датчики ухилу для того, щоб за допомогою отриманих ними значень ухилу визначати положення секції щитового механізованого кріплення в очисному просторі. Таким чином, винахід не обмежений точно зображеним на фігурі 1 розташуванням датчиків ухилу, а містить у собі всі можливі комбінації трьох датчиків ухилу на чотирьох рухливих вузлах секції щитового механізованого кріплення. Представлена на фіг. 1 секція 10 щитового механізованого кріплення прикріплена до забійного транспортера 20, що також має датчик 21 ухилу, завдяки чому з погляду керування забійним устаткуванням також і тут, у принципі, можливе одержання даних про положення конвеєра. На конвеєрі 20 розташована очисна машина у вигляді очисного комбайна 22 з барабанним виконавчим органом, що має верхній (ріжучий) барабан 23 і нижній (ріжучий) барабан 24, при цьому в області очисного комбайна 22 з барабанним виконавчим органом розташований датчик 25 ухилу, крім того, датчик 26 для реєстрації відповідного місця розташування очисного комбайна 22 з барабанним виконавчим органом у забої, а також вимірювальні стрижні 27 для вимірювання висоти врізання очисного комбайна 22 з барабанним виконавчим органом. Механічне оснащення забійного встаткування доповнюється установкою датчиків 18 на стійках 12, за допомогою яких можлива зміна положення підтримуючого перекриття 13 за висотою за рахунок 11 установлення висоти висування стійки 12. Крім цього на опорному полозі 11 установлена система 19 вимірювання шляху, за допомогою якої визначається відповідний хід кроку секції 10 щитового механізованого кріплення стосовно забійного конвеєра 20. Як уже зазначено, при цьому немає нагальної потреби у розміщенні датчика 21 ухилу на забійному транспортері 20, якщо на очисному комбайні 22 з барабанним виконавчим органом установлений датчик 25 ухилу. У такому випадку датчик 21 ухилу може бути передбачений додатково для поліпшення точності вимірювань. Як видно на фіг. 2, для керування роботою з очищення й установки кріплення використовується висота 31 кріплення, а також висота 32 врізання очисної машини 22. При цьому висота 31 кріплення визначається між верхнім краєм 35 підтримуючого перекриття 13 і нижнім краєм 36 опорного полоза 11 на підставі значень, отриманих від датчиків 17 ухилу. При цьому як індикатор для висоти забою використовується висота, обчислена для кінця підтримуючого перекриття 13. Як керуючу величину для керування висотою секції щитового механізованого кріплення особливо підходить висота кріплення в області верхньої частини щитового кріплення, тому що в іншому випадку відносний кут між підтримуючим перекриттям і опорним полозом у фазах узгодження висоти веде до сильних змін висоти щодо підтримуючого перекриття. Тому запропоновано визначати висоту щита у будьякому місці між підтримуючим перекриттям і опорним полозом в області секції щитового механізованого кріплення й використовувати для відповідного способу найбільше доцільне положення для керування висотою. Висота 32 щита визначається за допомогою вимірювальних стрижнів 27 між верхнім краєм 37 верхнього барабана 23 і нижнім краєм 38 нижнього барабана 24. Як видно на фігурі 2, визначення висоти 32 врізання виробляється за першою координатою 33, у той час як висота 31 щита визначається за координатою 34, що перебуває за координатою 33. Причина цього полягає у тому, що секція 10 щитового механізованого кріплення переміщається до координати 33 із затримкою за часом тільки після проходження очисної машини 22, так що той, що перебуває спочатку при визначенні висоти 32 врізання на координаті 34 передній край підтримуючого перекриття 13 переміщається до координати 33 у більше пізній момент часу. Тим самим синхронний аналіз отриманих даних за місцем розташування означає, що синхронізація висоти 32 врізання й висоти 31 щита виробляється тільки тоді, коли секція 10 щитового механізованого кріплення, що запізнюється з затримкою за часом, досягне координати 33, на якій базується покладена в основу порівняння з висотою 31 кріплення висота 32 врізання очисної машини 22. Синхронний аналіз за часом виходить з відповідних значень для висоти 31 щита й висоти 32 врізання, обчислених у даний момент на координаті 33 або координаті 34 відповідно, в однаковий момент часу. При роботі забійного встаткування з'являється робоча ситуація, представлена у вигляді приклада 96527 12 на фіг. 3. Горизонт 43 пласту, розташований між покрівлею 40 і ґрунтом 41 пласту, очищається очисною машиною 22, при цьому висота 32 врізання очисної машини 22, що переміщається у напрямку 44 подвигання забою, настроєна таким чином, щоб виїмка 42 ґрунту пласту виконувалася нижнім барабаном 24. Передній верхній барабан 23 настроєний при цьому таким чином, щоб він залишав під покрівлею 40 вузьку вугільну пачку, яка внаслідок врізання сама відділяється від покрівлі. Таким чином, на фігурі 3 показана настроєна висота 32 врізання. Як видно, що у цьому випадку висота 31 кріплення настроєна на більшу величину, чим висота 32 врізання, так щоб забезпечити проходження очисної машини 22 повз секцію 10 щитового механізованого кріплення без зіткнень. На фіг. 4а й 4б представлені стани, що з'являються у тому випадку, коли очисна машина 22 має ухил у гору щодо секції 10 щитового механізованого кріплення (фіг. 4а), що виражається в утворенні кута 45 неузгодженості між опорним полозом 11 і нижнім барабаном 24 очисної машини 22. Як видно на фіг., у такому випадку збільшується небезпека зіткнення між очисною машиною 22 і секцією 10 щитового механізованого кріплення, і цей ризик може бути зменшений за допомогою зміни висоти врізання. Те ж саме відноситься до ситуації, представленої на фіг. 4б, в якій очисна машина 22 має ухил під гору. Також і тут з'являється відповідний кут 45 неузгодженості, що може бути межовий на підставі зареєстрованих датчиками 17 ухилу або 25 і 21 положень очисної машини 22 і секції 10 щитового механізованого кріплення, а відповідний кут 45 неузгодженості, що з'явився, варто враховувати при керуванні забоєм. На фіг. 5а-5в схематично представлено, що вплив керуючого руху, настроєного на очисній машині за допомогою зміни її висоти врізання або положення врізання, наприклад, у вигляді нижнього врізання, проявляється на секції щитового механізованого кріплення тільки із затримкою у вигляді декількох наступних покрокових переміщень секції щитового механізованого кріплення. Так, у першу чергу, на фіг. 5а видно, що очисна машина 22 повинна виконати щодо ґрунту 41 пласту, на якій розташована секція 10 щитового механізованого кріплення, спрямоване переміщення донизу через два позначених як 50а і 50b горизонти врізання, для чого виконують два запланованих врізання у ґрунт пласту. Як видно на фіг. 5б, секція 10 щитового механізованого кріплення все ще перебуває на ґрунті 41 пласту, у той час як очисна машина 22 уже досягла нового горизонту 50b врізання як новий ґрунт пласту. Таким чином, під час двох очисних переміщень очисної машини 22 спочатку тільки очисна машина 22 і забійний конвеєр 20 реагують на попередньо задані керуючі імпульси. Тільки у фазі роботи, представленої на фіг. 5в, секція 10 щитового механізованого кріплення слідує по напрямку за рухом під гору очисної машини 22, при цьому на фіг. 5б і 5в показано, що вже під час опускання очисної машини 22 і забійного конвеєра 20 щодо первісного ґрунту пласту 41 висотою врізання очисної машини 22 варто управляти таким чином, щоб при наступ 13 них крокових переміщеннях щитового механізованого кріплення у фазі роботи, представленої на фіг. 5в, не виникла надлишкова висота кріплення. Щодо цього на фіг. 5в видно, що там висота врізання очисної машини 22 зменшилася у порівнянні з фігурами 5а й 5б, щоб уникнути занадто великого призабійного простору. Поки секція 10 щитового механізованого кріплення перебуває у представленому на фіг. 5в положенні ухилу з переходом до нового горизонту 50b ґрунту пласту, доводиться піти на відповідне збільшення висоти призабійного простору. З принципової точки зору повинне забезпечуватися вільне настроювання параметрів керування. При цьому швидкість узгодження регулювання за висотою варто настроювати за допомогою максимальної висоти сходини з вільною установкою параметрів. При цьому важливо не вибирати занадто великі окремі східці при рухах нагору для того, щоб забійний конвеєр при подвиганні не виявився у підвішеному стані на одній зі сходин, і забійний конвеєр треба піднімати або ж наявна система керування повинна нахиляти забійний конвеєр. Тепер з посиланням на фіг. 6а-6з необхідно докладніше описати керування процесом при регулюванні призабійного простору, виходячи з наявного спочатку занадто високого призабійного простору. При цьому окремі смуги врізання очисної машини 22 у напрямку очищення позначені один за одним арабськими цифрами 1…8. Верхня лінія врізання верхнього барабана показана суцільною лінією 37, відповідно, нижня лінія врізання нижнього барабана показана суцільною лінією 38. Підтримуюче перекриття 13 і опорний полоз 11 відповідної секції 10 щитової механізованої покрівлі також показані у формі суцільних ліній і позначені відповідними опорними символами. Як, у першу чергу видно на фіг. 6а, попереднє виконання врізання представлене у зазначених без цифр ділянках врізання ліворуч від першої смуги 1 врізання, для якого лінія 38 врізання нижнього барабана задає рівень для ковзного переміщення опорного полоза 11. Як видно, верхня лінія 37 врізання небагато відхиляється від смуги врізання до смуги врізання, однак підтримуюче перекриття 13 явно перебуває вище верхньої лінії 37 врізання, так що висота щита більша, ніж висота врізання. Можна припустити, що вихідна висота для висоти 31 щита становить 3,0 м, у той час як повинна дотримуватися задана висота призабійного простору у розмірі тільки 2,30 м. По представ 96527 14 леній на фіг. 6а смузі 1 врізання видно, що для досягнення мети регулювання настроєне й виконане верхнє врізання для нижнього барабана, так що нижня лінія 38 врізання піднялася щодо вихідного стану. Верхня лінія 37 врізання не змінилася. У представленій на фіг. 6б смузі 2 врізання система ініціювала виконання ще додаткового верхнього врізання на нижньому барабані (лінія 38 врізання). Одночасно видно, що опорний полоз 11 ще не змінив свого положення, тому що опорний полоз 13 усе ще переміщається по спочатку створеному ґрунту пласту. У випадку основної для фігури 6в смуги 3 врізання система визначила, що тепер отримана висота врізання відповідає заданій висоті для призабійного простору, так що у смузі 3 врізання виконується нейтральне врізання з не зміненою висотою врізання. Це відповідним чином також відноситься до представленого на фігурах 6г-6з смугам 4-8 врізання. Щодо реакції секції 10 щитового механізованого кріплення варто помітити, що опорний полоз 11 досягає вирізану у смузі 1 врізання сходину тільки при подвиганні смуги 5 врізання й, тим самим, починає рух у гору, що триває до смуги 8 врізання. У смузі 8 врізання передній край опорного полоза 11 досяг нового рівня ґрунту пласту й тепер виходить за допомогою крокового переміщення по наступних смугах врізання на задану висоту. Вищеописаний процес може спостерігатися й керуватися шляхом контролю положення ухилу очисної машини і її висоти врізання, а також положення ухилу вузлів секції 10 щитового механізованого кріплення. Порівнянний процес переміщення відбувається, якщо потрібно збільшити призабійний простір, виходячи зі спочатку занадто низької висоти щита. Також і у цьому випадку керування починається зі збільшення висоти врізання очисної машини за допомогою зменшення врізання у нижнього барабана, так що опорний полоз секції щитового механізованого кріплення при утримуваному на однаковому рівні підтримуючому перекритті виконує переміщення донизу у попередньо заданою очисною машиною виїмці ґрунту пласту, поки не буде досягнутий новий рівень врізання для крокових переміщень щитового механізованого кріплення. Розкриті у вищевикладеному описі, формулі винаходу, резюме й кресленні ознаки предмета даної документації, як окремо, так і у будь-яких комбінаціях один з одним можуть мати істотне значення для здійснення винаходу в його різних конструктивних формах здійснення. 15 96527 16 17 96527 18 19 96527 20 21 Комп’ютерна верстка А. Крижанівський 96527 Підписне 22 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automated production of a defined face opening in longwall mining operations in underground coal mining
Автори англійськоюJunker, Martin, Mozar, Armin
Назва патенту російськоюСпособ автоматического создания заданного призабойного пространства при очистных забойных роботах в подземной разработке каменного угля
Автори російськоюЮнкер Мартин, Моцар Армин
МПК / Мітки
МПК: E21D 23/00, E21C 35/14, E21C 35/24, E21C 41/16, E21D 23/12
Мітки: створення, підземний, спосіб, призабійного, забійних, кам'яного, вугілля, простору, розробці, заданого, роботах, автоматичного, очисних
Код посилання
<a href="https://ua.patents.su/11-96527-sposib-avtomatichnogo-stvorennya-zadanogo-prizabijjnogo-prostoru-pri-ochisnikh-zabijjnikh-robotakh-u-pidzemnijj-rozrobci-kamyanogo-vugillya.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного створення заданого призабійного простору при очисних забійних роботах у підземній розробці кам’яного вугілля</a>
Запобіжне кріплення для призабійного простору
Номер патенту: 14963
Опубліковано: 04.03.1997
Автори: Петік Володимир Васильович, Вольфсон Павло Михайлович, Сахарчук Віктор Петрович, Щербатюк Георгій Якович, Лопат'єв Ігор Константинович, Борщук Олександр Львович
МПК: E21D 19/00
Мітки: призабійного, простору, кріплення, запобіжне
Формула / Реферат:
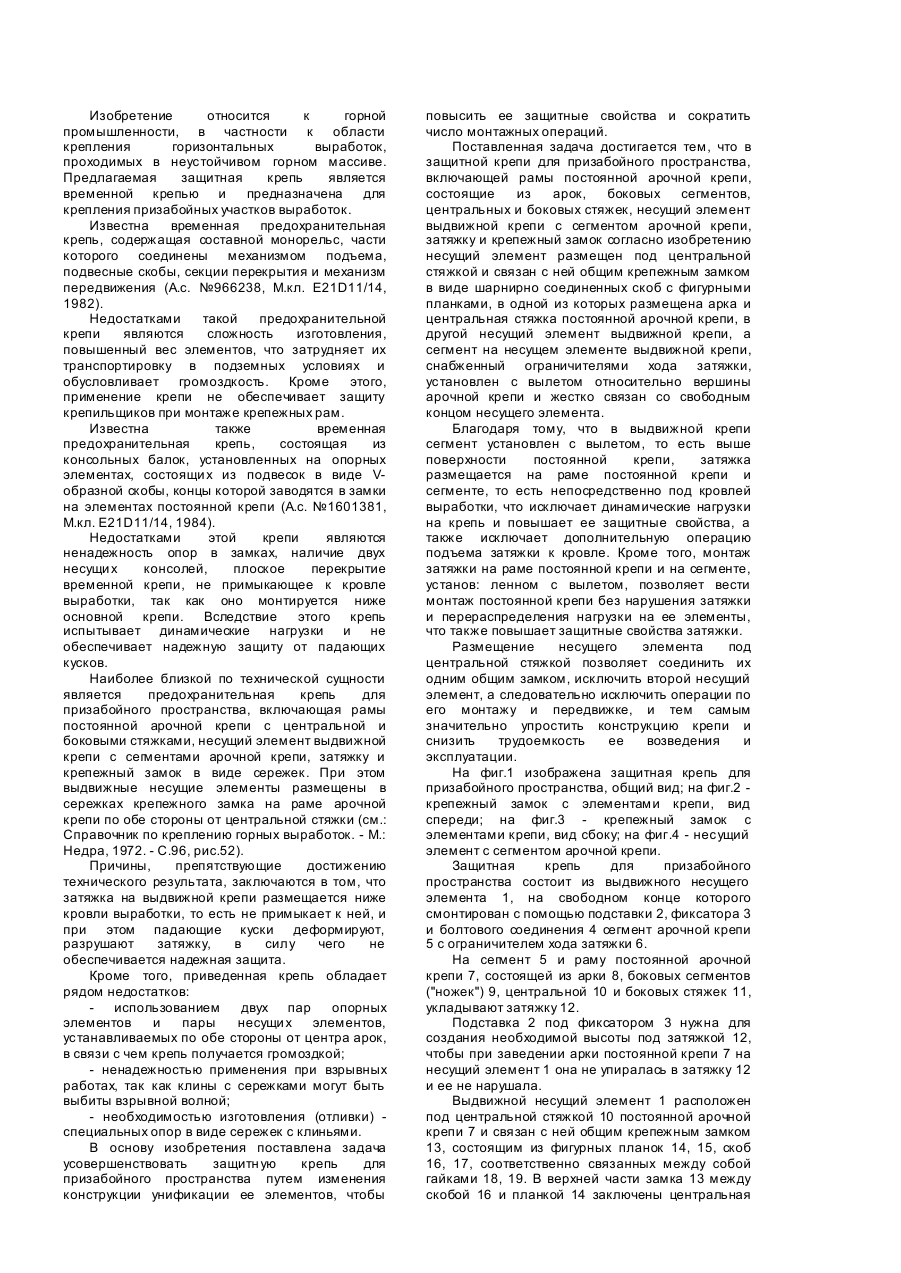
Защитная крепь для призабойного пространства, включающая рамы постоянной арочной крепи, состоящие из арок боковых сегментов, центральных и боковых стяжек, несущий элемент выдвижной крепи, сегмент арочной крепи, затяжку и крепежный замок, отличающаяся тем, что несущий элемент размещен под центральной стяжкой и связан с ней общим крепежным замком в виде шарнирно соединенных скоб с фигурными планками, в одной из которых размещена арка и...
Спосіб контрольованого дотримання зазору між верхнім перекриттям і вугільним вибоєм в очисних вибоях
Номер патенту: 96526
Опубліковано: 10.11.2011
Автори: Юнкер Мартін, Моцар Армін
МПК: E21D 23/00, E21C 41/16, E21D 23/03, E21C 35/24
Мітки: очисних, контрольованого, вибоях, зазору, вугільним, перекриттям, спосіб, верхнім, вибоєм, дотримання
Формула / Реферат:
1. Спосіб контрольованого дотримання кращого з урахуванням механіки гірських порід зазору (33) між верхнім перекриттям і вугільним вибоєм в очисних вибоях, оснащених забійним конвеєром (20), щонайменше однією очисною машиною (22), а також гідравлічним щитовим механізованим кріпленням, при розробці кам'яного вугілля підземним способом, у якомуза допомогою розміщених щонайменше на трьох із чотирьох основних елементів кожної секції (10)...
Спосіб монтажу механізованого кріплення очисних комплексів
Номер патенту: 38084
Опубліковано: 15.05.2001
Автори: Добровольський Микола Олександрович, Оголь Микола Васильович
МПК: E21D 23/00, E21F 13/08
Мітки: монтажу, механізованого, очисних, спосіб, кріплення, комплексів
Текст:
...перевантажувальний дерев'яний полок 9 та доставляють по транспортувальній доріжці 10 до місця установки під захистом раніш встановленнях секцій механізованого кріплення 2 та висувни х балок з металу тимчасового кріплення 11. Після цього секцію механізованого кріплення 8 встановлюють уздовж монтажної камери 2 підключають до гідросистеми та розтискають. Цикл повторюється до завершення робіт. Після того, як монтажна камера 1 буде проведена, а...
Пристрій для перевантаження породи при підземній розробці вугільних родовищ
Номер патенту: 4619
Опубліковано: 28.12.1994
Автори: Глухов Георгій Іванович, Нестеренко Микола Іванович, Овчинніков Віталій Пилипович, Руденко Анатолій Павлович, Галкін Микола Олександрович, Ружелович Петро Степанович, Труфанов Валерій Олексійович
МПК: E21C 41/18
Мітки: підземний, родовищ, перевантаження, вугільних, розробці, породи, пристрій
Формула / Реферат:
1. Устройство для перегрузки породы при подземной разработке угольных месторождений, включающее приемную траншею с наклонной со стороны разгрузки стенкой, перекрытие в верхней части траншеи, выполненное в виде балок, установленных под рельсовым путем, вагонетки, конвейер, расположенный на днище приемной траншеи, и приспособление для разгрузки вагонеток раскрытием их днищ, отличающееся тем, что приемная траншея пройдена перпендикулярно к...
Пристрій для перевантаження гірничої маси при підземній розробці вугільних родовищ
Номер патенту: 148
Опубліковано: 30.04.1993
Автори: Овчинніков Віталій Пилипович, Труфанов Валерій Олексійович, Пророченко Валерій Іванович, Глухов Георгій Іванович, Галкін Микола Олександрович, Ружелович Петро Степанович, Чернуха Юрій Іванович, Нестеренко Микола Іванович, Савінський Віктор Якович, Федосенко Микола Андрійович
МПК: E21F 13/00, E21C 41/18
Мітки: вугільних, підземний, пристрій, гірничої, розробці, перевантаження, маси, родовищ
Формула / Реферат:
Формула изобретения1. Устройство для перегрузки горной массы при подземной разработке угольных месторождений, включающее приемную яму с перекрытием в верхней ее части, рельсовую колею, уложенную на перекрытии, конвейер, установленный в основании приемной ямы, и приспособления для раскрытия днища и разгрузки вагонеток, жестко соединенные с перекрытием, отличающееся тем, что, с целью снижения трудоемкости перегрузочных работ и...
Попередній патент: Спосіб контрольованого дотримання зазору між верхнім перекриттям і вугільним вибоєм в очисних вибоях
Наступний патент: Спосіб керування роботами очисного забою
Випадковий патент: Спосіб профілактики та лікування флюорозу зубів у дітей