Спосіб керування роботами очисного забою
Формула / Реферат
1. Спосіб керування роботами очисного забою, що має забійний конвеєр (20), щонайменше одну очисну машину (22), а також гідравлічне щитове кріплення, у підземній розробці кам'яного вугілля, в якому
за допомогою розміщених щонайменше на трьох із чотирьох основних вузлів кожної секції (10) щитового механізованого кріплення, тобто опорному полозі (11), завальному щиті (14), несучих шарнірних консолях (16) і завальній області підтримуючого перекриття (13), датчиків (17) ухилу визначають ухил вузлів кріплення щодо горизонталі у напрямку покрокового переміщення, і
на основі змінених даних в обчислювальному блоці шляхом порівняння зі збереженими у ньому базовими даними, що визначають геометричну орієнтацію вузлів і їхнє переміщення під час крокового переміщення, розраховують відповідну перпендикулярну стосовно падіння пласта висоту (h1) для секції (10) щитового механізованого кріплення на передньому кінці підтримуючого перекриття (13) як розмір для призабійного простору (30).
2. Спосіб за п. 1, в якому використовують секцію (10) щитового механізованого кріплення з роздільним опорним полозом, при цьому між обома окремими полозами (35, 36) секції (10) щитового механізованого кріплення розміщений кроковий механізм (37) секції щитового механізованого кріплення, а на обох окремих полозах (35, 36) розміщено по одному датчику (17) ухилу.
3. Спосіб згідно з п. 2, у якому для кожного з обох окремих полозів (35, 36) на підставі вимірюваних кутів ухилу для підтримуючого перекриття (13), завального щита (14) і для правого (35) і лівого (36) окремого полоза секції (10) щитового механізованого кріплення розраховують відповідну висоту кріплення.
4. Спосіб згідно з п. 3, у якому визначену для секції (10) щитового механізованого кріплення висоту кріплення розраховують на підставі середнього значення розрахованих для обох окремих полозів (35, 36) значень висоти кріплення.
5. Спосіб за одним із пп. 1-4, у якому в обчислювальному блоці додатково розраховують значення висоти (h2, h3) перпендикулярно стосовно падіння пласта у межах секції (10) щитового механізованого кріплення в області місця кріплення стійок (12) до підтримуючого перекриття (13) і в області шарніра (15) між підтримуючим перекриттям (13) і козирком (14) кріплення.
6. Спосіб за одним із пп. 1-4, у якому розміщені на вузлах (11, 13, 14) кріплення датчики (17) ухилу встановлюють у місцях з мінімальним кутом вигину вузлів.
7. Спосіб за одним із пп. 1-6, який характеризується тим, що за допомогою датчиків тиску визначають внутрішній тиск стійок (12) секції (10) щитового механізованого кріплення.
8. Спосіб за одним із пп. 1-7, у якому залежно від відображуваного внутрішнім тиском стійок сприйняття навантаження секцією (10) щитового механізованого кріплення у розрахунок розмірів (h1, h2, h3) висоти включають відповідному визначеному навантаженню вигин вузлів (11, 13, 14) кріплення у формі залежної від навантаження компенсації похибки.
9. Спосіб за одним із пп. 1-8, у якому за допомогою розміщеного на підтримуючому перекритті (13) секції (10) щитового механізованого кріплення датчика (17) ухилу визначають ухил підтримуючого перекриття (13) щодо горизонталі поперек напрямку крокового переміщення.
10. Спосіб за одним із пп. 1-9, у якому для виконаної у вигляді комбайна (22) з барабанним виконавчим органом очисної машини значення висоти врізання виконуючого верхній частковий вріз випереджального барабана (23) і виконуючого нижній частковий вріз барабана (24) визначають на підставі консолей барабанів, що реєструють положення, показання датчиків, а при проході очисної машини (22) повз кожну секцію (10) щитового механізованого кріплення співвідносять загальну висоту врізання барабанів з обчисленим призабійним простором (30) відповідної секції (10) щитового механізованого кріплення.
11. Спосіб за одним із пп. 1-10, у якому висоту врізання барабанів, визначену для положення працюючої у комбінації з секцією (10) щитового механізованого кріплення очисної машини (22), у ході синхронного аналізу за місцем розташування призначають встановленому наступним для цього положення з тимчасовим запізнюванням кріплення підтримуючого перекриття (13) відповідної секції (10) щитового механізованого кріплення призабійного простору (30).
12. Спосіб за одним із пп. 1-11, у якому ухил конвеєра (20) і/або очисної машини (22) щодо горизонталі у напрямку крокового переміщення секцій (10) щитового механізованого кріплення визначають за допомогою розміщених на конвеєрі (20) і/або очисній машині (22) датчиків (21, 25) ухилу.
13. Спосіб за п. 12, в якому кут ухилу конвеєра (20) і/або очисної машини (22) співвідносять з певним на опорному полозі (11) секції (10) щитового механізованого кріплення й/або на підтримуючому перекритті (13) кутом ухилу, і отриманий на цій основі кут неузгодженості включають у розрахунок виникаючих при декількох один за одним наступних циклах крокового переміщення секції (10) щитового механізованого кріплення призабійного простору (30).
14. Спосіб за одним із пп. 1-13, у якому значення (h1, h2, h3) висоти, що описують геометрію секції (10) щитового механізованого кріплення, на передньому кінці підтримуючого перекриття (13), в області місця кріплення стійок (12) на підтримуючому перекритті (13) і в області шарніра (15) між підтримуючим перекриттям (13) і козирком (14) кріплення реєструють з урахуванням осі часу, і на підставі змін значень вимірювань по осі часу визначають викликуване навантаженням гірської породи зближення.
15. Спосіб за п. 14, в якому зближення представляють у формі параметрів зближення відносно призабійного простору (30) на передньому краї підтримуючого перекриття (13), ухилу підтримуючого перекриття (13) щодо горизонталі у напрямку крокового переміщення, опускання несучих підтримуючих перекриття (13) стійок (12) і завального кінця підтримуючого перекриття (13).
16. Спосіб за п. 14 або п. 15, в якому на підставі параметрів зближення й/або ухилу підтримуючого перекриття (13) у напрямку крокового переміщення визначають положення секції (10) щитового механізованого кріплення щодо прикладення опорних сил кріплення.
17. Спосіб за одним із пп. 1-6, у якому як датчики (17) ухилу використовують датчики прискорення, які на підставі відхилення від прискорення сили ваги реєструють кутове положення датчика прискорення у просторі.
18. Спосіб за п. 17, в якому для виключення викликаних коливаннями використовуваних вузлів похибок визначені датчиками прискорення значення вимірювання перевіряють і виправляють за допомогою відповідного методу загасання.
19. Спосіб за одним із пп. 1-18, у якому положення окремих секцій (10) щитового механізованого кріплення оптично відображають у пристрої індикації.
20. Спосіб за п. 19, в якому розпізнані відхилення, що ведуть до ризику від попередньо встановлених заданих значень, відображають у пристрої індикації кольором, що виділяється.
Текст
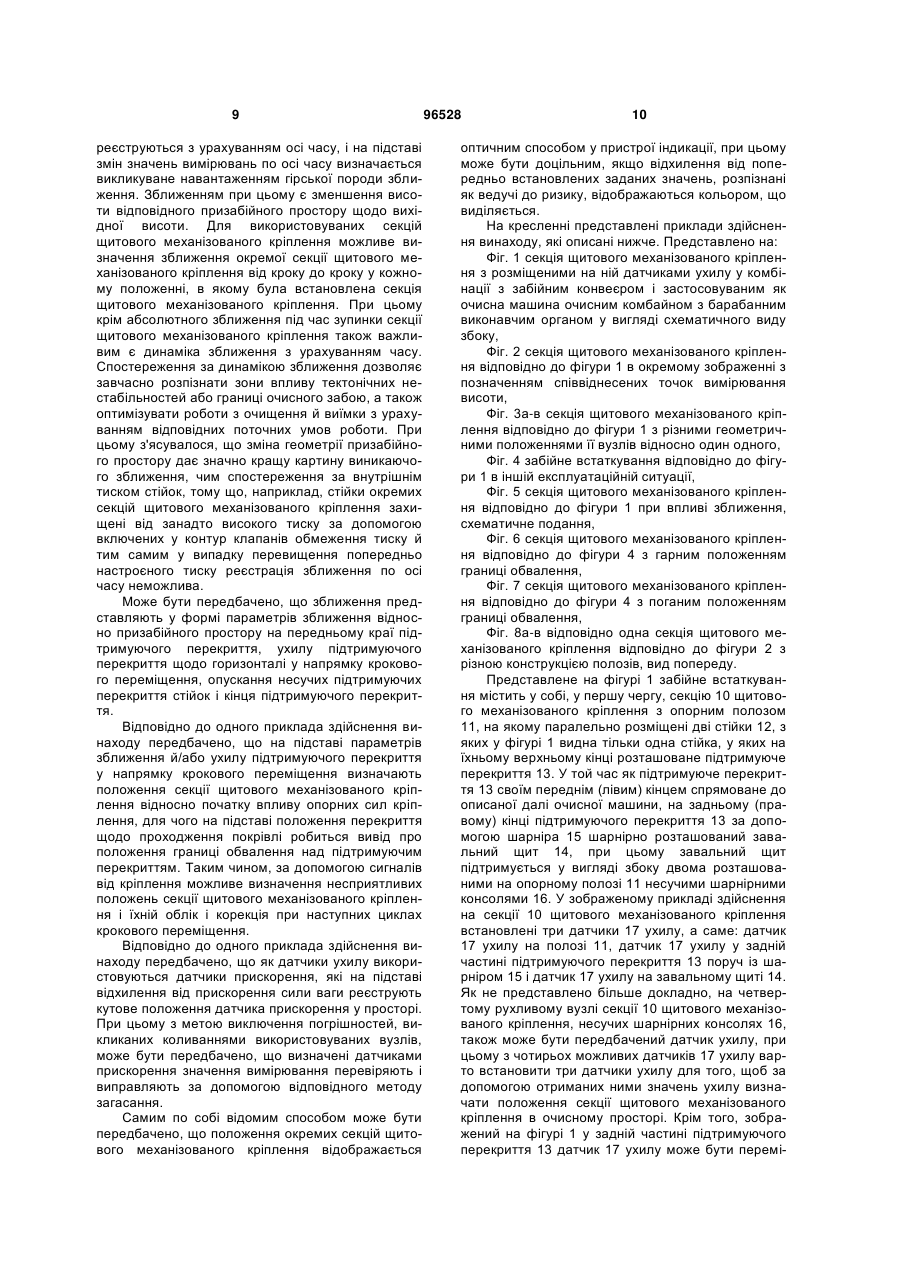
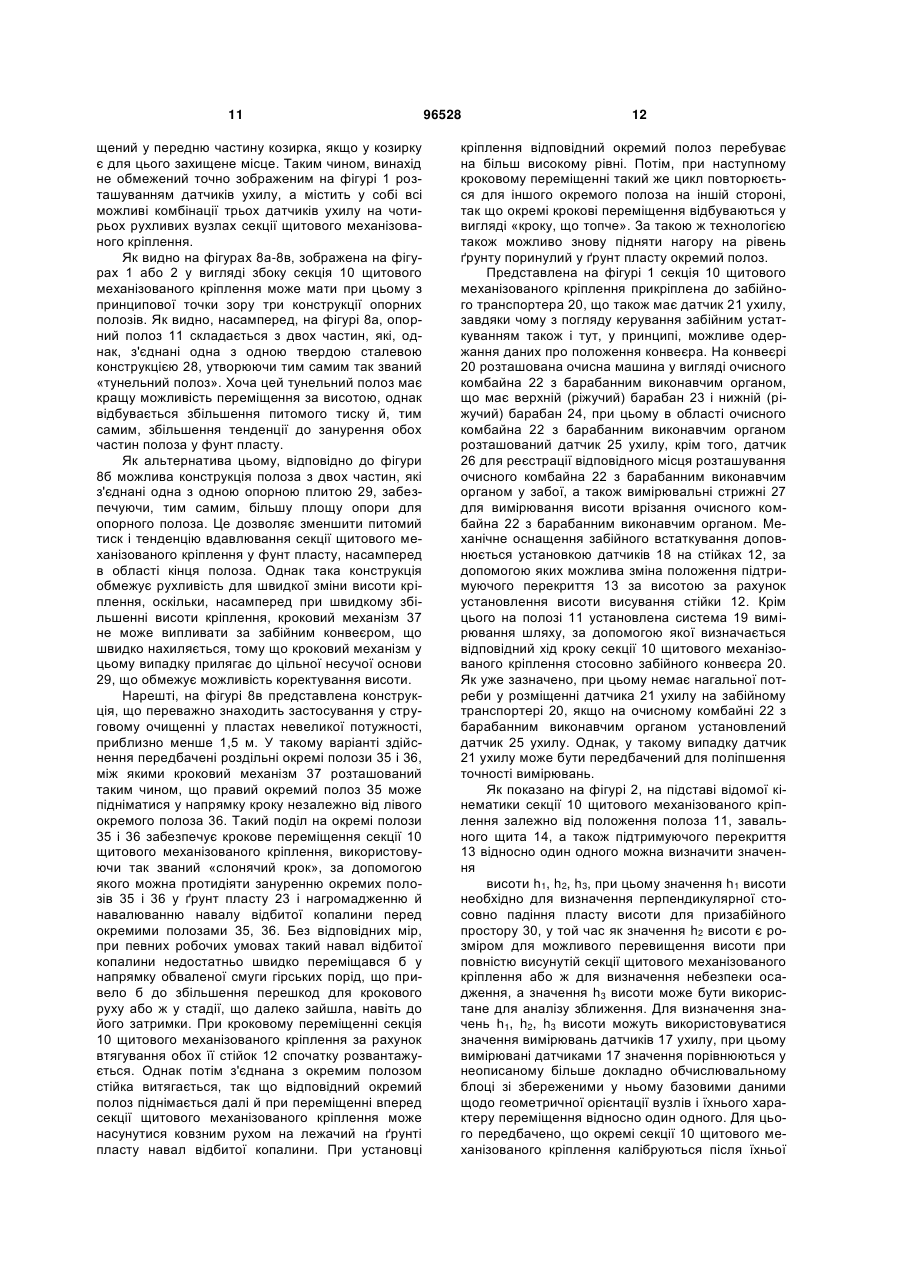
1. Спосіб керування роботами очисного забою, що має забійний конвеєр (20), щонайменше одну очисну машину (22), а також гідравлічне щитове кріплення, у підземній розробці кам'яного вугілля, в якому за допомогою розміщених щонайменше на трьох із чотирьох основних вузлів кожної секції (10) щитового механізованого кріплення, тобто опорному полозі (11), завальному щиті (14), несучих шарнірних консолях (16) і завальній області підтримуючого перекриття (13), датчиків (17) ухилу визначають ухил вузлів кріплення щодо горизонталі у напрямку покрокового переміщення, і на основі змінених даних в обчислювальному блоці шляхом порівняння зі збереженими у ньому базовими даними, що визначають геометричну орієнтацію вузлів і їхнє переміщення під час крокового переміщення, розраховують відповідну перпендикулярну стосовно падіння пласта висоту (h1) для секції (10) щитового механізованого кріплення на передньому кінці підтримуючого перекриття (13) як розмір для призабійного простору (30). 2. Спосіб за п. 1, в якому використовують секцію (10) щитового механізованого кріплення з роздільним опорним полозом, при цьому між обома окремими полозами (35, 36) секції (10) щитового механізованого кріплення розміщений кроковий механізм (37) секції щитового механізованого кріплення, а на обох окремих полозах (35, 36) розміщено по одному датчику (17) ухилу. 3. Спосіб згідно з п. 2, у якому для кожного з обох окремих полозів (35, 36) на підставі вимірюваних 2 (19) 1 3 96528 4 ня, показання датчиків, а при проході очисної машини (22) повз кожну секцію (10) щитового механізованого кріплення співвідносять загальну висоту врізання барабанів з обчисленим призабійним простором (30) відповідної секції (10) щитового механізованого кріплення. 11. Спосіб за одним із пп. 1-10, у якому висоту врізання барабанів, визначену для положення працюючої у комбінації з секцією (10) щитового механізованого кріплення очисної машини (22), у ході синхронного аналізу за місцем розташування призначають встановленому наступним для цього положення з тимчасовим запізнюванням кріплення підтримуючого перекриття (13) відповідної секції (10) щитового механізованого кріплення призабійного простору (30). 12. Спосіб за одним із пп. 1-11, у якому ухил конвеєра (20) і/або очисної машини (22) щодо горизонталі у напрямку крокового переміщення секцій (10) щитового механізованого кріплення визначають за допомогою розміщених на конвеєрі (20) і/або очисній машині (22) датчиків (21, 25) ухилу. 13. Спосіб за п. 12, в якому кут ухилу конвеєра (20) і/або очисної машини (22) співвідносять з певним на опорному полозі (11) секції (10) щитового механізованого кріплення й/або на підтримуючому перекритті (13) кутом ухилу, і отриманий на цій основі кут неузгодженості включають у розрахунок виникаючих при декількох один за одним наступних циклах крокового переміщення секції (10) щитового механізованого кріплення призабійного простору (30). 14. Спосіб за одним із пп. 1-13, у якому значення (h1, h2, h3) висоти, що описують геометрію секції (10) щитового механізованого кріплення, на передньому кінці підтримуючого перекриття (13), в області місця кріплення стійок (12) на підтримую чому перекритті (13) і в області шарніра (15) між підтримуючим перекриттям (13) і козирком (14) кріплення реєструють з урахуванням осі часу, і на підставі змін значень вимірювань по осі часу визначають викликуване навантаженням гірської породи зближення. 15. Спосіб за п. 14, в якому зближення представляють у формі параметрів зближення відносно призабійного простору (30) на передньому краї підтримуючого перекриття (13), ухилу підтримуючого перекриття (13) щодо горизонталі у напрямку крокового переміщення, опускання несучих підтримуючих перекриття (13) стійок (12) і завального кінця підтримуючого перекриття (13). 16. Спосіб за п. 14 або п. 15, в якому на підставі параметрів зближення й/або ухилу підтримуючого перекриття (13) у напрямку крокового переміщення визначають положення секції (10) щитового механізованого кріплення щодо прикладення опорних сил кріплення. 17. Спосіб за одним із пп. 1-6, у якому як датчики (17) ухилу використовують датчики прискорення, які на підставі відхилення від прискорення сили ваги реєструють кутове положення датчика прискорення у просторі. 18. Спосіб за п. 17, в якому для виключення викликаних коливаннями використовуваних вузлів похибок визначені датчиками прискорення значення вимірювання перевіряють і виправляють за допомогою відповідного методу загасання. 19. Спосіб за одним із пп. 1-18, у якому положення окремих секцій (10) щитового механізованого кріплення оптично відображають у пристрої індикації. 20. Спосіб за п. 19, в якому розпізнані відхилення, що ведуть до ризику від попередньо встановлених заданих значень, відображають у пристрої індикації кольором, що виділяється. Винахід належить до способу керування роботами очисного забою, що має забійний конвеєр, щонайменше одну очисну машину, а також гідравлічне щитове кріплення, у підземній розробці кам'яного вугілля. При керуванні роботами очисного забою у ході очисних робіт мова йде, у загальному й цілому, про найкраще використання наявних можливостей машинного встаткування із запобіганням можливих простоїв, при цьому для запобігання прийняття невірних рішень людиною по можливості варто забезпечити автоматизацію необхідних процесів керування. Розробляються або вже застосовуються передумови для автоматизації керування, такі як, наприклад, сенсорне розпізнавання границі пласту/керування роботою на границі пласту, спосіб покрокового навчання, розпізнавання дороги назад механізованого кріплення й керування цим процесом, автоматизоване переміщення механізованого кріплення й автоматичне дотримання попередньо встановленого заданого кута нахилу забійного конвеєра. Зокрема, однією з проблем при автоматизації систем керування забоєм є забезпечення наявності у передній області підтримуючого перекриття кожної окремої секції щитового механізованого кріплення достатньої перпендикулярної стосовно падіння пласту висоти, тобто достатнього призабійного простору, щоб забезпечити безперешкодне проходження очисної машини, тому що кожне зіткнення очисної машини з підтримуючим перекриттям секції щитового механізованого кріплення через занадто малий призабійний простір веде до відповідних перебоїв у роботі або ж також до ушкоджень встаткування. Тому в основі винаходу лежить завдання розробки способу названого на початку виду, що надає відомості про можливе зіткнення між очисною машиною й секцією щитового механізованого кріплення й, тим самим, допомагає запобігти відповідним зіткненням. Рішення цього завдання, включаючи кращі варіанти здійснення й удосконалення винаходу, випливає зі змісту формули винаходу, що викладена після цього опису. Насамперед, винахід передбачає спосіб, у якому розміщені щонайменше на трьох із чотирьох основних вузлів кожної секції щитового механізованого кріплення, тобто опорному полозі, завальному щиті, несучих шарнірних консолях і завальній 5 області підтримуючого перекриття, датчики ухилу визначають ухил вузлів кріплення щодо горизонталі у напрямку покрокового переміщення, і на основі змінених даних в обчислювальному блоці шляхом порівняння зі збереженими у ньому базовими даними, що визначають геометричну орієнтацію вузлів і їхнє переміщення під час крокового переміщення, розраховується відповідна перпендикулярна стосовно падіння пласту висота для секції щитового механізованого кріплення на передньому кінці підтримуючого перекриття як розмір для призабійного простору. З винаходом зв'язана, у першу чергу, та перевага, що тільки на підставі обумовлених з порівняно невеликими витратами геометричних співвідношень при використанні секцій щитового механізованого кріплення, що перебуває на передньому кінці підтримуючого перекриття призабійний простір визначається у формі певної для даного місця перпендикулярної стосовно падіння пласту висоти, поки цей призабійний простір відповідає створеному очисною машиною при її плановій роботі призабійному простору або трохи більше його, ризик зіткнення очисної машини з відповідними секціями щитового механізованого кріплення відсутній. Якщо при постійному контролі призабійного простору на передньому кінці підтримуючого перекриття виявляється занадто малий призабійний простір, за допомогою відповідних дій по керуванню очисною машиною можна запобігти неминуче зіткнення. Крім того, ще однією перевагою є те, що отримані на окремих секціях щитового механізованого кріплення дані надають додаткову інформацію про поводження окремих ділянок фронту очисних робіт або ж усього фронту очисних робіт при поступальних очисних роботах, що дозволяє виконувати єдине керування технологічним процесом відповідного гірничодобувного підприємства. Таким чином, на підставі співвідношення призабійного простору щодо наявних для відповідного гірничодобувного підприємства даних про родовище, наприклад про зміну потужності пласту за довжиною очисного забою, можна укласти, чи існує небезпека осідання покрівлі на секціях щитового механізованого кріпленняабо ж чи не загрожує перевищення верхньої границі установки секцій щитового механізованого кріплення при необхідному автоматичному режимі роботи. Небезпека осідання покрівлі існує тоді, коли при зближенні, що з'явилося, верхні частини щитового кріплення повністю висунуті, і через налягання покрівлі секція щитового механізованого кріплення блокована і її переміщення вперед більше неможливо. Інша можливість полягає у тому, що сталева конструкція на нижній границі установки у лемніскатному редукторі секції щитового механізованого кріплення або у шарнірі підтримуючого перекриття/завального щита заблокована й також більше не може переміщатися вперед. Описані вище небезпечні моменти мають особливе відношення до проходження сідловин або западин у пласті, уникнути їх можна за допомогою відповідного настроювання висоти очищення відповідної використовуваної очисної машини. Крім того, відповідні дані 96528 6 призабійного простору дозволяють одержати відомості про можливе обвалення покрівлі слідом за виїмкою, появі звужень пласту, проходженні очисної машини безпосередньо по вугіллю або ж про можливу виїмку фунту пласту очисною машиною. Відповідно до одного приклада здійснення винаходу передбачено, що також використовуються секції щитового механізованого кріплення з роздільними опорними полозами, в яких між обома окремими полозами розміщений крокуючий механізм секції щитового механізованого кріплення, завдяки чому обоє окремих полоза секції щитового механізованого кріплення, на відміну від з'єднаних один з одним полозів, можуть втягуватися окремо один від одного, що уможливлює так званий «слонячий крок» як крокове керування. При таких секціях щитового механізованого кріплення, що використовуються насамперед у типових для стругового очищення пластах невеликої потужності, на обох окремих полозах встановлюється по одному датчику ухилу. Для цього можна передбачити, що для кожного з обох окремих полозів розраховується відповідна висота кріплення на підставі вимірюваного кутів ухилу для підтримуючого перекриття, завального щита й для правого й лівого окремого полоза секції щитового механізованого кріплення, при цьому можна передбачити, що певна для секції щитового механізованого кріплення висота кріплення розраховується на основі середнього значення з розрахованих для обох окремих полозів значень висоти кріплення. Однак для розпізнавання обумовлених насадками стійок проблем або для оцінки того, чи досягнута верхня границя установки секції щитового механізованого кріплення, потрібен окремий аналіз висоти кріплення для правої й лівої половини кріплення на основі кутів нахилу, визначених на окремих полозах. Якщо відповідно до приклада здійснення винаходу передбачено, що в обчислювальному блоці додатково розраховують значення перпендикулярної стосовно падіння пласту висоти у межах секції щитового механізованого кріплення в області місця кріплення стійок у покрівлі й в області шарніра між підтримуючим перекриттям і козирком кріплення, перевагою такого підходу є те, що на підставі даних про висоту підтримуючого перекриття за всією його довжиною можна одержати відомості про поводження окремої секції щитового механізованого кріплення під час декількох наступних один за одним циклів покрокового пересування, наприклад чи переміщається щитове механізоване кріплення під ухил або у гору. Якщо відповідно до приклада здійснення винаходу передбачено, що розміщені на вузлах кріплення датчики ухилу встановлюють у місцях з мінімальним кутом вигину вузлів. Це служить мінімізації помилок вимірювання під впливом навантаження. Тому що визначення висоти повинно виконуватися з найбільшою точністю, і через навантаження на окремі секції щитового механізованого кріплення внаслідок згинаючої напруги окремих вузлів секцій щитового механізованого кріплення можлива поява помилок зі зменшенням висоти, 7 відповідно до одного приклада здійснення винаходу передбачене визначення внутрішнього тиску стійок секції щитового механізованого кріплення за допомогою датчиків тиску. На підставі раніше встановленого стандартного поводження відповідних секцій щитового механізованого кріплення при різних станах навантаження можливе застосування поправочного коефіцієнта, що враховує згинаючу напругу у ході практичного використання секції щитового механізованого кріплення залежно від відповідного навантаження, прийнятого під час роботи, як передбачено відповідно до приклада здійснення винаходу. Відповідно до одного приклада здійснення винаходу за допомогою розміщеного на підтримуючому перекритті секції щитового механізованого кріплення датчика ухилу визначається ухил підтримуючого перекриття щодо горизонталі поперек напрямку крокового переміщення. При виконанні переміщень секції щитового механізованого кріплення це дозволяє визначити, чи перебуває переміщувана секція щитового механізованого кріплення все ще в області перекриття щілин між сусідніми секціями щитового механізованого кріплення. Якщо дві сусідніх секції щитового механізованого кріплення мають більші розходження за висотою або кутовому положенні, існує великий ризик того, що при автоматичному переміщенні вперед секції щитового механізованого кріплення вийдуть зі зони взаємного перекриття щілин і зіштовхнуться один з одним. Так, наприклад, при виявленні критичної ситуації накладення можливе зменшення висоти втягування підтримуючого перекриття, або з'єднане з сусідніми секціями щитового механізованого кріплення підтримуюче перекриття перед циклом крокового переміщення може бути випрямлено, або цикл крокового переміщення може бути перерваний перед повторною установкою відповідної секції щитового механізованого кріплення, якщо ця секція щитового механізованого кріплення вже не з'єднана з іншими; тоді також потрібне коректування. Якщо для очисних робіт як очисна машина застосовується підлягаючий керуванню точно за розмірами очисний комбайн із барабанним виконавчим органом, відповідно до одного приклада здійснення винаходу передбачено, що для виконаної у вигляді комбайна з барабанним виконавчим органом очисної машини значення висоти врізання виконуючого верхній частковий вріз випереджального барабана й виконуючого нижній частковий вріз барабана визначають на підставі консолей барабанів, що реєструють положення, показання датчиків, а при проході очисної машини повз кожну секцію щитового механізованого кріплення співвідносять загальну висоту врізання барабанів з обчисленим призабійним простором відповідної секції щитового механізованого кріплення. За рахунок цього можливе узгодження переміщення очисної машини по очисному забою з положенням окремих секцій щитового механізованого кріплення. Крім того, відповідно до одного приклада здійснення винаходу передбачено, що висоту врізання барабанів, визначену для положення працюючої у 96528 8 комбінації з секцією щитового механізованого кріплення очисної машини, у ході синхронного аналізу за місцем розташування призначають установленому наступним для цього положення з тимчасовим запізнюванням кріплення підтримуючого перекриття відповідної секції щитового механізованого кріплення призабійного простору. Тим самим враховується та обставина, що створюваний очисною машиною призабійний простір буде досягнутий краєм підтримуючого перекриття відповідної секції щитового механізованого кріплення всього лише через один або два кроки кріплення, що називається запізнюванням кріплення. Для порівняльної оцінки створюваного очисною машиною призабійного простору й призабійного простору, що кріпиться щитовим кріпленням, можливе залучення тільки даних про висоту того самого місця. Для цього у згаданому вище обчислювальному блоці зберігаються історичні дані про висоту врізання, які порівнюються з даними щитового кріплення в однакових просторових координатах, як тільки секція щитового механізованого кріплення досягає відповідних просторових координат. Цей порядок роботи також може бути названий синхронним аналізом за місцем розташування. Крім цього, спосіб керування відповідно до винаходу поліпшується за рахунок того, що ухил конвеєра й/або очисної машини щодо горизонталі у напрямку крокового переміщення секцій щитового механізованого кріплення визначають за допомогою розміщених на конвеєрі й/або очисній машині датчиків ухилу. При цьому досить розміщення одного датчика ухилу на очисній машині. Хоча очисна машина, що переміщається на забійному конвеєрі й направляється за ним, деяким чином утворить єдине ціле з забійним конвеєром, для поліпшення точності керування може бути доцільним також забезпечити реєстрацію ухилу забійного конвеєра за допомогою розміщеного на ньому датчика ухилу. При необхідності для потреб керування досить розміщення датчика ухилу тільки на забійному конвеєрі. При цьому може бути передбачено, що кут ухилу конвеєра й/або очисної машини співвідносять з певним на полозі секції щитового механізованого кріплення й/або на підтримуючому перекритті кутом ухилу, а отриманий на цій основі кут неузгодженості включається у розрахунок призабійного простору, що виникає при декількох один за одним наступних циклах крокового переміщення секції щитового механізованого кріплення. Із цим зв'язана та перевага, що поліпшується керування перетинанням западин або сідловин пласту, тому що поводження фронту очисних робіт розпізнається заздалегідь, завдяки чому за допомогою завчасного керування очисними діями можна вплинути на розташування й поперечний переріз призабійного простору. Відповідно до одного приклада здійснення винаходу передбачено, що значення висоти, яке описує геометрію секції щитового механізованого кріплення, на передньому кінці підтримуючого перекриття, в області місця кріплення стійок на підтримуючому перекритті й в області шарніра між підтримуючим перекриттям і козирком кріплення 9 реєструються з урахуванням осі часу, і на підставі змін значень вимірювань по осі часу визначається викликуване навантаженням гірської породи зближення. Зближенням при цьому є зменшення висоти відповідного призабійного простору щодо вихідної висоти. Для використовуваних секцій щитового механізованого кріплення можливе визначення зближення окремої секції щитового механізованого кріплення від кроку до кроку у кожному положенні, в якому була встановлена секція щитового механізованого кріплення. При цьому крім абсолютного зближення під час зупинки секції щитового механізованого кріплення також важливим є динаміка зближення з урахуванням часу. Спостереження за динамікою зближення дозволяє завчасно розпізнати зони впливу тектонічних нестабільностей або границі очисного забою, а також оптимізувати роботи з очищення й виїмки з урахуванням відповідних поточних умов роботи. При цьому з'ясувалося, що зміна геометрії призабійного простору дає значно кращу картину виникаючого зближення, чим спостереження за внутрішнім тиском стійок, тому що, наприклад, стійки окремих секцій щитового механізованого кріплення захищені від занадто високого тиску за допомогою включених у контур клапанів обмеження тиску й тим самим у випадку перевищення попередньо настроєного тиску реєстрація зближення по осі часу неможлива. Може бути передбачено, що зближення представляють у формі параметрів зближення відносно призабійного простору на передньому краї підтримуючого перекриття, ухилу підтримуючого перекриття щодо горизонталі у напрямку крокового переміщення, опускання несучих підтримуючих перекриття стійок і кінця підтримуючого перекриття. Відповідно до одного приклада здійснення винаходу передбачено, що на підставі параметрів зближення й/або ухилу підтримуючого перекриття у напрямку крокового переміщення визначають положення секції щитового механізованого кріплення відносно початку впливу опорних сил кріплення, для чого на підставі положення перекриття щодо проходження покрівлі робиться вивід про положення границі обвалення над підтримуючим перекриттям. Таким чином, за допомогою сигналів від кріплення можливе визначення несприятливих положень секції щитового механізованого кріплення і їхній облік і корекція при наступних циклах крокового переміщення. Відповідно до одного приклада здійснення винаходу передбачено, що як датчики ухилу використовуються датчики прискорення, які на підставі відхилення від прискорення сили ваги реєструють кутове положення датчика прискорення у просторі. При цьому з метою виключення погрішностей, викликаних коливаннями використовуваних вузлів, може бути передбачено, що визначені датчиками прискорення значення вимірювання перевіряють і виправляють за допомогою відповідного методу загасання. Самим по собі відомим способом може бути передбачено, що положення окремих секцій щитового механізованого кріплення відображається 96528 10 оптичним способом у пристрої індикації, при цьому може бути доцільним, якщо відхилення від попередньо встановлених заданих значень, розпізнані як ведучі до ризику, відображаються кольором, що виділяється. На кресленні представлені приклади здійснення винаходу, які описані нижче. Представлено на: Фіг. 1 секція щитового механізованого кріплення з розміщеними на ній датчиками ухилу у комбінації з забійним конвеєром і застосовуваним як очисна машина очисним комбайном з барабанним виконавчим органом у вигляді схематичного виду збоку, Фіг. 2 секція щитового механізованого кріплення відповідно до фігури 1 в окремому зображенні з позначенням співвіднесених точок вимірювання висоти, Фіг. 3а-в секція щитового механізованого кріплення відповідно до фігури 1 з різними геометричними положеннями її вузлів відносно один одного, Фіг. 4 забійне встаткування відповідно до фігури 1 в іншій експлуатаційній ситуації, Фіг. 5 секція щитового механізованого кріплення відповідно до фігури 1 при впливі зближення, схематичне подання, Фіг. 6 секція щитового механізованого кріплення відповідно до фігури 4 з гарним положенням границі обвалення, Фіг. 7 секція щитового механізованого кріплення відповідно до фігури 4 з поганим положенням границі обвалення, Фіг. 8а-в відповідно одна секція щитового механізованого кріплення відповідно до фігури 2 з різною конструкцією полозів, вид попереду. Представлене на фігурі 1 забійне встаткування містить у собі, у першу чергу, секцію 10 щитового механізованого кріплення з опорним полозом 11, на якому паралельно розміщені дві стійки 12, з яких у фігурі 1 видна тільки одна стійка, у яких на їхньому верхньому кінці розташоване підтримуюче перекриття 13. У той час як підтримуюче перекриття 13 своїм переднім (лівим) кінцем спрямоване до описаної далі очисної машини, на задньому (правому) кінці підтримуючого перекриття 13 за допомогою шарніра 15 шарнірно розташований завальний щит 14, при цьому завальний щит підтримується у вигляді збоку двома розташованими на опорному полозі 11 несучими шарнірними консолями 16. У зображеному прикладі здійснення на секції 10 щитового механізованого кріплення встановлені три датчики 17 ухилу, а саме: датчик 17 ухилу на полозі 11, датчик 17 ухилу у задній частині підтримуючого перекриття 13 поруч із шарніром 15 і датчик 17 ухилу на завальному щиті 14. Як не представлено більше докладно, на четвертому рухливому вузлі секції 10 щитового механізованого кріплення, несучих шарнірних консолях 16, також може бути передбачений датчик ухилу, при цьому з чотирьох можливих датчиків 17 ухилу варто встановити три датчики ухилу для того, щоб за допомогою отриманих ними значень ухилу визначати положення секції щитового механізованого кріплення в очисному просторі. Крім того, зображений на фігурі 1 у задній частині підтримуючого перекриття 13 датчик 17 ухилу може бути перемі 11 щений у передню частину козирка, якщо у козирку є для цього захищене місце. Таким чином, винахід не обмежений точно зображеним на фігурі 1 розташуванням датчиків ухилу, а містить у собі всі можливі комбінації трьох датчиків ухилу на чотирьох рухливих вузлах секції щитового механізованого кріплення. Як видно на фігурах 8а-8в, зображена на фігурах 1 або 2 у вигляді збоку секція 10 щитового механізованого кріплення може мати при цьому з принципової точки зору три конструкції опорних полозів. Як видно, насамперед, на фігурі 8а, опорний полоз 11 складається з двох частин, які, однак, з'єднані одна з одною твердою сталевою конструкцією 28, утворюючи тим самим так званий «тунельний полоз». Хоча цей тунельний полоз має кращу можливість переміщення за висотою, однак відбувається збільшення питомого тиску й, тим самим, збільшення тенденції до занурення обох частин полоза у фунт пласту. Як альтернатива цьому, відповідно до фігури 8б можлива конструкція полоза з двох частин, які з'єднані одна з одною опорною плитою 29, забезпечуючи, тим самим, більшу площу опори для опорного полоза. Це дозволяє зменшити питомий тиск і тенденцію вдавлювання секції щитового механізованого кріплення у фунт пласту, насамперед в області кінця полоза. Однак така конструкція обмежує рухливість для швидкої зміни висоти кріплення, оскільки, насамперед при швидкому збільшенні висоти кріплення, кроковий механізм 37 не може випливати за забійним конвеєром, що швидко нахиляється, тому що кроковий механізм у цьому випадку прилягає до цільної несучої основи 29, що обмежує можливість коректування висоти. Нарешті, на фігурі 8в представлена конструкція, що переважно знаходить застосування у струговому очищенні у пластах невеликої потужності, приблизно менше 1,5 м. У такому варіанті здійснення передбачені роздільні окремі полози 35 і 36, між якими кроковий механізм 37 розташований таким чином, що правий окремий полоз 35 може підніматися у напрямку кроку незалежно від лівого окремого полоза 36. Такий поділ на окремі полози 35 і 36 забезпечує крокове переміщення секції 10 щитового механізованого кріплення, використовуючи так званий «слонячий крок», за допомогою якого можна протидіяти зануренню окремих полозів 35 і 36 у ґрунт пласту 23 і нагромадженню й навалюванню навалу відбитої копалини перед окремими полозами 35, 36. Без відповідних мір, при певних робочих умовах такий навал відбитої копалини недостатньо швидко переміщався б у напрямку обваленої смуги гірських порід, що привело б до збільшення перешкод для крокового руху або ж у стадії, що далеко зайшла, навіть до його затримки. При кроковому переміщенні секція 10 щитового механізованого кріплення за рахунок втягування обох її стійок 12 спочатку розвантажується. Однак потім з'єднана з окремим полозом стійка витягається, так що відповідний окремий полоз піднімається далі й при переміщенні вперед секції щитового механізованого кріплення може насунутися ковзним рухом на лежачий на ґрунті пласту навал відбитої копалини. При установці 96528 12 кріплення відповідний окремий полоз перебуває на більш високому рівні. Потім, при наступному кроковому переміщенні такий же цикл повторюється для іншого окремого полоза на іншій стороні, так що окремі крокові переміщення відбуваються у вигляді «кроку, що топче». За такою ж технологією також можливо знову підняти нагору на рівень ґрунту поринулий у ґрунт пласту окремий полоз. Представлена на фігурі 1 секція 10 щитового механізованого кріплення прикріплена до забійного транспортера 20, що також має датчик 21 ухилу, завдяки чому з погляду керування забійним устаткуванням також і тут, у принципі, можливе одержання даних про положення конвеєра. На конвеєрі 20 розташована очисна машина у вигляді очисного комбайна 22 з барабанним виконавчим органом, що має верхній (ріжучий) барабан 23 і нижній (ріжучий) барабан 24, при цьому в області очисного комбайна 22 з барабанним виконавчим органом розташований датчик 25 ухилу, крім того, датчик 26 для реєстрації відповідного місця розташування очисного комбайна 22 з барабанним виконавчим органом у забої, а також вимірювальні стрижні 27 для вимірювання висоти врізання очисного комбайна 22 з барабанним виконавчим органом. Механічне оснащення забійного встаткування доповнюється установкою датчиків 18 на стійках 12, за допомогою яких можлива зміна положення підтримуючого перекриття 13 за висотою за рахунок установлення висоти висування стійки 12. Крім цього на полозі 11 установлена система 19 вимірювання шляху, за допомогою якої визначається відповідний хід кроку секції 10 щитового механізованого кріплення стосовно забійного конвеєра 20. Як уже зазначено, при цьому немає нагальної потреби у розміщенні датчика 21 ухилу на забійному транспортері 20, якщо на очисному комбайні 22 з барабанним виконавчим органом установлений датчик 25 ухилу. Однак, у такому випадку датчик 21 ухилу може бути передбачений для поліпшення точності вимірювань. Як показано на фігурі 2, на підставі відомої кінематики секції 10 щитового механізованого кріплення залежно від положення полоза 11, завального щита 14, а також підтримуючого перекриття 13 відносно один одного можна визначити значення висоти h1, h2, h3, при цьому значення h1 висоти необхідно для визначення перпендикулярної стосовно падіння пласту висоти для призабійного простору 30, у той час як значення h2 висоти є розміром для можливого перевищення висоти при повністю висунутій секції щитового механізованого кріплення або ж для визначення небезпеки осадження, а значення h3 висоти може бути використане для аналізу зближення. Для визначення значень h1, h2, h3 висоти можуть використовуватися значення вимірювань датчиків 17 ухилу, при цьому вимірювані датчиками 17 значення порівнюються у неописаному більше докладно обчислювальному блоці зі збереженими у ньому базовими даними щодо геометричної орієнтації вузлів і їхнього характеру переміщення відносно один одного. Для цього передбачено, що окремі секції 10 щитового механізованого кріплення калібруються після їхньої 13 установки у забійне встаткування, для чого підтримуюче перекриття 13, завальний щит 14 і полоз 11 вимірюються у змонтованому стані за допомогою ручного інклінометра, і значення вимірювань вводяться у відповідну систему керування секції 10 щитового механізованого кріплення. Як тільки у системі керування щитовим кріпленням потім відображаються значення hi, h2, і h3 висоти, ці значення висоти можуть бути додатково вимірювані рулетками, і потім датчики ухилу відповідним чином можуть бути відкалібровані. Якщо через згинаючу напругу вузлів при виниклому навантаженні можлива поява змін в ухилі вузлів, можна передбачити облік відповідних кутових помилок або помилок при визначенні значень висоти за рахунок введення залежного від навантаження коефіцієнта погрішностей, для чого виникаюче під час роботи навантаження визначається за допомогою реєстрації внутрішнього тиску стійок 12 секції 10 щитового механізованого кріплення відповідними передбаченими датчиками, і на підставі нормативних значень для поводження вузлів секції 10 щитового механізованого кріплення при певних навантаженнях визначається відповідний поправочний коефіцієнт. Як видно на фігурах 3а, 3б і 3в, за допомогою реєстрації зміни кута можливе визначення переміщення завального щита 14 (фігура 3а). За допомогою реєстрації кутів і відповідно до фігури 3б можливе визначення зміни кутів в області підтримуючого перекриття 13, при цьому зміни зазначених кутів протягом декількох циклів крокового переміщення вказують на те, чи переміщається секція 10 щитового механізованого кріплення під ухил або у гору. Зазначений на фігурі 3в кут показує положення опорного полоза 11 на ґрунті пласту. З вищевказаних вимог видно, що діапазон вимірювань використовуваних датчиків 17 ухилу повинен становити щонайменше від 120 до 180 градусів, при цьому є доцільними, насамперед, датчики 17 ухилу з діапазоном вимірювань від 0 до 360 градусів. Як ще раз зображено на фігурі 4, доцільним є оснащення відповідними датчиками ухилу також і конвеєра 20, до якого прикріплені відповідні окремі секції 10 щитового механізованого кріплення забійного встаткування, а також наявної на конвеєрі 20 очисної машини 22 у вигляді очисного комбайна 19 з барабанним виконавчим органом з верхнім барабаном 23 і нижнім барабаном 24, що дозволить з урахуванням цих значень ухилу співвіднести встановлену висоту врізання барабанів очисного комбайна 22 з барабанним виконавчим органом із забезпечуваним секціями 10 щитового механізованого кріплення призабійним простором 30. На представленому на фігурі 4 прикладі здійснення видно, що через переміщення у гору конвеєра 20 з очисним комбайном 22 з барабанним виконавчим органом з'являється небезпека зіткнення в області переднього краю підтримуючого перекриття 13. Як видно на фігурі 5, значення h1, h2, h3 висоти також можуть надати відомості про виникаюче зближення, неминучому при підземних роботах через навантаження покрівлі 31 на підтримуюче перекриття 13 секції 10 щитового механізованого 96528 14 кріплення, що знаходиться на ґрунті 32 пласту, як це позначено стрілкою 34 навантаження. Між покрівлею 31 і фунтом пласту 32 на фігурі 5 також схематично зображений вугільний бік 33. Як видно на фігурах 6 і 7, за рахунок спостереження за геометрією відповідної секції 10 щитового механізованого кріплення у комбінації зі зближенням, що з'явилося, можна зробити виводи про положення границі обвалення. При певному на підставі значень датчиків 17 ухилу положенні зображеної на фігурі 6 секції 10 щитового механізованого кріплення границя 35 обвалення перебуває у задній області підтримуючого перекриття 13, що означає, що припустиме навантаження секції щитового механізованого кріплення використовується оптимальним чином, тому що опорні сили кріплення починають впливати у тій області секції щитового механізованого кріплення, в якій можливий найбільший ефект із погляду керування покрівлею. Можливо, що утвориться на поверхні підтримуючого перекриття 13 породна подушка може бути зчищена при кроковому переміщенні секції 10 щитового механізованого кріплення. Опорний полоз розташований з невеликим підйомом і тому може бути легко переміщений ковзним рухом на навал відбитої копалини, що, можливо, утворився на ґрунті 32 пласту. Результат такого положення секції 10 щитового механізованого кріплення полягає у тому, що при переміщенні кріплення вперед навряд чи можна чекати обвалення покрівлі, так що за певних умов можлива автоматична й безаварійна робота забійного встаткування. На відміну від цього, по положеннях підтримуючого перекриття 13 і завального щита 14 зображеної на фігурі 7 секції 10 щитового механізованого кріплення видно, що границя 35 обвалення розташована занадто далеко вперед щодо підтримуючого перекриття 13, приблизно в області шарнірного з'єднання стійок 12. У зв'язку з цим, завальний кінець підтримуючого перекриття 13 через відсутність контропори давить нагору у покрівлю 31, через що передній кінець підтримуючого перекриття 13 спрямований донизу. Якщо таке положення підтримуючого перекриття 13 реєструється за допомогою даних від датчиків 17 ухилу, можливе вживання попереджувальних заходів по керуванню щитовим кріпленням, щоб уникнути пов'язаних із цим недоліків. Як не представлено більше докладно, однак за допомогою даних вимірювання ухилу, отриманих на окремих секціях 10 щитового механізованого кріплення, а також конвеєрі 20 і очисній машині 22, також можливо визначати поводження забійного встаткування у цілому за всією довжиною забою. Якщо, наприклад, в окремих зонах забою через геологічні аномалії, таких як області сідловин або западин, з'являються відхилення у роботі з очищення й виїмки щодо інших зон забою, то відповідні проблемні зони відразу стають видимими у системі контролю, що дозволяє цілеспрямованим чином коректувати роботи з очищення й виїмки у цих зонах. Розкриті у вищевикладеному описі, формулі винаходу, резюме й кресленні ознаки предмета 15 даної документації, як окремо, так і у будь-яких комбінаціях один з одним можуть мати істотне 96528 16 значення для здійснення винаходу в його різних конструктивних формах здійснення. 17 96528 18 19 Комп’ютерна верстка Л. Литвиненко 96528 Підписне 20 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling longwall mining operations
Автори англійськоюJunker, Martin, Mozar, Armin
Назва патенту російськоюСпособ управления работами очистного забоя
Автори російськоюЮнкер Мартин, Моцар Армин
МПК / Мітки
МПК: E21C 25/56, E21D 23/00
Мітки: очисного, забою, керування, спосіб, роботами
Код посилання
<a href="https://ua.patents.su/10-96528-sposib-keruvannya-robotami-ochisnogo-zaboyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування роботами очисного забою</a>
Спосіб керування покрівлею очисного забою
Номер патенту: 41585
Опубліковано: 17.09.2001
Автори: Хохотва Олександр Іванович, Лаптєв Анатолій Григорович, Скрипніков Володимир Іванович, Чернишов Віктор Григорович, Хамуляк Віктор Григорович, Тулуб Сергій Борисович, Яценко Олег Володимирович, Немчин Олександр Федорович, Шевцов Віктор Олексійович, Клявлін Валерій Володимирович, Малєв Валерій Іванович
МПК: E21D 23/00, E21D 17/00, E21C 41/18
Мітки: керування, очисного, спосіб, покрівлею, забою
Формула / Реферат:
1. Спосіб керування покрівлею очисного вибою, який включає підтримання покрівлі в привибійному просторі механізованим секційним кріпленням, розвантаження секції кріплення, пересування її, розпирання секцій механізованого кріплення, обвалення покрівлі після вибирання смуги вугілля, який відрізняється тим, що для верхняка секції механізованого кріплення, за рахунок різниці висот гідравлічних стійок, створюють керований кут нахилу для формування...
Спосіб керування покрівлею очисного вибою
Номер патенту: 41585
Опубліковано: 15.12.2004
Автори: Чернишов Віктор Григорович, Лаптєв Анатолій Григорович, Клявлін Валерій Володимирович, Хохотва Олександр Іванович, Хамуляк Віктор Григорович, Тулуб Сергій Борисович, Скрипніков Володимир Іванович, Немчин Олександр Федорович, Яценко Олег Володимирович, Малєв Валерій Іванович, Шевцов Віктор Олексійович
МПК: E21D 23/00, E21D 17/00, E21C 41/18
Мітки: очисного, вибою, покрівлею, спосіб, керування
Формула / Реферат:
1. Спосіб керування покрівлею очисного вибою, який включає підтримання покрівлі в привибійному просторі механізованим секційним кріпленням, розвантаження секції кріплення, пересування її, розпирання секцій механізованого кріплення, обвалення покрівлі після вибирання смуги вугілля, який відрізняється тим, що для верхняка секції механізованого кріплення, за рахунок різниці висот гідравлічних стійок, створюють керований кут нахилу для формування...
Спосіб монтажу механізованого очисного комплексу

Номер патенту: 49608
Опубліковано: 11.05.2010
Автори: Прихорчук Олександр Іванович, Чорней Петро Степанович
МПК: E21D 23/00
Мітки: комплексу, механізованого, монтажу, спосіб, очисного
Формула / Реферат:
Спосіб монтажу механізованого очисного комплексу, який включає попереднє проведення і кріплення монтажної камери перетином, меншим за необхідний, для розміщення механізованого очисного комплексу, здійснення наступного її розширення зі сторони забою лави з демонтажем частини кріплення попередньо проведеної монтажної камери, одночасний з проведенням розширення зі сторони забою лави монтаж секцій механізованого кріплення і лавового конвеєра,...
Спосіб підтримання сполучення очисного забою та підготовчої виробки при розробці пластових корисних копалин
Номер патенту: 68484
Опубліковано: 16.08.2004
Автори: Коломієць Олександр Миколайович, Перепелиця Валентин Григорович, Булат Анатолій Федорович
МПК: E21F 15/00
Мітки: пластових, підтримання, корисних, підготовчої, сполучення, забою, очисного, виробки, розробці, копалин, спосіб
Формула / Реферат:
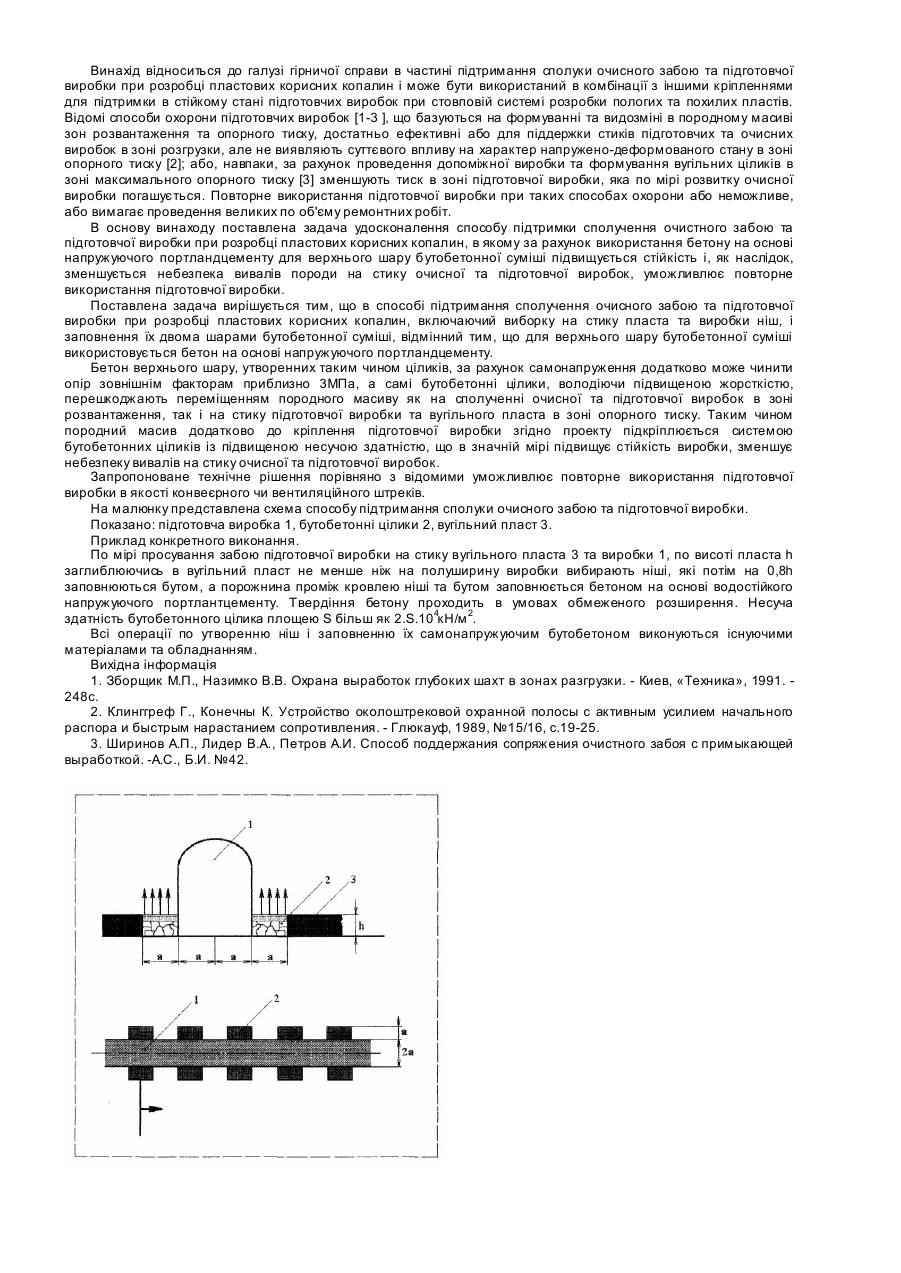
Спосіб підтримання сполучення очисного забою та підготовчої виробки при розробці пластових корисних копалин, що включає вибірку на стику пласта та виробки ніш і заповнення їх двома шарами бутобетонної суміші, який відрізняється тим, що для верхнього шару бутобетонної суміші використовується бетон на основі водостійкого напружуючого портландцементу.
Допоміжна секція кріплення очисного агрегату
Номер патенту: 38658
Опубліковано: 12.01.2009
Автори: Андрєєв Георгій Володимирович, Косарев Василь Васильович, Довженко Володимир Іванович, Косарев Іван Васильович
МПК: E21D 23/00
Мітки: кріплення, допоміжна, очисного, агрегату, секція
Формула / Реферат:
1. Допоміжна секція кріплення очисного агрегату, що містить основу й перекриття, зв'язані між собою завальним і забійним гідростояками, при цьому гідростояки шарнірно зв'язані з основою й перекриттям, основа виконана з завальною і забійною опорами, циліндри гідростояків розміщені усередині опор, причому циліндр завального гідростояка зв'язаний із завальною опорою через пружні елементи, а осі гідростояків лежать у вертикальній площині симетрії...
Попередній патент: Спосіб автоматичного створення заданого призабійного простору при очисних забійних роботах у підземній розробці кам’яного вугілля
Наступний патент: Спосіб автоматичного створення заданого призабійного простору при струговому очищенні у підземній розробці кам’яного вугілля
Випадковий патент: Трансформатор струму