Швидкодіючий рейтрейсинговий просторово роздільний рефрактометр
Номер патенту: 104397
Опубліковано: 27.01.2014
Автори: Бурак Анатолій Васильович, Мазурін Ігор Володимирович, Сергієнко Микола Маркович, Гордієнко Валентин Іванович, Молебний Василь Васильович, Молебний Сергій Васильович

Формула / Реферат
1. Швидкодіючий рейтрейсинговий просторово роздільний рефрактометр, що має в своєму складі канал позиціонування і акомодації, канал зондування, приймальний канал та канал управління і обробки інформації, причому канал позиціонування і акомодації складається з світлоподільника, об'єктива, відеокамери, ближньої марки, лінзи, рухомої уздовж оптичної осі, віддаленої марки та джерел світла для освітлення ближньої марки, віддаленої марки та ока, канал зондування складається з послідовно встановлених лазера, блока сканування та колімуючої лінзи, причому блок сканування складається з послідовно встановлених х-дефлектора, електрично зв'язаного з драйвером х-дефлектора, та y-дефлектора, електрично зв'язаного з драйвером у-дефлектора, причому колімуюча лінза має точку переднього фокуса, що збігається з еквівалентним центром сканування блока сканування, приймальний канал складається з послідовно встановлених поляризаційного фільтра, апертурної діафрагми, об'єктива і позиційно-чутливого детектора, канал управління і обробки інформації складається з блока управління, блока обробки інформації і дисплея, причому блок управління електричним зв'язком сполучено з блоком обробки інформації і дисплеєм, вихід блока обробки інформації сполучено з дисплеєм, канал управління і обробки інформації сполучено з каналом зондування, каналом позиціонування і акомодації та приймальним каналом, канал позиціонування і акомодації, канал зондування і приймальний канал оптично пов'язані через світлоподільники, який відрізняється тим, що в канал зондування після колімуючої лінзи введено електрично керовану рідинну лінзу, між оком пацієнта та електрично керованою рідинною лінзою встановлено проекційну позитивну лінзу, розташовану на відстані від рідинної лінзи, що дорівнює двом фокусним відстаням проекційної позитивної лінзи, причому око пацієнта позиціоновано на відстань, що дорівнює двом фокусним відстаням проекційної позитивної лінзи, електрично керована рідинна лінза сполучена електричним зв'язком з каналом управління та обробки інформації, якому надано функцію обчислення кута нахилу зондуючого лазерного променя.
2. Швидкодіючий рейтрейсинговий просторово роздільний рефрактометр за п. 1, який відрізняється тим, що світлоподільник каналу зондування та приймального каналу розміщено між колімуючою лінзою та електрично керованою рідинною лінзою.
3. Швидкодіючий рейтрейсинговий просторово роздільний рефрактометр за п. 1, який відрізняється тим, що світлоподільник каналу зондування та приймального каналу розміщено між електрично керованою рідинною лінзою та проекційною позитивною лінзою, до складу приймального каналу введено другу електрично керовану рідинну лінзу так, щоб оптичний шлях між нею та проекційною позитивною лінзою складав подвоєну фокусну відстань проекційної позитивної лінзи, а обидві електрично керовані рідинні лінзи сполучені між собою електричним зв'язком.
Текст
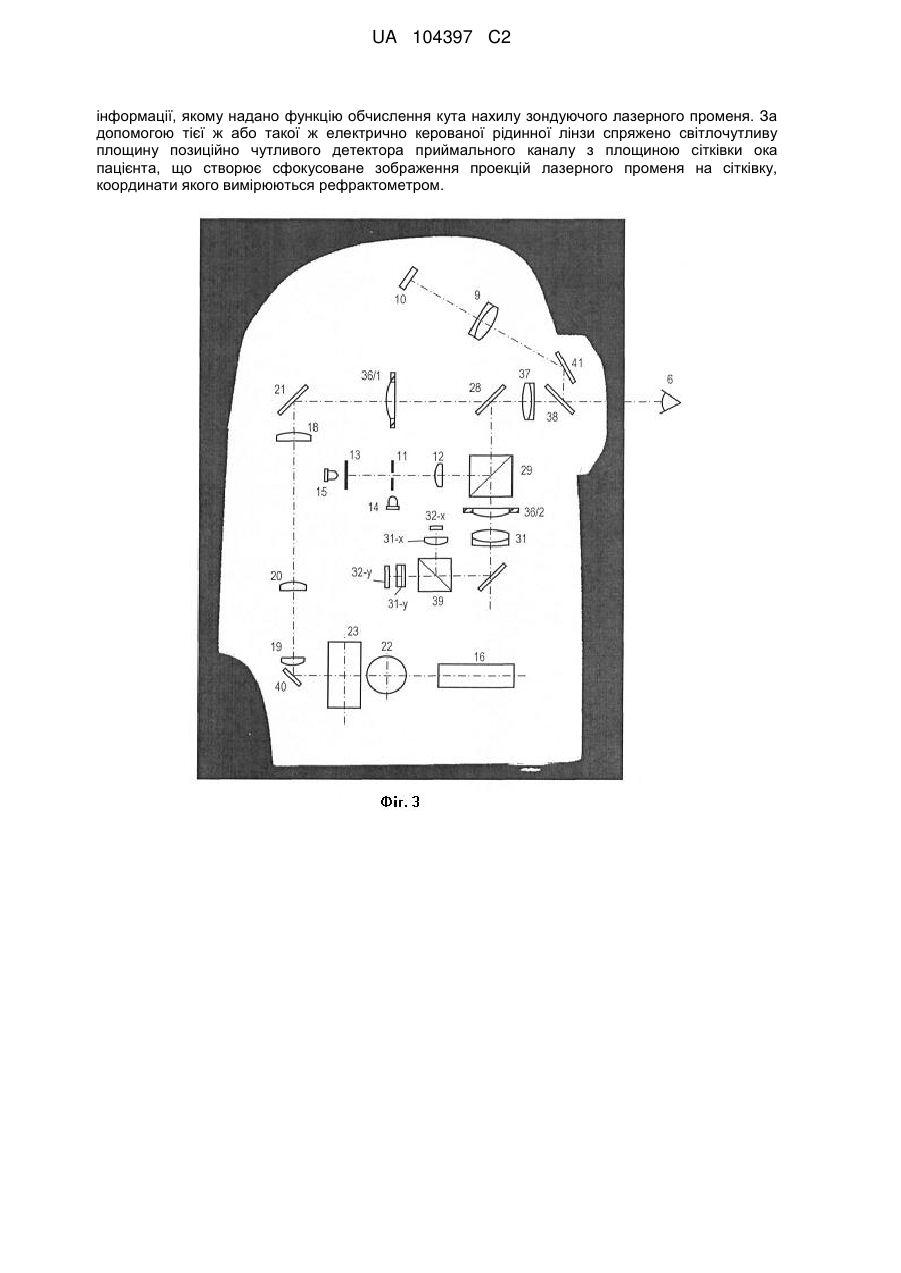
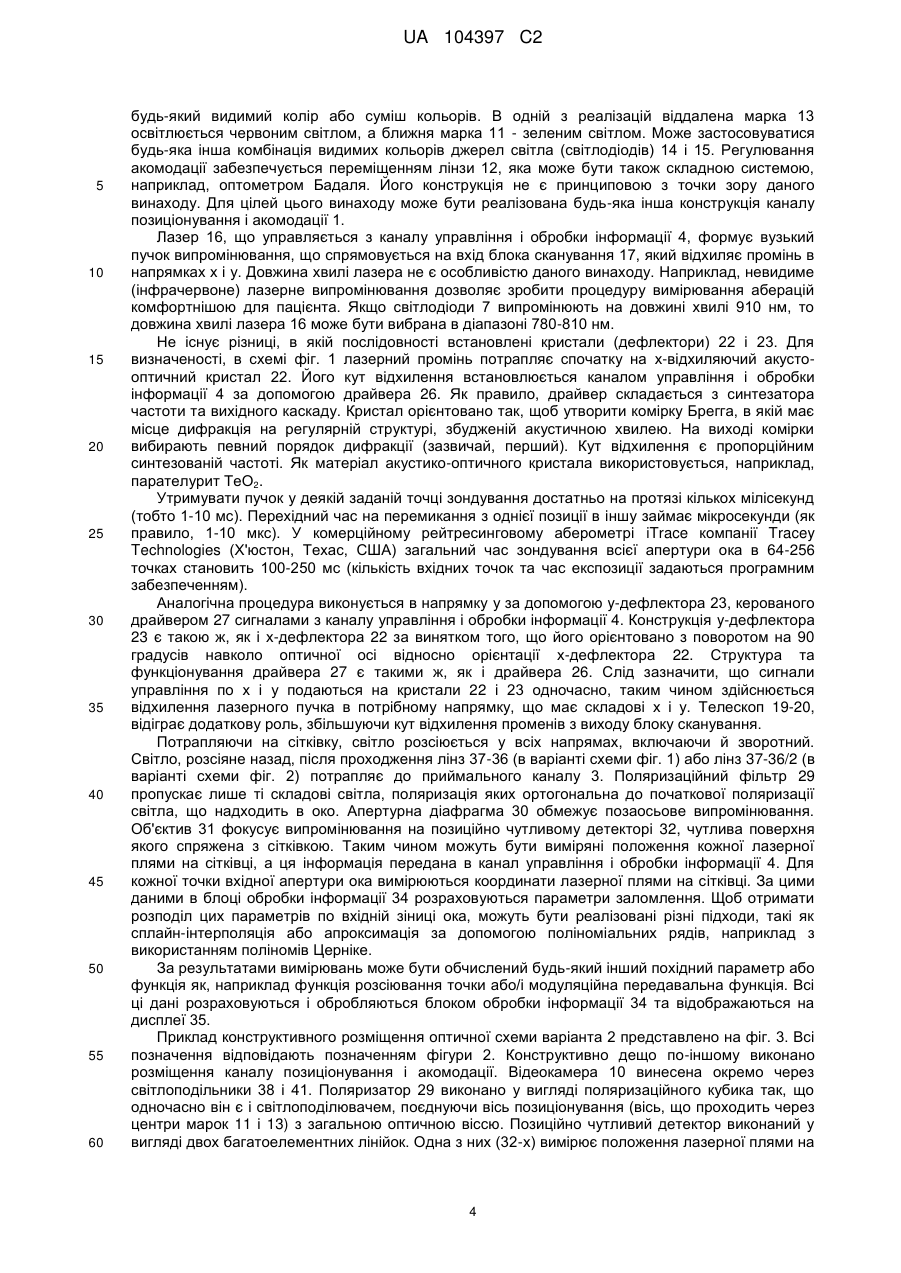
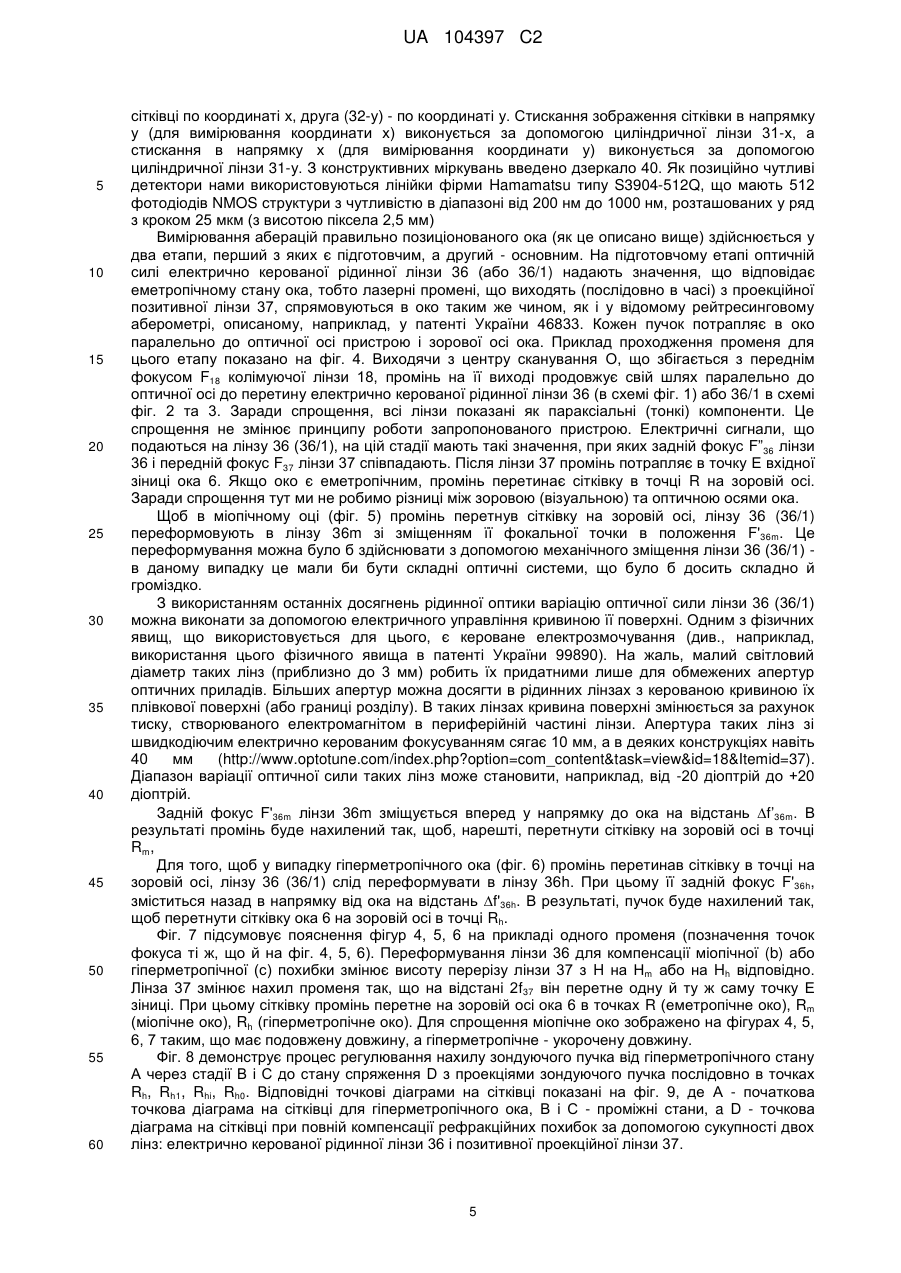
Реферат: Винахід належить до галузі медичного приладобудування, зокрема до офтальмологічних пристроїв, що використовуються при дослідженні ока, наприклад для офтальмологічного обстеження та вимірювання рефракції та рефракційних похибок оптичної системи ока людини, з метою як хірургічної, так і нехірургічної корекції зору. Запропоновано швидкодіючий рейтрейсинговий просторово роздільний рефрактометр, який використовує принцип рейтрейсингу, з внесенням поправок на нахил лазерного променя при зондуванні ока так, щоб в оці лазерний промінь перетнув зорову вісь в площині сітківки. Рефрактометр має канал позиціонування і акомодації, канал зондування, приймальний канал, канал управління і обробки інформації та послідовно встановлені після колімуючої лінзи електрично керовану рідинну лінзу та проекційну позитивну лінзу, розташовану на відстані від рідинної лінзи, що дорівнює двом фокусним відстаням проекційної позитивної лінзи, причому око пацієнта позиціоновано на відстань, що дорівнює двом фокусним відстаням проекційної позитивної лінзи, електрично керована рідинна лінза сполучена електричним зв'язком з каналом управління та обробки UA 104397 C2 (12) UA 104397 C2 інформації, якому надано функцію обчислення кута нахилу зондуючого лазерного променя. За допомогою тієї ж або такої ж електрично керованої рідинної лінзи спряжено світлочутливу площину позиційно чутливого детектора приймального каналу з площиною сітківки ока пацієнта, що створює сфокусоване зображення проекцій лазерного променя на сітківку, координати якого вимірюються рефрактометром. UA 104397 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі медичного приладобудування, зокрема до офтальмологічних пристроїв, що використовуються при дослідженні ока, наприклад для офтальмологічного обстеження та вимірювання рефракції та рефракційних похибок оптичної системи ока людини з метою як хірургічної, так і нехірургічної корекції зору. Об'єктивні методи вимірювання рефракції та рефракційних похибок ока використовують око як частину вимірювального пристрою, створюючи тим самим джерело похибок рефракції, яку вони мають вимірювати. З точки зору коректності вимірювань рефракції та рефракційних похибок ока просторово роздільний рефрактометр враховує це джерело похибок. Вже в першому, ще суб'єктивному, макеті просторово роздільного рефрактометра (R.Н. Webb, et al. Measurement of ocular local wavefront distortion with a spatially resolved refractometer. Applied Optics, 1992, Vol. 31, pp. 3678-3686) ця умова витримувалась шляхом суміщення положення точки входження променя в око самим пацієнтом. Пізніше (R.H. Webb, et al. SRR (spatially resolved refractometer): a null-seeking aberrometer. Applied Optics, 2003, Vol. 42, pp. 736-744) був розроблений просторово роздільний рефрактометр, в якому пошук компенсації похибок, що вносяться оптичною системою самого об'єкта вимірювання - ока, було автоматизовано введенням квадрантного детектора як сенсора нульового значення рефракційної похибки, і таким чином, була зроблена спроба зробити вимірювання об'єктивними, незалежними від пацієнта. Та недолік малої швидкодії залишався (використовуються електромеханічні сканери), що було перешкодою для широкого клінічного застосування такого технічного рішення. В патентній заявці США 2010/0271595 (опублікована 28.10.2010) запропоновано використання послідовно встановлених блоків двовісного сканування на базі акустико-оптичних дефлекторів, що мають високу швидкодію. Завдяки цьому була знята перешкода для клінічного застосування просторово роздільної рефрактометрії. Та введення двох комплектів акустикооптичних дефлекторів здорожує пристрій, що можна вважати недоліком, над яким потрібно працювати. Нами пропонується швидкодіючий рейтрейсинговий просторово роздільний рефрактометр, що має канал позиціонування і акомодації, канал зондування, приймальний канал та канал управління і обробки інформації. Канал позиціонування і акомодації складається із об'єктива, відеокамери, ближньої марки, лінзи, рухомої уздовж оптичної осі, віддаленої марки та джерел світла для освітлення ближньої марки, віддаленої марки та ока. Канал зондування складається з послідовно встановлених лазера, блока сканування та колімуючої лінзи, причому блок сканування складається з послідовно встановлених хдефлектора, електрично зв'язаного з драйвером х-дефлектора, та у-дефлектора, електрично зв'язаного з драйвером у-дефлектора, причому колімуюча лінза має точку переднього фокуса, що збігається з еквівалентним центром сканування блока сканування. Приймальний канал складається з послідовно встановлених поляризаційного фільтра, апертурної діафрагми, об'єктива і позиційно-чутливого детектора. Канал управління і обробки інформації складається з блока управління, блока обробки інформації і дисплея, причому блок управління електрично сполучений з блоком обробки інформації і дисплеєм, вихід блока обробки інформації електрично сполучений з дисплеєм, канал управління і обробки інформації електрично сполучено з каналом зондування, каналом позиціонування і акомодації та приймальним каналом, канал позиціонування і акомодації, канал зондування і приймальний канал мають спільну оптичну вісь та оптично пов'язані через світлоподільники. Відмінністю запропонованого винаходу є те, що в канал зондування після колімуючої лінзи введено електрично керовану рідинну лінзу, між оком пацієнта та електрично керованою рідинною лінзою встановлено проекційну позитивну лінзу, розташовану на відстані від рідинної лінзи, що дорівнює двом фокусним відстаням проекційної позитивної лінзи, причому око пацієнта позиціоновано на відстань, що дорівнює двом фокусним відстаням проекційної позитивної лінзи, електрично керована рідинна лінза сполучена електричним зв'язком з каналом управління та обробки інформації, якому надано функцію обчислення кута нахилу зондуючого лазерного променя. Для створення умови спряження світлочутливої площини позиційно чутливого детектора та площини сітківки світлоподільник каналу зондування та приймального каналу (що відгалужує в приймальний канал відбите сітківкою випромінювання) розміщено між колімуючою лінзою та електрично керованою рідинною лінзою. Як варіант конструкції рефрактометра, світлоподільник каналу зондування та приймального каналу розміщено між електрично керованою рідинною лінзою та проекційною позитивною лінзою, до складу приймального каналу введено другу електрично керовану рідинну лінзу так, 1 UA 104397 C2 5 10 15 20 25 30 35 40 45 50 55 щоб оптичний шлях між нею та проекційною позитивною лінзою складав подвоєну фокусну відстань проекційної позитивної лінзи, а обидві електрично керовані рідинні лінзи сполучені між собою електричним зв'язком. Фіг. 1 зображує схему швидкодіючого рейтрейсингового просторово роздільного рефрактометра, ілюструючи варіант здійснення винаходу, що має канал позиціонування і акомодації 1, канал зондування 2, приймальний канал 3, канал управління і обробки інформації 4, електрично керовану рідинну лінзу 36 та проекційну позитивну лінзу 37, що встановлені на частині оптичного шляху, спільного для каналу зондування 2 та для приймального каналу 3. Фіг. 2 зображує інший варіант схеми швидкодіючого рейтрейсингового просторово роздільного рефрактометра з каналами 1, 2, 3, 4 такими ж, що й на фіг. 1 з тією відмінністю, що лише проекційна позитивна лінза 37 встановлена на частині оптичного шляху, спільного для каналу зондування 2 та для приймального каналу 3, а в приймальний канал введена ще одна електрично керована рідинна лінза 36/2, точно така, як і лінза 36, позначена на фіг. 2 як лінза 36/1. На фіг. 3 наведено приклад компонування елементів оптичної схеми швидкодіючого рейтрейсингового просторово роздільного рефрактометра за варіантом розміщення електрично керованих рідинних лінз, зображеним на фіг. 2. На фіг. 4 показано приклад проходження променів в оптичній системі рефрактометра у випадку зондування еметропічного ока. Промінь проходить колімуючу лінзу 18, електрично керовану рідинну лінзу 36, проекційну позитивну лінзу 37, потрапляє в око через точку Е паралельно до оптичної осі рефрактометра й перетинає сітківку у точці R на зоровій осі. На фіг. 5 представлено приклад проходження променів у оптичній системі рефрактометра у випадку, коли виконується компенсація рефракційних похибок типу міопії. Промінь проходить колімуючу лінзу 18, електрично керовану рідинну лінзу 36 і проекційну позитивну лінзу 37. Оптична сила лінзи 36 встановлюється такою, щоб нахилений промінь, перетнувши задану точку зіниці Е, зустрів сітківку в тій же точці R на зоровій осі. На фіг. 6 представлено приклад проходження променів в оптичній системі рефрактометра, коли потрібно компенсувати рефракційні похибки типу гіперметропії. Промінь перетинає колімуючу лінзу 18, електрично керовану рідинну лінзу 36 і проекційну позитивну лінзу 37. Оптична сила лінзи 36 встановлюється такою, щоб нахилений промінь, перетнувши задану точку зіниці Е, зустрів сітківку в тій же точці R на зоровій осі. Фіг. 7 підсумовує пояснення фігур 4, 5, 6, демонструючи проходження променів для трьох випадків: коли немає рефракційних похибок (промінь а), коли компенсуються похибки типу міопії (промінь b) та коли компенсуються похибки типу гіперметромії (промінь с). Фіг. 8 демонструє процес регулювання нахилу зондуючого променя від початку вимірювання на прикладі похибки гіперметропічного типу (стадія А) до повної компенсації цієї похибки в стані D (через стадії В і С). На фіг. 9 показані точкові діаграми на сітківці для різних стадій процесу регулювання нахилу зондуючого променя - від початку вимірювання до повної компенсації рефракційної похибки. Стадії A, В, С і D на цій фігурі відповідають стадіям на фіг. 8. На фіг. 10 показано проходження світлового променя у зворотному напрямку ока пацієнта для трьох випадків: коли немає рефракційних похибок (промінь а), коли компенсуються похибки типу міопії (промінь b) та коли компенсуються похибки типу гіперметромії (промінь с). Варіанти швидкодіючого рейтрейсингового просторово роздільного рефрактометра у відповідності з цим винаходом докладно описано нижче з посиланням на фігури креслення. Один з варіантів здійснення винаходу показано на фіг. 1. В цьому варіанті до складу рефрактометра входять: канал позиціонування і акомодації 1, канал зондування 2, приймальний канал 3, канал управління і обробки інформації 4, електрично керована рідинна лінза 36 та проекційна позитивна лінза 37. Око 6 є об'єктом дослідження. Канал позиціонування і акомодації 1 складається з кількох джерел світла 7, встановлених перед оком 6, світлоподільника 8, об'єктива 9, відеокамери 10. Крім того, канал позиціонування і акомодації 1 містить в собі ближню марку 11, об'єктив 12 та віддалену марку (мішень) 13. Об'єктив 12 може переміщатися уздовж оптичної осі. Ближня марка 11 освітлюється джерелом світла 14, а віддалена марка - джерелом світла 15. Джерелами світла 7, 14 і 15 можуть бути, наприклад, світловипромінюючі діоди. Через світлоподільник 38 око 6 візуально пов'язано з каналом 1. При цьому відеокамера 10 через світлоподільник 8 є спряженої з зіницею ока і використовується для первинної установки рефрактометра перед оком пацієнта, допомагаючи зцентрувати відбиття світла світлодіодів 7 від рогівки ока 6. Точну орієнтацію ока здійснює пацієнт суміщаючи центри ближньої марки 11 та віддаленої марки 13. 2 UA 104397 C2 5 10 15 20 25 30 35 40 45 50 55 60 Канал зондування 2 складається з лазера 16, блока сканування 17 та колімуючої лінзи 18. З конструктивних міркувань, що не мають принципового значення для здійснення винаходу, між блоком сканування 17 та колімуючою лінзою 18 встановлено телескоп масштабування, що складається з двох лінз 19 і 20, а після колімуючої лінзи 18 встановлено відбиваюче дзеркало 21. За допомогою телескопа 19-20 можна збільшити апертуру сканування для узгодження її з апертурою ока. Блок сканування 17 складається з акусто-оптичного кристала 22, що відхиляє промені в напрямку х, перпендикулярному до оптичної осі (х-дефлектор), та акусто-оптичного кристала 23, що відхиляє промені в напрямку у, перпендикулярному до осі х та до оптичної осі (у-дефлектор). Драйвер 26 х-дефлектора електрично з'єднаний з х-дефлектором 22, а драйвер 27 у-дефлектора електрично з'єднаний з у-дефлектором 23. Колімуюча лінза 18 встановлена так, що її передній фокус F18 збігається з центром сканування блока сканування, перенесеним в точку заднього фокуса F'20 лінзи 20. Для виконання умови телескопічності передній фокус лінзи 20 суміщено з заднім фокусом лінзи 19. Дзеркало 21 дозволяє змінити напрямок оптичної осі каналу зондування 2 для зручності конструкції. Перед оком пацієнта встановлено проекційну позитивну лінзу 37 на відстані від ока, що дорівнює двом фокусним відстаням лінзи 37. На такій же подвоєній фокусній відстані від лінзи 37 між нею і колімуючою лінзою 18 встановлено електрично керовану рідинну лінзу 36 (36 Var), електричним зв'язком сполучену з каналом управління і обробки інформації 4. Світлоподільник 28, що спрямовує випромінювання від ока на приймальний канал, встановлено в зворотному ході після електрично керованої рідинної лінзи 36. Приймальний канал 3 складається з послідовно встановлених компонентів: поляризаційного фільтра 29, апертурної діафрагми 30, об'єктива 31 та позиційно-чутливого детектора 32. Позиційно-чутливий детектор 32 може бути будь-якого відомого типу. Одне з можливих рішень двовимірна структура, наприклад, типу приладу з зарядовим зв'язком. При регулюванні лінзи 36 так, що вона компенсує аметропію ока, площини позиційно чутливого детектора 32 и сітківки ока 6 будуть спряженими. Це означає, що зворотний хід променів на виході лінзи 36 буде паралельним до оптичної осі, а зображення лазерної плями з очного дна буде сфокусованим в площині позиційно чутливого детектора 32 незалежно від рефракційної сили ока. Канал управління та обробки інформації 4 складається з блока управління 33, блока обробки інформації 34 та дисплея 35. В каналі 4 блок управління 33 електрично з'єднано з блоком обробки інформації 34 і дисплеєм 35. Крім того, вихід блока обробки інформації 34 електрично з'єднаний з дисплеєм 35. Канал управління та обробки інформації 4 має електричні з'єднання з лазером 16, драйверами 26 і 27 каналу зондування 2. Канал 4 має також двостороннє електричне з'єднання з каналом позиціонування і акомодації 1, приймальним каналом 3 та рідинною лінзою 36. Через лінію а канал 4 має електричний зв'язок з джерелами світла 7, які освітлюють око, а через лінію b - з джерелами світла 14 і 15, які освітлюють ближню та віддалену марки відповідно. Інший варіант здійснення винаходу подано на фіг. 2. Елементи цієї схеми мають однакові позначення з елементами схеми фіг. 1 і виконують такі ж самі функції. Особливістю цієї схеми є те, що в ній світлоподільник 28 встановлено між лінзами 37 і 36 (36/1 Var). Хід лазерних променів з виходу каналу зондування буде таким же, як і в попередньому варіанті фіг. 1. Але для фокусування випромінювання з ока на вході приймального каналу встановлено другу електрично керовану рідинну лінзу 36 (36/2 Var). Електричним зв'язком вона сполучена з лінзою 36 (36/1 Var), і обидві лінзи сполучені з каналом управління і обробки інформації 4. Завдяки цьому обидві лінзи завжди мають однакову оптичну силу, що має результатом спряження площин позиційно чутливого детектора 32 і сітківки ока 6 та формування на позиційно чутливому детекторі 32 сфокусованого зображення лазерної плями на сітківці. Перед початком вимірювання пристрій та око повинні бути правильно позиціоновані. Ця процедура, як правило, здійснюється непрямим шляхом під час фокусування зображення райдужної оболонки ока на відеокамері 10. Око освітлюється джерелом або декількома джерелами світла 7, наприклад, AlGaAs світлодіодами з максимумом випромінювання на довжині хвилі 910 нм. Важливо сумістити зорову (візуальну) вісь ока з оптичною віссю пристрою. Щоб однозначно досягти цього, центри ближньої марки 11 та віддаленої марки 13 повинні бути розташовані на оптичній осі пристрою. Через ближню марку 11 пацієнт має бачити віддалену марку 13 так, щоб в їх накладених зображеннях центри співпадали. Один з можливих варіантів виконання ближньої марки 11 - отвір на непрозорій пластині. Інший варіант ближньої марки 11 може бути реалізований як трубка, через яку можна спостерігати віддалену марку 13. У процесі позиціонування ближня марка 11 освітлюється видимим світлом джерела 14. Це може бути 3 UA 104397 C2 5 10 15 20 25 30 35 40 45 50 55 60 будь-який видимий колір або суміш кольорів. В одній з реалізацій віддалена марка 13 освітлюється червоним світлом, а ближня марка 11 - зеленим світлом. Може застосовуватися будь-яка інша комбінація видимих кольорів джерел світла (світлодіодів) 14 і 15. Регулювання акомодації забезпечується переміщенням лінзи 12, яка може бути також складною системою, наприклад, оптометром Бадаля. Його конструкція не є принциповою з точки зору даного винаходу. Для цілей цього винаходу може бути реалізована будь-яка інша конструкція каналу позиціонування і акомодації 1. Лазер 16, що управляється з каналу управління і обробки інформації 4, формує вузький пучок випромінювання, що спрямовується на вхід блока сканування 17, який відхиляє промінь в напрямках х і у. Довжина хвилі лазера не є особливістю даного винаходу. Наприклад, невидиме (інфрачервоне) лазерне випромінювання дозволяє зробити процедуру вимірювання аберацій комфортнішою для пацієнта. Якщо світлодіоди 7 випромінюють на довжині хвилі 910 нм, то довжина хвилі лазера 16 може бути вибрана в діапазоні 780-810 нм. Не існує різниці, в якій послідовності встановлені кристали (дефлектори) 22 і 23. Для визначеності, в схемі фіг. 1 лазерний промінь потрапляє спочатку на х-відхиляючий акустооптичний кристал 22. Його кут відхилення встановлюється каналом управління і обробки інформації 4 за допомогою драйвера 26. Як правило, драйвер складається з синтезатора частоти та вихідного каскаду. Кристал орієнтовано так, щоб утворити комірку Брегга, в якій має місце дифракція на регулярній структурі, збудженій акустичною хвилею. На виході комірки вибирають певний порядок дифракції (зазвичай, перший). Кут відхилення є пропорційним синтезованій частоті. Як матеріал акустико-оптичного кристала використовується, наприклад, парателурит ТеО2. Утримувати пучок у деякій заданій точці зондування достатньо на протязі кількох мілісекунд (тобто 1-10 мс). Перехідний час на перемикання з однієї позиції в іншу займає мікросекунди (як правило, 1-10 мкс). У комерційному рейтресинговому аберометрі iTrace компанії Tracey Technologies (Х'юстон, Техас, США) загальний час зондування всієї апертури ока в 64-256 точках становить 100-250 мс (кількість вхідних точок та час експозиції задаються програмним забезпеченням). Аналогічна процедура виконується в напрямку у за допомогою y-дефлектора 23, керованого драйвером 27 сигналами з каналу управління і обробки інформації 4. Конструкція y-дефлектора 23 є такою ж, як і х-дефлектора 22 за винятком того, що його орієнтовано з поворотом на 90 градусів навколо оптичної осі відносно орієнтації х-дефлектора 22. Структура та функціонування драйвера 27 є такими ж, як і драйвера 26. Слід зазначити, що сигнали управління по х і у подаються на кристали 22 і 23 одночасно, таким чином здійснюється відхилення лазерного пучка в потрібному напрямку, що має складові х і у. Телескоп 19-20, відіграє додаткову роль, збільшуючи кут відхилення променів з виходу блоку сканування. Потрапляючи на сітківку, світло розсіюється у всіх напрямах, включаючи й зворотний. Світло, розсіяне назад, після проходження лінз 37-36 (в варіанті схеми фіг. 1) або лінз 37-36/2 (в варіанті схеми фіг. 2) потрапляє до приймального каналу 3. Поляризаційний фільтр 29 пропускає лише ті складові світла, поляризація яких ортогональна до початкової поляризації світла, що надходить в око. Апертурна діафрагма 30 обмежує позаосьове випромінювання. Об'єктив 31 фокусує випромінювання на позиційно чутливому детекторі 32, чутлива поверхня якого спряжена з сітківкою. Таким чином можуть бути виміряні положення кожної лазерної плями на сітківці, а ця інформація передана в канал управління і обробки інформації 4. Для кожної точки вхідної апертури ока вимірюються координати лазерної плями на сітківці. За цими даними в блоці обробки інформації 34 розраховуються параметри заломлення. Щоб отримати розподіл цих параметрів по вхідній зіниці ока, можуть бути реалізовані різні підходи, такі як сплайн-інтерполяція або апроксимація за допомогою поліноміальних рядів, наприклад з використанням поліномів Церніке. За результатами вимірювань може бути обчислений будь-який інший похідний параметр або функція як, наприклад функція розсіювання точки або/і модуляційна передавальна функція. Всі ці дані розраховуються і обробляються блоком обробки інформації 34 та відображаються на дисплеї 35. Приклад конструктивного розміщення оптичної схеми варіанта 2 представлено на фіг. 3. Всі позначення відповідають позначенням фігури 2. Конструктивно дещо по-іншому виконано розміщення каналу позиціонування і акомодації. Відеокамера 10 винесена окремо через світлоподільники 38 і 41. Поляризатор 29 виконано у вигляді поляризаційного кубика так, що одночасно він є і світлоподілювачем, поєднуючи вісь позиціонування (вісь, що проходить через центри марок 11 і 13) з загальною оптичною віссю. Позиційно чутливий детектор виконаний у вигляді двох багатоелементних лінійок. Одна з них (32-х) вимірює положення лазерної плями на 4 UA 104397 C2 5 10 15 20 25 30 35 40 45 50 55 60 сітківці по координаті х, друга (32-у) - по координаті у. Стискання зображення сітківки в напрямку у (для вимірювання координати х) виконується за допомогою циліндричної лінзи 31-х, а стискання в напрямку х (для вимірювання координати у) виконується за допомогою циліндричної лінзи 31-у. З конструктивних міркувань введено дзеркало 40. Як позиційно чутливі детектори нами використовуються лінійки фірми Hamamatsu типу S3904-512Q, що мають 512 фотодіодів NMOS структури з чутливістю в діапазоні від 200 нм до 1000 нм, розташованих у ряд з кроком 25 мкм (з висотою піксела 2,5 мм) Вимірювання аберацій правильно позиціонованого ока (як це описано вище) здійснюється у два етапи, перший з яких є підготовчим, а другий - основним. На підготовчому етапі оптичній силі електрично керованої рідинної лінзи 36 (або 36/1) надають значення, що відповідає еметропічному стану ока, тобто лазерні промені, що виходять (послідовно в часі) з проекційної позитивної лінзи 37, спрямовуються в око таким же чином, як і у відомому рейтресинговому аберометрі, описаному, наприклад, у патенті України 46833. Кожен пучок потрапляє в око паралельно до оптичної осі пристрою і зорової осі ока. Приклад проходження променя для цього етапу показано на фіг. 4. Виходячи з центру сканування О, що збігається з переднім фокусом F18 колімуючої лінзи 18, промінь на її виході продовжує свій шлях паралельно до оптичної осі до перетину електрично керованої рідинної лінзи 36 (в схемі фіг. 1) або 36/1 в схемі фіг. 2 та 3. Заради спрощення, всі лінзи показані як параксіальні (тонкі) компоненти. Це спрощення не змінює принципу роботи запропонованого пристрою. Електричні сигнали, що подаються на лінзу 36 (36/1), на цій стадії мають такі значення, при яких задній фокус F”36 лінзи 36 і передній фокус F37 лінзи 37 співпадають. Після лінзи 37 промінь потрапляє в точку Е вхідної зіниці ока 6. Якщо око є еметропічним, промінь перетинає сітківку в точці R на зоровій осі. Заради спрощення тут ми не робимо різниці між зоровою (візуальною) та оптичною осями ока. Щоб в міопічному оці (фіг. 5) промінь перетнув сітківку на зоровій осі, лінзу 36 (36/1) переформовують в лінзу 36m зі зміщенням її фокальної точки в положення F'36m. Це переформування можна було б здійснювати з допомогою механічного зміщення лінзи 36 (36/1) в даному випадку це мали би бути складні оптичні системи, що було б досить складно й громіздко. З використанням останніх досягнень рідинної оптики варіацію оптичної сили лінзи 36 (36/1) можна виконати за допомогою електричного управління кривиною її поверхні. Одним з фізичних явищ, що використовується для цього, є кероване електрозмочування (див., наприклад, використання цього фізичного явища в патенті України 99890). На жаль, малий світловий діаметр таких лінз (приблизно до 3 мм) робить їх придатними лише для обмежених апертур оптичних приладів. Більших апертур можна досягти в рідинних лінзах з керованою кривиною їх плівкової поверхні (або границі розділу). В таких лінзах кривина поверхні змінюється за рахунок тиску, створюваного електромагнітом в периферійній частині лінзи. Апертура таких лінз зі швидкодіючим електрично керованим фокусуванням сягає 10 мм, а в деяких конструкціях навіть 40 мм (http://www.optotune.com/index.php?option=com_content&task=view&id=18&Itemid=37). Діапазон варіації оптичної сили таких лінз може становити, наприклад, від -20 діоптрій до +20 діоптрій. Задній фокус F'36m лінзи 36m зміщується вперед у напрямку до ока на відстань f’36m. В результаті промінь буде нахилений так, щоб, нарешті, перетнути сітківку на зоровій осі в точці R m, Для того, щоб у випадку гіперметропічного ока (фіг. 6) промінь перетинав сітківку в точці на зоровій осі, лінзу 36 (36/1) слід переформувати в лінзу 36h. При цьому її задній фокус F'36h, зміститься назад в напрямку від ока на відстань f'36h. В результаті, пучок буде нахилений так, щоб перетнути сітківку ока 6 на зоровій осі в точці Rh. Фіг. 7 підсумовує пояснення фігур 4, 5, 6 на прикладі одного променя (позначення точок фокуса ті ж, що й на фіг. 4, 5, 6). Переформування лінзи 36 для компенсації міопічної (b) або гіперметропічної (с) похибки змінює висоту перерізу лінзи 37 з H на Нm або на Hh відповідно. Лінза 37 змінює нахил променя так, що на відстані 2f37 він перетне одну й ту ж саму точку Е зіниці. При цьому сітківку промінь перетне на зоровій осі ока 6 в точках R (еметропічне око), Rm (міопічне око), Rh (гіперметропічне око). Для спрощення міопічне око зображено на фігурах 4, 5, 6, 7 таким, що має подовжену довжину, а гіперметропічне - укорочену довжину. Фіг. 8 демонструє процес регулювання нахилу зондуючого пучка від гіперметропічного стану А через стадії В і С до стану спряження D з проекціями зондуючого пучка послідовно в точках Rh, Rh1, Rhi, Rh0. Відповідні точкові діаграми на сітківці показані на фіг. 9, де А - початкова точкова діаграма на сітківці для гіперметропічного ока, В і С - проміжні стани, a D - точкова діаграма на сітківці при повній компенсації рефракційних похибок за допомогою сукупності двох лінз: електрично керованої рідинної лінзи 36 і позитивної проекційної лінзи 37. 5 UA 104397 C2 5 10 15 20 25 30 Чим менші розміри точкової діаграми на сітківці, тим менші похибки будуть вноситись оптичною системою ока на зворотному шляху від сітківки до позиційно чутливого детектора як складової частини аберометра. Фіг. 10 ілюструє спряження світлочутливої площини позиційно чутливого детектора 32 та площини сітківки ока 6. Промінь а відповідає еметропічному стану, промінь b відповідає міопічному типу похибок, а промінь с - гіперметропічному. Позначення елементів схеми на цій фігурі відповідає позначенням на попередніх фігурах. Спряження цих площин дозволяє отримати на позиційно чутливому детекторі 32 чітке сфокусоване зображення лазерної плями на сітківці, що звичайно є одним з важливих факторів отримання високої точності вимірювання. Вимірювання рефракції ока та її неоднорідностей за допомогою пристрою, що пропонується, можна здійснити за кількома алгоритмами. Один з алгоритмів може буде таким. Спочатку вимірюють рефракцію при паралельному входженні променів у око, блок обробки інформації 34 обчислює абераційні похибки для кожної точки Ei в апертурі ока 6 та визначає параметри сигналів, які мають бути прикладені до електрично керованої рідинної лінзи 36, щоб довести лазерний пучок в кожну точку Еi нахиленим для компенсації виміряної похибки. Потім ці розраховані сигнали прикладаються до рідинної лінзи 36 послідовно для всіх точок зондування та вимірюються нові значення похибок хвильового фронту в тих же точках Еi. Щоб отримати нульову похибку в кожній точці Ei, може знадобитися декілька ітерацій вимірювань. Недоліком цього підходу є тривалість процедури: при перемиканні рідинної лінзи 36 з одного значення корекції похибок в інше тривалістю 10 мс потрібно буде 0,63…2,55 секунди для перемикання всіх 64…256 положень. Загальний час вимірювань буде ще більшим, адже вимірювання в кожній точці потребують ще деякого часу на утримання пучка в заданому положенні (від 1 мс до 10 мс для кожної точки). Для зменшення часу на перемикання рідинної лінзи 36 потрібно зменшити кількість перемикань. Ця альтернатива може мати таку послідовність операцій: після початкового вимірювання і розрахунку абераційних похибок для кожної точки Еi блок обробки інформації 34 визначає діапазон похибок, розділяє їх на декілька груп та передає ці дані в блок управління 33 для зондування кожної групи з певними значеннями оптичної сили електрично керованої лінзи 36. Використовуючи такий алгоритм, можна зменшити загальний час на перемикання лінзи 36. Наприклад, з тим же часом 10 мс на перемикання з одного значення корекції похибок до іншого, потрібно буде додати лише 50 мс для перемикання рідинної лінзи 36 в 6 різних станів. Функціонування запропонованого пристрою не обмежується описаними алгоритмами. Алгоритми можуть бути модифіковані в залежності від необхідної точності та можуть бути змінені у випадку використання більш швидкодіючих рідинних лінз. 35 ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 1. Швидкодіючий рейтрейсинговий просторово роздільний рефрактометр, що має в своєму складі канал позиціонування і акомодації, канал зондування, приймальний канал та канал управління і обробки інформації, причому канал позиціонування і акомодації складається з світлоподільника, об'єктива, відеокамери, ближньої марки, лінзи, рухомої уздовж оптичної осі, віддаленої марки та джерел світла для освітлення ближньої марки, віддаленої марки та ока, канал зондування складається з послідовно встановлених лазера, блока сканування та колімуючої лінзи, причому блок сканування складається з послідовно встановлених хдефлектора, електрично зв'язаного з драйвером х-дефлектора, та y-дефлектора, електрично зв'язаного з драйвером у-дефлектора, причому колімуюча лінза має точку переднього фокуса, що збігається з еквівалентним центром сканування блока сканування, приймальний канал складається з послідовно встановлених поляризаційного фільтра, апертурної діафрагми, об'єктива і позиційно-чутливого детектора, канал управління і обробки інформації складається з блока управління, блока обробки інформації і дисплея, причому блок управління електричним зв'язком сполучено з блоком обробки інформації і дисплеєм, вихід блока обробки інформації сполучено з дисплеєм, канал управління і обробки інформації сполучено з каналом зондування, каналом позиціонування і акомодації та приймальним каналом, канал позиціонування і акомодації, канал зондування і приймальний канал оптично пов'язані через світлоподільники, який відрізняється тим, що в канал зондування після колімуючої лінзи введено електрично керовану рідинну лінзу, між оком пацієнта та електрично керованою рідинною лінзою встановлено проекційну позитивну лінзу, розташовану на відстані від рідинної лінзи, що дорівнює двом фокусним відстаням проекційної позитивної лінзи, причому око пацієнта позиціоновано на відстань, що дорівнює двом фокусним відстаням проекційної позитивної лінзи, електрично керована рідинна лінза сполучена електричним зв'язком з каналом управління та 6 UA 104397 C2 5 10 обробки інформації, якому надано функцію обчислення кута нахилу зондуючого лазерного променя. 2. Швидкодіючий рейтрейсинговий просторово роздільний рефрактометр за п. 1, який відрізняється тим, що світлоподільник каналу зондування та приймального каналу розміщено між колімуючою лінзою та електрично керованою рідинною лінзою. 3. Швидкодіючий рейтрейсинговий просторово роздільний рефрактометр за п. 1, який відрізняється тим, що світлоподільник каналу зондування та приймального каналу розміщено між електрично керованою рідинною лінзою та проекційною позитивною лінзою, до складу приймального каналу введено другу електрично керовану рідинну лінзу так, щоб оптичний шлях між нею та проекційною позитивною лінзою складав подвоєну фокусну відстань проекційної позитивної лінзи, а обидві електрично керовані рідинні лінзи сполучені між собою електричним зв'язком. 7 UA 104397 C2 8 UA 104397 C2 9 UA 104397 C2 Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюMolebnyi Vasyl Vasyliovych, Serhiienko Mykola Markovych, Hordienko Valentyn Ivanovych, Mazurin Ihor Volodymyrovych, Burak Anatolii Vasyliovych
Автори російськоюМолебный Василий Васильевич, Сергиенко Николай Маркович, Гордиенко Валентин Иванович, Мазурин Игорь Владимирович, Бурак Анатолий Васильевич
МПК / Мітки
МПК: G01N 21/00, A61F 9/00, A61B 3/103, A61B 3/10
Мітки: швидкодіючий, роздільний, рейтрейсинговий, просторової, рефрактометр
Код посилання
<a href="https://ua.patents.su/12-104397-shvidkodiyuchijj-rejjtrejjsingovijj-prostorovo-rozdilnijj-refraktometr.html" target="_blank" rel="follow" title="База патентів України">Швидкодіючий рейтрейсинговий просторово роздільний рефрактометр</a>
Рефрактометр ока
Номер патенту: 58210
Опубліковано: 11.04.2011
Автори: Прожейко Юрій Борисович, Сокуренко Вячеслав Михайлович
МПК: A61B 3/103
Мітки: рефрактометр, ока
Формула / Реферат:
Рефрактометр ока з просторовим розділенням, що містить послідовно з'єднані лазерний випромінювач, телескопічну систему, два двокоординатні дефлектори, блок керування кутом відхилення, апертурну діафрагму, польову діафрагму, колімаційну лінзу, інтерференційно-поляризаційний світлоподільник, позиційно чутливий фотоприймач з об'єктивом, блок обробки та відображення інформації у складі комп'ютера, аналого-цифрового перетворювача,...
Автоматичний рефрактометр
Номер патенту: 57332
Опубліковано: 16.06.2003
Автори: Шабатура Юрій Васильович, Бугайов Юрій Володимирович
МПК: G01N 21/43
Мітки: рефрактометр, автоматичний
Формула / Реферат:
Автоматичний рефрактометр, що містить корпус, в якому розташоване зігнуте оптичне волокно вимірювального каналу, з'єднане з ним джерело оптичного випромінювання, два фотоприймачі, один із яких з'єднаний із зігнутим оптичним волокном вимірювального каналу та електронним пристроєм обробки інформації, який відрізняється тим, що в нього введено термодатчик, другий фотоприймач, з'єднаний із зігнутим оптичним волокном зворотного зв'язку, а...
Цифровий рефрактометр
Номер патенту: 86693
Опубліковано: 12.05.2009
Автори: Гарбарук Надія Станіславівна, Кондратов Владислав Тимофійович
МПК: G01N 21/41
Мітки: рефрактометр, цифровий
Формула / Реферат:
Цифровий рефрактометр, що містить послідовно розташовані на оптичній осі джерело оптичного випромінювання, фокусуючу лінзу, діафрагму та першу увігнуту лінзу, послідовно з'єднані між собою фотоприймач та аналого-цифровий перетворювач, локальну шину, загальну шину, оперативний запам'ятовуючий пристрій, постійний запам'ятовуючий пристрій, відліково-реєструючий пристрій та мікроконтролер, входи-виходи першого порту якого через локальну шину...
Офтальмологічний рефрактометр
Номер патенту: 74751
Опубліковано: 12.11.2012
Автори: Голембовський Олександр Олексійович, Чиж Ігор Генріхович, Шиша Тетяна Олександрівна
МПК: A61B 3/00, A61B 3/14, A61B 3/10, A61B 3/103
Мітки: рефрактометр, офтальмологічний
Формула / Реферат:
Офтальмологічний рефрактометр, що містить поєднані поляризаційним світлоподільником освітлювальний канал з джерелом світла та оптичною системою для формування світлової мікроплями на сітківці ока і фотоприймальний канал з об'єктивом та оптичною системою, що утворює зображення освітленої ділянки сітківки на світлочутливій поверхні фотоприймача зображень, який відрізняється тим, що додатково містить систему Бадаля та варіолінзу, розташовані...
Акустооптичний цифро-аналоговий перетворювач з просторово-часовим інтегруванням
Номер патенту: 29963
Опубліковано: 11.02.2008
Автори: Рудякова Ганна Миколаївна, Ліпінський Олександр Юрійович, Данилов Володимир Василійович
МПК: G02F 1/00, G06F 15/00, G06J 1/00, G02F 1/01
Мітки: акустооптичний, цифро-аналоговий, інтегруванням, просторово-часовим, перетворювач
Формула / Реферат:
Акустооптичний цифро-аналоговий перетворювач з просторово-часовим інтегруванням, що містить середовище акустооптичної взаємодії, збуджуване п'єзоелектричним перетворювачем, пристрій дискретизації електричного сигналу, що подає вхідний електричний сигнал у вигляді послідовності радіоімпульсів, заповнених частотою, яка забезпечує брегівський режим дифракції, який відрізняється тим, що додатково містить пристрій формування модульованого...
Попередній патент: Рекуператор
Наступний патент: Пристрій для вимірювання аберацій хвильового фронту
Випадковий патент: Пристрій для металоостеосинтезу переломів шийки стегна