Пристрій для вимірювання аберацій хвильового фронту
Номер патенту: 104398
Опубліковано: 27.01.2014
Автори: Молебний Василь Васильович, Сокуренко Вячеслав Михайлович
Формула / Реферат
Пристрій для вимірювання аберацій хвильового фронту, що має канал позиціонування і акомодації, канал зондування, приймальний канал та канал управління і обробки інформації, причому канал позиціонування і акомодації складається з світлоподільника, об'єктива, відеокамери, ближньої марки, лінзи, рухомої уздовж оптичної осі, віддаленої марки та джерел світла для освітлення ближньої марки, віддаленої марки та ока, канал зондування складається з послідовно встановлених лазера, блока сканування та колімуючої лінзи, причому блок сканування складається з послідовно встановлених х-дефлектора, електрично зв'язаного з драйвером х-дефлектора, та у-дефлектора, електрично зв'язаного з драйвером y- дефлектора, причому колімуюча лінза має точку переднього фокуса, що збігається з еквівалентним центром сканування блока сканування, приймальний канал складається з послідовно встановлених поляризаційного фільтра, апертурної діафрагми, об'єктива і позиційно-чутливого детектора, канал управління і обробки інформації складається з блока управління, блока обробки інформації і дисплея, причому блок управління сполучено електричним зв'язком з блоком обробки інформації і дисплеєм, вихід блока обробки інформації сполучено з дисплеєм, канал управління і обробки інформації сполучено з каналом зондування, каналом позиціонування і акомодації та приймальним каналом, канал позиціонування і акомодації, канал зондування і приймальний канал оптично пов'язані через світлоподільники, який відрізняється тим, що між колімуючою лінзою і оком в ділянці оптичного шляху, спільній для каналу зондування та приймального каналу, встановлена оптична система спряження, яка складається з першої електрично керованої рідинної лінзи і другої електрично керованої рідинної лінзи з фіксованою відстанню між ними, причому кожна з електрично керованих рідинних лінз сполучена з каналом управління і обробки інформації, якому надано функцію розрахунку поправки на їх оптичну силу та вироблення сигналів управління ними так, щоб нахилом лазерного променя в кожній точці зондування зіниці ока лазерний промінь був спрямований до перерізу з зоровою віссю ока в площині сітківки.
Текст
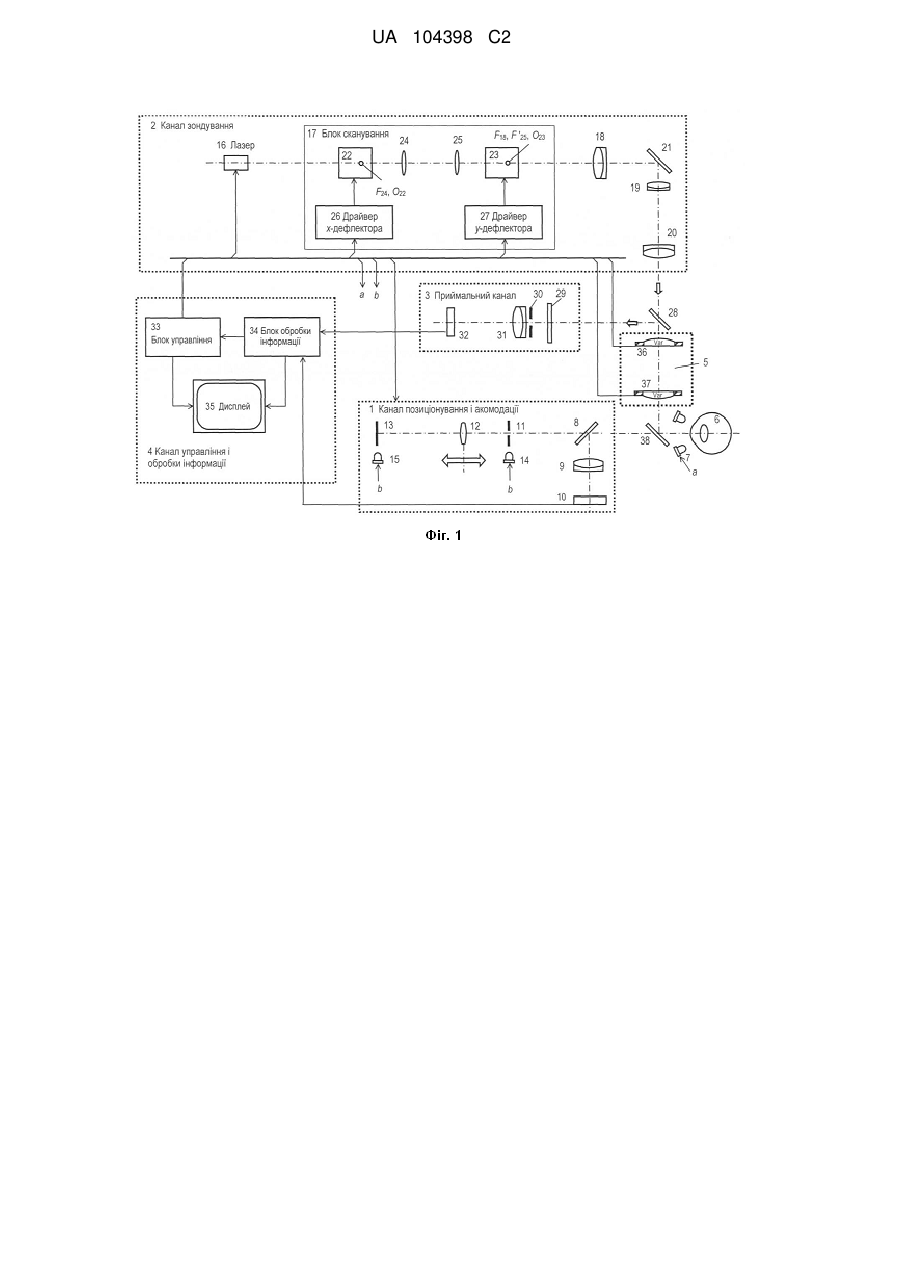
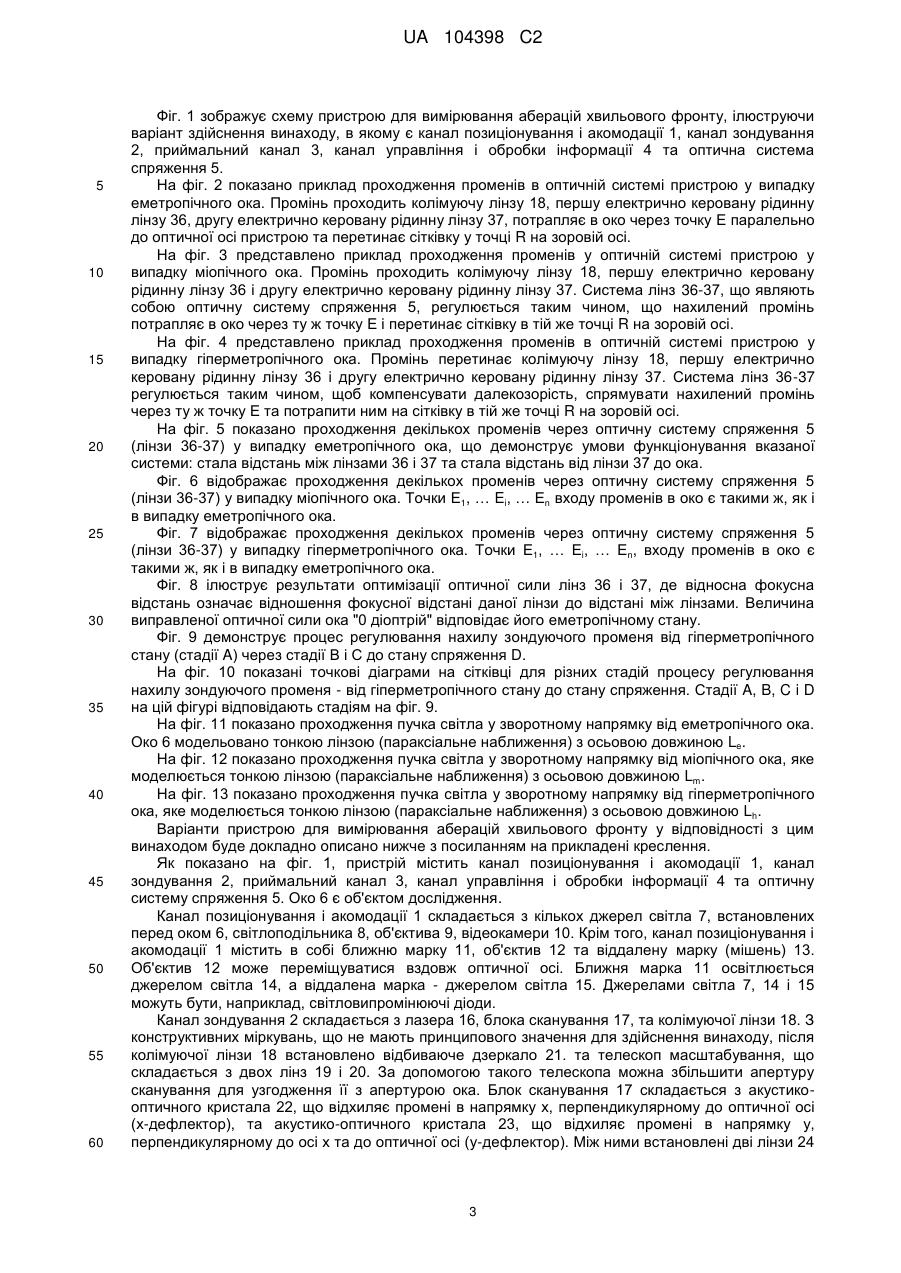
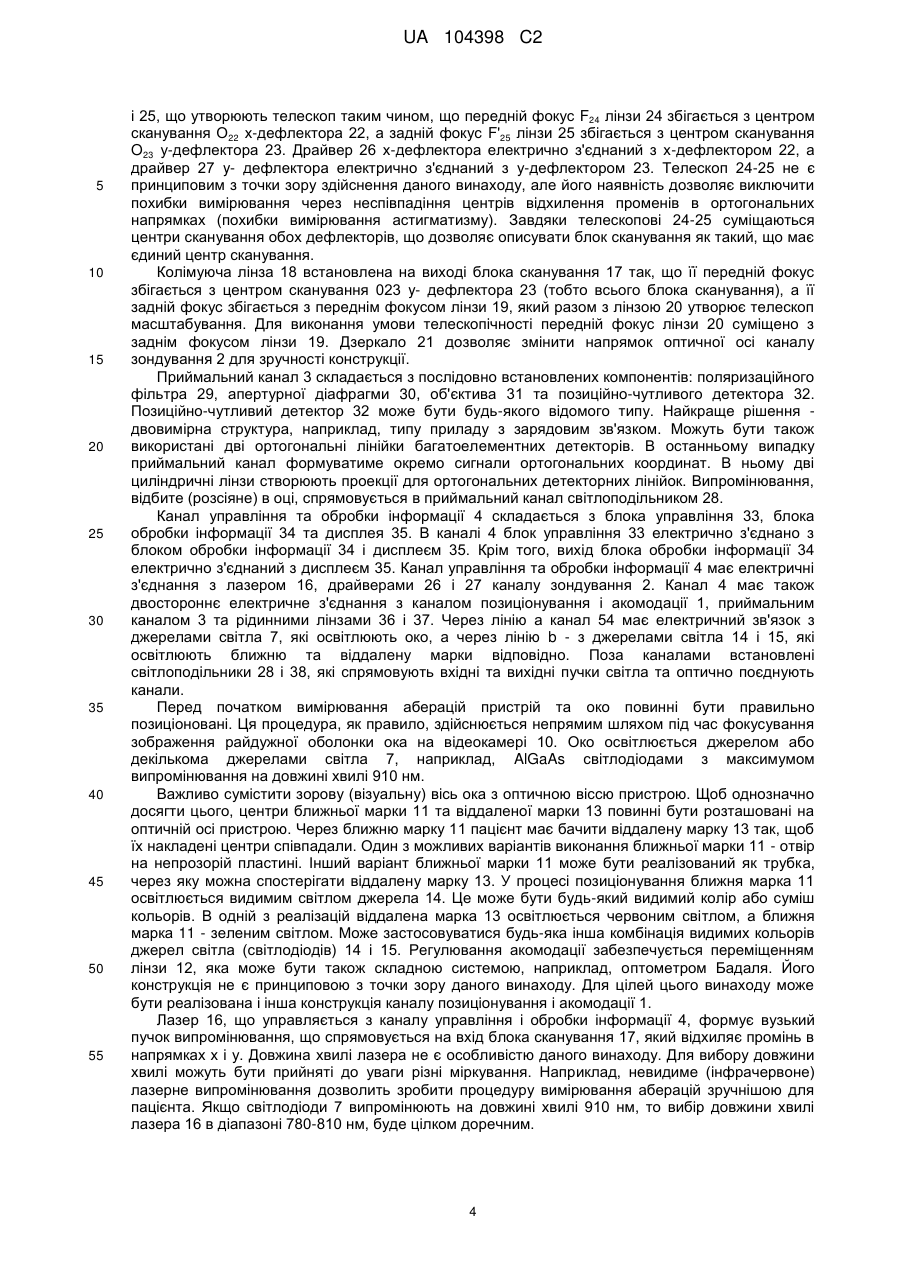
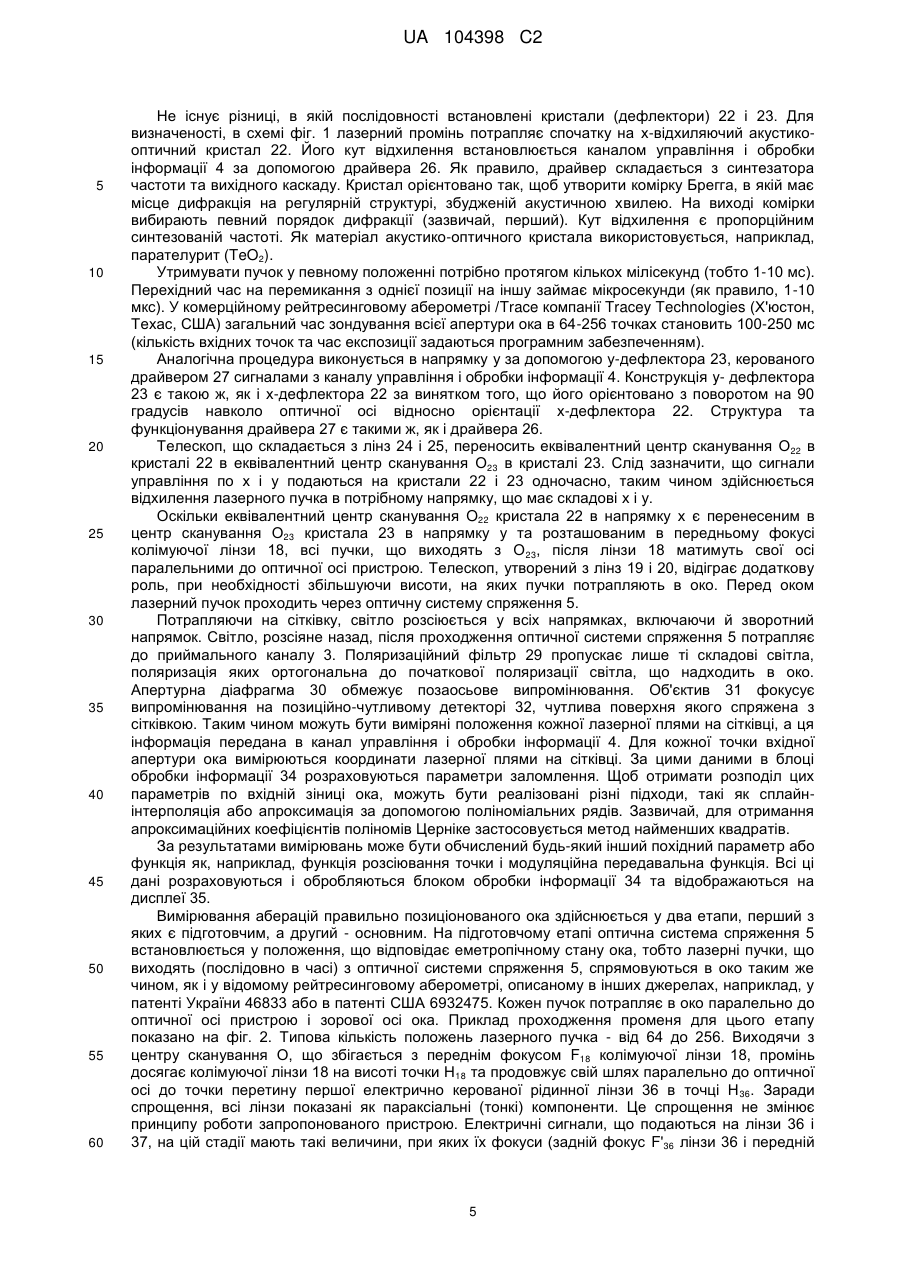
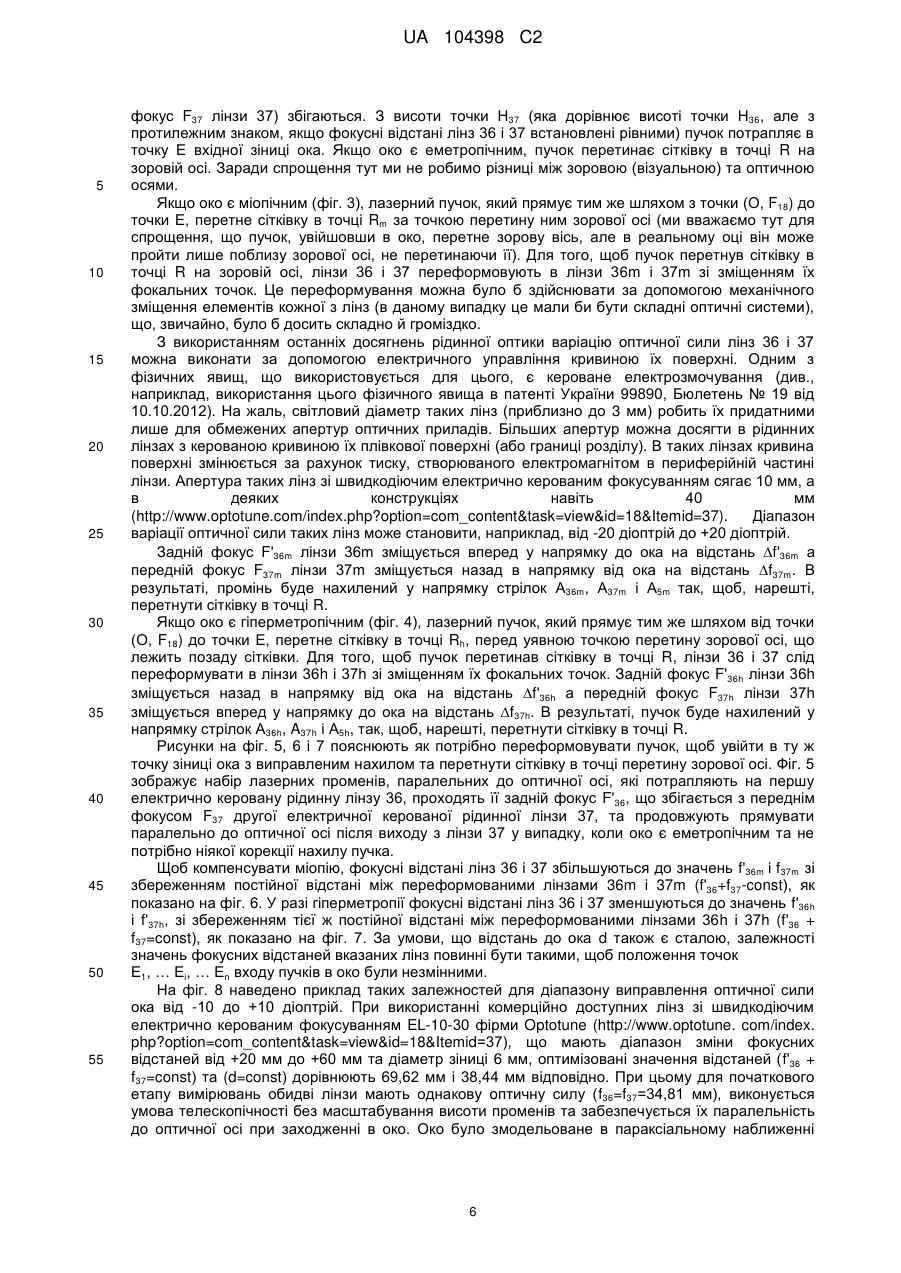
Реферат: Винахід належить до галузі медичного приладобудування, зокрема до офтальмологічних пристроїв, що використовуються при дослідженні ока, наприклад для офтальмологічного обстеження та вимірювання абераційних характеристик оптичної системи ока людини, зокрема, з метою корекції зору, особливо до таких пристроїв, що забезпечують високу точність вимірювань. Запропоновано пристрій для вимірювання аберацій хвильового фронту, який використовує принцип рейтрейсингу, з внесенням поправок на нахил лазерного променя при зондуванні ока так, щоб в оці лазерний промінь перетнув зорову вісь в площині сітківки. Пристрій має канал позиціонування і акомодації, канал зондування, приймальний канал, канал управління і обробки інформації та оптичну систему спряження, яка складається з першої електрично керованої рідинної лінзи і другої електрично керованої рідинної лінзи, встановлених між оком та каналом зондування з фіксованою відстанню між ними, причому кожна з електрично керованих рідинних лінз сполучена з каналом управління і обробки інформації, якому надано функцію розрахунку поправки на їх оптичну силу та вироблення сигналів управління ними так, щоб нахилом лазерного променя в кожній точці зондування зіниці ока лазерний промінь був спрямований до перерізу з зоровою віссю ока в площині сітківки. UA 104398 C2 (12) UA 104398 C2 UA 104398 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі медичного приладобудування, зокрема до офтальмологічних пристроїв, що використовуються при дослідженні ока, наприклад для офтальмологічного обстеження та вимірювання абераційних характеристик оптичної системи ока людини, зокрема, з метою корекції зору, особливо до таких пристроїв, що забезпечують високу точність вимірювань. Пристрої для вимірювання аберацій людського ока поділяються на дві групи - суб'єктивні та об'єктивні. Приклади описано С.М. Смірновим ("Измерение аберраций человеческого глаза". Биофизика, 1961, № 6, с. 687-703) та С. М. Penney et al. (патент США 5258791). За нових часів використовують датчик хвильового фронту Гартмана-Шека (J. Liang et al. "Objective measurement of wave aberrations of the human eye with the use of a Hartmann-Shack wave-front sensor". Journal of the Optical Society of America, 1994, Vol. 11, No. 7, pp. 1949-1957). Згідно з цим підходом зображення точкової проекції лазерного пучка на сітківку відображають за допомогою матриці мікролінз датчика хвильового фронту Гатмана-Шека на фоточутливій поверхні приладу з зарядовим зв'язком (ПЗЗ), що входить до складу відеокамери. З отриманих даних реконструюють карту хвильового фронту (точніше, карту його спотворення), а також карту рефракційних похибок. Рейтресинговий підхід (В.В. Молебний та ін., "Вимірювач абераційної рефракції ока". Патент України 46833, Бюлетень № 6, 17.06.2002) базується на поточковій процедурі зондування ока тонким лазерним пучком. За цим методом вимірюється положення світлової плями, створюваної лазерним пучком на сітківці, для кожної вхідної точки на зіниці та реконструюється карта хвильового фронту, карта рефракційних похибок та інші характеристики, похідні від цих параметрів. Принцип одночасної проекції регулярної структури світла на сітківку був реалізований в аберометрі, описаному P. Mierdel та ін. ("Ocular optical aberrometer for clinical use". Journal of Biomedical Optics, 2001, Vol. 6, No. 2, pp. 200-204). Цей принцип походить від абероскопа Чернінга (Tscherning). Колімований лазерний пучок освітлює маску з регулярною матрицею отворів, утворюючи систему тонких паралельних пучків діаметром 0,3 мм. Ці пучки фокусуються додатковою лінзою, встановленою перед оком так, що їх внутрішньоочна точка фокусування знаходиться на певній відстані перед сітківкою. Завдяки цьому створюється картина світлових плям на сітківці, в якій кожному отворові матриці відповідає своя пляма на сітківці. Картину світлових плям відображає відеокамера. Далі вимірюються відхилення положення плям від своїх ідеальних положень та обчислюються значення аберацій хвильового фронту. Інший принцип вимірювання аберацій був запропонований М. Fujieda (патент США 5907388), його реалізація в аберометрі компанії Nidek описана S. MacRae та ін. ("Slit skiascopic-guided ablation using the Nidek laser". Journal of Refractive Surgery, 2000, Vol. 16, No. 5, pp. S576-S580). В ньому на сітківку проектуються рухомі смуги світла, детектуються їх зображення та вимірюються фази. Ці фази й відображають ступінь аметропії вздовж напрямку руху смуг. Кожен зі згаданих аберометрів має свої обмеження. Для досягнення більш високої точності було запропоновано декілька нових методів і пристроїв для вимірювання аберацій оптичної системи ока людини. Спочатку J. Liang описав ідею досягнення надприродного бачення ("Supernormal vision and high-resolution retinal imaging through adaptive optics". Journal of the Optical Society of America, 1994, Vol. 14, No. 11, pp. 2884-2892), базуючись на досягненнях, що беруть свій початок в астрономії. Застосовуючи цей підхід до вимірювання аберацій, D. R. Williams та ін. (патент США 5777719) використали вихідний сигнал пристрою, що вимірює хвильовий фронт, для компенсації спотвореного хвильового фронту (за допомогою дзеркала, що може змінювати свою форму), компенсуючи таким чином аберації ока. B. М. Levine та ін. (патент США 6709108) описали офтальмологічний пристрій для дослідження людського ока in vivo. Датчик хвильового фронту цього пристрою вимірює спотворення зображення, а потім компенсує їх за допомогою фазового компенсатора, що здійснює просторову модуляцію фази падаючого світла. Зображення зі скомпенсованими абераціями відображається у людському оці без спотворень. C. Campbell (патент США 7128416) запропонував метод вимірювання оптичних аберацій оптичної системи ока людини, що включає в себе адаптивний оптичний елемент, розташований на оптичному шляху між оптичною системою ока і датчиком. Адаптивний оптичний елемент регулюється у відповідності до сигналу датчика аберацій так, щоб компенсувати виміряні аберації, забезпечуючи спряження хвильового фронту. На жаль, як зазначав С. Campbell (патент США 7128416), скоригована форма дзеркала, що деформується, прямо не вказує лікарю на фактичні величини аберацій ока пацієнта. Отже, потрібно застосовувати складну схему калібрування, щоб керуючі сигнали, які використовуються для деформації дзеркала, були пов'язані з абераціями ока пацієнта. 1 UA 104398 C2 5 10 15 20 25 30 35 40 45 50 55 Іншим недоліком спряження хвильового фронту за допомогою активної оптики є те, що в загальному випадку координати елементарних дзеркал, що контролюють нахил хвильового фронту, не збігаються з координатами датчиків Гартмана-Шека. Це означає, що необхідні нахили хвильового фронту в точках корекції не вимірюються безпосередньо, а мають бути апроксимовані за даними, отриманими в точках з іншими координатами. Ще одним недоліком деяких з перерахованих вище методів є потреба у суб'єктивній оцінці того, наскільки ідеальним є досягнуте спряження. Іншою особливістю коригування хвильового фронту за допомогою активної оптики є його висока вартість, особливо при використанні фотолітографічних технологій виготовлення матриці активної оптики з високою просторовою щільністю, що отримала назву MEMS - мікроелектро-механічні структури (F.-Y. Chen et al., патент США 7205176). Як відомо з попередніх досліджень (V. Molebny. Wavefront conjugated ray tracing aberrometry. Proc. SPIE, Vol. 7885, Ophthalmic Technologies XXI, February 2011), під час вимірювання аберацій оптична система ока виконує двояку роль - як об'єкт вимірювання, та як складова частина аберометра. Це означає, що аберації, які мають бути виміряні, самі є джерелом похибок вимірювань. Чим більшими є ці аберації, тим більшими є похибки вимірювань. З цієї точки зору, найкращим рішенням могло б бути повне спряження оптичної системи пристрою для вимірювання аберацій. Проте це неможливо зробити за один крок, тому що інформація про аберації містить у собі вищезазначені похибки самої оптичної системи ока. Молебним було запропоновано (патентна заявка США 2010/0271595, опублікована 28.10.2010) зробити спряження з використанням двох наборів акустико-оптичних дефлекторів та розділити задачу спряження на дві складові: (1) позиціонування пучка на попередньо розраховану висоту (перша пара х- і y- дефлекторів) та (2) його нахил на попередньо розраховані кути так, щоб увійти в ту ж саму точку апертури ока й одночасно компенсувати аберації для цієї точки апертури (друга пара х- і y - дефлекторів). Недоліком цього рішення є апаратурне ускладнення пристрою через використання другої пари акустико-оптичних дефлекторів, для управління якими потрібна ще одна пара драйверів. Такі складнощі породжують потребу у пристрої для вимірювання аберацій хвильового фронту з більш високою точністю, яка б досягалась за рахунок апаратурного спрощення та зменшення помилок, що вносяться самою оптичною системою ока. Тому задачею даного винаходу є створення удосконаленого пристрою для вимірювання аберацій хвильового фронту, в якому згаданих вище недоліків було б істотно менше. Нами пропонується пристрій для вимірювання аберацій хвильового фронту, що має канал позиціонування і акомодації, канал зондування, приймальний канал та канал управління і обробки інформації. Канал позиціонування і акомодації складається із світлоподільника, об'єктива, відеокамери, ближньої марки, лінзи, рухомої уздовж оптичної осі, віддаленої марки та джерел світла для освітлення ближньої марки, віддаленої марки та ока. Канал зондування складається з послідовно встановлених лазера, блока сканування та колімуючої лінзи, причому блок сканування складається з послідовно встановлених хдефлектора, електрично зв'язаного з драйвером х-дефлектора, та у-дефлектора, електрично зв'язаного з драйвером y- дефлектора, причому колімуюча лінза має точку переднього фокусу, що збігається з еквівалентним центром сканування блока сканування. Приймальний канал складається з послідовно встановлених поляризаційного фільтра, апертурної діафрагми, об'єктива і позиційно-чутливого детектора. Канал управління і обробки інформації складається з блока управління, блока обробки інформації і дисплея, причому блок управління електрично сполучений з блоком обробки інформації і дисплеєм, вихід блока обробки інформації електрично сполучений з дисплеєм, канал управління і обробки інформації електрично сполучено з каналом зондування, каналом позиціонування і акомодації та приймальним каналом, канал позиціонування і акомодації, канал зондування і приймальний канал оптично пов'язані через світлоподільники. Відмінністю запропонованого винаходу є введення оптичної системи спряження між колімуючою лінзою і оком в ділянці оптичного шляху, спільній для каналу зондування та приймального каналу. Ця система складається з послідовно встановлених першої електрично керованої рідинної лінзи і другої електрично керованої рідинної лінзи з фіксованою відстанню між ними, сполучених з каналом управління і обробки інформації, якому надано функцію розрахунку оптичної сили кожної з електрично керованих рідинних лінз та вироблення сигналів управління ними так, щоб нахилом лазерного променя в кожній точці зондування зіниці ока цей лазерний промінь був спрямований до перерізу його з зоровою віссю ока в площині сітківки. 2 UA 104398 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 1 зображує схему пристрою для вимірювання аберацій хвильового фронту, ілюструючи варіант здійснення винаходу, в якому є канал позиціонування і акомодації 1, канал зондування 2, приймальний канал 3, канал управління і обробки інформації 4 та оптична система спряження 5. На фіг. 2 показано приклад проходження променів в оптичній системі пристрою у випадку еметропічного ока. Промінь проходить колімуючу лінзу 18, першу електрично керовану рідинну лінзу 36, другу електрично керовану рідинну лінзу 37, потрапляє в око через точку Е паралельно до оптичної осі пристрою та перетинає сітківку у точці R на зоровій осі. На фіг. 3 представлено приклад проходження променів у оптичній системі пристрою у випадку міопічного ока. Промінь проходить колімуючу лінзу 18, першу електрично керовану рідинну лінзу 36 і другу електрично керовану рідинну лінзу 37. Система лінз 36-37, що являють собою оптичну систему спряження 5, регулюється таким чином, що нахилений промінь потрапляє в око через ту ж точку Е і перетинає сітківку в тій же точці R на зоровій осі. На фіг. 4 представлено приклад проходження променів в оптичній системі пристрою у випадку гіперметропічного ока. Промінь перетинає колімуючу лінзу 18, першу електрично керовану рідинну лінзу 36 і другу електрично керовану рідинну лінзу 37. Система лінз 36-37 регулюється таким чином, щоб компенсувати далекозорість, спрямувати нахилений промінь через ту ж точку Е та потрапити ним на сітківку в тій же точці R на зоровій осі. На фіг. 5 показано проходження декількох променів через оптичну систему спряження 5 (лінзи 36-37) у випадку еметропічного ока, що демонструє умови функціонування вказаної системи: стала відстань між лінзами 36 і 37 та стала відстань від лінзи 37 до ока. Фіг. 6 відображає проходження декількох променів через оптичну систему спряження 5 (лінзи 36-37) у випадку міопічного ока. Точки Е1, … Ei, … Еn входу променів в око є такими ж, як і в випадку еметропічного ока. Фіг. 7 відображає проходження декількох променів через оптичну систему спряження 5 (лінзи 36-37) у випадку гіперметропічного ока. Точки Е1, … Еi, … Еn, входу променів в око є такими ж, як і в випадку еметропічного ока. Фіг. 8 ілюструє результати оптимізації оптичної сили лінз 36 і 37, де відносна фокусна відстань означає відношення фокусної відстані даної лінзи до відстані між лінзами. Величина виправленої оптичної сили ока "0 діоптрій" відповідає його еметропічному стану. Фіг. 9 демонструє процес регулювання нахилу зондуючого променя від гіперметропічного стану (стадії A) через стадії В і С до стану спряження D. На фіг. 10 показані точкові діаграми на сітківцідля різних стадій процесу регулювання нахилу зондуючого променя - від гіперметропічного стану до стану спряження. Стадії A, B, C i D на цій фігурі відповідають стадіям на фіг. 9. На фіг. 11 показано проходження пучка світла у зворотному напрямку від еметропічного ока. Око 6 модельовано тонкою лінзою (параксіальне наближення) з осьовою довжиною Lе. На фіг. 12 показано проходження пучка світла у зворотному напрямку від міопічного ока, яке моделюється тонкою лінзою (параксіальне наближення) з осьовою довжиною Lm. На фіг. 13 показано проходження пучка світла у зворотному напрямку від гіперметропічного ока, яке моделюється тонкою лінзою (параксіальне наближення) з осьовою довжиною Lh. Варіанти пристрою для вимірювання аберацій хвильового фронту у відповідності з цим винаходом буде докладно описано нижче з посиланням на прикладені креслення. Як показано на фіг. 1, пристрій містить канал позиціонування і акомодації 1, канал зондування 2, приймальний канал 3, канал управління і обробки інформації 4 та оптичну систему спряження 5. Око 6 є об'єктом дослідження. Канал позиціонування і акомодації 1 складається з кількох джерел світла 7, встановлених перед оком 6, світлоподільника 8, об'єктива 9, відеокамери 10. Крім того, канал позиціонування і акомодації 1 містить в собі ближню марку 11, об'єктив 12 та віддалену марку (мішень) 13. Об'єктив 12 може переміщуватися вздовж оптичної осі. Ближня марка 11 освітлюється джерелом світла 14, а віддалена марка - джерелом світла 15. Джерелами світла 7, 14 і 15 можуть бути, наприклад, світловипромінюючі діоди. Канал зондування 2 складається з лазера 16, блока сканування 17, та колімуючої лінзи 18. З конструктивних міркувань, що не мають принципового значення для здійснення винаходу, після колімуючої лінзи 18 встановлено відбиваюче дзеркало 21. та телескоп масштабування, що складається з двох лінз 19 і 20. За допомогою такого телескопа можна збільшити апертуру сканування для узгодження її з апертурою ока. Блок сканування 17 складається з акустикооптичного кристала 22, що відхиляє промені в напрямку х, перпендикулярному до оптичної осі (х-дефлектор), та акустико-оптичного кристала 23, що відхиляє промені в напрямку у, перпендикулярному до осі х та до оптичної осі (у-дефлектор). Між ними встановлені дві лінзи 24 3 UA 104398 C2 5 10 15 20 25 30 35 40 45 50 55 і 25, що утворюють телескоп таким чином, що передній фокус F24 лінзи 24 збігається з центром сканування О22 х-дефлектора 22, а задній фокус F'25 лінзи 25 збігається з центром сканування O23 у-дефлектора 23. Драйвер 26 х-дефлектора електрично з'єднаний з х-дефлектором 22, а драйвер 27 y- дефлектора електрично з'єднаний з у-дефлектором 23. Телескоп 24-25 не є принциповим з точки зору здійснення даного винаходу, але його наявність дозволяє виключити похибки вимірювання через неспівпадіння центрів відхилення променів в ортогональних напрямках (похибки вимірювання астигматизму). Завдяки телескопові 24-25 суміщаються центри сканування обох дефлекторів, що дозволяє описувати блок сканування як такий, що має єдиний центр сканування. Колімуюча лінза 18 встановлена на виході блока сканування 17 так, що її передній фокус збігається з центром сканування 023 y- дефлектора 23 (тобто всього блока сканування), а її задній фокус збігається з переднім фокусом лінзи 19, який разом з лінзою 20 утворює телескоп масштабування. Для виконання умови телескопічності передній фокус лінзи 20 суміщено з заднім фокусом лінзи 19. Дзеркало 21 дозволяє змінити напрямок оптичної осі каналу зондування 2 для зручності конструкції. Приймальний канал 3 складається з послідовно встановлених компонентів: поляризаційного фільтра 29, апертурної діафрагми 30, об'єктива 31 та позиційно-чутливого детектора 32. Позиційно-чутливий детектор 32 може бути будь-якого відомого типу. Найкраще рішення двовимірна структура, наприклад, типу приладу з зарядовим зв'язком. Можуть бути також використані дві ортогональні лінійки багатоелементних детекторів. В останньому випадку приймальний канал формуватиме окремо сигнали ортогональних координат. В ньому дві циліндричні лінзи створюють проекції для ортогональних детекторних лінійок. Випромінювання, відбите (розсіяне) в оці, спрямовується в приймальний канал світлоподільником 28. Канал управління та обробки інформації 4 складається з блока управління 33, блока обробки інформації 34 та дисплея 35. В каналі 4 блок управління 33 електрично з'єднано з блоком обробки інформації 34 і дисплеєм 35. Крім того, вихід блока обробки інформації 34 електрично з'єднаний з дисплеєм 35. Канал управління та обробки інформації 4 має електричні з'єднання з лазером 16, драйверами 26 і 27 каналу зондування 2. Канал 4 має також двостороннє електричне з'єднання з каналом позиціонування і акомодації 1, приймальним каналом 3 та рідинними лінзами 36 і 37. Через лінію а канал 54 має електричний зв'язок з джерелами світла 7, які освітлюють око, а через лінію b - з джерелами світла 14 і 15, які освітлюють ближню та віддалену марки відповідно. Поза каналами встановлені світлоподільники 28 і 38, які спрямовують вхідні та вихідні пучки світла та оптично поєднують канали. Перед початком вимірювання аберацій пристрій та око повинні бути правильно позиціоновані. Ця процедура, як правило, здійснюється непрямим шляхом під час фокусування зображення райдужної оболонки ока на відеокамері 10. Око освітлюється джерелом або декількома джерелами світла 7, наприклад, AlGaAs світлодіодами з максимумом випромінювання на довжині хвилі 910 нм. Важливо сумістити зорову (візуальну) вісь ока з оптичною віссю пристрою. Щоб однозначно досягти цього, центри ближньої марки 11 та віддаленої марки 13 повинні бути розташовані на оптичній осі пристрою. Через ближню марку 11 пацієнт має бачити віддалену марку 13 так, щоб їх накладені центри співпадали. Один з можливих варіантів виконання ближньої марки 11 - отвір на непрозорій пластині. Інший варіант ближньої марки 11 може бути реалізований як трубка, через яку можна спостерігати віддалену марку 13. У процесі позиціонування ближня марка 11 освітлюється видимим світлом джерела 14. Це може бути будь-який видимий колір або суміш кольорів. В одній з реалізацій віддалена марка 13 освітлюється червоним світлом, а ближня марка 11 - зеленим світлом. Може застосовуватися будь-яка інша комбінація видимих кольорів джерел світла (світлодіодів) 14 і 15. Регулювання акомодації забезпечується переміщенням лінзи 12, яка може бути також складною системою, наприклад, оптометром Бадаля. Його конструкція не є принциповою з точки зору даного винаходу. Для цілей цього винаходу може бути реалізована і інша конструкція каналу позиціонування і акомодації 1. Лазер 16, що управляється з каналу управління і обробки інформації 4, формує вузький пучок випромінювання, що спрямовується на вхід блока сканування 17, який відхиляє промінь в напрямках х і у. Довжина хвилі лазера не є особливістю даного винаходу. Для вибору довжини хвилі можуть бути прийняті до уваги різні міркування. Наприклад, невидиме (інфрачервоне) лазерне випромінювання дозволить зробити процедуру вимірювання аберацій зручнішою для пацієнта. Якщо світлодіоди 7 випромінюють на довжині хвилі 910 нм, то вибір довжини хвилі лазера 16 в діапазоні 780-810 нм, буде цілком доречним. 4 UA 104398 C2 5 10 15 20 25 30 35 40 45 50 55 60 Не існує різниці, в якій послідовності встановлені кристали (дефлектори) 22 і 23. Для визначеності, в схемі фіг. 1 лазерний промінь потрапляє спочатку на х-відхиляючий акустикооптичний кристал 22. Його кут відхилення встановлюється каналом управління і обробки інформації 4 за допомогою драйвера 26. Як правило, драйвер складається з синтезатора частоти та вихідного каскаду. Кристал орієнтовано так, щоб утворити комірку Брегга, в якій має місце дифракція на регулярній структурі, збудженій акустичною хвилею. На виході комірки вибирають певний порядок дифракції (зазвичай, перший). Кут відхилення є пропорційним синтезованій частоті. Як матеріал акустико-оптичного кристала використовується, наприклад, парателурит (TeO2). Утримувати пучок у певному положенні потрібно протягом кількох мілісекунд (тобто 1-10 мс). Перехідний час на перемикання з однієї позиції на іншу займає мікросекунди (як правило, 1-10 мкс). У комерційному рейтресинговому аберометрі /Trace компанії Tracey Technologies (Х'юстон, Техас, США) загальний час зондування всієї апертури ока в 64-256 точках становить 100-250 мс (кількість вхідних точок та час експозиції задаються програмним забезпеченням). Аналогічна процедура виконується в напрямку у за допомогою у-дефлектора 23, керованого драйвером 27 сигналами з каналу управління і обробки інформації 4. Конструкція y- дефлектора 23 є такою ж, як і х-дефлектора 22 за винятком того, що його орієнтовано з поворотом на 90 градусів навколо оптичної осі відносно орієнтації х-дефлектора 22. Структура та функціонування драйвера 27 є такими ж, як і драйвера 26. Телескоп, що складається з лінз 24 і 25, переносить еквівалентний центр сканування О22 в кристалі 22 в еквівалентний центр сканування О23 в кристалі 23. Слід зазначити, що сигнали управління по х і у подаються на кристали 22 і 23 одночасно, таким чином здійснюється відхилення лазерного пучка в потрібному напрямку, що має складові х і у. Оскільки еквівалентний центр сканування O22 кристала 22 в напрямку х є перенесеним в центр сканування О23 кристала 23 в напрямку у та розташованим в передньому фокусі колімуючої лінзи 18, всі пучки, що виходять з О 23, після лінзи 18 матимуть свої осі паралельними до оптичної осі пристрою. Телескоп, утворений з лінз 19 і 20, відіграє додаткову роль, при необхідності збільшуючи висоти, на яких пучки потрапляють в око. Перед оком лазерний пучок проходить через оптичну систему спряження 5. Потрапляючи на сітківку, світло розсіюється у всіх напрямках, включаючи й зворотний напрямок. Світло, розсіяне назад, після проходження оптичної системи спряження 5 потрапляє до приймального каналу 3. Поляризаційний фільтр 29 пропускає лише ті складові світла, поляризація яких ортогональна до початкової поляризації світла, що надходить в око. Апертурна діафрагма 30 обмежує позаосьове випромінювання. Об'єктив 31 фокусує випромінювання на позиційно-чутливому детекторі 32, чутлива поверхня якого спряжена з сітківкою. Таким чином можуть бути виміряні положення кожної лазерної плями на сітківці, а ця інформація передана в канал управління і обробки інформації 4. Для кожної точки вхідної апертури ока вимірюються координати лазерної плями на сітківці. За цими даними в блоці обробки інформації 34 розраховуються параметри заломлення. Щоб отримати розподіл цих параметрів по вхідній зіниці ока, можуть бути реалізовані різні підходи, такі як сплайнінтерполяція або апроксимація за допомогою поліноміальних рядів. Зазвичай, для отримання апроксимаційних коефіцієнтів поліномів Церніке застосовується метод найменших квадратів. За результатами вимірювань може бути обчислений будь-який інший похідний параметр або функція як, наприклад, функція розсіювання точки і модуляційна передавальна функція. Всі ці дані розраховуються і обробляються блоком обробки інформації 34 та відображаються на дисплеї 35. Вимірювання аберацій правильно позиціонованого ока здійснюється у два етапи, перший з яких є підготовчим, а другий - основним. На підготовчому етапі оптична система спряження 5 встановлюється у положення, що відповідає еметропічному стану ока, тобто лазерні пучки, що виходять (послідовно в часі) з оптичної системи спряження 5, спрямовуються в око таким же чином, як і у відомому рейтресинговому аберометрі, описаному в інших джерелах, наприклад, у патенті України 46833 або в патенті США 6932475. Кожен пучок потрапляє в око паралельно до оптичної осі пристрою і зорової осі ока. Приклад проходження променя для цього етапу показано на фіг. 2. Типова кількість положень лазерного пучка - від 64 до 256. Виходячи з центру сканування О, що збігається з переднім фокусом F18 колімуючої лінзи 18, промінь досягає колімуючої лінзи 18 на висоті точки Н18 та продовжує свій шлях паралельно до оптичної осі до точки перетину першої електрично керованої рідинної лінзи 36 в точці Н 36. Заради спрощення, всі лінзи показані як параксіальні (тонкі) компоненти. Це спрощення не змінює принципу роботи запропонованого пристрою. Електричні сигнали, що подаються на лінзи 36 і 37, на цій стадії мають такі величини, при яких їх фокуси (задній фокус F'36 лінзи 36 і передній 5 UA 104398 C2 5 10 15 20 25 30 35 40 45 50 55 фокус F37 лінзи 37) збігаються. З висоти точки Н37 (яка дорівнює висоті точки Н36, але з протилежним знаком, якщо фокусні відстані лінз 36 і 37 встановлені рівними) пучок потрапляє в точку Е вхідної зіниці ока. Якщо око є еметропічним, пучок перетинає сітківку в точці R на зоровій осі. Заради спрощення тут ми не робимо різниці між зоровою (візуальною) та оптичною осями. Якщо око є міопічним (фіг. 3), лазерний пучок, який прямує тим же шляхом з точки (О, F18) до точки Е, перетне сітківку в точці Rm за точкою перетину ним зорової осі (ми вважаємо тут для спрощення, що пучок, увійшовши в око, перетне зорову вісь, але в реальному оці він може пройти лише поблизу зорової осі, не перетинаючи її). Для того, щоб пучок перетнув сітківку в точці R на зоровій осі, лінзи 36 і 37 переформовують в лінзи 36m і 37m зі зміщенням їх фокальних точок. Це переформування можна було б здійснювати за допомогою механічного зміщення елементів кожної з лінз (в даному випадку це мали би бути складні оптичні системи), що, звичайно, було б досить складно й громіздко. З використанням останніх досягнень рідинної оптики варіацію оптичної сили лінз 36 і 37 можна виконати за допомогою електричного управління кривиною їх поверхні. Одним з фізичних явищ, що використовується для цього, є кероване електрозмочування (див., наприклад, використання цього фізичного явища в патенті України 99890, Бюлетень № 19 від 10.10.2012). На жаль, світловий діаметр таких лінз (приблизно до 3 мм) робить їх придатними лише для обмежених апертур оптичних приладів. Більших апертур можна досягти в рідинних лінзах з керованою кривиною їх плівкової поверхні (або границі розділу). В таких лінзах кривина поверхні змінюється за рахунок тиску, створюваного електромагнітом в периферійній частині лінзи. Апертура таких лінз зі швидкодіючим електрично керованим фокусуванням сягає 10 мм, а в деяких конструкціях навіть 40 мм (http://www.optotune.com/index.php?option=com_content&task=view&id=18&Itemid=37). Діапазон варіації оптичної сили таких лінз може становити, наприклад, від -20 діоптрій до +20 діоптрій. Задній фокус F'36m лінзи 36m зміщується вперед у напрямку до ока на відстань f'36m а передній фокус F37m лінзи 37m зміщується назад в напрямку від ока на відстань f37m. В результаті, промінь буде нахилений у напрямку стрілок А36m, А37m і А5m так, щоб, нарешті, перетнути сітківку в точці R. Якщо око є гіперметропічним (фіг. 4), лазерний пучок, який прямує тим же шляхом від точки (О, F18) до точки Е, перетне сітківку в точці Rh, перед уявною точкою перетину зорової осі, що лежить позаду сітківки. Для того, щоб пучок перетинав сітківку в точці R, лінзи 36 і 37 слід переформувати в лінзи 36h і 37h зі зміщенням їх фокальних точок. Задній фокус F'36h лінзи 36h зміщується назад в напрямку від ока на відстань f'36h а передній фокус F37h лінзи 37h зміщується вперед у напрямку до ока на відстань f37h. В результаті, пучок буде нахилений у напрямку стрілок А36h, A37h і А5h, так, щоб, нарешті, перетнути сітківку в точці R. Рисунки на фіг. 5, 6 і 7 пояснюють як потрібно переформовувати пучок, щоб увійти в ту ж точку зіниці ока з виправленим нахилом та перетнути сітківку в точці перетину зорової осі. Фіг. 5 зображує набір лазерних променів, паралельних до оптичної осі, які потрапляють на першу електрично керовану рідинну лінзу 36, проходять її задній фокус F'36, що збігається з переднім фокусом F37 другої електричної керованої рідинної лінзи 37, та продовжують прямувати паралельно до оптичної осі після виходу з лінзи 37 у випадку, коли око є еметропічним та не потрібно ніякої корекції нахилу пучка. Щоб компенсувати міопію, фокусні відстані лінз 36 і 37 збільшуються до значень f'36m і f37m зі збереженням постійної відстані між переформованими лінзами 36m і 37m (f'36+f37-const), як показано на фіг. 6. У разі гіперметропії фокусні відстані лінз 36 і 37 зменшуються до значень f'36h і f'37h, зі збереженням тієї ж постійної відстані між переформованими лінзами 36h і 37h (f'36 + f37=const), як показано на фіг. 7. За умови, що відстань до ока d також є сталою, залежності значень фокусних відстаней вказаних лінз повинні бути такими, щоб положення точок Е1, … Еi, … Еn входу пучків в око були незмінними. На фіг. 8 наведено приклад таких залежностей для діапазону виправлення оптичної сили ока від -10 до +10 діоптрій. При використанні комерційно доступних лінз зі швидкодіючим електрично керованим фокусуванням EL-10-30 фірми Optotune (http://www.optotune. com/index. php?option=com_content&task=view&id=18&Itemid=37), що мають діапазон зміни фокусних відстаней від +20 мм до +60 мм та діаметр зіниці 6 мм, оптимізовані значення відстаней (f'36 + f37=const) та (d=const) дорівнюють 69,62 мм і 38,44 мм відповідно. При цьому для початкового етапу вимірювань обидві лінзи мають однакову оптичну силу (f36=f37=34,81 мм), виконується умова телескопічності без масштабування висоти променів та забезпечується їх паралельність до оптичної осі при заходженні в око. Око було змодельоване в параксіальному наближенні 6 UA 104398 C2 5 10 15 20 25 30 35 40 45 50 шляхом зміни його осьової довжини (Le, Lm і Lh, відповідно для еметропічного, міопічного і гіперметропічного ока). Для тих же початкових умов діапазону корекції аберацій і того ж типу електрично керованих рідинних лінз, але за необхідності вимірювання аберацій в апертурі ока до 8 мм, оптимізовані значення відстаней є такими: (f'36 + f37) = 65,34 мм, d=25 мм. При цьому в стані телескопічності лінзи відрізняються оптичною силою: f36 = 28,00 мм, а f37=37,34 мм. Ці приклади оптимізації не обмежують застосування рідинних лінз для оптичної системи спряження значеннями, розрахованими для певних типів рідинних лінз та певної конструкції пристрою. Фіг. 9 демонструє процес регулювання нахилу зондуючого пучка від гіперметропічного стану А через стадії В і С до стану спряження D з проекціями зондуючого пучка послідовно в точках Rh, Rh1, Rhi, Rh0. Відповідні точкові діаграми на сітківці показані на фіг. 10, де А - початкова точкова діаграма на сітківці для гіперметропічного ока, В і С - проміжні стани, a D - точкова діаграма на сітківці повністю спряженої оптичної системи лінз 36-37. Чим менші розміри точкової діаграми на сітківці, тим ближчою до спряження є оптична система 5 та тим менші похибки будуть вноситись оптичною системою ока на зворотному шляху від сітківки до позиційно чутливого детектора як складової частини аберометра. Фіг. 11, 12 і 13 ілюструють випадки повного спряження світлочутливої площини позиційно чутливого детектора 32 та сітківки ока 6. Фіг. 11 представляє еметропічний стан, фіг. 12 відповідає міопічному оку, а фіг. 13 - гіперметропічному. Вимірювання аберацій хвильового фронту за допомогою пристрою, що пропонується, можна здійснити за кількома алгоритмами. Один з алгоритмів може буде таким. Аберації хвильового фронту вимірюються в еметропічному положенні рідинних лінз 36 і 37, тобто пучок входить в оптичну систему спряження 5 паралельно до оптичної осі та виходить з неї також паралельним пучком. Блок обробки інформації 34 обчислює абераційні похибки для кожної точки Еi в апертурі ока 6 та визначає параметри сигналів, які мають бути прикладені до рідинних лінз 36 і 37, щоб довести лазерний пучок в кожну точку Еi нахиленим для компенсації виміряної похибки. Потім ці розраховані сигнали прикладаються до рідинних лінз 36 і 37 послідовно для всіх точок зондування та вимірюються нові значення похибок хвильового фронту в тих же точках Еi. Щоб отримати нульову похибку в кожній точці Еi, може знадобитися декілька ітерацій вимірювань. Недоліком цього підходу є тривалість процедури: при перемиканні оптичної системи спряження 5 з одного значення корекції похибок в інше тривалістю 10 мс потрібно буде 0,63…2,55 секунди для перемикання всіх 64…256 положень. Загальний час вимірювань буде ще більшим, адже вимірювання в кожній точці потребують ще деякого часу на утримання пучка в заданому положенні (від 1 мс до 10 мс для кожної точки). Для зменшення часу на перемикання оптичної системи спряження 5 потрібно зменшити кількість перемикань. Ця альтернатива може мати таку послідовність операцій: після вимірювання аберації хвильового фронту в еметропічному положенні оптичної системи спряження 5 і розрахунку абераційних похибок для кожної точки £, блок обробки інформації 34 визначає діапазон похибок, розділяє їх на декілька груп та передає ці дані в блок управління 33 для зондування кожної групи з певними значеннями спряження, що здійснюються оптичною системою спряження 5. Припустимо, що виміряні значення похибок хвильового фронту знаходяться в межах dmin-dmax. Поділимо цей діапазон на n піддіапазонів: (dmin … dmax)/n=d. Певні точки Ei будуть потрапляти у піддіапазон [dmin … (dmin+d)], інші - в під діапазон [(dmin+d) … (dmin+2d)], і так далі. Для всіх точок, в яких похибки знаходяться в j-му піддіапазоні [(dmin+jd) … (dmin + (j+1)d)], блок управління 33 буде забезпечувати значення управляючого сигналу для рідинних лінз 36 і 37, що відповідатиме значенню спряження [(dmin+jd) + (dmin + (j+1)d)]/2. Використовуючи такий алгоритм, можна зменшити загальний час на перемикання оптичної системи спряження 5. Наприклад, з тим же часом 10 мс на перемикання з одного значення корекції похибок до іншого, потрібно буде додати лише 50 мс для перемикання рідинних лінз 36 і 37 в 6 різних станів. Функціонування запропонованого пристрою не обмежується описаними алгоритмами. Алгоритми можуть бути модифіковані в залежності від необхідної точності та можуть бути змінені у випадку використання більш швидкодіючих рідинних лінз. 55 ФОРМУЛА ВИНАХОДУ 60 Пристрій для вимірювання аберацій хвильового фронту, що має канал позиціонування і акомодації, канал зондування, приймальний канал та канал управління і обробки інформації, причому канал позиціонування і акомодації складається з світлоподільника, об'єктива, 7 UA 104398 C2 5 10 15 20 відеокамери, ближньої марки, лінзи, рухомої уздовж оптичної осі, віддаленої марки та джерел світла для освітлення ближньої марки, віддаленої марки та ока, канал зондування складається з послідовно встановлених лазера, блока сканування та колімуючої лінзи, причому блок сканування складається з послідовно встановлених х-дефлектора, електрично зв'язаного з драйвером х-дефлектора, та у-дефлектора, електрично зв'язаного з драйвером y-дефлектора, причому колімуюча лінза має точку переднього фокуса, що збігається з еквівалентним центром сканування блока сканування, приймальний канал складається з послідовно встановлених поляризаційного фільтра, апертурної діафрагми, об'єктива і позиційно-чутливого детектора, канал управління і обробки інформації складається з блока управління, блока обробки інформації і дисплея, причому блок управління сполучено електричним зв'язком з блоком обробки інформації і дисплеєм, вихід блока обробки інформації сполучено з дисплеєм, канал управління і обробки інформації сполучено з каналом зондування, каналом позиціонування і акомодації та приймальним каналом, канал позиціонування і акомодації, канал зондування і приймальний канал оптично пов'язані через світлоподільники, який відрізняється тим, що між колімуючою лінзою і оком в ділянці оптичного шляху, спільній для каналу зондування та приймального каналу, встановлена оптична система спряження, яка складається з першої електрично керованої рідинної лінзи і другої електрично керованої рідинної лінзи з фіксованою відстанню між ними, причому кожна з електрично керованих рідинних лінз сполучена з каналом управління і обробки інформації, якому надано функцію розрахунку поправки на їх оптичну силу та вироблення сигналів управління ними так, щоб нахилом лазерного променя в кожній точці зондування зіниці ока лазерний промінь був спрямований до перерізу з зоровою віссю ока в площині сітківки. 8 UA 104398 C2 9 UA 104398 C2 10 UA 104398 C2 Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Автори англійськоюMolebnyi Vasyl Vasyliovych, Sokurenko Viacheslav Mykhailovych
Автори російськоюМолебный Василий Васильевич, Сокуренко Вячеслав Михайлович
МПК / Мітки
МПК: A61B 3/103, A61F 9/00, A61B 3/10, G01N 21/00
Мітки: фронту, пристрій, вимірювання, хвильового, аберацій
Код посилання
<a href="https://ua.patents.su/13-104398-pristrijj-dlya-vimiryuvannya-aberacijj-khvilovogo-frontu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання аберацій хвильового фронту</a>
Пристрій для вимірювання рефракційних аберацій ока
Номер патенту: 66936
Опубліковано: 15.06.2004
Автори: Ластер Ламар Фредерік (молодший), Молебний Василь Васильович, Колєнов Сергій Олександрович, Ільченко Леонід Миколайович, Смірнов Євгеній Миколайович
МПК: A61B 3/14, A61B 3/10, A61B 3/00
Мітки: аберацій, пристрій, рефракційних, ока, вимірювання
Формула / Реферат:
1. Пристрій для вимірювання рефракційних аберацій ока, що має в своєму складі канал зондування, вимірювальний канал та канал нормування, причому канал зондування складається з послідовно встановлених: лазера, першого та другого дифракційних однокоординатних дефлекторів, селектора першого порядку дифракції та колімаційної лінзи, причому селектор першого порядку дифракції виконано у вигляді телескопа за схемою Кеплера з апертурною діафрагмою,...
Спосіб визначення локальних нахилів хвильового фронту в сенсорі шека-гартмана з голографічною пам’яттю
Номер патенту: 37662
Опубліковано: 10.12.2008
Автори: Котов Михайло Миколайович, Поданчук Дмитро Васильович, Данько Володимир Петрович, Сутягіна Наталія Сергіївна
МПК: G01B 9/00
Мітки: фронту, пам'яттю, сенсорі, спосіб, локальних, шека-гартмана, хвильового, визначення, голографічною, нахилів
Формула / Реферат:
1. Спосіб визначення локальних нахилів хвильового фронту в сенсорі Шека-Гартмана з голографічною пам'яттю, що включає реєстрацію на фоточутливому матеріалі голографічної матриці мікролінз за допомогою опорного пучка, який формують шляхом оптичного перенесення в площину фоточутливого матеріалу еталонного растра мікролінз, та об'єктного пучка з початковим станом аберацій, який утворюють шляхом взаємодії монохроматичного когерентного пучка з...
Спосіб вимірювання хвильових аберацій ока та пристрій для його здійснення (варіанти)
Номер патенту: 59488
Опубліковано: 15.09.2003
Автор: Молебний Василь Васильович
МПК: A61B 3/00, A61B 3/14, A61B 3/10
Мітки: пристрій, вимірювання, ока, хвильових, здійснення, спосіб, аберацій, варіанти
Формула / Реферат:
1. Спосіб вимірювання хвильових аберацій ока, оснований на зондуванні ока вузьким пучком лазерного випромінювання, виділенні розсіяної сітківкою компоненти з випромінювання, що повертається з ока, розділенні її на субапертури за допомогою матриці співвісних лінз, вимірюванні нахилу хвильового фронту в кожній субапертурі шляхом визначення відхилення положення фокальної плями від оптичної осі лінзи, реконструкції хвильового фронту за виміряними...
Спосіб поляризаційного обертання хвильового фронту світлової хвилі
Номер патенту: 3200
Опубліковано: 26.12.1994
Автори: Лапаєва Світлана Миколаївна, Воляр Олександр Володимирович, Одулов Сергій Георгійович, Кухтарев Микола Васильович
МПК: G01J 4/00
Мітки: світлової, хвильового, поляризаційного, обертання, фронту, хвилі, спосіб
Формула / Реферат:
1. Способ поляризационного обращения волнового фронта световой волны, включающий направление на фоторефрактивный кристалл объектной и опорной волн и их перекрещивание, отличающийся тем, что ось кристалла из LINbO3 ориентируют перпендикулярно плоскости регистрации объективной и опорной волн и направляют на кристалл считывающую волну.2. Способ по п. 1, отличающийся тем, что опорную и считывающую волны линейно поляризуют под углом ±45°и...
Спосіб поляризаційного обертання хвильового фронту електромагнітного поля
Номер патенту: 3201
Опубліковано: 26.12.1994
Автори: Кухтарев Микола Васильович, Воляр Олександр Володимирович
Мітки: хвильового, фронту, поля, обертання, спосіб, електромагнітного, поляризаційного
Формула / Реферат:
Способ поляризационного обращения волнового фронта электромагнитного поля, включающий направление предметной и первой опорной волн на фоторефрактивный кристалл, запись динамической голограммы и ее считывание с помощью пучка, сопряженного опорному, отличающийся тем, что на фоторефрактивный кристалл направляют второй опорный пучок, плоскость поляризации которого ортогональна плоскости поляризации первой опорной волны, при этом углы падения и...
Попередній патент: Швидкодіючий рейтрейсинговий просторово роздільний рефрактометр
Наступний патент: Термоструменевий коагулятор та спосіб виконання хірургічних операцій з лікування пухлин та метастазів живих біотканин із його застосуванням
Випадковий патент: Спосіб дослідження периферійних меж поля зору