Машина для будівельних робіт
Формула / Реферат
1. Машина для будівельних робіт, що містить:
- опорну раму,
- встановлену на опорній рамі щоглу та
- канатну лебідку (10) з обертовим канатним барабаном (14) для приймання каната (50),
причому
канатна лебідка (10) оснащена намотувальним пристроєм (20), що містить:
- вхідний канатний шків (34) для напрямлення каната (50),
- виконану з можливістю переміщення вздовж осі обертання канатного барабана (14) напрямну каретку (30), на якій встановлений вхідний канатний шків (34), та
- канатне гальмо (40) для забезпечення натягу каната (50) в зоні його підведення до канатного барабана (14),
яка відрізняється тим, що містить:
- вимірювальний пристрій, здатний визначати миттєве навантаження на канат (50), і
- керувальний пристрій (70), здатний автоматично керувати канатним гальмом (40) і активізувати канатне гальмо (40) у разі зменшення миттєвого навантаження на канат (50) нижче граничного значення.
2. Машина для будівельних робіт за пунктом 1, яка відрізняється тим, що канатне гальмо (40) містить гальмівний пристрій (42) для гальмування канатного шківа (44), через який пропущений канат (50).
3. Машина для будівельних робіт за пунктом 2, яка відрізняється тим, що канатне гальмо (40) містить виконавчий гідроциліндр (46) для приведення в дію гальмівного пристрою (42).
4. Машина для будівельних робіт за будь-яким із пунктів 1-3, яка відрізняється тим, що керувальний пристрій (70) виконаний з можливістю регулювання гальмівного зусилля канатного гальма (40).
5. Машина для будівельних робіт за пунктом 4, яка відрізняється тим, що керувальний пристрій (70) містить лічильний пристрій для визначення кількості обертів канатного барабана (14).
6. Машина для будівельних робіт за пунктом 4 або 5, яка відрізняється тим, що керувальний пристрій (70) виконаний з можливістю керування канатним гальмом (40) залежно від кількості визначених обертів канатного барабана (14).
7. Машина для будівельних робіт за будь-яким із пунктів 1-6, яка відрізняється тим, що намотувальний пристрій (20) містить виконавчий гідроциліндр (28) для переміщення напрямної каретки (30).
8. Машина для будівельних робіт за будь-яким із пунктів 1-7, яка відрізняється тим, що містить сенсорний пристрій (60), що має принаймні одну сенсорну площадку (62), виконаний з можливістю визначення положення каната (50) в поздовжньому напрямку канатного барабана (14),
а також тим, що керувальний пристрій (70) виконаний зі здатністю керування переміщенням напрямної каретки (30) залежно від сигналу сенсорного пристрою (60).
9. Машина для будівельних робіт за будь-яким із пунктів 1-8, яка відрізняється тим, що контактний пристрій (60) має принаймні одну виконану з можливістю контактування з канатом (50) контактну площадку (62),
а також тим, що керувальний пристрій (70) виконаний з можливістю керування переміщенням напрямної каретки (30) залежно від контактування принаймні однієї контактної площадки (62) з канатом (50).
10. Машина для будівельних робіт за пунктом 8 або 9, яка відрізняється тим, що керувальний пристрій (70) виконаний з можливістю формування вихідного сигналу для безперервного переміщення напрямної каретки (30).
11. Машина для будівельних робіт за пунктом 9 або 10, яка відрізняється тим, що принаймні одна контактна площадка (62) розміщена в зоні підведення каната (50) до канатного барабана (14).
12. Машина для будівельних робіт за будь-яким із пунктів 9-11, яка відрізняється тим, що принаймні одна контактна площадка (62) встановлена на напрямній каретці (30) з можливістю переміщення разом із напрямною кареткою (30).
13. Машина для будівельних робіт за пунктом 12, яка відрізняється тим, що принаймні одна контактна площадка (62) встановлена з можливістю переміщення на напрямній каретці (30).
14. Машина для будівельних робіт за будь-яким із пунктів 9-13, яка відрізняється тим, що встановлено дві контактних площадки (62), причому перша контактна площадка (62) виконана з можливістю забезпечення керування переміщенням напрямної каретки (30) в одному напрямку, а друга контактна площадка (62) виконана з можливістю забезпечення керування переміщенням напрямної каретки (309) в іншому напрямку.
15. Машина для будівельних робіт за пунктом 14, яка відрізняється тим, що передбачений упор (26) для напрямної каретки (30), який встановлений таким чином, що канат (50) досягає аксіального обмежувального елемента канатного барабана (14), коли напрямна каретка (30) дотикається упора (26), і при намотуванні наступного витка для зміни напрямку переміщення напрямної каретки (30) дотикається другої контактної площадки (62).
Текст
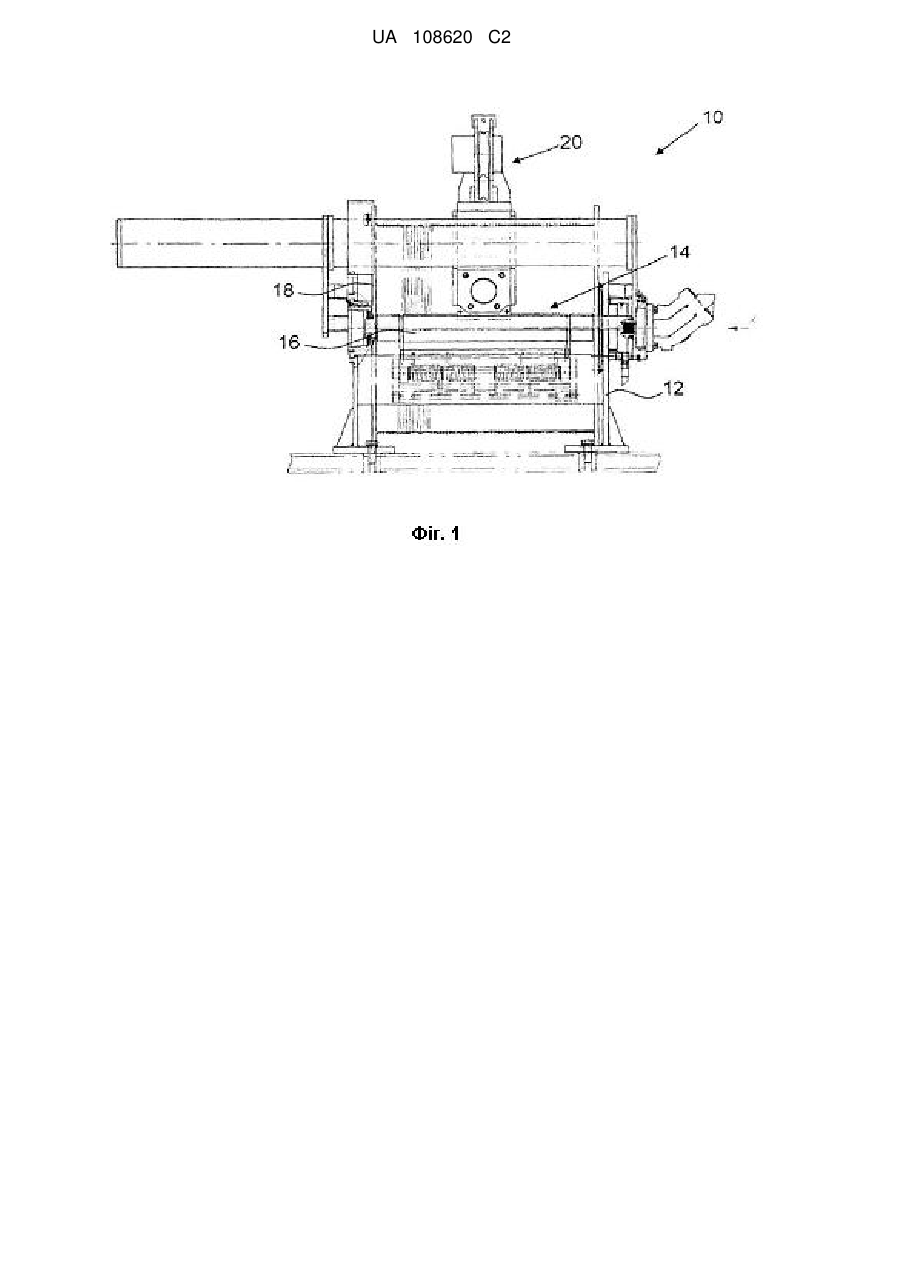
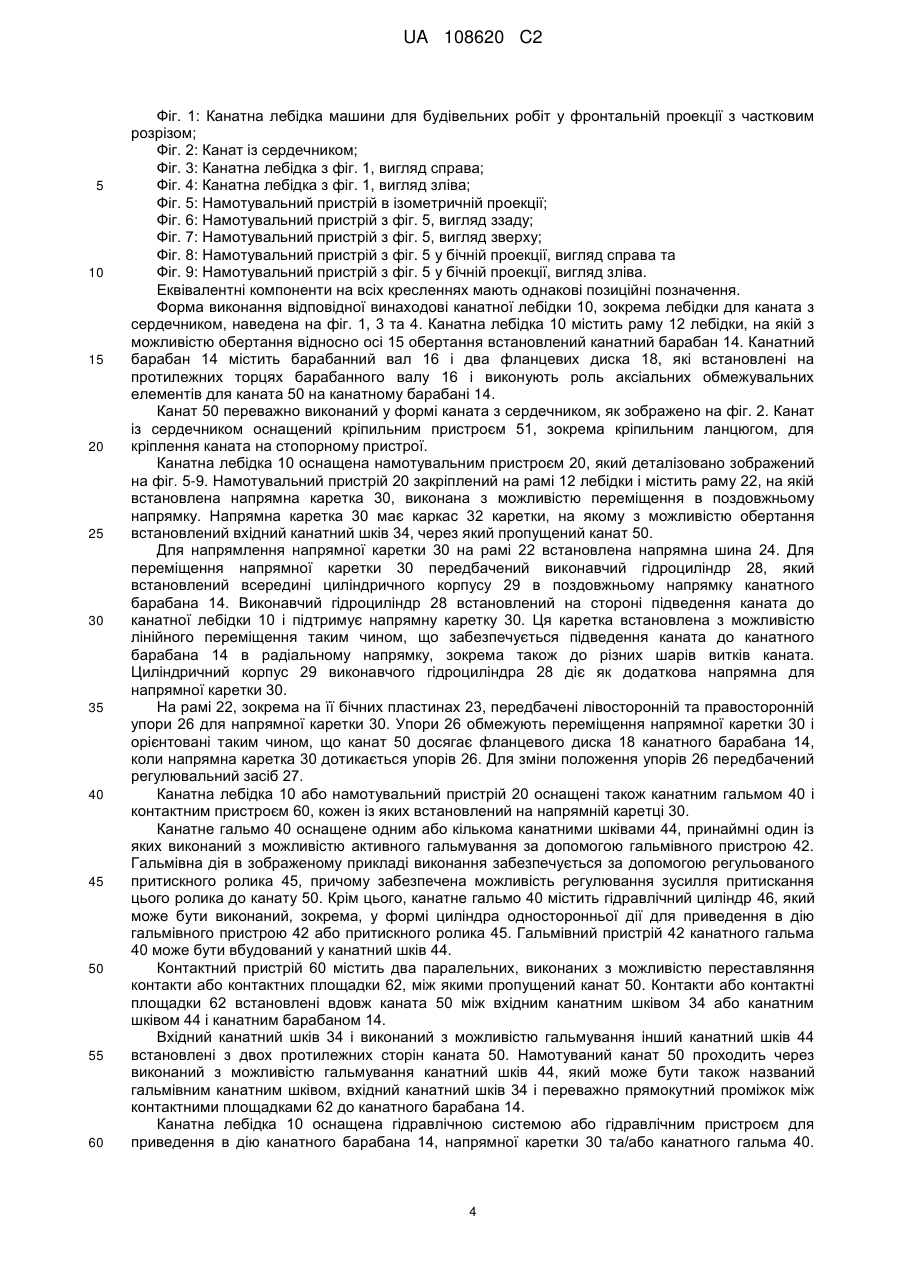
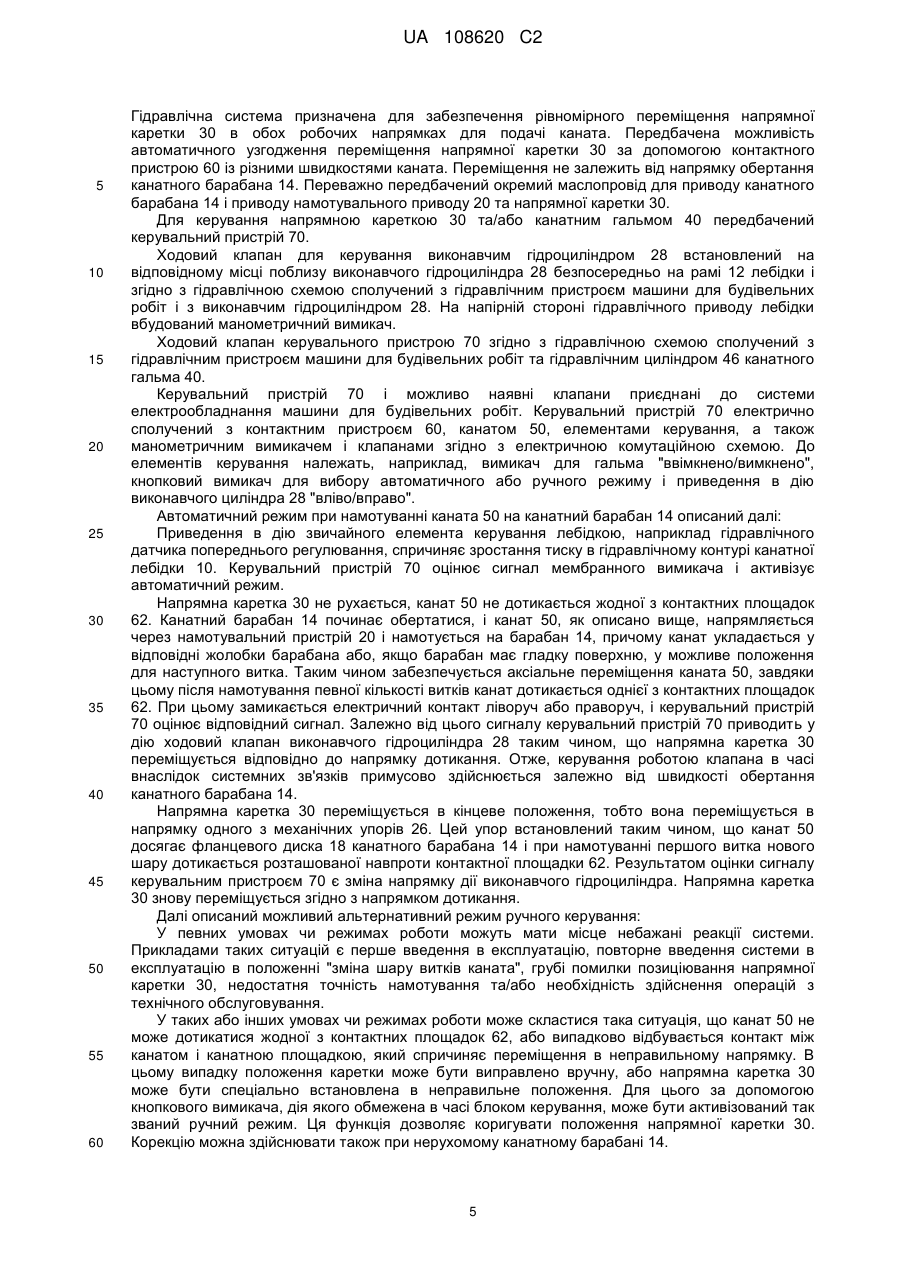
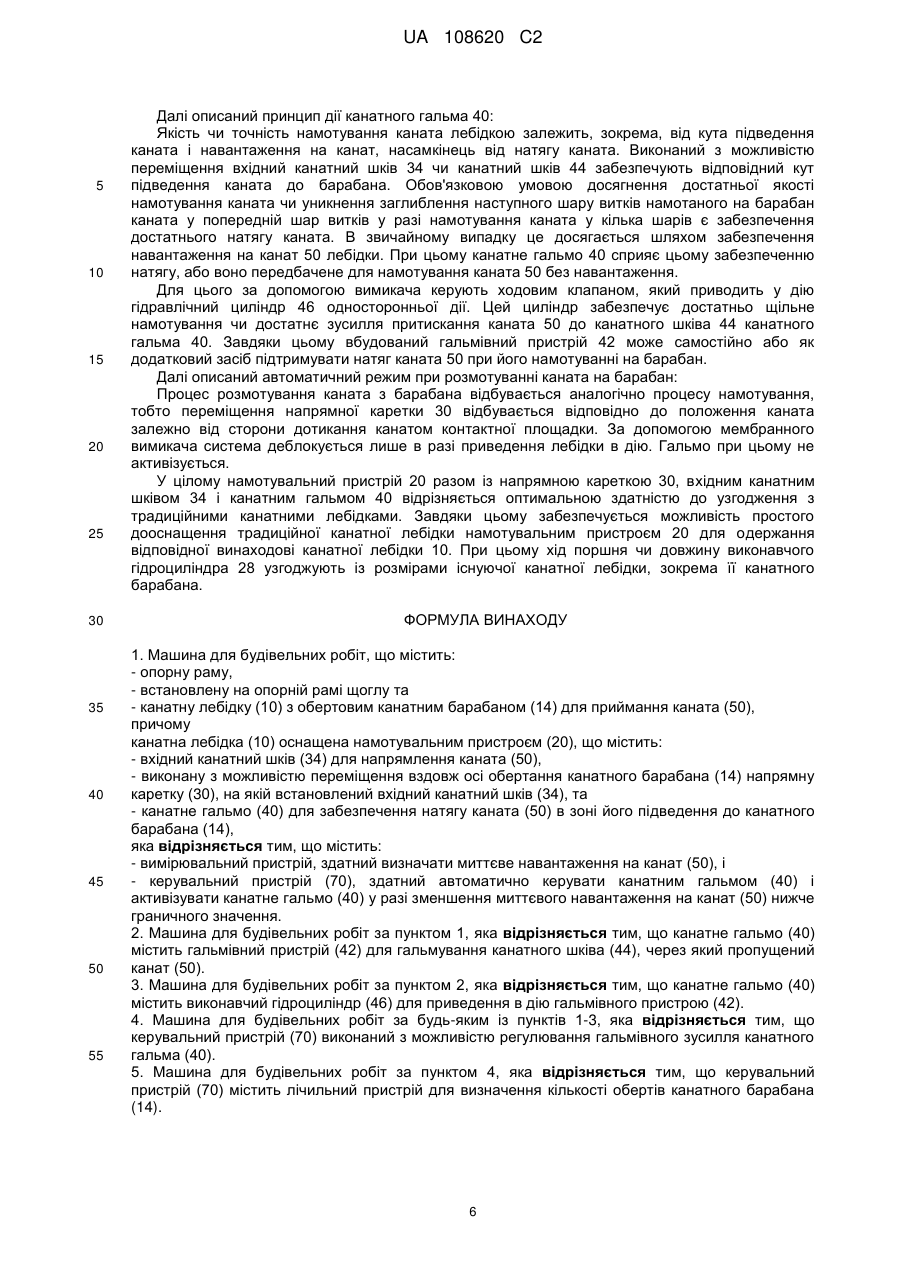
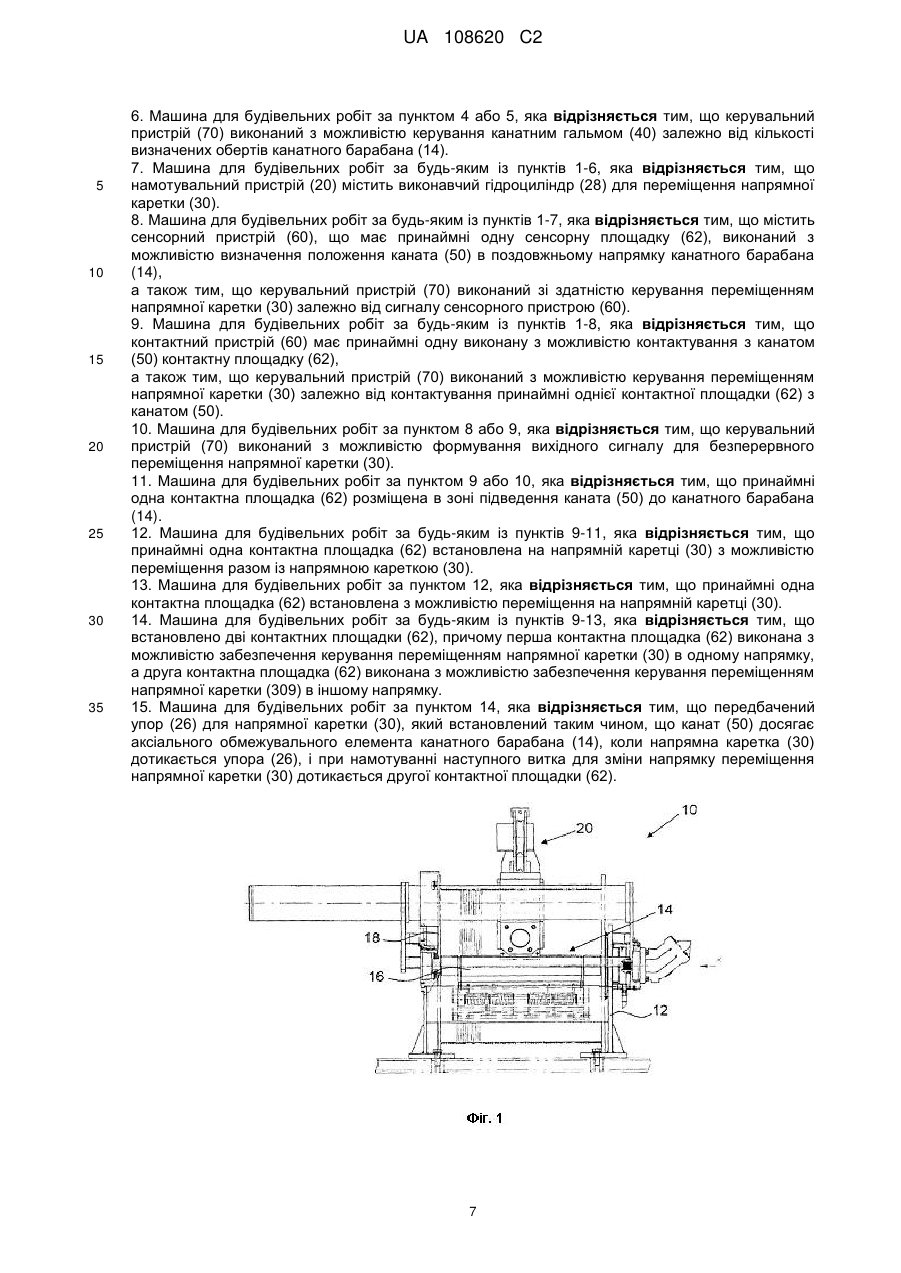
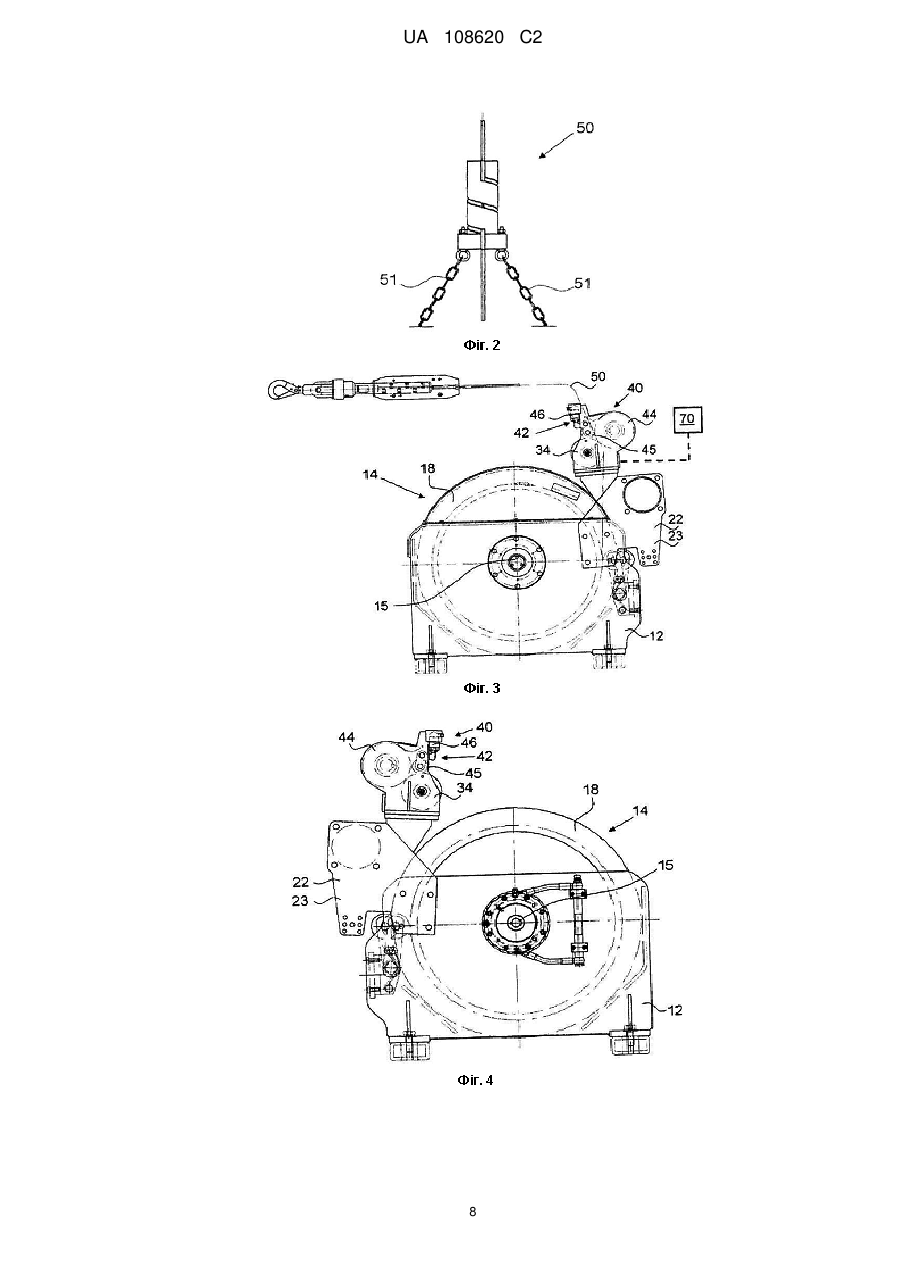
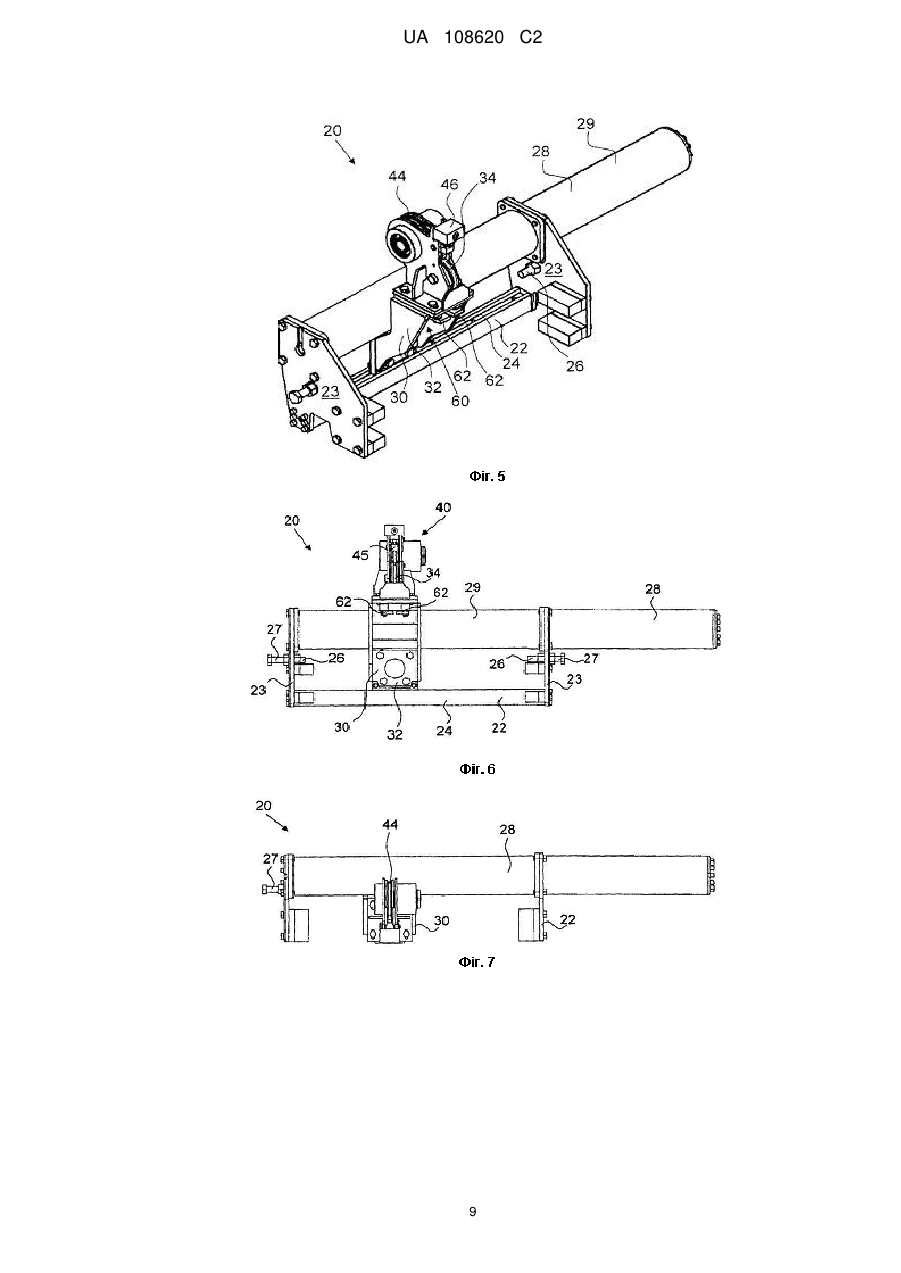
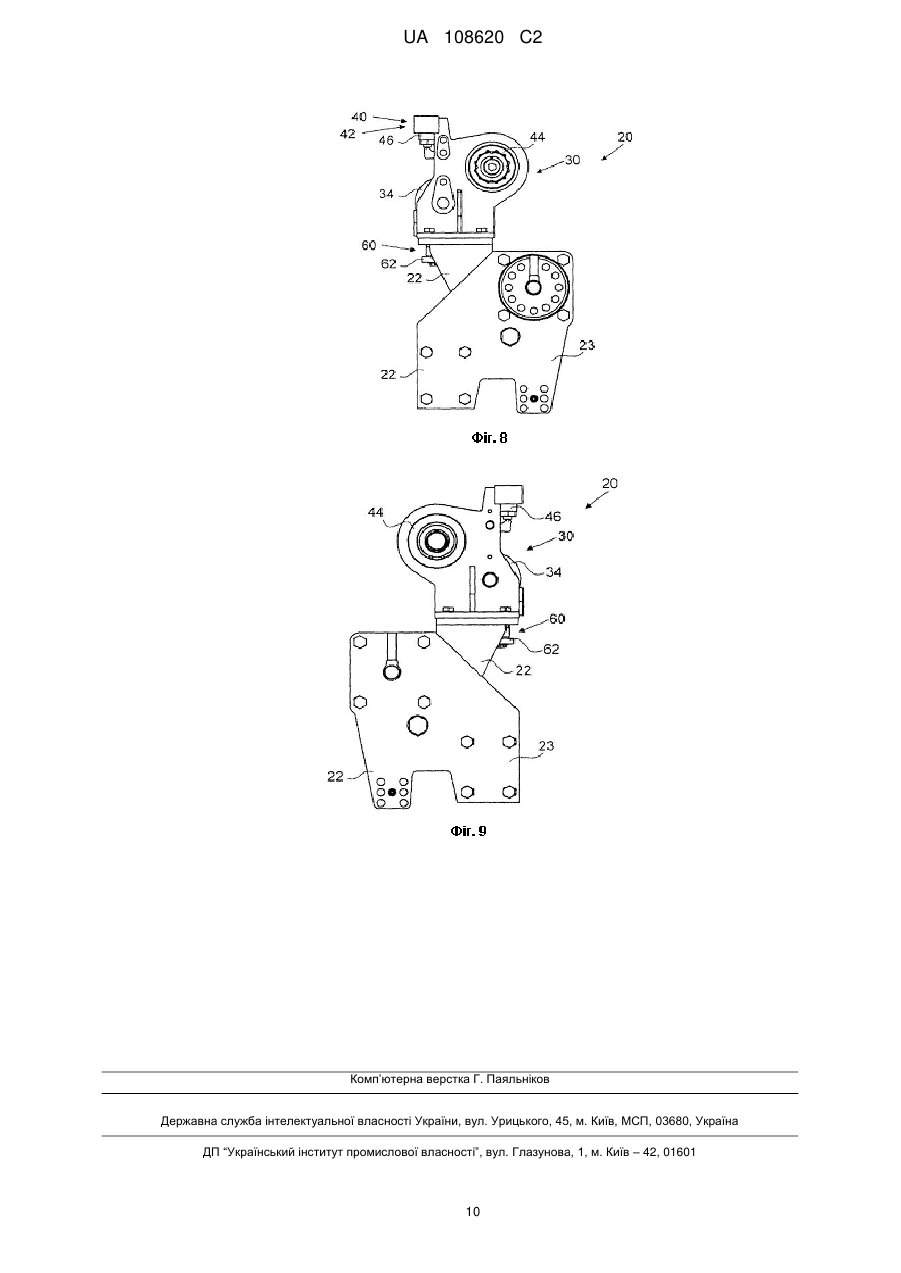
Реферат: Машина для будівельних робіт містить опорну раму, встановлену на опорній рамі щоглу та канатну лебідку (10) з обертовим канатним барабаном (14) для приймання каната (50), канатна лебідка (10) оснащена намотувальним пристроєм (20), що містить вхідний канатний шків (34) для напрямлення каната (50), виконану з можливістю переміщення вздовж осі обертання канатного барабана (14) напрямну каретку (30), на якій встановлений вхідний канатний шків (34), а також канатне гальмо (40) для забезпечення натягу каната (50) в зоні його підведення до канатного барабана (14). Для покращення намотування каната й зниження його зносу машина містить вимірювальний пристрій, здатний визначати миттєве навантаження на канат (50), керувальний пристрій (70), здатний автоматично керувати канатним гальмом (40) і активізувати канатне гальмо (40) у разі зменшення миттєвого навантаження на канат (50) нижче граничного значення. UA 108620 C2 (12) UA 108620 C2 UA 108620 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується машини для будівельних робіт, що має опорну раму, встановлену на опорній рамі щоглу і канатну лебідку з обертовим канатним барабаном для приймання каната, згідно з обмежувальною частиною пункту 1 формули винаходу. Машиною для будівельних робіт може бути, зокрема, бурильна машина для виконання свердловин у ґрунті. Такі свердловини є необхідними, наприклад, для спорудження колодязів, поліпшення властивостей ґрунту або виготовлення буронабивних паль і протифільтраційних стін у ґрунті. На щоглі може бути розміщена каретка, на якій встановлюють буровий привід для надання обертального руху колоні бурильних труб. Канат такої машини для будівельних робіт може виконувати різні функції. Наприклад, це може бути несучий канат, який пропущений через головку щогли і на якому підвішена колона бурильних труб або буровий інструмент. Також канат може бути передбачений для підвішування допоміжних пристроїв, наприклад пристрою для від'єднання елементів колони бурильних труб. Канатну лебідку з канатним барабаном встановлюють переважно на опорну раму або шасі машини для будівельних робіт. Шляхом обертання канатного барабана канат можна намотувати на барабан чи розмотувати з барабана. Машина для будівельних робіт, оснащена канатною лебідкою, описана, наприклад, у публікаціях ЕР 1 862 636 А1 або ЕР 103 43 079 В3. Із публікації JP 2002/087763 А відома канатна лебідка з намотувальним пристроєм, в якому положення підведення каната до канатного барабана може регулюватися. Для цього намотувальний пристрій містить напрямну каретку, положення якої може змінюватися в залежності від кількості витків каната на шківу. Інший намотувальний пристрій відомий із публікації JP 8301580 А1. Для керування напрямною каретною визначається положення каната на барабані. Із публікації US 2004/069981 А1 відома будівельна машина з намотувальним пристроєм, що містить два натяжні шківи, що служать канатним гальмом. Тиск між ними може бути змінений. Інша канатна лебідка з намотувальним пристроєм відома із публікації US 6,811,112 В1. В основу винаходу було поставлено задачу розроблення машини для будівельних робіт, оснащеної канатною лебідкою, яка забезпечує високу якість намотування і низький знос каната також при невеликому навантаженні на канат. Згідно з винаходом, задачу вирішено у машині для будівельних робіт з ознаками пункту 1 формули винаходу. Переважні форми виконання винаходу наведені у залежних пунктах формули винаходу, а також в описі та на ілюстраціях. Відповідна винаходові машина для будівельних робіт відрізняється тим, що канатна лебідка оснащена намотувальним пристроєм, який містить вхідний канатний шків для напрямлення каната, виконану з можливістю переміщення вздовж осі обертання канатного барабана напрямну каретку, на якій встановлений вхідний канатний шків, і канатне гальмо для забезпечення натягу каната в зоні його підведення до канатного барабана. У машині для будівельних робіт описаного типу розмотана з канатної лебідки частина каната в звичайному випадку не звисає вільно, а пропущена через нерухому напрямну для каната, встановлену, наприклад, на головці щогли машини для будівельних робіт. Перша основна ідея винаходу полягає в тому, що додатково до встановленої в разі необхідності нерухомо напрямної для каната передбачений намотувальний пристрій для каната, за допомогою якого можна регулювати кут підведення каната до канатного барабана. Для встановлення заданого кута підведення каната передбачений виконаний з можливістю переміщення вздовж поздовжньої осі канатного барабана канатний шків, який напрямляє канат при намотуванні та/або розмотуванні в поздовжньому напрямку канатного барабана і таким чином незалежно від аксіального положення каната забезпечує в основному радіальне підведення каната до канатного барабана. Вхідний канатний шків, згідно з винаходом, встановлений на виконаній з можливістю переміщення в поздовжньому напрямку канатного барабана напрямній каретці. Таким чином, забезпечується можливість регулювання чи зміни кута підведення каната шляхом переставляння або переміщення напрямної каретки. Вхідний канатний шків, через який пропущений канат, і який може бути названий також напрямним шківом, може бути встановлений із можливістю обертання на напрямній каретці. Інша головна ідея винаходу полягає в поліпшенні якості намотування каната на барабан за рахунок того, що канат, зокрема при намотуванні на барабан, гальмується перед досягненням канатного барабана, завдяки чому забезпечується натягнення каната в зоні підведення до канатного барабана. За допомогою передбаченого канатного гальма може бути забезпечений достатній натяг каната при намотуванні на барабан навіть у разі відсутності навантаження на 1 UA 108620 C2 5 10 15 20 25 30 35 40 45 50 55 60 канат. Цей натяг каната забезпечує рівне, акуратне намотування каната на барабан. В цілому таким чином досягається висока якість намотування каната і завдяки цьому зменшується знос каната. Особливо висока якість намотування каната досягається за рахунок того, що канатне гальмо встановлене на виконаній з можливістю переміщення напрямній каретці і також виконане з можливістю переміщення в поздовжньому напрямку канатного барабана. У переважній формі виконання винаходу канатне гальмо містить гальмівний пристрій для канатного шківа, через який пропущений канат. Канатне гальмо може містити, наприклад, діючий на канат притискний ролик та/або гальмівні накладки, які діють на канатний шків. Канатним шківом може бути, зокрема, вхідний канатний шків намотувального пристрою. Проте, в іншому варіанті додатково до вхідного канатного шківа може бути передбачений також виконаний з можливістю активного гальмування інший канатний шків. Переважно канатне гальмо містить принаймні два канатних шківи, між якими пропущений канат. В іншій переважній формі виконання винаходу передбачено, що канатне гальмо оснащене виконавчим гідроциліндром для приведення в дію гальмівного пристрою, зокрема притискного ролика. Як виконавчий гідроциліндр може бути застосований, зокрема, циліндр односторонньої дії. Окрім цього, переважним є варіант, в якому для автоматичного керування канатним гальмом передбачений керувальний пристрій, який може бути також названий керувальним пристроєм канатного гальма. Конструкція керувального пристрою переважно призначена для регулювання гальмівної дії, зокрема гальмівного зусилля, канатного гальма. Збільшення або зменшення гальмівної дії при цьому відбувається переважно залежно від режиму роботи, зокрема натягу канату. Вимірювальний пристрій дозволяє визначати миттєве навантаження на канат, причому забезпечується активізація канатного гальма, якщо навантаження на канат виявляється нижчим, ніж граничне значення. Переважно керувальний пристрій містить лічильний пристрій або механізм для визначення кількості обертів канатного барабана. Керувальний пристрій може бути відповідно оснащений для регулювання гальмівної дії канатного гальма залежно від визначеної кількості обертів канатного барабана. Якщо відома, наприклад, довжина каната, за підрахованою кількістю обертів можна визначити, яка довжина каната ще залишається вільною, тобто не намотаною на барабан. Якщо ця довжина виявляється меншою, ніж задане значення, може бути активізоване канатне гальмо або збільшена гальмівна дія канатного гальма для підтримання достатнього натягу каната. Відповідно до цього вибирають переважно таку конструкцію керувального пристрою, яка забезпечує можливість керування канатним гальмом залежно від підрахованої кількості обертів канатного барабана. В іншій переважній формі виконання винаходу намотувальний пристрій для переміщення напрямної каретки оснащений виконавчим циліндром. Виконавчий циліндр переважно виконують у формі циліндра двосторонньої дії, а також переважно гідравлічного (гідро-) циліндра. Виконавчий гідроциліндр може мати циліндричний корпус, який виконує роль напрямної для каретки. Для забезпечення високої якості автоматичного намотування передбачений сенсорний пристрій, виконаний з можливістю детектування положення каната в поздовжньому напрямку канатного барабана, та керувальний пристрій для керування переміщенням напрямної каретки залежно від сигналу сенсорного пристрою. Цей керувальний пристрій може бути також названий керувальним пристроєм напрямної каретки і в разі необхідності об'єднаний в єдиний блок із керувальним пристроєм канатного гальма. При намотуванні на канатний барабан напрямлення каната забезпечується за рахунок виконання попереднього витка або за допомогою виконаних на канатному барабані жолобків. В результаті відбувається аксіальне переміщення каната, яке реєструється сенсорним пристроєм. Відповідно до цього виявленого аксіального переміщення каната керувальний пристрій керує аксіальним переміщенням напрямної каретки, в результаті чого напрямна каретка автоматично слідує за аксіальним переміщенням каната. Таким чином, напрямок і швидкість переміщення напрямної каретки визначаються аксіальним переміщенням каната. Завдяки цьому забезпечується можливість автоматичного напрямлення каната незалежно від його діаметра і швидкості обертання канатного барабана. У переважному варіанті сенсорний пристрій виконаний у формі контактного пристрою. Особливо переважним є те, що в контактному пристрої передбачена принаймні одна виконана з можливістю контактування з канатом контактна площадка, а також тим, що передбачений керувальний пристрій для керування переміщенням напрямної каретки залежно від дотикання каната принаймні до однієї контактної площадки. Отже, забезпечена можливість керування 2 UA 108620 C2 5 10 15 20 25 30 35 40 45 50 55 60 напрямною кареткою залежно від дотикання контактної площадки. Коли канат дотикається контактної площадки в результаті свого аксіального переміщення, тобто зміни кута підведення каната до канатного барабана, ініціюється переміщення напрямної каретки чи напрямного ролика та їх підведення до каната відповідно до його аксіального переміщення. Таким чином процес намотування активізується в результаті дотикання. Переміщення напрямної каретки в принципі може відбуватися поступово. Проте, для забезпечення рівномірного переміщення напрямної каретки попри періодичне залежно від конкретних обставин дотикання каната до контактної площадки, переважним є таке виконання керувального пристрою, яке забезпечує генерування вихідного сигналу для постійного або безперервного переміщення контактної каретки. Отже, вхідним сигналом керувального пристрою може бути дискретний або імпульсний сигнал контактного пристрою. Для кращого напрямлення каната цей сигнал перетворюють на безперервний сигнал переміщення як вихідний сигнал. Переважно принаймні одна контактна площадка передбачена в зоні підведення каната до канатного барабана, зокрема між вхідним канатним шківом і канатним барабаном. Таким чином, при намотуванні канат спочатку проходить через вхідний канатний шків і в разі необхідності через виконаний з можливістю активного гальмування інший канатний шків, а потім напрямляється далі вздовж контактної площадки до канатного барабана. Окрім цього, переважним є варіант, в якому принаймні одна контактна площадка виконана з можливістю переміщення в поздовжньому напрямку канатного барабана. Для цього контактну площадку, переважно нерухомо, встановлюють на напрямній каретці з можливістю переміщення разом із напрямної кареткою. Зокрема, може бути передбачено, щоб контактна площадка була встановлена на напрямній каретці в незмінному положенні відносно вхідного канатного шківа, завдяки чому забезпечується певна відстань між вхідним канатним шківом і контактною площадкою. Зокрема, для узгодження з різними діаметрами канатів та/або для регулювання чутливості автоматичного супроводження вхідного канатного шківа переважним є виконання контактної площадки з можливістю зміни або регулювання її положення на напрямній каретці. Це слід розуміти, зокрема, таким чином, що передбачена можливість зміни відстані між контактною площадкою і вхідним канатним шківом, зокрема в поздовжньому напрямку канатного барабана. Передбачена також можливість фіксації контактної площадки, встановленої в потрібне положення, після завершення регулювання, завдяки чому в процесі роботи пристрою вона не переміщується відносно вхідного канатного шківа. Зокрема, переважним є варіант, в якому контактна площадка виконана з можливістю зміни її положення відносно напрямного ролика в ручному режимі. Для переміщення напрямної каретки в двох напрямках при автоматичному супроводженні переважною є форма виконання, в якій передбачено дві контактних площадки, причому перша контактна площадка виконана з можливістю регулювання переміщення напрямної каретки в першому напрямку, а друга контактна площадка - з можливістю регулювання переміщення напрямної каретки в іншому напрямку. Канат проходить переважно через проміжок між обома контактними площадками. Переважно першу контактну площадку встановлюють в поздовжньому напрямку канатного барабана з однієї сторони каната, а другу контактну площадку - з іншої сторони каната. Обидві контактні площадки мають бути виконані з можливістю дотикання до них каната. Окрім цього, може бути передбачений перемикальний пристрій для перемикання напрямку переміщення напрямної каретки при досягненні канатом кінцевого положення на канатному барабані. Переважним для цього є варіант, в якому для напрямної каретки передбачений упор, який встановлюють таким чином, що канат досягає аксіального обмежувального елемента канатного барабана, зокрема фланцевого диска, якщо напрямна каретка дотикається упора, і при намотуванні наступного витка для зміни напрямку переміщення напрямної каретки на протилежне дотикається другої контактної площадки. Таким чином, для здійснення руху напрямної каретки вперед канат контактує з першою контактною площадкою, а для здійснення руху назад - з другою контактною площадкою. Зміна контактування з першої контактної площадки на другу контактну площадку спричиняє зміну напрямку переміщення напрямної каретки. Отже, напрямна каретка завжди слідує напрямку дотикання. Для узгодження з особливостями геометричних параметрів канатних лебідок контактні площадки виконують переважно з можливістю регулювання. Далі винахід пояснюється докладніше за допомогою доданих схематичних креслень. На них зображено: 3 UA 108620 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 1: Канатна лебідка машини для будівельних робіт у фронтальній проекції з частковим розрізом; Фіг. 2: Канат із сердечником; Фіг. 3: Канатна лебідка з фіг. 1, вигляд справа; Фіг. 4: Канатна лебідка з фіг. 1, вигляд зліва; Фіг. 5: Намотувальний пристрій в ізометричній проекції; Фіг. 6: Намотувальний пристрій з фіг. 5, вигляд ззаду; Фіг. 7: Намотувальний пристрій з фіг. 5, вигляд зверху; Фіг. 8: Намотувальний пристрій з фіг. 5 у бічній проекції, вигляд справа та Фіг. 9: Намотувальний пристрій з фіг. 5 у бічній проекції, вигляд зліва. Еквівалентні компоненти на всіх кресленнях мають однакові позиційні позначення. Форма виконання відповідної винаходові канатної лебідки 10, зокрема лебідки для каната з сердечником, наведена на фіг. 1, 3 та 4. Канатна лебідка 10 містить раму 12 лебідки, на якій з можливістю обертання відносно осі 15 обертання встановлений канатний барабан 14. Канатний барабан 14 містить барабанний вал 16 і два фланцевих диска 18, які встановлені на протилежних торцях барабанного валу 16 і виконують роль аксіальних обмежувальних елементів для каната 50 на канатному барабані 14. Канат 50 переважно виконаний у формі каната з сердечником, як зображено на фіг. 2. Канат із сердечником оснащений кріпильним пристроєм 51, зокрема кріпильним ланцюгом, для кріплення каната на стопорному пристрої. Канатна лебідка 10 оснащена намотувальним пристроєм 20, який деталізовано зображений на фіг. 5-9. Намотувальний пристрій 20 закріплений на рамі 12 лебідки і містить раму 22, на якій встановлена напрямна каретка 30, виконана з можливістю переміщення в поздовжньому напрямку. Напрямна каретка 30 має каркас 32 каретки, на якому з можливістю обертання встановлений вхідний канатний шків 34, через який пропущений канат 50. Для напрямлення напрямної каретки 30 на рамі 22 встановлена напрямна шина 24. Для переміщення напрямної каретки 30 передбачений виконавчий гідроциліндр 28, який встановлений всередині циліндричного корпусу 29 в поздовжньому напрямку канатного барабана 14. Виконавчий гідроциліндр 28 встановлений на стороні підведення каната до канатної лебідки 10 і підтримує напрямну каретку 30. Ця каретка встановлена з можливістю лінійного переміщення таким чином, що забезпечується підведення каната до канатного барабана 14 в радіальному напрямку, зокрема також до різних шарів витків каната. Циліндричний корпус 29 виконавчого гідроциліндра 28 діє як додаткова напрямна для напрямної каретки 30. На рамі 22, зокрема на її бічних пластинах 23, передбачені лівосторонній та правосторонній упори 26 для напрямної каретки 30. Упори 26 обмежують переміщення напрямної каретки 30 і орієнтовані таким чином, що канат 50 досягає фланцевого диска 18 канатного барабана 14, коли напрямна каретка 30 дотикається упорів 26. Для зміни положення упорів 26 передбачений регулювальний засіб 27. Канатна лебідка 10 або намотувальний пристрій 20 оснащені також канатним гальмом 40 і контактним пристроєм 60, кожен із яких встановлений на напрямній каретці 30. Канатне гальмо 40 оснащене одним або кількома канатними шківами 44, принаймні один із яких виконаний з можливістю активного гальмування за допомогою гальмівного пристрою 42. Гальмівна дія в зображеному прикладі виконання забезпечується за допомогою регульованого притискного ролика 45, причому забезпечена можливість регулювання зусилля притискання цього ролика до канату 50. Крім цього, канатне гальмо 40 містить гідравлічний циліндр 46, який може бути виконаний, зокрема, у формі циліндра односторонньої дії для приведення в дію гальмівного пристрою 42 або притискного ролика 45. Гальмівний пристрій 42 канатного гальма 40 може бути вбудований у канатний шків 44. Контактний пристрій 60 містить два паралельних, виконаних з можливістю переставляння контакти або контактних площадки 62, між якими пропущений канат 50. Контакти або контактні площадки 62 встановлені вдовж каната 50 між вхідним канатним шківом 34 або канатним шківом 44 і канатним барабаном 14. Вхідний канатний шків 34 і виконаний з можливістю гальмування інший канатний шків 44 встановлені з двох протилежних сторін каната 50. Намотуваний канат 50 проходить через виконаний з можливістю гальмування канатний шків 44, який може бути також названий гальмівним канатним шківом, вхідний канатний шків 34 і переважно прямокутний проміжок між контактними площадками 62 до канатного барабана 14. Канатна лебідка 10 оснащена гідравлічною системою або гідравлічним пристроєм для приведення в дію канатного барабана 14, напрямної каретки 30 та/або канатного гальма 40. 4 UA 108620 C2 5 10 15 20 25 30 35 40 45 50 55 60 Гідравлічна система призначена для забезпечення рівномірного переміщення напрямної каретки 30 в обох робочих напрямках для подачі каната. Передбачена можливість автоматичного узгодження переміщення напрямної каретки 30 за допомогою контактного пристрою 60 із різними швидкостями каната. Переміщення не залежить від напрямку обертання канатного барабана 14. Переважно передбачений окремий маслопровід для приводу канатного барабана 14 і приводу намотувального приводу 20 та напрямної каретки 30. Для керування напрямною кареткою 30 та/або канатним гальмом 40 передбачений керувальний пристрій 70. Ходовий клапан для керування виконавчим гідроциліндром 28 встановлений на відповідному місці поблизу виконавчого гідроциліндра 28 безпосередньо на рамі 12 лебідки і згідно з гідравлічною схемою сполучений з гідравлічним пристроєм машини для будівельних робіт і з виконавчим гідроциліндром 28. На напірній стороні гідравлічного приводу лебідки вбудований манометричний вимикач. Ходовий клапан керувального пристрою 70 згідно з гідравлічною схемою сполучений з гідравлічним пристроєм машини для будівельних робіт та гідравлічним циліндром 46 канатного гальма 40. Керувальний пристрій 70 і можливо наявні клапани приєднані до системи електрообладнання машини для будівельних робіт. Керувальний пристрій 70 електрично сполучений з контактним пристроєм 60, канатом 50, елементами керування, а також манометричним вимикачем і клапанами згідно з електричною комутаційною схемою. До елементів керування належать, наприклад, вимикач для гальма "ввімкнено/вимкнено", кнопковий вимикач для вибору автоматичного або ручного режиму і приведення в дію виконавчого циліндра 28 "вліво/вправо". Автоматичний режим при намотуванні каната 50 на канатний барабан 14 описаний далі: Приведення в дію звичайного елемента керування лебідкою, наприклад гідравлічного датчика попереднього регулювання, спричиняє зростання тиску в гідравлічному контурі канатної лебідки 10. Керувальний пристрій 70 оцінює сигнал мембранного вимикача і активізує автоматичний режим. Напрямна каретка 30 не рухається, канат 50 не дотикається жодної з контактних площадок 62. Канатний барабан 14 починає обертатися, і канат 50, як описано вище, напрямляється через намотувальний пристрій 20 і намотується на барабан 14, причому канат укладається у відповідні жолобки барабана або, якщо барабан має гладку поверхню, у можливе положення для наступного витка. Таким чином забезпечується аксіальне переміщення каната 50, завдяки цьому після намотування певної кількості витків канат дотикається однієї з контактних площадок 62. При цьому замикається електричний контакт ліворуч або праворуч, і керувальний пристрій 70 оцінює відповідний сигнал. Залежно від цього сигналу керувальний пристрій 70 приводить у дію ходовий клапан виконавчого гідроциліндра 28 таким чином, що напрямна каретка 30 переміщується відповідно до напрямку дотикання. Отже, керування роботою клапана в часі внаслідок системних зв'язків примусово здійснюється залежно від швидкості обертання канатного барабана 14. Напрямна каретка 30 переміщується в кінцеве положення, тобто вона переміщується в напрямку одного з механічних упорів 26. Цей упор встановлений таким чином, що канат 50 досягає фланцевого диска 18 канатного барабана 14 і при намотуванні першого витка нового шару дотикається розташованої навпроти контактної площадки 62. Результатом оцінки сигналу керувальним пристроєм 70 є зміна напрямку дії виконавчого гідроциліндра. Напрямна каретка 30 знову переміщується згідно з напрямком дотикання. Далі описаний можливий альтернативний режим ручного керування: У певних умовах чи режимах роботи можуть мати місце небажані реакції системи. Прикладами таких ситуацій є перше введення в експлуатацію, повторне введення системи в експлуатацію в положенні "зміна шару витків каната", грубі помилки позиціювання напрямної каретки 30, недостатня точність намотування та/або необхідність здійснення операцій з технічного обслуговування. У таких або інших умовах чи режимах роботи може скластися така ситуація, що канат 50 не може дотикатися жодної з контактних площадок 62, або випадково відбувається контакт між канатом і канатною площадкою, який спричиняє переміщення в неправильному напрямку. В цьому випадку положення каретки може бути виправлено вручну, або напрямна каретка 30 може бути спеціально встановлена в неправильне положення. Для цього за допомогою кнопкового вимикача, дія якого обмежена в часі блоком керування, може бути активізований так званий ручний режим. Ця функція дозволяє коригувати положення напрямної каретки 30. Корекцію можна здійснювати також при нерухомому канатному барабані 14. 5 UA 108620 C2 5 10 15 20 25 30 35 40 45 50 55 Далі описаний принцип дії канатного гальма 40: Якість чи точність намотування каната лебідкою залежить, зокрема, від кута підведення каната і навантаження на канат, насамкінець від натягу каната. Виконаний з можливістю переміщення вхідний канатний шків 34 чи канатний шків 44 забезпечують відповідний кут підведення каната до барабана. Обов'язковою умовою досягнення достатньої якості намотування каната чи уникнення заглиблення наступного шару витків намотаного на барабан каната у попередній шар витків у разі намотування каната у кілька шарів є забезпечення достатнього натягу каната. В звичайному випадку це досягається шляхом забезпечення навантаження на канат 50 лебідки. При цьому канатне гальмо 40 сприяє цьому забезпеченню натягу, або воно передбачене для намотування каната 50 без навантаження. Для цього за допомогою вимикача керують ходовим клапаном, який приводить у дію гідравлічний циліндр 46 односторонньої дії. Цей циліндр забезпечує достатньо щільне намотування чи достатнє зусилля притискання каната 50 до канатного шківа 44 канатного гальма 40. Завдяки цьому вбудований гальмівний пристрій 42 може самостійно або як додатковий засіб підтримувати натяг каната 50 при його намотуванні на барабан. Далі описаний автоматичний режим при розмотуванні каната на барабан: Процес розмотування каната з барабана відбувається аналогічно процесу намотування, тобто переміщення напрямної каретки 30 відбувається відповідно до положення каната залежно від сторони дотикання канатом контактної площадки. За допомогою мембранного вимикача система деблокується лише в разі приведення лебідки в дію. Гальмо при цьому не активізується. У цілому намотувальний пристрій 20 разом із напрямною кареткою 30, вхідним канатним шківом 34 і канатним гальмом 40 відрізняється оптимальною здатністю до узгодження з традиційними канатними лебідками. Завдяки цьому забезпечується можливість простого дооснащення традиційної канатної лебідки намотувальним пристроєм 20 для одержання відповідної винаходові канатної лебідки 10. При цьому хід поршня чи довжину виконавчого гідроциліндра 28 узгоджують із розмірами існуючої канатної лебідки, зокрема її канатного барабана. ФОРМУЛА ВИНАХОДУ 1. Машина для будівельних робіт, що містить: - опорну раму, - встановлену на опорній рамі щоглу та - канатну лебідку (10) з обертовим канатним барабаном (14) для приймання каната (50), причому канатна лебідка (10) оснащена намотувальним пристроєм (20), що містить: - вхідний канатний шків (34) для напрямлення каната (50), - виконану з можливістю переміщення вздовж осі обертання канатного барабана (14) напрямну каретку (30), на якій встановлений вхідний канатний шків (34), та - канатне гальмо (40) для забезпечення натягу каната (50) в зоні його підведення до канатного барабана (14), яка відрізняється тим, що містить: - вимірювальний пристрій, здатний визначати миттєве навантаження на канат (50), і - керувальний пристрій (70), здатний автоматично керувати канатним гальмом (40) і активізувати канатне гальмо (40) у разі зменшення миттєвого навантаження на канат (50) нижче граничного значення. 2. Машина для будівельних робіт за пунктом 1, яка відрізняється тим, що канатне гальмо (40) містить гальмівний пристрій (42) для гальмування канатного шківа (44), через який пропущений канат (50). 3. Машина для будівельних робіт за пунктом 2, яка відрізняється тим, що канатне гальмо (40) містить виконавчий гідроциліндр (46) для приведення в дію гальмівного пристрою (42). 4. Машина для будівельних робіт за будь-яким із пунктів 1-3, яка відрізняється тим, що керувальний пристрій (70) виконаний з можливістю регулювання гальмівного зусилля канатного гальма (40). 5. Машина для будівельних робіт за пунктом 4, яка відрізняється тим, що керувальний пристрій (70) містить лічильний пристрій для визначення кількості обертів канатного барабана (14). 6 UA 108620 C2 5 10 15 20 25 30 35 6. Машина для будівельних робіт за пунктом 4 або 5, яка відрізняється тим, що керувальний пристрій (70) виконаний з можливістю керування канатним гальмом (40) залежно від кількості визначених обертів канатного барабана (14). 7. Машина для будівельних робіт за будь-яким із пунктів 1-6, яка відрізняється тим, що намотувальний пристрій (20) містить виконавчий гідроциліндр (28) для переміщення напрямної каретки (30). 8. Машина для будівельних робіт за будь-яким із пунктів 1-7, яка відрізняється тим, що містить сенсорний пристрій (60), що має принаймні одну сенсорну площадку (62), виконаний з можливістю визначення положення каната (50) в поздовжньому напрямку канатного барабана (14), а також тим, що керувальний пристрій (70) виконаний зі здатністю керування переміщенням напрямної каретки (30) залежно від сигналу сенсорного пристрою (60). 9. Машина для будівельних робіт за будь-яким із пунктів 1-8, яка відрізняється тим, що контактний пристрій (60) має принаймні одну виконану з можливістю контактування з канатом (50) контактну площадку (62), а також тим, що керувальний пристрій (70) виконаний з можливістю керування переміщенням напрямної каретки (30) залежно від контактування принаймні однієї контактної площадки (62) з канатом (50). 10. Машина для будівельних робіт за пунктом 8 або 9, яка відрізняється тим, що керувальний пристрій (70) виконаний з можливістю формування вихідного сигналу для безперервного переміщення напрямної каретки (30). 11. Машина для будівельних робіт за пунктом 9 або 10, яка відрізняється тим, що принаймні одна контактна площадка (62) розміщена в зоні підведення каната (50) до канатного барабана (14). 12. Машина для будівельних робіт за будь-яким із пунктів 9-11, яка відрізняється тим, що принаймні одна контактна площадка (62) встановлена на напрямній каретці (30) з можливістю переміщення разом із напрямною кареткою (30). 13. Машина для будівельних робіт за пунктом 12, яка відрізняється тим, що принаймні одна контактна площадка (62) встановлена з можливістю переміщення на напрямній каретці (30). 14. Машина для будівельних робіт за будь-яким із пунктів 9-13, яка відрізняється тим, що встановлено дві контактних площадки (62), причому перша контактна площадка (62) виконана з можливістю забезпечення керування переміщенням напрямної каретки (30) в одному напрямку, а друга контактна площадка (62) виконана з можливістю забезпечення керування переміщенням напрямної каретки (309) в іншому напрямку. 15. Машина для будівельних робіт за пунктом 14, яка відрізняється тим, що передбачений упор (26) для напрямної каретки (30), який встановлений таким чином, що канат (50) досягає аксіального обмежувального елемента канатного барабана (14), коли напрямна каретка (30) дотикається упора (26), і при намотуванні наступного витка для зміни напрямку переміщення напрямної каретки (30) дотикається другої контактної площадки (62). 7 UA 108620 C2 8 UA 108620 C2 9 UA 108620 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори російськоюKonnecker Hans-Otto
МПК / Мітки
МПК: E21B 19/084, E21B 7/02, B66D 1/50, B66D 1/38
Мітки: машина, робіт, будівельних
Код посилання
<a href="https://ua.patents.su/12-108620-mashina-dlya-budivelnikh-robit.html" target="_blank" rel="follow" title="База патентів України">Машина для будівельних робіт</a>
Пристрій для виконання будівельних робіт
Номер патенту: 81809
Опубліковано: 11.02.2008
Автор: Штьотцер Ервін
МПК: E21B 15/00
Мітки: виконання, пристрій, робіт, будівельних
Формула / Реферат:
1. Пристрій для виконання будівельних робіт, який містить- опору (10),- встановлену на передній грані (5) опори (10) з можливістю поздовжнього переміщення каретку (20) для утримання інструмента,- принаймні один прокладений вздовж опори (10) привідний ланцюг (30, 30') для каретки (20),- принаймні одну встановлену на каретці (20) із можливістю обертання привідну шестірню (40, 40'), що перебуває у зчепленні з...
Монтажна піна для будівельних робіт
Номер патенту: 54862
Опубліковано: 17.03.2003
Автори: Турченко Дмитро Кузьмич, Онопрієнко Олександр Леонідович
МПК: C08J 9/00, B01F 17/00
Мітки: будівельних, піна, монтажна, робіт
Формула / Реферат:
Монтажна піна для будівельних робіт, до складу суміші якої входить поліольний компонент, ізоціанатний компонент і газ-спінювач, яка відрізняється тим, що як газ-спінювач застосовується газ R134a, при цьому вміст складових компонентів піни має наступне співвідношення у відсотках за масою: Поліольний компонент 30 - 35 Ізоціанатний компонент 40 - 45 ...
Прямий кут для будівельних робіт
Номер патенту: 23021
Опубліковано: 10.05.2007
Автори: Другов Олексій Володимирович, Другов Володимир Васильович
МПК: B25F 1/00, G01B 5/24, G01B 21/22
Мітки: робіт, прямій, кут, будівельних
Формула / Реферат:
1. Прямий кут для будівельних робіт, який відрізняється тим, що на ньому виконаний щонайменше один засіб показання рівня.2. Прямий кут для будівельних робіт за п. 1, який відрізняється тим, що додатково містить щонайменше один опорний профіль, що встановлюється на поверхню установки.3. Прямий кут для будівельних робіт за кожним з пп. 1 або 2, який відрізняється тим, що додатково містить щонайменше один засіб...
Телескопічний стояк для проведення будівельних робіт
Номер патенту: 1202
Опубліковано: 15.04.2002
Автор: Ковтун Вячеслав Іванович
МПК: E04G 25/00
Мітки: проведення, будівельних, робіт, стояк, телескопічний
Формула / Реферат:
Телескопічний стояк для проведення будівельних робіт, який містить трубу з декількома парами отворів, площадку, фіксуючі елементи і опору, який відрізняється тим, що він виконаний спареним, причому обидві його частини жорстко з'єднані між собою, а опори забезпечені підвісними ніжками, закріпленими з можливістю їх повороту і фіксації.
Телескопічний стояк для проведення будівельних робіт
Номер патенту: 1203
Опубліковано: 15.04.2002
Автор: Ковтун Вячеслав Іванович
МПК: E04G 25/00
Мітки: будівельних, телескопічний, робіт, стояк, проведення
Формула / Реферат:
Телескопічний стояк для проведення будівельних робіт, який містить трубу з декількома парами отворів, площадку, фіксуючі елементи і опору, який відрізняється тим, що він виконаний спареним, причому обидві його частини з'єднані між собою площадкою, яка являє собою замкнуту порожнисту раму, бокові стінки якої установлені рухомо на трубах, а опори виконані у вигляді ніжок, з'єднаних з нижніми закінченнями труб.
Попередній патент: Пестицидні композиції
Наступний патент: Сенсорний пристрій і спосіб електророзвідування покладів мінеральної сировини
Випадковий патент: Спосіб приготування біопалива для дизельних двигунів на основі рослинних олій