Спосіб доплерівської пеленгації на основі j-кореляційної обробки та пристрій для його здійснення
Номер патенту: 109133
Опубліковано: 27.07.2015
Автори: Харченко Володимир Петрович, Сорочан Анатолій Григорович

Формула / Реферат
1. Спосіб доплерівської пеленгації на основі J-кореляційної обробки, згідно з яким кутове положення джерела випромінювання визначається за допомогою двох неспрямованих антен з базовою відстанню ![]() , за допомогою яких формується рівносигнальний напрямок (РСН), як перпендикуляр з центра базової відстані, при обертанні антен з кутовою швидкістю
, за допомогою яких формується рівносигнальний напрямок (РСН), як перпендикуляр з центра базової відстані, при обертанні антен з кутовою швидкістю ![]() їх відстань до джерела випромінювання змінюється, що формує в антенах напруги
їх відстань до джерела випромінювання змінюється, що формує в антенах напруги ![]() і
і ![]() , в яких виникає ефект Доплера, який викликає фазову модуляцію, отримані напруги відрізняються відносною просторовою часовою затримкою
, в яких виникає ефект Доплера, який викликає фазову модуляцію, отримані напруги відрізняються відносною просторовою часовою затримкою ![]() , вихідні сигнали антен зміщуються вниз по частоті і оброблюються, по першому каналу сигнал
, вихідні сигнали антен зміщуються вниз по частоті і оброблюються, по першому каналу сигнал ![]() ділиться на дві рівні частини, одна з яких затримується на сталу часу
ділиться на дві рівні частини, одна з яких затримується на сталу часу ![]() , друга відноситься по частоті на частоту гетеродину
, друга відноситься по частоті на частоту гетеродину ![]() високої стабільності та отримує затримку в часі на сталу
високої стабільності та отримує затримку в часі на сталу ![]() , одержані сигнали перемножують, після чого на частоті
, одержані сигнали перемножують, після чого на частоті ![]() отримують сигнал
отримують сигнал ![]() , у якого індекс модуляції
, у якого індекс модуляції ![]() і визначається різницею затримок
і визначається різницею затримок ![]() , по другому каналу сигнал
, по другому каналу сигнал ![]() затримують на сталу часу
затримують на сталу часу ![]() , після чого перемножують з сигналом затриманим на сталу часу
, після чого перемножують з сигналом затриманим на сталу часу ![]() , з результату перемноження на частоті
, з результату перемноження на частоті ![]() виділяють сигнал
виділяють сигнал ![]() , індекс модуляції якого
, індекс модуляції якого ![]() змінюється від 0 до
змінюється від 0 до ![]() в залежності від відносної часової затримки
в залежності від відносної часової затримки ![]() , в спектрах сигналів
, в спектрах сигналів ![]() і
і ![]() режектують спектральні складові з частотою
режектують спектральні складові з частотою ![]() , отримують відповідно сигнали
, отримують відповідно сигнали ![]() і
і ![]() , одержані сигнали перемножують, після чого на частоті
, одержані сигнали перемножують, після чого на частоті ![]() виділяють гармонічний сигнал
виділяють гармонічний сигнал ![]() , як результат згортки спектральних складових режектованих сигналів, рівень сигналу
, як результат згортки спектральних складових режектованих сигналів, рівень сигналу ![]() залежить від кутового положення цілі, отриманий сигнал детектують по амплітуді, отримують
залежить від кутового положення цілі, отриманий сигнал детектують по амплітуді, отримують ![]() , який відрізняється тим, що обертання обох антен по колу радіусом
, який відрізняється тим, що обертання обох антен по колу радіусом ![]() з кутовою швидкістю
з кутовою швидкістю ![]() призводить до обертання РСН, за рахунок цього рівень сигналу
призводить до обертання РСН, за рахунок цього рівень сигналу ![]() залежить від відносної часової затримки
залежить від відносної часової затримки ![]() і формується у вигляді пилоподібної напруги, при збігу РСН з напрямом на ціль
і формується у вигляді пилоподібної напруги, при збігу РСН з напрямом на ціль ![]() напруга
напруга ![]() приймає значення
приймає значення ![]() , отриманий таким чином сигнал
, отриманий таким чином сигнал ![]() двічі диференціюють, отримують
двічі диференціюють, отримують ![]() , цей сигнал обмежують по рівню відповідно з умовою
, цей сигнал обмежують по рівню відповідно з умовою ![]() , якщо
, якщо ![]() , після чого отримують сигнал у вигляді дельта функції, по моменту формування дельта імпульсу визначається момент часу, при якому РСН збігся з напрямом на ціль, початок відліку часу починається з моментом збігу РСН з напрямком на північ, для виявлення однозначного відліку
, після чого отримують сигнал у вигляді дельта функції, по моменту формування дельта імпульсу визначається момент часу, при якому РСН збігся з напрямом на ціль, початок відліку часу починається з моментом збігу РСН з напрямком на північ, для виявлення однозначного відліку ![]() з сигналів
з сигналів ![]() і
і ![]() виділяють спектральні складові
виділяють спектральні складові ![]() і
і ![]() частотами
частотами ![]() або
або ![]() , перемножують, з результату множення виділяють періодичну напругу
, перемножують, з результату множення виділяють періодичну напругу ![]() з частотою обернення РСН, значенням кутового положення цілі буде значення
з частотою обернення РСН, значенням кутового положення цілі буде значення ![]() , яке відповідає негативному або позитивному, в залежності з якими частотами виділяють спектральні складові, схилу напруги
, яке відповідає негативному або позитивному, в залежності з якими частотами виділяють спектральні складові, схилу напруги ![]() .
.
2. Пристрій доплерівської пеленгації на основі J-кореляційної обробки, який містить дві неспрямовані антени з базовою відстанню ![]() , перший та другий лінійні тракти, кожен з яких має два входи і один вихід, кожен з перших входів лінійних трактів з'єднаний з виходами відповідних антен, другі входи лінійних трактів з'єднані з гетеродином, вихід першого лінійного тракту з'єднаний з першим входом змішувача, другий вхід змішувача з'єднаний з кварцовим гетеродином, вихід змішувача через смуговий фільтр з'єднаний з першим входом другого перемножувача, другий вхід другого перемножувача з'єднаний з входом змішувача через третю лінію затримки, вихід другого перемножувача з'єднаний з амплітудним детектором через послідовно ввімкнені перший режекторно-смуговий фільтр, перший вхід третього перемножувача і вузькосмуговий фільтр, вихід другого лінійного тракту через другу лінією затримки з'єднаний з першим входом першого перемножувача, другий вхід якого з'єднаний з виходом смугового фільтру, вихід першого перемножувача через другий режекторно-смуговий фільтр з'єднаний з другим входом третього перемножувача, який відрізняється тим, що в нього введені двигун, що обертає антени, опорний гетеродин, який задає частоту обертання двигуна, і який через першу лінію затримки з'єднаний з другим входом вимірювача фази, вихід амплітудного детектора через послідовно ввімкнені перший, другий диференціюючи ланцюги, обмежувач рівня, з'єднаний з першим входом вимірювача фази, перший та другий вузькосмугові фільтри, четвертий перемножувач, фільтр низьких частот, вихід другого перемножувача з'єднаний з першим входом четвертого перемножувача через перший вузькосмуговий фільтр, вихід першого перемножувача, з'єднаний з третім входом вимірювача фази через послідовно ввімкнені другий вузькосмуговий фільтр, другий вхід четвертого перемножувача, фільтр низьких частот, вихід вимірювача фази є виходом пристрою.
, перший та другий лінійні тракти, кожен з яких має два входи і один вихід, кожен з перших входів лінійних трактів з'єднаний з виходами відповідних антен, другі входи лінійних трактів з'єднані з гетеродином, вихід першого лінійного тракту з'єднаний з першим входом змішувача, другий вхід змішувача з'єднаний з кварцовим гетеродином, вихід змішувача через смуговий фільтр з'єднаний з першим входом другого перемножувача, другий вхід другого перемножувача з'єднаний з входом змішувача через третю лінію затримки, вихід другого перемножувача з'єднаний з амплітудним детектором через послідовно ввімкнені перший режекторно-смуговий фільтр, перший вхід третього перемножувача і вузькосмуговий фільтр, вихід другого лінійного тракту через другу лінією затримки з'єднаний з першим входом першого перемножувача, другий вхід якого з'єднаний з виходом смугового фільтру, вихід першого перемножувача через другий режекторно-смуговий фільтр з'єднаний з другим входом третього перемножувача, який відрізняється тим, що в нього введені двигун, що обертає антени, опорний гетеродин, який задає частоту обертання двигуна, і який через першу лінію затримки з'єднаний з другим входом вимірювача фази, вихід амплітудного детектора через послідовно ввімкнені перший, другий диференціюючи ланцюги, обмежувач рівня, з'єднаний з першим входом вимірювача фази, перший та другий вузькосмугові фільтри, четвертий перемножувач, фільтр низьких частот, вихід другого перемножувача з'єднаний з першим входом четвертого перемножувача через перший вузькосмуговий фільтр, вихід першого перемножувача, з'єднаний з третім входом вимірювача фази через послідовно ввімкнені другий вузькосмуговий фільтр, другий вхід четвертого перемножувача, фільтр низьких частот, вихід вимірювача фази є виходом пристрою.
Текст
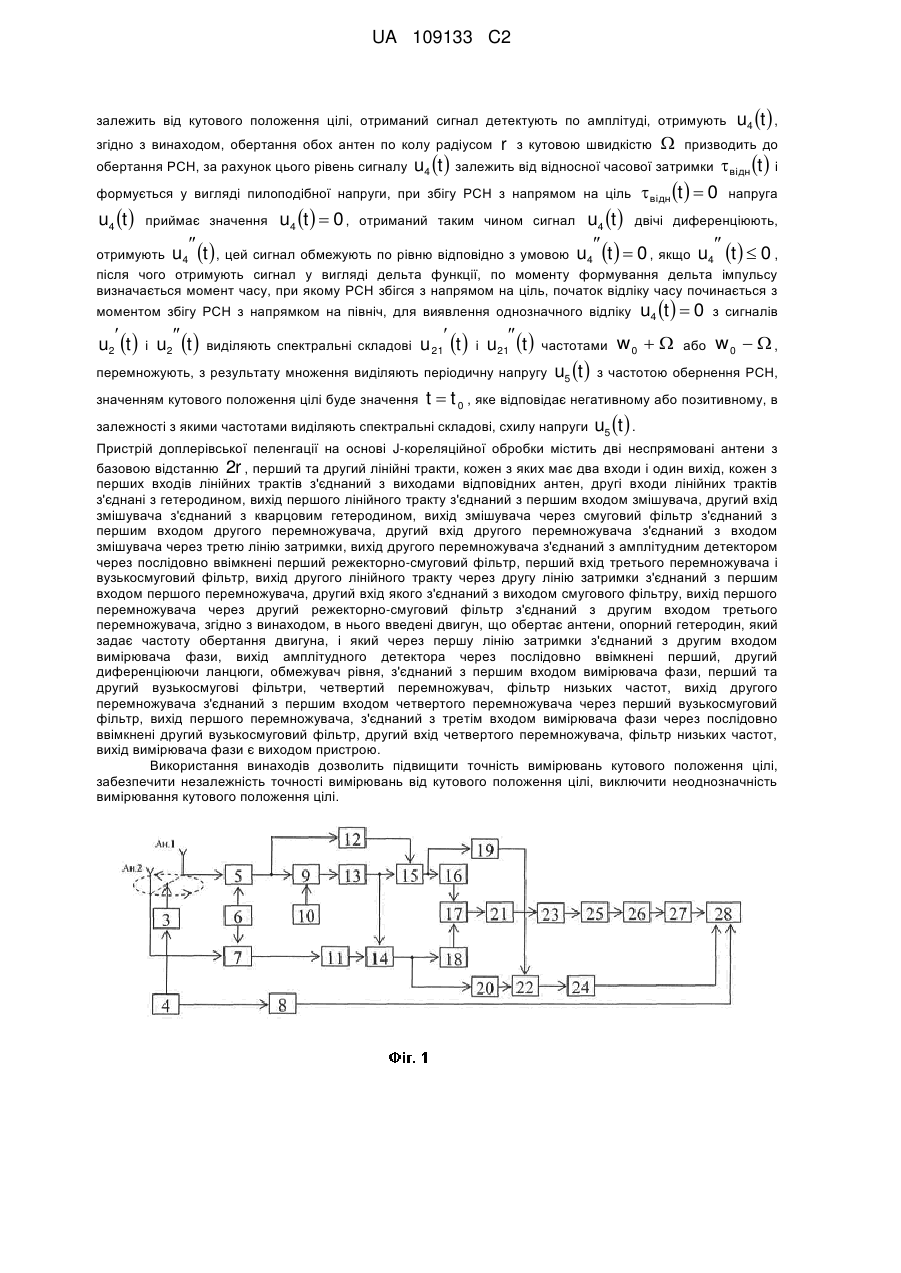
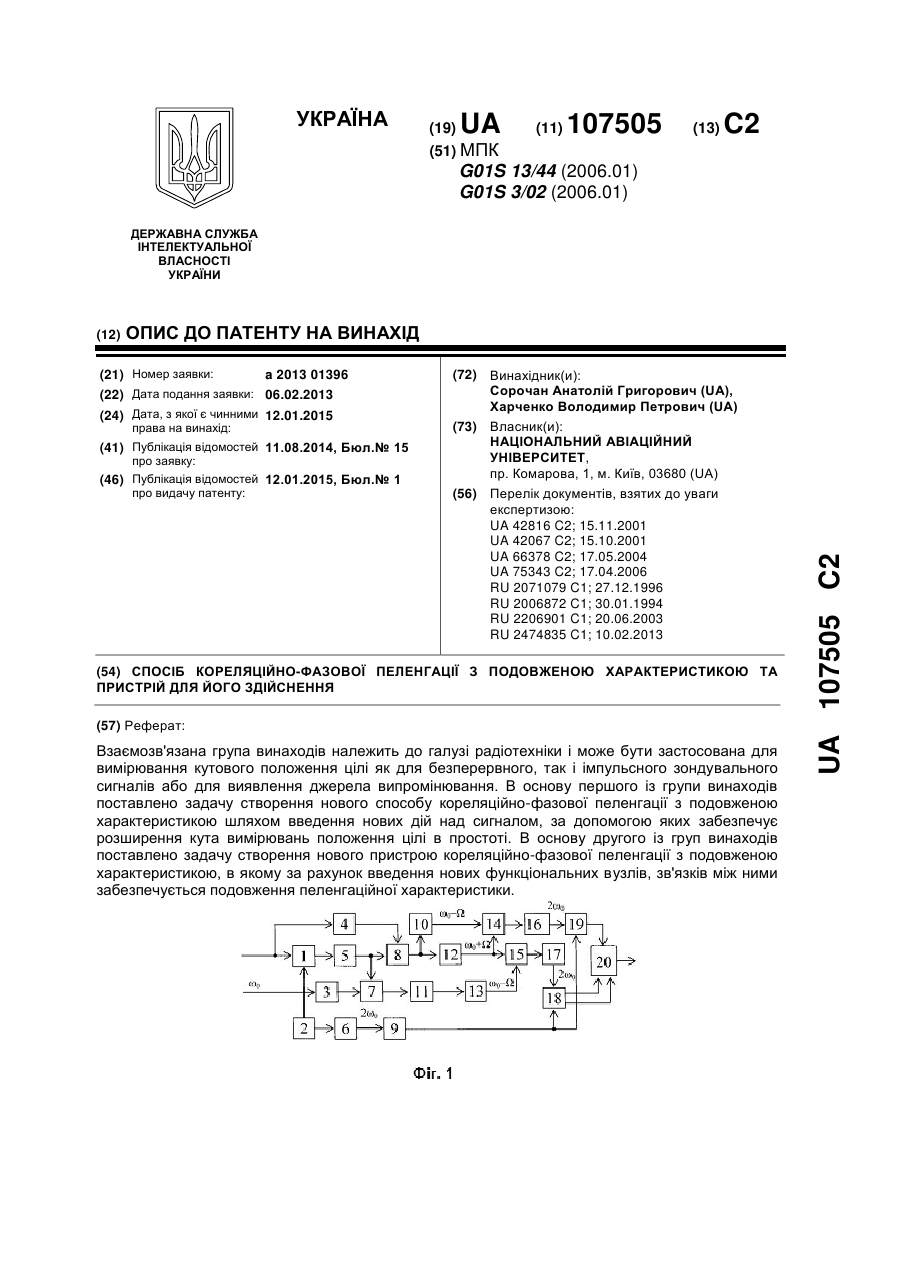
Реферат: Взаємозв'язана група винаходів належить до галузі радіолокації, радіонавігації і може бути застосована для вимірювання кутового положення цілі або виявлення напрямку джерела випромінювання. Спосіб доплерівської пеленгації на основі J-кореляційної обробки, згідно з яким кутове положення джерела випромінювання визначається за допомогою двох неспрямованих антен з базовою відстанню 2r , за допомогою яких формується рівносигнальний напрямок (РСН), як перпендикуляр з центра базової відстані, при обертанні антен з кутовою швидкістю їх відстань до джерела випромінювання змінюється, що формує в антенах напруги u1 t і u2 t , в яких виникає ефект Доплера, який викликає фазову модуляцію, отримані напруги відрізняються відносною просторовою часовою затримкою відн t 2 r / c sint , першому каналу сигнал u1t вихідні сигнали антен зміщуються вниз по частоті і оброблюються, по ділиться на дві рівні частини, одна з яких затримується на сталу часу друга відноситься по частоті на частоту гетеродину високої стабільності та отримує затримку в часі на ф , одержані сигнали перемножують, після чого на частоті w г сталу індекс модуляції сигнал часу wг u2 t ф , var 2 const і визначається різницею затримок затримують на сталу часу 2 , після з результату перемноження на частоті змінюється від 0 до max 2 3 , отримують сигнал 3 ф , u2 t , у якого по другому каналу чого перемножують з сигналом затриманим на сталу wг виділяють сигнал u2 t , індекс модуляції якого в залежності від відносної часової затримки відн t , в спектрах u2 t і u2 t режектують спектральні складові з частотою w г , отримують відповідно сигнали u2p t і u2p t , одержані сигнали перемножують, після чого на частоті 2w г виділяють гармонічний сигналів сигнал u3 t , як результат згортки спектральних складових режектованих сигналів, рівень сигналу u3 t UA 109133 C2 (12) UA 109133 C2 залежить від кутового положення цілі, отриманий сигнал детектують по амплітуді, отримують згідно з винаходом, обертання обох антен по колу радіусом обертання РСН, за рахунок цього рівень сигналу u4 t r з кутовою швидкістю приймає значення u4 t 0 , призводить до залежить від відносної часової затримки формується у вигляді пилоподібної напруги, при збігу РСН з напрямом на ціль u4 t отриманий таким чином сигнал u4 t , відн t 0 відн t і напруга u4 t двічі диференціюють, u4 t 0 , якщо u4 t 0 , отримують u4 t , цей сигнал обмежують по рівню відповідно з умовою після чого отримують сигнал у вигляді дельта функції, по моменту формування дельта імпульсу визначається момент часу, при якому РСН збігся з напрямом на ціль, початок відліку часу починається з моментом збігу РСН з напрямком на північ, для виявлення однозначного відліку u2 t і u2 t виділяють спектральні складові u 21 t і u21 t частотами перемножують, з результату множення виділяють періодичну напругу u5 t u4 t 0 w0 або з сигналів w0 , з частотою обернення РСН, t t 0 , яке відповідає негативному або позитивному, в залежності з якими частотами виділяють спектральні складові, схилу напруги u5 t . значенням кутового положення цілі буде значення Пристрій доплерівської пеленгації на основі J-кореляційної обробки містить дві неспрямовані антени з базовою відстанню 2r , перший та другий лінійні тракти, кожен з яких має два входи і один вихід, кожен з перших входів лінійних трактів з'єднаний з виходами відповідних антен, другі входи лінійних трактів з'єднані з гетеродином, вихід першого лінійного тракту з'єднаний з першим входом змішувача, другий вхід змішувача з'єднаний з кварцовим гетеродином, вихід змішувача через смуговий фільтр з'єднаний з першим входом другого перемножувача, другий вхід другого перемножувача з'єднаний з входом змішувача через третю лінію затримки, вихід другого перемножувача з'єднаний з амплітудним детектором через послідовно ввімкнені перший режекторно-смуговий фільтр, перший вхід третього перемножувача і вузькосмуговий фільтр, вихід другого лінійного тракту через другу лінію затримки з'єднаний з першим входом першого перемножувача, другий вхід якого з'єднаний з виходом смугового фільтру, вихід першого перемножувача через другий режекторно-смуговий фільтр з'єднаний з другим входом третього перемножувача, згідно з винаходом, в нього введені двигун, що обертає антени, опорний гетеродин, який задає частоту обертання двигуна, і який через першу лінію затримки з'єднаний з другим входом вимірювача фази, вихід амплітудного детектора через послідовно ввімкнені перший, другий диференціюючи ланцюги, обмежувач рівня, з'єднаний з першим входом вимірювача фази, перший та другий вузькосмугові фільтри, четвертий перемножувач, фільтр низьких частот, вихід другого перемножувача з'єднаний з першим входом четвертого перемножувача через перший вузькосмуговий фільтр, вихід першого перемножувача, з'єднаний з третім входом вимірювача фази через послідовно ввімкнені другий вузькосмуговий фільтр, другий вхід четвертого перемножувача, фільтр низьких частот, вихід вимірювача фази є виходом пристрою. Використання винаходів дозволить підвищити точність вимірювань кутового положення цілі, забезпечити незалежність точності вимірювань від кутового положення цілі, виключити неоднозначність вимірювання кутового положення цілі. 5 10 Взаємозв'язана група винаходів належить до галузі радіолокації, радіонавігації і може бути застосована для вимірювання кутового положення цілі або виявлення напрямку джерела випромінювання. Різновидом доплерівського способу пеленгації є квазідоплерівській спосіб, в якому замість однієї антени, що обертається по колу, використовується декілька нерухомих антен, які розташовані по колу з радіусом r та які по черзі підключаються до входу приймача пеленгатора. Недолік доплерівського способу пеленгації - для підвищення точності вимірювань необхідно збільшувати радіус обертання антени. Також відомий, вибраний як прототип, J-кореляційний спосіб пеленгації [3, 4], згідно з яким, сигнали з двох рознесених на базу x антен оброблюються. З першої антени сигнал u1 t затримується на регульовану калібровану часову затримку x , отримують сигнал u1 t x , який розділяють на дві рівні частини. Одну частину сигналу відносять по частоті на частоту гетеродину w г і затримують на сталу часу 1 , одержаний сигнал u1 t x 1 перемножують з другою частиною сигналу 15 u1 t x , з результату помноження на частоті w г виділяють опорний сигнал u1 t , у якого індекс модуляції 2 const і визначається затримкою на 1 . З другої антени сигнал u1 t затримують на фіксований час 0 і перемножують з сигналом u1 t x 1 , отриманим від першої антени, з результату помноження на частоті w г виділяють сигнал u1 t , індекс модуляції якого var змінюється від 0 до max 2 і залежить від значень затримок x та . В спектрах сигналів u1 t і u1 t режектують спектральні складові з частотою w г , одержані сигнали перемножують, після чого на частоті 2w г виділяють гармонічний сигнал u 2 t , як результат сталу часу 20 згортки спектральних складових режектованих сигналів. Отриманий сигнал детектують по амплітуді. Значення відносної часової затримки отримують зміною регульованої каліброваної 25 30 затримки x , доводячи значення напруги u 2 t до рівня рівного нулю. Недоліком J-кореляційного способу пеленгації є залежність точності вимірювання пеленга від кутового положення цілі, невеликий кутовий діапазон точного вимірювання кутового положення цілі, неоднозначність відліку. Відомий доплерівський пеленгатор [1, 2], в якому для визначення місця розташування джерела випромінювання використовуються дві неспрямовані в горизонтальній площині антени, одна з яких рухається з кутовою швидкістю по колу радіусом r навколо іншої центральної нерухомої антени. Частота обертання антени визначається частотою опорного генератора u0 t U0 cos t , фаза якого дорівнює нулю в момент проходження антеною, яка 35 обертається, північного напрямку. При русі антени її відстань до джерела випромінювання змінюється за періодом 2 / r , виникає ефект Доплера, що викликає фазову модуляцію, в прийнятому антеною високочастотному коливанні по закону u t E sin 2ƒ 0 t cos t 0 , 0 2r / 0 - індекс модуляції; 0 c де 40 фаза модулюючого коливання, ƒ0 - довжина хвилі джерела випромінювання; обумовлена кутовим положенням джерела випромінювання. Нерухомою антеною приймається немодульоване високочастотне коливання u t E sin 2ƒ 0 t . Інформація про пеленг укладена у фазі модулюючого коливання, значення якої виділяється порівнянням фази в модульованому коливанні u t і фази сигналу, що надходить від ut зміщують вниз по частоті на частоту кварцового генератора w г , отримують коливання uг t E sin2ƒ 0 t w г t , сигнали ut і ut перемножують, з результату множення виділяють сигнал на частоті кварцового генератора w г , який поділяють нерухомої антени. Сигнал 45 на дві рівні частини, одну з яких подають на перший вхід фазового детектора, іншу - на другий вхід через лінію затримки, в результаті на виході фазового детектора виділяється модулююче 1 UA 109133 C2 коливання Ucost 0 , виділене коливання подається на ортогональну систему коливань, утворених від опорного генератора, використання ортогональної системи дозволяє отримати проекції виділеного коливання, за якими обчислюється кутове положення цілі 0 . 5 10 15 20 25 30 35 40 Відомий пристрій доплерівського пеленгатора [3], що містить дві неспрямовані в горизонтальній площині антени, одна з яких рухається з кутовою швидкістю по колу радіусом r навколо іншої центральної нерухомої антени. Управління обертанням забезпечується двигуном, частоту обертання якого визначає опорний генератор, другий і третій виходи якого з'єднані з відповідними входами вимірювача фази, перша, що обертається, антена, через перший вхід першого лінійного тракту підключена до першого входу першого змішувача, друга антена, що не обертається, через перший вхід другого лінійного тракту, другі входи першого і другого лінійного тракту з'єднані з гетеродином, перший вхід другого змішувача з'єднаний з другим входом першого змішувача, другий вхід другого змішувача з'єднаний з виходом кварцового генератора, вихід першого змішувача з'єднаний з першим входом фазового детектора і через лінію затримки з другим входом фазового детектора, вихід фазового детектора з'єднаний з першим входом вимірювача фази, вихід якого є виходом пристрою. Недоліком пристрою є те, що підвищення точності вимірювань досягається за рахунок збільшення радіуса r обертання антени. Відомий пристрій J-кореляційного пеленгатора [4] містить дві неспрямовані антени з базовою відстанню B 2 r між ними, які через перші входи першого та другого лінійного тракту з'єднані відповідно з регульованою каліброваною лінією затримки та фіксованою лінією затримки, другі входи лінійних трактів з'єднані з генератором, вихід регульованої каліброваної лінії затримки через послідовно ввімкнені сигнальний вхід змішувача, лінію затримки, перший вхід другого перемножувача, перший режекторно-смуговий фільтр, перший вхід третього перемножувача, з'єднаний з вузькосмуговим фільтром, вихід регульованої каліброваної лінії затримки також з'єднаний з другим входом другого перемножувача, гетеродинний вхід змішувача з'єднаний з гетеродином, вихід фіксованої лінії затримки через послідовно ввімкнені перший вхід першого перемножувача, другий режекторно-смуговий фільтр з'єднаний з другим входом третього перемножувача, а другий вхід першого перемножувача з'єднаний з виходом лінії затримки, виходом пристрою є вихід вузькосмугового фільтру. У цьому пристрої відлік кутового положення цілі здійснюється за деякий інтервал часу, необхідний для перебудови регульованої лінії затримки. В основу першого із групи винаходів покладено задачу створення нового способу доплерівської пеленгації на основі J-кореляційної обробки, в якому підвищується точність вимірювань, виключення потрібності в деякому часі на вимірювання кутового положення. В основу другого із груп винаходів поставлено задачу створення нового пристрою доплерівської пеленгації на основі J-кореляційної обробки, в якому точність вимірювань не залежить від кутового положення цілі, виключення використання регульованої каліброваної лінії затримки для вимірювання кутового положення цілі. Перша поставлена задача вирішується тим, що в способі доплерівської пеленгації на основі J-кореляційної обробки, згідно з яким кутове положення джерела випромінювання визначається за допомогою двох неспрямованих антен з базовою відстанню 2 r , за допомогою яких формується рівносигнальній напрямок (РСН), як перпендикуляр з центру базової відстані, при обертанні антен з кутовою швидкістю , їх відстань до джерела випромінювання змінюється, що формує в антенах напруги u1 t і u 2 t , в яких виникає ефект Доплера, який викликає фазову модуляцію, отримані напруги відрізняються відносною просторовою часовою затримкою відн t 2 r / c sin t , вихідні сигнали антен зміщуються вниз по частоті і оброблюються, 45 u1 t ділиться на дві рівні частини, одна з яких затримується на сталу часу 3 , друга відноситься по частоті на частоту гетеродину w г високої стабільності та отримує затримку в часі на сталу ф , одержані сигнали перемножують, після чого на частоті w г отримують сигнал u 2 t , у якого індекс модуляції 2 const і визначається різницею затримок 3 ф , по другому каналу сигнал u 2 t затримують на сталу часу 2 , після чого по першому каналу сигнал 50 перемножують з сигналом затриманим на сталу часу ф , з результату перемноження на частоті 2 UA 109133 C2 w г виділяють сигнал u 2 t , індекс модуляції якого var змінюється від 0 до max 2 в залежності від відносної часової затримки відн t , в спектрах сигналів u 2 t і u 2 t режектують спектральні складові з частотою w г , отримують відповідно сигнали u 2p t і u 2p t , одержані сигнали перемножують, після чого на частоті 2w г виділяють гармонічний 5 u 3 t як результат згортки спектральних складових режектованих сигналів, рівень сигналу u 3 t залежить від кутового положення цілі, отриманий сигнал детектують по амплітуді, сигнал u 4 t , згідно з винаходом, обертання обох антен по колу радіусом r з кутовою швидкістю призводить до обертання РСН, за рахунок цього рівень сигналу u 4 t залежить від відносної часової затримки відн t і формується у вигляді щитоподібної напруги, при збігу отримують 10 отн t 0 напруга u 4 t приймає значення u 4 t 0 , отриманий таким чином сигнал u 4 t двічі диференціюють, отримують u 4 t , цей сигнал обмежують по рівню відповідно з умовою u 4 t 0 , якщо u 4 t 0 , після чого отримують сигнал у вигляді РСН з напрямом на ціль дельта функції, по моменту формування дельта імпульсу визначається момент часу, при якому РСН збігся з напрямом на ціль, початок відліку часу починається з моментом збігу РСН з 15 напрямком на північ, для виявлення однозначного відліку виділяють спектральні складові u 4 t 0 з сигналів u 2 t і u 2 t u 21 t і u 21 t з частотами w 0 або w 0 , u 5 t з частотою обернення РСН, значенням кутового положення цілі буде значення t t 0 , яке відповідає перемножують, з результату множення виділяють періодичну напругу 20 25 30 35 40 45 негативному або позитивному, в залежності з якими частотами виділяють спектральні складові, схилу напруги u 5 t . Друга поставлена задача вирішується тим, що в пристрої кореляційно-доплерівської пеленгації, який містить дві неспрямовані антени з базовою відстанню 2 r , перший та другий лінійні тракти, кожен з яких має два входи і один вихід, кожен з перших входів лінійних трактів з'єднаний з виходами відповідних антен, другі входи лінійних трактів з'єднані з гетеродином, вихід першого лінійного тракту з'єднаний з першим входом змішувача, другий вхід змішувача з'єднаний з кварцовим гетеродином, вихід змішувача через смуговий фільтр з'єднаний з першим входом другого перемножувача, другий вхід другого перемножувача з'єднаний з входом змішувача через третю лінію затримки, вихід другого перемножувача з'єднаний з амплітудним детектором через послідовно ввімкнені перший режекторно-смуговий фільтр, перший вхід третього перемножувача і вузькосмуговий фільтр, вихід другого лінійного тракту через другу лінією затримки з'єднаний з першим входом першого перемножувача, другий вхід якого з'єднаний з виходом смугового фільтру, вихід першого перемножувача через другий режекторно-смуговий фільтр з'єднаний з другим входом третього перемножувала, згідно з винаходом, в нього введені двигун, що обертає антени, опорний гетеродин, який задає частоту обертання двигуна, і який через першу лінію затримки з'єднаний з другим входом вимірювача фази, вихід амплітудного детектора через послідовно ввімкнені перший, другий диференціюючі ланцюги, обмежувач рівня, з'єднаний з першим входом вимірювача фази, перший та другий вузько-смугові фільтри, четвертий перемножувач, фільтр низьких частот, вихід другого перемножувача з'єднаний з першим входом четвертого перемножувача через перший вузькосмуговий фільтр, вихід першого перемножувача, з'єднаний з третім входом вимірювача фази через послідовно ввімкнені другий вузькосмуговий фільтр, другий вхід четвертого перемножувача, фільтр низьких частот, вихід вимірювача фази є виходом пристрою. Суть винаходу пояснюється кресленнями, де на фіг. 1 приведена структурна схема запропонованого пристрою. Для того, щоб підвищити точність вимірювань кутового положення цілі, забезпечити незалежність точності вимірювань від кутового положення цілі, виключити неоднозначність вимірювання кутового положення цілі, в спосіб введені нові послідовності дій: 3 UA 109133 C2 використовують дві неспрямовані антени з базовою відстанню 2r , що обертається з кутовою швидкістю , формують рахунок двох обертових антен обертового рівносигнального напрямку з кутовою швидкістю , визначають за рахунок обертового РСН моменту часу t t 0 , 5 10 15 20 25 при якому відбулося збіг РСН з напрямком на ціль, формують періодичне коливання з частотою відповідно частоті обертання антен, яке дозволяє усунути неоднозначність вимірювання кутового положення цілі, послідовності обробки сигналу, яка включає подвійне диференціювання та обмеження сигналу, що дозволяє підвищити точність вимірювань. На фіг. 1 приведена структурна схема запропонованого пристрою, де Ан.1 і Ан.2 - перша та друга антена; 3 - двигун; 4 - опорний генератор; 5 і 7 - перший та другий лінійні тракти приймача; 6 - генератор; 8 - перша лінія затримки; 9 - змішувач; 10 - кварцовий генератор; 11 і 12 - друга та третя лінії затримки; 13 - смуговий фільтр; 14 і 15 - перший та другий перемножувачі; 16 і 18 перший та другий режекторно-смугові фільтри; 17 - третій перемножувач, 19 і 20 - перший і другий вузькосмуговий фільтр; 21 - вузькосмуговий фільтр; 22 - четвертий перемножувач; 23 амплітудний детектор; 24 - фільтр низьких частот; 25, 26 - перший та другий диференціюючий ланцюг; 27 - обмежувач; 28 - вимірювач фази. На фіг. 2 приведено зміну вихідної напруги на виході амплітудного детектора 23 при обертанні по колу РСН напрямку. На фіг. 3 приведено результат першого диференціювання вихідної напруги детектора, яка зображена на фіг. 4. На фіг. 4 приведено напругу, як результат другого диференціювання вихідної напруги детектора. На фіг. 5 приведено часову діаграму напруги на виході фільтра низьких частот. Пристрій відрізняється наявністю нових функціональних вузлів та зв'язків між ними, тобто додатково введені двигун 3, за допомогою якого дві антени Ан.1 і Ан.2 з базовою відстанню 2 r обертаються по колу радіусом r , опорний генератор 4, першу 8 лінію затримки; перший 19 і другий 20 вузькосмуговий фільтр, четвертий перемножувач 22 і фільтр низьких частот 24 за допомогою яких формується періодична напруга u 5 t з частотою рівною частоті обертання 30 35 40 до двох обертових по колу радіусом r з кутовою швидкістю антен. За рахунок обертання антен в них виникає доплерівській зсув частоти, тим самим сигнали в антенах набувають фазову модуляцію. Сигнал, прийнятий першою антеною Ан.1, який проходить перетворення по частоті і діє на виході першого 5 лінійного тракту приймача, можна записати u1 t U1 cos w c t д t 0 , де U1 - амплітуда сигналу; w c - несуча частота сигналу, яка отримана в результаті 2r перетворення по частоті, д t cost - фаза коливання сигналу в перший антені 0 Ан.1, яка викликана ефектом Доплера, 0 - довжина хвилі прийнятого коливання; - кутове положення цілі; 45 антен, яка змінюється відповідно до зміни функції Бесселя J1 ; перший - 25, другий - 26 диференціюючі ланцюги; обмежувач - 27 забезпечують підвищення точності вимірювань за рахунок формування вихідної напруги у вигляді дельта функції в момент збігу рівносигнального напрямку з напрямком на ціль; вимірювач фази - 24, в якому визначається значення кутового положення цілі. Пристрій працює таким чином: Джерелом випромінювання є гармонійне коливання з частотою w 0 2ƒ 0 , яке надходить 0 - початкова фаза сигналу. Сигнал, що приймається другою антеною Ан.2, який проходить перетворення по частоті і діє на виході другого 7 лінійного тракту приймача, буде мати вигляд u 2 t U1 cos w c t д t 0 , де U1 - амплітуда сигналу; w c - несуча частота сигналу, яка отримана в результаті 2r перетворення по частоті другим лінійним трактом, д t cost отн t - фаза 0 4 UA 109133 C2 коливання сигналу в другий антені Ан.2, яка викликана ефектом Доплера, - відносна часова затримка сигналів, що діють на входах антен Ан.1 і відн t max sint Ан.2, max 2r / c - максимальне значення відносної часової затримки. 5 На виході опорного каналу, до складу якого входять: змішувач 9, кварцовий генератор 10, третя 12 лінія затримки, смуговий фільтр 13 і другий 15 перемножувач, формується сигнал u2 t U2 cos w г t sint 0,5 ф 3 w c 3 ф w г ф де U2 амплітуда сигналу, wг частота кварцового генератора, 4r sin0,5 3 ф - знову сформований індекс модуляції, 3 - часова затримка в 0 третій 12 лінії затримки, ф - часова затримка в смуговому фільтрі 13. 10 На виході регульованого каналу, до складу якого входять: змішувач 9, кварцовий генератор 10, смуговий фільтр 13, друга 11 лінія затримки і перший 14 перемножувач, формується сигнал 2r u 2 t U2 cos w г t sin t 0,5 2 2 sint w г ф , c 4r 2r де sin0,5 sint - знову сформований індекс модуляції, 2 - часова 0 c затримка в другій 11 лінії затримки. 15 В отриманих сигналах u 2 t спектральні складові з частотою u 2р t U2 J cos w n режекторними фільтрами 16 і 18 режектують w г , отримують 1 n і u2 t г nt n 0,5 ф 3 w c 3 ф w г ф U2 Jn cos w г nt n 0,5 ф 3 w c 3 ф w г ф ; n1 2r nt n 0,5 21 sint w г ф c n 2r U2 Jn cos w г nt n 0,5 21 sint w г ф . c n1 u 2р t U2 20 J cos w 1 n г В результаті перемножування в 17 спектральних складових з порядковим номером n u 2р t із спектральними складовими з порядковим номером - n сигналу uр t і, 2 сигналу навпаки, на частоті 2w г за допомогою вузькосмугового фільтру 21 виділяється сигнал, який з урахуванням властивостей функції Бесселя можна записати у вигляді 25 u3 t U3 Jn Jn cos 2w г t w c 2 1 2w г 1 . n1 Jn n1 n (величини const - постійні), то Jn можна вважати деяким коефіцієнтом K n , що залежить від n , тобто Оскільки залежать тільки від n1 n1 U3 Jn U3 K n , тоді 30 u 3 t U3 K n Jn cos 2w г t w c 2 1 2w г 1 . n1 Сигнал u 3 t детектують по амплітуді детектором 23, результат детектування: 5 UA 109133 C2 4r 2r u 4 t U3 K n Jn U3 K n Jn sin0,5 sint . c n1 n1 0 Максимальне значення індексу модуляції регульованого сигналу задається рівним 2 . Це значення забезпечується вибором r і . При 2 число спектральних складових n 3 . При обертанні антен індекс модуляції буде змінюватися від 2 до 0 . Відповідно, і напруга u 4 t буде змінюватися від максимальної до значення u 4 t 0 . дорівнює 5 Закон зміни напруги буде близьким до поведінки функції Бесселя першого порядку. При зміні індексу модуляції на ділянці від 0,5 до 0 напруга буде зменшуватись і мінятися по лінійному закону, а при переході через екстремальну точку u 4 t 0 почне збільшуватися за u 4 t 0 вказує на те, що РСН збігається з напрямком на ціль. Фіксуючи момент часу t t 0 , при якому виконується рівність u 4 t 0 , визначають кутове положення цілі, як t 0 . Для збільшення точності визначення точки u 4 t 0 (це теж саме що і t t 0 ) напругу з виходу амплітудного детектора 20 u 4 t (фіг. 2) диференціюють. Результатом першого 25 диференціювання із пилкоподібної напруги u 4 t в точці t t 0 формується ступінчата напруга u 4 t (фіг. 3). Повторне диференціювання 26 дає u 4 t з подальшим обмеженням в 27 відповідно до нерівності u 4 t 0 , якщо u 4 t 0 , веде до формування із ступінчатої тим же законом. Встановлення рівності 10 15 напруги - напругу у вигляді дельта функції. Все це істотно підвищує точність встановлення моменту часу t t 0 . Початок відліку часу збігається з моментом збігу РСН з напрямком на північ. По визначеному часу 20 t t 0 знаходять кутове положення цілі, як t 0 . Рівність u 4 t 0 може виконуватись в двох випадках: перший, коли РСН збігається з напрямком на ціль, тоді кутове положення цілі дорівнює , і другий, коли РСН займе кутове положення 1 в цей час напруга u 4 t також стає рівною нулю u 4 t 0 . Це призводить до виникнення неоднозначності вимірювань, яка усувається виділенням за допомогою вузькосмугових фільтрів 19 і 20 з сигналів u 2 t і u 2 t спектральних складових з 25 частотами w 0 або w 0 u21 t U2 J1 cos w г t 0,5 ф 3 w c 3 ф w г ф ; 2r u t U2 J1 cos w г t 0,5 21 sint w г ф , 21 c 30 їх перемножуванням в 22. Виділення з результату перемножування за допомогою фільтра низьких частот 24 періодичної напруги, яка визначиться виразом u5 t U5 J1 J1 . 4r sin0,5 3 ф const , тому добуток U5 J1 є 0 величина постійна і не залежить від обертання РСН антени, тоді як множник J1 має індекс В отриманій напрузі модуляції 35 4r 2r sin0,5 sint , 0 c який визначається відносним положенням РСН і цілі. Оскільки РСН обертається з кутовою швидкістю , тому індекс модуляції також змінюється з частотою від нуля до max 2 , а це в свою чергу призводить до періодичної зміни значення функції Бесселя, 6 UA 109133 C2 тому напруга u 5 t буде періодичною і матиме вигляд як на фіг. 5. Дійсним з двох значень буде те значення кутового положення, яке відповідає негативному або позитивному, в залежності з якими частотами виділяють спектральні складові, схилу напруги u 5 t . 5 10 15 Різновидом кореляційно-доплерівського способу пеленгації є квазікореляційнодоплерівський спосіб, в якому замість однієї антени, що обертається по колу з радіусом r , використовується декілька нерухомих антен, кількість яких повинна бути парною, що повинні бути розташованими по колу, діаметрально протилежними та попарно підключатися до входів відповідних лінійних трактів приймача. Джерела інформації: 1. Радиотехнические системы: Учебн. для вузов по спец. "Радиотехника" / [Ю.П. Гришин, В.Н. Ипатов, Ю.М. Казаринов, и др.]: под ред. Ю.М. Казаринова. - М: Высшая школа, 1990.-496 с. 2. Кукес И.С. Основы радиопеленгации / И.С. Кукес, М.Е. Старик. - М: Советское радио, 1964.-646 с. 3. Сорочан А.Г. J-корреляционный метод пеленгации / А.Г. Сорочан // Изв. вузов. Радиоэлектроника.-2001. - № 11. - С. 57-65. 4. Харченко В.П. Малобазовый метод пеленгации высокой точности / В.П. Харченко, А.Г. Сорочан // Вестник инженерной академии Украины. - 2010. - № 2. - С. 22-26. ФОРМУЛА ВИНАХОДУ 20 25 1. Спосіб доплерівської пеленгації на основі J-кореляційної обробки, згідно з яким кутове положення джерела випромінювання визначається за допомогою двох неспрямованих антен з базовою відстанню 2r , за допомогою яких формується рівносигнальний напрямок (РСН), як перпендикуляр з центра базової відстані, при обертанні антен з кутовою швидкістю їх відстань до джерела випромінювання змінюється, що формує в антенах напруги u1 t і u2 t , в яких виникає ефект Доплера, який викликає фазову модуляцію, отримані напруги відрізняються відносною просторовою часовою затримкою відн t 2 r / c sin t , вихідні сигнали антен зміщуються вниз по частоті і оброблюються, по першому каналу сигнал 30 u1t ділиться на дві 3 , друга відноситься по частоті на частоту гетеродину w г високої стабільності та отримує затримку в часі на сталу ф , одержані сигнали перемножують, після чого на частоті w г отримують сигнал u2 t , у якого індекс модуляції 2 const і визначається різницею затримок 3 ф , по другому каналу рівні частини, одна з яких затримується на сталу часу u2 t затримують на сталу часу 2 , після чого перемножують з сигналом затриманим на сталу часу ф , з результату перемноження на частоті w г виділяють сигнал u2 t , індекс сигнал 35 модуляції якого var змінюється від 0 до max 2 в залежності від відносної часової затримки відн t , в спектрах сигналів u2 t і u2 t режектують спектральні складові з частотою w г , отримують відповідно сигнали u2p t і u2p t , одержані сигнали перемножують, 2w г виділяють гармонічний сигнал u3 t , як результат згортки спектральних складових режектованих сигналів, рівень сигналу u3 t залежить від кутового положення цілі, отриманий сигнал детектують по амплітуді, отримують u4 t , який відрізняється тим, що обертання обох антен по колу радіусом r з кутовою швидкістю призводить до обертання РСН, за рахунок цього рівень сигналу u4 t залежить від відносної часової затримки відн t і формується у вигляді пилоподібної напруги, при збігу РСН з напрямом на ціль відн t 0 напруга u4 t приймає значення u4 t 0 , отриманий таким чином сигнал u4 t двічі диференціюють, отримують u4 t , цей сигнал обмежують по рівню після чого на частоті 40 45 7 UA 109133 C2 відповідно з умовою u4 t 0 , якщо u4 t 0 , після чого отримують сигнал у вигляді дельта функції, по моменту формування дельта імпульсу визначається момент часу, при якому РСН збігся з напрямом на ціль, початок відліку часу починається з моментом збігу РСН з напрямком u4 t 0 з сигналів u2 t і u2 t виділяють на північ, для виявлення однозначного відліку 5 u 21 t і u21 t частотами w 0 або w 0 , перемножують, з результату множення виділяють періодичну напругу u5 t з частотою обернення РСН, значенням кутового положення цілі буде значення t t 0 , яке відповідає негативному або спектральні складові позитивному, в залежності з якими частотами виділяють спектральні складові, схилу напруги u5 t . 10 15 20 25 30 2. Пристрій доплерівської пеленгації на основі J-кореляційної обробки, який містить дві неспрямовані антени з базовою відстанню 2r , перший та другий лінійні тракти, кожен з яких має два входи і один вихід, кожен з перших входів лінійних трактів з'єднаний з виходами відповідних антен, другі входи лінійних трактів з'єднані з гетеродином, вихід першого лінійного тракту з'єднаний з першим входом змішувача, другий вхід змішувача з'єднаний з кварцовим гетеродином, вихід змішувача через смуговий фільтр з'єднаний з першим входом другого перемножувача, другий вхід другого перемножувача з'єднаний з входом змішувача через третю лінію затримки, вихід другого перемножувача з'єднаний з амплітудним детектором через послідовно ввімкнені перший режекторно-смуговий фільтр, перший вхід третього перемножувача і вузькосмуговий фільтр, вихід другого лінійного тракту через другу лінію затримки з'єднаний з першим входом першого перемножувача, другий вхід якого з'єднаний з виходом смугового фільтру, вихід першого перемножувача через другий режекторно-смуговий фільтр з'єднаний з другим входом третього перемножувача, який відрізняється тим, що в нього введені двигун, що обертає антени, опорний гетеродин, який задає частоту обертання двигуна, і який через першу лінію затримки з'єднаний з другим входом вимірювача фази, вихід амплітудного детектора через послідовно ввімкнені перший, другий диференціюючи ланцюги, обмежувач рівня, з'єднаний з першим входом вимірювача фази, перший та другий вузькосмугові фільтри, четвертий перемножувач, фільтр низьких частот, вихід другого перемножувача з'єднаний з першим входом четвертого перемножувача через перший вузькосмуговий фільтр, вихід першого перемножувача, з'єднаний з третім входом вимірювача фази через послідовно ввімкнені другий вузькосмуговий фільтр, другий вхід четвертого перемножувача, фільтр низьких частот, вихід вимірювача фази є виходом пристрою. 8 UA 109133 C2 5 9 UA 109133 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюSorochan Anatolii Hryhorovych, Kharchenko Volodymyr Petrovych
Автори російськоюСорочан Анатолий Григорьевич, Харченко Владимир Петрович
МПК / Мітки
МПК: G01S 5/24
Мітки: здійснення, пеленгації, спосіб, основі, пристрій, доплерівської, j-кореляційної, обробки
Код посилання
<a href="https://ua.patents.su/12-109133-sposib-doplerivsko-pelengaci-na-osnovi-j-korelyacijjno-obrobki-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб доплерівської пеленгації на основі j-кореляційної обробки та пристрій для його здійснення</a>
Спосіб кореляційно-фазової пеленгації та пристрій для його здійснення
Номер патенту: 106986
Опубліковано: 10.11.2014
Автори: Сорочан Анатолій Григорович, Харченко Володимир Петрович
МПК: G01S 13/44, G01S 3/02
Мітки: пеленгації, пристрій, здійснення, спосіб, кореляційно-фазової
Формула / Реферат:
1. Спосіб кореляційно-фазової пеленгації, згідно з яким кутове положення цілі визначається по відбитому сигналу, який модульований за кутом однотональним гармонійним коливанням з частотою W, містить: по першому каналу - розгалуження сигналу на дві рівні частини, одна з яких затримується на сталу часу t2, друга належить по частоті до частоти гетеродину wr та отримує затримку в часі на сталу часу tф, одержані сигнали перемножують, після чого...
Спосіб кореляційно-фазової пеленгації з подовженою характеристикою та пристрій для його здійснення
Номер патенту: 107505
Опубліковано: 12.01.2015
Автори: Харченко Володимир Петрович, Сорочан Анатолій Григорович
МПК: G01S 3/02, G01S 13/44
Мітки: кореляційно-фазової, спосіб, пристрій, пеленгації, подовженою, характеристикою, здійснення
Формула / Реферат:
1. Спосіб кореляційно-фазової пеленгації з подовженою характеристикою, згідно з яким кутове положення цілі визначається по відбитому сигналу, який модульований за кутом, однотональним гармонійним коливанням, при його проходженні роздільними каналами розповсюдження включає: по першому каналу - розгалуження сигналу на дві рівні частини, одна з яких затримується на сталу часу
Спосіб вимірювання тимчасової затримки модульованого сигналу при його проходженні окремими каналами розповсюдження та пристрій для його здійснення
Номер патенту: 42816
Опубліковано: 15.11.2001
Автори: Сорочан Анатолій Григорович, Лігінов Сергій Михайлович, Литвиненко Валентин Іванович
МПК: G01S 3/00
Мітки: вимірювання, затримки, розповсюдження, проходженні, модульованого, каналами, окремими, сигналу, здійснення, тимчасово, пристрій, спосіб
Формула / Реферат:
1.Спосіб вимірювання тимчасової затримки модульованого сигналу при його - проходженні окремими каналами розповсюдження, містить регульовану калібровану затримку сигналу першого каналу, який відносять по частоті на частоту гетеродина wr і затрмують на сталу величину
J-кореляційний спосіб вимірювання далекості і пристрій, який його реалізує
Номер патенту: 70379
Опубліковано: 15.10.2004
Автори: Сорочан Анатолій Григорович, Лігінов Сергій Михайлович, Литвиненко Валентин Іванович
МПК: G01S 13/40, G01S 13/34
Мітки: реалізує, пристрій, вимірювання, далекості, спосіб, j-кореляційний
Формула / Реферат:
1. Спосіб J-кореляційного вимірювання далекості, що містить сигнал, модульований по частоті гармонійним коливанням з частотою Ω, розгалуження цього сигналу на дві частини, одна з яких випромінюється в простір, друга затримується на регульовану калібровану часову затримку і зміщується по частоті на частоту гетеродина Wг, після цього перемножується з відбитим сигналом,...
Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції та пристрій для його здійснення
Номер патенту: 66378
Опубліковано: 17.05.2004
Автори: Григор'єва Людмила Володимирівна, Клепфер Євген Іванович, Антонюк Володимир Павлович
МПК: G01S 5/00, G01S 13/42, G01S 13/06
Мітки: різниці, спосіб, пристрій, радіосигналу, затримки, обмеженим, часу, вузькосмугового, кореляції, інтервалом, вимірювання, здійснення
Формула / Реферат:
1. Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції, оснований на визначенні попереднього наближення різниці затримки сигналу по максимуму огинаючої взаємної кореляційної функції з подальшим уточненням результату по даних вимірювання фази в точці попереднього наближення, який відрізняється тим, що в умовах апріорної невизначеності несучої частоти сигналу, одночасно з вимірюванням фази...
Попередній патент: Мікрофлюїдний аналізатор та спосіб мікрофлюїдного аналізу проби
Наступний патент: Пристрій для інфузій, комплект, спосіб тримання пристрою для інфузій та переносний футляр для пристрою для інфузій
Випадковий патент: Реактор для проведення хімічних реакцій при контактуванні рідин, що не змішуються