Спосіб визначення азимуту осі об’єкта та пристрій для його реалізації
Номер патенту: 113826
Опубліковано: 10.03.2017
Автори: Підстригач Ігор Ярославович, Мишковець Роман Улянович, Палій Святослав Олегович, Хмиз Артем Павлович, Малярчук Дем'ян Миколайович, Терещук Ростислав Олегович
Формула / Реферат
1. Спосіб визначення азимуту осі об'єкта, який включає радіопеленгацію джерела випромінювання за допомогою антени та визначення його координат у системі координат, зв'язаній з об'єктом, який відрізняється тим, що радіопеленгацію проводять за допомогою гостронаправленої антени, що знаходиться на обертовій платформі, встановленій на об'єкті, за сигналами щонайменше одного геостаціонарного супутника визначають сигнатуру супутника та відповідно за ефемеридами супутника визначають його азимут та висоту над горизонтом, за допомогою давачів кутів повороту платформи та механізму вертикального наведення антени визначають напрями на геостаціонарний супутник відносно осі об'єкта, та за допомогою інклінометрів визначають кути нахилу об'єкта відносно горизонту, а обчислення значення азимуту осі об'єкта проводять наступним чином: з об'єктом та поверхнею Землі зв'язують прямокутні декартові системи координат, за показами інклінометрів та давачів кута повороту платформи та механізму вертикального наведення антени визначають кути Ейлера переходу між системами координат, а азимут осі об'єкта обраховують за формулою:
![]() , (1)
, (1)
причому значення ![]() ,
, ![]() визначаються з матричного рівняння
визначаються з матричного рівняння
 ,
,
де матриця ![]() рівна
рівна
 ,
,
а ![]() ,
,![]() ,
,![]() - кути Ейлера переходу між системами координат.
- кути Ейлера переходу між системами координат.
2. Спосіб визначення азимуту осі об'єкта за п. 1, який відрізняється тим, що при радіопеленгації за сигналами, щонайменше двох геостаціонарних супутників, визначені значення азимутів осі об'єкта усереднюють.
3. Спосіб визначення азимуту осі об'єкта за пп. 1, 2, який відрізняється тим, що як геостаціонарний супутник використовують телевізійний супутник.
4. Пристрій для реалізації способу визначення азимуту осі об'єкта за пп. 1-3, який містить вузол кріплення блоків та елементів пристрою, антену з опромінювачем, блоки керування та обробки сигналів та живлення, який відрізняється тим, що вузол кріплення блоків та елементів пристрою складається з основи та з'єднаної з нею обертової платформи, при цьому на основі встановлені керуючий процесор, безконтактний тороїдальний трансформатор, безконтактний направлений відгалужувач, блок безконтактної передачі живлення, блок акселерометрів, блок гіроскопів, блок індикатора з клавіатурою, вхід-вихід якого з'єднаний з керуючим процесором, другий вхід-вихід керуючого процесора з'єднаний з безконтактним направленим відгалужувачем, третій вхід керуючого процесора з'єднаний з виходом блока гіроскопів, а четвертий вхід керуючого процесора з'єднаний з блоком акселерометрів, вихід блока безконтактної передачі живлення з'єднаний з входом безконтактного тороїдального трансформатора, а на обертовій платформі розташовані привод обертання платформи, гостронаправлена антена з механізмом вертикального наведення, опромінювач антени, інклинометри, давачі нульового кута повороту, тобто, нульової позиції платформи та механізму вертикального наведення, аналоговий вимірювач напруженості поля, блок цифрової обробки сигналів, процесор рухомої платформи, блок стабілізаторів живлення обертової платформи, контролер двигуна приводу обертової платформи, контролер двигуна приводу механізму вертикального наведення, при цьому виходи інклінометрів та давачів нульового кута повороту, тобто, нульової позиції платформи та механізму вертикального наведення відповідно з'єднані з входами процесора рухомої платформи, інші входи яких відповідно з'єднані з виходами аналогового вимірювача напруженості поля та блока цифрової обробки сигналів, входи яких з'єднані з опромінювачем антени, а виходи процесора рухомої платформи відповідно з'єднані з входами контролера двигуна приводу обертової платформи та контролера двигуна приводу механізму вертикального наведення, виходи яких з'єднані відповідно з двигунами приводів обертання платформи та механізму вертикального наведення антени, а вхід-вихід процесора рухомої платформи з'єднаний з безконтактним направленим відгалужувачем, а блок стабілізаторів живлення обертової платформи з'єднаний з безконтактним направленим відгалужувачем.
Текст
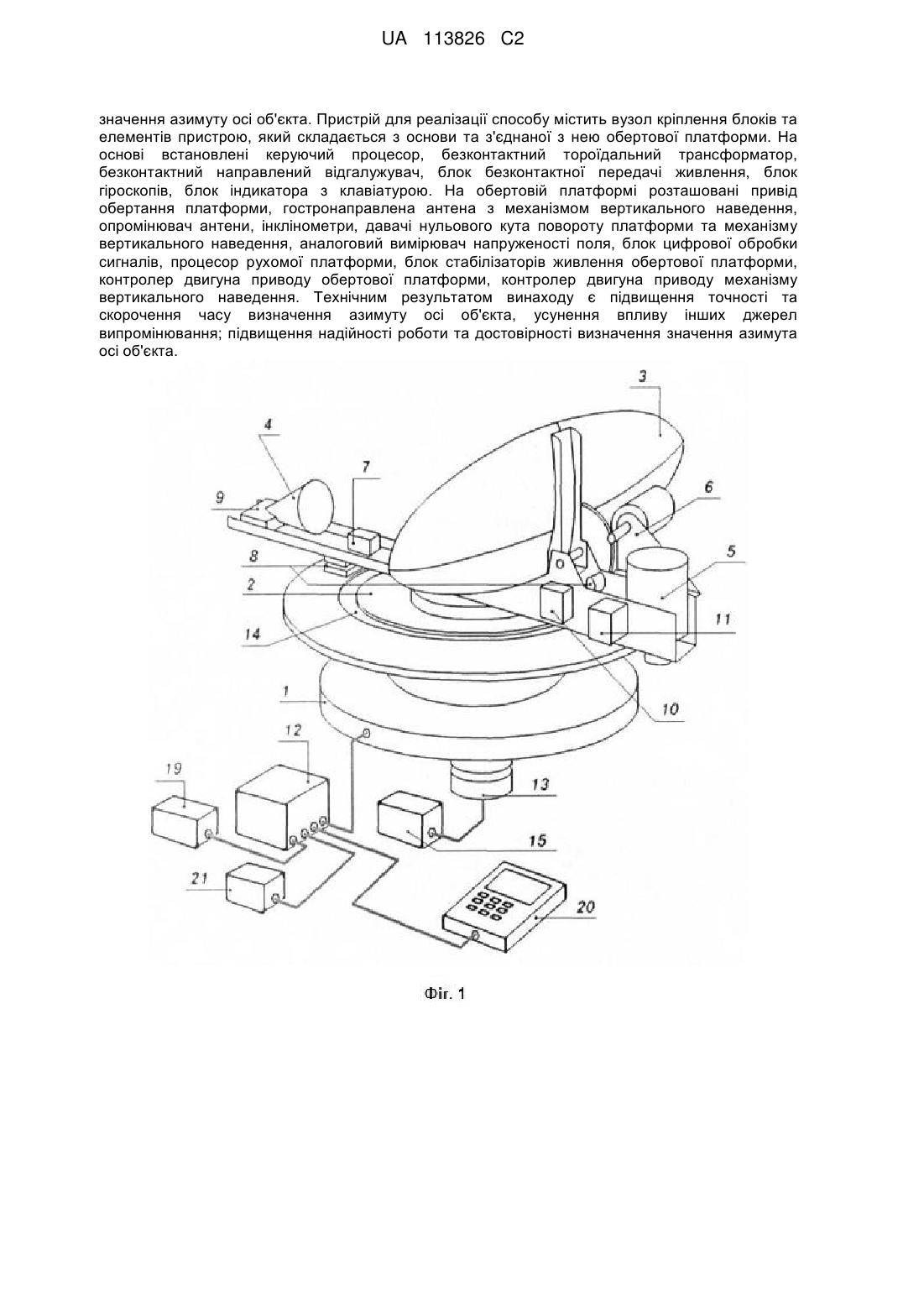
Реферат: Винахід належить до радіопеленгаційних систем вимірювання азимута і може бути використаний при розробці, виготовленні та експлуатації систем навігації, топографічної прив'язки, наведенні та прицілюванні для наземної техніки. Cпосіб визначення азимуту осі об'єкта включає радіопеленгацію супутника та визначення його координат у системі координат, зв'язаній з об'єктом за допомогою гостронаправленої антени, що знаходиться на обертовій платформі. Також визначають сигнатуру супутника, а за його ефемеридами - азимут та висоту над горизонтом. За допомогою давачів кутів повороту платформи та механізму вертикального наведення антени визначають напрями на геостаціонарний супутник відносно осі об'єкта, та за допомогою інклінометрів визначають кути нахилу об'єкта відносно горизонту та обчислюють UA 113826 C2 (12) UA 113826 C2 значення азимуту осі об'єкта. Пристрій для реалізації способу містить вузол кріплення блоків та елементів пристрою, який складається з основи та з'єднаної з нею обертової платформи. На основі встановлені керуючий процесор, безконтактний тороїдальний трансформатор, безконтактний направлений відгалужувач, блок безконтактної передачі живлення, блок гіроскопів, блок індикатора з клавіатурою. На обертовій платформі розташовані привід обертання платформи, гостронаправлена антена з механізмом вертикального наведення, опромінювач антени, інклінометри, давачі нульового кута повороту платформи та механізму вертикального наведення, аналоговий вимірювач напруженості поля, блок цифрової обробки сигналів, процесор рухомої платформи, блок стабілізаторів живлення обертової платформи, контролер двигуна приводу обертової платформи, контролер двигуна приводу механізму вертикального наведення. Технічним результатом винаходу є підвищення точності та скорочення часу визначення азимуту осі об'єкта, усунення впливу інших джерел випромінювання; підвищення надійності роботи та достовірності визначення значення азимута осі об'єкта. UA 113826 C2 5 10 15 20 Винахід належить до радіопеленгаційних систем вимірювання азимута і може бути використаний при розробці, виготовленні та експлуатації систем навігації, топографічної прив'язки, наведенні та прицілюванні для наземної техніки. Відомі способи визначення азимуту та пристрої для їх реалізації (1), (2), (3), які побудовані на основі радіопеленгації небесної сфери за допомогою антен та виявлення за джерелами радіовипромінювання на небесній сфері відповідних супутників, обробка та обчислення отриманих даних з метою визначення азимуту джерела випромінювання та напряму на нього відносно осі об'єкта. Найбільш близьким з вищенаведених, за технічним задумом та суттєвими ознаками, до способу визначення азимуту осі об'єкта та пристрою для його реалізації, що заявляється, є спосіб орієнтування гармати (3), який включає послідовну установку вимірювача, блока обчислення та індикації на гарматі, замір даних вимірювача, розрахунок в блоці обчислення та індикації поточних значень кута азимута і кута місця гармати, індикацію значень кута азимута і кута місця, розворот гармати до необхідних значень кутів наведення по азимуту і місцю, встановлення вимірювача у вигляді двох антен супутникової навігаційної системи на гарматі паралельно осі візування гармати з напрямком антен в верхню півсферу, при цьому вимір координат розташування антен здійснюють з частотою 1 Гц, а розрахунок в блоці обчислення та індикації виконують по виміряних координатах розташування антен. Крім того, розрахунок поточних значень кутів азимута та місця здійснюють, наприклад, по залежностях: y y1 z 2 z1 , arctg 2 , arctg x 2 x1 ( x x )2 ( y y )2 2 25 30 35 40 45 50 55 1 2 1 де - поточне значення кута азимута, градус; - поточне значення кута місця, градус; x1 x2, y1 y2, z1 z2 - прямокутні географічні координати розміщення першої та другої антен , , , відповідно, м. А також, індикацію значень кута азимута і кута місця виконують введенням в блок обчислення та індикації необхідних значень кута азимута і кута місця і виконують в блоці обчислення та індикації додатковий розрахунок різниці необхідних і поточних значень кутів азимута і відповідно кутів місця, а індикацію кутів здійснюють у вигляді відхилень поточних значень від необхідних значень кутів азимута і місця. Недоліком вищеописаного способу є низька точність та швидкість вимірювання. Низька швидкість вимірювання обумовлена технічними можливостями супутникової навігаційної системи, вимірювача та блоку обчислень. Низька точність вимірювання обумовлена складністю монтажу супутникової навігаційної системи на гарматі, дотримування паралельності до осі візування гармати з напрямком антен та технічними можливостями супутникової навігаційної системи. Спосіб орієнтування гармати реалізується за допомогою пристрою орієнтування, до складу якого входить вимірювач, блок обчислення та індикації, з'єднаний з вимірювачем кабелем, по якому передаються в блок обчислення та індикації заміряні вимірювачем дані. Живлення пристрою орієнтування здійснюється від блока живлення, розміщеного всередині корпусу блока обчислення та індикації. Вимірювач являє собою двох антенну супутникову навігаційну систему, що закріплюється на гарматі за допомогою вузла кріплення, який містить штангу і кронштейн. Двохантенну супутникову навігаційну систему встановлюють паралельно осі візування гармати з напрямком антен в верхню півсферу. Вимірювач здійснює визначення координат місця розташування антен з частотою 1 Гц. За виміряним координатами розташування антен в блоці обчислення та індикації виконується розрахунок поточних значень кутів азимута та місця, які відображаються на дисплеї блока обчислення та індикації, який кріпиться на гарматі лицьовою стороною до оператора і є легко знімним. Дисплей розташований на лицьовій стороні блока індикації. Недоліком пристрою є складна конструкція, чутливість до механічних навантажень та вібрацій та великі габарити викликані наявністю двох антен супутникової навігаційної системи та вузла кріплення. Крім того, дротове з'єднання блоків між собою та блоком живлення не забезпечує надійність роботи. В основу винаходу поставлено задачу удосконалити спосіб визначення азимуту осі об'єкта шляхом проведення радіопеленгації за сигналами, щонайменше одного геостаціонарного супутника, визначення його сигнатури та за ефемеридами його азимуту відносно півночі, а також визначення напрямку на геостаціонарний супутник відносно осі об'єкта за допомогою давачів кутів повороту, та за допомогою інклінометрів - величини кута відхилення об'єкта 1 UA 113826 C2 5 10 15 відносно горизонту, та обчислення значення азимуту напряму осі об'єкта за відповідною формулою, що дозволило б підвищити точність визначення кута азимуту, скоротити час на його визначення, а також покращити надійність роботи. Поставлена задача вирішується тим, що в способі визначення азимуту осі об'єкта, який включає радіопеленгацію небесної сфери за допомогою антени та визначення координат джерела випромінювання у системі координат, зв'язаній з об'єктом, згідно з винаходом, радіопеленгацію проводять за допомогою гостронаправленої антени, що знаходиться на обертовій платформі, встановленій на об'єкті, за сигналами щонайменше одного геостаціонарного супутника визначають сигнатуру супутника та відповідно за ефемеридами супутника визначають його азимут та висоту над горизонтом, за допомогою давачів кутів повороту платформи та механізму вертикального наведення антени визначають напрями на геостаціонарний супутник відносно осі об'єкта, та за допомогою інклінометрів визначають кути нахилу об'єкта відносно горизонту, а обчислення значення азимуту осі об'єкта проводять наступним чином: прямокутні декартові системи координат зв'язують з об'єктом та поверхнею Землі, за показами інклінометрів та давачів кута повороту платформи та механізму вертикального наведення антени визначають кути Ейлера переходу між системами координат, а азимут осі об'єкта обраховують за формулою: A arctg(By / Bx ) , (1) причому значення Bx , By визначаються з матричного рівняння 20 25 30 35 40 45 50 Bx 1 t , By R 0 Bz 0 де матриця R t рівна cos cos sin cos sin sin cos cos cos sin sin sin t R cos sin sin cos cos sin sin cos cos cos sin cos , sin sin cos sin cos а, , , - кути Ейлера переходу між системами координат. Крім того, при радіопеленгації за сигналами щонайменше двох геостаціонарних супутників визначені значення азимутів напряму осі об'єкта усереднюють. А також, як геостаціонарний супутник використовують телевізійний супутник, наприклад, SAT TV. Проведення радіопеленгації за допомогою гостронаправленої антени за сигналами, щонайменше одного геостаціонарного супутника, визначення його сигнатури та відповідно за ефемеридами його азимуту відносно півночі, а також напряму на геостаціонарний супутник відносно осі об'єкта за допомогою давачів кутів повороту, величини кута відхилення об'єкта відносно горизонту за допомогою інклінометрів, та обчислення значення азимуту осі об'єкта шляхом того, що прямокутні декартові системи координат зв'язують з об'єктом та поверхнею Землі, за показами інклінометрів та давачів кута повороту платформи та механізму вертикального наведення антени визначають кути Ейлера переходу між системами координат, а азимут осі об'єкта обраховують за вищенаведеною формулою, дозволяє на порядок підвищити точність та скоротити час визначення азимуту осі об'єкта та усунути вплив інших джерел випромінювання та радіоперешкод в процесі реалізації способу. Обчислення значення азимуту осі об'єкта шляхом зв'язування прямокутних декартових системи координат з об'єктом та поверхнею Землі, та визначення кутів Ейлера переходу між системами координат за показами інклінометрів та давачів кута повороту платформи та механізму вертикального наведення антени, та обрахування азимута осі об'єкта за вищенаведеною формулою, дозволяє підвищити точність та швидкість обчислення. Проведення радіопеленгації за сигналами, щонайменше двох геостаціонарних супутників, азимути яких відомі та розраховані по місцю розміщення об'єкта за ефемеридами визначеного геостаціонарного супутника, дозволяє швидко та високоточно розрахувати азимут осі об'єкта, та шляхом усереднення даних, зменшити похибку, та виключити неточності визначення при можливих виникненнях збоїв в роботі одного із геостаціонарних супутників, та відповідно підвищити надійність способу. Використання як геостаціонарного супутника, одного із телевізійних супутників, наприклад SAT TV, дозволяє за рахунок інформації про точні координати, частоти/сигнатури та нерухомості відносно Землі геостаціонарних супутників, які задіяні під час реалізації способу, підвищити швидкість та точність визначення значення азимута напряму осі об'єкта. 2 UA 113826 C2 5 10 15 20 25 30 35 40 45 50 55 60 Крім того, заявлений спосіб дозволяє також використовувати як джерела випромінювання спеціалізовані супутники та будь-які небесні об'єкти (Сонце, радіогалактики і т.п.), що випромінюють хвилі у радіодіапазоні, що розширює його технічні можливості. В основу винаходу поставлено другу задачу, удосконалити пристрій, який реалізує вищеописаний спосіб вимірювання азимуту осі об'єкта шляхом нового виконання вузла кріплення, введення нових блоків обробки сигналів та керування, а також відповідного бездротового з'єднання їх між собою та бездротового з'єднання їх з блоком живлення, що дозволило б підвищити точність та швидкість вимірювання, надійність роботи. Друга поставлена задача вирішується тим, що в пристрої для реалізації способу визначення азимуту осі об'єкта за п. 1-3, який містить вузол кріплення блоків та елементів пристрою, антену з опромінювачем, блоки керування та обробки сигналів та живлення, згідно з винаходом, вузол кріплення блоків та елементів пристрою складається з основи та з'єднаної з нею обертової платформи, при цьому на основі встановлені керуючий процесор, безконтактний тороїдальний трансформатор, безконтактний направлений відгалужувач, блок безконтактної передачі живлення, блок гіроскопів, блок індикатора з клавіатурою, вхід-вихід якого з'єднаний з керуючим процесором, другий вхід-вихід керуючого процесора з'єднаний з безконтактним направленим відгалужувачем, третій вхід керуючого процесора з'єднаний з виходом блока гіроскопів, а четвертий вхід керуючого процесора з'єднаний з блоком акселерометрів, вихід блока безконтактної передачі живлення з'єднаний з входом безконтактного тороїдального трансформатора, а на обертовій платформі розташовані привід обертання платформи, гостронаправлена антена з механізмом вертикального наведення, опромінювач антени, інклінометри, давачі нульового кута повороту (нульової позиції) платформи та механізму вертикального наведення, аналоговий вимірювач напруженості поля, блок цифрової обробки сигналів, процесор рухомої платформи, блок стабілізаторів живлення обертової платформи, контролер двигуна приводу обертової платформи, контролер двигуна приводу механізму вертикального наведення, при цьому виходи інклінометрів та давачів нульового кута повороту (нульової позиції) платформи та механізму вертикального наведення відповідно з'єднані з входами процесора рухомої платформи, інші входи якого відповідно з'єднані з виходами аналогового вимірювача напруженості поля та блока цифрової обробки сигналів, входи яких з'єднані з опромінювачем антени, а виходи процесора рухомої платформи відповідно з'єднані з входами контролера двигуна приводу обертової платформи та контролера двигуна приводу механізму вертикального наведення, виходи яких з'єднані відповідно з двигунами приводів обертання платформи та механізму вертикального наведення антени, вхід-вихід процесора рухомої платформи з'єднаний з безконтактним направленим відгалужувачем, а блок стабілізаторів живлення обертової платформи з'єднаний з безконтактним тороїдальним трансформатором. Конструкція вузла кріплення блоків та елементів пристрою у вигляді основи та з'єднаної з нею обертової платформи, на першій з яких встановлені керуючий процесор, безконтактний тороїдальний трансформатор, безконтактний направлений відгалужувач, блок безконтактної передачі живлення, блок гіроскопів, блок індикатора з клавіатурою, а на другій відповідно розташовані привод обертання платформи, гостронаправлена антена з механізмом вертикального наведення, опромінювач антени, інклінометри, давачі нульового кута повороту (нульової позиції) платформи та механізму вертикального наведення, аналоговий вимірювач напруженості поля, блок цифрової обробки сигналів, процесор рухомої платформи, блок стабілізаторів живлення обертової платформи, контролер двигуна приводу обертової платформи, контролер двигуна приводу механізму вертикального наведення, з відповідними зв'язками між блоками, дозволяє підвищити надійність роботи, достовірність визначення значення азимута осі об'єкта. Крім того, бездротове з'єднання блоків між собою та з блоком живлення дозволяє підвищити надійність роботи. Додаткове встановлення на основі вузла кріплення блоків та елементів пристрою блока акселерометрів дозволяє контролювати незмінність положення об'єкта у процесі вимірювань, тим самим забезпечити високу точність визначення значення азимута напряму осі об'єкта. На Фіг. 1 - зображено загальний вигляд пристрою для реалізації способу вимірювання осі азимуту об'єкта; на Фіг. 2 - блок-схема пристрою для реалізації способу вимірювання азимуту осі об'єкта, на Фіг. 3 - діаграма визначення азимуту осі об'єкта . Пристрій для реалізації способу містить (Фіг. 1), основу 1, обертову платформу 2, гостронаправлену антену 3, опромінювач антени 4, привід обертової платформи 5, механізм вертикального наведення антени 6, інклінометри 7, давачі нульового кута повороту (нульової позиції) платформи та механізму вертикального наведення 8, аналоговий вимірювач напруженості поля 9, блок цифрової обробки сигналів 10, процесор рухомої платформи 11, 3 UA 113826 C2 5 10 15 20 25 30 35 40 45 50 55 60 керуючий процесор 12, безконтактний тороїдальний трансформатор 13, безконтактний напрямлений відгалужувач 14, блок безконтактної передачі живлення 15, блок стабілізаторів живлення обертової платформи 16, контролер двигуна приводу обертової платформи 17, контролер двигуна приводу механізму вертикального наведення 18, блок гіроскопів 19, блок індикатора з клавіатурою 20, блок акселерометрів 21, при цьому на основі 1 відповідно встановлені, керуючий процесор 12, безконтактний тороїдальний трансформатор 13, безконтактний направлений відгалужувач 14, блок безконтактної передачі живлення 15, блок гіроскопів 19, блок індикатора з клавіатурою 20 та блок акселерометрів 21, а на обертовій платформі 2 розташовані привід обертання платформи 5, гостронаправлена антена 3 з механізмом вертикального наведення антени 6, опромінювач антени 4, інклінометри 7, давачі нульового кута повороту (нульової позиції) платформи та механізму вертикального наведення 8, аналоговий вимірювач напруженості поля 9, блок цифрової обробки сигналів 10, процесор рухомої платформи 11, блок стабілізаторів живлення обертової платформи 16, контролер двигуна приводу обертової платформи 17, контролер двигуна приводу механізму вертикального наведення 18. Вхід-вихід індикатора з клавіатурою 20 (Фіг. 2), з'єднаний з входом керуючого процесора 12, другий вхід-вихід керуючого процесора 12 з'єднаний з безконтактним направленим відгалужувачем 14, третій вхід керуючого процесора 12 з'єднаний з виходом блока гіроскопів 19, четвертий вхід керуючого процесора 12 з'єднаний з блоком акселерометрів 21, вихід блока безконтактної передачі живлення 15 з'єднаний з входом безконтактного тороїдального трансформатора 13, виходи інклінометрів 7 та давачів нульового кута повороту (нульової позиції) платформи та механізму вертикального наведення 8 відповідно з'єднані з входами процесора рухомої платформи 11, інші входи якого відповідно з'єднані з виходами аналогового вимірювача напруженості поля 9 та блока цифрової обробки сигналів 10, входи яких з'єднані з опромінювачем антени 4, а виходи процесора рухомої платформи 11 відповідно з'єднані з входами контролера двигуна приводу обертової платформи 17 та контролера двигуна приводу механізму вертикального наведення 18, виходи яких з'єднані відповідно з двигунами привода обертання платформи 5 та механізму вертикального наведення антени 6, а вхід-вихід процесора рухомої платформи 11 з'єднаний з безконтактним направленим відгалужувачем 14, а блок стабілізаторів живлення обертової платформи 16 з'єднаний з безконтактним направленим відгалужувачем 14. Гостронаправлена антена 3 механічно з'єднана з механізмом вертикального наведення 6. Спосіб реалізується наступним чином. Після ввімкнення живлення відбувається ініціація процесора рухомої платформи 11 та керуючого процесора 12, самодіагностика всіх вузлів. У разі успішної самодіагностики робота продовжується. Згідно з керуючою програмою обертова платформа 2 здійснює кілька повних обертів при різних положеннях механізму вертикального наведення антени 6. При цьому відбувається калібрування інклінометрів 7, визначення нуль-позицій та попереднє наближене визначення наявності джерел радіовипромінювання на небесній сфері за допомогою аналогового вимірювача напруженості поля 9. Далі уточнюється положення джерел радіовипромінювання на небесній сфері за допомогою аналогового вимірювача напруженості поля 9, шляхом багатократного сканування і усереднення результатів. Після цього визначають сигнатури сигналів (приналежність до певного джерела) за допомогою блоку цифрової обробки сигналів 10, відбувається прецизійне сканування та пеленгування джерел сигналу з конкретними сигнатурами, розраховують азимути джерел сигналів за їх відомими ефемеридами та відомими координатами об'єкта та розраховують азимут осі об'єкта за формулою (1). Потім перевіряють незмінність нуль-позиції (відсутність збоїв напрямку) за допомогою повторного визначення нуль-позиції обертової платформи 2 та механізму вертикального наведення антени 6. Також перевіряють незмінність положення об'єкта протягом вимірювань за допомогою блока акселерометрів. Дані для багатьох джерел обробляють (усереднюють) та приймається рішення про достовірність даних на основі програмного фільтру Калмана. Дані про азимут видають для подальшого використання. Сигнал, прийнятий гостронаправленою антенною 3, подається на вхід аналогового вимірювача напруженості поля 9 та блоку цифрової обробки сигналів 10, а на аналоговий вхід процесора рухомої платформи 11 подається сигнал з виходу аналогового вимірювача напруженості поля 9. Цифровий сигнал з виходу блоку цифрової обробки сигналів 10 за допомогою інтерфейсу подається на процесор рухомої платформи 11, на який також поступають сигнали з інклінометрів 7 та давачів нульового кута повороту (нульової позиції) платформи та вертикального наведення 8. З процесора рухомої платформи 11 поступають сигнали на 4 UA 113826 C2 5 10 15 20 25 30 35 40 45 керування контролерами двигуна приводів обертової платформи 17 та механізм вертикального наведення антени 6. Між керуючим процесором 12 та процесором рухомої платформи 11 відбувається двосторонній обмін сигналами за допомогою інтерфейсу та безконтактного напрямленого відгалужувача 14. Керуючий процесор 12, крім того, отримує сигнали з клавіатури та передає на індикатор блока індикатора і клавіатури 20, а також отримує дані з блока гіроскопів 19. Для математично обчислення азимута осі об'єкта введені наступні позначення XYZ - декартова прямокутна система координат, зв'язана з Землею - зональна плоска геодезична система координат. Початок системи координат - точка місцезнаходження об'єкта. Вісь ОХ спрямована на Північ, вісь OY - на Захід, вісь OZ - вгору по істинній вертикалі. Права трійка. X1Y1Z1 - декартова прямокутна система координат, зв'язана з об'єктом. Початок системи координат - точка перетину осі платформи та осі вертикального повороту антени. Вісь ОX1 спрямована вздовж будівельної горизонталі об'єкта, вісь ОY1 - вліво по ходу переважаючого напрямку руху об'єкта, вісь ОZ1 утворює з попередніми праву трійку. Сферична система координат, зв'язана з об'єктом. Початок системи координат - точка перетину осі платформи та осі вертикального повороту антени. аz1 - невиправлений курсовий кут - кут між напрямком осі ОX1 та проекцією радіус - вектора А джерела випромінювання на площину X1ОY1 (покази давача кута повороту платформи, виправлені на положення нуль-пункта). h1 - невиправлена висота - кут між радіус-вектором А джерела випромінювання та площиною X1OY1 (покази давача кута вертикального повороту антени). Сферична система координат, зв'язана з Землею - горизонтальна топоцентрична система небесних координат. az - азимут (визначається з ефемерид) h - висота (визначається з ефемерид) Початок системи координат - точка місцезнаходження об'єкта на поверхні Землі. Еклерові кути переходу між системами координат XYZ та X1Y1Z1. - кут прецесії - кут нутації - кут власного обертання Азимут осі об'єкта Az_obj - кут між проекцією одиничного вектора (1,0,0) системи X1Υ1Ζ1 на площину ΧΟΥ та віссю ОХ системи ΧΥΖ. За допомогою обробки сигналів інклінометрів знаходимо напрямок проекції істинної вертикалі на площину Χ1ΟΥ1 та визначаємо кут власного обертання Μ та кут нутації 1. Знаходимо координати одиничного радіус-вектора джерела А у системі Χ1Υ1Ζ1 A X1 cos(h1) cos(az1) , A Y1 cos(h1) sin( az1) , A Z1 sin( h1) . Знаходимо координати одиничного радіус-вектора джерела А у системі XYZ A X cos(h) cos(az ) , A Y cos(h) sin( az ) , A Z sin( h) . Знаходимо матрицю переходу R між системами XYZ та X1Y1Z1 cos sin sin cos cos sin sin cos cos sin cos sin R sin cos cos cos sin sin sin cos cos cos cos sin . sin sin sin cos cos Записуємо координати радіус-вектора А у системі X1Y1Z1 через його координати у системі XYZ та матрицю переходу 5 UA 113826 C2 cos sin sin cos cos sin sin cos(h1) cos(az1) cos cos sin cos sin cos(h1) sin( az1) sin cos cos cos sin sin sin cos cos cos cos sin sin( h1) sin sin sin cos cos 5 10 . cos(h) cos(az ) cos(h) sin( az ) sin( h) Шляхом розв'язку системи трансцендентних рівнянь системи (1) знаходимо кут прецесії Q та уточнюємо значення кутів 1 та М. Знаходимо уточнену матрицю зворотного переходу R t між системами X1Y1Z1 тa XYZ cos cos sin cos sin sin cos cos cos sin sin sin t R cos sin sin cos cos sin sin cos cos cos sin cos . sin sin cos sin cos Знаходимо координати Bx , By , Bz одиничного вектора (1,0,0) системи X1Y1Z1 у системі XYZ Bx 1 t . By R 0 Bz 0 І знаходимо азимут осі об'єкта Az _ obj arctg(By / Bx ) . Джерела інформації: 1. Заявка JP № 2001166030, МПК: G01С21/00; G01S19/54; G01S7/03; 2001 2. Патент РФ № 2010100521, МПК: F41G3/00, 20.07.2011 3. Патент РФ № 2466343, МПК: F41G3/00, G01C21/24, 10.11.2012. 15 ФОРМУЛА ВИНАХОДУ 20 25 30 1. Спосіб визначення азимуту осі об'єкта, який включає радіопеленгацію джерела випромінювання за допомогою антени та визначення його координат у системі координат, зв'язаній з об'єктом, який відрізняється тим, що радіопеленгацію проводять за допомогою гостронаправленої антени, що знаходиться на обертовій платформі, встановленій на об'єкті, за сигналами щонайменше одного геостаціонарного супутника визначають сигнатуру супутника та відповідно за ефемеридами супутника визначають його азимут та висоту над горизонтом, за допомогою давачів кутів повороту платформи та механізму вертикального наведення антени визначають напрями на геостаціонарний супутник відносно осі об'єкта, та за допомогою інклінометрів визначають кути нахилу об'єкта відносно горизонту, а обчислення значення азимуту осі об'єкта проводять наступним чином: з об'єктом та поверхнею Землі зв'язують прямокутні декартові системи координат, за показами інклінометрів та давачів кута повороту платформи та механізму вертикального наведення антени визначають кути Ейлера переходу між системами координат, а азимут осі об'єкта обраховують за формулою: A arctg(By / Bx ) , (1) причому значення Bx , By визначаються з матричного рівняння 35 Bx t By R Bz 1 0 , 0 де матриця R t рівна cos cos sin cos sin sin cos cos cos sin sin sin t R cos sin sin cos cos sin sin cos cos cos sin cos , sin sin cos sin cos а , , - кути Ейлера переходу між системами координат. 6 UA 113826 C2 5 10 15 20 25 30 2. Спосіб визначення азимуту осі об'єкта за п. 1, який відрізняється тим, що при радіопеленгації за сигналами, щонайменше двох геостаціонарних супутників, визначені значення азимутів осі об'єкта усереднюють. 3. Спосіб визначення азимуту осі об'єкта за пп. 1, 2, який відрізняється тим, що як геостаціонарний супутник використовують телевізійний супутник. 4. Пристрій для реалізації способу визначення азимуту осі об'єкта за пп. 1-3, який містить вузол кріплення блоків та елементів пристрою, антену з опромінювачем, блоки керування та обробки сигналів та живлення, який відрізняється тим, що вузол кріплення блоків та елементів пристрою складається з основи та з'єднаної з нею обертової платформи, при цьому на основі встановлені керуючий процесор, безконтактний тороїдальний трансформатор, безконтактний направлений відгалужувач, блок безконтактної передачі живлення, блок акселерометрів, блок гіроскопів, блок індикатора з клавіатурою, вхід-вихід якого з'єднаний з керуючим процесором, другий вхід-вихід керуючого процесора з'єднаний з безконтактним направленим відгалужувачем, третій вхід керуючого процесора з'єднаний з виходом блока гіроскопів, а четвертий вхід керуючого процесора з'єднаний з блоком акселерометрів, вихід блока безконтактної передачі живлення з'єднаний з входом безконтактного тороїдального трансформатора, а на обертовій платформі розташовані привод обертання платформи, гостронаправлена антена з механізмом вертикального наведення, опромінювач антени, інклинометри, давачі нульового кута повороту, тобто, нульової позиції платформи та механізму вертикального наведення, аналоговий вимірювач напруженості поля, блок цифрової обробки сигналів, процесор рухомої платформи, блок стабілізаторів живлення обертової платформи, контролер двигуна приводу обертової платформи, контролер двигуна приводу механізму вертикального наведення, при цьому виходи інклінометрів та давачів нульового кута повороту, тобто, нульової позиції платформи та механізму вертикального наведення відповідно з'єднані з входами процесора рухомої платформи, інші входи яких відповідно з'єднані з виходами аналогового вимірювача напруженості поля та блока цифрової обробки сигналів, входи яких з'єднані з опромінювачем антени, а виходи процесора рухомої платформи відповідно з'єднані з входами контролера двигуна приводу обертової платформи та контролера двигуна приводу механізму вертикального наведення, виходи яких з'єднані відповідно з двигунами приводів обертання платформи та механізму вертикального наведення антени, а вхід-вихід процесора рухомої платформи з'єднаний з безконтактним направленим відгалужувачем, а блок стабілізаторів живлення обертової платформи з'єднаний з безконтактним направленим відгалужувачем. 7 UA 113826 C2 8 UA 113826 C2 9 UA 113826 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 19/54, G01S 13/00, F41G 3/00, G01S 19/18, G01S 13/06
Мітки: пристрій, азимуту, об'єкта, осі, спосіб, визначення, реалізації
Код посилання
<a href="https://ua.patents.su/12-113826-sposib-viznachennya-azimutu-osi-obehkta-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення азимуту осі об’єкта та пристрій для його реалізації</a>
Пристрій для визначення азимуту
Номер патенту: 8693
Опубліковано: 15.08.2005
Автори: Леоненко Сергій Миколайович, Макарчук Володимир Федорович, Шкляр Володимир Петрович, Шервашидзе Володимир Варламович
МПК: G01P 9/00
Мітки: азимуту, пристрій, визначення
Формула / Реферат:
1. Пристрій для визначення азимуту, що містить три датчики кутової швидкості із взаємно ортогональними вимірювальними осями та три акселерометри із взаємно ортогональними вимірювальними осями, блок керування і обчислення азимуту, що в свою чергу містить блок керування та спецобчислювач, у якому вимірювальні осі датчиків кутової швидкості та акселерометрів попарно колінеарні відповідним осям опорної прямокутної системи координат, жорстко...
Спосіб визначення орієнтації рухомого об’єкта та пристрій для його реалізації
Номер патенту: 105626
Опубліковано: 10.06.2014
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: G05D 3/00
Мітки: спосіб, пристрій, реалізації, орієнтації, об'єкта, визначення, рухомого
Формула / Реферат:
1. Спосіб визначення орієнтації рухомого об'єкта, коли на рухомому об'єкті розміщують реперні елементи контрольовано відносно вектора орієнтації рухомого об'єкта, а за допомогою оптико-локаційного засобу, що складається з М2 оптико-електронних локаційних блоків, розміщеного на нерухомому об'єкті, проводять виміри сигналів, що характеризують просторове положення реперних...
Спосіб визначення орієнтації рухомого об’єкта та пристрій для його реалізації
Номер патенту: 107105
Опубліковано: 25.11.2014
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: G01B 11/26, G05D 3/00
Мітки: об'єкта, визначення, орієнтації, пристрій, рухомого, спосіб, реалізації
Формула / Реферат:
1. Спосіб визначення орієнтації рухомого об'єкта відносно нерухомого об'єкта, коли здійснюють сканування пучком випромінювання, джерело якого встановлено на одному з об'єктів, вимірюють кутове положення пучка випромінювання, коли він засвітлює детектори випромінювання, встановлені на іншому об'єкті і використовуючи виміряні кути визначають орієнтацію рухомого об'єкта, який відрізняється тим, що сканування проводять шляхом змінення...
Спосіб безконтактного визначення струмів у підземних трубопроводах і пристрій для його реалізації
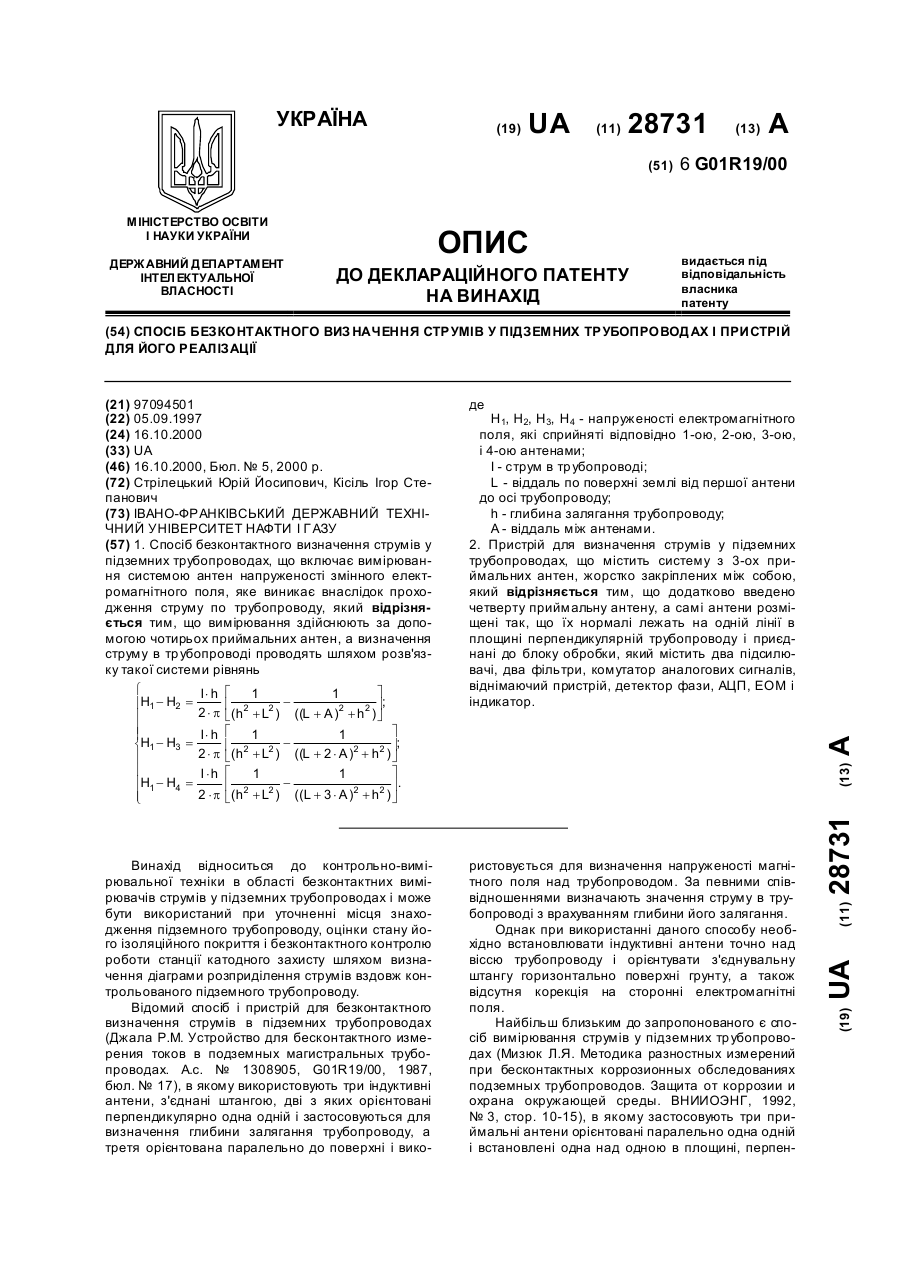
Номер патенту: 28731
Опубліковано: 16.10.2000
Автори: Стрілецький Юрій Йосипович, Кисіль Ігор Степанович
МПК: G01R 19/145, G01R 19/00, G01R 29/08
Мітки: реалізації, спосіб, пристрій, визначення, струмів, підземних, трубопроводах, безконтактного
Формула / Реферат:
1. Спосіб безконтактного визначення струмів у підземних трубопроводах, що включає вимірювання системою антен напруженості змінного електромагнітного поля, яке виникає внаслідок проходження струму по трубопроводу, який відрізняється тим, що вимірювання здійснюють за допомогою чотирьох приймальних антен, а визначення струму в трубопроводі проводять шляхом розв'язку такої системи рівнянь
Спосіб визначення орієнтації осі візира і пристрій для його реалізації
Номер патенту: 47972
Опубліковано: 15.07.2004
Автори: Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович, Черняк Сергій Іванович
МПК: F41G 3/22
Мітки: реалізації, візира, осі, визначення, спосіб, пристрій, орієнтації
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, що включає сканування простору розміщення нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів та положення n випромінюючих діодів у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розміщені випромінюючі діоди, який відрізняється тим, що сканують просторову площину...
Попередній патент: Спосіб виконання складових конструктивних елементів та монтажу просторової мобільної каркасно-модульної торгівельно-виставкової системи за рибаком
Наступний патент: Аксіальна електронна гармата
Випадковий патент: Фільтр для очистки води