Спосіб визначення орієнтації рухомого об’єкта та пристрій для його реалізації
Формула / Реферат
1. Спосіб визначення орієнтації рухомого об'єкта відносно нерухомого об'єкта, коли здійснюють сканування пучком випромінювання, джерело якого встановлено на одному з об'єктів, вимірюють кутове положення пучка випромінювання, коли він засвітлює детектори випромінювання, встановлені на іншому об'єкті і використовуючи виміряні кути визначають орієнтацію рухомого об'єкта, який відрізняється тим, що сканування проводять шляхом змінення положення пучка випромінювання на дискретні кути, з одночасною реєстрацією інтенсивності опромінювання детектора випромінювання, дані якого використовують при визначенні кутової орієнтації скануючого пучка.
2. Спосіб по п. 1, який відрізняється тим, що при засвіченні детекторів випромінювання змінюють просторову орієнтацію пучка випромінювання на дискретні кути, розмір яких менше, ніж апертурний кут пучка випромінювання.
3. Спосіб по п. 1, який відрізняється тим, що використовують для формування скануючого випромінювання матричний індикатор та сканування забезпечують за рахунок переключення чарунок індикатора.
4. Пристрій визначення орієнтації рухомого об'єкта відносно нерухомого об'єкта, що має в своєму складі встановлені на одному об'єкті M джерел скануючого випромінювання, де M≥1, а на другому об'єкті N детекторів випромінювання, де N≥1, які з'єднані з обчислювачем визначення кутів просторової орієнтації осі джерела випромінювання, який відрізняється тим, що джерело скануючого випромінювання виконано з можливістю змінення просторової орієнтації пучка випромінювання на дискретні кути, а склад пристрою доповнено блоком аналізу засвічення детекторів випромінювання та блоком керування режимами формування дискретних кутів просторової орієнтації пучка випромінювання, які з'єднані відповідно з детекторами випромінювання та джерелами випромінювання, а також проміж собою та з обчислювачем визначення кутів просторової орієнтації осі джерела випромінювання.
5. Пристрій по п. 4, який відрізняється тим, що джерело скануючого випромінювання має в своєму складі оптично сполучені оптичний вузол та матричний індикатор, вхід якого є вхід джерела випромінювання.
6. Пристрій по п. 5, який відрізняється тим, що матричний індикатор виконаний як матриця елементів з керованою оптичною прозорістю та джерела випромінювання, які послідовно оптично сполучені.
Текст
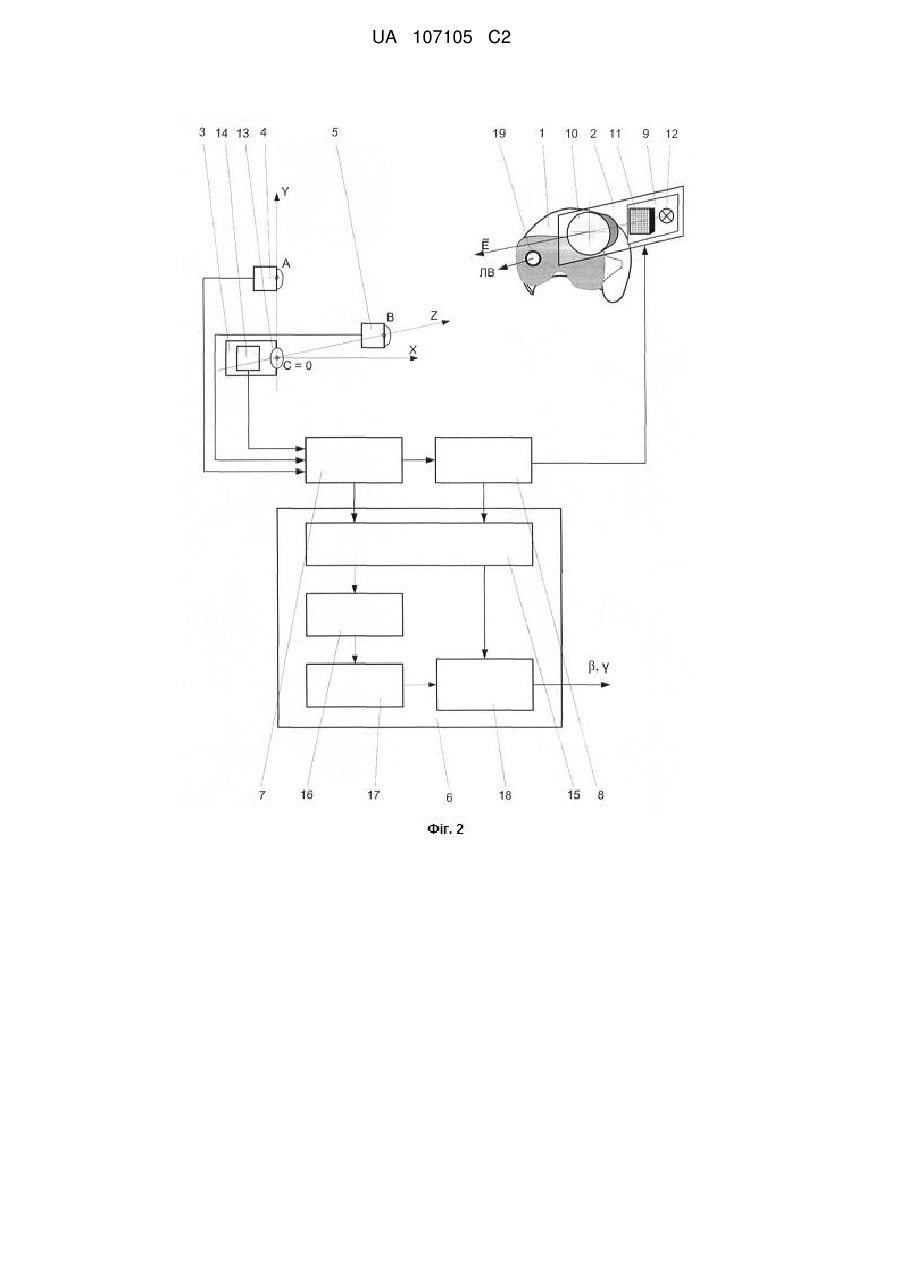
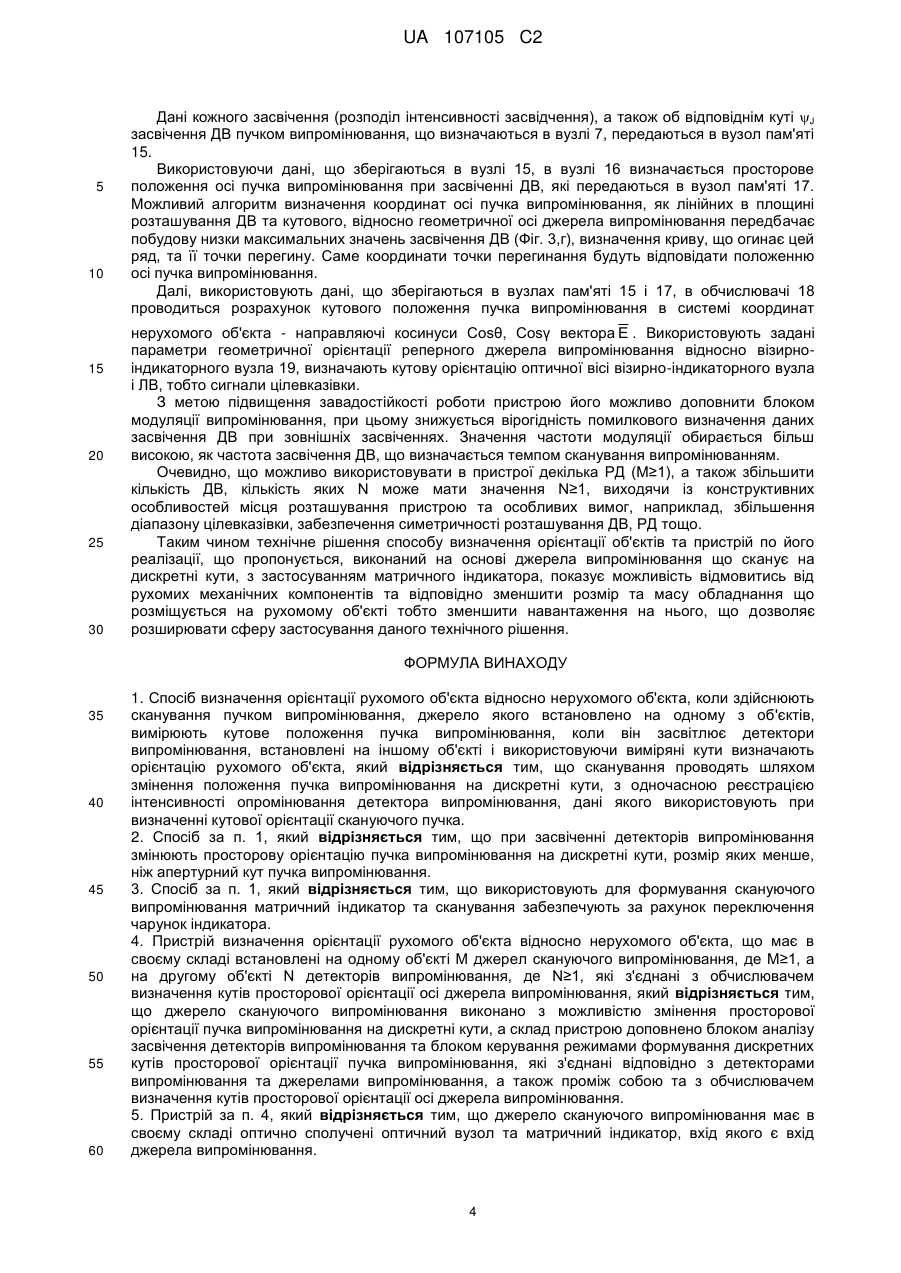
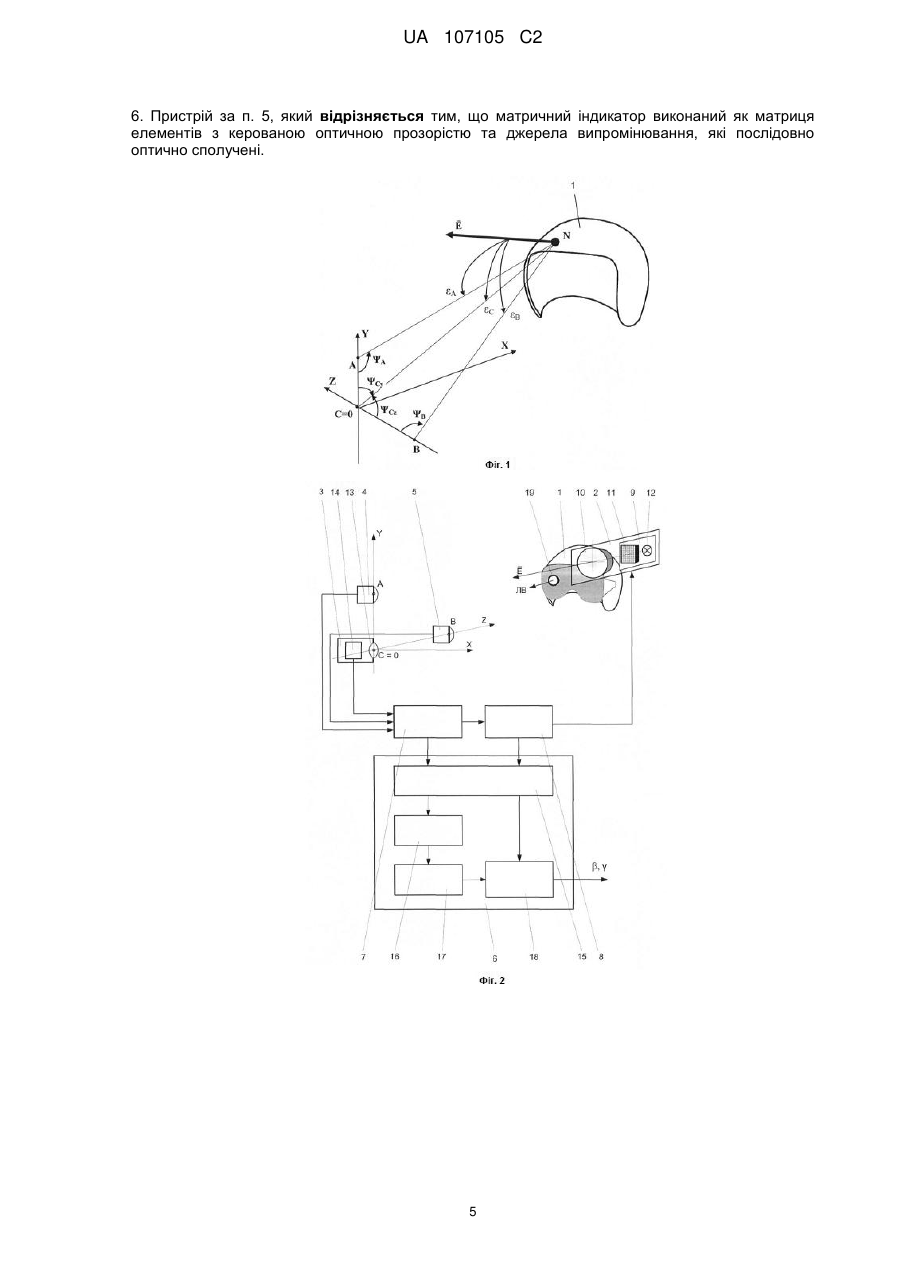
Реферат: Винахід належить до галузі спеціального оптичного приладобудування, і зокрема до систем дистанційного визначення орієнтації рухомих об'єктів та може бути використано при створенні систем робототехніки, а саме пристроїв, що визначають положення робочого органу маніпуляторів, а також систем управління, де використовуються дані про розвороти голови оператора, систем візуалізації тренажерів на основі нашоломного індикатора, систем віртуальної реальності і т.п. Спосіб визначення орієнтації рухомого об'єкта передбачає сканування пучками випромінювання об'єктів з детекторами випромінювання, коли сканування проводять змінюючи положення осі оптичного пучка на дискретні кути, які при засвіченні детекторів випромінювання встановлюють меншими, ніж кутова апертура пучка випромінювання, та визначають кутове положення осі скануючого пучка випромінювання, враховуючи розподіл інтенсивності засвічення детекторів випромінювання, що призводить до зниження навантаження вимірювального обладнання на рухомий об′єкт та зменшення кількості рухомих детекторів випромінювання. UA 107105 C2 (12) UA 107105 C2 UA 107105 C2 5 10 15 20 25 30 35 40 45 50 55 Дане технічне рішення належить до галузі спеціального оптичного приладобудування, і зокрема до систем дистанційного визначення орієнтації рухомих об'єктів та може бути використано при створенні систем робототехніки, а саме пристроїв, що визначають положення робочого органу маніпуляторів, а також систем управління, де використовуються дані про розвороти голови оператора, систем візуалізації тренажерів на основі нашоломного індикатора, систем віртуальної реальності і т.п. В теперішній час широко застосовуються для наведення різних керованих підсистем, перемикання органів управління без застосування рук за рахунок використання даних про розвороти голови оператора, так названі - нашоломні системи цілевказівки. Ці системи базуються на пристроях дистанційного визначення орієнтації рухомих об'єктів. В основному оптичні пристрої дистанційного визначення орієнтації рухомих об'єктів містять реперні джерела випромінювання (РД), розміщені на рухомому об'єкті та детектори випромінювання (ДВ), розміщені на нерухомому (базовому) об'єкті, відносно якого проводиться визначення орієнтації рухомого об'єкта. За допомогою сигналів від ДВ визначають напрямки (кути-пеленги) на кожне РД, використовують які визначають орієнтацію рухомого об'єкта. В класичній тріангуляційній схемі побудови пристроїв визначення орієнтації рухомих об'єктів вимірюють кути-пеленги РД с двох точок, що віднесені друг від друга на відому відстань, потім визначають координати РД та орієнтацію рухомого об'єкта. Наприклад, патенти США №4193689, №4209254; Великобританії №2002968, №1520154. Взагалі огляд простору в системах сканування вузьким полем виконується за допомогою обертання або качання дзеркал, призм або об'єктивів, а також руху діафрагм та шпарин (М.М.Мирошников. Теоретические основы оптико-электронных приборов. Ленинград. Машиностроение. Ленинградское отделение. 1977г., стр.26) Відомі спосіб та пристрій визначення орієнтації об'єктів при використанні одного джерела випромінювання на рухомому об'єкті, а на нерухомій базі встановлені 4 фотодетектори. Вказані спосіб та пристрій, що приймаються за прототип, реалізовані згідно з патентом РФ №2092788. Даним патентом передбачається наступний спосіб визначення координат РД: випромінювання РД формують в кільцевій конічній зоні, вісь якої суміщена з вектором напрямку орієнтації об'єкта та циклічно змінюють кут при вершині конуса, тим самим сканують простір знаходження ДВ; при опроміненні ДВ, виділяють середину імпульсу фотоструму визначають відповідне кутове положення осі пучка випромінювання (кут при вершині конуса); по отриманих даних, з врахуванням кутів опромінення ДВ визначають кутову орієнтацію осі джерела випромінювання, а також рухомого об'єкта; В такому пристрої передбачається побудова РД з формуванням випромінювання в кільцевій конусній зоні з безперервним зміненням кута при вершині конуса, що являє собою складний пристрій з рухомими деталями. Такий пристрій має габарити та масу, що обмежують його розміщення на рухомому об'єкті (наприклад, шоломі оператора). А використання вихідного торця оптичного джгута волокон як формувача конусного випромінювання з розміщенням блока підсвічування його вхідного торця на нерухомому блоці також проблематично, так як оптичний джгут має властивість симетризації світла тільки на малій довжині. Задача способу та пристрою, що пропонується, по дистанційному визначенню орієнтації рухомого об'єкта є зниження навантаження вимірювального обладнання на рухомий об'єкт за рахунок усунення необхідності використовувати рухомі механічні деталі та зменшення кількості необхідних ДВ. Суть технічного рішення, що пропонується, полягає в новому наборі дій по реалізації метода сканування, визначенні кутової орієнтації осі пучка випромінювання, що засвідчує ДВ з метою зменшення габаритів та маси обладнання, що означає також зменшення його навантаження на рухомий об'єкт. Поставлена задача вирішується за рахунок того, що в відомому способі сканування пучками випромінювання об'єкта з ДВ, випромінювання формують як пучок випромінювання з відомим розподілом інтенсивності в діаграмі випромінювання, а сканування проводять змінюючи положення осі оптичного пучка на дискретні кути, розмір яких, при засвіченні ДВ, встановлюють менше, ніж розмір кутової апертури оптичного пучка, та визначають кутове положення осі скануючого оптичного пучка враховуючи розподіл інтенсивності засвічення ДВ. Пристрій, що пропонується, має в своєму складі джерело випромінювання, що виконано з можливістю змінення кутового напрямку осі пучка випромінювання на дискретні кути відносно осі джерела випромінювання, а також блок аналізу засвічення ДВ і блок керування режимами формування дискретних кутів просторової орієнтації пучка випромінювання, а джерело випромінювання 1 UA 107105 C2 5 10 15 20 25 30 35 може мати в своєму складі малогабаритний матричний індикатор, розташований в фокальній площині його оптичної системи. Технічне рішення з такою сукупністю ознак як у рішенні, що заявляється, серед відомих в науці та техніці, на даний момент, автором не знайдено. Саме використання нових дій по формуванню скануючого пучка, з можливістю дискретної зміни його кутової орієнтації, визначення кутового положення осі пучка з використанням даних розподілу інтенсивності випромінювання в його апертурному куті, а також використання матричного індикатора при побудові джерела випромінювання, що дозволяє досягнути нових позитивних ознак та поставленої задачі, таким чином технічне рішення відповідає критерію " істотні відміни ". Викладена сукупність ознак серед аналогів не виявлена та в прототипі відсутня, - то запропоноване рішення не очевидно та має ознаки новизни. Викладена суть способу та пристрою, що пропонуються пояснюються наступним описом і кресленнями, де зображені: Фіг. 1 - Геометрична схема визначення кутів розвороту рухомого об'єкта. Фіг. 2 - Блок-схема пристрою визначення кутової орієнтації рухомого об'єкта. Фіг. 3,а - графік розподілу освітлення ДВ. Фіг. 3,б - геометрична схема суміщення плями засвічення з ДВ при зміні кутового положення пучка випромінювання. Фіг. 3,в - амплітуда засвічення ДВ при зміщенні плями засвічення з ДВ. Фіг. 3,г - графік кривій, що огинає сигнали з ДВ. Спосіб визначення кутової орієнтації об'єктів, що пропонується, має наступні дії: орієнтують вісь реперного джерела випромінювання відносно вектора напрямку рухомого об'єкта, орієнтація якого визначається, а ДВ вдовж напрямків координат нерухомого об'єкта, формують випромінювання у вигляді пучка випромінювання з попередньо встановленим розподілом інтенсивності енергії в пучку, сканують простір розміщення ДВ, повертаючи пучок випромінювання на дискретні кути, при засвіченні ДВ, змінюють просторову орієнтацію пучка випромінювання на дискретні кути, розмір яких встановлюють менше ніж апертурний кут пучка випромінювання, визначають положення вісі пучка випромінювання при засвіченні ДВ, використовує дані щодо розподілу інтенсивності енергії в пучку та в інтенсивності освітленості ДВ, використовує дані про положення осі пучка випромінювання, а також дані о розташування ДВ та кути їх засвічення, визначають кутове положення оси джерела випромінювання, які і використовують для розрахунку кутової орієнтації рухомого об'єкта. Геометрична схема визначення кутів розвороту рухомого об'єкта - орієнтації вектора E , який – відповідає направленню орієнтації рухомого об'єкта 1 (наприклад захисного шолома оператора), ілюструє можливість здійснення способу, що пропонується (Фіг. 1). Нерухомий об'єкт представлено як система координат XYZ, на початку якої (точка С), на осі Y (точка А) та Z (точки В) розміщені ДВ. В даній схемі начало вектора E (точка N) розміщено в началі системи координат рухомого об'єкта. 40 В даній геометричній схемі вимірюються кути εJ (де j = А, В, С) між напрямком вектора E і напрямком на ДВ, що розташовані в точках А, В, С на осях Y, Z системи координат нерухомого об'єкта, а також кути ψJ, під якими засвічуються відповідні ДВ. Направляючі косинуси Cosθ, Cosγ вектора E , відносно осей Y, Z визначаються із співвідношення скалярних добутків відповідних векторів. Так направляючий косинус Cosθ 45 визначається із співвідношення скалярних добутків векторів E , AN и E , BN : E , AN =E. AN cos εA 50 E , BN = E. BN cos εв Із цього виразу отримаємо: . . Cos β = Sin ΨСу Cos εA / Sin (ΨА + ΨСу) - Sin ΨА Cos εв /Sin (ΨА + ΨСу); аналогічно визначається направляючий косинус . . Cos γ = - Sin Ψв Cos εс /Sin (Ψв + ΨСу) + Sin ΨCz Соs εD /Sin (Ψв + ΨСz). Можливо також вимірювати два кута в системі координат рухомого об'єкта між напрямком вектора E та напрямком на ДВ, а також два кута між напрямком, під яким засвічується ДВ, в 55 системи координат нерухомого об'єкта, що дозволяє визначити орієнтацію вектора E з застосуванням тільки одного ДВ. Пристрій визначення кутів повороту рухомого об'єкта (наприклад, захисного шолома оператора), блок-схема якого представлена на Фіг. 2, має в своєму складі джерело 2 UA 107105 C2 5 10 15 20 25 30 35 40 45 50 випромінювання 2, розташоване на рухомому об'єкті 1 (захисному шоломі оператора), детектори випромінювання 3, 4, 5 розташовані вдовж напрямків осей системи координат XoY нерухомого об'єкта (оптико-локаційного блока) и блока визначення кутів просторової орієнтації вісі джерела випромінювання 6, а також блок 7 аналізу освітленості ДВ, формуючий також сигнал засвічення детекторів випромінювання та блок 8 керування режимами сканування і формування дискретних кутів просторової орієнтації пучка випромінювання Джерело випромінювання 2 має послідовно розташовані матричний індикатор 9 та оптичну схему 10, що формує пучок випромінювання з заданою кутовою апертурою і розподілом інтенсивності випромінювання в кутовій апертурі. Матричний індикатор 9 може бути виконаний як набір (матриця) світловипромінюючих елементів (наприклад світловипромінюючих діодів), а також як матриця елементів з керованою оптичною прозорістю, наприклад як панель 11 Рідко Кристалічних Елементів, з джерелом підсвічування 12. Детектори випромінювання 3,4,5 мають послідовно розташовані оптичну схему 13 і фотоприймальний вузол 14. Блок 6 визначення кутів просторової орієнтації осі джерела випромінювання має вузол пам'яті 15 даних засвічення ДВ, вузол 16 визначення кутового положення осі пучка випромінювання, вузол 17 пам'яті даних кутового положення осі пучка випромінювання, кутів J и кутів J засвічення ДВ, вузол 18 обчислення кутового положення осі джерела випромінювання. На рухомому об'єкті 1 (захисному шоломі оператора) також розташовано візирно-індикаторний вузол 19, в полі зору якого задається лінія візування (ЛВ) оператора, орієнтацію якої визначають та формують сигнал ціле вказування оператора різним зовнішнім пристроям. Детектори випромінювання 3,4,5 своїми виходами з'єднаний з входами блока аналізу освітленості 7, виходи якого з'єднано з вузлом пам'яті 15 даних засвічення ДВ та вузлом керування 8 режимом сканування пучком випромінювання (режимами випромінювання матричного індикатора), виходи якого з'єднано з входом РД 2, а також через вузол 15 пам'яті даних засвічення ДВ та кутового положення осі пучка випромінювання з'єднаний з обчислювачем 18 кутового положення вісі джерела випромінювання, на другій вхід якого через вузол 17 пам'яті даних положень осей пучків випромінювання приєднано вузол 16 визначення кутового положення осей пучка випромінювання, входи якого з'єднані з виходом вузла 15 пам'яті даних засвічення ДВ. При включенні пристрою, вузол 8 керування скануванням подає сигнал на включення джерела випромінювання 2, де включаються відповідні чарунки матричного індикатора 9 для формування та дискретного кутового переміщення пучка випромінювання на виході РД 2. Розподіл інтенсивності в пучку випромінювання може бути оцінена по розподілу енергії в плямі засвічення в площині розташування ДВ. Як модель розподілу яскравості може бути вибрано рівняння у вигляді гаусоїди обертання, типовий графік розподілу показано на Фіг. 3, а, з умовним радіусом кружка розсіяння R, що описується функцією: (z-z )2-(y-y )2 L=LРДе 0 0 де LРД - енергетична яскравість джерела випромінювання, z0, y0 - координати центра засвічення. При засвіченні ДВ, сигнали фотоприймального вузла 14 надходять в блок 7, де формується сигнал засвічення, який передається в вузол 8 керування, в якому формується сигнал на відповідне управління положенням пучка випромінювання, наприклад поворот його на кути в напрямку збільшення інтенсивності засвічення ДВ, при цьому установлюють розмір кутів менше, ніж апертурний кут пучка випромінювання. Проводиться кількаразове засвічення ДВ, при цьому визначають кут засвічення J, розподіл інтенсивності та максимальний сигнал засвічення. Послідовність можливих засвічень ДВ пучком випромінювання, кутів J+nγ представлена на Фіг. 3,б, а визначені відповідні значення максимальних значень засвічення Li, j представлені на Фіг. 3,в. Як алгоритм визначення координат зображення точкового джерела в площині матричного фотоприймального вузла 14 може бути вибрано метод визначення енергетичного центра зображення. Координати енергетичного центра зображень джерела випромінювання знаходяться по формулам: Z0 55 K 1 P 1(Li,j zi ) i j ; K i1 P 1Li,j j Y0 K 1 P 1(Li,j yi ) i j ; K i1 P 1Li,j j де Li, j - сумарний сигнал от усіх елементів матриці ДВ; К і Р - відповідні числа стовбців и строк матриці; zi і уj - дискретні значення координат елементів вздовж направлення строк и стовбців. 3 UA 107105 C2 5 10 15 20 25 30 Дані кожного засвічення (розподіл інтенсивності засвідчення), а також об відповіднім куті J засвічення ДВ пучком випромінювання, що визначаються в вузлі 7, передаються в вузол пам'яті 15. Використовуючи дані, що зберігаються в вузлі 15, в вузлі 16 визначається просторове положення осі пучка випромінювання при засвіченні ДВ, які передаються в вузол пам'яті 17. Можливий алгоритм визначення координат осі пучка випромінювання, як лінійних в площині розташування ДВ та кутового, відносно геометричної осі джерела випромінювання передбачає побудову низки максимальних значень засвічення ДВ (Фіг. 3,г), визначення криву, що огинає цей ряд, та її точки перегину. Саме координати точки перегинання будуть відповідати положенню осі пучка випромінювання. Далі, використовують дані, що зберігаються в вузлах пам'яті 15 і 17, в обчислювачі 18 проводиться розрахунок кутового положення пучка випромінювання в системі координат нерухомого об'єкта - направляючі косинуси Cosθ, Cosγ вектора E . Використовують задані параметри геометричної орієнтації реперного джерела випромінювання відносно візирноіндикаторного вузла 19, визначають кутову орієнтацію оптичної вісі візирно-індикаторного вузла і ЛВ, тобто сигнали цілевказівки. З метою підвищення завадостійкості роботи пристрою його можливо доповнити блоком модуляції випромінювання, при цьому знижується вірогідність помилкового визначення даних засвічення ДВ при зовнішніх засвіченнях. Значення частоти модуляції обирається більш високою, як частота засвічення ДВ, що визначається темпом сканування випромінюванням. Очевидно, що можливо використовувати в пристрої декілька РД (M≥1), а також збільшити кількість ДВ, кількість яких N може мати значення N≥1, виходячи із конструктивних особливостей місця розташування пристрою та особливих вимог, наприклад, збільшення діапазону цілевказівки, забезпечення симетричності розташування ДВ, РД тощо. Таким чином технічне рішення способу визначення орієнтації об'єктів та пристрій по його реалізації, що пропонується, виконаний на основі джерела випромінювання що сканує на дискретні кути, з застосуванням матричного індикатора, показує можливість відмовитись від рухомих механічних компонентів та відповідно зменшити розмір та масу обладнання що розміщується на рухомому об'єкті тобто зменшити навантаження на нього, що дозволяє розширювати сферу застосування даного технічного рішення. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 60 1. Спосіб визначення орієнтації рухомого об'єкта відносно нерухомого об'єкта, коли здійснюють сканування пучком випромінювання, джерело якого встановлено на одному з об'єктів, вимірюють кутове положення пучка випромінювання, коли він засвітлює детектори випромінювання, встановлені на іншому об'єкті і використовуючи виміряні кути визначають орієнтацію рухомого об'єкта, який відрізняється тим, що сканування проводять шляхом змінення положення пучка випромінювання на дискретні кути, з одночасною реєстрацією інтенсивності опромінювання детектора випромінювання, дані якого використовують при визначенні кутової орієнтації скануючого пучка. 2. Спосіб за п. 1, який відрізняється тим, що при засвіченні детекторів випромінювання змінюють просторову орієнтацію пучка випромінювання на дискретні кути, розмір яких менше, ніж апертурний кут пучка випромінювання. 3. Спосіб за п. 1, який відрізняється тим, що використовують для формування скануючого випромінювання матричний індикатор та сканування забезпечують за рахунок переключення чарунок індикатора. 4. Пристрій визначення орієнтації рухомого об'єкта відносно нерухомого об'єкта, що має в своєму складі встановлені на одному об'єкті M джерел скануючого випромінювання, де M≥1, а на другому об'єкті N детекторів випромінювання, де N≥1, які з'єднані з обчислювачем визначення кутів просторової орієнтації осі джерела випромінювання, який відрізняється тим, що джерело скануючого випромінювання виконано з можливістю змінення просторової орієнтації пучка випромінювання на дискретні кути, а склад пристрою доповнено блоком аналізу засвічення детекторів випромінювання та блоком керування режимами формування дискретних кутів просторової орієнтації пучка випромінювання, які з'єднані відповідно з детекторами випромінювання та джерелами випромінювання, а також проміж собою та з обчислювачем визначення кутів просторової орієнтації осі джерела випромінювання. 5. Пристрій за п. 4, який відрізняється тим, що джерело скануючого випромінювання має в своєму складі оптично сполучені оптичний вузол та матричний індикатор, вхід якого є вхід джерела випромінювання. 4 UA 107105 C2 6. Пристрій за п. 5, який відрізняється тим, що матричний індикатор виконаний як матриця елементів з керованою оптичною прозорістю та джерела випромінювання, які послідовно оптично сполучені. 5 UA 107105 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 3/00, G01B 11/26
Мітки: спосіб, визначення, орієнтації, пристрій, рухомого, об'єкта, реалізації
Код посилання
<a href="https://ua.patents.su/8-107105-sposib-viznachennya-oriehntaci-rukhomogo-obehkta-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення орієнтації рухомого об’єкта та пристрій для його реалізації</a>
Спосіб визначення орієнтації рухомого об’єкта та пристрій для його реалізації
Номер патенту: 105626
Опубліковано: 10.06.2014
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: G05D 3/00
Мітки: пристрій, орієнтації, об'єкта, спосіб, реалізації, рухомого, визначення
Формула / Реферат:
1. Спосіб визначення орієнтації рухомого об'єкта, коли на рухомому об'єкті розміщують реперні елементи контрольовано відносно вектора орієнтації рухомого об'єкта, а за допомогою оптико-локаційного засобу, що складається з М2 оптико-електронних локаційних блоків, розміщеного на нерухомому об'єкті, проводять виміри сигналів, що характеризують просторове положення реперних...
Спосіб визначення орієнтації осі візира і пристрій для його реалізації
Номер патенту: 47972
Опубліковано: 15.07.2004
Автори: Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович, Черняк Сергій Іванович
МПК: F41G 3/22
Мітки: визначення, осі, орієнтації, реалізації, візира, пристрій, спосіб
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, що включає сканування простору розміщення нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів та положення n випромінюючих діодів у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розміщені випромінюючі діоди, який відрізняється тим, що сканують просторову площину...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказування для його реалізації
Номер патенту: 47969
Опубліковано: 15.09.2003
Автори: Кадочніков Сергій Михайлович, Черняк Сергій Іванович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: візира, нашоломна, реалізації, осі, цілевказування, система, спосіб, визначення, орієнтації
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказівки для його реалізації
Номер патенту: 47969
Опубліковано: 15.07.2002
Автори: Черняк Сергій Іванович, Кадочніков Сергій Михайлович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: реалізації, спосіб, візира, цілевказівки, система, орієнтації, нашоломна, визначення, осі
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Спосіб визначення кристалографічної орієнтації монокристала
Номер патенту: 88419
Опубліковано: 12.10.2009
Автори: Данільченко Віталій Юхимович, Бондар Володимир Йосипович, Кондратьєв Сергій Павлович
МПК: G01N 23/20
Мітки: кристалографічно, визначення, спосіб, орієнтації, монокристала
Формула / Реферат:
Спосіб визначення кристалографічної орієнтації монокристала, який включає нерухоме закріплення монокристала в гоніометричній головці рентгенівської камери обертання, опромінення монокристала пучком немонохроматизованих характеристичних рентгенівських променів, реєстрацію дифракційної картини монокристала, що обертається, побудову його полюсної фігури і визначення кутового положення кристалографічних площин, який відрізняється тим, що...
Попередній патент: Пристрій і спосіб для обробки відхідного газу
Наступний патент: Уретани, сечовини, аміди та родинні інгібітори фактора xа
Випадковий патент: Корозійностійкий високотемпературний композиційний матеріал системи zrb2-sic