Пристрій для визначення азимуту
Номер патенту: 8693
Опубліковано: 15.08.2005
Автори: Леоненко Сергій Миколайович, Шервашидзе Володимир Варламович, Шкляр Володимир Петрович, Макарчук Володимир Федорович
Формула / Реферат
1. Пристрій для визначення азимуту, що містить три датчики кутової швидкості із взаємно ортогональними вимірювальними осями та три акселерометри із взаємно ортогональними вимірювальними осями, блок керування і обчислення азимуту, що в свою чергу містить блок керування та спецобчислювач, у якому вимірювальні осі датчиків кутової швидкості та акселерометрів попарно колінеарні відповідним осям опорної прямокутної системи координат, жорстко зв'язаної з об'єктом, азимут якого підлягає вимірюванню, у якому виходи блоку керування з'єднані із входами датчиків кутової швидкості, акселерометрами та спецобчислювача, вхід блоку керування з'єднаний з виходом спецобчислювача, входи спецобчислювача з'єднані з виходами датчиків кутової швидкості та акселерометрів, який відрізняється тим, що до нього введено блок введення констант, компаратор та блоки визначення широти місця експлуатації, модулів кутової швидкості обертання Землі, прискорення сили тяжіння Землі, причому вхід спецобчислювача з'єднаний з компаратором, входи блоку обчислення модуля кутової швидкості обертання Землі з'єднані з виходами датчиків кутової швидкості, входи блоку обчислення модуля прискорення сили тяжіння Землі з'єднані з виходами акселерометрів, вхід блоку обчислення широти місця експлуатації приладу з'єднаний з виходом спецобчислювача, входи компаратора з'єднані з виходами блоку введення констант, блоку обчислення модуля кутової швидкості обертання Землі, блоку обчислення модуля прискорення сили тяжіння Землі і блоку обчислення широти місця експлуатації приладу.
Текст
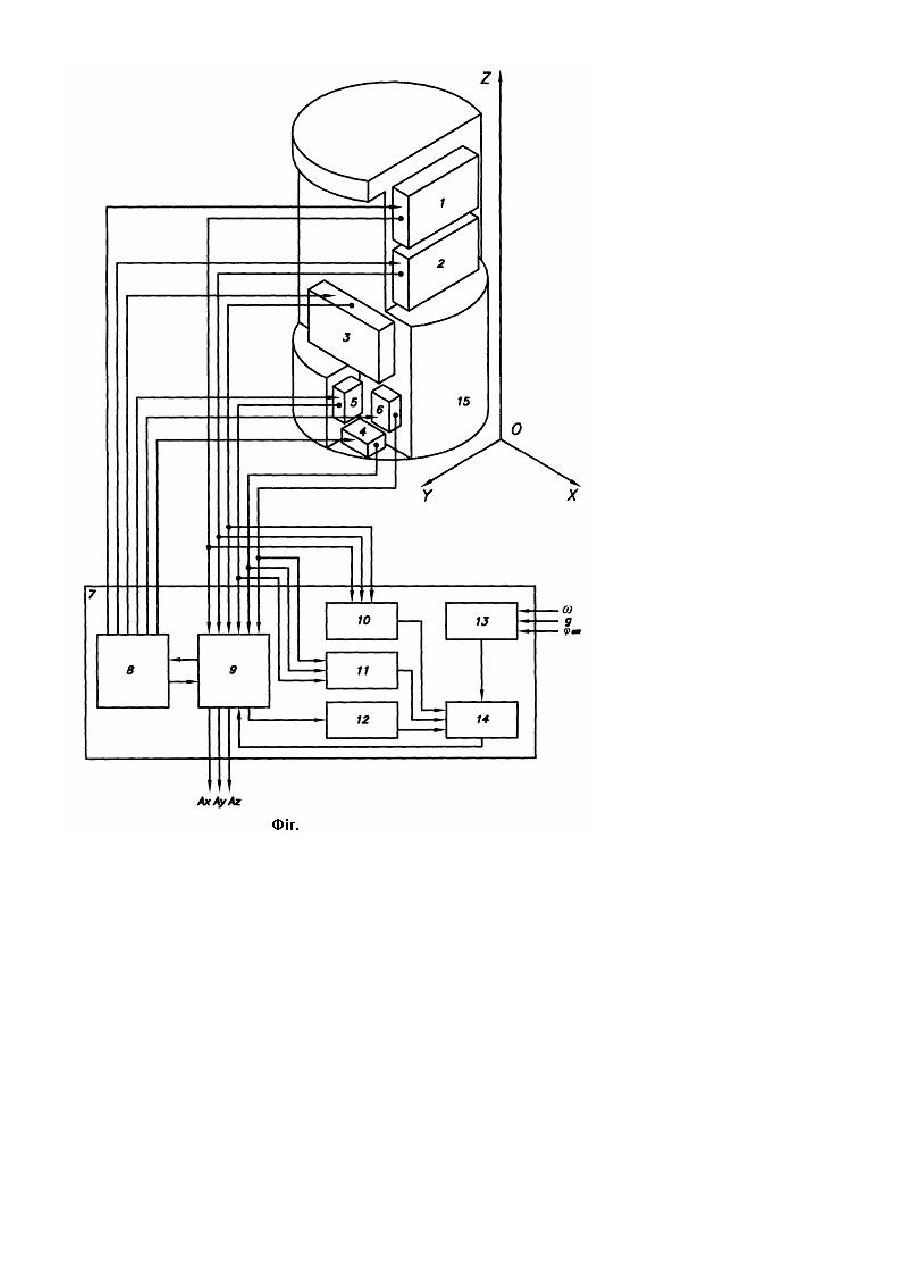
Корисна модель належить до вимірювальної техніки, зокрема до гіроскопічного приладобудування і може бути використана у різних об'єктах для здійснення автономного азимутального орієнтування або визначення азимута орієнтирного напрямку, наприклад, при проведенні геодезичних робіт, у будівництві, робототехніці, для визначення азимутальної орієнтації стаціонарних і нерухомих (на стоянці) об'єктів, при проведенні інклінометричних досліджень різних свердловин тощо. З рівня техніки відомий пристрій для реалізації способу визначення азимута, побудований за принципом безплатформної інерційної навігаційної системи (БІНС) [Патент РФ 1827541 В.И. Галкин, Е.А. Измайлов, А.А. Маслов. "Измерительный блок инклинометра"// БИ, 1993. №26.], прийнятий авторами за прототип. Зазначений пристрій складається з: трьох датчиків кутової швидкості із взаємно ортогональними вимірювальними осями, трьох акселерометрів із взаємно ортогональними вимірювальними осями, блока керування та обчислення азимута, що у свою чергу складається з блоку керування та спецобчислювача, у якому вимірювальні осі датчиків кутової швидкості (ДКШ) та акселерометрів попарно колінеарні відповідним осям опорної прямокутної системи координат, жорстко зв'язаної з об'єктом, азимут якого підлягає вимірюванню, при чому виходи блоку керування з'єднані з входами датчиків кутової швидкості, акселерометрів і спецобчислювача, вхід блоку керування з'єднаний з виходом спецобчислювача, входи спецобчислювача з'єднані з виходами датчиків кутової швидкості, акселерометрів. Зазначений пристрій для вимірювання азимута має наступні недоліки: - можливість використання лише для визначення азимута тільки однієї осі (у даному випадку вісь OZ), пов'язаної з об'єктом вимірювань, що може привести до втрати азимутальної орієнтації об'єкта, у випадку збігу вимірювальної осі з вертикаллю місця; - відсутність можливості контролю достовірності первинної інформації, вимірюваної ДКШ та акселерометрами, і як наслідок, достовірності виміру азимута. Задачею запропонованої корисної моделі є створення пристрою для вимірювання азимута, що дозволяє визначати азимути осей об'єкта OX, OY, OZ із здійсненням контролю достовірності первинної інформації, вимірюваної ДКШ та акселерометрами і, як наслідок, забезпечення достовірності вимірювань азимута. Поставлена задача вирішується шляхом створення пристрою для визначення азимута, що складається з трьох датчиків кутової швидкості із взаємно ортогональними вимірювальними осями, трьох акселерометрів з взаємно ортогональними вимірювальними осями, блоку керування та обчислення азимута, що у свою чергу складається з блоку керування та спецобчислювача, у якому вимірювальні осі датчиків кутової швидкості та акселерометрів попарно колінеарні відповідним осям опорної прямокутної системи координат, жорстко пов'язаної з об'єктом азимут якого підлягає вимірюванню, при цьому виходи блоку керування з'єднані із входами датчиків кутової швидкості, акселерометрів та спецобчислювача, вхід блоку керування з'єднаний з виходом спецобчислювача, входи спецобчислювача з'єднані з виходами датчиків кутової швидкості, акселерометрів. При цьому відповідно до корисної моделі до складу пристрою введено блок введення констант, компаратор та блоки визначення широти місця експлуатації, модулів кутової швидкості обертання Землі, прискорення сили тяжіння Землі, причому, вхід спецобчислювача з'єднаний з компаратором, входи блоку обчислення модуля кутової швидкості обертання Землі з'єднані з виходами датчиків кутової швидкості, входи блоку обчислення модуля прискорення сили тяжіння Землі з'єднані з виходами акселерометрів, вхід блоку обчислення широти місця експлуатації приладу з'єднаний з виходом спецобчислювача, входи компаратора з'єднані з виходами блоку вводу констант, блоку обчислення модуля кутової швидкості обертання Землі, блоку обчислення модуля прискорення сили тяжіння Землі і блоку обчислення широти місця експлуатації приладу. Запропонована корисна модель ілюструється доданою фігурою. На Фіг. представлена функціональна схема пристрою, що включає: три ДКШ 1, 2, 3; три акселерометри 4, 5, 6; блок керування та обчислення (БКО) 7, що у свою чергу складається з блоку керування (БК) 8 і спецобчислювача 9; блок обчислення модуля кутової швидкості обертання Землі 10; блок обчислення модуля прискорення сили тяжіння Землі 11; блок обчислення широти місця експлуатації 12; блок вводу констант 13; компаратор 14. ДКШ 1, 2, 3 та акселерометри 4, 5, 6 жорстко закріплені на корпусі 15 пристрою, а вимірювальні осі ДКШ та акселерометрів утворюють два взаємно ортогональних тетраедри. Вимірювальні осі ДКШ 1 та акселерометра 4, ДКШ 2 та акселерометра 5, ДКШ 3 та акселерометра 6 попарно паралельні між собою та колінеарні осям OX, OY, OZ, опорної прямокутної системи координат, зв'язаної з об'єктом азимут якого підлягає вимірюванню. Виходи БК 8 з'єднані із входами ДКШ 1, 2, 3, акселерометрів 4, 5, 6 та спецобчислювача 9, вхід БК 8 з'єднаний з виходом спецобчислювача 9, а входи спецобчислювача 9 з'єднані з виходами ДКШ 1, 2, 3, акселерометрів 4, 5, 6, компаратора 14, входи блоку обчислення модуля кутової швидкості обертання Землі 10 з'єднані з виходами ДКШ 1, 2, 3, входи блоку обчислення модуля прискорення сили тяжіння Землі 11 з'єднані з виходами акселерометрів 4, 5, 6, вхід блоку обчислення широти місця експлуатації 12 з'єднаний з виходом спецобчислювача 9, входи компаратора 14 з'єднані з виходами блоку вводу констант 13, обчислення модуля кутової швидкості обертання Землі 10, обчислення модуля прискорення сили тяжіння Землі 11, обчислення широти місця експлуатації 12. Спецобчислювач 9 - аналогово-цифровий пристрій, призначений для обробки аналогової інформації що надходить з ДКШ 1, 2, 3, акселерометрів 4, 5, 6 і компаратора 14, перетворення її в цифрову форму та видачі цифрових даних для роботи блоку управління 8, обчислення шуканих азимутів Ах, Ay, Az і аналогових даних для роботи блоку обчислення широти місця експлуатації 12. Блок обчислення модуля кутової швидкості обертання Землі 10 - аналоговий пристрій, призначений для обчислення шуканого модуля за інформацією одержаних з ДКШ 1, 2, 3. Блок обчислення модуля прискорення сили тяжіння Землі 11 - пристрій призначений для подачі в аналоговому вигляді значення прискорення сили тяжіння Землі, обчисленого за аналоговими сигналами, що надходять з акселерометрів 4, 5, 6. Блок обчислення широти місця експлуатації 12 призначений для видачі в аналоговому вигляді інформації про обчислену широту місця експлуатації за даними, що надходять із спецобчислювача 9. Блок вводу констант 13 - цифро-аналоговий пристрій, призначений для перетворення введеної еталонної цифрової інформації про швидкість обертання Землі, прискорення сили тяжіння Землі та широту місця експлуатації у аналоговий вигляд. Компаратор 14 - аналоговий пристрій, призначений для порівняння еталонних та обчислених у пристрої значень і генерування ознак достовірності вимірюваної інформації. Робота запропонованого пристрою здійснюється у такий спосіб. Оператор вводить до блоку констант 13 інформацію про еталонні значення кутової швидкості обертання Землі (w), прискорення сили тяжіння Землі (g) і широті місця експлуатації (jет), які надходять до компаратора 14, а потім за допомогою БК 8 видає команди на включення спецобчислювача 9, ДКШ 1, 2, 3 та акселерометрів 4, 5, 6. По закінченні вимірювального циклу, що визначається за таймером спецобчислювача 9, БК 8 здійснює опитування ДКШ 1, 2, 3 та акселерометрів 4, 5, 6. Виміряна інформація з первинних датчиків надходить на відповідні входи спецобчислювача 9, та до блоків обчислення модулів кутової швидкості обертання Землі 10, прискоренні сили тяжіння Землі 11. Відповідно до формули (1) æB ö A X( Y , Z) = p × k + a rctgç 1X (Y , Z) ÷ , (1) ç B 2X (Y , Z) ÷ è ø A X( Y , Z ) де - азимут осі OX (OY, OZ); k = 0, якщо B1X( Y , Z ) > 0 й B2 X( Y, Z ) > 0 ; k = 1, якщо B2 X( Y, Z ) < 0 ; k = 2, якщо B1X( Y , Z ) 0 ; ìB1X = - wy cosb siny1 + wz cos g siny 2 signb ï í ïB2 X = wx cos a + w y cos b cos y 1 + wz cos g cos y 2 î ; ì ïB1Y = w x cos a siny 1 - w z cos g siny 3 signb í ïB2 Y = wx cos a cos y1 + w y cos b + wz cos g cos y 3 î ; ìB1Z = - w x cos a siny 2signb + w y cos b siny 3 signa ï í ïB2 Z = w x cos a cos y 2 + w y cos b cos y 3 + w z cos g î ; y 1 = arccos(- tga × tgb ), y 2 = arccos(- tga × tgg ), y 3 = arccos(- tgb × tgg), a, b, g - кути відхилення осей OX, OY, OZ щодо площини обрію відповідно, w x , wy , w z - проекції кутової швидкості обертання Землі на вимірювальні осі ОХ, OY, OZ об'єкта відповідно За допомогою спецобчислювача 9 визначають шукані азимути осей OX (AХ), OY (AY), OZ (AZ). Одночасно за допомогою блоків 10, 11, 12 обчислюють поточні значення швидкості обертання Землі, прискорення сили тяжіння Землі, широти місця експлуатації й порівнюють їх з еталонними значеннями в компараторі 14 по формулах (2-4) 2 2 2 wx + wy + wz - w w £ n w (2) де w - модуль кутової швидкості обертання Землі; nw - прийняте розрахункове значення припустимої відносної погрішності виміру модуля кутової швидкості обертання Землі, 2 2 2 gx + gy + gz - g g = sin2 a + sin2 b + sin2 g - 1 £ n g , (3) де: g - модуль прискорення сили тяжіння Землі; g x, g y, g z - проекції прискорення сили тяжіння Землі на вимірювальні осі OX, OY, OZ об'єкта відповідно; ng - прийняте розрахункове значення припустимої відносної погрішності виміру модуля сили тяжіння Землі, j - j ет £ Dj доп , (4) æ ö ç wx sin a + w y sinb + wz sin g ÷ де: j = a rctgç ÷ - поточне значення широти місця експлуатації об'єкта 2 ç ÷ B1X( Y, Z) + B2 X( Y, Z) 2 è ø j ет - еталонне значення широти місця експлуатації об'єкта; j доп - припустиме значення погрішності визначення широти місця експлуатації об'єкта; При виконанні умов (2-4) - результати вимірів вважаються достовірними, у іншому випадку - ні. В такий спосіб запропонований пристрій дозволяє одночасно визначати азимути осей ОХ, OY, OZ, що дозволяє постійно мати інформацію про азимутальну орієнтацію об'єкта азимут якого підлягає обчисленню. Зважаючи на те, що виміряна ДКШ та акселерометрами інформація дозволяє визначити кутову швидкість обертання Землі, прискорення сили тяжіння Землі і широту місця знаходження приладу, то порівнюючи обчислені константи з їхніми еталонними значеннями, які апріорі відомі, можна з високою точністю судити про достовірність одержаної інформації. У випадку, якщо інформація про широту місця експлуатації відсутня, то обчислена широта може бути використана для вирішення інших завдань. Наведені результати підтверджені матеріалами випробувань дослідного зразка пристрою, розробленого та випробуваного ТОВ «Спецсервіс» (м. Київ).
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining azimuth
Автори англійськоюLeonenko Serhii Mykolaiovych
Назва патенту російськоюУстройство для определения азимута
Автори російськоюЛеоненко Сергей Николаевич
МПК / Мітки
МПК: G01P 9/00
Мітки: визначення, азимуту, пристрій
Код посилання
<a href="https://ua.patents.su/3-8693-pristrijj-dlya-viznachennya-azimutu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення азимуту</a>
Спосіб визначення азимуту
Номер патенту: 8694
Опубліковано: 15.08.2005
Автори: Шервашидзе Володимир Варламович, Шкляр Володимир Петрович, Макарчук Володимир Федорович, Шервашидзе Олексій Володимирович
МПК: G01P 9/00
Мітки: спосіб, визначення, азимуту
Формула / Реферат:
1. Спосіб визначення азимута орієнтирного напрямку, що полягає у вимірі проекцій ωx, ωy, ωz кутової швидкості обертання Землі ω й проекцій gx, gy, gz прискорення сили тяжіння Землі g на вимірювальні осі датчиків кутової швидкості й акселерометрів колінеарних і жорстко зв'язаних з осями OX, OY, OZ об'єкта, який відрізняється тим, що вибирають осі, азимути яких підлягають вимірюванню (вимірювальні осі), проектують складові...
Пристрій для використання енергії потоку
Номер патенту: 63018
Опубліковано: 15.01.2004
Автор: Скрипчінський Вадим Володимирович
МПК: F03B 17/06, F03D 1/00
Мітки: використання, потоку, енергії, пристрій
Формула / Реферат:
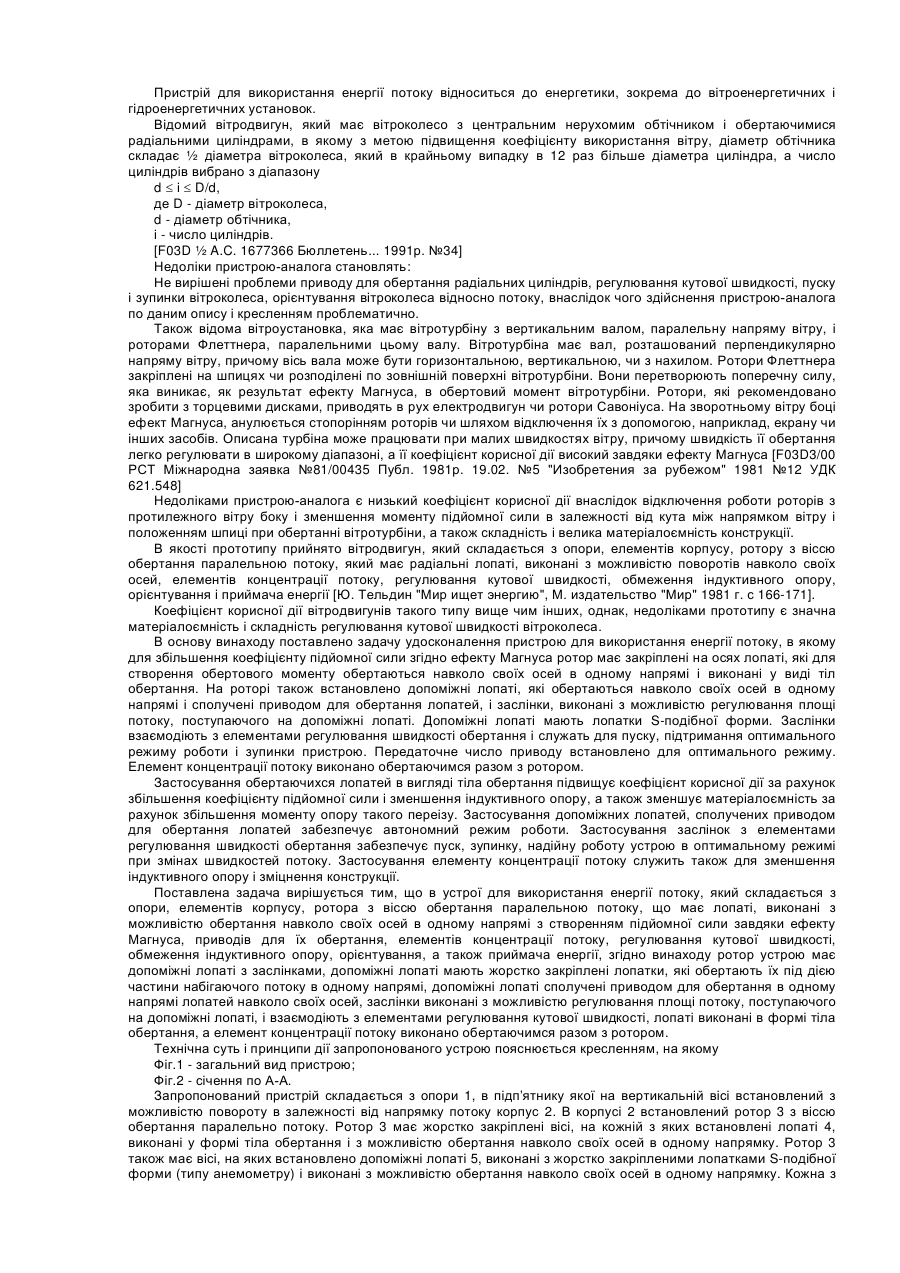
Пристрій для використання енергії потоку, що складається з опори, елементів корпусу, ротора, з віссю обертання паралельно потоку і який має лопаті, виконані з можливістю обертання навколо своїх осей в одному напрямі з створенням підйомної сили завдяки ефекту Магнуса, приводів для обертання лопатей, елементів концентрації потоку, регулювання кутової швидкості, обмеження індуктивного опору, орієнтування, а також приймача енергії, який...
Вимірювач азимуту і кута місця для трикоординатної рлс
Номер патенту: 13418
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: трикоординатної, рлс, вимірювач, азимуту, місця, кута
Формула / Реферат:
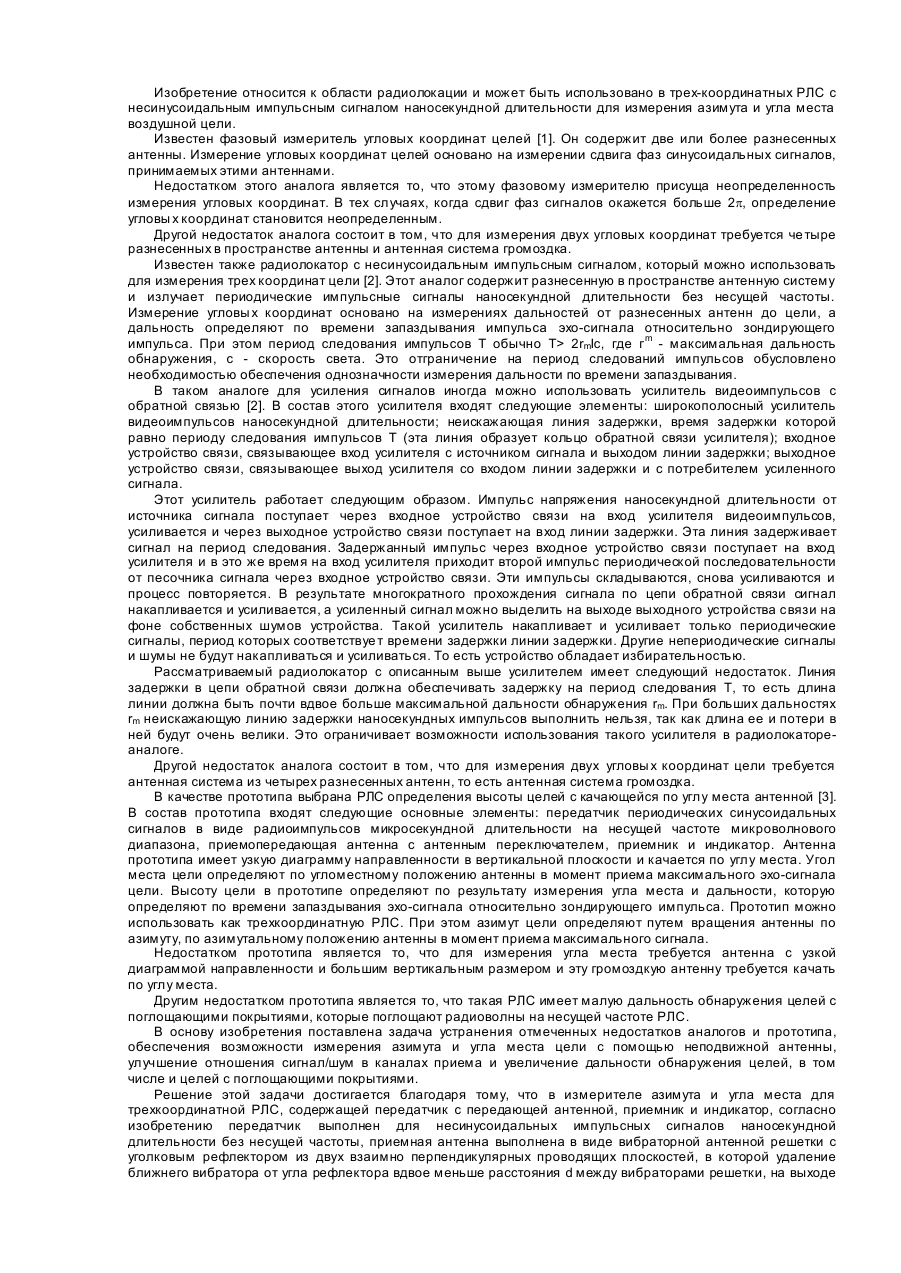
Измеритель азимута и угла места для трехкоординатной РЛС, содержащий передатчик с передающей антенной, приемник и индикатор, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от...
Спосіб вимірювання азимуту повітряних цілей
Номер патенту: 13423
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: цілей, повітряних, азимуту, спосіб, вимірювання
Формула / Реферат:
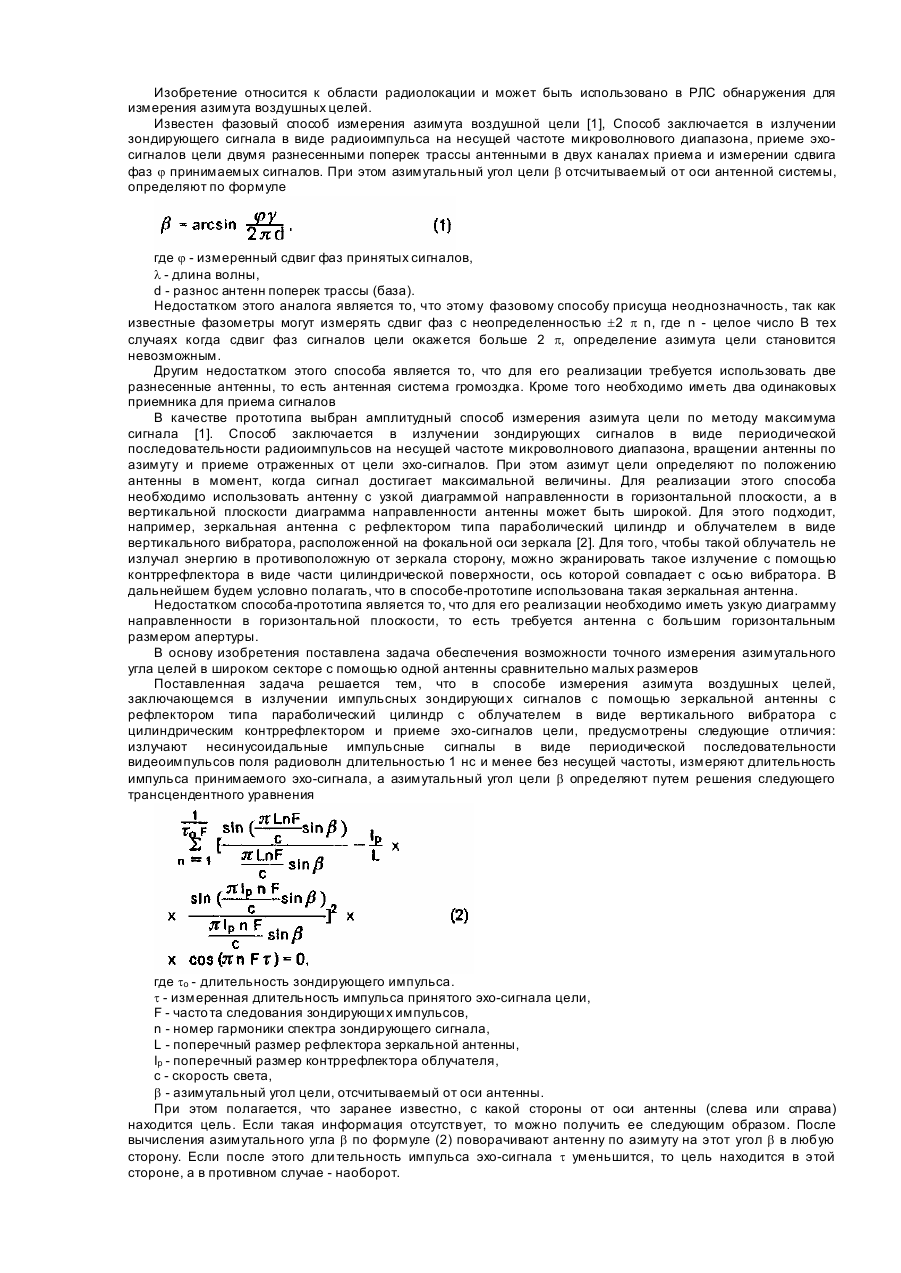
Способ измерения азимута воздушных целей, заключающийся в излучении импульсных зондирующих сигналов с помощью зеркальной антенны с рефлектором типа параболический цилиндр с облучателем в виде вертикального вибратора с цилиндрическим контррефлектором и приеме эхо-сигналов цели, отличающийся тем, что излучают несинусоидальные импульсные сигналы в виде периодической последовательности видеоимпульсов поля радиоволн длительностью 0,1-1 не без...
Спосіб визначення передачі коливань у кронах дерев
Номер патенту: 62903
Опубліковано: 15.12.2003
Автори: Шевчук Роман Степанович, Миронюк Олег Сергійович, Паславський Ростислав Ігорович
МПК: A01D 46/26
Мітки: дерев, кронах, визначення, коливань, спосіб, передачі
Формула / Реферат:
Спосіб визначення передачі коливань у кронах дерев, при якому фіксують коливання стовбура і гілок крони, який відрізняється тим, що одночасно вимірюють прискорення коливань стовбура в горизонтальній площині, а прискорення коливань гілок крони - у горизонтальній та вертикальній площинах за допомогою комплекту акселерометрів з реєструючим пристроєм.
Попередній патент: Підлога безшовна наливна
Наступний патент: Безкорпусний кремнієвий надвисокочастотний р-і-n-діод
Випадковий патент: Спосіб обробки металевих штаб перед холодною прокаткою