Автоматичний підлоговий транспортний засіб
Номер патенту: 176
Опубліковано: 30.04.1993
Автори: Бобиляк Микола Васильович, Орлов Борис Арсентьович, Гренадер Михайло Юхимович, Володарський Віктор Тимофійович

Формула / Реферат
Ф о р м у л а и з о б р е т е н и я
1. Автоматическое напольное транспортное средство, содержащее ведущие и ведомые колеса, одни из которых, расположенные по одному из бортов, имеют общий привод поворота, один из блоков для считывания сигналов путевых меток, подключенный выходом к одному из входов дешифратора, датчики углов поворота колес и формирователь управляющих сигналов приводами ведущих колес, о т л и ч а ю щ е е с я тем, что, с целью повышения надежности и маневренности, оно снабжено общим приводом поворота колес, расположенных по другому борту, блоком задания углов поворота колес ведомого при повороте борта, узлом смены режимов поворота колес и другим блоком для считывания сигналов путевых меток, к выходу последнего из которых подключен другой вход дешифратора, с выходами которого соединены первый и второй входы узла смены режимов поворота колес, подключенного третьими и четвертыми входами к выходам соответственно датчиков углов поворота колес и блока формирования сигналов углов поворота колес ведомого при повороте борта, вход которого соединен с одним из выходов узла смены режимов поворота колес, другие выходы которого связаны с приводами поворота колес, расположенных по одному и другому бортам.
2. Транспортное средство по п.1, о т л и ч а ю щ е е с я тем, что узел смены режимов поворота колес выполнен на аналоговых ключах, разделительных диодах и блоках вычитания, одни из входов которых подключены к выходам аналоговых ключей, причем анод одного из разделительных диодов и одни из входов одних из аналоговых ключей и блоков вычитания, анод другого разделительного диода и одни из входов других аналоговых ключей и блоков вычитания, другие входы блоков вычитания и другие входы аналоговых ключей являются соответственно первым, вторым, третьими и четвертым входами узла смены режимов поворота колес, одним и другими выходами которого являются соответственно катоды разделительных диодов и выходы блоков вычитания.
Текст
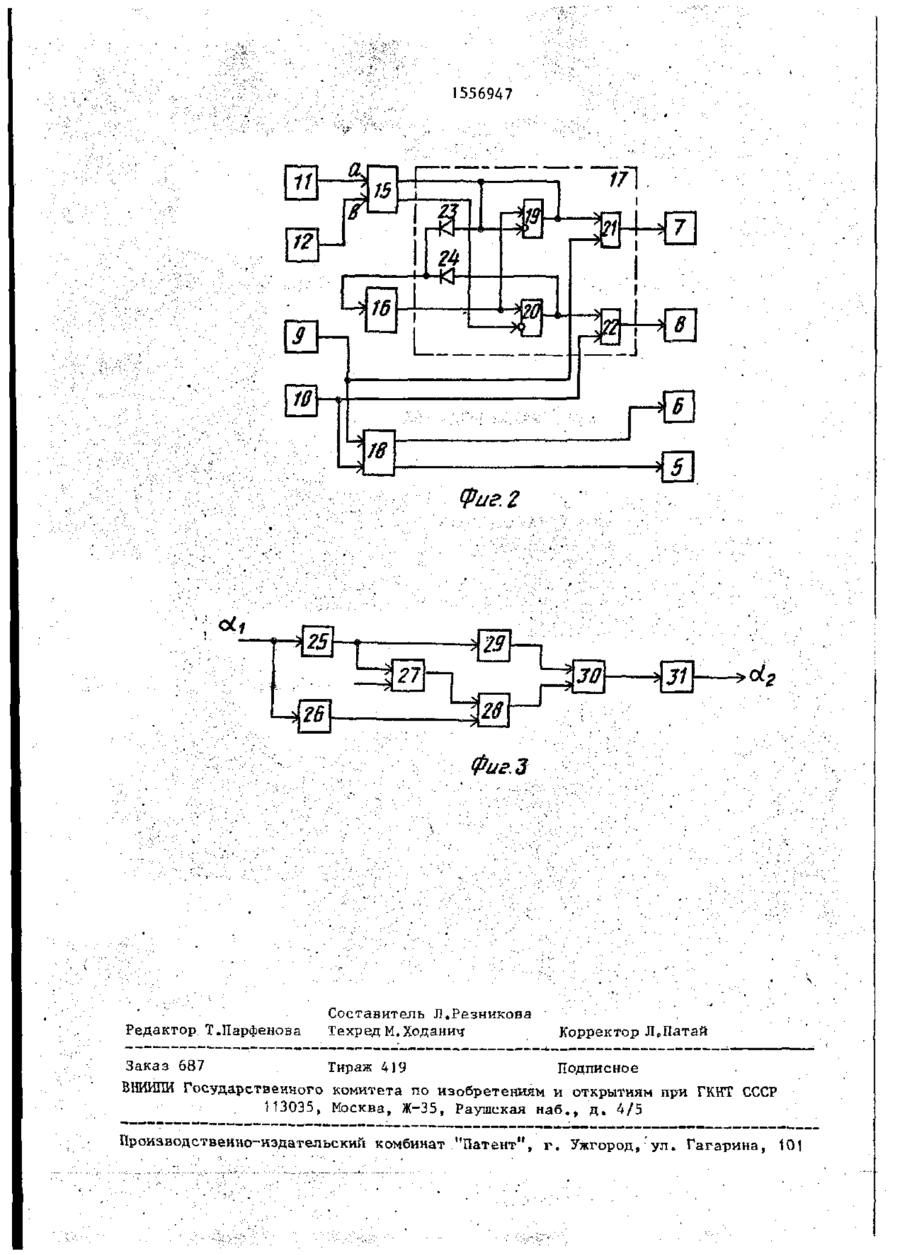
Изобретение относится к транспортным роботам, используемым в автоматизированных транспортных системах. Цель изобретения - повышение надежности. Автоматическое напольное транспортное средство содержит ведущие 2 и 3 и ведомые I ч 4 колеса с приводами 7 и 8 поворота колес одного и другого борта, блоки 11 и 12 считывания сигналов путевых меток,нанесенных на участках 13 и 14 трассы, 1 з,п. ф-лы, 3 ил * 8 С § 'IS: 556947 Изобретение относится к транспортным роботам и может быть использовано в качестве транспортного средства во внутрицеховых автоматизированных транспортных системах, в том числе в цехах промышленных предприятий, имеющих стесненные условия для маневрирования. Цель изобретения - повышение наt o дежности. На фиг в 1 представлена структурная схема предлагаемого транспортного средства; на сЬиг. 2 - структурная схема системы управления транспортным средством; на фиг. 3 - структурная схема блока задания углов поворота колес наружного борта. Автоматическое напольное транспортное средство (фиг,1) содержит 20 платформу с управляемыми ведущими колесами 1 и 2 и управляемыми ведомыми колесами 3 и 4. Ведущие колеса 1 и 2 снабжены соответственно приводами 5 и 6, Колеса 1 и 3 кинематичес-25 ки связаны с общим для них приводом 7 поворота колеса одного борта.Колеса 2 и 4 кинематически связаны с общим для них приводом 8 поворота колес другого борта. С приводами 7 и 8 зс кинематически связаны соответственно датчики 9 ТІ ІО углов поворота колес. Под шіат&ормой поперек соответственно продольной и поперечной осей транспортного средства размещены бло35 ки 11 и 12 для считывания сигналов путевых меток, нанесенных на продольных и поперечных участках 13 и 14 трассы его движения. ков 9 и 10, Узел 17 смены режимов поворота колес выполнен на аналоговых ключах 19 и 20, блоках 21 и 22 вычитания и разделительных диодах 23 и 24, Выходы аналоговых ключей 19 и 20 соединены с одними из входов блоков 21 и 22 вычитания. Анод разделительного диода 23, инверсный вход аналогового ключа 19 и один из входов блока 21 вычитания, анод разделительного диода 24, инверсный вход аналогового ключа 20 и один из входов блока 22 вычитания, другие входы блоков 21 и 22 вычитания и аналоговые входы ключей 19 и 20 являются соответственно первым, вторым, третьими и четвертым входами узла 17, одним и другими выходами которого являются соответственно катоды разделительных диодов 23 и 24 и выходы блоков 21 и 22 вычитания. Блок 16 (фиг.З) содержит синусные 25 и косинусные 26 преобразователи, умножитель 27, сумматор 28, инвертор 29 знака, делитель 30 и преобразователь 31 обратной тригонометрической функции arctgx. Объединенный вход преобразователей 25 и 26 является входом блока 16. Выход преобразователя 25 связан с одним из входов умножителя 27 и входом инвертора 29, выход которого соединен с одним из входов делителя 30. Выход преобразователя 26 связан с одним из входов сумматора 28, Другой вход умножителя 27 связан с источником постоянного сигнала,Выход умножителя 27 связан с другим входом сумматора 28, выход которого соедиСистема управления (фиг.2) содер40 нен с другим входом делителя 30,Выжит дешифратор 15 сигналов путевых ход делителя 30 соединен с входом меток, блок 16 формирования сигналов преобразователя ЗІ, выход которого углов поворота колес внешнего борта, является выходом блока 16. узел 17 смены режимов поворота колес, Автоматизированное напольное трансформирователь 18 управляющих сигналов портное средство работает следующим для приводов 5 и 6, Входы дешифратообразом. ра 15 соединены с выходами блоков 11 и 12 для считывания путевых гчеток, За базу для расчета углов повороа выходы - с первым и вторым входами та колес принята диагональ, на котоузла 17 смены режимов поворота колес, рой, например, расположены колеса 3 50 третьи и четвертый входы которого и 4, причем отклонение колес от исподключены соответственно к выходам ходного продольного положения продатчиков 9 и 10 и блока 16 задания тив часовой стрелки принято за полоуглов поворота колес внешнего борта, жительное, а по часовой стрелке вход которого соединен с одним из за отрицательное. выходов узла 17, другие выходы кото- 55 Такое расположение базовых колес рого связаны с приводами 7 и 8 поводает возможность получить на выходах рота колес, причем входы формировадешифратора 15 сигналы одинаковой теля 18 подключены к выходам датчиполярности, что в отличие от иного 5 1556947 расположение этих колес обеспечивазам колес, пропорциоет минимизацию учла смены режимов нальным необходимому поворота, так как внутренний при углу попорота колес криволинейном развороте борт принят ведомого (внешнего) ведущим, то У Г Л Ы поворота базового при развороте борта, колеса ведущего борта положительны, * С выхода б. ока 16 этот сигнал (ота углы поворота базового колеса верицательный) поступает через открыдомого (внешнего) борта отрицательтый клю^ 20 на один из входов элеменны (в положении, показанном на Лиг, та 22, Сигналы обратной связи от датведущим является борт с колесами чиков 9 и 10 поступают соответствен1 и 3). но на другие входы блоков 21 и 22,на Поэтому сигнал на выходе блока выходах которых Нормируются необходи16 должен быть противоположен по мые корректирующие сигналы для привознаку сигналу на выходе дешисЬратодов 7 и 8 поворота колес, ра \5у для чего в блоке 16 и примеПри необходимости прямолинейного нен инвертор 29. В принципе элемендвижения транспортного средства сигты инвентирования знака могут нахоналы с выходов дешифратора 15 и блодиться не в блоке 16, а в узле 17, ка 16 исчезают, так как обеспечиваетПри движении транспортного средства 20 ся выполнение условия прямолинейного вдоль участка 13 трассы по сигналам движения o , - оіг = 0, При движении f от блока 11 в дешифраторе 15 вырабана входы Формирователя 18 поступают тывается положительный сигнал,котосигналы от датчиков 9 и 10 о фактирый появляется на том выходе дешифческих углах поворота колес обоих ратора, который связан с приводом 25 бортов, В Формирователе 18 формируютповорота колес, расположенных по веся сигналы, пропорциональные требуедущему в данный момент борту.Величимым скоростям вращения приводов 5 и на этого сигнала соответствует тре6 обоих бортов с учетом выполнения буемому при этом углу поворота колес соотношения ведущего борта. 30 sin Если ведущим (внутренним) при разsin вороте является борт с колесами 1 Если ведущим является борт с кои 3, то задающий ('положительный'! лесами 2 и 4, то задающий положисигнал с одного из выходов дешифрательный сигнал, появившийся на другом тора 15 поступает на один из входов 35 выходе дешифратора IS, поступает на блока 21 вычитания и через диод 23 один из входов блока 22, обеспечивая на вход блока 16, Одновременно этот функционирование привода 8, и через сигнал, поступая на инверсный вход диод 24 на вход блока 16, Одновременаналогового ключа 19, запирает его. но этот сигнал, поступая на инверсСигнал на другом выходе дешифратора 40 ный вход аналогового ключа 20,запи15 при этом отсутствует, что обесперает его. Так как при этом сигнал на чивает сохранение открытого состояодном из выходов дешифратора 15 отния аналогового ключа 20. В блоке сутствует, то ключ 19 переводится 16 формируется сигнал в открытое состояние, При этом рас45 четный сигнал с выхода блока 16 пос- sin Ы.»= arctg , 2Ь 2Ь тупает через ключ 19 на один из вхоcos к, + а дов блока 21, обеспечивая функционирование привода 7, После достижения где Ы t > ti.Q_ - величины сигналов, транспортным средством заданного пропорциональные од50 участка 14 для поперечного движения ноименным углам повои ориентации перпендикулярно него рота колес соответстсвоей платформы по сигналам от блока венно ведущего и ве12 в дешифраторе 15 вырабатывается домого при повороте сигнал, величина которого соответстбортов; 55 вует требуемому повороту всех колес а и b - постоянные величины, на угол 90° относительно их исходнопропорциональные сого положения, а полярность соответстответственно продольвует требуемому направлению дальнейной и поперечной ба 1556947 шего ДВЇ-ІЖЄНИЯ. Этот сигнал появляется на обоих выходах дешифратора 15 и поступает на один из входов блоков 21 и 22. При этом одновременно происходит запирание цепей подачи расчетных сигналов от блока 16, Сигналы обратной связи от датчиков 9 и К) обеспечивают формирование на выходах э л е ментов 21 и 22 корректирующих сигналов для поворота колес каждого борта на угол 90° в одну и ту же сторону для всех колес независимо от их предыдущего положения. Это позволяет избежать реверса колес. На период указанной смены положения колес приводы 5 и 6 отключаются. После установки всех колес в положении, перпендикулярном исходному, обеспечивается возможность движения в поперечном направлении без изменения ориентации платформы транспортного средства. После возврата транспортного средства на продольный участ'ок трассы по сигналу от блока 11 в дешифраторе 15 вырабатывается положительный сигнал, соответствующий ее кривизне. Этот сигнал появляется на том выходе дешифратора, который связан с приводом поворота колес борт а , внутреннего при требуемом развор о т е . Одновременно открывается ключ, обеспечивающий поступление расчетного сигнала от блока 16 к приводу поворота колес внешнего борта. 10 T5 20 25 30 35 щие и ведомые колеса, одни из которых, расположенные по одному из бортов, имеют общий привод поворота, один ич блоков для считывания сигналов путевых меток, подключенный выходом к одному из входов дешифратора, датчики углов поворота колес и формирователь управляющих сигналов приводами ведущих колес, о т л и ч а ю щ е е с я тем, ч т о , с целью повыше* ния надежности и маневренности, оно снабжено общим приводом поворота к о л е с , расположенных по другому борту, блоком задания углов поворота колес ведомого при повороте борта, узлом смены режимов поворота колес и другим блоком для считывания сигналов путевых меток, к выходу последнего из которых подключен другой вход дешифратора, с выходами которого соединены первый и второй входы узла смены режимов поворота к о л е с , подключенного третьими и четвертыми входами к выходам соответственно датчиков углов поворота колес и блока формирования сигналов углов поворота колес ведомого при повороте борта, вход которого соединен с одним из выходов узла смены режимов поворота колес, другие выходы которого с в я заны с приводами поворота к о л е с , р а с положенных по одному и другому бортам, 2 . транспортное средство по п . 1 , После завершения установки колесо о т л и ч а ю щ е е с я тем, что обоих бортов в положение, соответстузел смены режимов поворота колес вующее кривизне участка 13 трассы, выполнен на аналоговых ключах,раздеобеспечивается возможность движения лительных диодах и блоках вычитания, 40 в продольном направлении. одни из входов которых подключены к выходам аналоговых ключей, причем Таким образом, предлагаемое трансанод одного из разделительных диодов портное средство оснащено многофунки одни из входов одних из аналоговых циональной системой управления,котоключей и блоков вычитания, анод друрая обеспечивает расширение диапазона гого разделительного диода и одни маневрирования не только за счет в о з из входов других аналоговых ключей и можности передвижения в поперечном блоков вычитания, другие входы блоков направлении, но и за счет возможносвычитания и другие входы аналоговых ти управлять поворотом колес в широключей являются соответственно первым, ких пределах как во время движения 50 вторым, третьими и четвертым входами по трассе любой кривизны, так и при узла смены режимов поворота к о л е с , развороте на месте, одним и другими выходами которого я в Ф о рD м у л а о и з о б р е т е н и я ляются соответственно катоды р а з д е лительных диодов и выходы блоков вы1. Автоматическое напольное транс55 читания. портное средство, содержащее веду 1556947 11 а. І 15 12 1 1 17]. і п ІІ N 04 і1 ~ 24 І I LJ І -4 16 20 — * — ••""" 3 їв • А• S щ и.18 (риг. 2 25 29 27 26 31 28 Фиг. 3 Редактор Т.Парфенова Составитель Л.Резникова ' Техред М.Ходанич Корректор ЛоПатай Заказ 687 Тираж 419 Подписное В И П Государственного комитета по изобретениям и открытиям при ГКНТ СССР НИИ 113035, Москва, Ж-35, Раушская наб.» д . 4/5 Производственно-издательский комбинат "Патент", г . Ужгород,'ул. Гагарина, 101
ДивитисяДодаткова інформація
Автори англійськоюHrenader Mykhailo Yukhymovych, Volodarskyi Viktor Tymofiiovych
Автори російськоюГренадер Михаил Ефимович, Володарский Виктор Тимофеевич
МПК / Мітки
МПК: B60K 31/00
Мітки: транспортний, засіб, автоматичний, підлоговий
Код посилання
<a href="https://ua.patents.su/6-176-avtomatichnijj-pidlogovijj-transportnijj-zasib.html" target="_blank" rel="follow" title="База патентів України">Автоматичний підлоговий транспортний засіб</a>
Пристрій для контролю максимального відхилення ротора від осі турбомашини
Номер патенту: 360
Опубліковано: 30.04.1993
Автори: Барков Олександр Степанович, Метельов Леонід Дмитрович, Морозов Микола Ібрагимович, Цибулько Вадим Йосипович
МПК: F01D 21/00
Мітки: ротора, пристрій, контролю, осі, турбомашині, максимального, відхілення
Формула / Реферат:
Формула изобретения Устройство для контроля максимального отклонения ротора от оси турбомашины, содержащее первый и второй первичные преобразователи, установленные вблизи ротора в одной плоскости по двум взаимно перпендикулярным осям и подключенные каждый своим выходом на вход соответственно первого и второго квадраторов, соединенных с входами первого сумматора, выход которого подключен через последовательно соединенные блоки...
Пристрій для контролю витрат гарячого дуття через фурми доменної печі
Номер патенту: 174
Опубліковано: 30.04.1993
Автори: Бабак Олег Володимирович, Терещенко Володимир Петрович, Степанов Василь Васильович, Чернов Віктор Олександрович
МПК: C21B 7/24
Мітки: витрат, гарячого, контролю, пристрій, печі, дуття, фурми, доменної
Формула / Реферат:
Формула изобретенияУстройство для контроля расхода горячего дутья через фурмы доменной печи, содержащее измеритель суммарного расхода горячего дутья, измерители перепада давления на фурменных приборах, соединенные с вычислительными блоками, вторичные регистрирующие приборы, отличающееся тем, что, с целью повышения быстродействия и надежности контроля, оно снабжено сумматором, первым блоком умножения, задатчиком отношения фактического...
Пристрій для контролю максимального відхилення ротора від осі турбомашини
Номер патенту: 346
Опубліковано: 30.04.1993
Автори: Маслій Володимир Миколайович, Цибулько Вадим Йосипович, Меншиков Сергій Миколайович, Метельов Леонід Дмитрович
МПК: F01D 21/00
Мітки: максимального, ротора, осі, відхілення, пристрій, контролю, турбомашині
Формула / Реферат:
Устройство для контроля максимального отклонения ротора от оси турбомашини по авт. св. № 1232833, отличающееся тем, что, с целью повышения точности путем определения амплитуды, фазы и частоты оборотной составляющей отклонения, оно снабжено формирователями синусного и косинусного опорных сигналов, последовательно соединенными вторым умножителем с двумя входами, первым фильтром низкой частоты и третьим умножителем с двумя входами,...
Пристрій для контролю максимального відхилення ротора від осі турбомашини
Номер патенту: 345
Опубліковано: 30.04.1993
Автори: Квашин Михайло Федорович, Морозов Микола Ібрагимович, Метельов Леонід Дмитрович, Маркевич Анатолій Васильович, Цибулько Вадим Йосипович
МПК: F01D 21/00
Мітки: ротора, пристрій, турбомашині, відхілення, осі, максимального, контролю
Формула / Реферат:
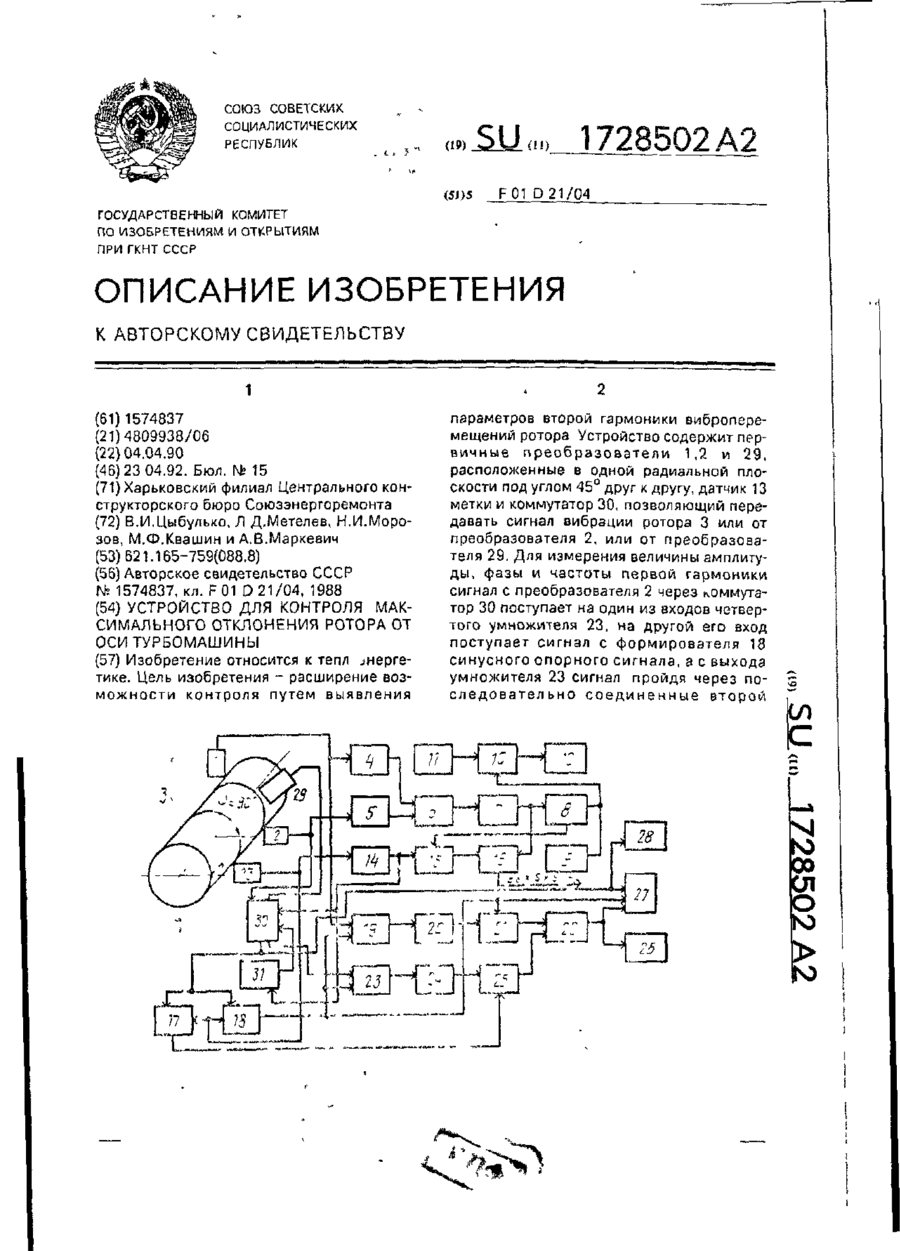
Формула изобретенияУстройство для контроля максимального отклонения ротора от оси турбомашины по авт. св. № 1574837, отличающееся тем, что, с целью расширения возможностей контроля путем выявления параметров второй гармоники вибросмещений ротора, оно снабжено третьим первичным преобразователем, вторым умножителем частоты и коммутатором, причем третий первичный преобразователь установлен вблизи ротора в плоскости установки первого и...
Пристрій для стримання перешкод
Номер патенту: 159
Опубліковано: 30.04.1993
Автори: Годлевський Віталій Станіславович, Владимирський Олександр Альбертович
МПК: G01S 7/537
Мітки: перешкод, стримання, пристрій
Формула / Реферат:
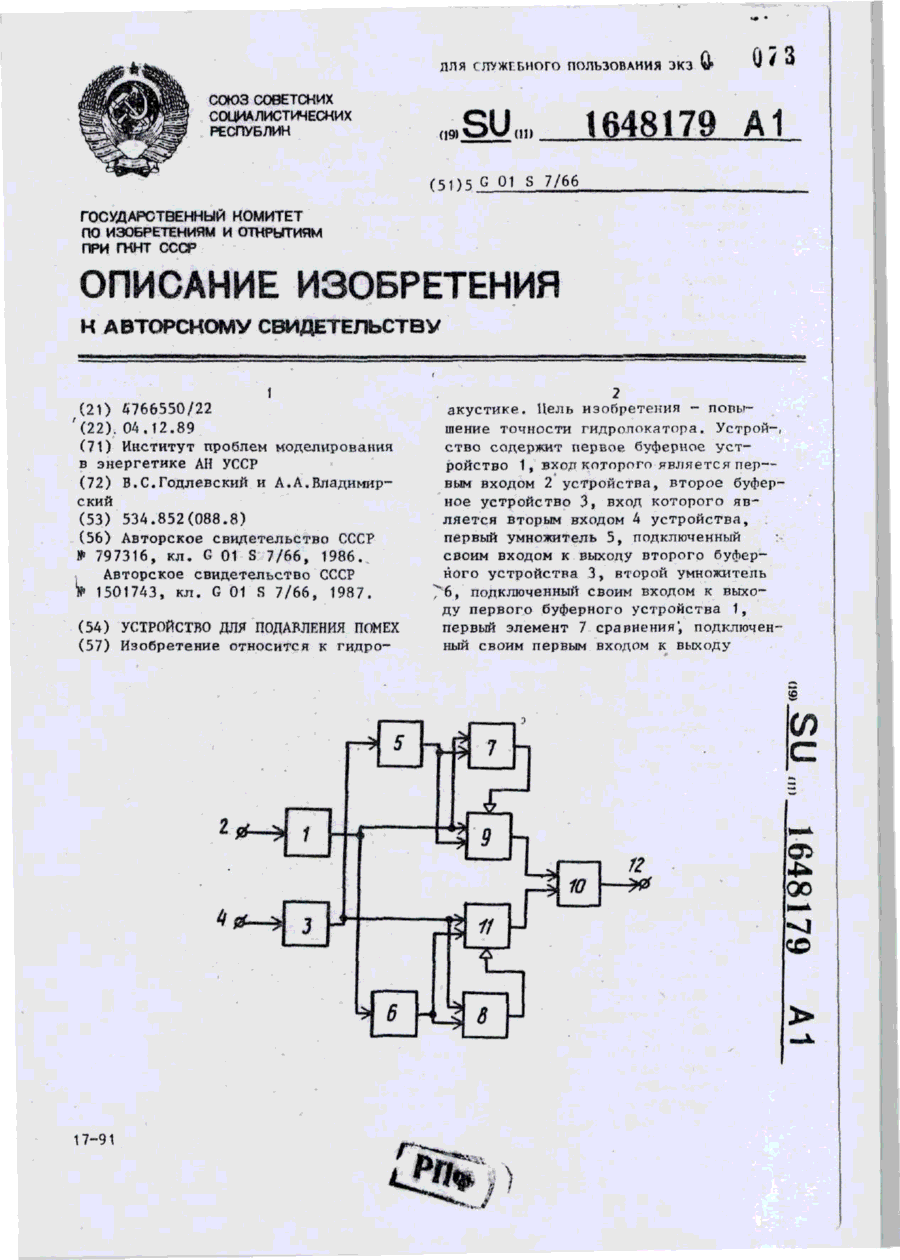
Устройство для подавления помех, содержащее первое буферное устройство, вход которого является первым входом устройства, второе буферное устройство, вход которого является вторым входом устройства, первый умножитель, подключенный своим входом к выходу второго буферного устройства, второй умножитель, подключенный своим входом к выходу первого буферного устройства, первый элемент сравнения, подключенный своим первым входом к выходу первого...
Попередній патент: Трифазна обмотка з перемиканням полюсів
Наступний патент: Установка для мокрої обробки та пропарювання зерна круп’яних культур
Випадковий патент: Спосіб отримання речовини з потенційними фізіологічними властивостями 1-(1',1'-дифтор-2'-бром-2'-хлоретил)-5-метилурацил