Підлоговий чотирьохколісний транспортний засіб
Номер патенту: 2507
Опубліковано: 26.12.1994
Автори: Володарський Віктор Тимофійович, Субботін Юрій Петрович, Самонін Анатолій Васильович, Шнейдер Володимир Львович, Кохан Іван Михайлович, Гренадер Михайло Юхимович

Формула / Реферат
1. Напольное четырехколесное транспортное средство, содержащее все управляемые колеса, кинематически попарно связанные между собой, по крайней мере, два из которых ведущие, блок управления с переключателем направления движения, связанный через исполнительный механизм с каждой парой управляемых колес, и элементы согласования поворота управляемых колес разных пар, отличающийся тем, что между собой попарно связаны управляемые колеса одного борта, а их кинематическая связь выполнена с возможностью поворота колес в противоположных направлениях, блок управления, элемент согласования поворота и переключатель направления движения выполнены в виде корпуса, в котором размещены две взаимно перпендикулярные направляющие с пазами, в которых размещен рулевой рычаг, установленный также в двух пересекающихся пазах, криволинейном и прямолинейном, выполненных в корпусе параллельно пазам в направляющих, при этом форма из пересекающихся пазов и длина криволинейного паза выполнены по следующим зависимостям:
где ; - координаты точек пересечения рулевого рычага с плоскостью пазов при повороте задающих направляющих соответственно на углы и ;
с - величина, пропорциональная расстоянию между центром поворота рулевого рычага и плоскостью пазов;
- коэффициент пропорциональности между углами поворота управляемых колес и соответствующих задающих направляющих;
"а" и "в" - соответственно продольная и поперечная базы колес, а - длина прямолинейного паза определяется выражением:
.
2. Напольное транспортное средство по п. 1, отличающееся тем, что кинематическая связь попарно соединенных управляемых колес выполнена в виде червячных пар, одноименные элементы которых выполнены с нарезкой в противоположных направлениях.
3. Напольное транспортное устройство по пп. 1, 2, отличающееся тем, что оно снабжено механизмом блокировки привода вращения ведущих колес, выполненным в виде криволинейной направляющей, закрепленной на конце рулевого рычага с возможностью взаимодействия с выключателем привода вращения ведущих колес на участке прямолинейного паза между конечными его точками.
Текст
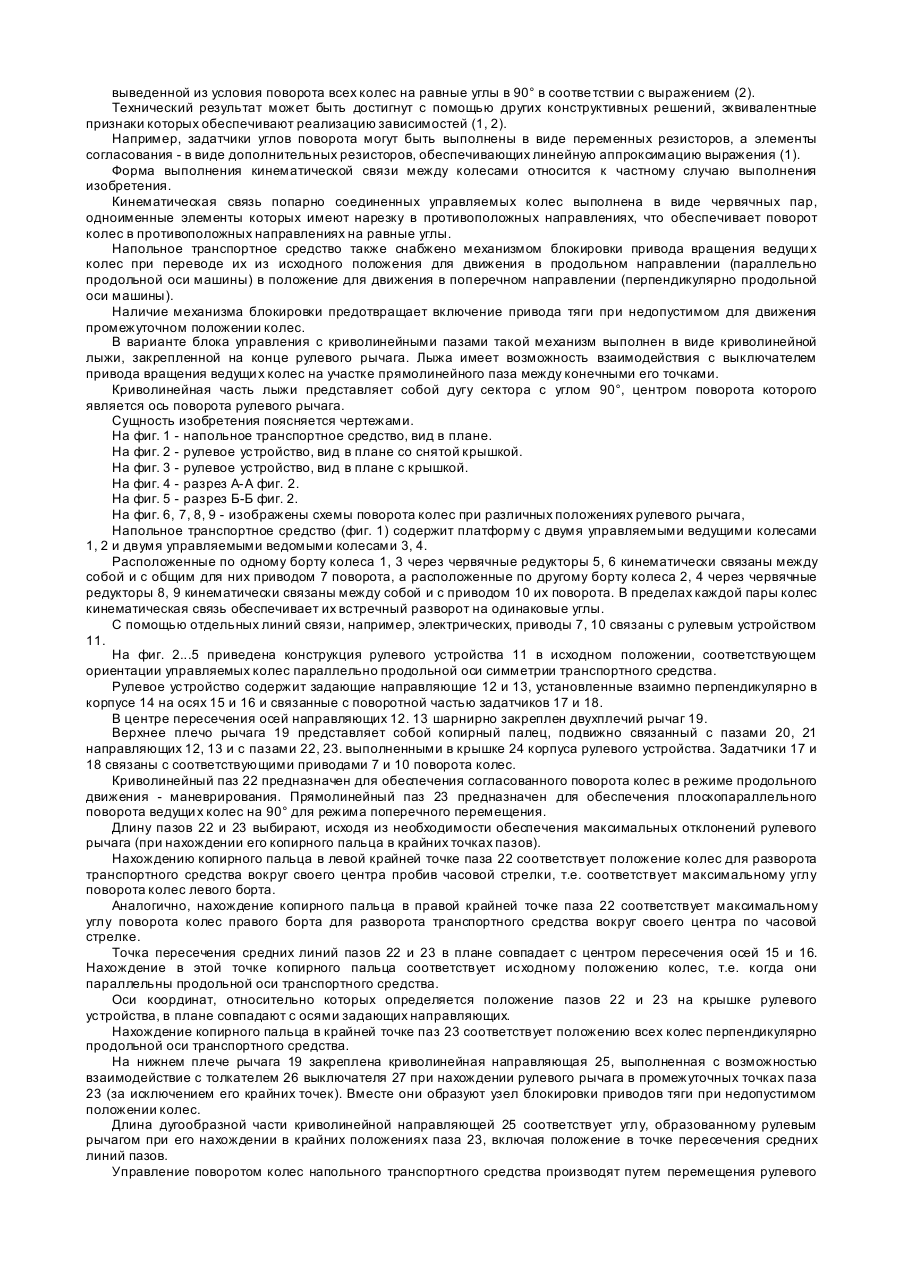
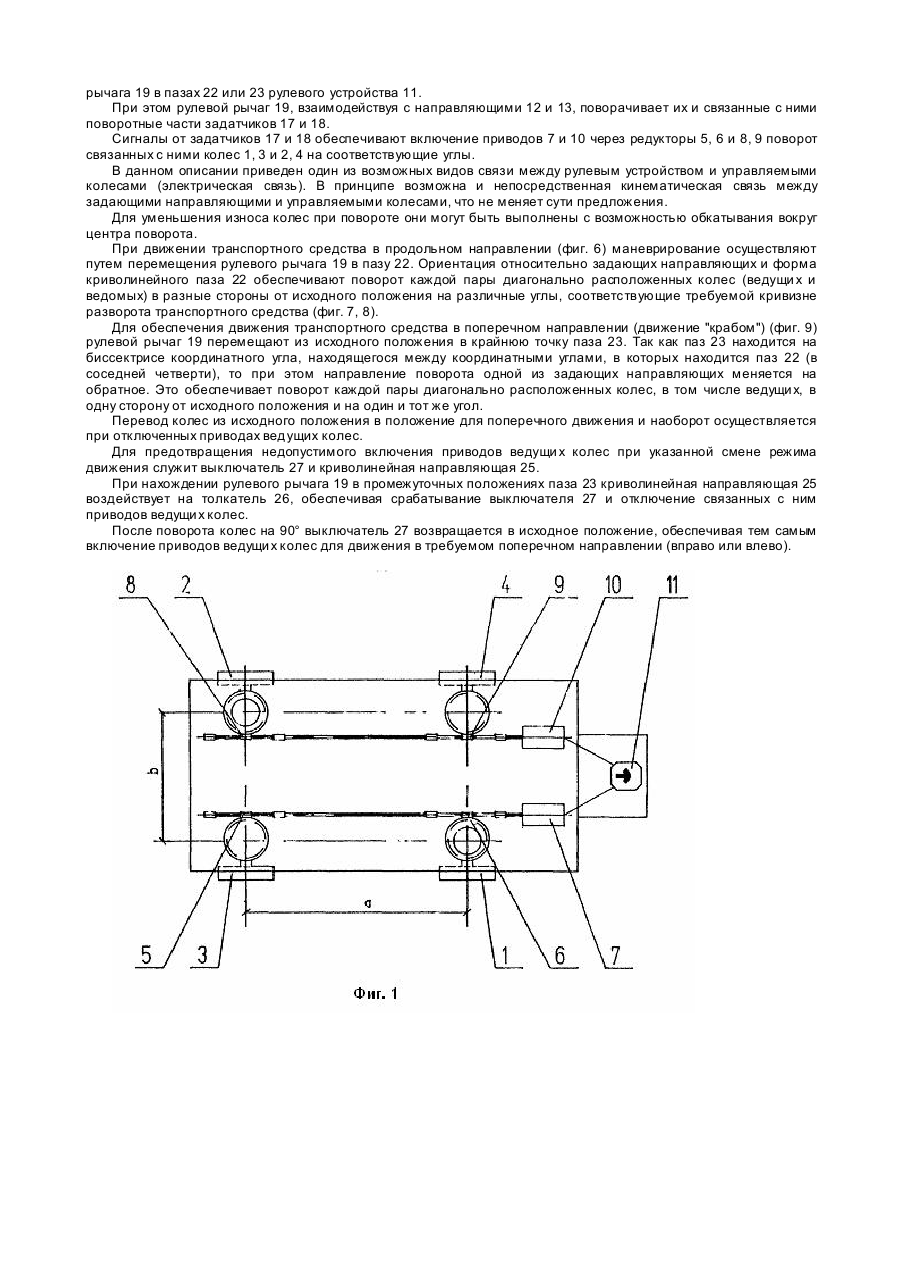
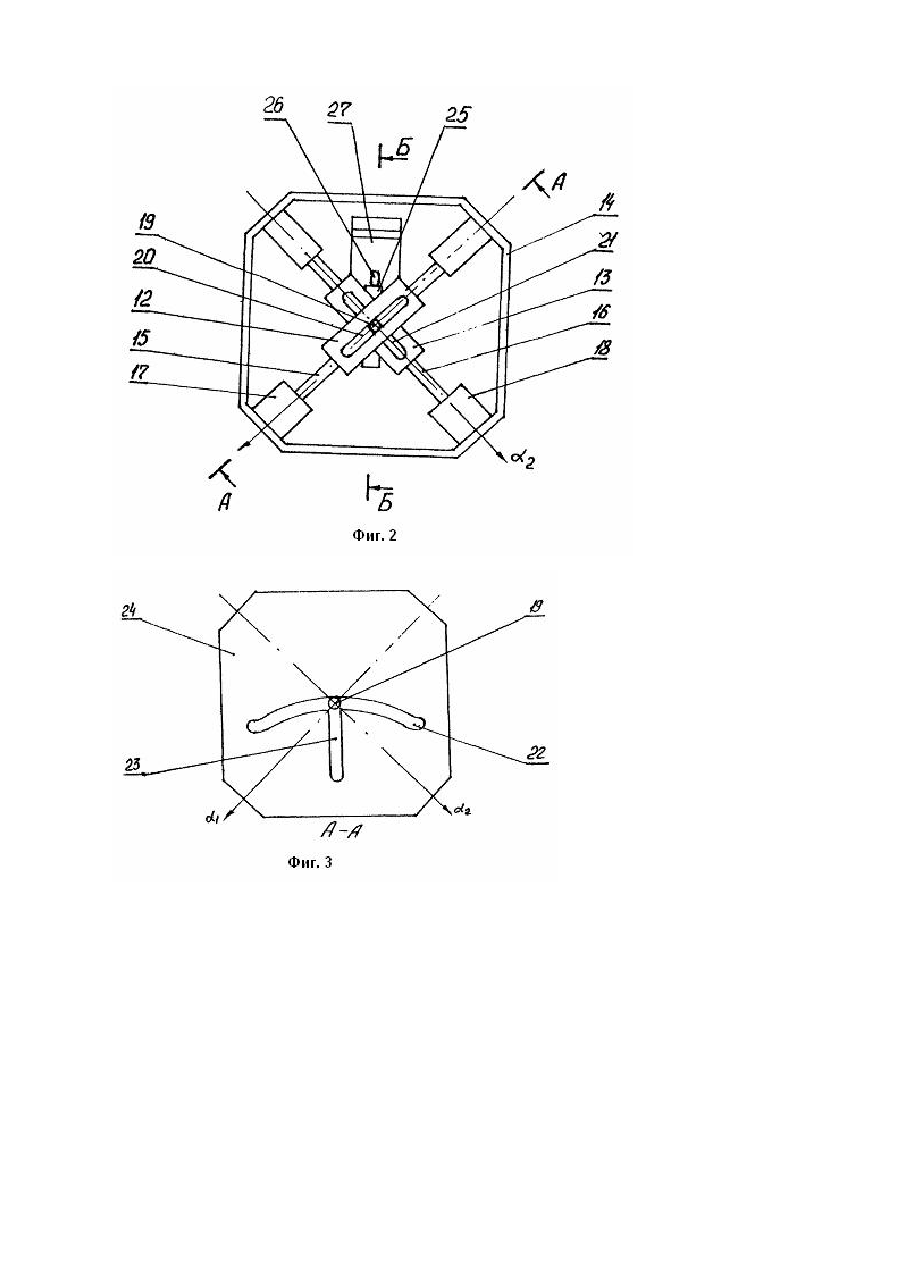
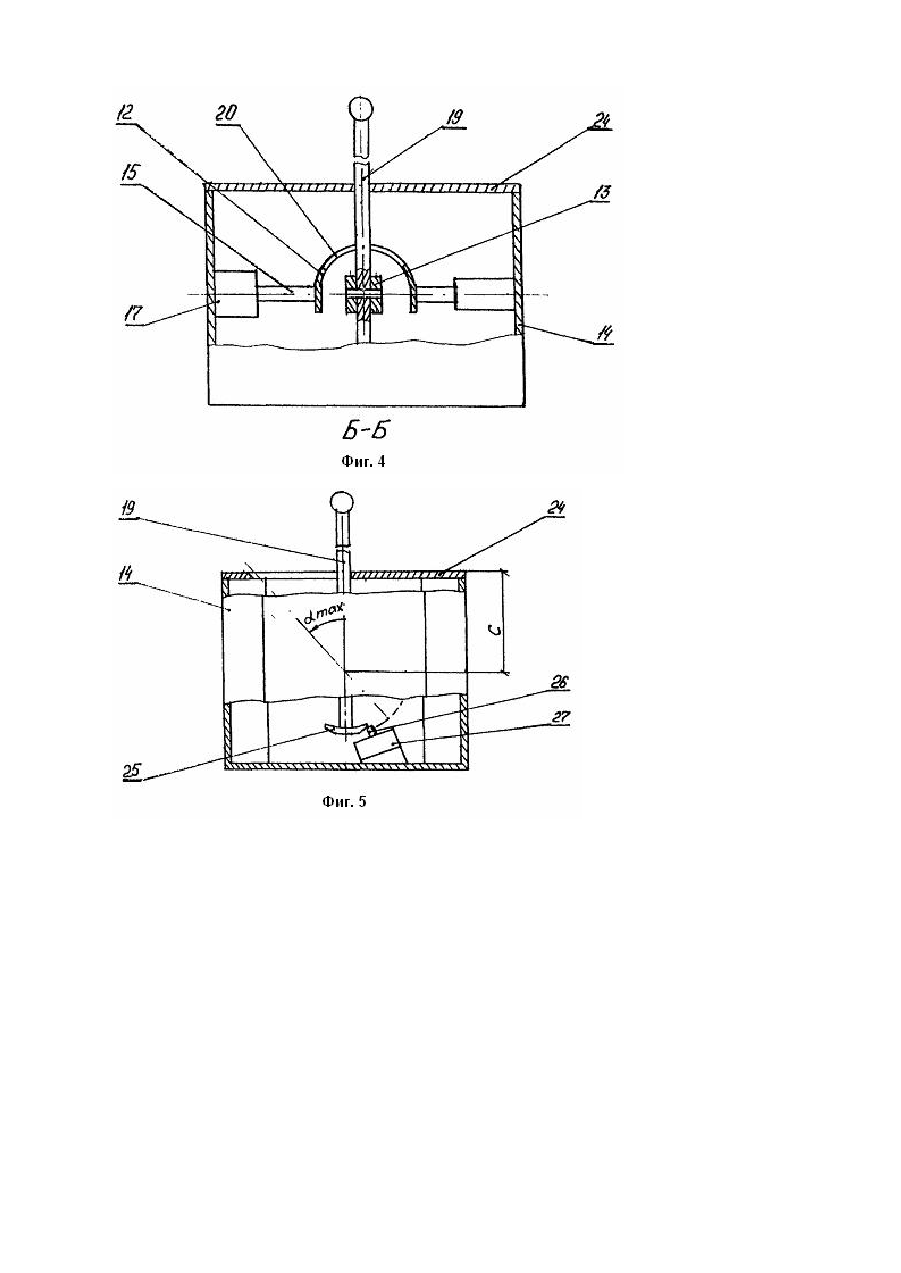
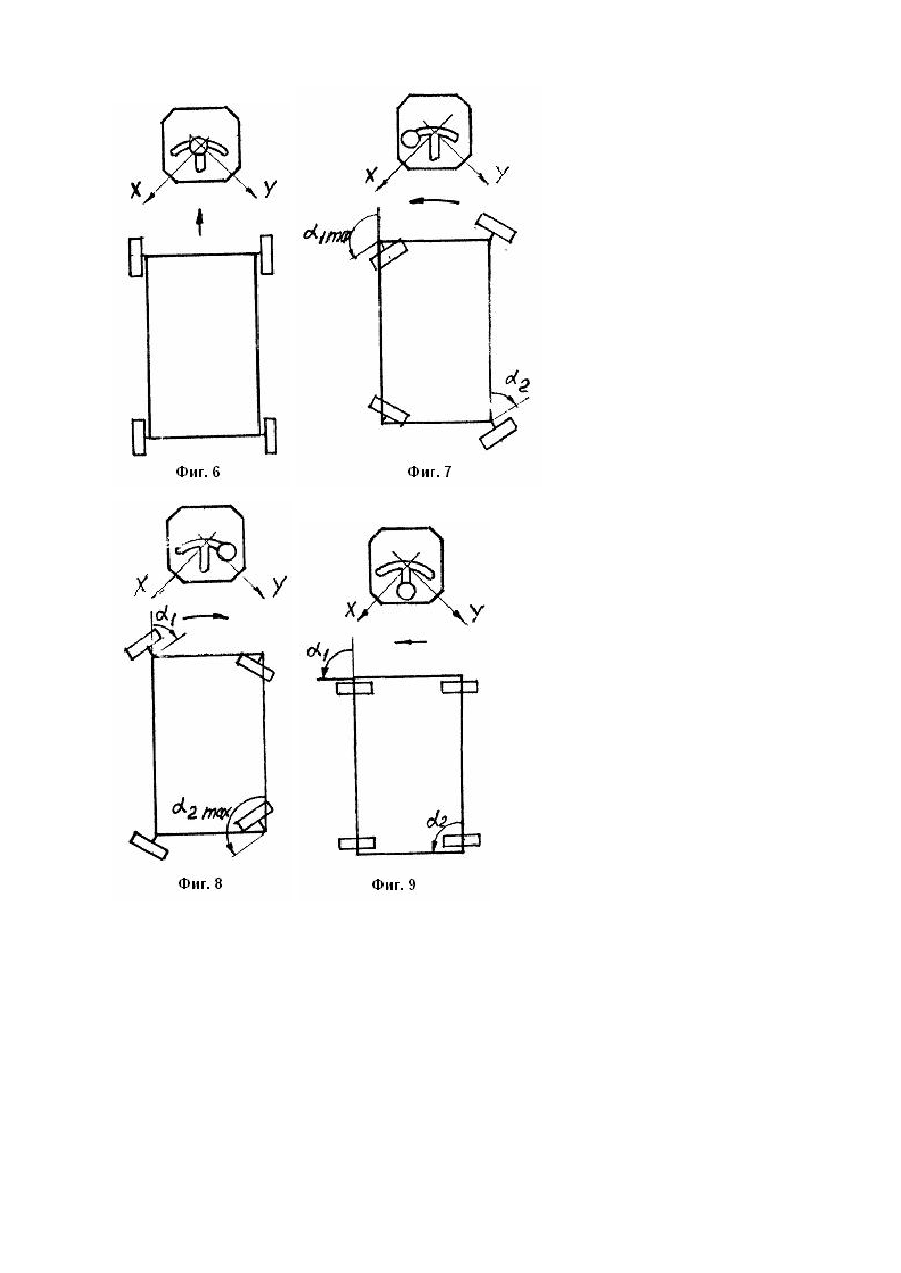
Изобретение относится к напольным транспортным средствам со всеми управляемыми колесами и может быть использовано в различных транспортных системах, в частности в цеха х промышленных предприятий, имеющих стесненные условия для маневрирования Известно транспортное средство со всеми управляемыми колесами, из которых, по крайней мере два, выполнены ведущими с приводами тяги. Оно включает блок управления в виде рулевого устройства с задающим органом, элемент согласованного поворота колес разных бортов при движении в продольном направлении и переключатель направления движения (1). Это средство имеет ряд недостатков: 1. Выполнение элемента согласованного поворота колес в виде трапеции резко ограничивает маневровые возможности, связанные с ограниченным углом поворота колес. 2. Наличие в устройстве переключателя направления движения не дает качественного решения задачи, т.к. трапеция не может обеспечить параллельное положение всех колес при их повороте в одну сторону. Вследствие этого, при езде в режиме "краб", будут происходить деформирующие нагрузки в ходовой и кинематической частях средства, а также повышенный износ покрытия колес. Следовательно, наличие жесткой связи в виде трапеции не позволяет выполнить согласованный поворот колес разных бортов для езды в поперечном направлении. Кроме того, переключатель режимов движения весьма сложен по конструкции и принципу действия. 3. Согласованный поворот передних и задних колес, а также колес каждого из бортов осуществляется посредством двух трапеций и следящего механизма. В основу изобретения поставлена задача создать такое напольное транспортное средство, в котором за счет расширения диапазона поворота колес повышается маневренность. Поставленная задача, согласно изобретению, решается тем, что между собой попарно связаны управляемые колеса одного борта, а кинематическая связь выполнена с возможностью поворота колес каждого борта в противоположных направлениях на равные углы. Таким образом, кинематически связаны колеса одного борта, а не разных. Такая связь колес каждого борта имеет следующие преимущества: - связанные между собой колеса, которые при движении в продольном и поперечном направлениях должны иметь одинаковый угол поворота, позволяют выполнить простыми средствами связь без трапеции; - отсутствие трапеции расширяет диапазон поворота колес до необходимых величин. Одновременно за счет исключения жесткой связи колес разных бортов появляется возможность заменить трапецию элементами согласованного поворота колес при большем диапазоне поворота и в разных режимах движения - продольном и поперечном. Блок управления выполнен с элементами согласования углов a 1 и a 2 поворота колес разных бортов для движения в продольном направлении в соответствии с выражением где а и b - величины, пропорциональные соответственно продольной и поперечной базе колес, и для движения в поперечном направлении в соответствии с выражением a 2 = a 1 (2). При этом переключатель направления движения выполнен с возможностью избирания указанных элементов согласования для движения в одном из двух направлений. Блок управления, преимущественно, выполняются в виде корпуса, в котором размещены две взаимно перпендикулярные направляющие с пазами, в которых размещен рулевой рычаг, установленный также в двух пересекающихся пазах, криволинейном и прямолинейном, выполненных в корпусе параллельно пазам в направляющих. При этом направляющие с пазами служат задатчиками углов поворота колес разных бортов, криволинейный и прямолинейный пазы являются элементами согласования поворота при движении, соответственно, в продольном и поперечном направлении, а рулевой рычаг выполняет также функцию переключателя направления движения. Форма и длина криволинейного паза определяется зависимостью: где x = c × tga 1 ; y = c × tga 2 - координаты точек пересечения рулевого рычага с плоскостью пазов при повороте задающих направляющих на углы соответственно на углы a 1 и a 2 в соответствии с выражением (1); с - величина, пропорциональная расстоянию между центром поворота рулевого рычага и плоскостью пазов; a k= - коэффициент пропорциональности между углами поворота управляемых колес и соответствующи х a1 направляющих. Длина прямолинейного паза определяется зависимостью выведенной из условия поворота всех колес на равные углы в 90° в соотве тствии с выражением (2). Технический результат может быть достигнут с помощью других конструктивных решений, эквивалентные признаки которых обеспечивают реализацию зависимостей (1, 2). Например, задатчики углов поворота могут быть выполнены в виде переменных резисторов, а элементы согласования - в виде дополнительных резисторов, обеспечивающих линейную аппроксимацию выражения (1). Форма выполнения кинематической связи между колесами относится к частному случаю выполнения изобретения. Кинематическая связь попарно соединенных управляемых колес выполнена в виде червячных пар, одноименные элементы которых имеют нарезку в противоположных направлениях, что обеспечивает поворот колес в противоположных направлениях на равные углы. Напольное транспортное средство также снабжено механизмом блокировки привода вращения ведущи х колес при переводе их из исходного положения для движения в продольном направлении (параллельно продольной оси машины) в положение для движения в поперечном направлении (перпендикулярно продольной оси машины). Наличие механизма блокировки предотвращает включение привода тяги при недопустимом для движения промежуточном положении колес. В варианте блока управления с криволинейными пазами такой механизм выполнен в виде криволинейной лыжи, закрепленной на конце рулевого рычага. Лыжа имеет возможность взаимодействия с выключателем привода вращения ведущи х колес на участке прямолинейного паза между конечными его точками. Криволинейная часть лыжи представляет собой дугу сектора с углом 90°, центром поворота которого является ось поворота рулевого рычага. Сущность изобретения поясняется чертежами. На фиг. 1 - напольное транспортное средство, вид в плане. На фиг. 2 - рулевое устройство, вид в плане со снятой крышкой. На фиг. 3 - рулевое устройство, вид в плане с крышкой. На фиг. 4 - разрез А-А фиг. 2. На фиг. 5 - разрез Б-Б фиг. 2. На фиг. 6, 7, 8, 9 - изображены схемы поворота колес при различных положениях рулевого рычага, Напольное транспортное средство (фиг. 1) содержит платформу с двумя управляемыми ведущими колесами 1, 2 и двумя управляемыми ведомыми колесами 3, 4. Расположенные по одному борту колеса 1, 3 через червячные редукторы 5, 6 кинематически связаны между собой и с общим для них приводом 7 поворота, а расположенные по другому борту колеса 2, 4 через червячные редукторы 8, 9 кинематически связаны между собой и с приводом 10 их поворота. В пределах каждой пары колес кинематическая связь обеспечивает их встречный разворот на одинаковые углы. С помощью отдельных линий связи, например, электрических, приводы 7, 10 связаны с рулевым устройством 11. На фиг. 2...5 приведена конструкция рулевого устройства 11 в исходном положении, соответствующем ориентации управляемых колес параллельно продольной оси симметрии транспортного средства. Рулевое устройство содержит задающие направляющие 12 и 13, установленные взаимно перпендикулярно в корпусе 14 на осях 15 и 16 и связанные с поворотной частью задатчиков 17 и 18. В центре пересечения осей направляющих 12. 13 шарнирно закреплен двухплечий рычаг 19. Верхнее плечо рычага 19 представляет собой копирный палец, подвижно связанный с пазами 20, 21 направляющих 12, 13 и с пазами 22, 23. выполненными в крышке 24 корпуса рулевого устройства. Задатчики 17 и 18 связаны с соответствующими приводами 7 и 10 поворота колес. Криволинейный паз 22 предназначен для обеспечения согласованного поворота колес в режиме продольного движения - маневрирования. Прямолинейный паз 23 предназначен для обеспечения плоскопараллельного поворота ведущи х колес на 90° для режима поперечного перемещения. Длину пазов 22 и 23 выбирают, исходя из необходимости обеспечения максимальных отклонений рулевого рычага (при нахождении его копирного пальца в крайних точках пазов). Нахождению копирного пальца в левой крайней точке паза 22 соответствует положение колес для разворота транспортного средства вокруг своего центра пробив часовой стрелки, т.е. соответствует максимальному углу поворота колес левого борта. Аналогично, нахождение копирного пальца в правой крайней точке паза 22 соответствует максимальному углу поворота колес правого борта для разворота транспортного средства вокруг своего центра по часовой стрелке. Точка пересечения средних линий пазов 22 и 23 в плане совпадает с центром пересечения осей 15 и 16. Нахождение в этой точке копирного пальца соответствует исходному положению колес, т.е. когда они параллельны продольной оси транспортного средства. Оси координат, относительно которых определяется положение пазов 22 и 23 на крышке рулевого устройства, в плане совпадают с осями задающих направляющих. Нахождение копирного пальца в крайней точке паз 23 соответствует положению всех колес перпендикулярно продольной оси транспортного средства. На нижнем плече рычага 19 закреплена криволинейная направляющая 25, выполненная с возможностью взаимодействие с толкателем 26 выключателя 27 при нахождении рулевого рычага в промежуточных точках паза 23 (за исключением его крайних точек). Вместе они образуют узел блокировки приводов тяги при недопустимом положении колес. Длина дугообразной части криволинейной направляющей 25 соответствует углу, образованному рулевым рычагом при его нахождении в крайних положениях паза 23, включая положение в точке пересечения средних линий пазов. Управление поворотом колес напольного транспортного средства производят путем перемещения рулевого рычага 19 в пазах 22 или 23 рулевого устройства 11. При этом рулевой рычаг 19, взаимодействуя с направляющими 12 и 13, поворачивает их и связанные с ними поворотные части задатчиков 17 и 18. Сигналы от задатчиков 17 и 18 обеспечивают включение приводов 7 и 10 через редукторы 5, 6 и 8, 9 поворот связанных с ними колес 1, 3 и 2, 4 на соответствующие углы. В данном описании приведен один из возможных видов связи между рулевым устройством и управляемыми колесами (электрическая связь). В принципе возможна и непосредственная кинематическая связь между задающими направляющими и управляемыми колесами, что не меняет сути предложения. Для уменьшения износа колес при повороте они могут быть выполнены с возможностью обкатывания вокруг центра поворота. При движении транспортного средства в продольном направлении (фиг. 6) маневрирование осуществляют путем перемещения рулевого рычага 19 в пазу 22. Ориентация относительно задающих направляющих и форма криволинейного паза 22 обеспечивают поворот каждой пары диагонально расположенных колес (ведущи х и ведомых) в разные стороны от исходного положения на различные углы, соответствующие требуемой кривизне разворота транспортного средства (фиг. 7, 8). Для обеспечения движения транспортного средства в поперечном направлении (движение "крабом") (фиг. 9) рулевой рычаг 19 перемещают из исходного положения в крайнюю точку паза 23. Так как паз 23 находится на биссектрисе координатного угла, находящегося между координатными углами, в которых находится паз 22 (в соседней четверти), то при этом направление поворота одной из задающих направляющих меняется на обратное. Это обеспечивает поворот каждой пары диагонально расположенных колес, в том числе ведущи х, в одну сторону от исходного положения и на один и тот же угол. Перевод колес из исходного положения в положение для поперечного движения и наоборот осуществляется при отключенных приводах ведущих колес. Для предотвращения недопустимого включения приводов ведущи х колес при указанной смене режима движения служит выключатель 27 и криволинейная направляющая 25. При нахождении рулевого рычага 19 в промежуточных положениях паза 23 криволинейная направляющая 25 воздействует на толкатель 26, обеспечивая срабатывание выключателя 27 и отключение связанных с ним приводов ведущи х колес. После поворота колес на 90° выключатель 27 возвращается в исходное положение, обеспечивая тем самым включение приводов ведущи х колес для движения в требуемом поперечном направлении (вправо или влево).
ДивитисяДодаткова інформація
Назва патенту англійськоюFloor four-wheeled transport vehicle
Автори англійськоюHrenader Mykhailo Yukhymovych, Kokhan Ivan Mykhailovych, Samonin Anatolii Vasyliovych, Subbotin Yurii Petrovych, Shneider Volodymyr Lvovych, Volodarskyi Viktor Tymofiiovych
Назва патенту російськоюНапольное четырехколесное транспортное средство
Автори російськоюГренадер Михаил Ефимович, Кохан Иван Михайлович, Самонин Анатолий Васильевич, Субботин Юрий Петрович, Шнейдер Владимир Львович, Володарский Виктор Тимофеевич
МПК / Мітки
МПК: B62D 7/14
Мітки: підлоговий, засіб, чотирьохколісний, транспортний
Код посилання
<a href="https://ua.patents.su/6-2507-pidlogovijj-chotirokhkolisnijj-transportnijj-zasib.html" target="_blank" rel="follow" title="База патентів України">Підлоговий чотирьохколісний транспортний засіб</a>
Автоматичний підлоговий транспортний засіб

Номер патенту: 176
Опубліковано: 30.04.1993
Автори: Орлов Борис Арсентьович, Володарський Віктор Тимофійович, Бобиляк Микола Васильович, Гренадер Михайло Юхимович
МПК: B60K 31/00
Мітки: засіб, транспортний, автоматичний, підлоговий
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я 1. Автоматическое напольное транспортное средство, содержащее ведущие и ведомые колеса, одни из которых, расположенные по одному из бортов, имеют общий привод поворота, один из блоков для считывания сигналов путевых меток, подключенный выходом к одному из входов дешифратора, датчики углов поворота колес и формирователь управляющих сигналов приводами ведущих колес, о т л и ч а ю щ е е с я тем, что,...
Транспортний засіб

Номер патенту: 225
Опубліковано: 30.04.1993
Автори: Графська Олена Миколаївна, Майдачевський Юрій Петрович, Соколов Сергій Іванович
МПК: B62D 43/00, B62D 25/08, B60R 21/00
Мітки: транспортний, засіб
Формула / Реферат:
Формула изобретения1. Способ получения материала для дренажа мембранного газоразделительного элемента путем пропитки трикотажного полотна полиэтилентерефталатных нитей составом на основе термореактивной смолы, катализатора отверждения и воды, отличающийся тем, что, с целью повышения его производительности продольной газопроницаемости, трикотажное полотно выполняют переплетение - сукно-цепочка-сукно, а пропитку осуществляют составом,...
Самоскидний транспортний засіб

Номер патенту: 1498
Опубліковано: 25.07.1994
Автори: Нестеровський Валентин Григорович, Бараковських Олександр Іванович, Пишкін Віктор Кирилович, Нестеренко Анатолій Митрофанович, Сенюшов Володимир Михайлович
МПК: B60P 1/00
Мітки: засіб, самоскидний, транспортний
Формула / Реферат:
Самосвальное транспортное средство, содержащее опрокидывающийся назад кузов и смонтированный в задней части кузова приводной винтовой конвейер с выгрузной горловиной, расположенной с боковой стороны кузова и смещенной при опущенном кузове вперед относительно оси его поворота, отличающееся тем, что плоскость, проходящая через центр выгрузной горловины и ось поворота кузова при опущенном кузове смещена от вертикали вперед на угол, превышающий...
Транспортний засіб

Номер патенту: 193
Опубліковано: 30.04.1993
Автори: Баранов Олександр Андрійович, Гончаров Микола Іванович, Папашев Олег Хайрулович, Стешенко Володимир Петрович
МПК: B62D 43/00, B62D 25/08
Мітки: засіб, транспортний
Формула / Реферат:
Формула изобретения1. Транспортное средство, содержащее кузов, разделенный перегородками на пассажирский, багажный и моторные отсеки, последний из которых образован поперечной и фронтальной панелями, боковинами кузова, его днищем и капотом, образующим с боковыми и фронтальной панелями соответственно боковые и фронтальную линии разъема, при этом в моторном отсеке размещены поперечно расположенный силовой агрегат и горизонтально...
Транспортний засіб

Номер патенту: 2883
Опубліковано: 26.12.1994
Автори: Зуєв Микола Данилович, Нестеровський Валентин Григорович, Нестеренко Антолій Митрофанович, Д'яконов Павло Павлович
Мітки: транспортний, засіб
Формула / Реферат:
Транспортное средство, содержащее смонтированные на шасси поворотный в вертикальной плоскости кузов, оборудованный шнековым конвейером с приводом от гидромотора, гидроподъемник кузова, гидронасос для подачи жидкости в гидромотор и гидроподъемник, основной гидрораспределитель, сообщенный с гидроподъемником и с со сливом, отличающееся тем, что средство снабжено дополнительным двухпозиционным трехлинейным гидрораспределителем с подпружиненным...
Попередній патент: Балон
Наступний патент: Улаштування для відділення плодів від грунтових грудок
Випадковий патент: Вітроенергетична установка