Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30200
Опубліковано: 15.05.2003
Автори: Плита Олександр Андрійович, Черняк Сергій Іванович, Беляєва Галина Григорівна
Формула / Реферат
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі осі візира, встановленого на рухомій основі, наприклад на шоломі оператора, при суміщенні перехрестя візира з ціллю, який відрізняється тим, що вимірюють величини швидкості кутового повороту відносно трьох взаємно перпендикулярних осей рухомої основи, а кути вертикального ![]() та горизонтального
та горизонтального ![]() візування визначають в базовій системі координат із таких співвідношень:
візування визначають в базовій системі координат із таких співвідношень:
де:
![]() - кут повороту голови оператора у зв’язаній системі координат рухомої основи:
- кут повороту голови оператора у зв’язаній системі координат рухомої основи:
![]()
![]() - вимірювані швидкості кутового повороту рухомої основи відносно трьох взаємно перпендикулярних осей зв’язаної системи координат;
- вимірювані швидкості кутового повороту рухомої основи відносно трьох взаємно перпендикулярних осей зв’язаної системи координат;
![]() - часові інтервали виконання вимірювання швидкостей кутового повороту рухомої основи.
- часові інтервали виконання вимірювання швидкостей кутового повороту рухомої основи.
Текст
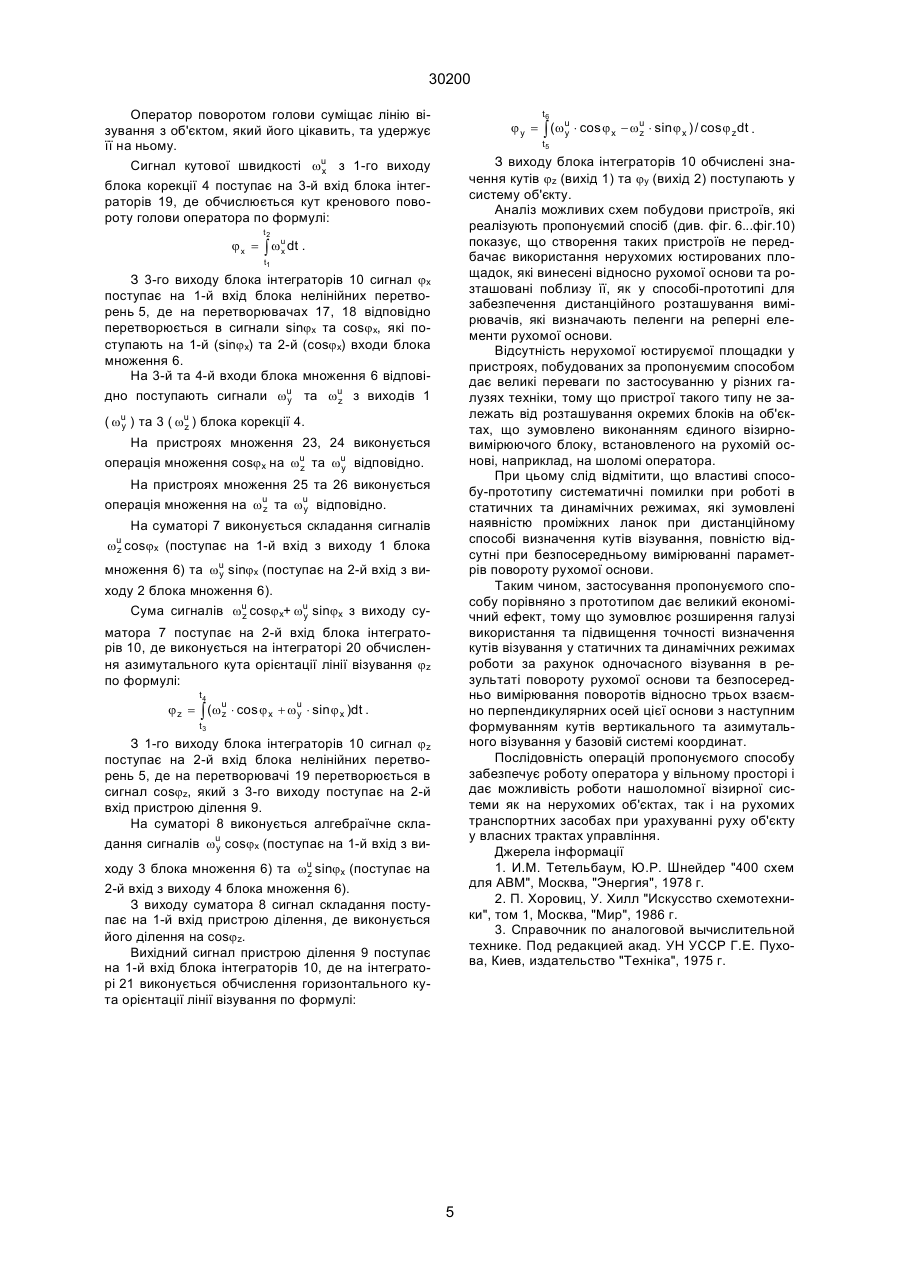
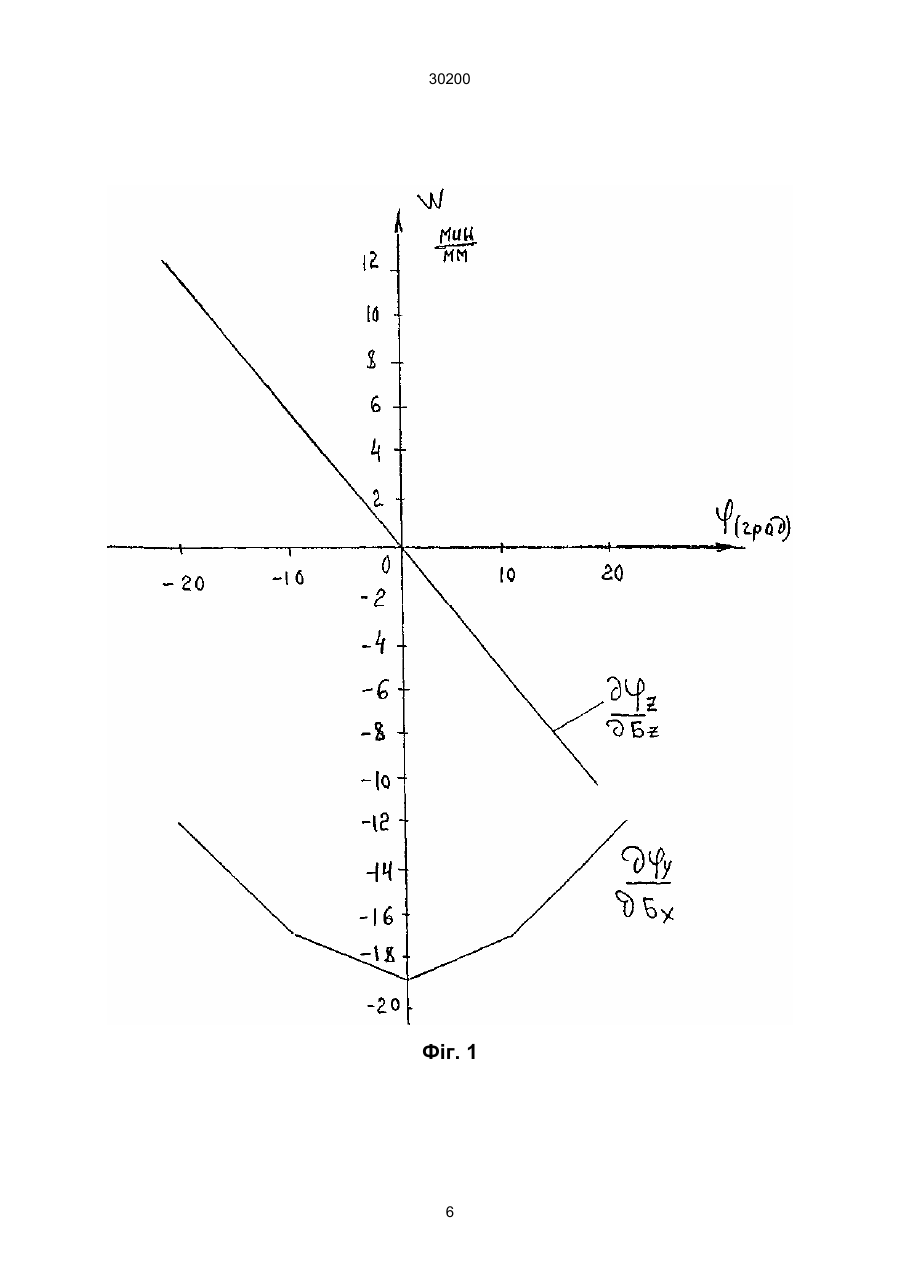
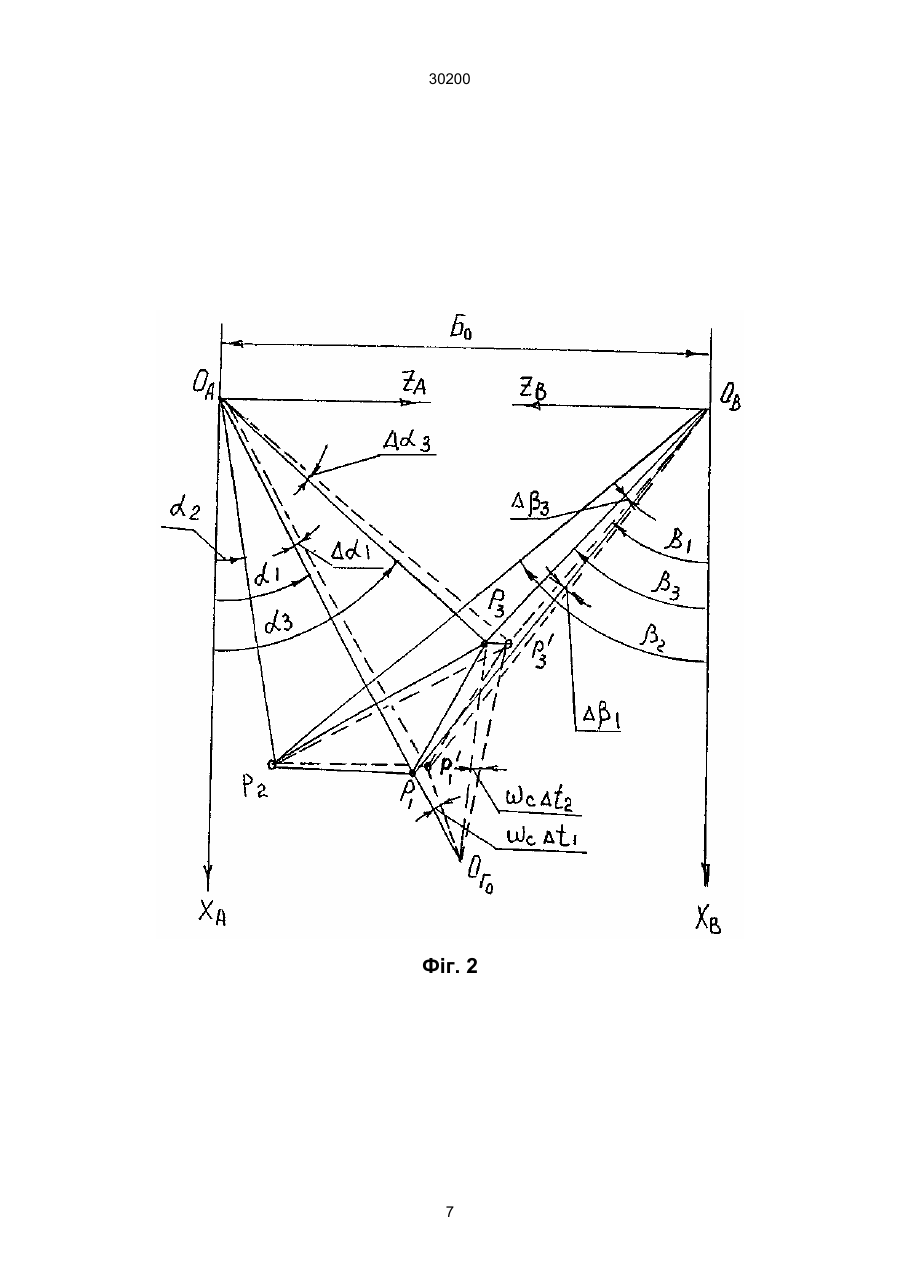
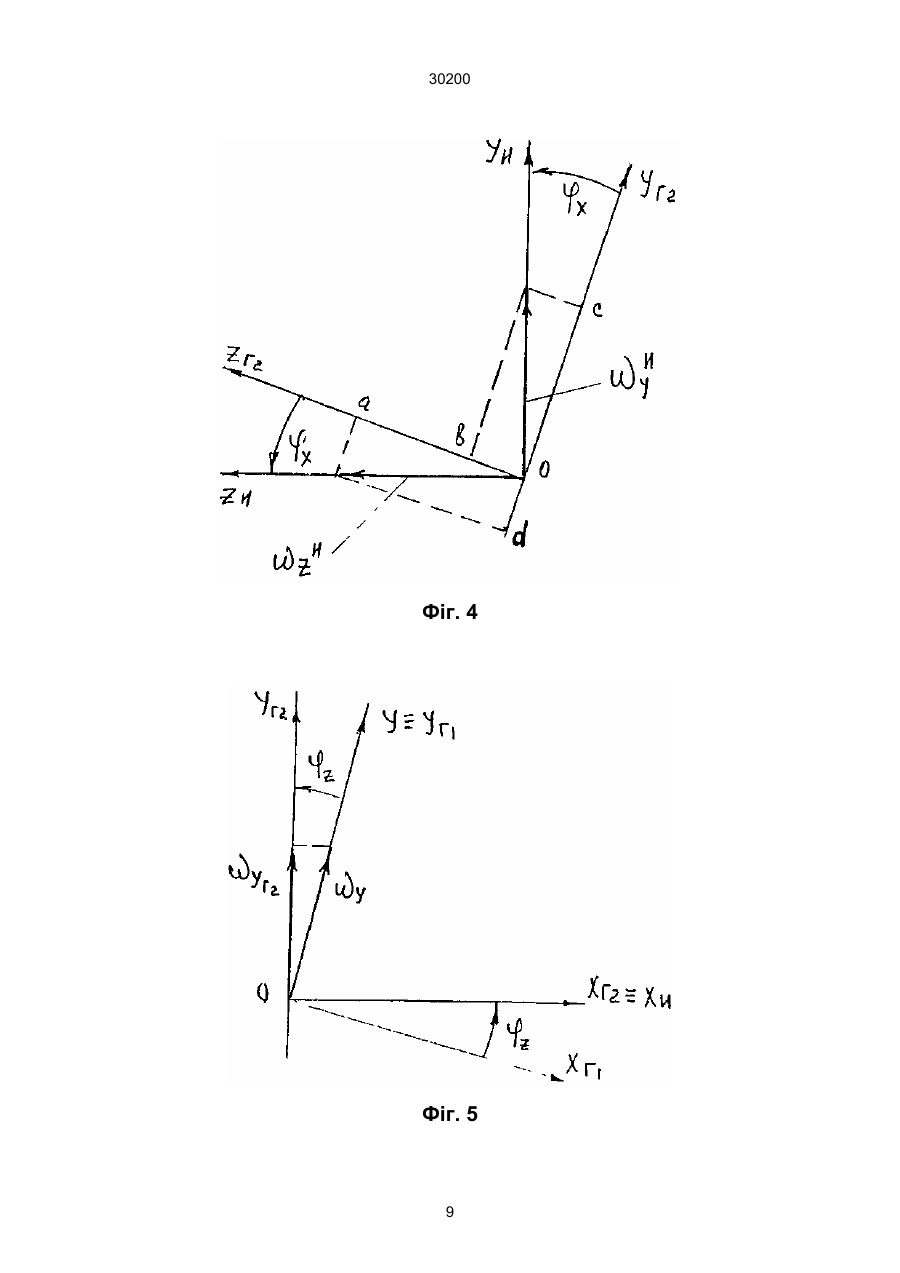
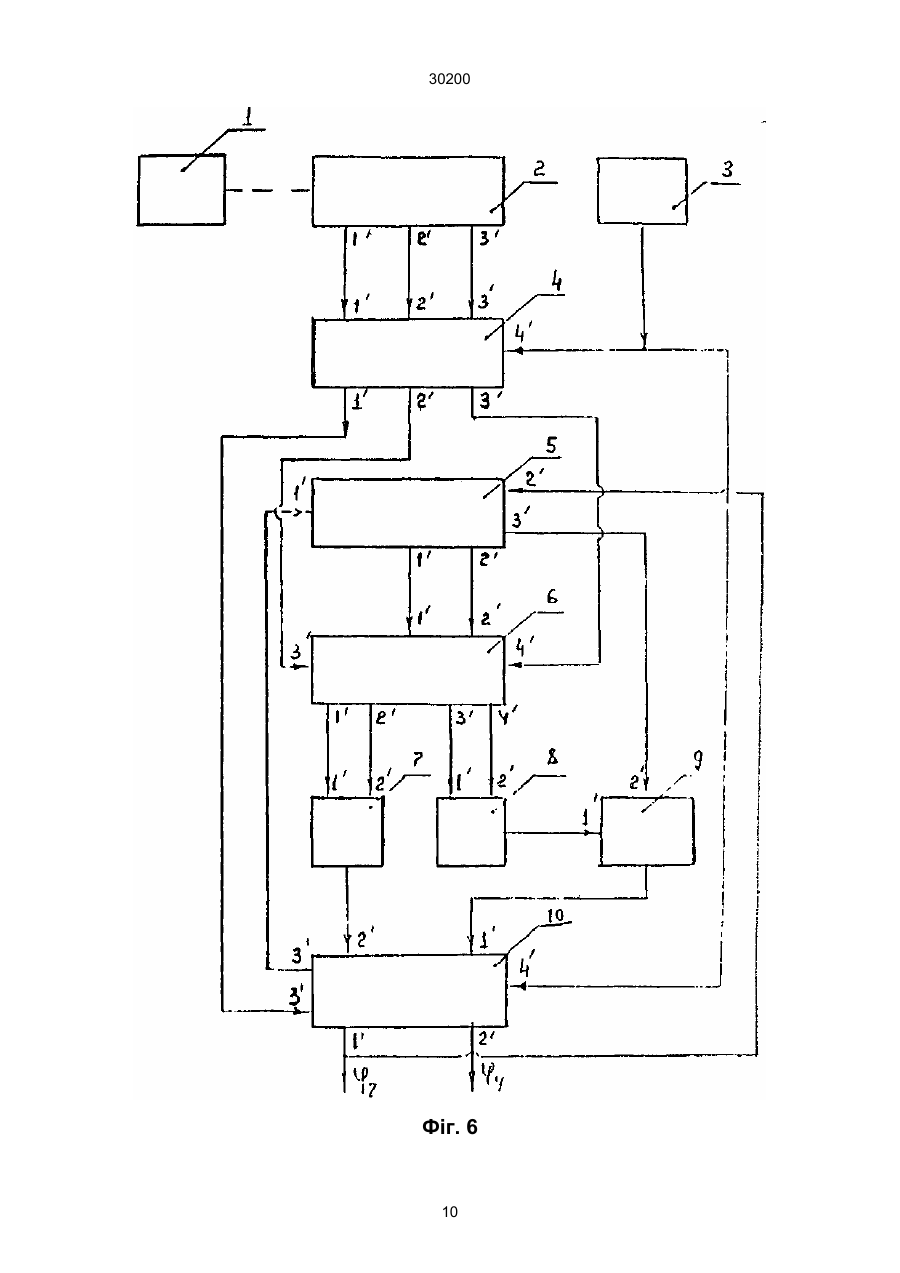
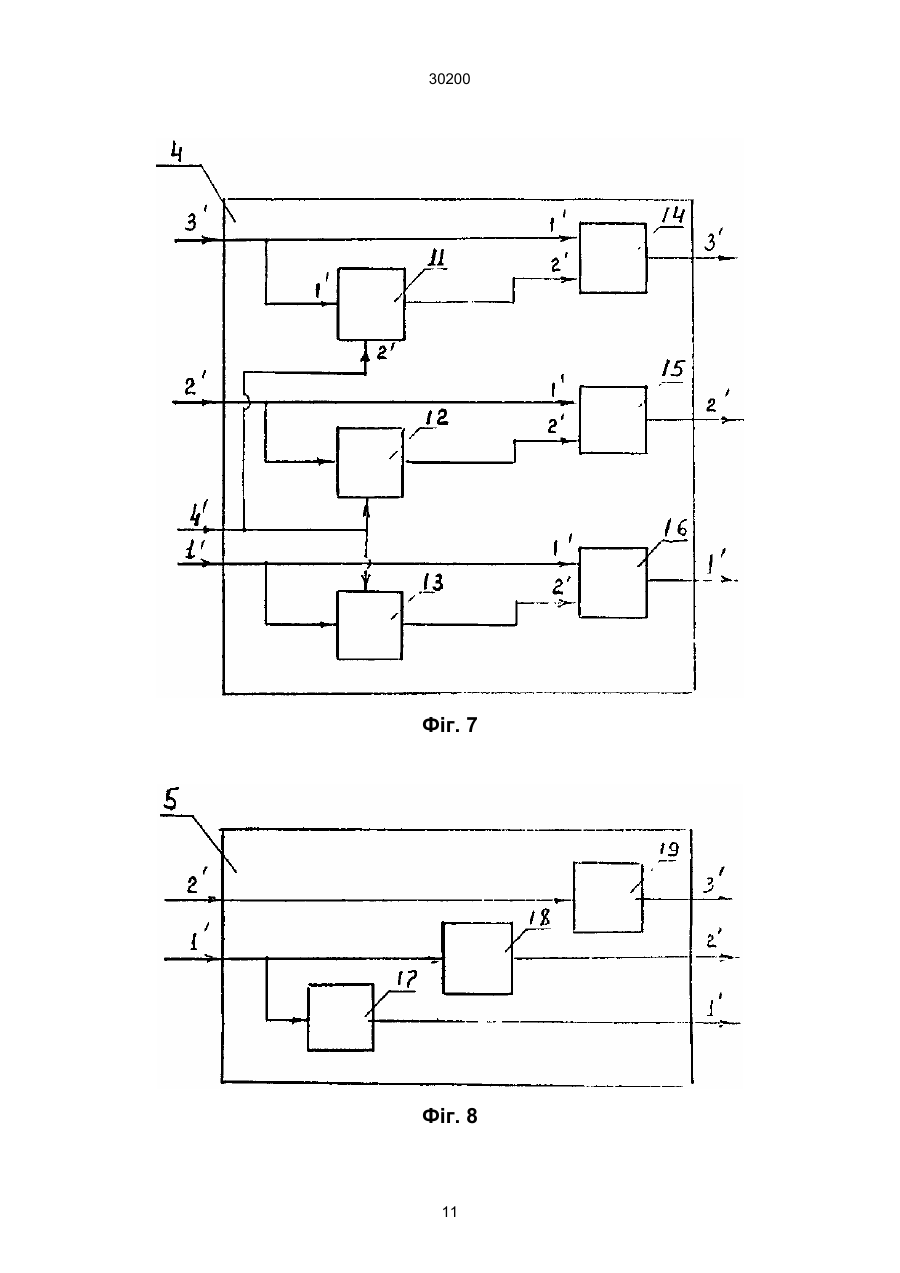
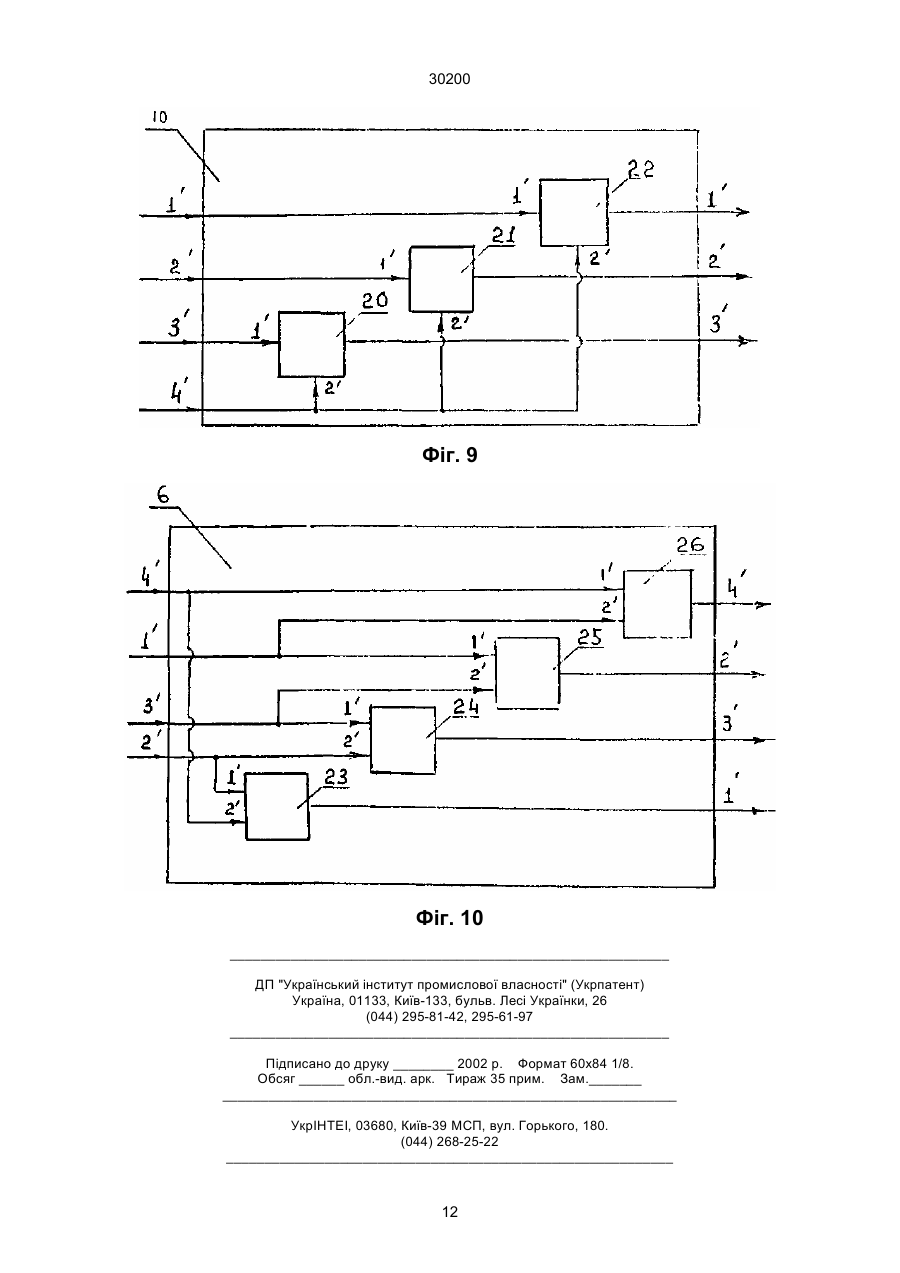
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі осі візира, встановленого на рухомій основі, наприклад, на шоломі оператора, при суміщенні перехресті візиру з ціллю, який відрізняється тим, що вимірюють величини швидкості кутового повороту відносно трьох взаємноперпендикулярних осей рухомої основи, а кути вертикального jz та горизонтального jy візування визначають в базовій системі координат із таких співвідношень: 30200 помилки способу-прототипу виникають в наслідок кутових та лінійних коливань голови оператора на об'єкті, а також при візуванні об'єктів, які рухаються відносно оператора з кутовою швидкістю wс під час проведення вимірювання пеленгів. Схема виникнення помилок способу-прототипу зображена на фіг. 2. Зі схеми фіг. 2 видно, що після вимірювання пеленгу на реперний елемент Р2, момент вимірювання якого співпадає, наприклад, з початком циклу вимірювання ( Dt вим0 = 0 ), оператор, голова яко вимогам. Наприклад, такий спосіб неможливо застосувати для видачі кутів візування оператором системам в польових умовах. До недоліків розглядаємих систем належать, також і інші хиби. Найбільш істотним з них є: обмеження діапазону переміщення і повороту голови оператора, що зумовлено складністю забезпечення великого поля зору вимірювачів при малих габаритах використання пристроїв. На основі викладеного вище можна зробити висновок, що усунення зазначених недоліків дуже актуально в теперішній час, так як значно розширює галузь застосування нашоломних візирних систем, побудованих на таких способах і дає можливість застосування їх в різних галузях техніки та на різних об'єктах, а також і в польових умовах. Найбільш близьким по технічному рішенню до запропонованого способу з відомих аналогів є спосіб визначення кутів візування, описаний в матеріалах патенту США № 3.375.375 при створенні пристрою визначення орієнтації осі візира, який розташовано на шоломі оператора. У відповідальності до описаного способу при накладенні перехрестя на ціль вимірюють за допомогою формувачів віялових пучків пеленги на реперні елементи, після чого визначають кутові координати орієнтації осі візира (jy, jz) по виміряним пеленгам на реперні елементи, відомій базовій відстані між формувачами віялових пучків та параметрам розміщення реперних елементів відносно осі візира. Для застосування способу-прототипу необхідна наявність вимірювачів, розташованих на нерухомій основі та винесених відносно рухомої основи з розміщеними на ній реперними елементами. Однак розташування нерухомої площадки поблизу оператора та точна юстировка вимірювачів відносно базової системи координат не завжди можлива в умовах все зростаючого застосування нашоломних візирних пристроїв в різних галузях техніки. Наприклад, визначення та видача кутів візування в польових умовах. В таких умовах застосування способу-прототипу неможливо. Необхідно застосування другого способу визначення кутів візування, який дасть можливість сумістити пристрій для вимірювання кутів з місцем розташування візиру. При цьому слід відмітити значні статистичні та динамічні помилки способу-прототипу. Виникнення статичних помилок зумовлено наявністю помилок кутового та лінійного розташування формувачів віялових пучків та реперних елементів, а також помилок вимірювання пеленгів. Зміна статичних помилок зумовлена відхиленням голови оператора від нульової лінії візування. Для приклада на фіг. 1 представлені криві функціональної залежності від¶j y ¶j z ношень передачі W / , в вихідні кути при¶Б х ¶Б z го виконує коливання відносно фізіологічного центру Ог або супроводжує ціль з кутовою швидкістю wс, за час який минає до відліку наступного пеленгу ( Dt1 ¹ 0 ) на реперний елемент Pt, повернеться відносно центру голови на кут wс×Dt1, тобто вимірювання пеленгу на реперний елемент Р1 відбувається при зміщенні його в точку Р1'. Аналогічно відбувається вимірювання пеленгу на реперний елемент P3 при зміщенні його в точку Р3'. Таким чином, при застосуванні способу-прототипу за рахунок необхідності дистанційного вимірювання пеленгів на реперні елементи рухомої основи єдиним вимірювальним каналом з властивим йому зміщенням моментів вимірювання в часі, відбувається перекручування реального контуру розміщення реперних елементів (Р2Р1'Р3' замість Р2Р1Р3), що приводить до значних динамічних помилок визначення кутів візування. Розрахунок помилок показує, що при використанні способу-прототипу динамічна помилка визначення кутів візування в умовах супроводження цілі оператором з кутовою швидкістю wс=20°/с, досягає 50' при заданій зоні лінійних та кутових переміщень. Таким чином, способу-прототипу властиві слідуючі істотні недоліки: 1. Обмеження галузі застосування в зв'язку з необхідністю застосування нерухомої площадки поблизу рухомої основи, тобто проведення вимірювання пеленгів за допомогою вимірювачів, дистанційно винесених відносно рухомої основи. 2. Обмеження діапазону переміщення та повороту голови оператора, що зумовлено складністю забезпечення великого поля зору вимірювачів при малих габаритах виконання пристроїв. 3. Значні статичні помилки, які зумовлені підвищенням передаточних відношень параметрів, які визначають кути візування в залежності від підвищення кута відхилення оператора від нульової лінії візування. 4. Виникнення динамічних помилок при супроводі цілі під час вимірювання пеленгів на nреперних елементів з одної точки пеленгування. В пропонуємому винаході вирішувались завдання розширення галузі застосування способу визначення кутів візування в різних галузях науки та техніки з підвищенням точності визначення кутів азимутального jу та вертикального jz візування в статичних та динамічних режимах роботи. Рішення поставленого завдання досягається тим, що вимірювання параметрів повороту рухомої основи навколо трьох осей системи відліку даної основи з послідуючим підрахунком вимірюваних параметрів wu , wu , wu при формуванні кутів візуy x z строю (jy, jz) похибок DБх, DБz встановлення вимірювачів пеленгів на базову Б0 (Бх, Бz) відстань в залежності від відхилення голови оператора в горизонтальній (jу) і вертикальній (jz) площині базової системи координат. При цьому похибки вихідних кутів (Djy, Djz) визначаються наступним чи¶j y ¶j z × DБ z . Динамічні ном: Dj y = × DБ х , Dj z = ¶Б z ¶Б х 2 30200 вання jу, jz в базовій системі координат на відміну від способу-прототипу, де вимірювання параметрів розвороту рухомої основи відбувається з нерухомої площадки дистанційно. Сутність винаходу заключається в тому, що в відомій спосіб визначення кутів візування нашоломною візирною системою, який містить в собі визначення орієнтації осі візира, розташованого на рухомій основі, наприклад на шоломі оператора, при сполученні перехрестя візиру з ціллю введені операції вимірювання величини швидкості кутового повороту рухомої основи відносно трьох взаємно перпендикулярних осей даної основи, а кути вертикального jz та азимутального jу візування визначаються в базовій системі координат з таких співвідношень: jz = t2 u u ò ( wz × cos j x + w y × sin j x )dt На кресленнях узяті наступні позначення: OXYZ - базова система координат; jу, jz - кути візування у базовій системі координат; OA XA ZA ü ý - система відліку пеленгів на реперні OB XB Z B þ елементи, які вимірюються з точок ОА, OB у способі-прототипі; aі, bі - кутові значення пеленгів на реперні елементи, вимірювані з точок ОA, OB у способіпрототипі; Daі, Dbі - помилки вимірювання кутових значень пеленгів на реперні елементи у способіпрототипі; Рі - реперні елементи пристрою, розробленого способом-прототипом; Б0 - базова відстань між формувачами віялових пучків; DБх, DБz - помилки розташування віялових пучків в базовій системі координат; Dt1 - часовий інтервал між моментами вимірювання пеленгів на реперні елементи Р1 і Р2 по способу-прототипу; Dt2 - часовий інтервал між моментами вимірювання пеленгів на реперні елементи Р3 і Р2 по способу-прототипу; wс - кутова швидкість супроводження цілі оператора; Р1', Р3' - точки поточного розташування реперних елементів Р1, Р3 через інтервал часу Dt1, Dt2 відповідно при супроводженні цілі оператором; ОХuYuZu - система відліку при вимірюванні параметрів повороту рухомої основи; ОХгYгZг - система повороту рухомої основи; OXг1 Yг1 Zг1 ü ý - поточні положення системи розOXг 2 Yг 2 Zг 2 þ (1) t1 t4 j y = ò (wu × cos j x - wu × sin j x ) / cos j z dt , y z (2) t3 де jх - кут кренового повороту голови оператора в зв'язаній системі координат рухомої основи: t6 j x = ò wu dt , x (3) t5 wu , wu , wu - вимірювані швидкості кутового y x z повороту рухомої основи відносно трьох взаємно перпендикулярних осей зв'язаної системи координат; tn…tn-1 - часові інтервали виконання вимірювання швидкостей кутового повороту рухомої основи (n=1...6). Порівняльний аналіз пропонуємого способу та способу-прототипу показує, що вимірювання, які виконуються на самій рухомій основі в зв'язаній з нею системі відліку усуває проміжні помилки як статичного (див. фіг. 1), так і динамічного (див. фіг. 2) режимів способу-прототипу, не потребують застосування нерухомої площадки поблизу до рухомої основи та не обмежують переміщення рухомої основи. Таке рішення дає великий економічний ефект тому, що розширює діапазон застосування пропонуємого способу в різних галузях науки та техніки при підвищенні точності визначення кутів візування за рахунок вимірювання кутових поворотів відносно трьох осей рухомої основи та на самій рухомій основі. Докладний опис пропонуємого способу приведено нижче з посиланням на креслення, де дана наступна інформація: Фіг. 1 - функціональна залежність передання помилок розташування вимірювачів пеленгів на базову Б0 відстань (DБх, DБz) в вихідні кути, які визначаються по способу-прототипу (jу, jz). Фіг. 2 - схема виникнення помилок динамічного режиму способу-прототипу. Фіг. 3...Фіг. 5 - схеми перетворювання вимірюваних параметрів кутового повороту відносно трьох осей рухомої основи в базову систему координат. Фіг. 6...Фіг. 10 - схеми технічної реалізації пропонуємого способу. вороту рухомої основи при візуванні цілі. wu , wu , wu - вимірювані швидкості кутового y x z повороту рухомої основи відносно трьох взаємно перпендикулярних осей зв'язаної системи координат; w yг , w zг - швидкості розвороту рухомої осно2 2 ви навколо поточних осей y г 2 , z г 2 ; jх - кут кренового повороту голови оператора в зв'язаній системі координат рухомої основи. Відповідно до пропонуємого способу визначення кутів візування визначають орієнтацію осі візира, розташованого на рухомій основі у базовій системі координат в результаті вимірювання параметрів кутового повороту рухомої основи відносно трьох осей зв'язаної з ним системи: wu , wu , wu . y x z Операція вимірювання параметрів кутового повороту рухомої основи у зв'язаній системі координат та формування вертикального jz та азимутального jу кутів візування у базовій системі координат наочно зображено на схемах перетворення, які представлені на фіг. 3...фіг. 5. Як видно зі схеми фіг. 3 вимірювання параметрів кутового повороту рухомої основи відбувається у зв'язаній системі координат ОХuYuZu по таким параметрам: 3 30200 Лінія, яка проходить через око та центр марки є лінія візування (ЛВ). Блок вимірювання параметрів 2 складається, наприклад, з трьох датчиків кутових швидкостей (ДКШ), орієнтованих відносно трьох відповідних осей захисного шолома. Замість ДКШ можуть бути примінені, зокрема, але не виключно малогабаритні датчики типу ТВК. Блок прив'язки 3 виконано, наприклад, у вигляді комутируючої кнопки KM1-1, яка забезпечує (при натисненні) формування команди "Скид". Блок корекції 4 складається (див. фіг. 7) з трьох каналів корекції вихідних сигналів ДКШ, блока вимірювання параметрів 2, де: 11, 12, 13 - пристрої запам'ятання, які виконані, наприклад, по схемі, зображеній у розділі 4-53 [1]; 14, 15, 16 - суміруючі підсилювачі, які виконані, наприклад, зображеній на рис. 3.18 [2] (використовуються два входи). Блок нелінійних перетворень Б складається (див. фіг. 8) з трьох каналів перетворень, де: 17 - перетворювач функції sinjx; 18, 19 - перетворювач функції cosjх та cosjz відповідно. Перетворювачі функції cos можуть бути виконані, наприклад, по схемі, яка зображена на рис. В розділу 2-11-8 [1], перетворювачі функції sin - по схемі, яка зображена на рис. Б розділу 2-11-8 [1]. Блок множення 6 складається (див. фіг. 10) з чотирьох пристроїв множення 23...26, які можуть бути виконані, наприклад, по схемі, зображеній на рис. 3.10 [3]. Суматори 7 та 8 можуть бути виконані, наприклад, по схемі, зображеній на рис. 3.18 [2]. Пристрій ділення 9 може бути виконано, наприклад, по схемі, зображеній на рис. а розділу 211-9 [1]. Блок інтеграторів 10 містить в собі (див. фіг. 9) три інтегратори 21...22, які можуть бути виконані, наприклад, по схемі, зображеній на рис. 3.44а [2]. Візир 1 та блок виміру параметрів 2 розміщені на захисному шоломі оператора. Інші блоки розташовані на об'єкті. Робота пристрою відбувається таким чином. На початку циклу роботи оператор поворотом голови наводить лінію візування на реперний елемент об'єкту, який задає напрямок відліку кутів візування, та натискує кнопку блока прив'язки. При цьому на 4-ті входи блока корекції 4 та блока інтеграторів 10 надходить команда "Скид" (потенціал). Пристрої запам'ятовування 11-13 блока 4 встановлюються у режимі вводу початкових умов, якими є значення вихідних сигналів ДКШ блока 2. Інтегратори 20...22 встановлюються у нульовий режим. Після зняття команди "Скид" (кнопка відпущена) пристрої запам'ятовування 11-13 переводяться у режим схову і запам'ятовані значення вихідних сигналів ДКШ складаються (з зворотним знаком) з тими ж значеннями сигналів ДКШ на суміруючих підсилювачах (входи 1, 2) 14...16. В результаті сумірування списують накопичені сигнали помилок (часовий, температурний дрейф) ДКШ на момент прив'язки. Інтегратори 20...22 після зняття команди "Скид" встановлюються в режим інтегрування. wu - кутова швидкість відносно осі ОХu; x wu - кутова швидкість відносно осі ОYu; y wu - кутова швидкість відносно осі ОZu. z Для визначення кутів візування jу, jz в базовій системі координат ОХYZ необхідно привести вимірювані кутові швидкості у зв'язаній системі координат ( wu , wu , wu ) до базової системи коорy x z динат. У відповідності зі схемами, які зображені на фіг. 3...фіг. 5, таке перетворення можна зробити таким чином: w z = w zг 2 = Oa + Ob = wu cos j x + wu sin j x (4) z y w yг 2 = Oc - Od = wu cos j x - wu sin j x , y z (5) де jх - кут кренового повороту голови оператора у зв'язаній системі координат t2 j x = ò wu dt . x (6) t1 Кут вертикального візування jz визначається в результаті інтегрування рівняння (4): t4 j z = ò wu dt . z (7) t3 Для визначення азимутального кута у базовій системі координат необхідно проведення додаткового перетворення у відповідності зі схемою фіг. 5: w yг 2 wy = (8) cos j z t6 j y = ò w y dt (9) t5 Таким чинам, кути вертикального jz та азимутального візування jу визначаються у базовій системі координат вільного простору зв'язаного з Землею. При цьому відлік часу інтегрування t проводять від нульового положення лінії візування до моменту накладення перехрестя на ціль. При подальшому супроводженні цілі відлік часу інтегрування продовжується. Принцип роботи пропонуємого способу розглянемо на прикладі побудови пристрою, зображеного на фіг. 6, де: 1 - візир; 2 - блок вимірювання параметрів; 3 - блок прив'язки; 4 - блок корекції; 5 - блок нелінійних перетворень; 6 - блок множення; 7, 8 - суматори; 9 - пристрій ділення; 10 - блок інтеграторів. Візир 1 є оптичний коліматорний формувач, який забезпечує вивід в поле зору оператора зображення познаки візування. Складається формувач, наприклад, з напівпрозорого дзеркала, розташованого перед оком, марки (сітки), яка виконана у вигляді перехрестя або концентричних кілець, які розташовані у фокальній поверхні лінзового об'єктиву (див. Л.П. Лазарев "Оптико-электронные приборы наведения", Москва, Машиностроение, 1989 г., с. 247-250). 4 30200 Оператор поворотом голови суміщає лінію візування з об'єктом, який його цікавить, та удержує її на ньому. Сигнал кутової швидкості wu з 1-го виходу x блока корекції 4 поступає на 3-й вхід блока інтеграторів 19, де обчислюється кут кренового повороту голови оператора по формулі: t6 j y = ò (wu × cos j x - wu × sin j x ) / cos j z dt . y z t5 З виходу блока інтеграторів 10 обчислені значення кутів jz (вихід 1) та jу (вихід 2) поступають у систему об'єкту. Аналіз можливих схем побудови пристроїв, які реалізують пропонуємий спосіб (див. фіг. 6...фіг.10) показує, що створення таких пристроїв не передбачає використання нерухомих юстированих площадок, які винесені відносно рухомої основи та розташовані поблизу її, як у способі-прототипі для забезпечення дистанційного розташування вимірювачів, які визначають пеленги на реперні елементи рухомої основи. Відсутність нерухомої юстируємої площадки у пристроях, побудованих за пропонуємим способом дає великі переваги по застосуванню у різних галузях техніки, тому що пристрої такого типу не залежать від розташування окремих блоків на об'єктах, що зумовлено виконанням єдиного візирновимірюючого блоку, встановленого на рухомій основі, наприклад, на шоломі оператора. При цьому слід відмітити, що властиві способу-прототипу систематичні помилки при роботі в статичних та динамічних режимах, які зумовлені наявністю проміжних ланок при дистанційному способі визначення кутів візування, повністю відсутні при безпосередньому вимірюванні параметрів повороту рухомої основи. Таким чином, застосування пропонуємого способу порівняно з прототипом дає великий економічний ефект, тому що зумовлює розширення галузі використання та підвищення точності визначення кутів візування у статичних та динамічних режимах роботи за рахунок одночасного візування в результаті повороту рухомої основи та безпосередньо вимірювання поворотів відносно трьох взаємно перпендикулярних осей цієї основи з наступним формуванням кутів вертикального та азимутального візування у базовій системі координат. Послідовність операцій пропонуємого способу забезпечує роботу оператора у вільному просторі і дає можливість роботи нашоломної візирної системи як на нерухомих об'єктах, так і на рухомих транспортних засобах при урахуванні руху об'єкту у власних трактах управління. Джерела інформації 1. И.М. Тетельбаум, Ю.Р. Шнейдер "400 схем для АВМ", Москва, "Энергия", 1978 г. 2. П. Хоровиц, У. Хилл "Искусство схемотехники", том 1, Москва, "Мир", 1986 г. 3. Справочник по аналоговой вычислительной технике. Под редакцией акад. УН УССР Г.Е. Пухова, Киев, издательство "Техніка", 1975 г. t2 j x = ò wu dt . x t1 З 3-го виходу блока інтеграторів 10 сигнал jх поступає на 1-й вхід блока нелінійних перетворень 5, де на перетворювачах 17, 18 відповідно перетворюється в сигнали sinjx та cosjx, які поступають на 1-й (sinjx) та 2-й (соsjх) входи блока множення 6. На 3-й та 4-й входи блока множення 6 відповідно поступають сигнали wu та wu з виходів 1 y z ( wu ) та 3 ( wu ) блока корекції 4. y z На пристроях множення 23, 24 виконується операція множення cosjx на wu та wu відповідно. y z На пристроях множення 25 та 26 виконується операція множення на wu та wu відповідно. y z На суматорі 7 виконується складання сигналів wu cosjх (поступає на 1-й вхід з виходу 1 блока z множення 6) та wu sinjx (поступає на 2-й вхід з виy ходу 2 блока множення 6). Сума сигналів wu cosjх+ wu sinjx з виходу суy z матора 7 поступає на 2-й вхід блока інтеграторів 10, де виконується на інтеграторі 20 обчислення азимутального кута орієнтації лінії візування jz по формулі: t4 j z = ò (wu × cos j x + wu × sin j x )dt . y z t3 З 1-го виходу блока інтеграторів 10 сигнал jz поступає на 2-й вхід блока нелінійних перетворень 5, де на перетворювачі 19 перетворюється в сигнал соsjz, який з 3-го виходу поступає на 2-й вхід пристрою ділення 9. На суматорі 8 виконується алгебраїчне складання сигналів wu cosjх (поступає на 1-й вхід з виy ходу 3 блока множення 6) та wu sinjx (поступає на z 2-й вхід з виходу 4 блока множення 6). З виходу суматора 8 сигнал складання поступає на 1-й вхід пристрою ділення, де виконується його ділення на соsjz. Вихідний сигнал пристрою ділення 9 поступає на 1-й вхід блока інтеграторів 10, де на інтеграторі 21 виконується обчислення горизонтального кута орієнтації лінії візування по формулі: 5 30200 Фіг. 1 6 30200 Фіг. 2 7 30200 Фіг. 3 8 30200 Фіг. 4 Фіг. 5 9 30200 Фіг. 6 10 30200 Фіг. 7 Фіг. 8 11 30200 Фіг. 9 Фіг. 10 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 12
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining angles of sight by a helmet system
Автори англійськоюBieliaieva Halyna Hryhorivna, Plyta Oleksandr Andriiovych, Cherniak Serhii Ivanovych
Назва патенту російськоюСпособ определения углов визирования с помощью нашлемной системы
Автори російськоюБеляева Галина Григорьевна, Плита Александр Андреевич, Черняк Сергей Иванович
МПК / Мітки
МПК: G02B 23/00
Мітки: спосіб, системою, візування, кутів, нашоломною, визначення
Код посилання
<a href="https://ua.patents.su/12-30200-sposib-viznachennya-kutiv-vizuvannya-nasholomnoyu-sistemoyu-vizuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кутів візування нашоломною системою візування</a>
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30187
Опубліковано: 15.11.2000
Автори: Беляєва Галина Григорівна, Плита Олександр Андрійович, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: визначення, кутів, нашоломною, спосіб, візування, системою
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає в визначенні кутових координат орієнтації в просторі вісі візиру, установленого на рухомій основі, та суміщенні перехрестя візиру з ціллю, який відрізняється тим, що вимірюють величину швидкості кутового розвороту рухомої основи відносно вертикальної вісі базової системи координат, суміщують контрольні та стабілізовані мітки в полі зору візиру, а координати...
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30191
Опубліковано: 15.11.2000
Автори: Плита Олександр Андрійович, Беляєва Галина Григорівна, Черняк Сергій Іванович, Бузанов Віктор Іванович
МПК: G02B 23/00
Мітки: визначення, візування, нашоломною, спосіб, кутів, системою
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі вісі візиру, встановленного на рухомій основі, при суміщенні перехрестя візиру з ціллю, який відрізняється тим, що додатково вимірюють параметри кутового розвороту відносно двох взаємноперпендикулярних вісей рухомої основи, суміщують контрольні та стабілізовані мітки у полі зору візиру, а кути азимутального jу та...
Спосіб прицілювання нашоломною системою цілевказівки і пристрій для його реалізації
Номер патенту: 56413
Опубліковано: 15.05.2003
Автори: Черняк Сергій Іванович, Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович
МПК: F41G 3/22
Мітки: системою, спосіб, пристрій, цілевказівки, реалізації, прицілювання, нашоломною
Формула / Реферат:
1. Спосіб прицілювання нашоломною системою цілевказування, в основу якого покладене сканування простору знаходження нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів та положення n випромінюючих діодів у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розташовані випромінюючі діоди, який відрізняється тим, що за...
Спосіб визначення кутів зсуву між фазами в трифазній системі електричних величин
Номер патенту: 35179
Опубліковано: 15.03.2001
Автори: Сподін Андрій Іванович, Дзюбко Мирослав Петрович, Резніченко Тимофій Пилипович, Ходос Олександр Петрович
МПК: H02H 3/38
Мітки: величин, визначення, трифазній, фазами, кутів, спосіб, системі, зсуву, електричних
Формула / Реферат:
Спосіб визначення кутів зсуву між фазами в трифазній системі електричних величин, при якому кути зсуву між фазами відраховуються відносно вектора фази А, який відрізняється тим, що кути зсуву jAB та jAC обчислюють за формулами:де АA, AB, АC - амплітудні значення величини відповідно в...
Спосіб вимірювання кутів за допомогою гоніометра
Номер патенту: 53171
Опубліковано: 15.01.2003
Автори: Зайцев Юрій Іванович, Безвесільна Олена Миколаївна, Старцев Сергій Михайлович, Янчук Олександр Миколайович
МПК: G01B 11/26, G01B 9/10
Мітки: вимірювання, гоніометра, спосіб, кутів, допомогою
Формула / Реферат:
1. Спосіб вимірювання кутів за допомогою гоніометра, який полягає в тому, що контрольовану призму встановлюють на предметному столі гоніометра і виконують вимірювання її кутів, який відрізняється тим, що повертають призму на 180° навколо осі, яка проходить через нормаль до однієї з її граней, проводять вимірювання кутів призми в цьому положенні і знаходять середнє значення виміряних в двох положеннях кутів.2. Спосіб за п. 1, який...
Попередній патент: Двокорпусне судно “окран”
Наступний патент: Спосіб буріння свердловини та пристрій для буріння
Випадковий патент: Лікувально-профілактична зубна паста