Електронно керований пристрій для подавання ниток
Номер патенту: 49850
Опубліковано: 15.10.2002
Автори: Фекер Джозеф, Шмодде Герман, Вебер Фрідрих, Лайнс Ебергард, Кеттерер Людвіг
Формула / Реферат
1. Пристрій для подавання ниток до трикотажних машин, що характеризуються різкими змінами споживання нитки у часі, зокрема до плосков'язальних трикотажних машин, що містить: ниткоподавальний барабанчик, розміщений на шляху переміщення нитки таким чином, що нитка може на нього намотуватися, і що служить для подавання нитки визначеним чином, електричний привідний пристрій, жорстко з'єданий з ниткоподавальним барабанчиком; датчик натягу нитки, за допомогою якого генерують сигнал, що характеризує натяг нитки; регулятор з замкненим контуром, який одним із своїх стаціонарних входів з'єднаний з датчиком визначення натягу нитки і за допомогою якого керують вказаним електричним привідним пристроєм на основі сигналу натягу нитки (фактичного сигналу), який відрізняється тим, що він додатково включає пристрій формування сигналу, що містить інформацію про майбутнє споживання нитки, а регулятор з замкненим контуром містить додатковий стаціонарний вхід, який з'єднаний з виходом вказаного пристрою формування сигналу, при цьому регулятор з замкненим контуром виконаний з можливістю оброблення додатково до сигналу натягу нитки і/або замість нього щонайменше одного додаткового сигналу, що містить інформацію про майбутнє споживання нитки.
2. Пристрій для подавання нитки за п. 1, який відрізняється тим, що вказаний пристрій формування сигналу виконаний з можливістю формування сигналу, що містить тільки дані про споживання нитки в найближчий час.
3. Пристрій для подавання нитки за п. 1, який відрізняється тим, що регулятор з замкненим контуром виконаний з можливістю формування сигналу керуючого значення, що змінюється у часі, на підставі вказаного додаткового сигналу.
4. Пристрій для подавання нитки за п. 3, який відрізняється тим, що регулятор з замкненим контуром виконаний з можливістю формування сигналу керуючого значення, що на короткий час зменшує натяг нитки, безпосередньо перед різким початком стадій високого споживання нитки.
5. Пристрій для подавання нитки за п. 3, який відрізняється тим, що регулятор з замкненим контуром виконаний з можливістю формування сигналу керуючого значення, що на короткий час збільшує натяг нитки, безпосередньо перед різким початком стадії відсутності споживання нитки.
6. Пристрій для подавання нитки за п. 1, який відрізняється тим, що привідний пристрій запускають до початку споживання нитки і зупиняють до завершення споживання нитки.
7. Пристрій для подавання нитки за п. 1, який відрізняється тим, що вказаний пристрій формування сигналу виконаний з можливістю формування сигналу, що містить інформацію про майбутнє споживання нитки, що змінюється у часі.
8. Пристрій для подавання нитки за п. 7, який відрізняється тим, що вказаний пристрій формування сигналу виконаний у вигляді щонайменше одного датчика відстежування ходу і/або швидкості переміщення каретки плосков'язальної машини, який розташований на плосков'язальній машині у зоні поворотної точки каретки.
9. Пристрій для подавання нитки за п. 1, який відрізняється тим, що регулятор з замкненим контуром виконаний з можливістю формування сигналу з профілем керуючих значень, що являє собою значення натягу нитки, яке для кожного конкретного випадку постійне, а для плосков'язальних трикотажних машин є різним для ходу вперед і зворотного ходу ниткопровідника.
10. Пристрій для подавання нитки за п. 1, який відрізняється тим, що вказаний пристрій формування сигналу виконаний як модуль або як модулюючий блок регулятора з замкненим контуром, який своїм входом з'єднаний з датчиком натягу нитки і виконаний з можливістю аналізування сигналів, що надходять до нього від датчика натягу нитки, виробляння прогнозної оцінки рівня натягу нитки на визначений прогнозований період часу, і генерування сигналу споживання нитки, який виступає попереду фактичного споживання нитки.
11. Пристрій для подавання нитки за п. 1, який відрізняється тим, що сигнал, отриманий на підставі реального натягу нитки і змінений на підставі його наступної зміни, використовують як сигнал натягу нитки.
12. Пристрій для подавання нитки за п. 1, який відрізняється тим, що час пуску і/або зупинки для привідного пристрою заданий рухомими елементами трикотажної машини.
13. Пристрій для подавання нитки за п. 1, який відрізняється тим, що вказаний пристрій формування сигналу виконаний у вигляді датчика визначення руху елемента плосков'язальної трикотажної машини, який встановлений на цьому елементі.
14. Пристрій для подавання нитки за п. 1, який відрізняється тим, що потрібну подачу нитки кількісно визначають на підставі даних, занесених у пристрій пам'яті узорів розімкненої системи керування трикотажної машини.
15. Пристрій для подавання нитки за п. 1, який відрізняється тим, що датчик натягу нитки виконаний практично без вимірювального ходу, тобто його чутливий елемент, що контактує з ниткою, має незначний вимірювальний хід.
16. Пристрій для подавання нитки за п. 15, який відрізняється тим, що шлях між ниткоподавальним барабанчиком і трикотажною машиною визначений елементами датчика натягу нитки, які, за винятком чутливого елементу датчика натягу нитки, обперті на непружні опорні елементи.
17. Пристрій для подавання нитки за п. 1, який відрізняється тим, що між подавальним барабанчиком і трикотажною машиною він містить нитконакопичувальний магазин, утворений відрізком шляху нитки між ниткоподавальним барабанчиком і в'язальним постом, на якому відрізок нитки направлений так, що вільно розтягнутий.
18. Пристрій для подавання нитки за п. 1, який відрізняється тим, що привідним пристроєм є кроковий двигун.
19. Пристрій для подавання нитки за п. 1, який відрізняється тим, що електричним привідним пристроєм є дисковий роторний двигун.
20. Пристрій для подавання нитки за п. 1, який відрізняється тим, що електричний привідний пристрій і регулятор з замкненим контуром виконані з забезпеченням можливості роботи привідного пристрою у двох напрямках обертання.
21. Пристрій для подавання нитки за п. 10, який відрізняється тим, що між датчиком натягу нитки і регулятором з замкненим контуром розміщений фільтр, з'єднаний з цим датчиком.
22. Пристрій для подавання нитки за п. 21, який відрізняється тим, що фільтр виконаний у вигляді відсічного фільтра частотних діапазонів перешкод.
Текст
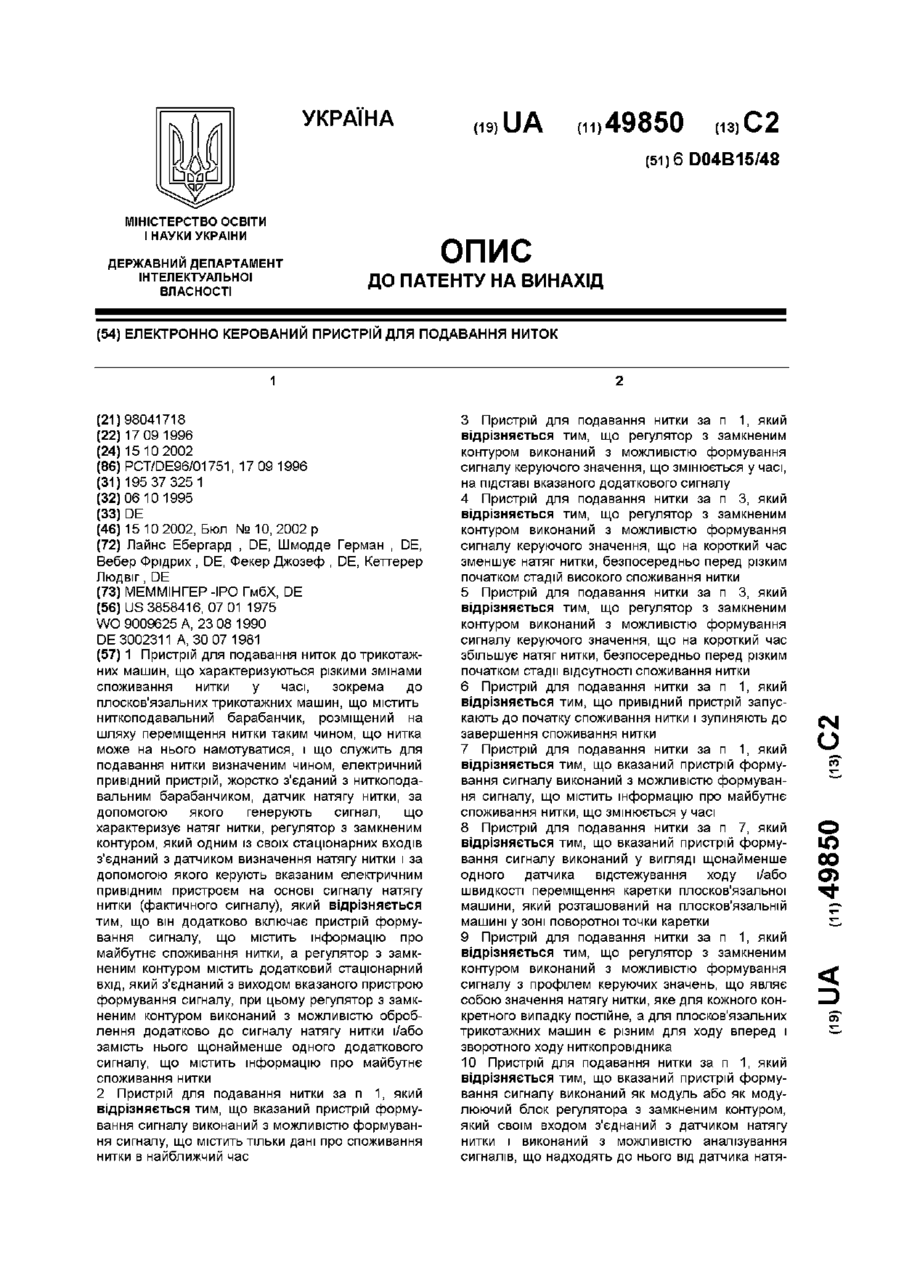
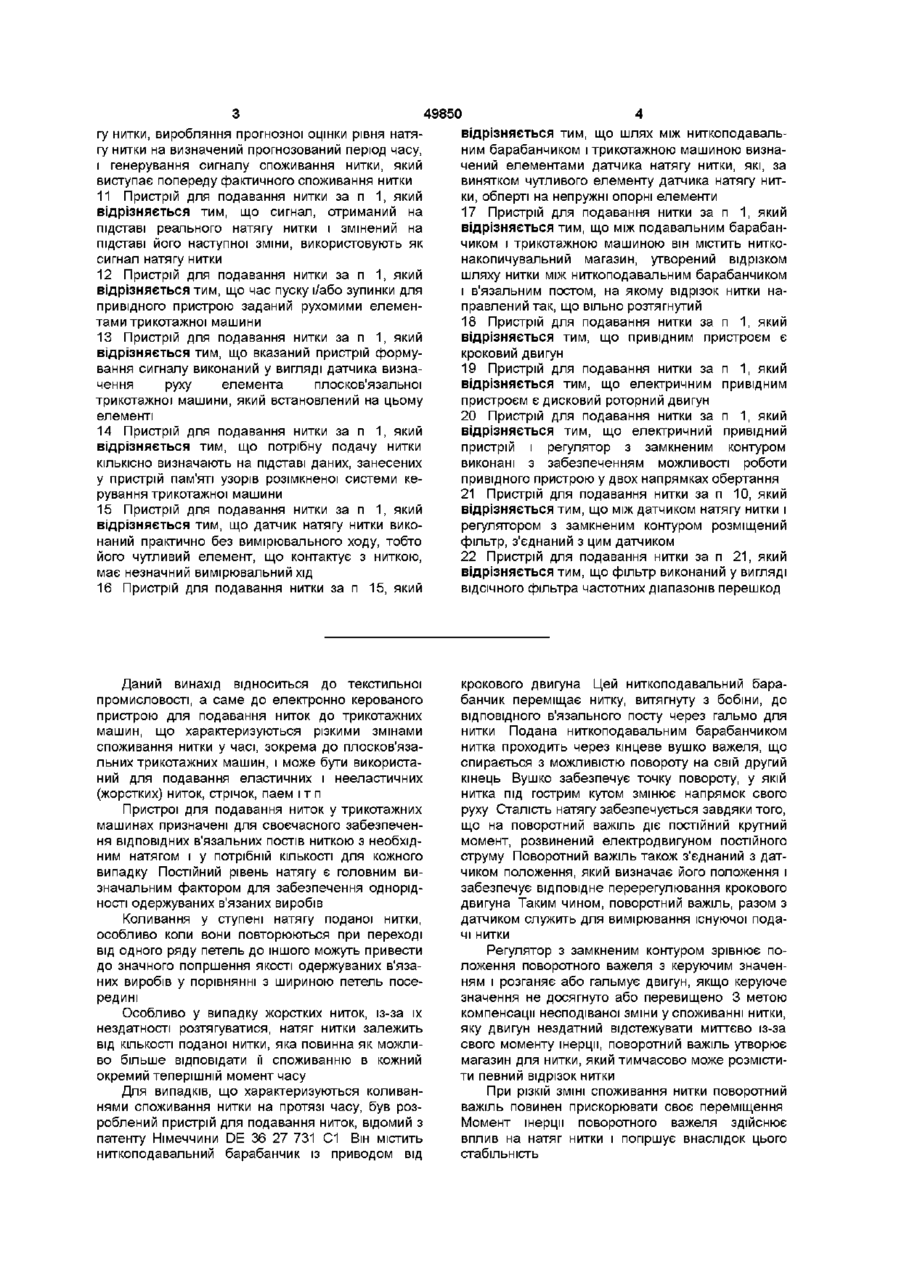
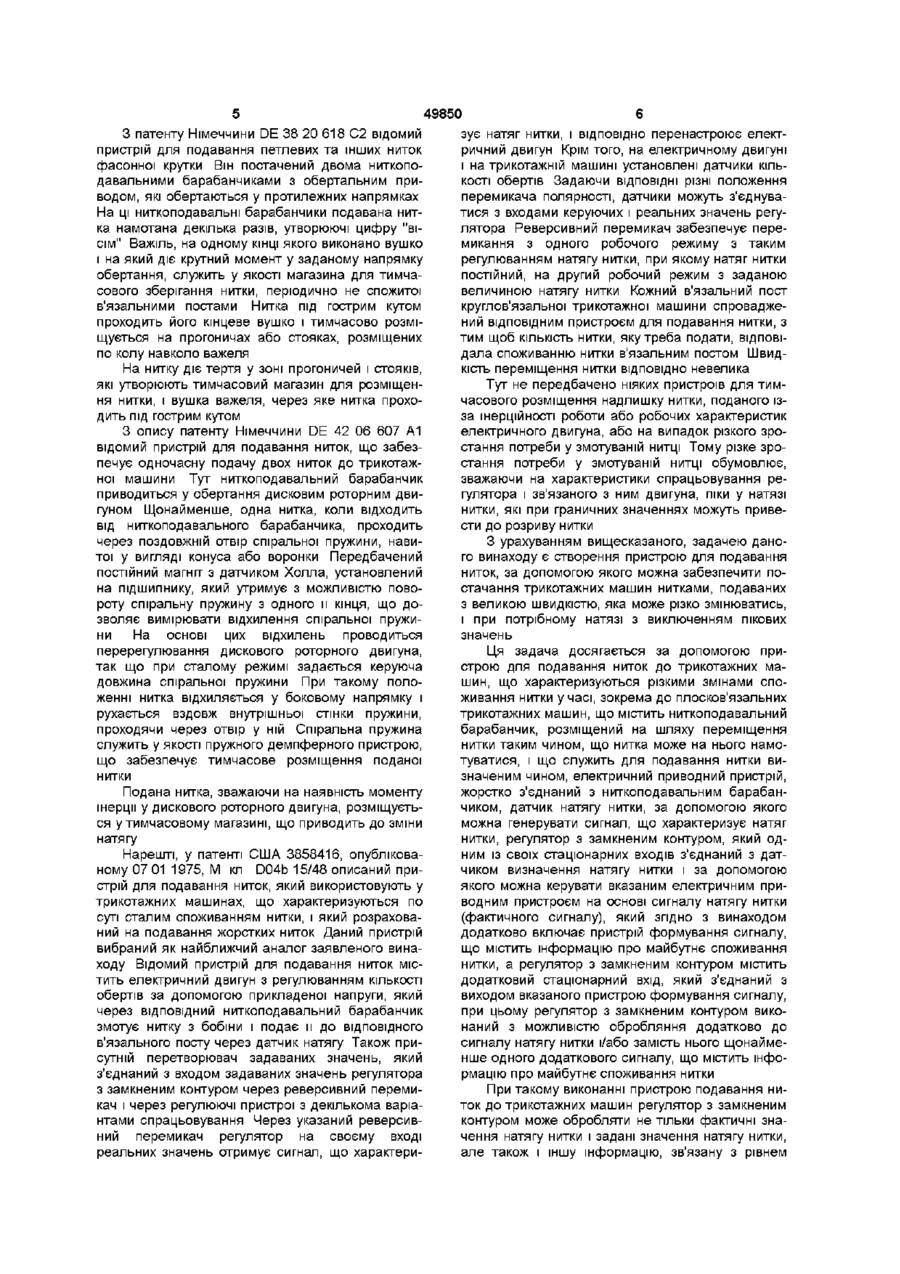
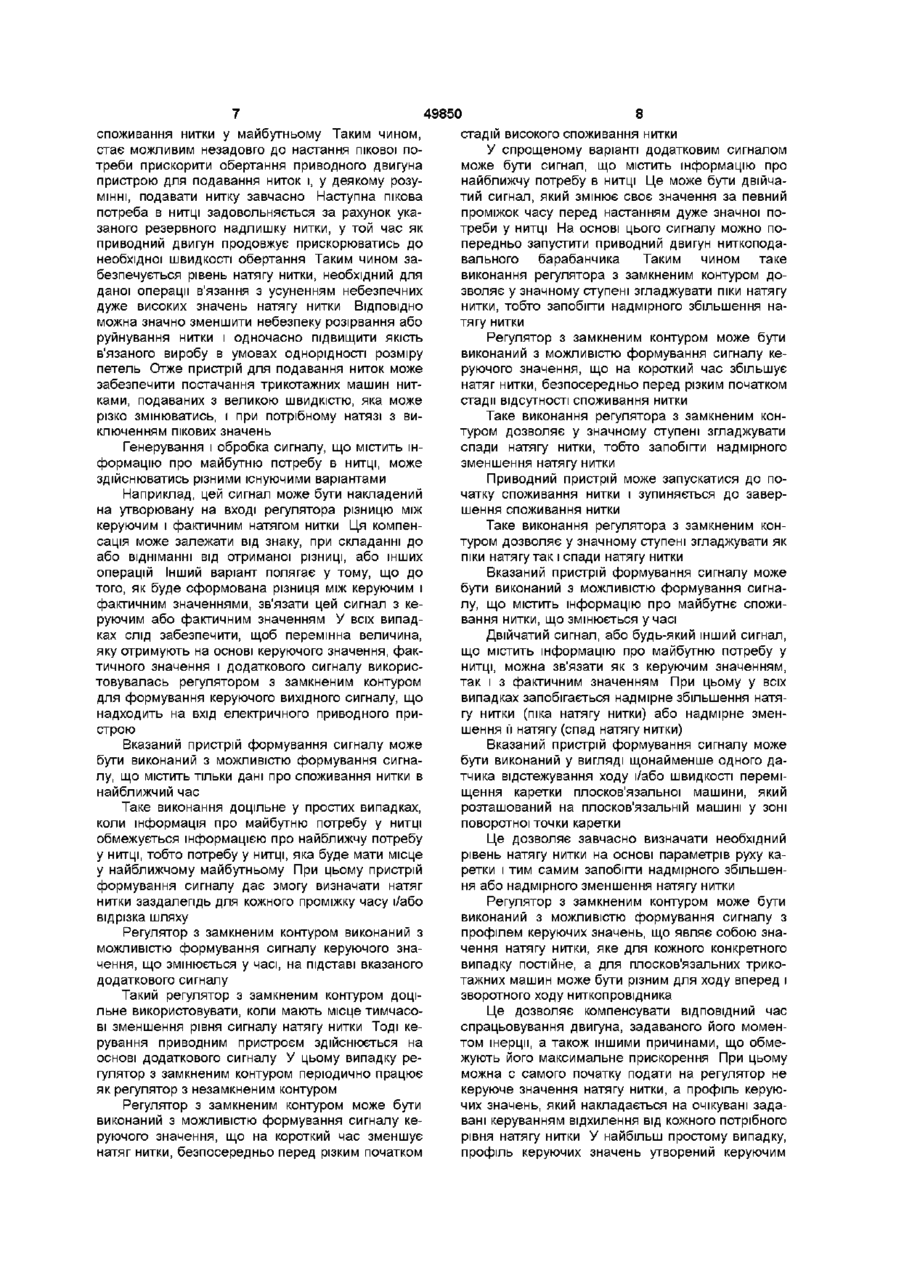
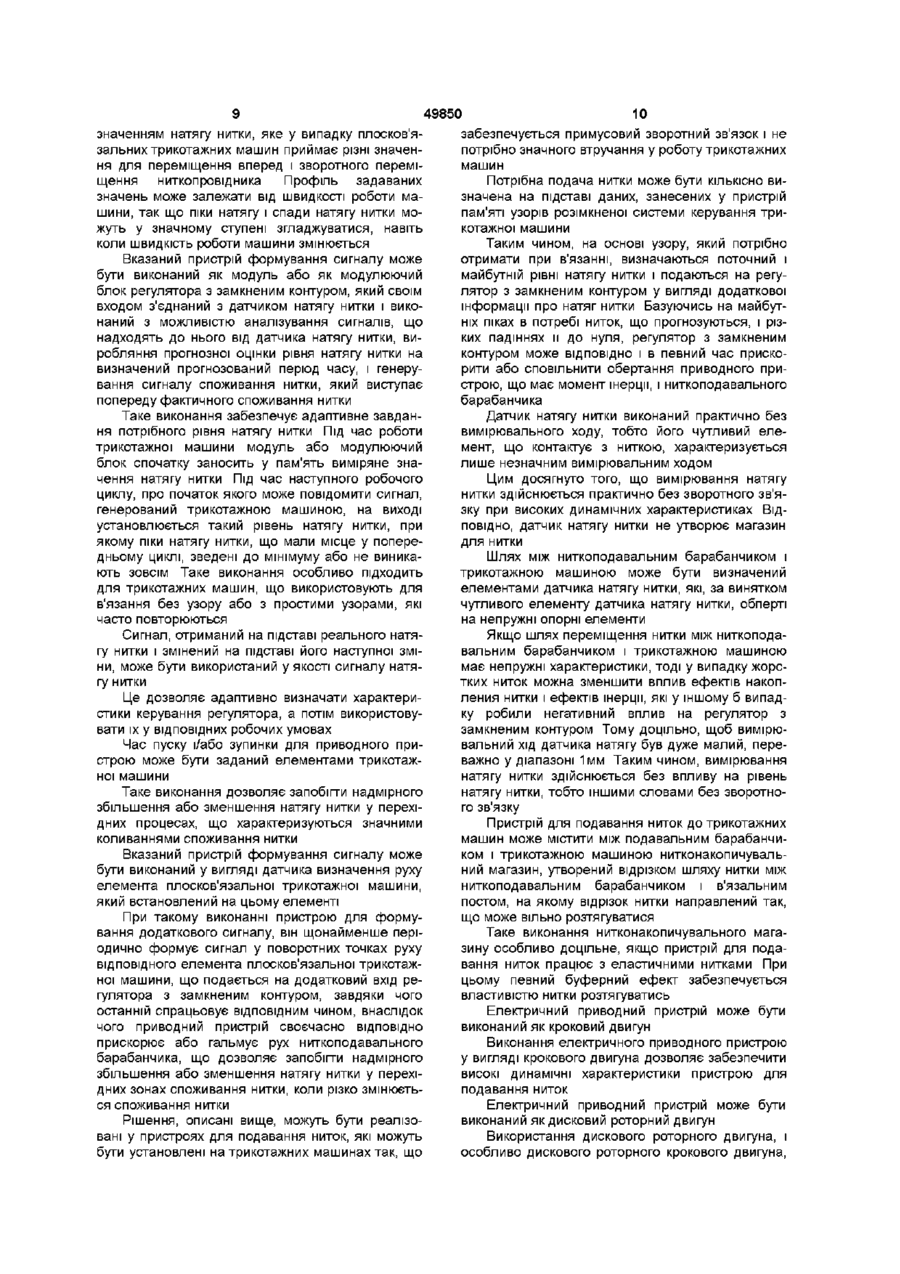
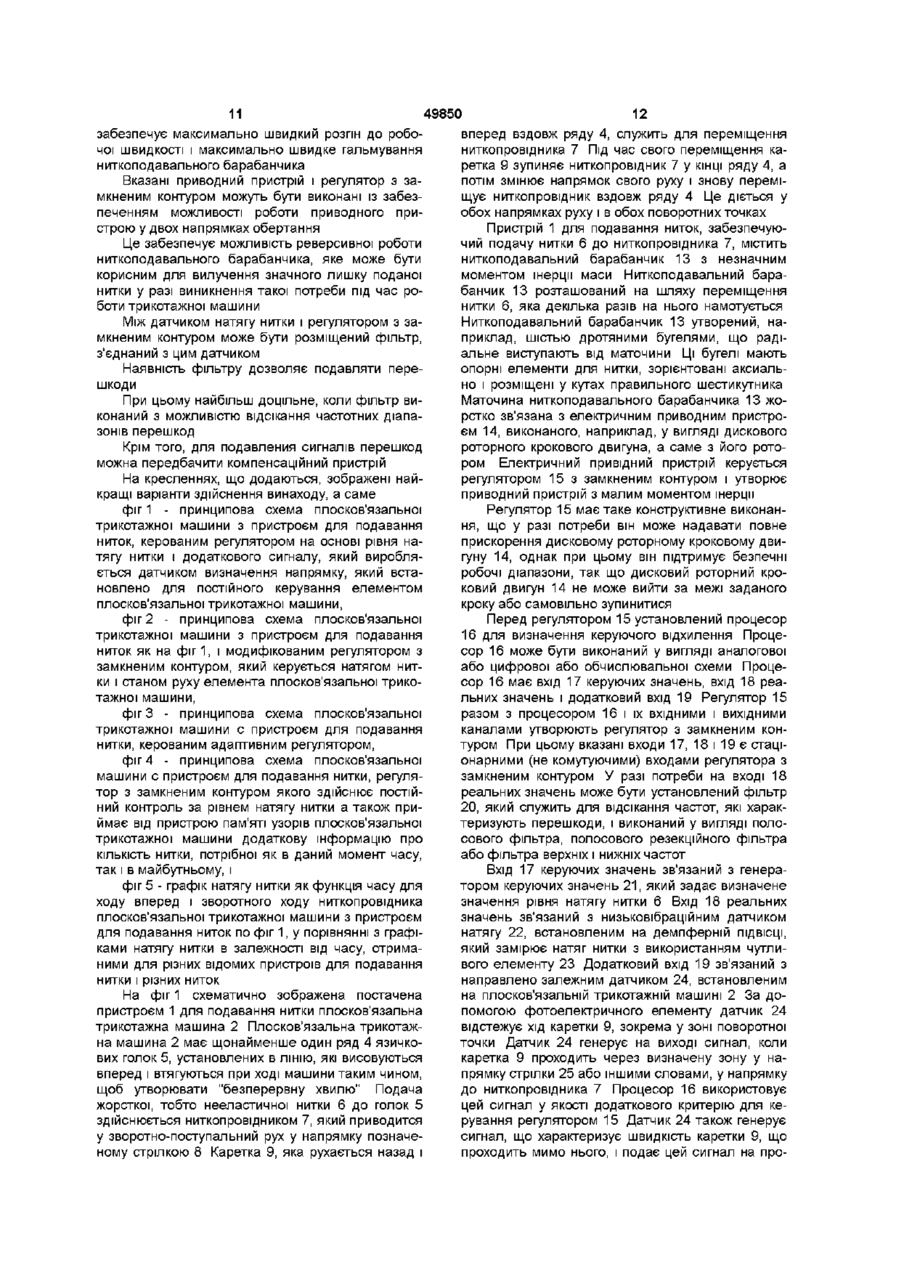
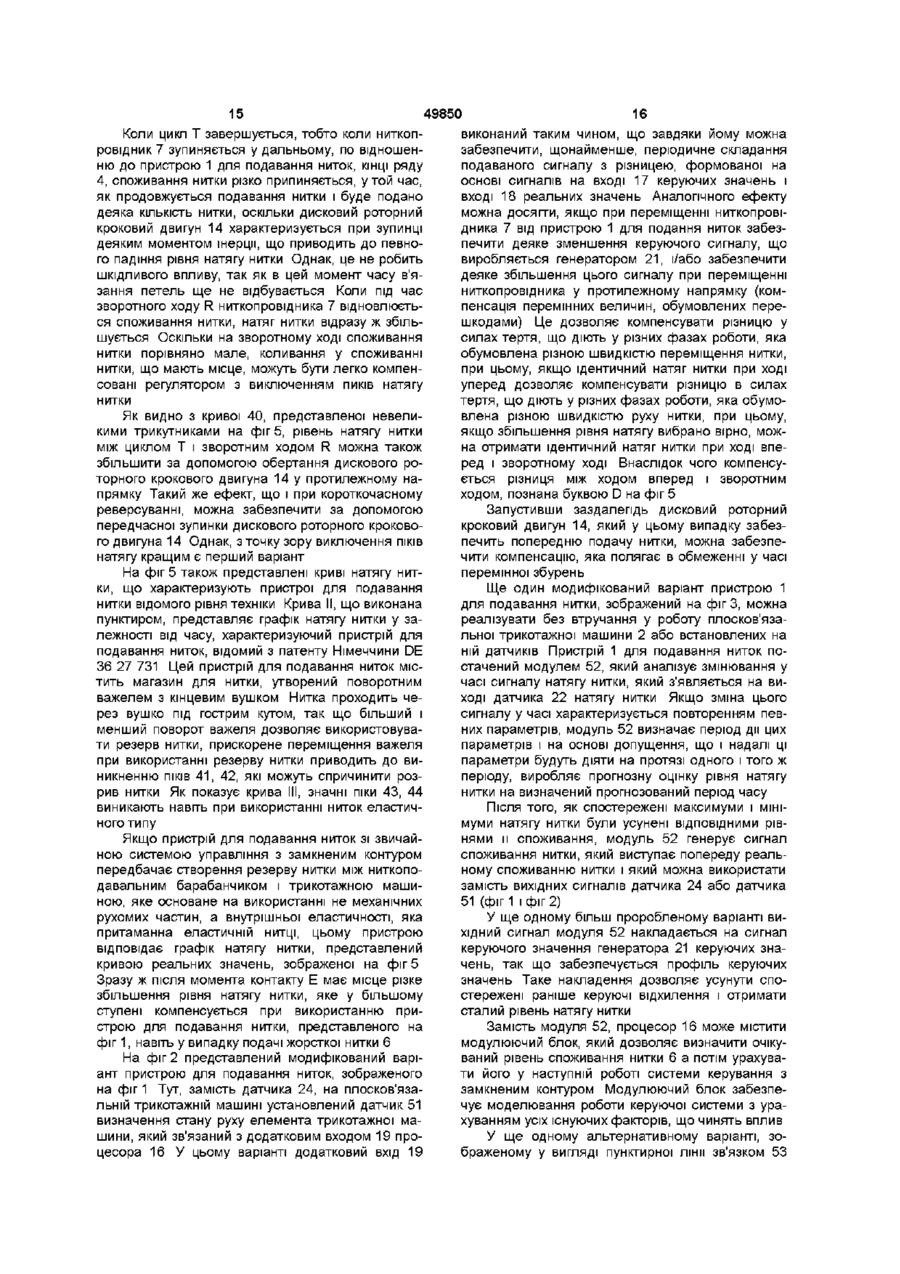
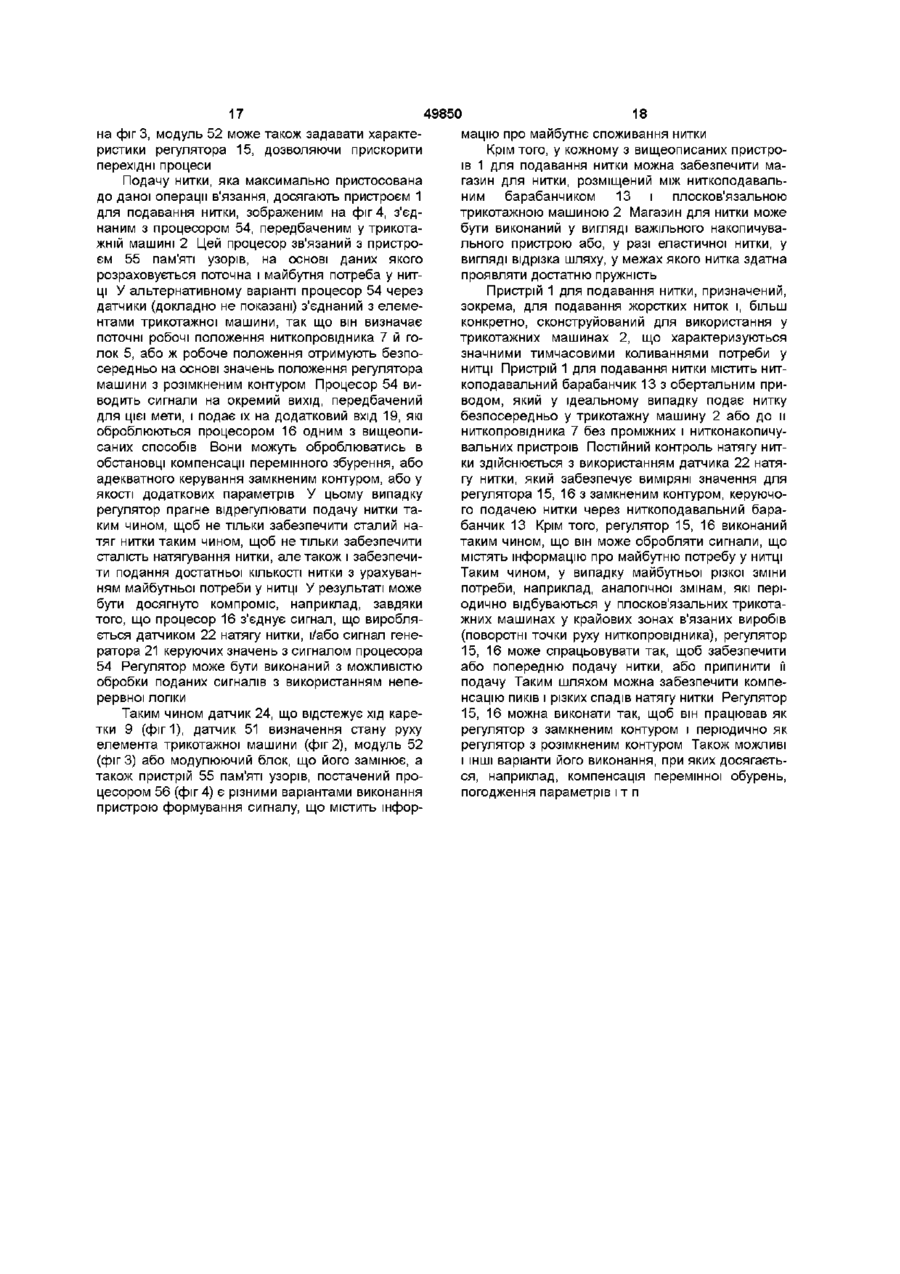
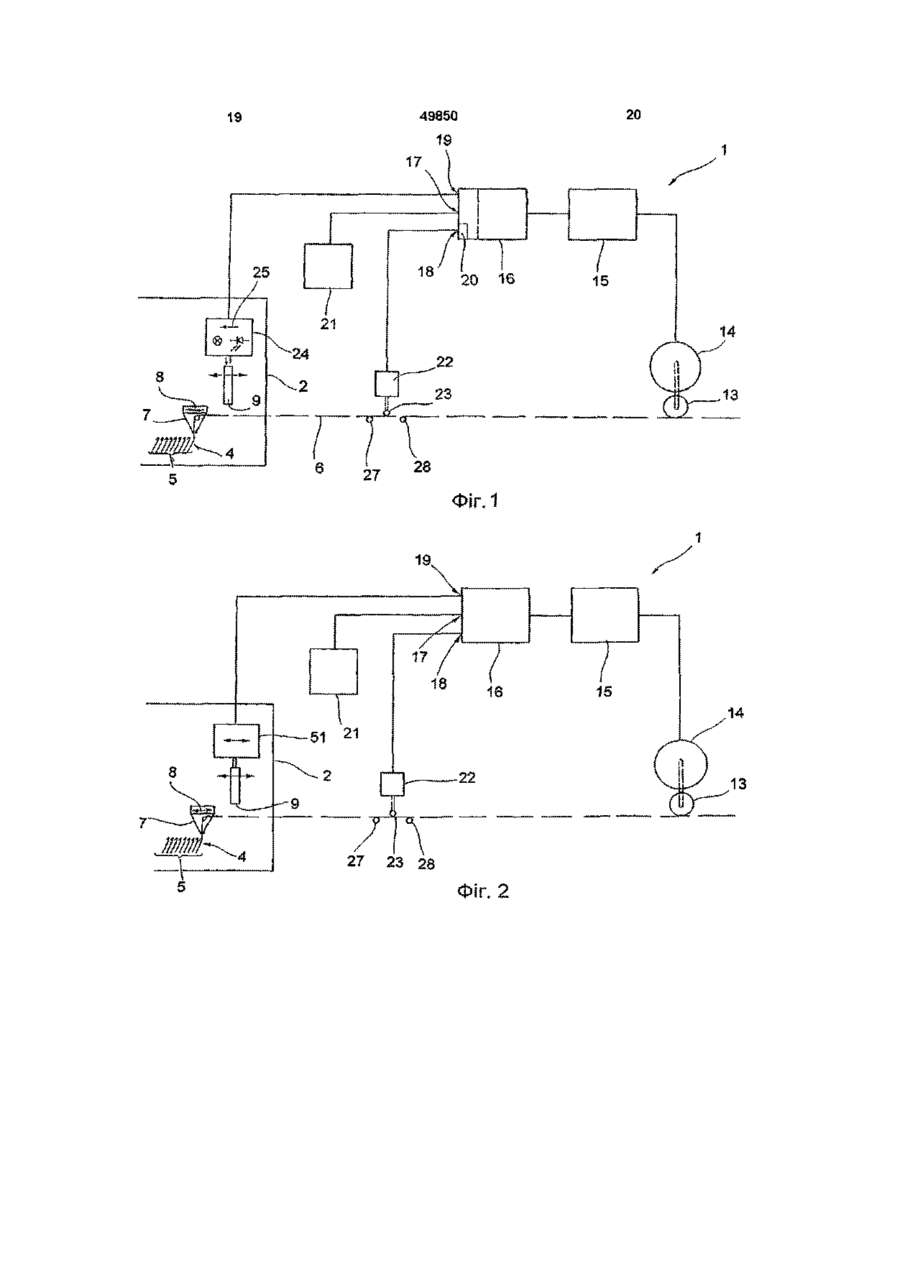
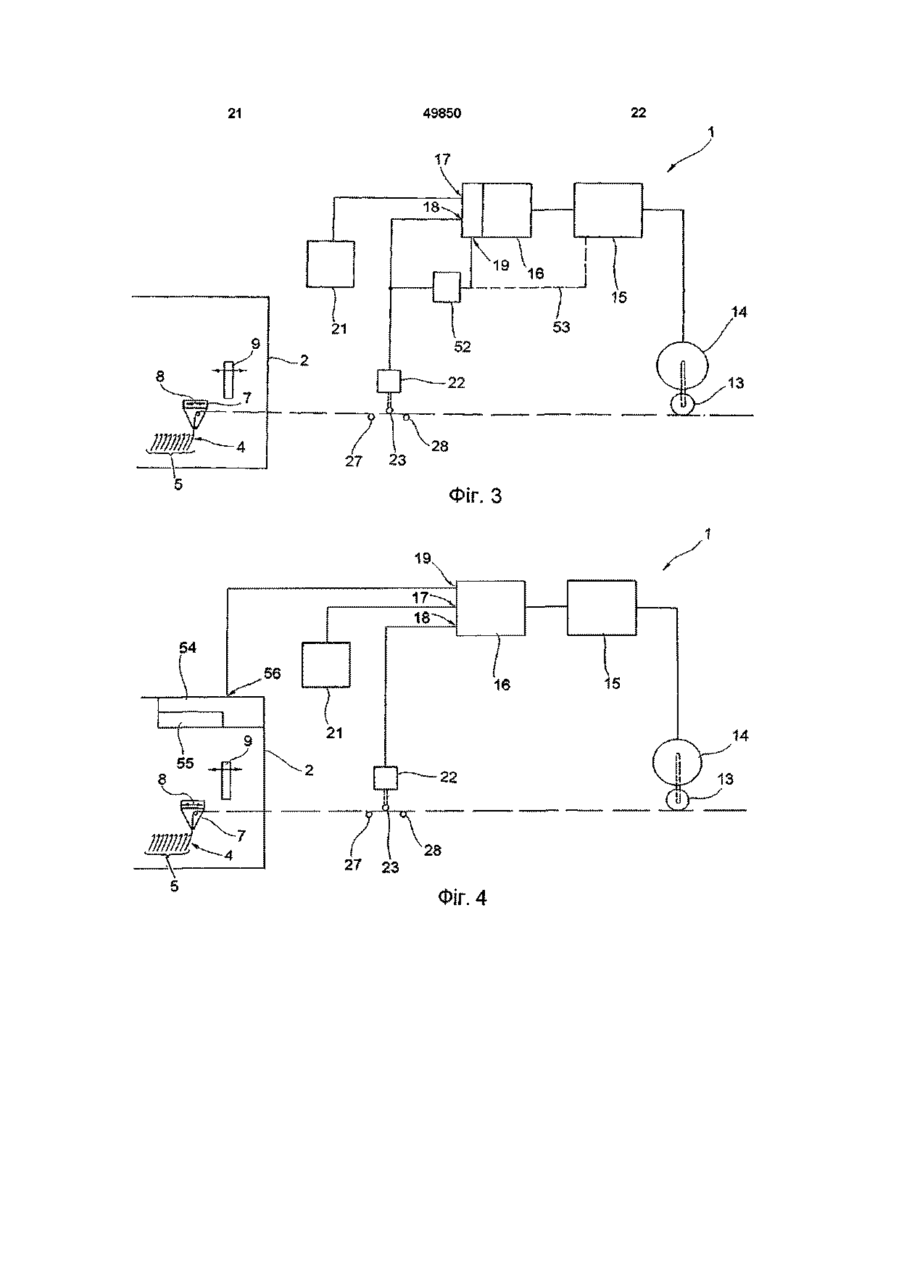
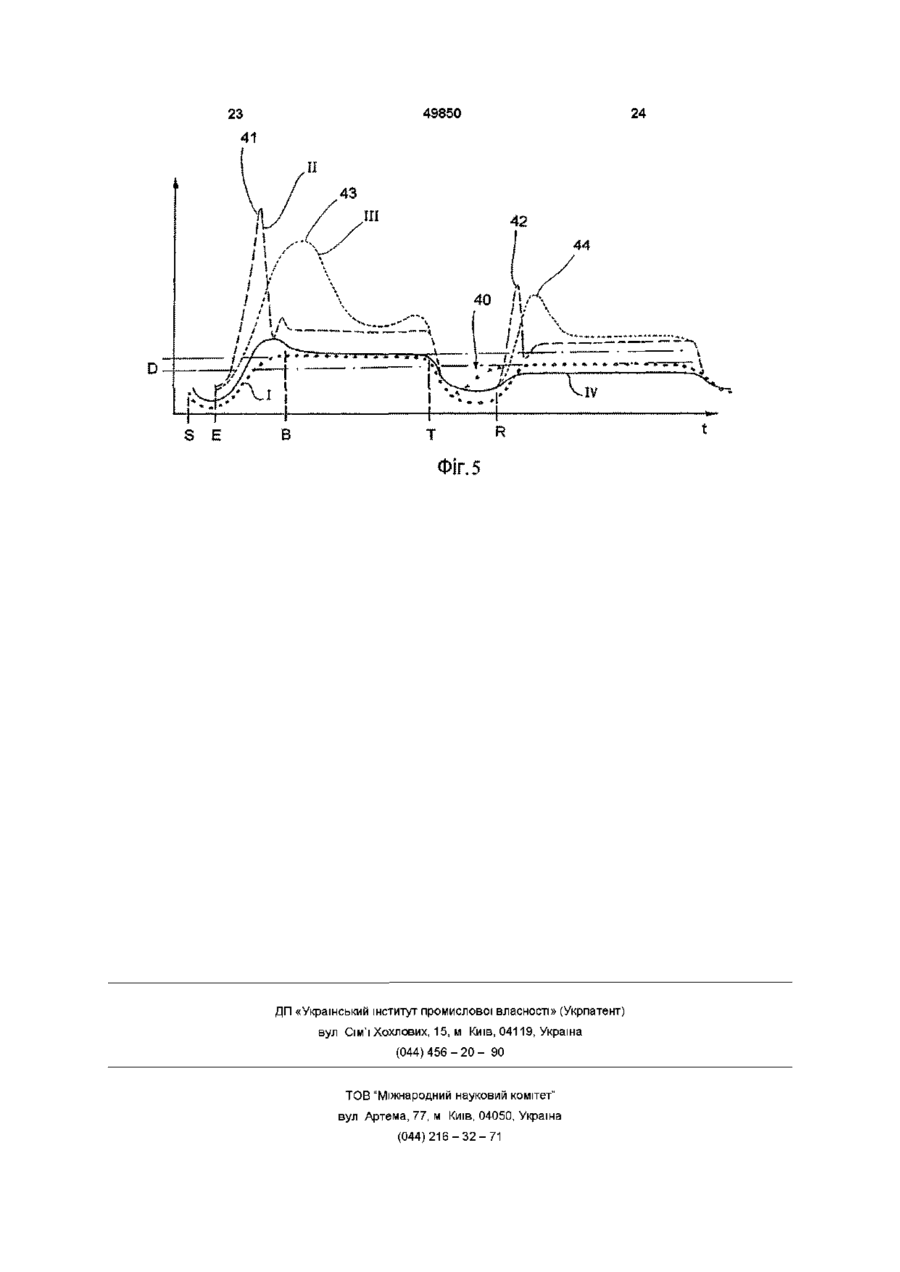
1 Пристрій для подавання ниток до трикотажних машин, що характеризуються різкими змінами споживання нитки у часі, зокрема до плосков'язальних трикотажних машин, що містить ниткоподавальний барабанчик, розміщений на шляху переміщення нитки таким чином, що нитка може на нього намотуватися, і що служить для подавання нитки визначеним чином, електричний привідний пристрій, жорстко з'єданий з ниткоподавальним барабанчиком, датчик натягу нитки, за допомогою якого генерують сигнал, що характеризує натяг нитки, регулятор з замкненим контуром, який одним із своїх стаціонарних входів з'єднаний з датчиком визначення натягу нитки і за допомогою якого керують вказаним електричним привідним пристроєм на основі сигналу натягу нитки (фактичного сигналу), який відрізняється тим, що він додатково включає пристрій формування сигналу, що містить інформацію про майбутнє споживання нитки, а регулятор з замкненим контуром містить додатковий стаціонарний вхід, який з'єднаний з виходом вказаного пристрою формування сигналу, при цьому регулятор з замкненим контуром виконаний з можливістю оброблення додатково до сигналу натягу нитки і/або замість нього щонайменше одного додаткового сигналу, що містить інформацію про майбутнє споживання нитки 2 Пристрій для подавання нитки за п 1, який відрізняється тим, що вказаний пристрій формування сигналу виконаний з можливістю формування сигналу, що містить тільки дані про споживання нитки в найближчий час 3 Пристрій для подавання нитки за п 1, який відрізняється тим, що регулятор з замкненим контуром виконаний з можливістю формування сигналу керуючого значення, що змінюється у часі, на підставі вказаного додаткового сигналу 4 Пристрій для подавання нитки за п 3, який відрізняється тим, що регулятор з замкненим контуром виконаний з можливістю формування сигналу керуючого значення, що на короткий час зменшує натяг нитки, безпосередньо перед різким початком стадій високого споживання нитки 5 Пристрій для подавання нитки за п 3, який відрізняється тим, що регулятор з замкненим контуром виконаний з можливістю формування сигналу керуючого значення, що на короткий час збільшує натяг нитки, безпосередньо перед різким початком стадії відсутності споживання нитки 6 Пристрій для подавання нитки за п 1, який відрізняється тим, що привідний пристрій запускають до початку споживання нитки і зупиняють до завершення споживання нитки 7 Пристрій для подавання нитки за п 1, який відрізняється тим, що вказаний пристрій формування сигналу виконаний з можливістю формування сигналу, що містить інформацію про майбутнє споживання нитки, що змінюється у часі 8 Пристрій для подавання нитки за п 7, який відрізняється тим, що вказаний пристрій формування сигналу виконаний у вигляді щонайменше одного датчика відстежування ходу і/або швидкості переміщення каретки плосков'язальної машини, який розташований на плосков'язальній машині у зоні поворотної точки каретки 9 Пристрій для подавання нитки за п 1, який відрізняється тим, що регулятор з замкненим контуром виконаний з можливістю формування сигналу з профілем керуючих значень, що являє собою значення натягу нитки, яке для кожного конкретного випадку постійне, а для плосков'язальних трикотажних машин є різним для ходу вперед і зворотного ходу ниткопровідника 10 Пристрій для подавання нитки за п 1, який відрізняється тим, що вказаний пристрій формування сигналу виконаний як модуль або як модулюючий блок регулятора з замкненим контуром, який своїм входом з'єднаний з датчиком натягу нитки і виконаний з можливістю аналізування сигналів, що надходять до нього від датчика натя О о ю 00 49850 гу нитки, виробляння прогнозної оцінки рівня натягу нитки на визначений прогнозований період часу, і генерування сигналу споживання нитки, який виступає попереду фактичного споживання нитки 11 Пристрій для подавання нитки за п 1, який відрізняється тим, що сигнал, отриманий на підставі реального натягу нитки і змінений на підставі його наступної зміни, використовують як сигнал натягу нитки 12 Пристрій для подавання нитки за п 1, який відрізняється тим, що час пуску і/або зупинки для привідного пристрою заданий рухомими елементами трикотажної машини 13 Пристрій для подавання нитки за п 1, який відрізняється тим, що вказаний пристрій формування сигналу виконаний у вигляді датчика визначення руху елемента плосков'язальної трикотажної машини, який встановлений на цьому елементі 14 Пристрій для подавання нитки за п 1, який відрізняється тим, що потрібну подачу нитки КІЛЬКІСНО визначають на підставі даних, занесених у пристрій пам'яті узорів розімкненої системи керування трикотажної машини 15 Пристрій для подавання нитки за п 1, який відрізняється тим, що датчик натягу нитки виконаний практично без вимірювального ходу, тобто його чутливий елемент, що контактує з ниткою, має незначний вимірювальний хід 16 Пристрій для подавання нитки за п 15, який відрізняється тим, що шлях між ниткоподавальним барабанчиком і трикотажною машиною визначений елементами датчика натягу нитки, які, за винятком чутливого елементу датчика натягу нитки, обперті на непружні опорні елементи 17 Пристрій для подавання нитки за п 1, який відрізняється тим, що між подавальним барабанчиком і трикотажною машиною він містить нитконакопичувальний магазин, утворений відрізком шляху нитки між ниткоподавальним барабанчиком і в'язальним постом, на якому відрізок нитки направлений так, що вільно розтягнутий 18 Пристрій для подавання нитки за п 1, який відрізняється тим, що привідним пристроєм є кроковий двигун 19 Пристрій для подавання нитки за п 1, який відрізняється тим, що електричним привідним пристроєм є дисковий роторний двигун 20 Пристрій для подавання нитки за п 1, який відрізняється тим, що електричний привідний пристрій і регулятор з замкненим контуром виконані з забезпеченням можливості роботи привідного пристрою у двох напрямках обертання 21 Пристрій для подавання нитки за п 10, який відрізняється тим, що між датчиком натягу нитки і регулятором з замкненим контуром розміщений фільтр, з'єднаний з цим датчиком 22 Пристрій для подавання нитки за п 21, який відрізняється тим, що фільтр виконаний у вигляді ВІДСІЧНОГО фільтра частотних діапазонів перешкод Даний винахід відноситься до текстильної промисловості, а саме до електронно керованого пристрою для подавання ниток до трикотажних машин, що характеризуються різкими змінами споживання нитки у часі, зокрема до плосков'язальних трикотажних машин, і може бути використаний для подавання еластичних і нееластичних (жорстких) ниток, стрічок, паєм і т п Пристрої для подавання ниток у трикотажних машинах призначені для своєчасного забезпечення ВІДПОВІДНИХ в'язальних постів ниткою з необхід крокового двигуна Цей ниткоподавальний барабанчик переміщає нитку, витягнуту з бобіни, до ВІДПОВІДНОГО в'язального посту через гальмо для нитки Подана ниткоподавальним барабанчиком нитка проходить через кінцеве вушко важеля, що спирається з можливістю повороту на свій другий кінець Вушко забезпечує точку повороту, у якій нитка під гострим кутом змінює напрямок свого руху Сталість натягу забезпечується завдяки того, що на поворотний важіль діє постійний крутний момент, розвинений електродвигуном постійного струму Поворотний важіль також з'єднаний з датчиком положення, який визначає його положення і забезпечує відповідне перерегулювання крокового двигуна Таким чином, поворотний важіль, разом з датчиком служить для вимірювання існуючої подачі нитки ним натягом і у потрібній КІЛЬКОСТІ ДЛЯ КОЖНОГО випадку Постійний рівень натягу є головним визначальним фактором для забезпечення однорідності одержуваних в'язаних виробів Коливання у ступені натягу поданої нитки, особливо коли вони повторюються при переході від одного ряду петель до іншого можуть привести до значного погіршення якості одержуваних в'язаних виробів у порівнянні з шириною петель посередині Особливо у випадку жорстких ниток, із-за їх нездатності розтягуватися, натяг нитки залежить від КІЛЬКОСТІ поданої нитки, яка повинна як можливо більше відповідати її споживанню в кожний окремий теперішній момент часу Для випадків, що характеризуються коливаннями споживання нитки на протязі часу, був розроблений пристрій для подавання ниток, відомий з патенту Німеччини DE 36 27 731 С1 Він містить ниткоподавальний барабанчик із приводом від Регулятор з замкненим контуром зрівнює положення поворотного важеля з керуючим значенням і розганяє або гальмує двигун, якщо керуюче значення не досягнуто або перевищено 3 метою компенсації несподіваної зміни у споживанні нитки, яку двигун нездатний відстежувати миттєво із-за свого моменту інерції, поворотний важіль утворює магазин для нитки, який тимчасово може розмістити певний відрізок нитки При різкій ЗМІНІ споживання нитки поворотний важіль повинен прискорювати своє переміщення Момент інерції поворотного важеля здійснює вплив на натяг нитки і погіршує внаслідок цього стабільність 49850 З патенту Німеччини DE 38 20 618 С2 відомий пристрій для подавання петлевих та інших ниток фасонної крутки Він постачений двома ниткоподавальними барабанчиками з обертальним приводом, які обертаються у протилежних напрямках На ці ниткоподавальні барабанчики подавана нитка намотана декілька разів, утворюючі цифру "ВІСІМ" Важіль, на одному КІНЦІ ЯКОГО виконано вушко і на який діє крутний момент у заданому напрямку обертання, служить у якості магазина для тимчасового зберігання нитки, періодично не спожитої в'язальними постами Нитка під гострим кутом проходить його кінцеве вушко і тимчасово розміщується на прогоничах або стояках, розміщених по колу навколо важеля На нитку діє тертя у зоні прогоничей і стояків, які утворюють тимчасовий магазин для розміщення нитки, і вушка важеля, через яке нитка проходить під гострим кутом З опису патенту Німеччини DE 42 06 607 А1 відомий пристрій для подавання ниток, що забезпечує одночасну подачу двох ниток до трикотажної машини Тут ниткоподавальний барабанчик приводиться у обертання дисковим роторним двигуном Щонайменше, одна нитка, коли відходить від ниткоподавального барабанчика, проходить через поздовжній отвір спіральної пружини, навитої у вигляді конуса або воронки Передбачений постійний магніт з датчиком Холла, установлений на підшипнику, який утримує з можливістю повороту спіральну пружину з одного и кінця, що дозволяє вимірювати відхилення спіральної пружини На основі цих відхилень проводиться перерегулювання дискового роторного двигуна, так що при сталому режимі задається керуюча довжина спіральної пружини При такому положенні нитка відхиляється у боковому напрямку і рухається вздовж внутрішньої стінки пружини, проходячи через отвір у ній Спіральна пружина служить у якості пружного демпферного пристрою, що забезпечує тимчасове розміщення поданої нитки Подана нитка, зважаючи на наявність моменту інерції у дискового роторного двигуна, розміщується у тимчасовому магазині, що приводить до зміни натягу Нарешті, у патенті США 3858416, опублікованому 07 01 1975, М кп D04b 15/48 описаний пристрій для подавання ниток, який використовують у трикотажних машинах, що характеризуються по суті сталим споживанням нитки, і який розрахований на подавання жорстких ниток Даний пристрій вибраний як найближчий аналог заявленого винаходу Відомий пристрій для подавання ниток містить електричний двигун з регулюванням КІЛЬКОСТІ обертів за допомогою прикладеної напруги, який через ВІДПОВІДНИЙ ниткоподавальний барабанчик змотує нитку з бобіни і подає и до ВІДПОВІДНОГО в'язального посту через датчик натягу Також присутній перетворювач задаваних значень, який з'єднаний з входом задаваних значень регулятора з замкненим контуром через реверсивний перемикач і через регулюючі пристрої з декількома варіантами спрацьовування Через указаний реверсивний перемикач регулятор на своєму вході реальних значень отримує сигнал, що характери зує натяг нитки, і ВІДПОВІДНО перенастроює електричний двигун Крім того, на електричному двигуні і на трикотажній машині установлені датчики КІЛЬКОСТІ обертів Задаючи ВІДПОВІДНІ різні положення перемикача полярності, датчики можуть з'єднуватися з входами керуючих і реальних значень регулятора Реверсивний перемикач забезпечує перемикання з одного робочого режиму з таким регулюванням натягу нитки, при якому натяг нитки постійний, на другий робочий режим з заданою величиною натягу нитки Кожний в'язальний пост круглов'язальної трикотажної машини спроваджений ВІДПОВІДНИМ пристроєм для подавання нитки, з тим щоб КІЛЬКІСТЬ нитки, яку треба подати, відповідала споживанню нитки в'язальним постом Швидкість переміщення нитки ВІДПОВІДНО невелика Тут не передбачено ніяких пристроїв для тимчасового розміщення надлишку нитки, поданого ізза шерційності роботи або робочих характеристик електричного двигуна, або на випадок різкого зростання потреби у змотуваній нитці Тому різке зростання потреби у змотуваній нитці обумовлює, зважаючи на характеристики спрацьовування регулятора і зв'язаного з ним двигуна, піки у натязі нитки, які при граничних значеннях можуть привести до розриву нитки З урахуванням вищесказаного, задачею даного винаходу є створення пристрою для подавання ниток, за допомогою якого можна забезпечити постачання трикотажних машин нитками, подаваних з великою швидкістю, яка може різко змінюватись, і при потрібному натязі з виключенням пікових значень Ця задача досягається за допомогою пристрою для подавання ниток до трикотажних машин, що характеризуються різкими змінами споживання нитки у часі, зокрема до плосков'язальних трикотажних машин, що містить ниткоподавальний барабанчик, розміщений на шляху переміщення нитки таким чином, що нитка може на нього намотуватися, і що служить для подавання нитки визначеним чином, електричний приводний пристрій, жорстко з'єднаний з ниткоподавальним барабанчиком, датчик натягу нитки, за допомогою якого можна генерувати сигнал, що характеризує натяг нитки, регулятор з замкненим контуром, який одним із своїх стаціонарних входів з'єднаний з датчиком визначення натягу нитки і за допомогою якого можна керувати вказаним електричним приводним пристроєм на основі сигналу натягу нитки (фактичного сигналу), який згідно з винаходом додатково включає пристрій формування сигналу, що містить інформацію про майбутнє споживання нитки, а регулятор з замкненим контуром містить додатковий стаціонарний вхід, який з'єднаний з виходом вказаного пристрою формування сигналу, при цьому регулятор з замкненим контуром виконаний з можливістю обробляння додатково до сигналу натягу нитки і/або замість нього щонайменше одного додаткового сигналу, що містить інформацію про майбутнє споживання нитки При такому виконанні пристрою подавання ниток до трикотажних машин регулятор з замкненим контуром може обробляти не тільки фактичні значення натягу нитки і задані значення натягу нитки, але також і іншу інформацію, зв'язану з рівнем 49850 споживання нитки у майбутньому Таким чином, стає можливим незадовго до настання пікової потреби прискорити обертання приводного двигуна пристрою для подавання ниток і, у деякому розумінні, подавати нитку завчасно Наступна пікова потреба в нитці задовольняється за рахунок указаного резервного надлишку нитки, у той час як приводний двигун продовжує прискорюватись до необхідної швидкості обертання Таким чином забезпечується рівень натягу нитки, необхідний для даної операції в'язання з усуненням небезпечних дуже високих значень натягу нитки ВІДПОВІДНО можна значно зменшити небезпеку розірвання або руйнування нитки і одночасно підвищити якість в'язаного виробу в умовах однорідності розміру петель Отже пристрій для подавання ниток може забезпечити постачання трикотажних машин нитками, подаваних з великою швидкістю, яка може різко змінюватись, і при потрібному натязі з виключенням пікових значень Генерування і обробка сигналу, що містить інформацію про майбутню потребу в нитці, може здійснюватись різними існуючими варіантами Наприклад, цей сигнал може бути накладений на утворювану на вході регулятора різницю між керуючим і фактичним натягом нитки Ця компенсація може залежати від знаку, при складанні до або відніманні від отриманої різниці, або інших операцій Інший варіант полягає у тому, що до того, як буде сформована різниця між керуючим і фактичним значеннями, зв'язати цей сигнал з керуючим або фактичним значенням У всіх випадках слід забезпечити, щоб перемінна величина, яку отримують на основі керуючого значення, фактичного значення і додаткового сигналу використовувалась регулятором з замкненим контуром для формування керуючого вихідного сигналу, що надходить на вхід електричного приводного пристрою Вказаний пристрій формування сигналу може бути виконаний з можливістю формування сигналу, що містить тільки дані про споживання нитки в найближчий час Таке виконання доцільне у простих випадках, коли інформація про майбутню потребу у нитці обмежується інформацією про найближчу потребу у нитці, тобто потребу у нитці, яка буде мати місце у найближчому майбутньому При цьому пристрій формування сигналу дає змогу визначати натяг нитки заздалегідь для кожного проміжку часу і/або відрізка шляху Регулятор з замкненим контуром виконаний з можливістю формування сигналу керуючого значення, що змінюється у часі, на підставі вказаного додаткового сигналу Такий регулятор з замкненим контуром доцільне використовувати, коли мають місце тимчасові зменшення рівня сигналу натягу нитки Тоді керування приводним пристроєм здійснюється на основі додаткового сигналу У цьому випадку регулятор з замкненим контуром періодично працює як регулятор з незамкненим контуром Регулятор з замкненим контуром може бути виконаний з можливістю формування сигналу керуючого значення, що на короткий час зменшує натяг нитки, безпосередньо перед різким початком 8 стадій високого споживання нитки У спрощеному варіанті додатковим сигналом може бути сигнал, що містить інформацію про найближчу потребу в нитці Це може бути двійчатий сигнал, який змінює своє значення за певний проміжок часу перед настанням дуже значної потреби у нитці На основі цього сигналу можно попередньо запустити приводний двигун ниткоподавального барабанчика Таким чином таке виконання регулятора з замкненим контуром дозволяє у значному ступені згладжувати піки натягу нитки, тобто запобігти надмірного збільшення натягу нитки Регулятор з замкненим контуром може бути виконаний з можливістю формування сигналу керуючого значення, що на короткий час збільшує натяг нитки, безпосередньо перед різким початком стадії відсутності споживання нитки Таке виконання регулятора з замкненим контуром дозволяє у значному ступені згладжувати спади натягу нитки, тобто запобігти надмірного зменшення натягу нитки Приводний пристрій може запускатися до початку споживання нитки і зупиняється до завершення споживання нитки Таке виконання регулятора з замкненим контуром дозволяє у значному ступені згладжувати як піки натягу так і спади натягу нитки Вказаний пристрій формування сигналу може бути виконаний з можливістю формування сигналу, що містить інформацію про майбутнє споживання нитки, що змінюється у часі Двійчатий сигнал, або будь-який інший сигнал, що містить інформацію про майбутню потребу у нитці, можна зв'язати як з керуючим значенням, так і з фактичним значенням При цьому у всіх випадках запобігається надмірне збільшення натягу нитки (піка натягу нитки) або надмірне зменшення її натягу (спад натягу нитки) Вказаний пристрій формування сигналу може бути виконаний у вигляді щонайменше одного датчика відстежування ходу і/або швидкості переміщення каретки плосков'язальної машини, який розташований на плосков'язальній машині у зоні поворотної точки каретки Це дозволяє завчасно визначати необхідний рівень натягу нитки на основі параметрів руху каретки і тим самим запобігти надмірного збільшення або надмірного зменшення натягу нитки Регулятор з замкненим контуром може бути виконаний з можливістю формування сигналу з профілем керуючих значень, що являє собою значення натягу нитки, яке для кожного конкретного випадку постійне, а для плосков'язальних трикотажних машин може бути різним для ходу вперед і зворотного ходу ниткопровідника Це дозволяє компенсувати ВІДПОВІДНИЙ час спрацьовування двигуна, задаваного його моментом інерції, а також іншими причинами, що обмежують його максимальне прискорення При цьому можна с самого початку подати на регулятор не керуюче значення натягу нитки, а профіль керуючих значень, який накладається на очікувані задавані керуванням відхилення від кожного потрібного рівня натягу нитки У найбільш простому випадку, профіль керуючих значень утворений керуючим 49850 значенням натягу нитки, яке у випадку плосковязальних трикотажних машин приймає різні значення для переміщення вперед і зворотного переміщення ниткопровідника Профіль задаваних значень може залежати від швидкості роботи машини, так що піки натягу і спади натягу нитки можуть у значному ступені згладжуватися, навіть коли швидкість роботи машини змінюється Вказаний пристрій формування сигналу може бути виконаний як модуль або як модулюючий блок регулятора з замкненим контуром, який своїм входом з'єднаний з датчиком натягу нитки і виконаний з можливістю аналізування сигналів, що надходять до нього від датчика натягу нитки, виробляння прогнозної оцінки рівня натягу нитки на визначений прогнозований період часу, і генерування сигналу споживання нитки, який виступає попереду фактичного споживання нитки Таке виконання забезпечує адаптивне завдання потрібного рівня натягу нитки Під час роботи трикотажної машини модуль або модулюючий блок спочатку заносить у пам'ять виміряне значення натягу нитки Під час наступного робочого циклу, про початок якого може повідомити сигнал, генерований трикотажною машиною, на виході установлюється такий рівень натягу нитки, при якому піки натягу нитки, що мали місце у попередньому циклі, зведені до мінімуму або не виникають зовсім Таке виконання особливо підходить для трикотажних машин, що використовують для в'язання без узору або з простими узорами, які часто повторюються Сигнал, отриманий на підставі реального натягу нитки і змінений на підставі його наступної зміни, може бути використаний у якості сигналу натягу нитки Це дозволяє адаптивно визначати характеристики керування регулятора, а потім використовувати їх у ВІДПОВІДНИХ робочих умовах Час пуску і/або зупинки для приводного пристрою може бути заданий елементами трикотажної машини Таке виконання дозволяє запобігти надмірного збільшення або зменшення натягу нитки у перехідних процесах, що характеризуються значними коливаннями споживання нитки Вказаний пристрій формування сигналу може бути виконаний у вигляді датчика визначення руху елемента плосков'язальної трикотажної машини, який встановлений на цьому елементі При такому виконанні пристрою для формування додаткового сигналу, він щонайменше періодично формує сигнал у поворотних точках руху ВІДПОВІДНОГО елемента плосков'язальної трикотажної машини, що подається на додатковий вхід регулятора з замкненим контуром, завдяки чого останній спрацьовує ВІДПОВІДНИМ ЧИНОМ, внаслідок чого приводний пристрій своєчасно ВІДПОВІДНО прискорює або гальмує рух ниткоподзвального барабанчика, що дозволяє запобігти надмірного збільшення або зменшення натягу нитки у перехідних зонах споживання нитки, коли різко змінюється споживання нитки Рішення, описані вище, можуть бути реалізовані у пристроях для подавання ниток, які можуть бути установлені на трикотажних машинах так, що 10 забезпечується примусовий зворотний зв'язок і не потрібно значного втручання у роботу трикотажних машин Потрібна подача нитки може бути КІЛЬКІСНО визначена на підставі даних, занесених у пристрій пам'яті узорів розімкненої системи керування трикотажної машини Таким чином, на основі узору, який потрібно отримати при в'язанні, визначаються поточний і майбутній рівні натягу нитки і подаються на регулятор з замкненим контуром у вигляді додаткової інформації про натяг нитки Базуючись на майбутніх піках в потребі ниток, що прогнозуються, і різких падіннях и до нуля, регулятор з замкненим контуром може ВІДПОВІДНО і в певний час прискорити або сповільнити обертання приводного пристрою, що має момент інерції, і ниткоподавального барабанчика Датчик натягу нитки виконаний практично без вимірювального ходу, тобто його чутливий елемент, що контактує з ниткою, характеризується лише незначним вимірювальним ходом Цим досягнуто того, що вимірювання натягу нитки здійснюється практично без зворотного зв'язку при високих динамічних характеристиках ВІДПОВІДНО, датчик натягу нитки не утворює магазин для нитки Шлях між ниткоподавальним барабанчиком і трикотажною машиною може бути визначений елементами датчика натягу нитки, які, за винятком чутливого елементу датчика натягу нитки, обперті на непружні опорні елементи Якщо шлях переміщення нитки між ниткоподавальним барабанчиком і трикотажною машиною має непружні характеристики, тоді у випадку жорстких ниток можна зменшити вплив ефектів накопления нитки і ефектів інерції, які у іншому б випадку робили негативний вплив на регулятор з замкненим контуром Тому доцільно, щоб вимірювальний хід датчика натягу був дуже малий, переважно у діапазоні 1мм Таким чином, вимірювання натягу нитки здійснюється без впливу на рівень натягу нитки, тобто іншими словами без зворотного зв'язку Пристрій для подавання ниток до трикотажних машин може містити між подавальним барабанчиком і трикотажною машиною нитконакопичувальний магазин, утворений відрізком шляху нитки між ниткоподавальним барабанчиком і в'язальним постом, на якому відрізок нитки направлений так, що може вільно розтягуватися Таке виконання нитконакопичувального магазину особливо доцільне, якщо пристрій для подавання ниток працює з еластичними нитками При цьому певний буферний ефект забезпечується властивістю нитки розтягуватись Електричний приводний пристрій може бути виконаний як кроковий двигун Виконання електричного приводного пристрою у вигляді крокового двигуна дозволяє забезпечити високі динамічні характеристики пристрою для подавання ниток Електричний приводний пристрій може бути виконаний як дисковий роторний двигун Використання дискового роторного двигуна, і особливо дискового роторного крокового двигуна, 12 11 49850 забезпечує максимально швидкий розгін до робовперед вздовж ряду 4, служить для переміщення чої швидкості і максимально швидке гальмування ниткопровідника 7 Під час свого переміщення каниткоподавального барабанчика ретка 9 зупиняє ниткопровідник 7 у КІНЦІ ряду 4, а потім змінює напрямок свого руху і знову переміВказані приводний пристрій і регулятор з защує ниткопровідник вздовж ряду 4 Це діється у мкненим контуром можуть бути виконані із забезобох напрямках руху і в обох поворотних точках печенням можливості роботи приводного пристрою у двох напрямках обертання Пристрій 1 для подавання ниток, забезпечуюЦе забезпечує можливість реверсивної роботи чий подачу нитки 6 до ниткопровідника 7, містить ниткоподавального барабанчика, яке може бути ниткоподавальний барабанчик 13 з незначним корисним для вилучення значного лишку поданої моментом інерції маси Ниткоподавальний баранитки у разі виникнення такої потреби під час робанчик 13 розташований на шляху переміщення боти трикотажної машини нитки 6, яка декілька разів на нього намотується Ниткоподавальний барабанчик 13 утворений, наМіж датчиком натягу нитки і регулятором з заприклад, шістью дротяними бугелями, що радімкненим контуром може бути розміщений фільтр, альне виступають від маточини Ці бугелі мають з'єднаний з цим датчиком опорні елементи для нитки, зорієнтовані аксиальНаявність фільтру дозволяє подавляти перено і розміщені у кутах правильного шестикутника шкоди Маточина ниткоподавального барабанчика 13 жоПри цьому найбільш доцільне, коли фільтр вирстко зв'язана з електричним приводним пристроконаний з можливістю відсікання частотних діапаєм 14, виконаного, наприклад, у вигляді дискового зонів перешкод роторного крокового двигуна, а саме з його ротоКрім того, для подавления сигналів перешкод ром Електричний привідний пристрій керується можна передбачити компенсаційний пристрій регулятором 15 з замкненим контуром і утворює На кресленнях, що додаються, зображені найприводний пристрій з малим моментом інерції кращі варіанти здійснення винаходу, а саме фіг 1 - принципова схема плосков'язальної Регулятор 15 має таке конструктивне виконантрикотажної машини з пристроєм для подавання ня, що у разі потреби він може надавати повне ниток, керованим регулятором на основі рівня наприскорення дисковому роторному кроковому двитягу нитки і додаткового сигналу, який вироблягуну 14, однак при цьому він підтримує безпечні ється датчиком визначення напрямку, який встаробочі діапазони, так що дисковий роторний кроновлено для постійного керування елементом ковий двигун 14 не може вийти за межі заданого плосков'язальної трикотажної машини, кроку або самовільно зупинитися фіг 2 - принципова схема плосков'язальної Перед регулятором 15 установлений процесор трикотажної машини з пристроєм для подавання 16 для визначення керуючого відхилення Процениток як на фіг 1, і модифікованим регулятором з сор 16 може бути виконаний у вигляді аналогової замкненим контуром, який керується натягом нитабо цифрової або обчислювальної схеми Процеки і станом руху елемента плосков'язальної трикосор 16 має вхід 17 керуючих значень, вхід 18 реатажної машини, льних значень і додатковий вхід 19 Регулятор 15 разом з процесором 16 і їх вхідними і вихідними фіг 3 - принципова схема плосков'язальної каналами утворюють регулятор з замкненим контрикотажної машини с пристроєм для подавання туром При цьому вказані входи 17, 18 і 19 є стацінитки, керованим адаптивним регулятором, онарними (не комутуючими) входами регулятора з фіг 4 - принципова схема плосков'язальної замкненим контуром У разі потреби на вході 18 машини с пристроєм для подавання нитки, регуляреальних значень може бути установлений фільтр тор з замкненим контуром якого здійснює постій20, який служить для відсікання частот, які харакний контроль за рівнем натягу нитки а також притеризують перешкоди, і виконаний у вигляді полоймає від пристрою пам'яті узорів плосков'язальної сового фільтра, полосового резекційного фільтра трикотажної машини додаткову інформацію про або фільтра верхніх і нижніх частот КІЛЬКІСТЬ нитки, потрібної як в даний момент часу, так і в майбутньому, і Вхід 17 керуючих значень зв'язаний з генератором керуючих значень 21, який задає визначене фіг 5 - графік натягу нитки як функція часу для значення рівня натягу нитки 6 Вхід 18 реальних ходу вперед і зворотного ходу ниткопровідника значень зв'язаний з низьковібраційним датчиком плосков'язальної трикотажної машини з пристроєм натягу 22, встановленим на демпферній ПІДВІСЦІ, для подавання ниток по фіг 1, у порівнянні з графіякий замірює натяг нитки з використанням чутликами натягу нитки в залежності від часу, отримавого елементу 23 Додатковий вхід 19 зв'язаний з ними для різних відомих пристроїв для подавання направлено залежним датчиком 24, встановленим нитки і різних ниток на плосков'язальній трикотажній машині 2 За доНа фіг 1 схематично зображена постачена помогою фотоелектричного елементу датчик 24 пристроєм 1 для подавання нитки плосков'язальна відстежує хід каретки 9, зокрема у зоні поворотної трикотажна машина 2 Плосков'язальна трикотажточки Датчик 24 генерує на виході сигнал, коли на машина 2 має щонайменше один ряд 4 язичкокаретка 9 проходить через визначену зону у навих голок 5, установлених в ЛІНІЮ, ЯКІ висовуються прямку стрілки 25 або іншими словами, у напрямку вперед і втягуються при ході машини таким чином, до ниткопровідника 7 Процесор 16 використовує щоб утворювати "безперервну хвилю" Подача цей сигнал у якості додаткового критерію для кежорсткої, тобто нееластичної нитки 6 до голок 5 рування регулятором 15 Датчик 24 також генерує здійснюється ниткопровідником 7, який приводится сигнал, що характеризує швидкість каретки 9, що у зворотно-поступальний рух у напрямку позначепроходить мимо нього, і подає цей сигнал на проному стрілкою 8 Каретка 9, яка рухається назад і 14 13 49850 цесор 16 У разі потреби для відстежування руху від швидкості переміщення каретки 9 Як тільки на каретки можна встановити додатковий датчик у процесор 16 надходить сигнал від датчика 24, або ВІДПОВІДНІЙ поворотній точці з протилежної сторонезабаром після цього, процесор 16 ВІДПОВІДНИМ ни Він аналогично з'єднаний з процесором 16 чином запускає дисковий роторний кроковий двигун 14, внаслідок чого він розганяється до такої Для завдання керуючого відхилення, яке пошвидкості, що натяг нитки спочатку падає і з'являвинно бути подане на регулятор 15, процесор 16 ється певний резерв нитки на відрізку між ниткоформує сигнал, який є різницею між сигналом на подавальним барабанчиком 13 і ниткопровідником вході 17 керуючих значень і сигналом на вході 18 7, який і відвертає появлення надмірного рівня реальних значень При сталому режимі роботи натягу нитки регулятора ця різниця визначає керуюче відхилення Далі, додатковий вхід 19 служить у певному Цей процес детально проілюстрований на розумінні для моделювання керуючого відхилення, фіг 5 Крива І, що виконана крихітними кружечканавіть якщо натяг нитки 6 має керуюче значення ми, є графік натягу нитки як функція часу Коли або знаходиться у межах заданого поля допусків каретка 9 зустрічається з ниткопровідником 7 у Таким чином, як стане очевидним з нижченаведемомент часу контакту Е, дисковий роторний кроконого опису роботи, пристрій 1 для подавання ниток вий двигун 14 вже заздалегідь запущений під час може, на основі прогнозної оцінки, компенсувати запуску S у ВІДПОВІДЬ на надходження сигналу від майбутню різку зміну споживання нитки Датчик 24 датчика 24 Спочатку він повільно розганяється у виробляє сигнал, що містить інформацію про ріВІДПОВІДНОСТІ з профілем сигналу керуючих знавень споживання нитки у найближчому майбутчень і до часу контакта Е він досягає швидкості, ньому Це досягається шляхом реєстрації і видачі яка менше швидкості обертання, потрібної для інформації про переміщення каретки 9 до ниткопподачі нитки 6 Отже, натяг нитки спочатку падає у ровідника 7 Різкий скачок у споживанні нитки має ВІДПОВІДНИЙ проміжок часу від часу запуска S до місце незабаром після видачі такої інформації, часу контакта Е, оскільки подача нитки вже почаколи каретка 9 ударяє по ниткопровіднику 7 і різко лася без ВІДПОВІДНОГО її споживання прискорює його переміщення у відповідному наУ момент контакту Е споживання нитки різко прямку, від нуля до практично постійного значензростає від нуля до максимального значення В ня Цей сигнал датчика 24 вказує, що вказаний цей проміжок часу дисковий роторний кроковий скачок станеться в найближчому майбутньому двигун 14 прискорюється, переважно з використанням максимально можливого прискорення, до Така адаптована подача нитки може зробити розрахованого потрібного числа обертів, яке досямагазин для нитки непотрібним навіть у випадку гається в момент часу В Задається декілька менжорстких ниток, при цьому увесь шлях, за винятша КІЛЬКІСТЬ обертів, ніж та, що потрібна для наком зони чутливого елементу 23, може задаватись ступної подачі нитки 6 Задавання значно меншого елементами 27, 28 з жорсткою опорою, а також рівня числа обертів має на меті забезпечити якоіншими елементами (не показані) мога більш швидке зростання рівня натягу нитки Детально робота пристрою 1 для подавання до керуючого значення на протязі часу прискоренниток, описаного вище, відбувається наступним ня дискового роторного крокового двигуна 14 за чином проміжок часу від момента S до момента В Однак, Поки датчик 24 не видає сигнал, процесор 16 завдяки попереднього подання нитки 6 в проміжок виводить на свій вихід сигнал керуючого відхиленчасу від момента пуска S до момента контакта Е, ня, який відповідає різниці рівня натягу, виміряного вдається запобігти надмірного збільшення натягу датчиком натягу 22 і керуючого значення, що винитки з перевищенням керуючого значення Віддається генератором 21 керуючих значень Керустежування рівня натягу нитки, яке водночас здійючі відхилення перетворюються регулятором з снюється датчиком натягу нитки 22, дозволяє завикористанням П-, ПІ- або ПІД-характеристики і у побігти падіння натягу нитки у ВІДПОВІДЬ на дуже вигляді ПОСЛІДОВНОСТІ імпульсів подаються на дисзначну попередню подачу нитки ковий роторний кроковий двигун 14 через запускаючу схему, що входить в регулятор 15 РегуляОднак слід пам'ятати, що процесор 16 і регутор може бути виконаний або як регулятор лятор 15 також можуть працювати у режимі керубезперервної дії або як регулятор дискретного вання з незамкненим контуром без урахування типу За допомогою ниткоподавального барабанреальних значень натягу нитки з моменту часу S і чика 13 регулятор 15 забезпечує подачу точно до момента часу В Проте, коли дисковий ротортакої КІЛЬКОСТІ нитки, яка необхідна для підтримуний кроковий двигун 14 досягає у момент часу В вання потрібного рівня її натягу і для зведення до потрібної КІЛЬКОСТІ обертів, регулятор перемикамінімуму або до нуля керуючого відхилення Поється на режим замкненого контуру і починає точступові і/або менші змінювання у рівні споживання но регулювати натяг нитки Сигнал датчика натягу нитки визначаються і компенсуються на основі нитки 22, до того часу у деякому ступені демпфінатягу нитки руваний, тепер керує процесором і регулятором 15 Однак, коли каретка 9 проходить мимо датчика 24 у напрямку, позначеному стрілкою 25, незаПадіння натягу нитки на деяку малу величину баром повинно мати місце різке зростання у споперед початком процесу в'язання не приводить до живанні нитки від нуля до максимального погіршення якості в'язаних виробів, так як операція значення Величина проміжку часу між появою в'язання ще не почалась Навпаки, завдяки виклюсигналу, генерованого датчиком 24 і різкою зміною ченню піка натягу нитки на початку операції в'яу споживанні нитки, залежить від відстані від точки зання, в'язані вироби стають більш однорідними і переключення датчика 24 до ниткопровідника 7 і їх якість зростає 15 Коли цикл Т завершується, тобто коли ниткопровідник 7 зупиняється у дальньому, по відношенню до пристрою 1 для подавання ниток, КІНЦІ ряду 4, споживання нитки різко припиняється, у той час, як продовжується подавання нитки і буде подано деяка КІЛЬКІСТЬ нитки, оскільки дисковий роторний кроковий двигун 14 характеризується при зупинці деяким моментом інерції, що приводить до певного падіння рівня натягу нитки Однак, це не робить шкідливого впливу, так як в цей момент часу в'язання петель ще не відбувається Коли під час зворотного ходу R ниткопровідника 7 відновлюється споживання нитки, натяг нитки відразу ж збільшується Оскільки на зворотному ході споживання нитки порівняно мале, коливання у споживанні нитки, що мають місце, можуть бути легко компенсовані регулятором з виключенням пиків натягу нитки Як видно з кривої 40, представленої невеликими трикутниками на фіг 5, рівень натягу нитки між циклом Т і зворотним ходом R можна також збільшити за допомогою обертання дискового роторного крокового двигуна 14 у протилежному напрямку Такий же ефект, що і при короткочасному реверсуванні, можна забезпечити за допомогою передчасної зупинки дискового роторного крокового двигуна 14 Однак, з точку зору виключення ПІКІВ натягу кращим є перший варіант На фіг 5 також представлені криві натягу нитки, що характеризують пристрої для подавання нитки відомого рівня техніки Крива II, що виконана пунктиром, представляє графік натягу нитки у залежності від часу, характеризуючий пристрій для подавання ниток, відомий з патенту Німеччини DE 36 27 731 Цей пристрій для подавання ниток містить магазин для нитки, утворений поворотним важелем з кінцевим вушком Нитка проходить через вушко під гострим кутом, так що більший і менший поворот важеля дозволяє використовувати резерв нитки, прискорене переміщення важеля при використанні резерву нитки приводить до виникненню ПІКІВ 41, 42, які можуть спричинити розрив нитки Як показує крива III, значні піки 43, 44 виникають навіть при використанні ниток еластичного типу Якщо пристрій для подавання ниток зі звичайною системою управління з замкненим контуром передбачає створення резерву нитки між ниткоподавальним барабанчиком і трикотажною машиною, яке основане на використанні не механічних рухомих частин, а внутрішньої еластичності, яка притаманна еластичній нитці, цьому пристрою відповідає графік натягу нитки, представлений кривою реальних значень, зображеної на фіг 5 Зразу ж після момента контакту Е має місце різке збільшення рівня натягу нитки, яке у більшому ступені компенсується при використанню пристрою для подавання нитки, представленого на фіг 1, навіть у випадку подачі жорсткої нитки 6 На фіг 2 представлений модифікований варіант пристрою для подавання ниток, зображеного на фіг 1 Тут, замість датчика 24, на плосков'язальній трикотажній машині установлений датчик 51 визначення стану руху елемента трикотажної машини, який зв'язаний з додатковим входом 19 процесора 16 У цьому варіанті додатковий вхід 19 49850 16 виконаний таким чином, що завдяки йому можна забезпечити, щонайменше, періодичне складання подаваного сигналу з різницею, формованої на основі сигналів на вході 17 керуючих значень і вході 18 реальних значень Аналогічного ефекту можна досягти, якщо при переміщенні ниткопровідника 7 від пристрою 1 для подання ниток забезпечити деяке зменшення керуючого сигналу, що виробляється генератором 21, і/або забезпечити деяке збільшення цього сигналу при переміщенні ниткопровідника у протилежному напрямку (компенсація перемінних величин, обумовлених перешкодами) Це дозволяє компенсувати різницю у силах тертя, що діють у різних фазах роботи, яка обумовлена різною швидкістю переміщення нитки, при цьому, якщо ідентичний натяг нитки при ході уперед дозволяє компенсувати різницю в силах тертя, що діють у різних фазах роботи, яка обумовлена різною швидкістю руху нитки, при цьому, якщо збільшення рівня натягу вибрано вірно, можна отримати ідентичний натяг нитки при ході вперед і зворотному ході Внаслідок чого компенсується різниця між ходом вперед і зворотним ходом, познана буквою D на фіг 5 Запустивши заздалегідь дисковий роторний кроковий двигун 14, який у цьому випадку забезпечить попередню подачу нитки, можна забезпечити компенсацію, яка полягає в обмеженні у часі перемінної збурень Ще один модифікований варіант пристрою 1 для подавання нитки, зображений на фіг 3, можна реалізувати без втручання у роботу плосков'язальної трикотажної машини 2 або встановлених на ній датчиків Пристрій 1 для подавання ниток постачений модулем 52, який аналізує змінювання у часі сигналу натягу нитки, який з'являється на виході датчика 22 натягу нитки Якщо зміна цього сигналу у часі характеризується повторенням певних параметрів, модуль 52 визначає період дії цих параметрів і на основі допущення, що і надалі ці параметри будуть діяти на протязі одного і того ж періоду, виробляє прогнозну оцінку рівня натягу нитки на визначений прогнозований період часу Після ТОГО, ЯК спостережені максимуми і мінімуми натягу нитки були усунені ВІДПОВІДНИМИ рівнями и споживання, модуль 52 генерує сигнал споживання нитки, який виступає попереду реальному споживанню нитки і який можна використати замість вихідних сигналів датчика 24 або датчика 51 (фіг 1 і фіг 2) У ще одному більш проробленому варіанті вихідний сигнал модуля 52 накладається на сигнал керуючого значення генератора 21 керуючих значень, так що забезпечується профіль керуючих значень Таке накладення дозволяє усунути спостережені раніше керуючі відхилення і отримати сталий рівень натягу нитки Замість модуля 52, процесор 16 може містити модулюючий блок, який дозволяє визначити очікуваний рівень споживання нитки 6 а потім урахувати його у наступній роботі системи керування з замкненим контуром Модулюючий блок забезпечує моделювання роботи керуючої системи з урахуванням усіх існуючих факторів, що чинять вплив У ще одному альтернативному варіанті, зображеному у вигляді пунктирної лінії зв'язком 53 17 49850 на фіг 3, модуль 52 може також задавати характеристики регулятора 15, дозволяючи прискорити перехідні процеси Подачу нитки, яка максимально пристосована до даної операції в'язання, досягають пристроєм 1 для подавання нитки, зображеним на фіг 4, з'єднаним з процесором 54, передбаченим у трикотажній машині 2 Цей процесор зв'язаний з пристроєм 55 пам'яті узорів, на основі даних якого розраховується поточна і майбутня потреба у нитці У альтернативному варіанті процесор 54 через датчики (докладно не показані) з'єднаний з елементами трикотажної машини, так що він визначає поточні робочі положення ниткопровідника 7 й голок 5, або ж робоче положення отримують безпосередньо на основі значень положення регулятора машини з розімкненим контуром Процесор 54 виводить сигнали на окремий вихід, передбачений для цієї мети, і подає їх на додатковий вхід 19, які оброблюються процесором 16 одним з вищеописаних способів Вони можуть оброблюватись в обстановці компенсації перемінного збурення, або адекватного керування замкненим контуром, або у якості додаткових параметрів У цьому випадку регулятор прагне відрегулювати подачу нитки таким чином, щоб не тільки забезпечити сталий натяг нитки таким чином, щоб не тільки забезпечити сталість натягування нитки, але також і забезпечити подання достатньої КІЛЬКОСТІ НИТКИ З урахуванням майбутньої потреби у нитці У результаті може бути досягнуто компроміс, наприклад, завдяки того, що процесор 16 з'єднує сигнал, що виробляється датчиком 22 натягу нитки, і/або сигнал генератора 21 керуючих значень з сигналом процесора 54 Регулятор може бути виконаний з можливістю обробки поданих сигналів з використанням неперервної логіки Таким чином датчик 24, що відстежує хід каретки 9 (фиг 1), датчик 51 визначення стану руху елемента трикотажної машини (фіг 2), модуль 52 (фігЗ) або модулюючий блок, що його замінює, а також пристрій 55 пам'яті узорів, постачений процесором 56 (фіг 4) є різними варіантами виконання пристрою формування сигналу, що містить інфор 18 мацію про майбутнє споживання нитки Крім того, у кожному з вищеописаних пристроїв 1 для подавання нитки можна забезпечити магазин для нитки, розміщений між ниткоподавальним барабанчиком 13 і плосков'язальною трикотажною машиною 2 Магазин для нитки може бути виконаний у вигляді важільного накопичувального пристрою або, у разі еластичної нитки, у вигляді відрізка шляху, у межах якого нитка здатна проявляти достатню пружність Пристрій 1 для подавання нитки, призначений, зокрема, для подавання жорстких ниток і, більш конкретно, сконструйований для використання у трикотажних машинах 2, що характеризуються значними тимчасовими коливаннями потреби у нитці Пристрій 1 для подавання нитки містить ниткоподавальний барабанчик 13 з обертальним приводом, який у ідеальному випадку подає нитку безпосередньо у трикотажну машину 2 або до и ниткопровідника 7 без проміжних і нитконакопичувальних пристроїв Постійний контроль натягу нитки здійснюється з використанням датчика 22 натягу нитки, який забезпечує виміряні значення для регулятора 15, 16 з замкненим контуром, керуючого подачею нитки через ниткоподавальний барабанчик 13 Крім того, регулятор 15, 16 виконаний таким чином, що він може обробляти сигнали, що містять інформацію про майбутню потребу у нитці Таким чином, у випадку майбутньої різкої зміни потреби, наприклад, аналогічної змінам, які періодично відбуваються у плосков'язальних трикотажних машинах у крайових зонах в'язаних виробів (поворотні точки руху ниткопровідника), регулятор 15, 16 може спрацьовувати так, щоб забезпечити або попередню подачу нитки, або припинити її подачу Таким шляхом можна забезпечити компенсацію пиків і різких спадів натягу нитки Регулятор 15, 16 можна виконати так, щоб він працював як регулятор з замкненим контуром і періодично як регулятор з розімкненим контуром Також можливі і ІНШІ варіанти його виконання, при яких досягається, наприклад, компенсація перемінної обурень, погодження параметрів і т п 19 27 23 28 ФІГ. 2 21 22 49850 17 19 16 15 53 21 14 52 -22 7/WS-4 27 23 •28 ФІГ. 3 ФІГ. 4 13 23 49850 24 42 44 S Ё ФІГ. 5 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюElectronic controlled unit for thread supply
Назва патенту російськоюЭлектронное управляемое устройство для подачи ниток
МПК / Мітки
МПК: D04B 15/38
Мітки: ниток, електронної, пристрій, керований, подавання
Код посилання
<a href="https://ua.patents.su/12-49850-elektronno-kerovanijj-pristrijj-dlya-podavannya-nitok.html" target="_blank" rel="follow" title="База патентів України">Електронно керований пристрій для подавання ниток</a>
Пристрій для подавання ниток

Номер патенту: 43353
Опубліковано: 17.12.2001
Автори: Кауфман Ріхард, Вьорнер Хрістоф, Леополд Гунтер
МПК: D04B 15/38, B65H 51/00
Мітки: ниток, подавання, пристрій
Формула / Реферат:
1. Устройство подачинитей, в частности, эластомерных нитей, содержащее корпус, стенки которого образуют полость и который вдоль стыкового шва разделен на корпусные детали, по меньшей мере один первый установочный валик, который стационарно закреплен и установлен на корпусе с возможностью вращения вокруг первой оси вращения, по меньшей мере один второй установочный валик, который закреплен на расстоянии параллельно первому установочному...
Муфта для пристрою для подавання ниток
Номер патенту: 45427
Опубліковано: 15.04.2002
Автори: Шмодде Герман, Кауфман Ріхард, Лампрехт Алфред
МПК: D04B 15/38, F16D 11/00
Мітки: муфта, пристрою, ниток, подавання
Формула / Реферат:
1. Муфта для пристрою для подавання ниток, що містить щонайменше одну першу півмуфту, яка установлена з можливістю обертання і з'єднана з ведучим пристроєм, і має перший взаємозачіпний з'єднувальний елемент,другу півмуфту, яка встановлена з можливістю обертання концентричне відносно першої півмуфти і з'єднана з веденим пристроєм, і яка має другий взаємозачіпний з'єднувальний елемент,причому, щонайменше одна з півмуфт...
Пристрій для зберігання та подавання сипких матеріалів
Номер патенту: 201
Опубліковано: 31.08.1998
Автори: Петрунькін Григорій Валер'янович, Смокій Ігор Петрович
МПК: B28C 5/38
Мітки: пристрій, сипких, зберігання, подавання, матеріалів
Формула / Реферат:
Пристрій для зберігання та подавання сипких матеріалів, який включає раму, візок, дві поздовжньо розміщені циліндричні ємкості, призначені для роботи під тиском, компресор, дозатор і матеріальний трубопровід, який відрізняється тим, що циліндричні ємкості встановлені по діагоналі одна над одною таким чином, що поперечний габарит пристрою менше суми діаметрів цих ємкостей.
Пристрій для контролю товщини волокон і ниток
Номер патенту: 44505
Опубліковано: 15.02.2002
Автори: Супрун Наталя Петрівна, Футимський Сергій Ігорович, Хоменко Олег Миколайович, Скрипник Юрій Олексійович
Мітки: контролю, волокон, пристрій, ниток, товщини
Формула / Реферат:
Пристрій для контролю товщини волокон і ниток, який містить вимірювальний і зразковий ємнісні первинні перетворювачі, які складаються з трьох пластинчатих металічних електродів, високопотенціального, низькопотенціального і середнього, комутатор, коливальний контур, послідовно з'єднані підсилювач низької частоти, синхронний детектор низької частоти і реєстратор, вихід підсилювача низької частоти, з'єднаний з керуючими входами комутатора і...
Прилад управління натягом ниток основи на ткацьких верстатах
Номер патенту: 40456
Опубліковано: 16.07.2001
Автори: Трубіна Олена Анатоліївна, Тіманов Віктор Миколайович, Чугін Валерій Віталійович
МПК: D03D 49/04
Мітки: ниток, ткацьких, верстатах, основі, управління, натягом, прилад
Формула / Реферат:
Прилад управління натягом ниток основи на ткацьких верстатах, що містить механізм приводу натискувальних планок, розташований по обидва боки ткацького верстату з можливістю хитання відносно горизонтальної осі і змонтований між ними засіб компенсації натягу ниток основи у вигляді пари натискувальних планок, одна із яких розташована над верхньою площиною основних ниток, а друга - під нижньою площиною основних ниток, який відрізняється тим, що...
Попередній патент: Передача та підшипник для неї
Наступний патент: Пристрій для подавання еластичних ниток
Випадковий патент: Пристрій для полімеризації композитних матеріалів