Спосіб вимірювання осьової складової сили різання на аеростатичну шпиндельну опору
Номер патенту: 70557
Опубліковано: 15.10.2004
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович
Формула / Реферат
Спосіб вимірювання осьової складової сили різання на аеростатичну шпиндельну опору, який включає перетворення осьової складової сили різання в електричний сигнал, індикацію осьової складової сили різання, який відрізняється тим, що будують функціональну залежність ![]() між величиною осьової складової сили різання
між величиною осьової складової сили різання ![]() і складовою
і складовою ![]() управляючої напруги
управляючої напруги ![]() яка дорівнює відхиленню вимірюваної напруги системи автоматичного управління положенням площини планшайби аеростатичної шпиндельної опори від опорної напруги цієї системи автоматичного управління, причому складова напруга
яка дорівнює відхиленню вимірюваної напруги системи автоматичного управління положенням площини планшайби аеростатичної шпиндельної опори від опорної напруги цієї системи автоматичного управління, причому складова напруга ![]() забезпечує усунення зміщення вала аеростатичної шпиндельної опори регуляторами осьового положення вала цієї опори під діянням осьової складової сили різання, будують функціональну залежність
забезпечує усунення зміщення вала аеростатичної шпиндельної опори регуляторами осьового положення вала цієї опори під діянням осьової складової сили різання, будують функціональну залежність ![]() між величиною осьового зміщення вала аеростатичної шпиндельної опори на величину його осьової температурної деформації
між величиною осьового зміщення вала аеростатичної шпиндельної опори на величину його осьової температурної деформації ![]() регуляторами осьового положення вала цієї аеростатичної шпиндельної опори відносно його початкового положення і приростом
регуляторами осьового положення вала цієї аеростатичної шпиндельної опори відносно його початкового положення і приростом ![]() величини початкового значення опорної напруги
величини початкового значення опорної напруги ![]() яка відповідає початковому положенню вала аеростатичної шпиндельної опори, будують функціональну залежність
яка відповідає початковому положенню вала аеростатичної шпиндельної опори, будують функціональну залежність ![]() між складовою
між складовою ![]() згаданої управляючої напруги
згаданої управляючої напруги ![]() причому складова напруга
причому складова напруга ![]() забезпечує компенсацію осьової температурної деформації вала аеростатичної шпиндельної опори регуляторами осьового положення вала, і величиною
забезпечує компенсацію осьової температурної деформації вала аеростатичної шпиндельної опори регуляторами осьового положення вала, і величиною ![]() осьової температурної деформації вала цієї опори, вимірюють осьову складову
осьової температурної деформації вала цієї опори, вимірюють осьову складову ![]() сили різання, для чого установлюють глибину різання і виконують точіння або шліфування, з дискретою часу
сили різання, для чого установлюють глибину різання і виконують точіння або шліфування, з дискретою часу ![]() у якій осьове зміщення планшайби аеростатичної шпиндельної опори відносно незбуреного положення не перевищує допустимої величини, вимірюють і запам'ятовують величину
у якій осьове зміщення планшайби аеростатичної шпиндельної опори відносно незбуреного положення не перевищує допустимої величини, вимірюють і запам'ятовують величину ![]() осьової температурної деформації вала аеростатичної шпиндельної опори, по функціональній залежності
осьової температурної деформації вала аеростатичної шпиндельної опори, по функціональній залежності ![]() розраховують величину
розраховують величину ![]() приросту початкового значення опорної напруги
приросту початкового значення опорної напруги ![]() розраховують скоректовано значення
розраховують скоректовано значення ![]() опорної напруги, коректують осьове положення вала аеростатичної шпиндельної опори і стабілізують осьове положення планшайби, в процесі різання на фіксованому куті повороту вала на кожному його повороті вимірюють напругу
опорної напруги, коректують осьове положення вала аеростатичної шпиндельної опори і стабілізують осьове положення планшайби, в процесі різання на фіксованому куті повороту вала на кожному його повороті вимірюють напругу ![]() на виході опорної наруги і напругу
на виході опорної наруги і напругу ![]() на виході вимірюваної напруги і обчислюють управляючу напругу
на виході вимірюваної напруги і обчислюють управляючу напругу ![]() як відхилення вимірюваної напруги від опорної напруги, по функціональній залежності
як відхилення вимірюваної напруги від опорної напруги, по функціональній залежності ![]() по величині
по величині ![]() осьової температурної деформації вала аеростатичної шпиндельної опори обчислюють складову
осьової температурної деформації вала аеростатичної шпиндельної опори обчислюють складову ![]() управляючої напруги
управляючої напруги ![]() а також обчислюють складову
а також обчислюють складову ![]() управляючої напруги
управляючої напруги ![]() по функціональній залежності
по функціональній залежності ![]() на кожному n-му оберті вала аеростатичної шпиндельної опори обчислюють величину осьової складової
на кожному n-му оберті вала аеростатичної шпиндельної опори обчислюють величину осьової складової ![]() сили різання, по вимірах осьової складової
сили різання, по вимірах осьової складової ![]() сили різання на N обертах вала аеростатичної шпиндельної опори обчислюють її асимптотично незміщену оцінку
сили різання на N обертах вала аеростатичної шпиндельної опори обчислюють її асимптотично незміщену оцінку ![]() і приймають її як істинне значення осьової складової сили різання на аеростатичну шпиндельну опору.
і приймають її як істинне значення осьової складової сили різання на аеростатичну шпиндельну опору.
Текст
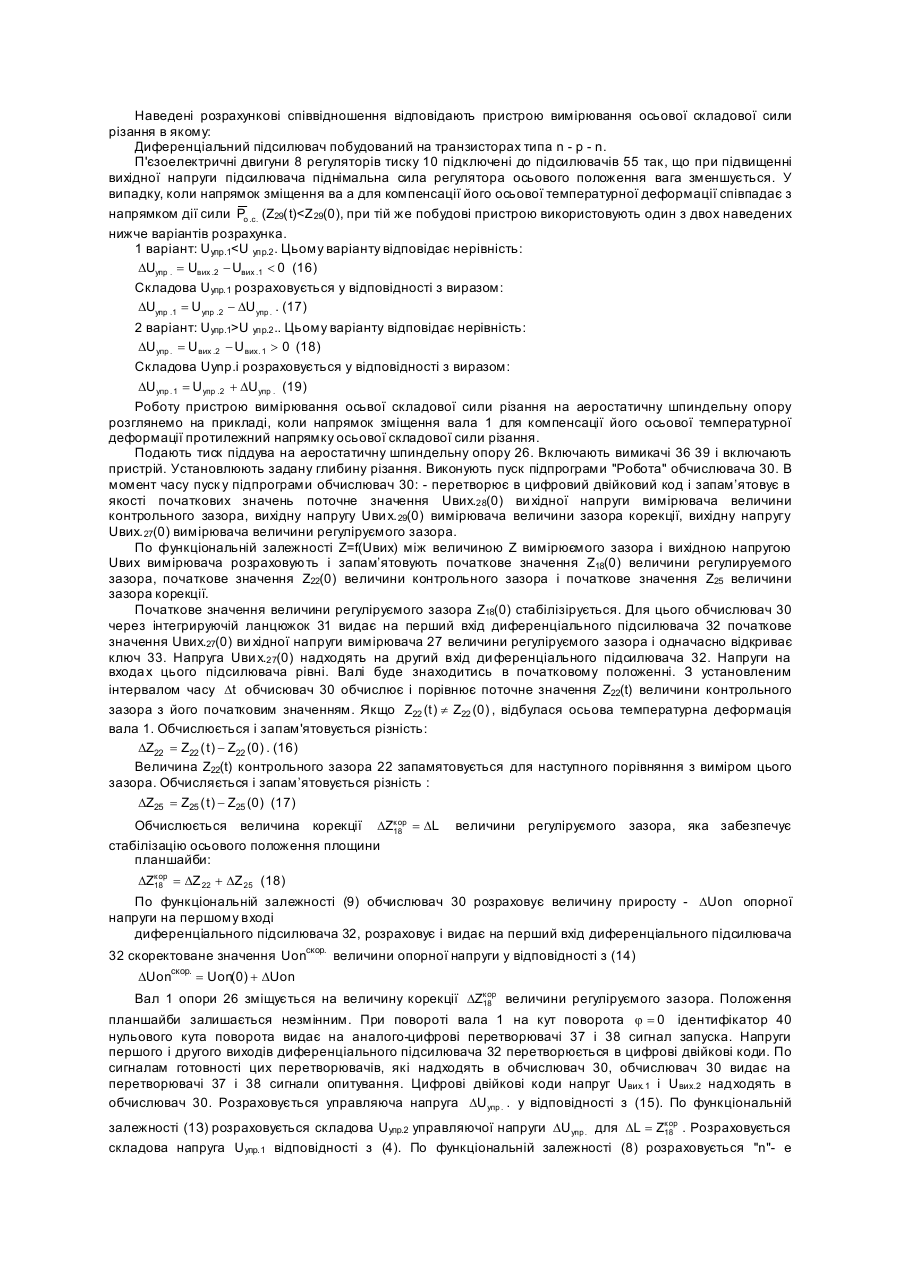
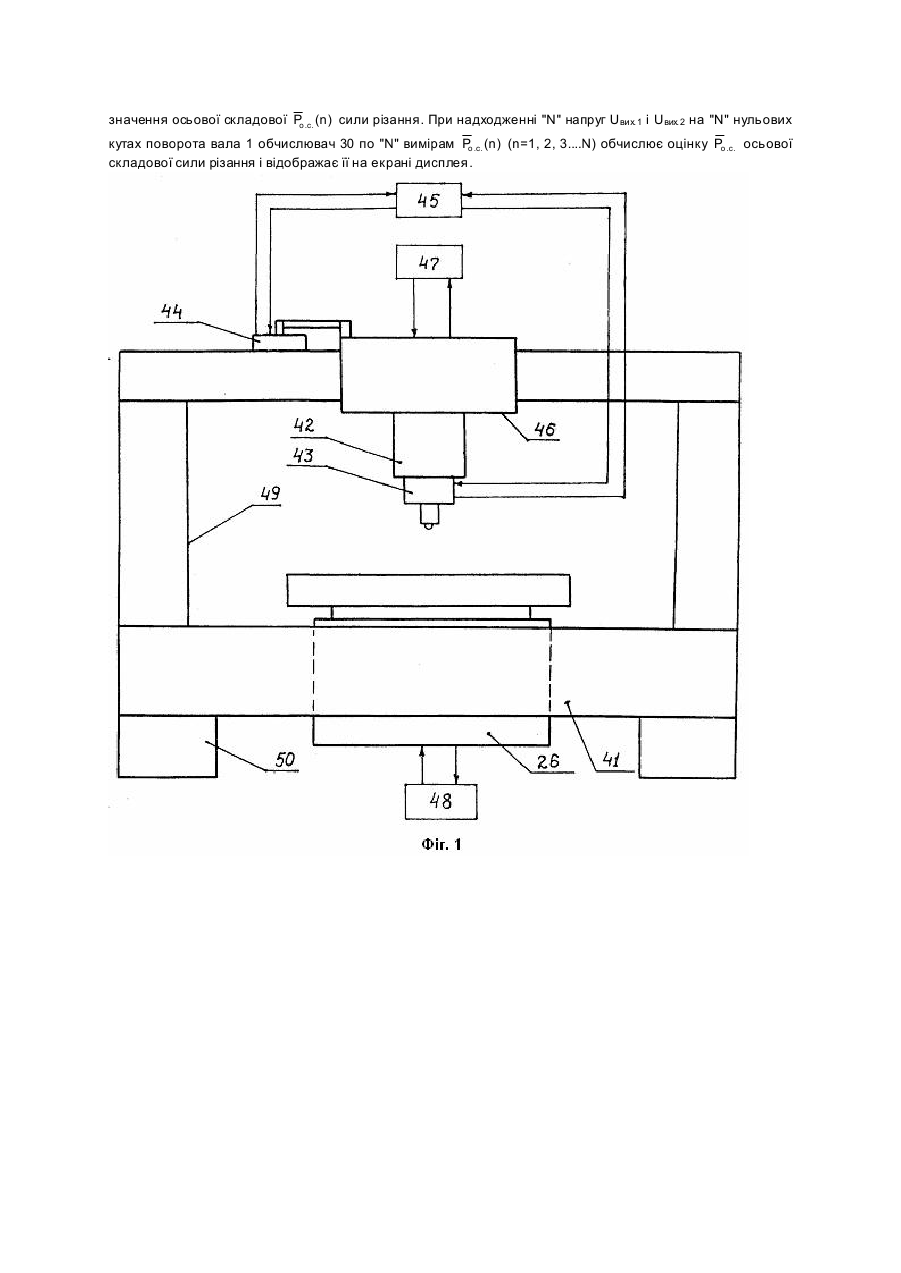
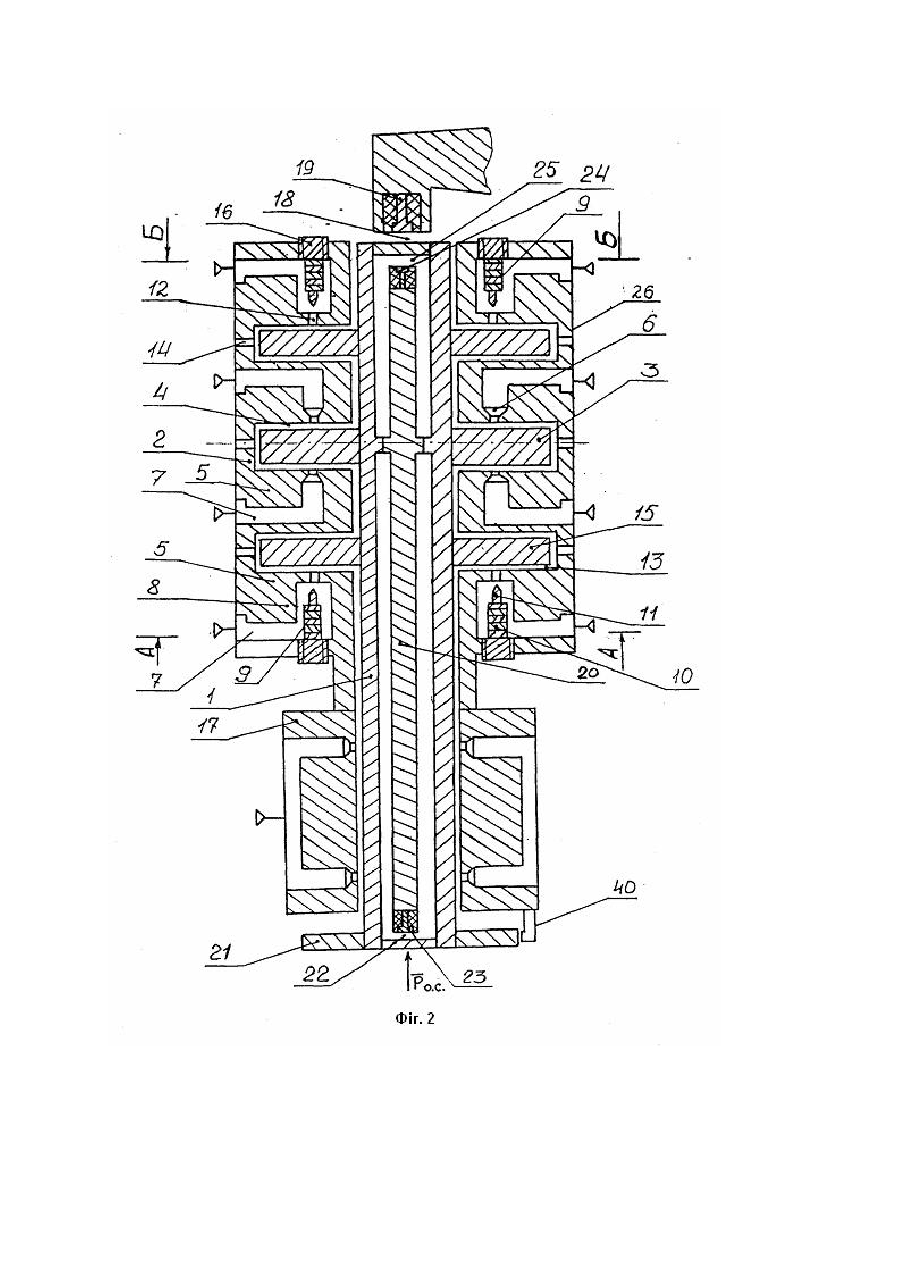
Спосіб відноситься до області вимірювання сил різання при обробці елементів оптики і механіки на токарних і шлі фувальних прецизійних верстата х з високою точністю. По а.с. СРСР№1515081 А1 М.кл 5. G01 L 9/04 від 15.10.89 р. бюл 38 відомий "Пристрій для вимірювання тиску". Спосіб, який реалізується цим пристроєм, вибраний у якості прототипа і полягає у наступному. Сила (осьова складова сили різання у даному випадку) через мембрану прикладається до пружного елемента, на якому установлені тензорезистори, що утворюють мостові вимірювальні ланцюги. Сила тиска мостовими вимірювальними ланцюгами перетворюється у електричні сигнали, які підсилюються і складаються. Сумарний сигнал надходить на вимірювальний прибор /індикатор тиска/. Недоліком прототипа є те, що при такому способі вимірювання осьвої складової сили різання ускладняється конструкція і знижується жорсткість прецизійного верстата, а отже, знижується його точність. Тому спосіб вимірювання осьвої складової сили різання прототипа може використовуватися для вимірювання цієї сили тільки при експеріментальних дослідженнях. Задача, що вирішується, полягає у такому удосконаленні способа прототипа, яке забезпечує вимірювання осьвої складової сили різання на аеростатичну шпиндельну опору без зниження жорсткості формоутворюючої системи прецизійного верстата із-за установки додаткового пристрою для вимірювання тиска, а також дозволяє постійно вимірювати і контролювати осьову складову сили різання в бігу усього часу експлуатації прециційного верстата. Рішення цієї задачі досягається тим, що спосіб вимірювання осьової складової сили різання на аеростатичну шпиндельну опору, який включає перетворення осьвої складової сили різання в електричний сигнал, індикації величини осьової складової сили різання, згідно винаходу, будують функціональну залежність Po.c. = f (Uупр .1 ) між величиною осьової складової сили різання Po. c. і складовою Uупр .1 управляючої напруги DUу пр. , яка дорівнює відхиленню вимірюємої напруги системи автоматичного управління положенням площини планшайби аеростатичної шпиндельної опори від опорної напруги цієї системи автоматичного управління, причому, складова напруга U упр .1 забезпечує усунення зміщення аеростатичної шпиндельної опори регуляторами осьового положення вала цієї опори під діянням осьової складової сили різання, будують функціональну залежність DUon = f (D L ) між величиною осьового зміщення вала аеростатичної шпиндельної опори на величину його осьової температурної деформації DL регуляторами осьового положення вала цієї аеростатичної шпиндельної опори відносно його початкового положення і приростом DUon величини початкового значення опорної напруги Uon(0), яка відповідає початковому положенню вала аеростатичної шпиндельної опори, будують функціональну залежність DU упр .2 = f (D L ) між складовою DU упр .2 згаданої управляючої напруги DUу пр. причому, складова напруга DU упр .2 забезпечує компенсацію осьової температурної деформації вала аеростатичної шпиндельної опори регуляторами осьового положення вала, і величиною DL осьової температурної деформації вала цієї опори, вимірюють осьову складову Ро.с. сили різання для чого установлюють глибину різання і виконують точіння або шліфування, з дискретою часу Dt , в бігу якої осьове зміщення планшайби аеростатичної шпиндельної опори відносно незбуреного положення не перевищує допустимої величини, вимірюють і запам’ятовують величину DL осьової температурної деформації вала аеростатичної шпиндельної опори, по функціональній залежності DUon = j( DL ) розраховують величину DUon приросту початкового значення опорної напруги Uon(0), розраховують скоректоване значення Uon опорної напруги DUonскор. = Uon(0) , коректують осьове положення вала аеростатичної шпиндельної опори і стабілізують осьове положення планшайби, в процесі різання на фіксованому куту повороту вала на кожному його повороті вимірюють напругу Uви х. 1 на виході опорної напруги і напругу Uвих.2 на виході вимірюємої напруги і обчислюють управляючу напругу DUупр . як відхилення вимірюємої напруги від опорної напруги DUупр . = Uвих .2 - Uвих .1 , по функціональній залежності U упр .2 = f ( DL ) по величині DL осьової температурної деформації вала аеростатичної шпиндельної опори обчислюють складову U yпp.2 управляючої напруги DUупр . , а також обчислюють складову Uупр .1 управляючої напруги DUупр .1 . Uупр .1 = DU упр . - DU упр .2 , По функціональній залежності Po.c. = f (Uупр .1 ) на кожному "n" оберті вала аеростатичної шпиндельної опори обчислють величину осьової складової Po.c. (n ) сили різання, по вимірам осьової складової Po.c. (n ) сили різання на "N" обертах вала аеростатичної шпиндельної опори обчислюють її асимптотичне незміщену оцінку Po.c. L N P o .c. = å Po.c. (n) / N n =1 І приймають її в якості істинного значення осьової складової сили різання на аеростатичну шпиндельну опору. Причинно-наслідковий зв’язок між сукупістю суттєви х ознак винаходу, що заявляється, з досягаємим технічним результатом полягає у наступному. На фіг.1 представлений варіант схеми формоутворення двохкоординатного прецизійного верстата. Верстат включає станину 41, в якій установлена аеростатична шпиндельна опора 26, яка оснащена пристроєм 48 стабілізації радіального положення осі обертання вала і системою автоматичного управління положенням площини планшайби аеростатичної шпиндельної опори (патент України "Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори" №25727 А від 30. 10.98р)., Патент "Пристрій стабілізації осьвого положення площини планшайби аеростатичної шпиндельної опори". 5I488A від 15.11.2002р. На стояках 49 установлена аеростатична напрямна 46, яка оснащена пристроєм стабілізації положення рухомого елемента (патент України "Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення" №14905 А від 04.03.97р.). Різцева голівка 43 для початкової установки переміщується пристроєм 42 для лінійних переміщень (патент України "Пристрій для лінійних переміщень" №14904 А від 04.03.97.Р.). Рухомий елемент аеростатичної напрямної 46 переміщується п'єзоелектричним двигуном 44 (патент України "П'єзоелектричний двигун" №36957 А від 16.04.2001р.) 45 - пристрій переміщення різця по розрахунковій траєкторії "Спосіб переміщення вершини різця по розрахунковій траєкторії та пристрій для його здійснення" (патент України №52335 А від 16.12. 2002р.). Аеростатична шпиндельна опора 26 цього верстата (без компенсаторів радіального зміщення осі обертання вала) представлена на фіг. 2. Опора включає радіальну аеростатичну опору 17. Силове замикання вала 1 в осьовому напрямку здійснюється осьовою аеростатичною опорою 2. Для стабілізації осьового положення площини планшайби 21 опора 26 наділена аеростатичними регуляторами 8 осьового положення вала 1. З зазором відносно заднього торця вала 1 установлений датчик 19 величини регуліруємого зазора 18. Стабілізація осьового положення площини планшайби 21 здійснюється шляхом періодичної корекції і зберігання незмінною скоректованої величини регуліруємого зазора 18. Для вимірювання осьової температурної деформації вала 1 в порожнині вала установлений вимірювальний стрижень 20, який прикріплений до вала 1 в площині симетрії п'яти 3 осьової аеростатичної опори 2. В торцях вимірювального стрижня 20 з зазорами відносно внутрішніх поверхонь торців вала 1 установлені датчик 24 величини зазора 25 корекції і датчик 23 величини контрольного зазора 22. Ці датчики забезпечують вимірювання осьової температурної деформації ділянок вала 1 опори 26, розташованих по обидві сторони п'яти 3 осьової аеростатичної опори 2. На основі цих вимірювань виконується корекція величини регуліруємого зазора 18 така, що при збереженні скоректованої величини ругуліруємого зазора 18 незмінною забезпечується стабілізація осьового положення площини планшайби незалежно від величини осьового навантаження і осьової температурної деформації вала і при умові, що вони не перевищують піднімальної сили регуляторів 8 осьового положення вала. Функціональна схема (Фіг. 3), яка здійснює управління регуляторами 8, включає вимірювач 27 величини регуліруємого зазора, вимірювач 28 величини контрольного зазора, вимірювач 29 величини зазора корекції, обчислювач 30, інтегрируючій ланцюжок 31, диференційний підсилювач 32, ключ 33, підсилювачі 34 і 35, які зв'язані з п'єзоелектричними двигунами 10 регуляторів 8, аналого-цифрові перетворювачі 37 і 38, вимакачі 36 і 39. Навантаження на аеростатичні регулятори 8 осьового положення вала 1 опори включає три основних складових: Компенсацію осьової складової сили різання Po .c. . Запобігання осьового зміщення вала 1 під дією сили P .Ф. , яка виникає в осьовій аеростатичній опори Р 2 із-за деформації поля тиска у газовому шарі цієї опори погрішностями розмірів і форми її виготовлення. Компенсацію осьової температурної деформації вала 1 опори 26, що стабілізує осьове положення площини планшайби, а отже, і глибину різання. Незмінність глибини різання являється необхідною умовою сталості осьової складової сили різання. Система автоматичного управління осьовим положенням площини планшайби опори 26 являється статичною, тобто системою, в якій при збурюючій дії, яка прямує до сталої величини, відхилення величини, управління якою здійснюється, від її незбуреного стану також прямує до сталої величини, яка відповідає цій дії. Нагадаємо, що принцип управління по відхиленню полягає у тому, що вимірюється вимірюєма величина (регуліруємий зазор 18) і порівнюється з її опорним (задаючім) значенням. Відхилення вимірюємої величини від її опорного (задаючого) значення перетворюється в управляюче діяння, а останнє, змінюючі вимірюєму величину (регулір уємий зазор 18), прагне зменшити або усун ути це відхилення. У даному випадку осьове положення планшайби стабілізується. Точіння здійснюється з сталою глибиною різання. Тому осьову складову сили різання можна уважати сталою величиною. Осьова температурна деформація вала -величина, що змінюється повільно, і на обмеженому відрізку часу вимірювання сили Po .c. , може також уважатися сталою величиною. Силу P .Ф. можна виключати з розгляду наступним чином. Для кожного фіксованого положення кута Р поворота вала 1 значення сили P .Ф. для данної осьової аеростатичної опори 2 є сталою величиною. Р Установимо вал 1 опори 26, наприклад, на кут поворота j = 0 . Виміряємо величину регуліруємого зазора 18 і приймемо його в якості незбуреного значення. Тоді, якщо величину осьової складової сили різання вимірювати при повороті вала на кут j = 0 сила P .Ф. не є збурюючим діянням і повинна бути виключена з Р розгляду. Звідси витікає, що на фіксованому куту повороту вала 1 величина управляючої напруги DUупр . на регулятори 8 осьового положення вала визначається величиною відхилення виміряної величини регуліруємого зазора 18 від його значення, що відповідає незбуреному положенню площини планшайби, а величина відхилення величини зазора 18 від опорного в свою чергу визначається величиною осьового зміщення вала 1 регуляторами 8 для компенсації його осьової температурної деформації, величиною осьової складової Po .c. сили різання і протидією зміщення вала 1, яке створюється осьовою аеростатичною опорою 2. Для визначення осьової складової Po .c. сили різання необхідно визначити, яка частина управляючої напруги DUупр . . на регулятори 8 визначається силою Ро.с. і установити відповідність між величиною цієї частки напруги DUупр . і величиною сили Po .c. . Для рішення цієї задачі попередньо необхідно побудува ти наступні функціональні залежності: Функціональну залежність між величиною осьової складової Po .c. сили різання і складовою Uупр.1 управляючої напруги DUупр . , причому, складова напруга Uупр.1 дорівнює відхиленню вимірюємо (напруги від опорної /на виходах диференціального підсилювача 32 або на виходах підсилювачів 34 і 35), яке виникає в процесі точіння із-за відхилення вимірюємої напруги на їх входах від опорної для запобігання зміщення вала 1 під діянням цієї сили (регуляторами 8): Po .c. = f (Uупр . 1) (1) Функціональну залежність DUon = f ( DL ) (2) між величиною осьового зміщення вала 1 аеростатичної шпиндельної опори 26 на величину його осьової температурної деформації DL відносно його початкового положення і приростом DUon величини опорної напруги Uon(0) (на виході згаданих підсилювачів), яка відповідає початковому (незбуреному) положенню вала 1. Функціональну залежність між складовою Uyпp.2 управляючої напруги DUупр . яка дорівнює відхиленню вимірююємої напруги від опорної (на виході диференціального підсилювача 32 або підсилювачів 34 і 35), причому, складова напруга Uyпp.2 забезпечує компенсацію осьової температурної деформації вала 1 опори 26 регуляторами 8 осьового положення вала, і величиною DL осьової температурної деформації вала 1: DU упр . 2 = f ( DL ) (3) Функціональна залежність Z = f(U) між величиною вимірюємого зазора і вихідною напругою вимірювача величини зазору відома. Виконують точіння з заданою глибиною різання. В момент часу початка точіння (t=0) вимірюють і запамятовують початкове значення Z18(0) величини регуліруємого зазора, а положення планшайбі приймають в якості її незбуреного положення. В процесі точіння з установленим інтервалом часу Dt вимірюють величину осьової температурної деформації вала 1 опори 26 і коректують величину Z 18 регуліруємого зазора. Положення планшайби залишається незмінним. Стабілізують скоректовану величину регулір уємого зазора. На фіксованому куту поворота, наприклад, j = 0 на кожному повороті вала вимірюють управляючу напругу DUупр . між входами, наприклад, диференціального підсилювача 32, яка визначається величиною осьової температурної деформації вала DL , величиною осьової складової Po .c. сили різання і протидією зміщення вала 1 з боку осьової аеростатичної опори 2. Нехай напрямок зміщення вала 1 для компенсації його осьової температурної деформації протележний напрямку осьової складової Po .c. По величині DL осьового зміщення вала 1 із функціональної залежності (3) розраховують величину напруги U yпp.2. Розраховують величину напруги Uупр.1 як різницю напруг DUупр . і Uупр2 : DUупр .1 = DU упр . - U упр .2 (4) По функціональній залежності (1) розраховують величину P .c. (n ) осьової складової соли різання на o "n"-му оберті вала 1. В якості оцінки Po .c. приймають її середнє значення по вимірюванням на "N" суміжних обертах вала 1 опори 26: L N P o .c. = å Po.c. (n) / N n =1 :(5) Винахід пояснюється кресленнями Фіг. 1 - прецезійний двухкоординатний верстат (схема формоутворювання). Фіг. 2 - аеростатична шпиндельна опора з регуляторами осьового положення вала. Фіг. 3 - пристрій вимірювання осьової складової сили різання (функціональна схема). Пристрій вимірювання осьової складової сили різання на аеростатичну шпиндельну опору включає (фіг.2) вал 1, осьову аеростатичну опору 2, яка включає п'яту 3, укріплену на валу 1. По обидві сторони п'яти 3 з зазорами 4 відносно неї розташовані підп'ятники 5, в яких виконані жиклери 6 подачі газа у зазори 4.7- камери піддува. По обидві сторони осьової аеростатичної опори 2 установлені регулятори 8 осьвого положення вала 1, які складаються з п'єзоелектричних регуляторів 9 тиска. Кожний п'єзоелектричний регулятор 9 тиска включає п'єзоелектричний двигун 10 з встановленою на ньому голкою 11 для зміни площі поперечного переріза підводящого канала 12 газа в зазор 13 регулятора 8, 14 - випускні вікна. Зазори 13 регуляторів 8 осьового положення вала утворені підп'ятниками 5 і жорстко закріпленими на валу 1 дисками 15. Причому, п'єзоелектричні двигуни 10 установлені на регулювальних гвинтах 16, що забезпечує зміщення п'єзоелектричних двигунів 10 разом з встановленими на них голками 11 вздовж осі симетрії підводящих каналів 12, для установлення початкового значення площ поперячних перерізів цих підводящіх каналів 12. Силове замикання вала 1 в радіальному напрямку забезпечується радіальною аеростатичною опорою 17. Регуліруємий зазор 18 утворений торцем вала 1 і основою датчика 19 величини регуліруємого зазора. По зміні величини регулируемого зазора 18 визначають величину осьового зміщення вала 1. Вал 1 виконують порожнистим. В порожнині вала установляють вимірювальний стрижень 20, виконаний з матеріала з малим або нульовим коефіцієнтом температурного розширення. Вимірювальний стрижень 20 прикріплений до внутрішньої поверхні вала 1 в площині симетрії п'яти 3. При зміні температури вала 1 його відрізки, що лежать по обидві сторони площини симетрії п'яти 3 вільно змінюють свою довжину відносно вимірювального стрижня 20, 21 - планшайба, 22-контрольний зазор (фіг. 2.). В ближній до планшайби 21 торець стрижня 20 встановлений датчик 23 величини контрольного зазора. На другому торці стрижня 20 установлений датчик 24 величини зазора 25 корекції, утвореного внутрішньою поверхнею цього торця вала 1 і основою датчика 24 величини зазора корекції. Вимірювання величини контрольного зазора 22 і величини зазора 25 корекції забезпечує можливість виміру величини осьової температурної деформації вала 1 і стабілізації осьового положення площини планшайби 21. Елементи 1÷25 утворюють аеростатичну шпиндельну опору 26. Сигнали датчиків 19, 23 і 24 (Фіг. 3) перетворюються вимірювачем 27 величини регуліруємого зазора, вимірювачем 28 величини контрольного зазора і вимірювачем 29 величини зазора корекції, відповідно, в напруги, які відповідають величинам цих зазорів. В якості вимірювачів величин зазорів використовуються вимірювачі мікропереміщень, що наведені в монографії (Гриневич Б.Ф. "Измерительные компенсационно - мостовые устройства с емкостными датчиками", Київ, Наукова Думка, 1987р.) Вихідні напруги вимірювачів 27, 28 і 29 надходять в обчислювач 30. Обчислювач 30 забезпечує розрахунок осьової складової сили різання. В якості обчислювача 30 може використовуватися персональна ЕОМ, яка оснащена модулем уводу - виводу для обміну інформацією з функціональними елементами (Науман Г. "Стандартные интерфейсы для измерительной техники" М., Мир, 1982р.). Інтегрируючій ланцюжок 31 служить для огладжування вихідної напруги обчислювача 30, що ступінчасте змінюється. 32 - диференціальний підсилювач. Різниця потенціалів на його виходах відповідає різниці потенціалів на його входах. Напруга з вимірювача 27 величини регуліруємого зазора на перший вхід ди ференціального підсилювача 32 надходить через електронний ключ 33. Підсилювачі 34 і 35 підсилюють сигнали диференціального підсилювача 32, які надходять на п'єзоелектричні регулятори 9 тиска регуляторів 8 осьового положення вала. Вимикачі 36 служать для відключення підсилювачів 34 і 35 від регуляторів 8 при настроюванні пристрою. Регулятори 8 осьвого положення вала, а також елементи 19÷35 пристрою утворюють систему автоматичного управління осьовим положенням площини планшайби. Аналогово-цифрові перетворювачі 37 і 38 забезпечують перетворення напруг на першому і другому виходах диференціального підсилювача 32, відповідно, в цифрові двійкові коди, а вимикачі 39 служать для їх відключення від диференціального підсилювача 32 при настроюванні пристрою. Ідентифікатор 40 нульового кута поворота вала 1 забезпечує запуск перетворювачів 37 і 38 при повороті вала 1 на кут плворота, наприклад j = 0 . В якості ідентифікатора 40 може використовуватися тахометр електронно-лічильний (АН УРСР, паспорт МОИС 801.0.0.0.00. ПС, 1985р.), який забезпечує формування сигналів нульового кута поворота. На кресленнях також позначені: 41- станина; 42- пристрій для лінійного переміщення різцевої голівки; 43 -різцева голівка; 44 п'єзоелектричний двигун; 45 - пристрій переміщення різця по разрахунковій траєкторії; 46 - аеростатична напрямна; 47 - пристрій стабілізації положення рухомого елемента аеростатичної напрямної; 48-пристрій стабілізації радіального положення осі обертання вала опори і положення площини планшайби; 49 стояки; 50- віброкомпенсуючі опори. Причому, датчик 19 величини регуліруємого зазора з'єднаний з входом вимірювача 27 величини регуліруємого зазора, а його вихід з'єднаний з входом обчислювача 30 і з входом електронного ключа 33, датчик 22 величини контрольного зазора з'єднаний з вимірювачем 28 величини . контрольного зазора його вихід з'єднаний з входом обчислювача 30, датчик 24 величини зазора корекції з'єднаний з вимірювачем 29 величини зазора корекції, а його вихід з'єднаний з входом входом обчислювача 30, виходи обчислювача 30 з'єднані з входом інтегрируючого ланцюжка 31, з входом електронного ключа 33, з входами аналого-цифрового перетворювача 37, з входами аналогове -цифрового перетворювача 38, вихід інтегрируючого ланцюжка 31 з’єднаний з першим входом диференціальногг підсилювача 32, а вихід електронного ключа 33 з'єднаний з його другим входом, перший вихід диференціального підсилювача 32 через вимикач 39 з'єднаний з входом аналого-цифрового перетворювача 37 і з входом підсилювача 35, а його вихід через перемикач 36 з'єднаний з п'єзоелектричними двигунами 10 регулятора 8 осьового положення вала, а другий вихід диференціального підсилювача 32 через вимикач 39 з'єднаний з входом аналого-цифрового перетворювача 38 і з входом підсилювача 34, а його вихід через вимикач 36 з'єднаний з п'єзоелектричними двигунами 10 регулятора 8 осьового положення вала, виходи аналого-цифрового перетворювача 37 і виходи аналого-цифрового перетворювача 38 з'єднані з входами обчислювача 30, вихід ідентифікатора 40 нульового положення вала з'єднаний з входом аналого-цифрового перетворювача 37 і з входом аналого-цифрового перетворювача 38. Спосіб вимірювання осьової складової сили різання на аеростатичну шпиндельну опору включає наступну послідовність дій. 1. Будують функціональну залежність Po .c. = f (Uупр . 1) між величиною осьовї складової Po .c. сили різання і складовою Uупр . управляючої напруги DUупр . , яка дорівнює відхиленню вимірюємої напруги від опорної напруги (на виходах диференціального підсилювача 32), причому, складова напруга Uупр.1. забезпечує усунення зміщення вала 1 аеростатичної шпиндельної опори 26 регуляторами осьового положення вала цієї опори під дією осьової складової сили різання. Для побудови цієї функціональної залежності подають тиск піддува (Фіг. 2) в радіальну аеростатичну опору 17, осьову аеростатичну опору 2 і в регулятори 8 осьового положення вала. Вал 1 аеростатичної шпиндельної опори 26 установлюють на кут поворота, наприклад j = 0 . Вимикачами 36 підсилювачі 34 і 35 підключають до регуляторів 8, а вимикачами 39 аналого-цифрові перетворювачі 37 і 38 підключають до першого і другого виходів диференціального підсилювача 32. Вмикають пристрій і виконують пуск підпрограми обчислювача 30 "Опорна напруга". В результаті вихідна напруга вимірювача 27 величини регуліруємого зазора, яка відповідає величині регуліруємого зазора 18 в момент часу пуска цієї підпрограми, перетворюється в цифровий двійковий код і запам'ятовується в пам'яті обчислювача 30, а також ця напруга з обчислювача 30 через інтегрируючій ланцюжок 31 постійно надходить на перший вхід диференціального підсилювача 32 в якості опорної (задаючої) напруги Uon(0). Одночасно сигналом обчислювача 30 відкривається електронний ключ 33. Вихідна напруга вимірювача 27 величини регуліруємого зазора в якості вимірюємої величини через ключ 33 надходить на другий вхід диференціального а підсилювача 32. Напруги на першому і другому входах ди ференціального підсилювача 32 рівні. Отже рівні напруги на його виходах, які через пісилювачі 34 і 35 надходять на регулятори 8 осьового положення вала. Вал 1 (планшайба 21) буде займати початкове незбурене положення. Функціональну залежність Po.c. = f (Uупр .1 ) побудуємо, наприклад, для таких десяти значень Po.c. з дискретністю 3 кГ: 3кГ, 6кГ, 9кГ,... 30кГ. До вала 1 аеростатичної шпиндельної опори 26 по напрямку дії Рдс прикладають зусилля 3кГ і виконують пуск підпрограми обчислювача 30 "Управляюча напруга Uупр.1". Під дією цього зусилля вал 1 опори 26, переборюючи піднімальну силу осьової аеростатичної опори 26, починає зміщуватися в напрямку датчика 19 величини регуліруємого зазора. Зазор 18 починає зменшуватися. В результаті зменшується напруга /позитивна/ на другому вході диференціального підсилювача 34 і надходить на регулятор 8 осьового положення вала, установлений в перерізі по Б-Б опори 26 (фіг. 3). П'єзоелектричні двигуни 10 регулятора 8 виводять голки 11 з підводящих каналів газа цього регулятора 8 і збільшують площі їх поперечних перерізів. Піднімальна сила регулятора 8 в перерізі по Б-Б опори 26 збільшується, а піднімальна сила регулятора 8 в перерізі по А-А залишається незмінною. Під діянням різності піднімальних сил ци х регуляторів 8 вал 1 після незначного мікрозміщення займе нове положення, при якому осьове навантаження буде урівноважене різністю піднімальних сил регуляторів 8 і піднімальною силою осьової аеростатичної опори 2, що виникає при зміщенні вала 1. При сталій жорстокості W осьової аеростатичної опори 2 різність потенціалів між виходами диференціального підсилювача 32 буде однозначно відповідати величині осьового навантаження. Відзначимо, що при зміщені вала 1 в сторону датчика 19 величини регуліруємого зазора напруга на другому виході ди ференціального підсилювача 32 завжди більше напруги на його першому ви ході. У відповідності з алгоритмом підпрограми "Управляюча напруга Uупр.1 обчислювач 30 "N" разів видає сигнали запуска на аналого-цифрові перетворювачі 37 і 38. По сигналам готовності, які надходять в обчислювач 30 з цих перетвлрювачів, обчислювач 30 видає на них сигнали опитування. Двійкові цифрові коди напруг Uвих.1 і Uвих.2 на першому і другому виходах ди ференціального підсилювача 32 надходять в обчислювач 30. Обчислюються різності: 1) U(упр . 1(1) = Uвих . 2 (1) - Uвих .1 (1);...; 1) U(упр . 1(n) = Uвих. 2 (n) - Uвих .1 (n);...; (6) 1) U(упр . 1(N) = Uвих .2 (N) - Uвих .1 (N). І обчислюється асимптотично незміщена оцінка Uупр.1 величини управляючої напруги при осьовому навантаженні, що дорівнює 3кГ: L ( 1) N ( 1) Uупр .1 = å U упр .1 (n) / N (7) n =1 Послідовно отримують оцінки управляючих напруг Uупр1. i, Uупр1...., U упр1. для осьових навантажень 6 кГ, 9кГ,..., 30кГ. При цьому вал опори залишається на куту поворота j = 0 , а для включення впливу осьової температурної деформації вала 1 на результати вимірювань отримання кожної наступної "n"-ої оцінки починають з запуска підпрограми "Опорна напруга". Результати обчислень складають таблицю 1: Таблиця 1 3кГ Po .c. 6кГ 9кГ ... 30кГ ... L ( 1) L (2 ) L (3 ) L ( 10 ) Uупр .1 Uупр .1 Uупр .1 Uупр .1 Інформацію, що складає таблицю 1, апроксимують, наприклад, ортогональним поліномом Чебишева "n" - го ступеня і отримують функціональну залежність /І/. Для цього виконують пуск підпрограми L Uупр .1 обчислювача 30 "Функціональна залежність Po .c. = f (Uупр . 1) ". Розраховують коефіцієнти а 0, а1, а2, an ортогонального полінома Чебишева: L L L Po .c. = a0 + a1 Uупр .1 + a2 Uупр .1 + ...an Uупр .1 (8) 2. Будують функціональну залежність DUon = f ( DL ) між величиною DL осьового зміщення вала 1 аеростатичної шпиндельної опори 26 відносно його початкового положення для компенсації осьової температурної деформації вала 1 і приростом DUon величини початкового значення опорної (задаючої) напруги на вході (першому у данному випадку) диференціального підсилювача 32, яка відповідає початковому /незміщенному/ положенню валаї опори 26. Для побудови цієї функціональної залежності кутове положення вала 1, наприклад, j = 0 не змінюють. Подають тиск піддува на осьову аеростатичну опору 2, радіальну аеростатичну опору 17 і на регулятори 8 осьового положення вала. Виконують пуск підпрограми обчислювача 30 "Опорна напруга" (див. п.1). При рівних піднімальних силах регуляторів 8 вал 1 (планшайби 21) опори 26 займе початкове (незбурене) положення. Вихідна напруга вимірювача 27 величини регуліруємого зазора запам’ятовується в обчислювачі 30 в якості опорної (задаючої) напруги Uon(0). Припустимо, що максимальна величина зміщення вала 1 для компенсації його осьової температурної деформації не перевищує 5мкм. Функціональну залежність DUon = j( DL ) побудуємо, наприклад, по десяти значенням величини DL зміщення вала 1:05 мкм, 1 мкм, 1,5 мкм, ....5 мкм. На другому етапі побудови цієї функціональної залежності виконують пуск підпрограми обчислювача 30 "Установка вала 1". Обчислювач 30 по відомій функціональній залежності Z = f (Uвих.вим ) між величиною зазора Z, що вимірюється, і вихідною напругою ивих.вим- вимірювача 27 величини регуліруємого зазора розраховує величину Z18(0) початкового значення регуліруємого зазора 18, який відповідає опорній напрузі Uon(0), яка надходить з вимірювача 27, і відображає його на екрані дисплея разом з цифровим двійковим кодом Uon(0). Зміщують вал 1 до датчика 19 величини регуліруємого зазора на 0,5 мкм, для чого величину регуліруємого зазора установлюють рівною (Z18(0) - 0,5)мкм. Для цього в обчислювач 30 уводять код Uon < Uon(0). По сигналу "Увод" обчислювач 30 установлює на першому вході диференціального підсилювача 32 уведене значення опорної напруги. Так як Uon < Uon(O) піднімальна сила регулятора 8 в перерізі по А - А опори 26 збільшується і залишається незмінною. Вал 1 зміщується в напрямку датчика 19. Регуліруємий зазор зменшується. Напруга на другому вході диференціального підсилювача 32, що надходить через ключ 33 з вимірювача 27 величини регуліруємого зазора зменшується, а отже, збільшується піднімальна сила регулятора 8 в перерізі по Б-Б опори 26. В момент часу, коли піднімальна сила регулятора 8 в перерізі по А-А стане рівною сумі піднімальної сили регулятора 8 в перерізі по Б-Б і піднімальної сили осьової аеростатичної опори 2, вал 1 займе нове положення. Обчислювач 30 перетворює вихідну напругу вимірювача 27 в цифровий код і по функціональній залежності Z = (Uвих.вим.) розраховує величину Z 18 регуліруємого зазора 18 і відображає її на екрані дисплея. Якщо Z18 ¹ Z18 (0) - 0,5 мкм, методом послідовних наближень, змінюючи Uon, досягають виконання рівності Z18 = Z18 (0) - 0,5 мкм. Розраховується величина (1) DUon = Uon(0) - Uon приросту опорної напруги, що відповідає зміщенню вала 1 на 0,5 мкм. (2 ) (3 ) ( 10 ) Послідовно отримують величини приростів опорної напруги - DU on , - DU on , ... - DU on для осьових зміщень вала 1 DL = 1 мкм , 1,5 мкм, ...,5 мкм. Результати обчислень складають таблицю 2: 0,5 мкм 1 мкм 1,5 мкм ... 5 мкм DL (мкм) (2 ) (1) (3 ) ... ( 10 ) - DUon(В ) - DU on - DU on - DU on - DU on Інформацію, що складає таблиця 2, апроксимірують ортогональним поліномом Чебишєва "n"-го ступеня і отримують функціональну залежність - DUon = f ( DL ) . Для цього виконують пуск підпрограми обчислювача 30 "Функціональна залежність DUon = f ( DL ) . Розраховується коефіцієнти C0, С1, С2...., Сn ортогонального полінома Чебишєва: - DUon = С0 + С1 × D L + С 2 × DL2 + ...С n × DLn (9). По цій же схемі будують функціональну залежність DUon = d0 + d1L + d 2L2 + ... + dnLn (9’) між величиною приросту опорної напруги + DUon і величиною зміщення вала 1 опори від датчика регуліруємого зазора на величину його осьової температурної деформації L. 3. Будують функціональну залежність DU упр . 2 = f ( DL ) між складовою Uупр.2 управляючої напруги DUупр . , яка дорівнює відхиленню вимірюємої напруги від опорної напруги (на виходах диференціального підсилювача 32 або на виходах підсилювачів 34 і 35), причому, складова напруга U упр.2 забезпечує компенсацію осьової температурної деформації вала 1 опори 26 регуляторами 8 осьового положення вала, і величиною DL осьової температурної деформації вала 1. При побудові цієї функціональної залежності вал 1 залишається на куту поворота j = 0 . Виконують пуск підпрограми "Опорна напруга" (див. п. 1). Вал 1 аеростатичної шпиндельної опори 26 займе початкове незбурене положення. Опорна напруга Uon(0) запам'ятовується. По принятому припущенню осьова температурна деформація вала 1 не перевищує 5 мкм. Функціональну залежність U упр .2 = f (Dl ) побудуємо для десяти значень DL на інтервалі значень (0÷5)мкм з дискретністю 0.5 мкм: 0.5 мкм, 1 мкм, 1,5 мкм, ..., 5 мкм.. В пам'ять обчисювача 30 уводять перше дискретне значення DL = 0.5 мкм і виконують пуск підпрограми "Управляюча напруга Uупр.2". Ви хідна напруга вимірювача 27 величини регуліруємого зазора, що відповідає початковій величині регуліруємого зазора 18 в момент часу пуска цієї підпрограми, перетворюється в цифровий двійковій код Z18(0) величини регуліруємого зазора і запам'ятовається в пам'яті обчислювача 30 в якості початкового значення величини цього зазора 18. По функціональній залежності 191 обчислюється приріст - DUon опорної (задаючої) напруги на першому вході диференціального підсилювача 32, який забезпечує зміщення вала 1 відносно початкового положення на 0,5 мкм і розраховується величина опорної напруги Uon(1): DUon(1) = DUon(0 ) - DUon (10). З обчислювача 30 Uon (1) через інтегрируючій ланцюжок 31 в якості опорної напруги постійно надходить на перший вхід диференціального підсилювача 32. Одночасно сигналом обчислювача 30 відкривається електричний ключ 33. Вихідна напруга вимірювача 27 величини регуліруємого зазора, яка відповідає початковій величині Z18(0) регулір уємого зазора 18, надходить на другий вхід ди ференціального підсилювача 32. Так як Uon(1)
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring an axial cutting force acting on the spindle support with an aerostatic bearing
Автори англійськоюTarasov Viktor Oleksiiovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюСпособ измерения осевой составляющей усилия резания, действующей на опору шпинедля с аэеростатичским подшипником
Автори російськоюТарасов Виктор Алексеевич, Зиненко Владимир Николаевич
МПК / Мітки
МПК: G01N 27/00, G01L 9/04
Мітки: сили, аеростатичну, складової, спосіб, вимірювання, осьової, різання, опору, шпиндельну
Код посилання
<a href="https://ua.patents.su/12-70557-sposib-vimiryuvannya-osovo-skladovo-sili-rizannya-na-aerostatichnu-shpindelnu-oporu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання осьової складової сили різання на аеростатичну шпиндельну опору</a>
Спосіб вимірювання сили опору гасителя коливань при ходових іспитах залізничного транспортного засобу
Номер патенту: 68038
Опубліковано: 15.07.2004
Автори: Гундарь Володимир Петрович, Басов Геннадій Григорійович, Бурка Михайло Леонтійович, Параніч Олександр Олександрович
МПК: B61F 9/00
Мітки: іспитах, спосіб, вимірювання, ходових, транспортного, засобу, опору, сили, залізничного, гасителя, коливань
Формула / Реферат:
Спосіб вимірювання сили опору гасителя коливань при ходових іспитах залізничного транспортного засобу, при якому підготовлюють елемент гасителя для наклейки тензодатчиків, наклеюють тензодатчики на підготовлений елемент, комутують схему наклеєних тензодатчиків, при цьому зусилля, що розвиваються гасителем, визначають шляхом реєстрації напруг розтягу-стиску елемента гасителя з наклеєними тензодатчиками, який відрізняється тим, що як елемент...
Спосіб визначення сили різання та параметрів зрізів при зубофрезуванні в умовах обкочування
Номер патенту: 30961
Опубліковано: 15.12.2000
Автор: Грицай Ігор Євгенович
МПК: B23F 5/00
Мітки: параметрів, обкочування, різання, визначення, сили, умовах, спосіб, зрізів, зубофрезуванні
Текст:
...6 встановлений хомут 8. Інстр умент, що імітує роботу черв'ячної фрези - дисковий різець 9 з напаяним на нього робочим елементом (зубцем) 10, що в осьовій площині має профіль зубця черв'ячної фрези. Різець 9 встановлено на інструментальну оправку 11 горизонтально-фрезерного верстата, а сигнал з тензодатчиків (на фіг. не показані) знімається за допомогою струмознімних кілець 12. На початку роботи необхідно сцентрувати заготовку з...
Спосіб визначення напружень у трубопроводах на підставі вимірювання коерцитивної сили
Номер патенту: 40064
Опубліковано: 16.07.2001
Автор: Ігумєнцев Євген Олександрович
МПК: G01L 1/00
Мітки: спосіб, вимірювання, визначення, сили, напружень, коерцитивної, підставі, трубопроводах
Формула / Реферат:
Спосіб визначення напружень в трубопроводах на підставі вимірювання коерцитивної сили, який полягає в тому, що для вимірювання напружень у виробі обирають величину коерцитивної сили Нс пов'язану з пластичною деформацією в розвантаженому стані виробу для зменшення впливу умов випробувань на магнітні властивості та залишкову деформацію і за результатами контролю величини коерцитивної сили прогнозують залишковий ресурс виробу, який відрізняється...
Спосіб зниження сили опору в опорі ковзання
Номер патенту: 21188
Опубліковано: 04.11.1997
Автори: Белоус Олена Іванівна, Колосов Леонід Вікторович, Бельмас Іван Васильович, Танцура Анна Іванівна
МПК: B65G 39/00
Мітки: опори, опору, зниження, спосіб, ковзання, сили
Формула / Реферат:
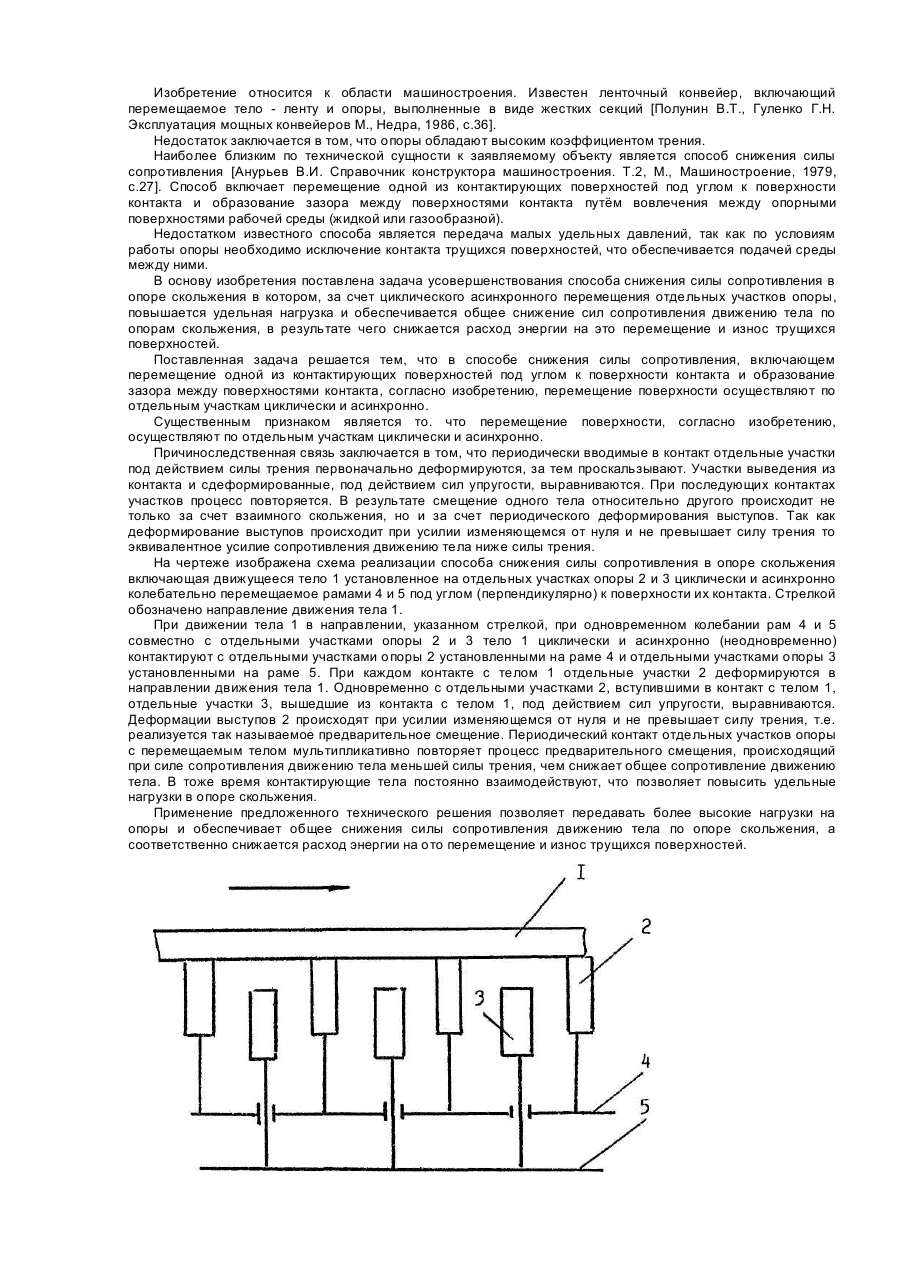
Способ снижения силы сопротивления в опоре скольжения, включающей перемещение одной из контактирующих поверхностей под углом к поверхности контакта и образование зазора между поверхностями контакта, отличающийся тем, что перемещение поверхности осуществляют по отдельным участкам циклически и асинхронно.
Спосіб оптичного вимірювання величини прискорення сили тяжіння
Номер патенту: 33397
Опубліковано: 15.02.2001
Автори: Бурачек Всеволод Германович, Гніденко Микола Володимирович
МПК: G01N 13/10, G01N 13/00
Мітки: оптичного, тяжіння, вимірювання, сили, прискорення, величини, спосіб
Текст:
...ge = 1/12G * ке, звідки ке = & * і2е; (7) Де ge - прискорення сили тяжіння на пункті з відомим значенням величини прискорення сили тяжіння; і 1е - відстань між елементами смуги поглинання на пункті з відомим значенням величини прискорення сили тяжіння. На робочому пункті визначають величину прискорення сили тяжіння за формулою: gp=l/l P 2 * k c , Де gp - прискорення сили тяжіння на робочому пункті ; 1 Р - відстань між елементами...
Попередній патент: Спосіб отримання гранульованого мінерального добрива
Наступний патент: Дентальний імплантат
Випадковий патент: Спосіб зниження залишкових напружень у зварних з'єднаннях сталевих труб