Спосіб розпізнавання зображень
Номер патенту: 85556
Опубліковано: 25.11.2013

Формула / Реферат
Спосіб розпізнавання зображень, який включає перетворення зображення в послідовність сигналів, проектують зображення кожної фігури на фоточутливий елемент, виділяють вершини кожної фігури і визначають відстані між сусідніми вершинами, визначають периметр фігури, формують вектор ознак, до якого входять величини периметра, кількості вершин та величин відстаней між сусідніми вершинами, зображення фігури проектують на клітинний автомат, виділяють контур зображення, з крайньої клітини якого формують сигнал збудження, який передається сусіднім клітинам і розповсюджується по всьому полю клітинного автомата, згідно з вибраною околицею, в момент надходження сигналу збудження до найближчої клітини, що належить контуру зображення, формують сигнал обнуління збуджених клітин, що не належать контуру зображення, здійснюють передачу сигналу збудження від збудженої клітини, що належить контуру зображення, до сусідніх клітин, що належать контуру зображення в одному з напрямків від початкової збудженої клітини, що належить контуру зображення, формують одиничний імпульс на виході клітинного автомата, при зміні напрямку розповсюдження сигналу збудження, інакше імпульс не формується, обходять сигналом збудження усі клітини контуру та формують відповідну послідовність, видаляють імпульси, які мають амплітуди, менші заданої порогової амплітуди, по отриманій послідовності визначають форму фігури, згідно з якою величини амплітуд указують на вершину та величину кута в ній, а по часу між імпульсами визначають відстані між сусідніми вершинами, перетворюють імпульсну послідовність у послідовність чисел, яку порівнюють з послідовностями, що зберігаються у пам'яті як еталонні, якщо відбулося співпадіння з еталонною послідовністю, то фігуру вважають розпізнаною, а якщо співпадіння не відбулося, то здійснюють зсув вхідної послідовності в одному з напрямків і отриману послідовність порівнюють з еталонними послідовностями чисел, зсув вхідної послідовності здійснюють циклічно до співпадіння з еталонною послідовністю, якщо після повного циклічного зсуву співпадіння не відбулося, то вхідну послідовність записують у пам'ять, по кількості зсувів до співпадіння визначають орієнтацію фігури, який відрізняється тим, що видаляють шуми на зображенні, бінаризують зображення, виділяють об'єкти зображення та виділяють контури усіх виділених об'єктів зображення, формують імпульсні послідовності, що описують кожний об'єкт, виділяють перший об'єкт, який складається з найбільшої кількості клітин, що формують його контур, виділяють другий об'єкт, який складається з клітин, що формують його контур, кількість яких менше кількості клітин, що формують контур першого виділеного об'єкта, і більше кількості клітин, що формують інші виділені об'єкти зображення, обчислюють відстань між першим та другим виділеними об'єктами, виділяють третій об'єкт, який складається з клітин, що формують його контур, кількість яких менше кількості клітин, що формують контур другого виділеного об'єкта, і більше кількості клітин, що формують інші виділені об'єкти зображення, обчислюють відстань між першим та третім виділеним об'єктом, аналогічно послідовно виділяють усі інші об'єкти згідно з кількістю клітин, що формують їх контури, та обчислюють відстані між кожним з них та першим виділеним об'єктом зображення, при наявності однакових об'єктів по кількості клітин, першим з них розташовують той об'єкт, відстань якого менша до першого виділеного об'єкта зображення, якщо об'єкти мають однакову кількість клітин та рівні відстані до першого виділеного об'єкта, та першим вибирають той об'єкт, який перший розташовується по прямому руху годинникової стрілки кола з центром на першому виділеному об'єкті, формують імпульсну послідовність, яка складається з груп імпульсних послідовностей, кожна група з яких описує окремий виділений об'єкт, розташовують групи імпульсних послідовностей в порядку виділення об'єктів зображення, задають часові інтервали між кожною групою імпульсних послідовностей, які відповідають величині відстані між першим виділеним об'єктом, та виділеним об'єктом, що описаний заданою групою імпульсної послідовності, формують перший імпульс у кожній групі імпульсної послідовності, величина амплітуди якого відповідає напрямку розташування об'єкта відносно першого виділеного об'єкта, проводять порогову обробку сформованої імпульсної послідовності, видаляють ті групи імпульсних послідовностей, які менше заданих порогових величин по тривалості та по величині амплітуди, видаляють часові інтервали, що сформовані перед ними, перетворюють імпульсну послідовність у послідовність чисел, яку порівнюють з еталонною послідовністю, якщо відбулося співпадіння, то вважають, що фігура розпізнана, а якщо співпадіння не відбулося, то здійснюють циклічний зсув послідовності і на кожному такті зсуву здійснюють порівняння з еталонною послідовністю, якщо співпадіння не відбулося, то формують новий еталон.
Текст
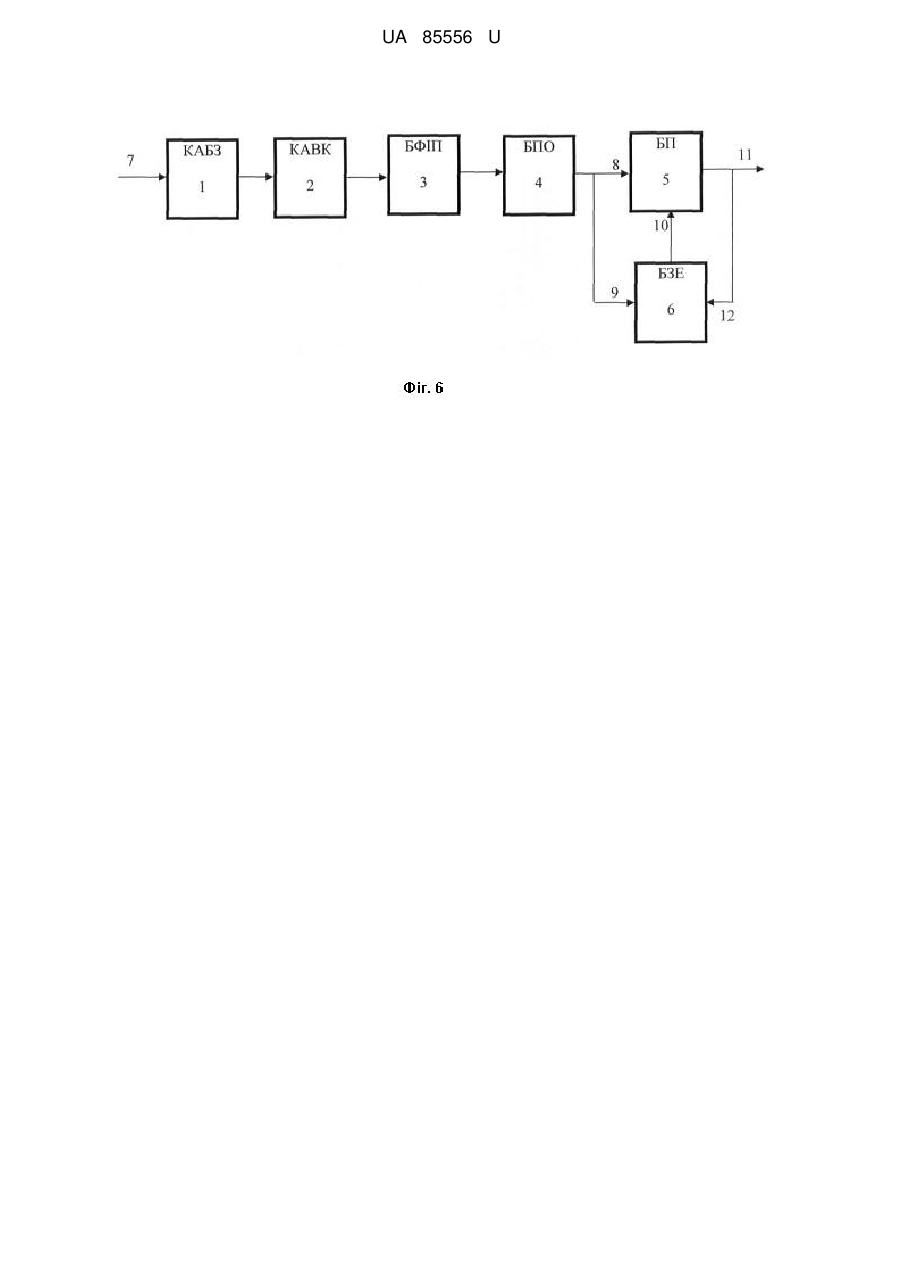
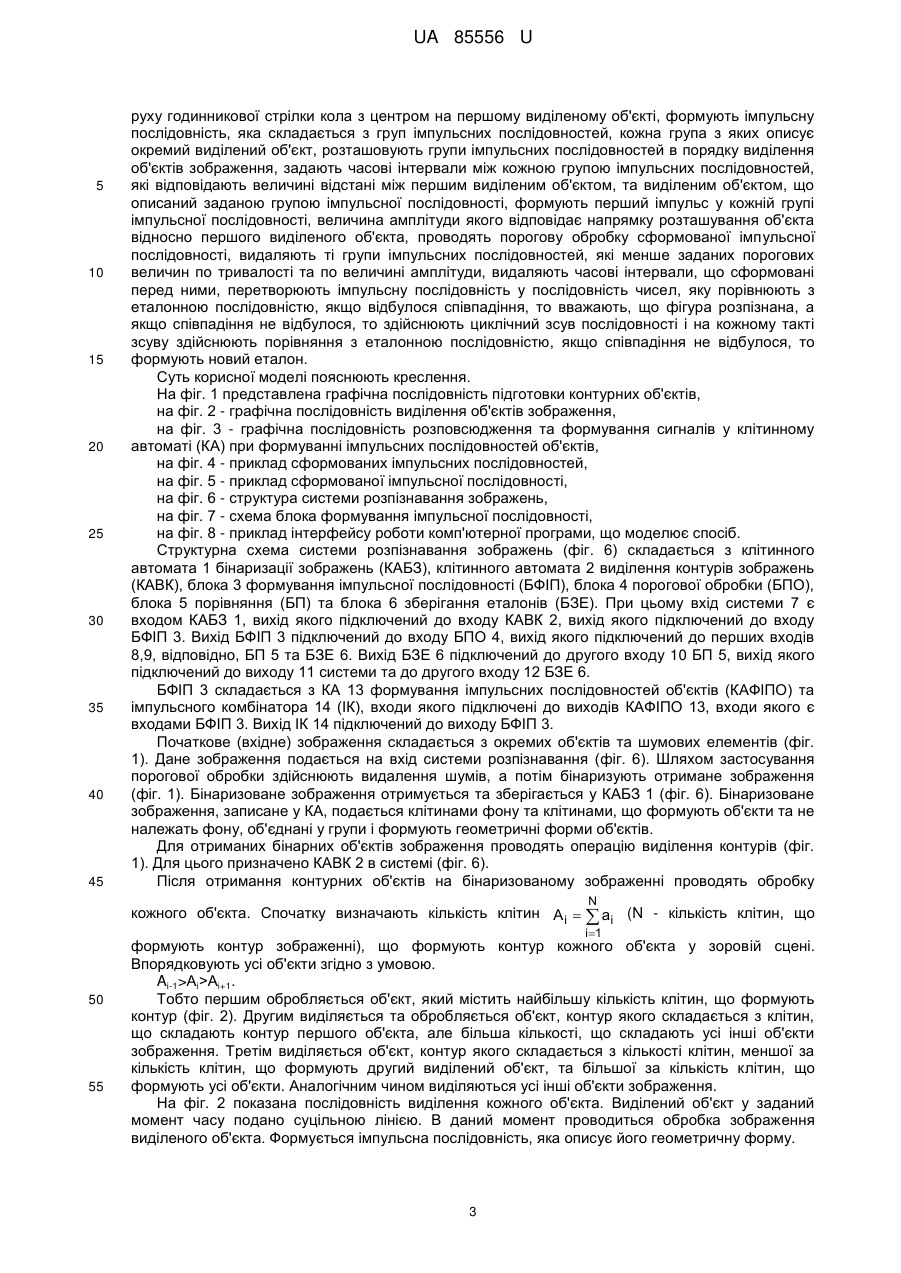
Реферат: UA 85556 U UA 85556 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до автоматики та обчислювальної техніки і може знайти використання при розпізнаванні плоских фігур в робототехніці, в системах технічного зору, при аналізі препаратів і рентгенограм і т.п. Відомо спосіб розпізнавання зображень з окопроцесорним виділенням визначників (Патент України на винахід № 52616, G06K9/00, Бюл. № 1, 2003 p.), який полягає у використанні паралельного накопичення (додавання) одночасно всієї інформації, що надходить, та паралельного виділення загальних частин, незалежно від типу інформації всі сигнали перетворюють на логіко-часові функції та виділяють одразу декілька загальних частин, які обробляють за допомогою певного ієрархічного додавання, згідно з ієрархічною побудовою блока синтезатора - генератора визначників, вводять якісні визначники зображень, кожен з яких діє на вихідну функцію за допомогою оператора впливу, який являє собою певну функціональну залежність, за якою він діє на функції виходу, після закінчення обробки утворюється цільовий кодер, його вихід постійно аналізують та порівнюють з раніше відомими та записаними в пам'яті у вигляді логіко-часових функцій еталонними зразками бази знань, за допомогою яких виконують кінцеве розпізнавання зображень, у випадку відсутності відповідного еталонного зразка, отриманий результат, після експериментальної ідентифікації, записують як новий еталон та представляють як раніше невідому еталонну логіко-часову функцію для інтерактивного уточнення, потім визначають найбільш близький еталон згідно з операцією порівняння. Недоліком даного способу є низька швидкодія, яка залежить від витрат часу на ієрархічне додавання, синтез-генерацію сигналів та аналіз логіко-часових функцій. Спосіб має низьку надійність та достовірність функціонування за рахунок використання великих об'ємів апаратури та високих вимог до генерації та формування імпульсних послідовностей у часі, що впливає на результат паралельно ієрархічного додавання по часу та амплітуді. Крім того, спосіб має вузьку область застосування за рахунок неможливості розпізнавання складних об'єктів. Відомо спосіб розпізнавання плоских геометричних фігур (Патент України № 51190А. Опубл. 2002 - Бюл. № 11), що полягає у перетворенні зображення фігури в набір сигналів, проектують зображення фігури на фоточутливий елемент, виділяють вершини фігури і визначають відстані між сусідніми вершинами, визначають площу та периметр фігури шляхом підрахунку точок, що належать контуру та площині зображення фігури, формують вектор ознак, до якого входять величини площини, периметра, кількості вершин та величин відстаней між сусідніми вершинами, порівнюють значення отриманого вектора із значеннями еталонних векторів, за ступенем співпадання векторів визначають фігуру, що розпізнають. Недоліком даного способу є низька швидкодія, в зв'язку з витрачанням великої кількості часу на визначення та формування вектора ознак, а також необхідність витрат часу на порівняння векторів з великою кількістю ознак. Недоліком способу є низька інформативність за рахунок використання великої кількості ознак, що описують зображення. Крім того, спосіб має вузьку область застосування за рахунок неможливості розпізнавання складних об'єктів. Найбільш близьким за змістом є спосіб розпізнавання плоских геометричних фігур (Патент України № 61795, Опубл. 2011 - Бюл. № 14), який полягає в тому, що перетворюють зображення в послідовність сигналів, проектують зображення фігури на фоточутливий елемент, виділяють вершини фігури і визначають відстані між сусідніми вершинами, визначають периметр фігури, формують вектор ознак, до якого входять величини периметра, кількості вершин та величин відстаней між сусідніми вершинами, порівнюють значення отриманого вектора із значеннями еталонних векторів, за ступенем співпадіння векторів визначають фігуру, що розпізнають, зображення фігури проектують на клітинний автомат, виділяють контур зображення, з крайньої клітини якого формують сигнал збудження, який передається сусіднім клітинам і розповсюджується по всьому полю клітинного автомата, згідно з вибраною околицею, в момент надходження сигналу збудження до найближчої клітини, що належать контуру, формують сигнал обнуління збуджених клітин, що не належать контуру зображення, здійснюють передачу сигналу збудження від збудженої клітини, що належить контуру зображення, до сусідніх клітин, що належать контуру зображення в одному з напрямківвід початкової збудженої клітини, що належить контуру зображення, під час передачі сигналу збудження до сусідньої клітини, що належить контуру зображення, формують одиничний імпульс на виході клітинного автомата, при зміні напрямку розповсюдження сигналу збудження, інакше імпульс не формується, обходять сигналом збудження усі клітини контуру та формують відповідну послідовність, видаляють імпульси, які мають амплітуди менші заданої порогової амплітуди, по отриманій послідовності імпульсів визначають форму фігури, згідно якої величини амплітуд указують на вершину та величину кута в ній, а по часу між імпульсами визначають відстані між сусідніми вершинами, перетворюють імпульсну послідовність у послідовність чисел, яку 1 UA 85556 U 5 10 15 20 25 30 35 40 45 50 55 60 порівнюють з послідовністю чисел, що зберігаються у пам'яті як еталонні, якщо відбулося співпадання з еталонною послідовністю, то фігура розпізнана, а якщо співпадіння не відбулося, то здійснюють зсув вхідної послідовності в одному з напрямків і отриману послідовність порівнюють з еталонними послідовностями чисел, зсув вхідної послідовності здійснюють циклічно до співпадання з еталонною послідовністю, якщо після повного циклічного зсуву співпадіння не відбулося, то вхідну послідовність записують у пам'ять, по кількості зсувів до співпадіння визначають орієнтацію фігури. Недоліком даного способу є низька інформативність за рахунок того, що ввігнуті вершини подаються також амплітудами імпульсів позитивної полярності, а також спосіб має вузьку область застосування за рахунок неможливості розпізнавання складних об'єктів. В основу корисної моделі поставлена задача створення способу для розпізнавання плоских фігур, який дозволяє підвищити інформативність та розширити область застосування. Це досягається за рахунок визначення усіх окремих об'єктів на зображенні, розташуванні їх у порядку, в залежності від кількості клітин, що формують їх контур, визначення відстаней між першим виділеним об'єктом та іншими об'єктами зображення, а також їх місця розташування. Для вирішення поставленої задачі формують імпульсні послідовності окремих виділених об'єктів зображення та об'єднують їх в одну імпульсну послідовність, яка описує усе зображення повністю. Отриману імпульсну послідовність порівнюють з еталонною та приймають рішення про зображення. Поставлена задача вирішується тим, що згідно зі способом розпізнавання зображень, перетворюють зображення в послідовність сигналів, проектують зображення кожної фігури на фоточутливий елемент, виділяють вершини кожної фігури і визначають відстані між сусідніми вершинами, визначають периметр фігури, формують вектор ознак, до якого входять величини периметра, кількості вершин та величин відстаней між сусідніми вершинами, зображення фігури проектують на клітинний автомат, виділяють контур зображення, з крайньої клітини якого формують сигнал збудження, який передається сусіднім клітинам і розповсюджується по всьому полю клітинного автомата, згідно з вибраною околицею, в момент надходження сигналу збудження до найближчої клітини, що належить контуру зображення, формують сигнал обнуління збуджених клітин, що не належать контуру зображення, здійснюють передачу сигналу збудження від збудженої клітини, що належить контуру зображення, до сусідніх клітин, що належать контуру зображення в одному з напрямків від початкової збудженої клітини, що належить контуру зображення, формують одиничний імпульс на виході клітинного автомата, при зміні напрямку розповсюдження сигналу збудження, інакше імпульс не формується, обходять сигналом збудження усі клітини контуру та формують відповідну послідовність, видаляють імпульси, які мають амплітуди, менші заданої порогової амплітуди, по отриманій послідовності визначають форму фігури, згідно з якою величини амплітуд указують на вершину та величину кута в ній, а по часу між імпульсами визначають відстані між сусідніми вершинами, перетворюють імпульсну послідовність у послідовність чисел, яку порівнюють з послідовностями, що зберігаються у пам'яті як еталонні, якщо відбулося співпадіння з еталонною послідовністю, то фігуру вважають розпізнаною, а якщо співпадіння не відбулося, то здійснюють зсув вхідної послідовності в одному з напрямків і отриману послідовність порівнюють з еталонними послідовностями чисел, зсув вхідної послідовності здійснюють циклічно до співпадіння з еталонною послідовністю, якщо після повного циклічного зсуву співпадіння не відбулося, то вхідну послідовність записують у пам'ять, по кількості зсувів до співпадіння визначають орієнтацію фігури, видаляють шуми на зображенні, бінаризують зображення, виділяють об'єкти зображення та виділяють контури усіх виділених об'єктів зображення, формують імпульсні послідовності, що описують кожний об'єкт, виділяють перший об'єкт, який складається з найбільшої кількості клітин, що формують його контур, виділяють другий об'єкт, який складається з клітин, що формують його контур, кількість яких менше кількості клітин, що формують контур першого виділеного об'єкта, і більше кількості клітин, що формують інші виділені об'єкти зображення, обчислюють відстань між першим та другим виділеними об'єктами, виділяють третій об'єкт, який складається з клітин, що формують його контур, кількість яких менше кількості клітин, що формують контур другого виділеного об'єкта, і більше кількості клітин, що формують інші виділені об'єкти зображення, обчислюють відстань між першим та третім виділеним об'єктом, аналогічно послідовно виділяють усі інші об'єкти згідно з кількістю клітин, що формують їх контури, та обчислюють відстані між кожним з них та першим виділеним об'єктом зображення, при наявності однакових об'єктів по кількості клітин, першим з них розташовують той об'єкт, відстань якого менша до першого виділеного об'єкта зображення, якщо об'єкти мають однакову кількість клітин та рівні відстані до першого виділеного об'єкта, та першим вибирають той об'єкт, який перший розташовується по прямому 2 UA 85556 U 5 10 15 20 25 30 35 40 45 руху годинникової стрілки кола з центром на першому виділеному об'єкті, формують імпульсну послідовність, яка складається з груп імпульсних послідовностей, кожна група з яких описує окремий виділений об'єкт, розташовують групи імпульсних послідовностей в порядку виділення об'єктів зображення, задають часові інтервали між кожною групою імпульсних послідовностей, які відповідають величині відстані між першим виділеним об'єктом, та виділеним об'єктом, що описаний заданою групою імпульсної послідовності, формують перший імпульс у кожній групі імпульсної послідовності, величина амплітуди якого відповідає напрямку розташування об'єкта відносно першого виділеного об'єкта, проводять порогову обробку сформованої імпульсної послідовності, видаляють ті групи імпульсних послідовностей, які менше заданих порогових величин по тривалості та по величині амплітуди, видаляють часові інтервали, що сформовані перед ними, перетворюють імпульсну послідовність у послідовність чисел, яку порівнюють з еталонною послідовністю, якщо відбулося співпадіння, то вважають, що фігура розпізнана, а якщо співпадіння не відбулося, то здійснюють циклічний зсув послідовності і на кожному такті зсуву здійснюють порівняння з еталонною послідовністю, якщо співпадіння не відбулося, то формують новий еталон. Суть корисної моделі пояснюють креслення. На фіг. 1 представлена графічна послідовність підготовки контурних об'єктів, на фіг. 2 - графічна послідовність виділення об'єктів зображення, на фіг. 3 - графічна послідовність розповсюдження та формування сигналів у клітинному автоматі (КА) при формуванні імпульсних послідовностей об'єктів, на фіг. 4 - приклад сформованих імпульсних послідовностей, на фіг. 5 - приклад сформованої імпульсної послідовності, на фіг. 6 - структура системи розпізнавання зображень, на фіг. 7 - схема блока формування імпульсної послідовності, на фіг. 8 - приклад інтерфейсу роботи комп'ютерної програми, що моделює спосіб. Структурна схема системи розпізнавання зображень (фіг. 6) складається з клітинного автомата 1 бінаризації зображень (КАБЗ), клітинного автомата 2 виділення контурів зображень (КАВК), блока 3 формування імпульсної послідовності (БФІП), блока 4 порогової обробки (БПО), блока 5 порівняння (БП) та блока 6 зберігання еталонів (БЗЕ). При цьому вхід системи 7 є входом КАБЗ 1, вихід якого підключений до входу КАВК 2, вихід якого підключений до входу БФІП 3. Вихід БФІП 3 підключений до входу БПО 4, вихід якого підключений до перших входів 8,9, відповідно, БП 5 та БЗЕ 6. Вихід БЗЕ 6 підключений до другого входу 10 БП 5, вихід якого підключений до виходу 11 системи та до другого входу 12 БЗЕ 6. БФІП 3 складається з КА 13 формування імпульсних послідовностей об'єктів (КАФІПО) та імпульсного комбінатора 14 (ІК), входи якого підключені до виходів КАФІПО 13, входи якого є входами БФІП 3. Вихід ІК 14 підключений до виходу БФІП 3. Початкове (вхідне) зображення складається з окремих об'єктів та шумових елементів (фіг. 1). Данезображення подається на вхід системи розпізнавання (фіг. 6). Шляхом застосування порогової обробки здійснюють видалення шумів, а потім бінаризують отримане зображення (фіг. 1). Бінаризоване зображення отримується та зберігається у КАБЗ 1 (фіг. 6). Бінаризоване зображення, записане у КА, подається клітинами фону та клітинами, що формують об'єкти та не належать фону, об'єднані у групи і формують геометричні форми об'єктів. Для отриманих бінарних об'єктів зображення проводять операцію виділення контурів (фіг. 1). Для цього призначено КАВК 2 в системі (фіг. 6). Після отримання контурних об'єктів на бінаризованому зображенні проводять обробку кожного об'єкта. Спочатку визначають кількість клітин A i 50 55 N ai i 1 (N - кількість клітин, що формують контур зображенні), що формують контур кожного об'єкта у зоровій сцені. Впорядковують усі об'єкти згідно з умовою. Aі-1>Аi>Аi+1. Тобто першим обробляється об'єкт, який містить найбільшу кількість клітин, що формують контур (фіг. 2). Другим виділяється та обробляється об'єкт, контур якого складається з клітин, що складають контур першого об'єкта, але більша кількості, що складають усі інші об'єкти зображення. Третім виділяється об'єкт, контур якого складається з кількості клітин, меншої за кількість клітин, що формують другий виділений об'єкт, та більшої за кількість клітин, що формують усі об'єкти. Аналогічним чином виділяються усі інші об'єкти зображення. На фіг. 2 показана послідовність виділення кожного об'єкта. Виділений об'єкт у заданий момент часу подано суцільною лінією. В даний момент проводиться обробка зображення виділеного об'єкта. Формується імпульсна послідовність, яка описує його геометричну форму. 3 UA 85556 U 5 10 15 20 25 30 35 40 45 50 55 60 Приклад формування імпульсних послідовностей для кожного об'єкта зображення подано на фіг. 3. Показана послідовність розповсюдження сигналу збудження по контурам виділених об'єктів та формуванні імпульсів у КАФІПО 13 (фіг. 7). На фіг. 3 імпульси, що формуються, мають різні амплітуди. Сформовані імпульсні послідовності для кожного об'єкта, що подані на фіг. 3, представлені на фіг. 4. На фіг. 5 подана загальна імпульсна послідовність, яка сформована з окремих імпульсних послідовностей (фіг. 4). Усі імпульсні послідовності для кожного об'єкта подаються на входи ІК 14 від КАФІПО 13. На виході ІК формується загальна імпульсна послідовність (фіг. 7), яка подається на вхід БПО 4 (фіг. 6). БПО 4 здійснює порогову обробку та видаляє імпульси, амплітуди яких менше заданого порогу. Крім того, видаляються об'єкти зображення, які складаються з клітин, кількість яких менша заданого порогу. Після порогової обробки отримують кінцеву імпульсну послідовність, яка порівнюється з еталонною у БП 5. Еталонні послідовності зберігаються у БЗЕ 6 у вигляді послідовностей чисел. Якщо еталонної послідовності не знайдено, то відповідний сигнал з виходу 11 подається на другий вхід 12 БЗЕ 6. Отримана послідовність з виходу БПО 4 подається на перший вхід 9 БЗЕ 6 і формується новий еталон. Якщо еталон знайдено, то на виході 11 системи формується сигнал про належність вхідного зображення до класу та ідентифікація його зсередини класу. Кінцева вихідна послідовність подана на фіг. 5 та фіг. 8. Послідовність розділена на окремі імпульсні послідовності, кожна з яких описує окремий об'єкт зображення. Паузи між даними послідовностями указують на відстань між першим виділеним об'єктом зображення та заданим, перед яким розташована задана пауза. Перший імпульс кожної окремої послідовності величиною амплітуди указує на орієнтацію даного об'єкта відносно першого виділеного об'єкта. Тобто указується сектор кола, в якому розташований даний об'єкт. Якщо існують об'єкти, які мають однакову кількість клітин, то першим виділяється той, до якого відстань від першого об'єкта менша. У випадку, якщо і відстані співпадають, першим виділяється той об'єкт, який першим розташований у напрямку, прямому руху годинникової стрілки. Кожний об'єкт подається як багатокутник. Позитивні імпульси послідовності указують на випуклі вершини багатокутника, а негативні - на увігнуті вершини. Пороговій обробці піддаються імпульси усіх полярностей. Приклад комп'ютерного моделювання способу подано на фіг. 8. На фіг. 8 представлено інтерфейс програми з виділеними контурними об'єктами, початкова імпульсна послідовність та послідовність, отримана після порогової обробки. Заявлений спосіб розпізнавання зображень дозволяє розширити його галузь застосування за рахунок того, що він дозволяє розпізнавати зображення, які складаються з множини об'єктів. Спосіб дозволяє розпізнавати складні зображення, які мають вільну орієнтацію та зміни у масштабі. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб розпізнавання зображень, який включає перетворення зображення в послідовність сигналів, проектують зображення кожної фігури на фоточутливий елемент, виділяють вершини кожної фігури і визначають відстані між сусідніми вершинами, визначають периметр фігури, формують вектор ознак, до якого входять величини периметра, кількості вершин та величин відстаней між сусідніми вершинами, зображення фігури проектують на клітинний автомат, виділяють контур зображення, з крайньої клітини якого формують сигнал збудження, який передається сусіднім клітинам і розповсюджується по всьому полю клітинного автомата, згідно з вибраною околицею, в момент надходження сигналу збудження до найближчої клітини, що належить контуру зображення, формують сигнал обнуління збуджених клітин, що не належать контуру зображення, здійснюють передачу сигналу збудження від збудженої клітини, що належить контуру зображення, до сусідніх клітин, що належать контуру зображення в одному з напрямків від початкової збудженої клітини, що належить контуру зображення, формують одиничний імпульс на виході клітинного автомата, при зміні напрямку розповсюдження сигналу збудження, інакше імпульс не формується, обходять сигналом збудження усі клітини контуру та формують відповідну послідовність, видаляють імпульси, які мають амплітуди, менші заданої порогової амплітуди, по отриманій послідовності визначають форму фігури, згідно з якою величини амплітуд указують на вершину та величину кута в ній, а по часу між імпульсами визначають відстані між сусідніми вершинами, перетворюють імпульсну послідовність у послідовність чисел, яку порівнюють з послідовностями, що зберігаються у пам'яті як еталонні, 4 UA 85556 U 5 10 15 20 25 30 35 якщо відбулося співпадіння з еталонною послідовністю, то фігуру вважають розпізнаною, а якщо співпадіння не відбулося, то здійснюють зсув вхідної послідовності в одному з напрямків і отриману послідовність порівнюють з еталонними послідовностями чисел, зсув вхідної послідовності здійснюють циклічно до співпадіння з еталонною послідовністю, якщо після повного циклічного зсуву співпадіння не відбулося, то вхідну послідовність записують у пам'ять, по кількості зсувів до співпадіння визначають орієнтацію фігури, який відрізняється тим, що видаляють шуми на зображенні, бінаризують зображення, виділяють об'єкти зображення та виділяють контури усіх виділених об'єктів зображення, формують імпульсні послідовності, що описують кожний об'єкт, виділяють перший об'єкт, який складається з найбільшої кількості клітин, що формують його контур, виділяють другий об'єкт, який складається з клітин, що формують його контур, кількість яких менше кількості клітин, що формують контур першого виділеного об'єкта, і більше кількості клітин, що формують інші виділені об'єкти зображення, обчислюють відстань між першим та другим виділеними об'єктами, виділяють третій об'єкт, який складається з клітин, що формують його контур, кількість яких менше кількості клітин, що формують контур другого виділеного об'єкта, і більше кількості клітин, що формують інші виділені об'єкти зображення, обчислюють відстань між першим та третім виділеним об'єктом, аналогічно послідовно виділяють усі інші об'єкти згідно з кількістю клітин, що формують їх контури, та обчислюють відстані між кожним з них та першим виділеним об'єктом зображення, при наявності однакових об'єктів по кількості клітин, першим з них розташовують той об'єкт, відстань якого менша до першого виділеного об'єкта зображення, якщо об'єкти мають однакову кількість клітин та рівні відстані до першого виділеного об'єкта, та першим вибирають той об'єкт, який перший розташовується по прямому руху годинникової стрілки кола з центром на першому виділеному об'єкті, формують імпульсну послідовність, яка складається з груп імпульсних послідовностей, кожна група з яких описує окремий виділений об'єкт, розташовують групи імпульсних послідовностей в порядку виділення об'єктів зображення, задають часові інтервали між кожною групою імпульсних послідовностей, які відповідають величині відстані між першим виділеним об'єктом, та виділеним об'єктом, що описаний заданою групою імпульсної послідовності, формують перший імпульс у кожній групі імпульсної послідовності, величина амплітуди якого відповідає напрямку розташування об'єкта відносно першого виділеного об'єкта, проводять порогову обробку сформованої імпульсної послідовності, видаляють ті групи імпульсних послідовностей, які менше заданих порогових величин по тривалості та по величині амплітуди, видаляють часові інтервали, що сформовані перед ними, перетворюють імпульсну послідовність у послідовність чисел, яку порівнюють з еталонною послідовністю, якщо відбулося співпадіння, то вважають, що фігура розпізнана, а якщо співпадіння не відбулося, то здійснюють циклічний зсув послідовності і на кожному такті зсуву здійснюють порівняння з еталонною послідовністю, якщо співпадіння не відбулося, то формують новий еталон. 5 UA 85556 U 6 UA 85556 U 7 UA 85556 U 8 UA 85556 U 9 UA 85556 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюBilan Stepan Mykolaiovych, Bilan Mykola Mykolaiovych
Автори російськоюБилан Степан Николаевич, Билан Николай Николаевич
МПК / Мітки
МПК: G06K 9/00
Мітки: розпізнавання, спосіб, зображень
Код посилання
<a href="https://ua.patents.su/12-85556-sposib-rozpiznavannya-zobrazhen.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання зображень</a>
Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури
Номер патенту: 7027
Опубліковано: 15.06.2005
Автори: Гринюк Ірина Миколаївна, Білан Степан Миколайович, Кондратенко Наталія Романівна
Мітки: площин, основі, фігур, спосіб, відношень, фігури, зображень, плоских, розпізнавання, елементів
Формула / Реферат:
Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури, що включає центрування вхідного зображення за допомогою блока центрування пристрою, повертання зображення об'єкта навколо центра на дискретний кут за допомогою блока обробки та S (БО
Спосіб розпізнавання зображень
Номер патенту: 39442
Опубліковано: 15.06.2001
Автори: Русин Богдан Павлович, Остап Володимир Петрович, Остап Олег Петрович
МПК: G06K 9/68
Мітки: розпізнавання, зображень, спосіб
Формула / Реферат:
1. Спосіб розпізнавання зображень, згідно з яким формують вхідне оцифроване растрове зображення, порівнюють з еталонними оцифрованими растровими зображеннями, вхідне і еталонні зображення подають на блок двомірного прямого швидкого дискретного перетворення Фур'є, на виході отримують масиви просторових спектрів вхідного і еталонних зображень, який відрізняється тим, що масиви просторових спектрів вхідного і еталонних зображень подають на вхід...
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 61795
Опубліковано: 25.07.2011
Автори: Білан Миколай Миколайович, Білан Степан Миколайович
МПК: G06K 9/00
Мітки: розпізнавання, плоских, спосіб, фігур, геометричних
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що перетворюють зображення в послідовність сигналів, проектують зображення фігури на фоточутливий елемент, виділяють вершини фігури і визначають відстані між сусідніми вершинами, визначають периметр фігури, формують вектор ознак, до якого входять величини периметра, кількості вершин та величин відстаней між сусідніми вершинами, порівнюють значення отриманого вектора із...
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 51190
Опубліковано: 15.11.2002
Автори: Ал Зобі Салім, Білан Степан Миколайович
Мітки: плоских, фігур, спосіб, геометричних, розпізнавання
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, що полягає у перетворенні зображення фігури в набір сигналів, який відрізняється тим, що проектують зображення фігури на фоточутливий елемент, виділяють вершини фігури і визначають відстані між сусідніми вершинами, визначають площу та периметр фігури шляхом підрахунку точок, що належать контуру та площині зображення фігури, формують вектор ознак, до якого входять величини площини, периметра,...
Спосіб розпізнавання зображень з око-процесорним виділенням визначників та пристрій для його здійснення
Номер патенту: 52616
Опубліковано: 15.01.2003
Автори: Хамди Р.Рами, Кожем'яко Андрій Вікторович, Кожем'яко Оксана Володимирівна, Кожем'яко Володимир Прокопович, Павлов Сергій Володимирович, Понура Олена Іванівна
МПК: G06G 7/14, G06K 9/48, G06K 9/00
Мітки: око-процесорним, виділенням, визначників, розпізнавання, здійснення, спосіб, пристрій, зображень
Формула / Реферат:
1. Пристрій для розпізнавання зображень з око-процесорним виділенням визначників, який містить паралельних суматорів (функціонально-інтегральних синтезаторів), який відрізняється тим, що додатково введені аналізатор інформації, блок синтезатора-генератора визначників, блок формування бази еталонних знань та вибору зразків еталонів, схема порівняння, що містить
Попередній патент: Спосіб лікування хворих на хронічний середній секреторний отит з ретракційними кишенями
Наступний патент: Сталева фібра з фіксованим центром тяжіння для армування залізобетонних виробів
Випадковий патент: Спосіб видалення йоду з мінералізованих пластових вод