Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури
Номер патенту: 7027
Опубліковано: 15.06.2005
Автори: Білан Степан Миколайович, Кондратенко Наталія Романівна, Гринюк Ірина Миколаївна
Формула / Реферат
Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури, що включає центрування вхідного зображення за допомогою блока центрування пристрою, повертання зображення об'єкта навколо центра на дискретний кут ![]() за допомогою блока обробки
за допомогою блока обробки ![]() та S (БО
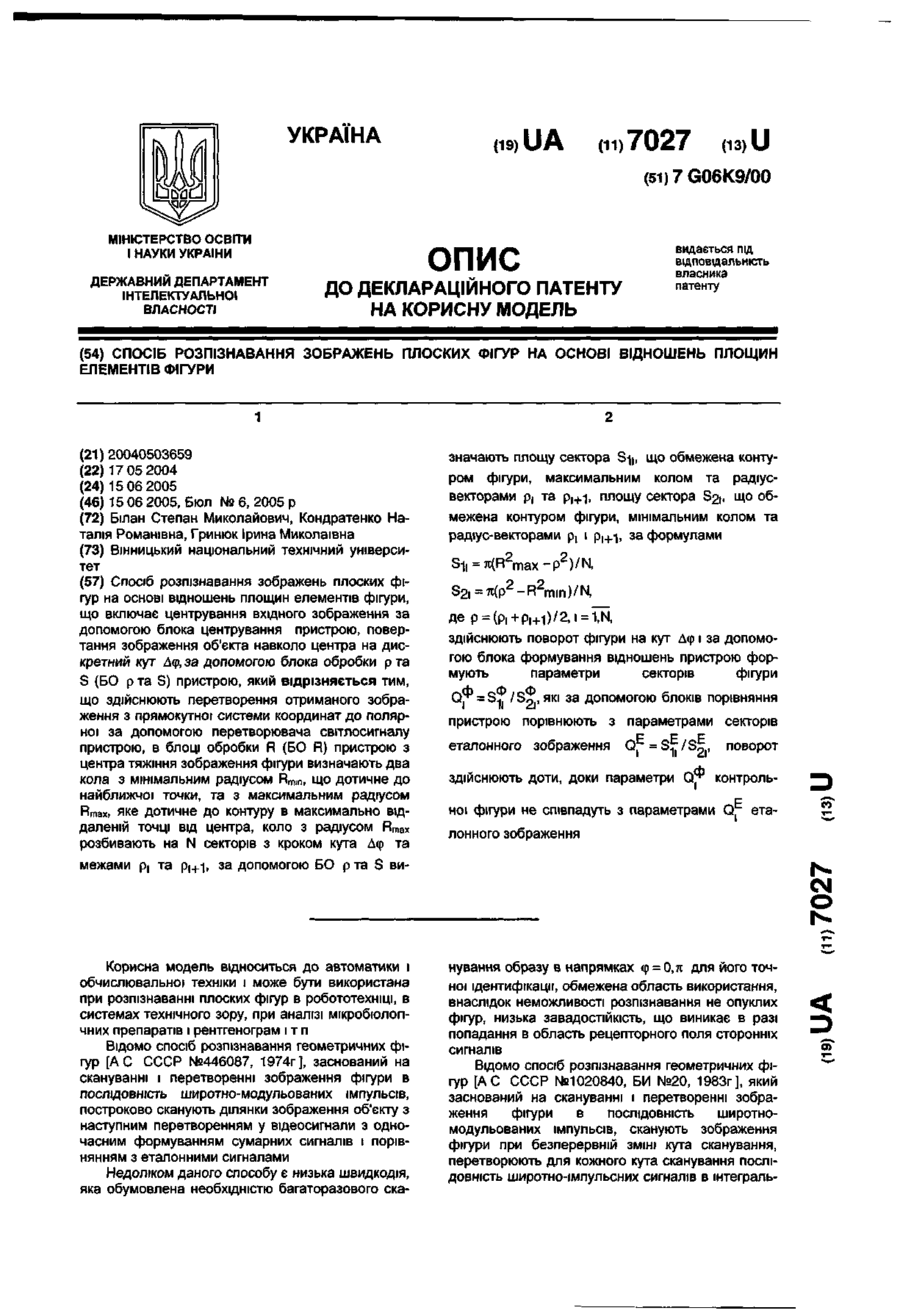
та S (БО ![]() та S) пристрою, який відрізняється тим, що здійснюють перетворення отриманого зображення з прямокутної системи координат до полярної за допомогою перетворювача світлосигналу пристрою, в блоці обробки R (БО R) пристрою з центра тяжіння зображення фігури визначають два кола: з мінімальним радіусом Rmin, що дотичне до найближчої точки, та з максимальним радіусом Rmax, яке дотичне до контуру в максимально віддаленій точці від центра, коло з радіусом Rmax розбивають на N секторів з кроком кута
та S) пристрою, який відрізняється тим, що здійснюють перетворення отриманого зображення з прямокутної системи координат до полярної за допомогою перетворювача світлосигналу пристрою, в блоці обробки R (БО R) пристрою з центра тяжіння зображення фігури визначають два кола: з мінімальним радіусом Rmin, що дотичне до найближчої точки, та з максимальним радіусом Rmax, яке дотичне до контуру в максимально віддаленій точці від центра, коло з радіусом Rmax розбивають на N секторів з кроком кута ![]() та межами
та межами ![]() та
та ![]() за допомогою БО
за допомогою БО ![]() та S визначають площу сектора
та S визначають площу сектора ![]() що обмежена контуром фігури, максимальним колом та радіус-векторами
що обмежена контуром фігури, максимальним колом та радіус-векторами ![]() та
та ![]() площу сектора
площу сектора ![]() що обмежена контуром фігури, мінімальним колом та радіус-векторами
що обмежена контуром фігури, мінімальним колом та радіус-векторами ![]() і
і ![]() за формулами
за формулами
де ![]()
здійснюють поворот фігури на кут ![]() і за допомогою блока формування відношень пристрою формують параметри секторів фігури
і за допомогою блока формування відношень пристрою формують параметри секторів фігури ![]() =
=![]() які за допомогою блоків порівняння пристрою порівнюють з параметрами секторів еталонного зображення
які за допомогою блоків порівняння пристрою порівнюють з параметрами секторів еталонного зображення ![]() поворот здійснюють доти, доки параметри
поворот здійснюють доти, доки параметри ![]() контрольної фігури не співпадуть з параметрами
контрольної фігури не співпадуть з параметрами ![]() еталонного зображення.
еталонного зображення.
Текст
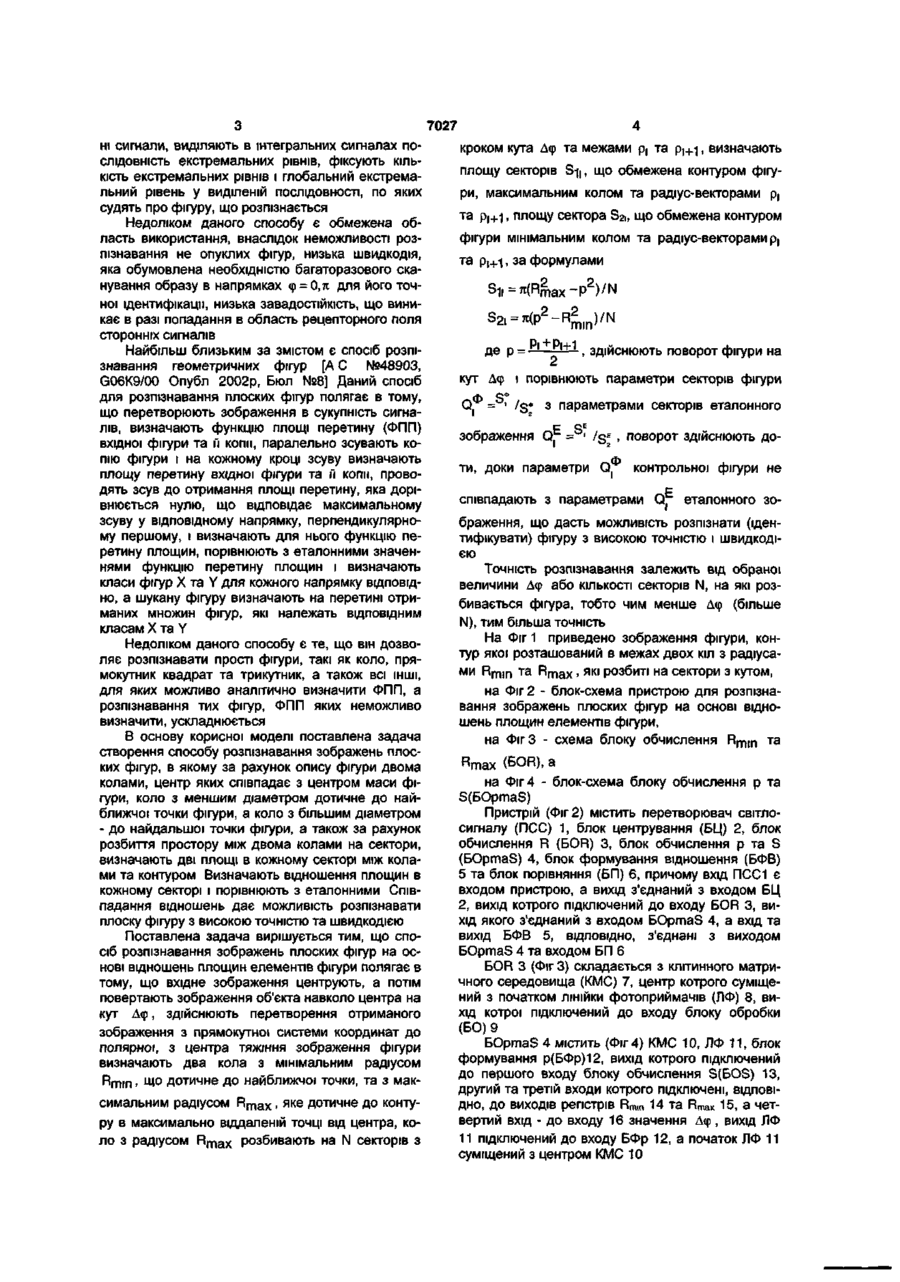
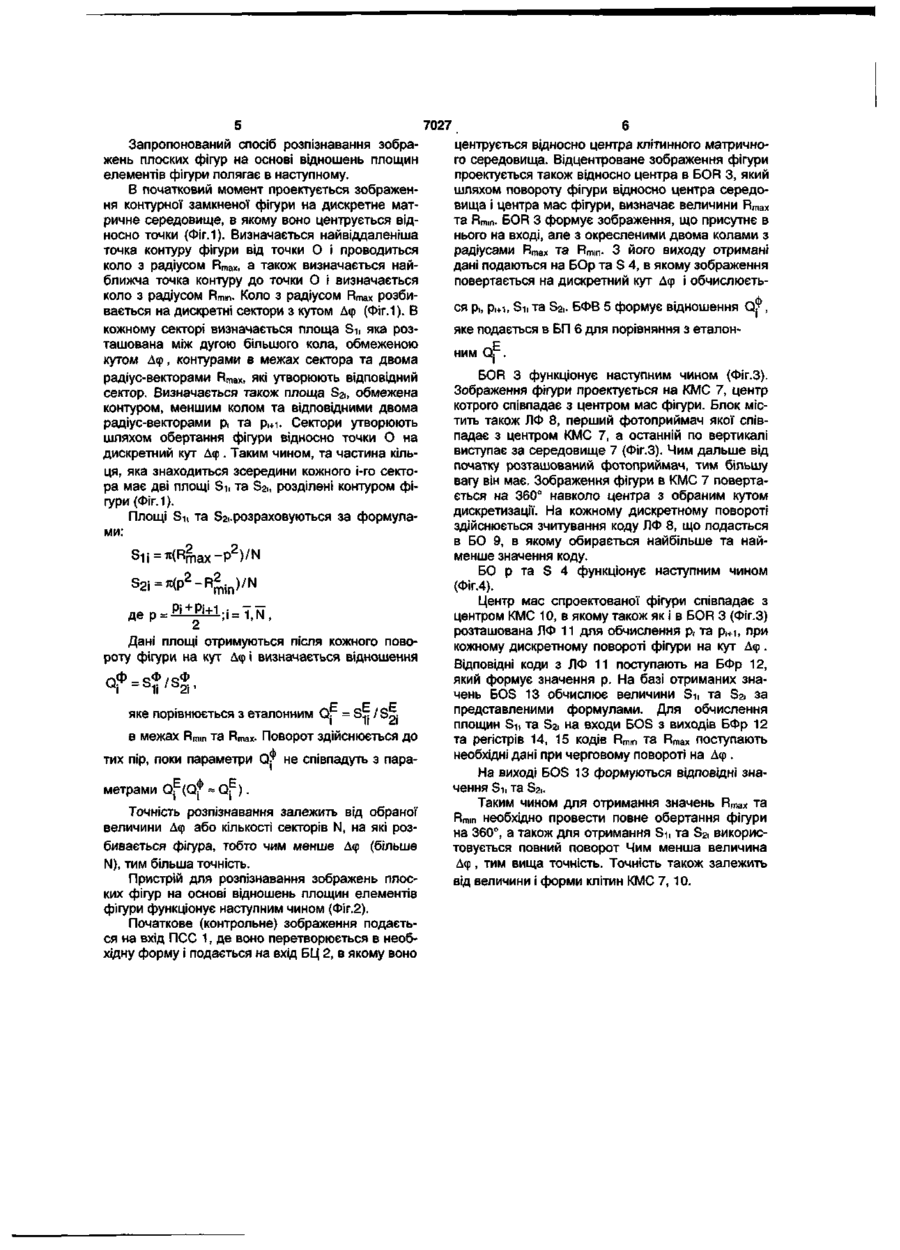
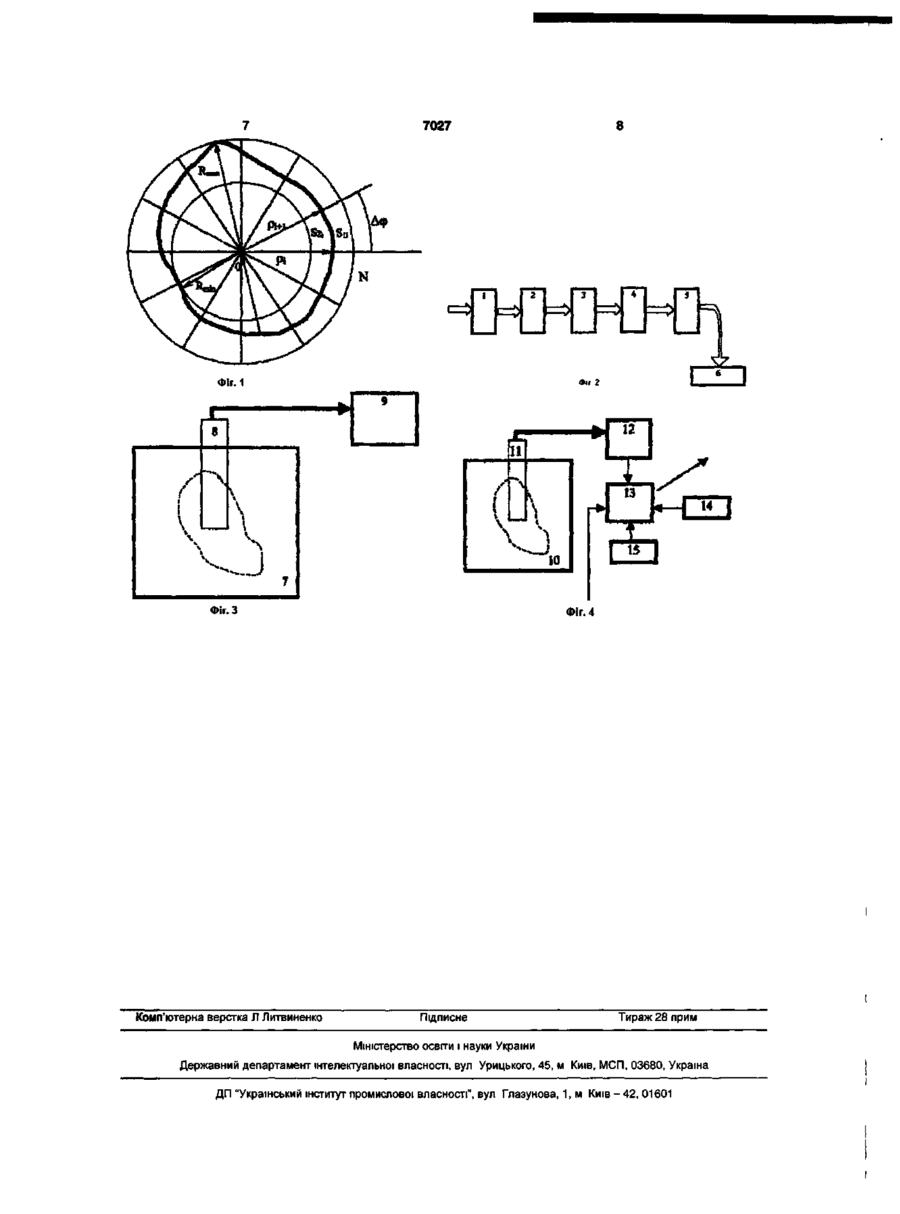
Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури, що включає центрування вхідного зображення за допомогою блока центрування пристрою, повертання зображення об'єкта навколо центра на дискретний кут Аф, за допомогою блока обробки р та S (БО р та S) пристрою, який відрізняється тим, що здійснюють перетворення отриманого зображення з прямокутної системи координат до полярної за допомогою перетворювача світлосигналу пристрою, в блоці обробки R (БО R) пристрою з центра тяжіння зображення фігури визначають два кола з мінімальним радіусом Rmm, що дотичне до найближчої точки, та з максимальним радіусом Rmax, ЯКЄ ДОТИЧНЄ ДО КОНТуру В МЭКСИМЭЛЬНО В1Д даленій точці від центра, коло з радіусом Rmax розбивають на N секторів з кроком кута Дф та значають площу сектора S-\]t що обмежена контуром фігури, максимальним колом та радіусвекторами Р| та р|+-|, площу сектора S^, що обмежена контуром фігури, мінімальним колом та радіус-векторами р, і p,+-j, за формулами Si,=7t(R 2 max-p 2 )/N, S 2 ,=7t(p 2 -R 2 min)/N, де р = здійснюють поворот фігури на кут Дф і за допомогою блока формування відношень пристрою формують параметри секторів фігури Q * = S7 > /S?,flKi за допомогою блоків порівняння пристрою порівнюють з параметрами секторів еталонного зображення Q• -SSr/Sp., поворот здійснюють доти, доки параметри Q * контрольQ* ної фігури не співпадуть з параметрами 0 5 ета со лонного зображення межами рі та р!+-|, за допомогою БО р та S ви СМ о Корисна модель відноситься до автоматики і обчислювальної техніки і може бути використана при розпізнаванні плоских фігур в робототехніці, в системах технічного зору, при аналізі мікробіологічних препаратів і рентгенограм і т п Відомо спосіб розпізнавання геометричних фігур [АС СССР №446087, 1974г], заснований на скануванні і перетворенні зображення фігури в ПОСЛІДОВНІСТЬ широтно-модульованих імпульсів, построково сканують ділянки зображення об'єкту з наступним перетворенням у відеосигнали з одночасним формуванням сумарних сигналів і порівнянням з еталонними сигналами Недоліком даного способу є низька швидкодія, яка обумовлена необхідністю багаторазового ска нування образу в напрямках 7027 ні сигнали, виділяють в інтегральних сигналах ПОСЛІДОВНІСТЬ екстремальних рівнів, фіксують КІЛЬКІСТЬ екстремальних рівнів і глобальний екстремальний рівень у виділеній ПОСЛІДОВНОСТІ, по яких судять про фігуру, що розпізнається Недоліком даного способу є обмежена область використання, внаслідок неможливості розпізнавання не опуклих фігур, низька швидкодія, яка обумовлена необхідністю багаторазового сканування образу в напрямках ф = 0,и для його точної ідентифікації, низька завадостійкість, що виникає в разі попадання в область рецепторного поля сторонніх сигналів Найбільш близьким за змістом є спосіб розпізнавання геометричних фігур [А С №48903, G06K9/00 Опубл 2002р, Бюл №8] Даний спосіб для розпізнавання плоских фігур полягає в тому, що перетворюють зображення в сукупність сигналів, визначають функцію площі перетину (ФПП) вхідної фігури та ґі копи, паралельно зсувають копію фігури і на кожному кроці зсуву визначають площу перетину вхідної фігури та її копи, проводять зсув до отримання площі перетину, яка дорівнюється нулю, що відповідає максимальному зсуву у відповідному напрямку, перпендикулярному першому, і визначають для нього функцію перетину площин, порівнюють з еталонними значеннями функцію перетину площин і визначають класи фтур X та Y для кожного напрямку ВІДПОВІДНО, а шукану фігуру визначають на перетині отриманих множин ф|ГУР, які належать ВІДПОВІДНИМ класам X та Y Недоліком даного способу є те, що він дозволяє розпізнавати прості фігури, такі як коло, прямокутник квадрат та трикутник, а також всі ІНШІ, для яких можливо аналітично визначити ФПП, а розпізнавання тих фігур, ФПП яких неможливо визначити, ускладнюється В основу корисної моделі поставлена задача створення способу розпізнавання зображень плоских фтур, в якому за рахунок опису фігури двома колами, центр яких співпадає з центром маси фігури, коло з меншим діаметром дотичне до найближчої точки фігури, а коло з більшим діаметром - до найдальшої точки фігури, а також за рахунок розбиття простору між двома колами на сектори, визначають дві площі в кожному секторі між колами та контуром Визначають відношення площин в кожному секторі і порівнюють з еталонними Співпадання відношень дає можливість розпізнавати плоску фігуру з високою точністю та швидкодією Поставлена задача вирішується тим, що спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури полягає в тому, що вхідне зображення центрують, а потім повертають зображення об'єкта навколо центра на кут Дф, здійснюють перетворення отриманого зображення з прямокутної системи координат до полярної, з центра тяжіння зображення фігури визначають два кола з мінімальним радіусом R m m , що дотичне до найближчої точки, та з максимальним радіусом R m ax > я к е дотичне до контуру в максимально віддаленій точці від центра, коло з радіусом Rmax розбивають на N секторів з кроком кута Дф та межами р, та р ) + і , визначають площу секторів S-||, що обмежена контуром фігури, максимальним колом та радіус-векторами р, та р , + і , площу сектора S21, що обмежена контуром фігури мінімальним колом та радіус-векторами р, та р,+-|, за формулами де р = _ здійснюють поворот фігури на кут Д і порівнюють параметри секторів фігури ф параметрами секторів еталонного зображення Q = ' А;6 , поворот здійснюють до/* ти, доки параметри О./* контрольної фігури не співпадають з параметрами Q^ еталонного зображення, що дасть можливість розпізнати (ідентифікувати) фігуру з високою точністю і швидкодією Точність розпізнавання залежить від обраної величини Дф або КІЛЬКОСТІ секторів N, на які розбивається фігура, тобто чим менше Д (більше ф N), тим більша точність На Фіг 1 приведено зображення фігури, контур якої розташований в межах двох кіл з радіусам и Rmin т а Rmax > Я К І розбиті на сектори з кутом, на Фіг 2 - блок-схема пристрою для розпізнавання зображень плоских фігур на основі відношень площин елементів фігури, на Фіг 3 - схема блоку обчислення R m in та Rmax (БОЯ), а на Фіг 4 - блок-схема блоку обчислення р та S(BOpmaS) Пристрій (Фіг 2) містить перетворювач світлосигналу (ПСС) 1, блок центрування (БЦ) 2, блок обчислення R (BOR) 3, блок обчислення р та S (BOpmaS) 4, блок формування відношення (БФВ) 5 та блок порівняння (БП) 6, причому вхід ПСС1 є входом пристрою, а вихід з'єднаний з входом БЦ 2, вихід котрого підключений до входу BOR 3, вихід якого з'єднаний з входом BOpmaS 4, а вхід та вихід БФВ 5, ВІДПОВІДНО, з'єднані з виходом BOpmaS 4 та входом БП 6 BOR З (Фіг 3) складається з клітинного матричного середовища (КМС) 7, центр котрого суміщений з початком ЛІНІЙКИ фотоприймачів (ЛФ) 8, вихід котрої підключений до входу блоку обробки (БО) 9 BOpmaS 4 містить (Фіг 4) КМС 10, ЛФ 11, блок формування р(БФр)12, вихід котрого підключений до першого входу блоку обчислення S(BOS) 13, другий та третій входи котрого підключені, ВІДПОВІДНО, до виходів регістрів Rmin 14 та Rma* 15, а четвертий вхід - до входу 16 значення Дф , вихід ЛФ 11 підключений до входу БФр 12, а початок ЛФ 11 суміщений з центром КМС 10 7027 Запропонований спосіб розпізнавання зобрацентрується відносно центра клітинного матричножень плоских фігур на основі відношень площин го середовища. Відцентроване зображення фігури елементів фігури полягає в наступному. проектується також відносно центра в BOR 3, який В початковий момент проектується зображеншляхом повороту фігури відносно центра середоня контурної замкненої фігури на дискретне матвища і центра мас фігури, визначає величини Rmax ричне середовище, в якому воно центрується відта Rmm. BOR 3 формує зображення, що присутнє в носно точки (Фіг.1). Визначається найвіддаленіша нього на вході, але з окресленими двома колами з точка контуру фігури від точки О і проводиться радіусами Rmax та Rmm- 3 його виходу отримані коло з радіусом Rmax, а також визначається найближча точка контуру до точки О і визначається дані подаються на БОр та S 4, в якому зображення коло з радіусом Rm,n. Коло з радіусом Rmax розбиповертається на дискретний кут Дф і обчислюєтьвається на дискретні сектори з кутом Аф (Фіг.1). В ся р,, р,+і, Sii та S2i. БФВ 5 формує відношення Q?, кожному секторі визначається площа Si, яка розяке подається в БП 6 для порівняння з еталонташована між дугою більшого кола, обмеженою ним Q. . кутом Дф, контурами в межах сектора та двома BOR 3 функціонує наступним чином (Фіг.З). радіус-векторами Rmax, які утворюють відповідний Зображення фігури проектується на КМС 7, центр сектор. Визначається також площа S21, обмежена котрого співпадає з центром мас фігури. Блок місконтуром, меншим колом та відповідними двома тить також ЛФ 8, перший фотоприймач якої співрадіус-векторами р, та р,+і. Сектори утворюють падає з центром КМС 7, а останній по вертикалі шляхом обертання фігури відносно точки О на виступає за середовище 7 (Фіг.З). Чим дальше від дискретний кут Дф . Таким чином, та частина кільпочатку розташований фотоприймач, тим більшу ця, яка знаходиться зсередини кожного і-го сектовагу він має. Зображення фігури в КМС 7 повертара має дві площі Si, та S21, розділені контуром фіється на 360° навколо центра з обраним кутом гури (Фіг.1). дискретизації. На кожному дискретному повороті Площі S-ii та Эа-розраховуються за формулаздійснюється зчитування коду ЛФ 8, що подасться ми: в БО 9, в якому обирається найбільше та найменше значення коду. БО р та S 4 функціонує наступним чином (Фіг.4). Центр мас спроектованої фігури співпадає з центром КМС 10, в якому також як і в BOR 3 (Фіг.З) розташована ЛФ 11 для обчислення р, та р,+і, при Дані площі отримуються після кожного повокожному дискретному повороті фігури на кут Дф . роту фігури на кут Д р і визначається відношення е Відповідні коди з ЛФ 11 поступають на БФр 12, який формує значення р. На базі отриманих знапФ Ф а і 2і чень BOS 13 обчислює величини Si, та S2i за представленими формулами. Для обчислення яке порівнюється з еталонним Q. = S:: / Sp: площин Si, та Sa на входи BOS з виходів БФр 12 та регістрів 14, 15 кодів Rmin та Rmax поступають в межах R m та Rmax. Поворот здійснюється до m необхідні дані при черговому повороті на Дф . тих пір, поки параметри Q^ не співпадуть з параНа виході BOS 13 формуються відповідні значення Si, та S2,. метрами Ор(О.Ф « Q p ) . Таким чином для отримання значень Rmax та Точність розпізнавання залежить від обраної Rm,n НеобхІДНО ПрОВвСТИ ПОВНЄ Обертання фігури величини Д або кількості секторів N, на які розф на 360°, а також для отримання Si, та S2, викорисбивається фігура, тобто чим менше Дф (більше товується повний поворот Чим менша величина N), тим більша точність. Дф, тим вища точність. Точність також залежить Пристрій для розпізнавання зображень плосвід величини і форми клітин КМС 7, 10. ких фігур на основі відношень площин елементів фігури функціонує наступним чином (Фіг.2). Початкове (контрольне) зображення подається на вхід ПСС 1, де воно перетворюється в необхідну форму і подається на вхід БЦ 2, в якому воно 7027 4 3 Фіг. 1 Фіг 5 I 2 1 в 11 ґ - \ \\ 1 1 \ \ 1 1 \ t гчштт \ \ 7 Фіг. З Комп'ютерна верстка Л Литвиненко Фіг. 4 Підписне Тираж 28 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м Київ - 4 2 , 01601 6 1
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for identifying pictures of planar figures by the ratios between the areas of the figure elements
Автори англійськоюBilan Stepan Mykolaiovych, Kondratenko Nataliya Romanivna
Назва патенту російськоюСпособ распознавания изображений плоских фигур по отношениям площадей элементов фигуры
Автори російськоюБилан Степан Николаевич, Кондратенко Наталья Романовна
МПК / Мітки
Мітки: елементів, спосіб, основі, фігур, площин, плоских, розпізнавання, відношень, фігури, зображень
Код посилання
<a href="https://ua.patents.su/4-7027-sposib-rozpiznavannya-zobrazhen-ploskikh-figur-na-osnovi-vidnoshen-ploshhin-elementiv-figuri.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури</a>
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 51190
Опубліковано: 15.11.2002
Автори: Ал Зобі Салім, Білан Степан Миколайович
Мітки: розпізнавання, плоских, фігур, геометричних, спосіб
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, що полягає у перетворенні зображення фігури в набір сигналів, який відрізняється тим, що проектують зображення фігури на фоточутливий елемент, виділяють вершини фігури і визначають відстані між сусідніми вершинами, визначають площу та периметр фігури шляхом підрахунку точок, що належать контуру та площині зображення фігури, формують вектор ознак, до якого входять величини площини, периметра,...
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 48903
Опубліковано: 15.08.2002
Автори: Южаков Сергій Васильович, Білан Степан Миколайович, Бендерук Ірина Миколаївна, Домбровська Наталія Валентинівна
Мітки: плоских, фігур, спосіб, розпізнавання, геометричних
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що сканують і перетворюють зображення в послідовність сигналів, який відрізняється тим, що визначають функцію площі перетину вхідної фігури та її копії, паралельно зсувають копію фігури і на кожному кроці зсуву визначають площу перетину вхідної фігури та її копії, проводять зсув до отримання площі перетину, яка дорівнює нулю, що відповідає максимальному зсуву у відповідному...
Спосіб розпізнавання зображень
Номер патенту: 39442
Опубліковано: 15.06.2001
Автори: Остап Олег Петрович, Русин Богдан Павлович, Остап Володимир Петрович
МПК: G06K 9/68
Мітки: спосіб, розпізнавання, зображень
Формула / Реферат:
1. Спосіб розпізнавання зображень, згідно з яким формують вхідне оцифроване растрове зображення, порівнюють з еталонними оцифрованими растровими зображеннями, вхідне і еталонні зображення подають на блок двомірного прямого швидкого дискретного перетворення Фур'є, на виході отримують масиви просторових спектрів вхідного і еталонних зображень, який відрізняється тим, що масиви просторових спектрів вхідного і еталонних зображень подають на вхід...
Спосіб розпізнавання зображень з око-процесорним виділенням визначників та пристрій для його здійснення
Номер патенту: 52616
Опубліковано: 15.01.2003
Автори: Хамди Р.Рами, Павлов Сергій Володимирович, Кожем'яко Андрій Вікторович, Кожем'яко Оксана Володимирівна, Понура Олена Іванівна, Кожем'яко Володимир Прокопович
МПК: G06G 7/14, G06K 9/48, G06K 9/00
Мітки: визначників, зображень, спосіб, здійснення, виділенням, пристрій, око-процесорним, розпізнавання
Формула / Реферат:
1. Пристрій для розпізнавання зображень з око-процесорним виділенням визначників, який містить паралельних суматорів (функціонально-інтегральних синтезаторів), який відрізняється тим, що додатково введені аналізатор інформації, блок синтезатора-генератора визначників, блок формування бази еталонних знань та вибору зразків еталонів, схема порівняння, що містить
Спосіб отримання плоских, тримірних і стереоскопічних зображень поверхні об’єктів та пристрій для його здійснення
Номер патенту: 36089
Опубліковано: 16.04.2001
Автори: Бородін Микола Олексійович, Макарчук Володимир Миколайович
МПК: G01B 11/00
Мітки: об'єктів, стереоскопічних, спосіб, тримірних, отримання, пристрій, плоских, поверхні, здійснення, зображень
Текст:
...при необхідності промінь на поверхні, отримуємо в пам'яті блоку обробки три електронні копії зображення поверхні зразка разом з координатою z. Цієї інформації виявляється досить, щоб після обробки цих зображень по заданому алгоритму побудува ти плоске, тримірне або стереоскопічне (в доповнюючих кольорах) зображення поверхні об'єкта 3 і вивести його на екран монітора. Оскільки освітлення об'єкта 3 проводиться по нормалі до поверхні, і відбите...
Попередній патент: Сушильна камера з перфорованими перегородками
Наступний патент: Застібка-блискавка
Випадковий патент: Наночастинка, що містить рапаміцин і альбумін, у ролі протиракового агента