Спосіб побудови пристрою для електрорезистивної томографії (ерт)
Формула / Реферат
Спосіб побудови пристрою для електрорезистивної томографії (ЕРТ), при якому кожен з його вузлів, на які відображається матриця заземлювачів (електродів), в межах якої реалізується конфігурація тієї чи іншої вимірювальної установки, може виступати як струмовим (А чи В), так і потенціальним (М чи N), який відрізняється тим, що у кожному окремому вузлі вводиться окрема схема керування для управління комутуючими елементами, а кожному вузлу присвоюється унікальна адреса, що задається на етапі конфігурування вимірювальної установки.
Текст
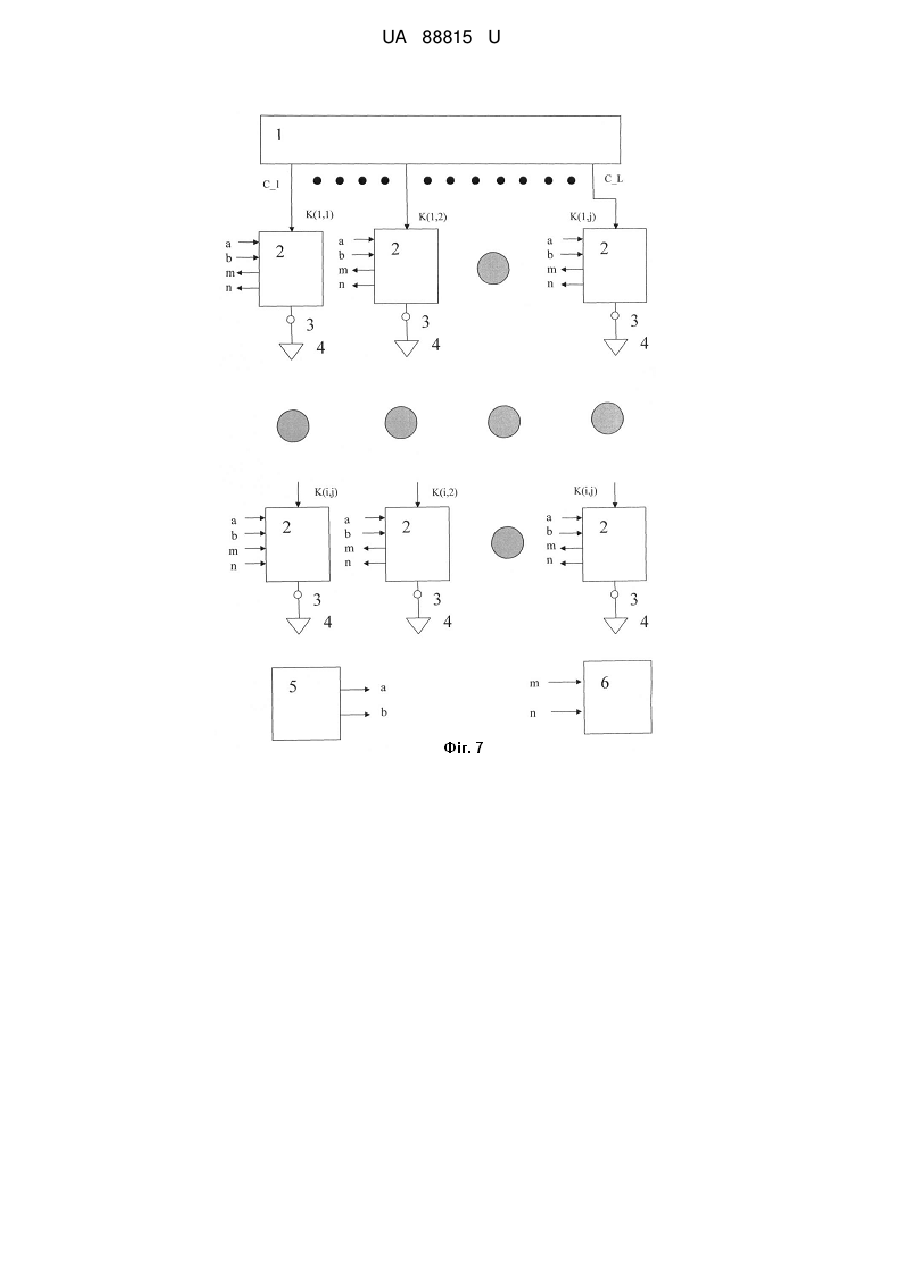
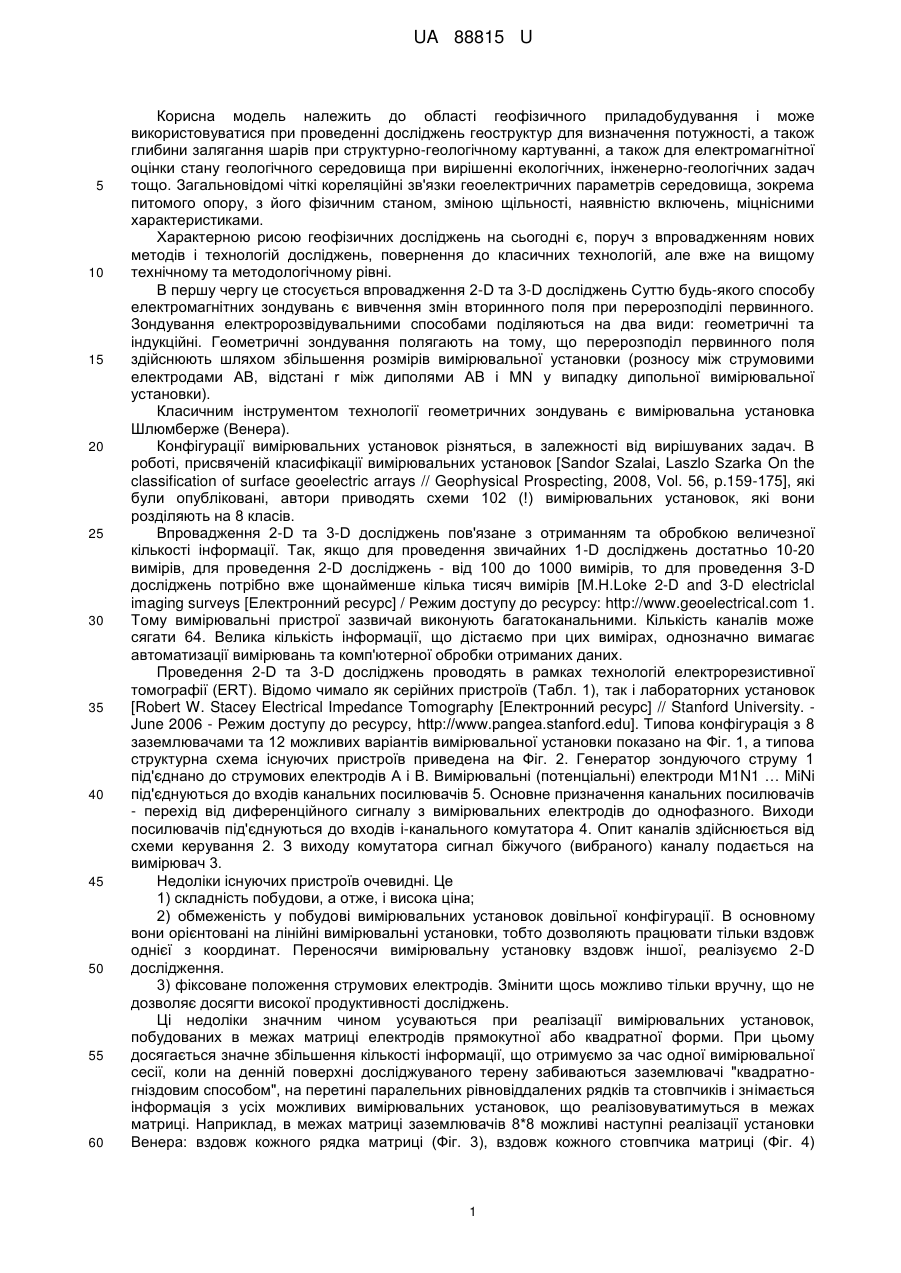
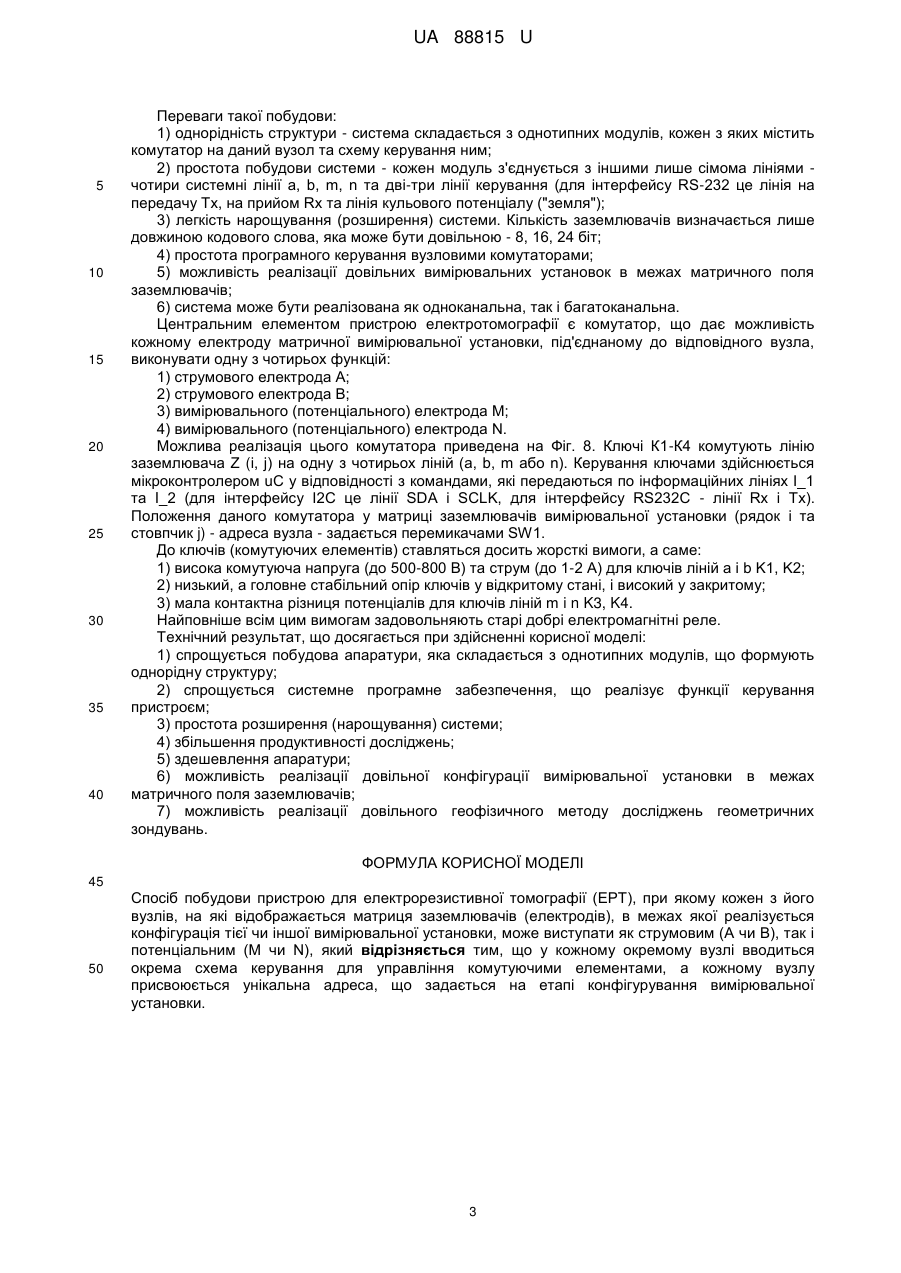
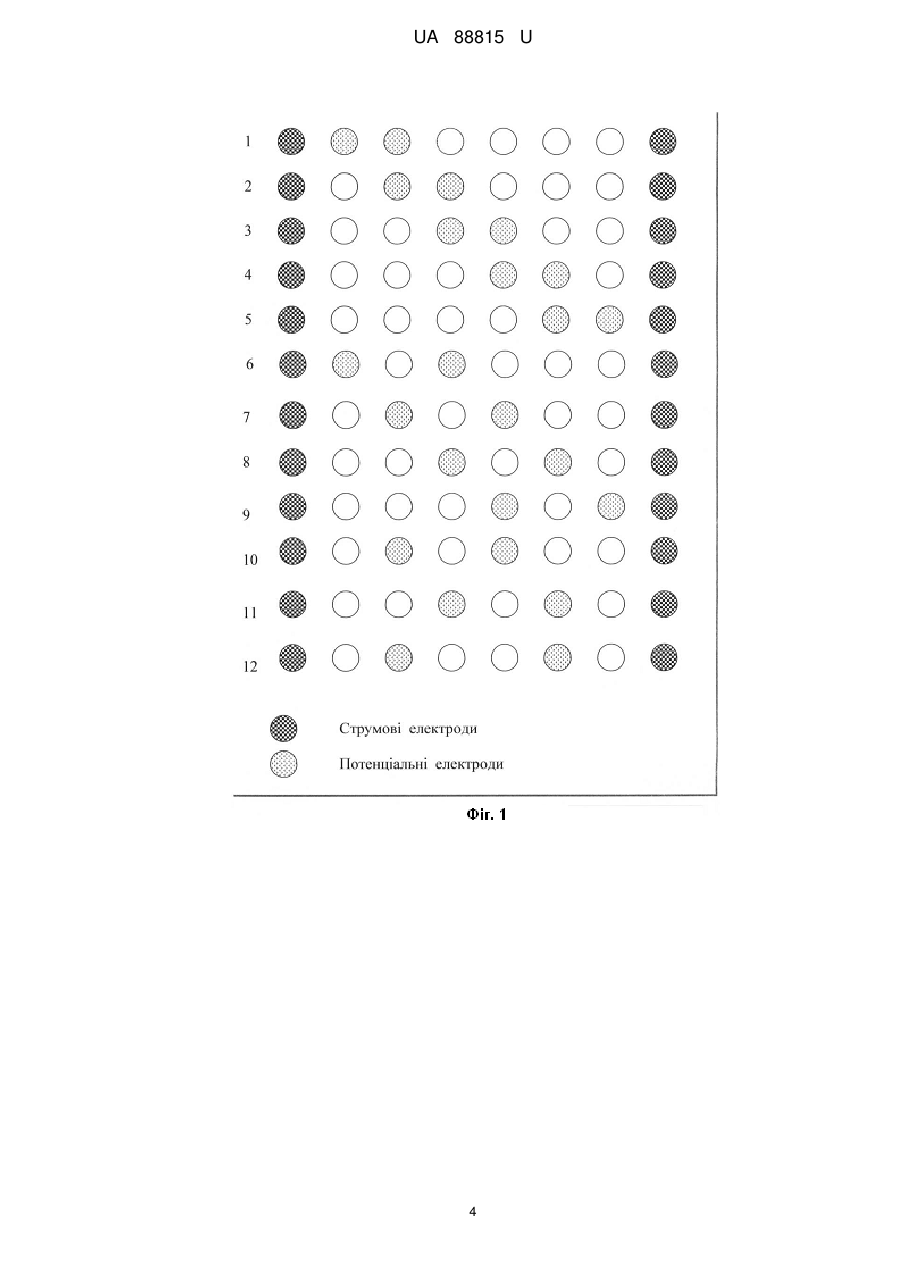
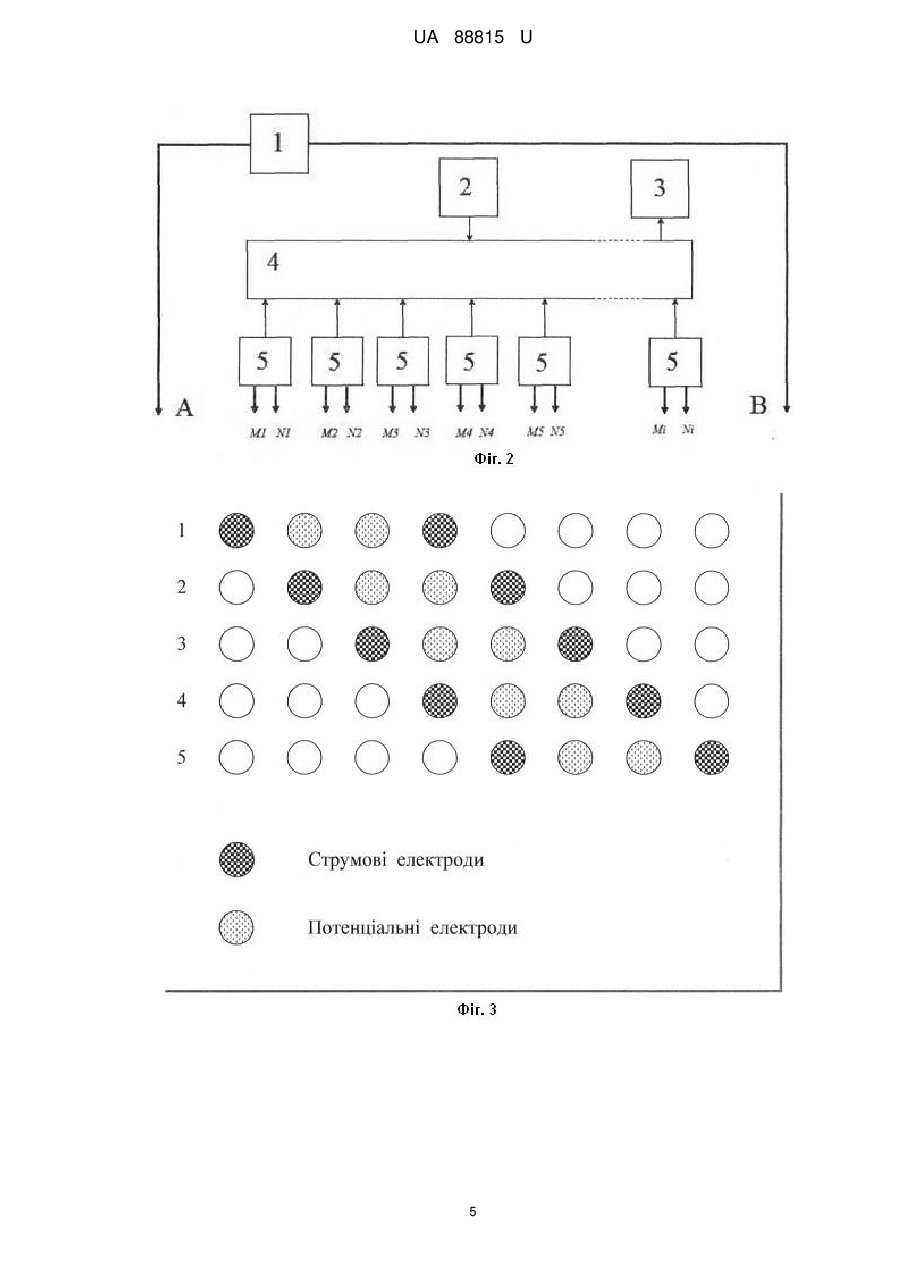
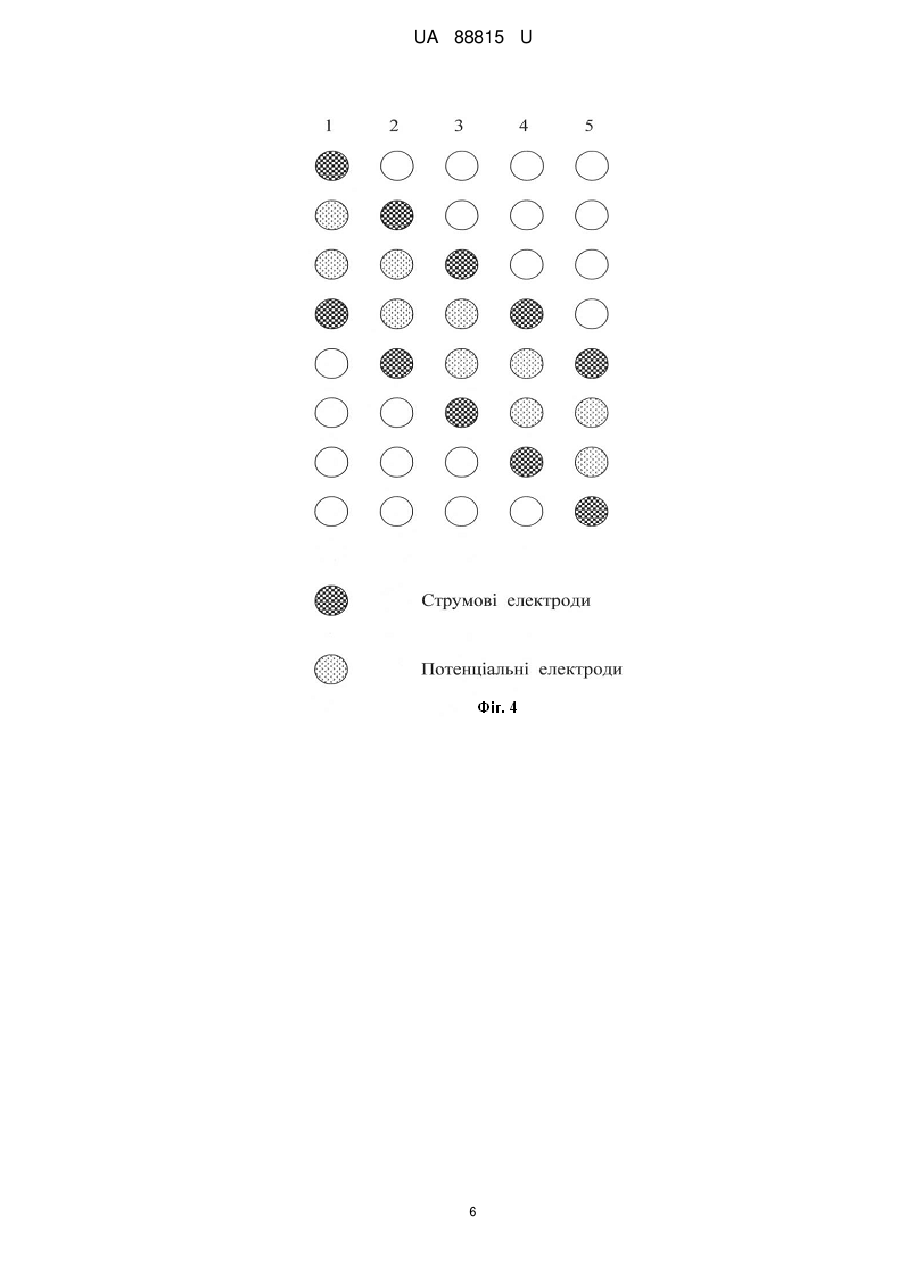
Реферат: UA 88815 U UA 88815 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області геофізичного приладобудування і може використовуватися при проведенні досліджень геоструктур для визначення потужності, а також глибини залягання шарів при структурно-геологічному картуванні, а також для електромагнітної оцінки стану геологічного середовища при вирішенні екологічних, інженерно-геологічних задач тощо. Загальновідомі чіткі кореляційні зв'язки геоелектричних параметрів середовища, зокрема питомого опору, з його фізичним станом, зміною щільності, наявністю включень, міцнісними характеристиками. Характерною рисою геофізичних досліджень на сьогодні є, поруч з впровадженням нових методів і технологій досліджень, повернення до класичних технологій, але вже на вищому технічному та методологічному рівні. В першу чергу це стосується впровадження 2-D та 3-D досліджень Суттю будь-якого способу електромагнітних зондувань є вивчення змін вторинного поля при перерозподілі первинного. Зондування електророзвідувальними способами поділяються на два види: геометричні та індукційні. Геометричні зондування полягають на тому, що перерозподіл первинного поля здійснюють шляхом збільшення розмірів вимірювальної установки (розносу між струмовими електродами АВ, відстані r між диполями АВ і MN у випадку дипольної вимірювальної установки). Класичним інструментом технології геометричних зондувань є вимірювальна установка Шлюмберже (Венера). Конфігурації вимірювальних установок різняться, в залежності від вирішуваних задач. В роботі, присвяченій класифікації вимірювальних установок [Sandor Szalai, Laszlo Szarka On the classification of surface geoelectric arrays // Geophysical Prospecting, 2008, Vol. 56, p.159-175], які були опубліковані, автори приводять схеми 102 (!) вимірювальних установок, які вони розділяють на 8 класів. Впровадження 2-D та 3-D досліджень пов'язане з отриманням та обробкою величезної кількості інформації. Так, якщо для проведення звичайних 1-D досліджень достатньо 10-20 вимірів, для проведення 2-D досліджень - від 100 до 1000 вимірів, то для проведення 3-D досліджень потрібно вже щонайменше кілька тисяч вимірів [M.H.Loke 2-D and 3-D electriclal imaging surveys [Електронний ресурс] / Режим доступу до ресурсу: http://www.geoelectrical.com 1. Тому вимірювальні пристрої зазвичай виконують багатоканальними. Кількість каналів може сягати 64. Велика кількість інформації, що дістаємо при цих вимірах, однозначно вимагає автоматизації вимірювань та комп'ютерної обробки отриманих даних. Проведення 2-D та 3-D досліджень проводять в рамках технологій електрорезистивної томографії (ERT). Відомо чимало як серійних пристроїв (Табл. 1), так і лабораторних установок [Robert W. Stacey Electrical Impedance Tomography [Електронний ресурс] // Stanford University. June 2006 - Режим доступу до ресурсу, http://www.pangea.stanford.edu]. Типова конфігурація з 8 заземлювачами та 12 можливих варіантів вимірювальної установки показано на Фіг. 1, а типова структурна схема існуючих пристроїв приведена на Фіг. 2. Генератор зондуючого струму 1 під'єднано до струмових електродів А і В. Вимірювальні (потенціальні) електроди M1N1 … MiNi під'єднуються до входів канальних посилювачів 5. Основне призначення канальних посилювачів - перехід від диференційного сигналу з вимірювальних електродів до однофазного. Виходи посилювачів під'єднуються до входів і-канального комутатора 4. Опит каналів здійснюється від схеми керування 2. З виходу комутатора сигнал біжучого (вибраного) каналу подається на вимірювач 3. Недоліки існуючих пристроїв очевидні. Це 1) складність побудови, а отже, і висока ціна; 2) обмеженість у побудові вимірювальних установок довільної конфігурації. В основному вони орієнтовані на лінійні вимірювальні установки, тобто дозволяють працювати тільки вздовж однієї з координат. Переносячи вимірювальну установку вздовж іншої, реалізуємо 2-D дослідження. 3) фіксоване положення струмових електродів. Змінити щось можливо тільки вручну, що не дозволяє досягти високої продуктивності досліджень. Ці недоліки значним чином усуваються при реалізації вимірювальних установок, побудованих в межах матриці електродів прямокутної або квадратної форми. При цьому досягається значне збільшення кількості інформації, що отримуємо за час одної вимірювальної сесії, коли на денній поверхні досліджуваного терену забиваються заземлювачі "квадратногніздовим способом", на перетині паралельних рівновіддалених рядків та стовпчиків і знімається інформація з усіх можливих вимірювальних установок, що реалізовуватимуться в межах матриці. Наприклад, в межах матриці заземлювачів 8*8 можливі наступні реалізації установки Венера: вздовж кожного рядка матриці (Фіг. 3), вздовж кожного стовпчика матриці (Фіг. 4) 1 UA 88815 U 5 10 15 20 25 вздовж діагоналей (Фіг. 5 та Фіг. 6), порівняно з лінійною організацією. Віднісши додатково один або два заземлювачі в "нескінченість", реалізуємо додатково ще три вимірювальні установки з відповідними наборами даних. Задачею корисної моделі є підвищення продуктивності, точності і достовірності зондувань геологічного середовища. Поставлена задача вирішується тим, що спосіб побудови пристрою для електрорезистивної томографії (ЕРТ), при якому кожен з його вузлів, на які відображається матриця заземлювачів (електродів), в межах якої реалізується конфігурація тієї чи іншої вимірювальної установки, може виступати як струмовим (А чи В), так і потенціальним (М чи N), згідно з корисною моделлю, що у кожному окремому вузлі вводиться окрема схема керування для управління комутуючими елементами, а кожному вузлу присвоюється унікальна адреса, що задається на етапі конфігурування вимірювальної установки. Блок-схема пропонованого пристрою приведена на Фіг. 7. Для розуміння суті корисної моделі схема керування комутаторами відокремлена в окремий блок. Однак насправді кожен комутатор має свою схему керування, яка відгукується на унікальну адресу цього комутатора. Ця адреса задається при конфігуруванні пристрою. Кожен електрод 4 під'єднується до відповідного вузла вимірювального пристрою через клему 3. Можна сказати, що матриця заземлювачів, які програмуються як вимірювальні (потенціальні) або струмові електроди, відображається на матрицю вузлів вимірювального пристрою. Кожен вузол містить комутатор 2, до якого під'єднуються лінії вимірювальних(потенціальних) електродів m, n, що сполучаються з входами вимірювача 6 та лінії струмових електродів a, b генератора зондуючого струму 5 вимірювального пристрою. Керування комутатором здійснюється від схеми керування 1. Це відображено зв'язками С_1 … C_L до вузлового комутатора K(i, j), де і, j - відповідно номер рядка і стовпчика, які унікальні для кожного вузла і задаються при налаштуванні пристрою. Цілком очевидно, що L = і*j. В залежності від стану (положення) комутатора 2, заземлювач може виконувати функції вимірювальних (потенціальних) (М, N) або струмових (А, В) електродів. Таблиця № 1. 2. 3. 4. 5. 6. 7. 8. 9. 30 35 Назва К-сть каналів Кількість електродів 24, 48, 72, 96, 120 "Syscal-Pro" (Iris 10 Instruments, Франція) "SARIS" (SCINTREX, 1 4 Канада) "ARES" (GF Instruments, 1 Max 200 Чехія) "Tetrameter LS" (ABEM 4 (8-12) 64 Instrument AB, Швеція) "MPT DAS1" (Multi-Phase 8 64 LLC, USA) "Омега-48" (ООО "Логис", 10 48 Росія) "СКАЛА-64M" ("Главкомплект-Регион", 64 64 Росія) "Allied Tigre Resistivity System" (Allied Associates 1 32,64,128 Geophysical Inc, USA) "SuperSting R8 IP" (AGI 65 000 Advanced Geoscience Inc., 8 theoretically USA) Режими Маса Вартість роботи Примітки ВЕЗ, ВП 13 кг 70 000 $ ПК, GPS ВЕЗ 8,9 кг 20 000 € ВЕЗ, ВП, 5,9 кг 20 000 € SP ВЕЗ, ВП, 130 000 12 кг SP USD VES, SP, 19 кг IP 30000 ВЕЗ, ВП USD ВЕЗ, ВП, 11 кг ДЕЗ VES VES, IP 6кг 10,2 950 000 кг USD ПК, GPS ПК ПК, GPS ПК Тільки лінійні установки Тільки установки Венера і Шлюмберже ПК Тільки лінійні установки Власне функціональна обмеженість існуючих пристроїв і їх висока вартість, чи не в першу чергу викликані відособленістю комутуючих елементів і схем керування ними. Наприклад, для матриці 8*8 (64 заземлювачі) потрібно 64*4 керуючих сигналів, а отже, і стільки ж з'єднувальних дротів, які повинні йти від схеми керування до вузлових комутаторів. Об'єднання їх дозволяє обійтись двома-трьома інформаційними лініями, по яких і здійснюється керування від персонального комп'ютера! 2 UA 88815 U 5 10 15 20 25 30 35 40 Переваги такої побудови: 1) однорідність структури - система складається з однотипних модулів, кожен з яких містить комутатор на даний вузол та схему керування ним; 2) простота побудови системи - кожен модуль з'єднується з іншими лише сімома лініями чотири системні лінії a, b, m, n та дві-три лінії керування (для інтерфейсу RS-232 це лінія на передачу Тх, на прийом Rx та лінія кульового потенціалу ("земля"); 3) легкість нарощування (розширення) системи. Кількість заземлювачів визначається лише довжиною кодового слова, яка може бути довільною - 8, 16, 24 біт; 4) простота програмного керування вузловими комутаторами; 5) можливість реалізації довільних вимірювальних установок в межах матричного поля заземлювачів; 6) система може бути реалізована як одноканальна, так і багатоканальна. Центральним елементом пристрою електротомографії є комутатор, що дає можливість кожному електроду матричної вимірювальної установки, під'єднаному до відповідного вузла, виконувати одну з чотирьох функцій: 1) струмового електрода А; 2) струмового електрода В; 3) вимірювального (потенціального) електрода М; 4) вимірювального (потенціального) електрода N. Можлива реалізація цього комутатора приведена на Фіг. 8. Ключі К1-К4 комутують лінію заземлювача Z (і, j) на одну з чотирьох ліній (a, b, m або n). Керування ключами здійснюється мікроконтролером uС у відповідності з командами, які передаються по інформаційних лініях І_1 та I_2 (для інтерфейсу І2С це лінії SDA і SCLK, для інтерфейсу RS232C - лінії Rx і Тх). Положення даного комутатора у матриці заземлювачів вимірювальної установки (рядок і та стовпчик j) - адреса вузла - задається перемикачами SW1. До ключів (комутуючих елементів) ставляться досить жорсткі вимоги, а саме: 1) висока комутуюча напруга (до 500-800 В) та струм (до 1-2 А) для ключів ліній а і b K1, K2; 2) низький, а головне стабільний опір ключів у відкритому стані, і високий у закритому; 3) мала контактна різниця потенціалів для ключів ліній m i n K3, K4. Найповніше всім цим вимогам задовольняють старі добрі електромагнітні реле. Технічний результат, що досягається при здійсненні корисної моделі: 1) спрощується побудова апаратури, яка складається з однотипних модулів, що формують однорідну структуру; 2) спрощується системне програмне забезпечення, що реалізує функції керування пристроєм; 3) простота розширення (нарощування) системи; 4) збільшення продуктивності досліджень; 5) здешевлення апаратури; 6) можливість реалізації довільної конфігурації вимірювальної установки в межах матричного поля заземлювачів; 7) можливість реалізації довільного геофізичного методу досліджень геометричних зондувань. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Спосіб побудови пристрою для електрорезистивної томографії (ЕРТ), при якому кожен з його вузлів, на які відображається матриця заземлювачів (електродів), в межах якої реалізується конфігурація тієї чи іншої вимірювальної установки, може виступати як струмовим (А чи В), так і потенціальним (М чи N), який відрізняється тим, що у кожному окремому вузлі вводиться окрема схема керування для управління комутуючими елементами, а кожному вузлу присвоюється унікальна адреса, що задається на етапі конфігурування вимірювальної установки. 3 UA 88815 U 4 UA 88815 U 5 UA 88815 U 6 UA 88815 U 7 UA 88815 U 8 UA 88815 U 9 UA 88815 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюPidvirnyi Oleh Ivanovych, Lukowski Janusz
Автори російськоюПидвирный Олег Иванович
МПК / Мітки
МПК: G01V 3/08
Мітки: електрорезистивної, спосіб, томографії, пристрою, ерт, побудови
Код посилання
<a href="https://ua.patents.su/12-88815-sposib-pobudovi-pristroyu-dlya-elektrorezistivno-tomografi-ert.html" target="_blank" rel="follow" title="База патентів України">Спосіб побудови пристрою для електрорезистивної томографії (ерт)</a>
Спосіб ультразвукової томографії гепатобіліопанкреатодуоденальної зони

Номер патенту: 30677
Опубліковано: 11.03.2008
Автори: Кудрявцева Валентина Євгенівна, Кришень Валерій Павлович, Полюдов Олександр Анатолійович
МПК: A61B 8/00
Мітки: зони, спосіб, гепатобіліопанкреатодуоденальної, томографії, ультразвукової
Формула / Реферат:
Спосіб ультразвукової томографії гепатобіліопанкреатодуоденальної зони, що включає перкутанне сканування зони діагностичної зацікавленості, дослідження показників паренхіми печінки, архітектоніки судин, протоки, механічного впливу конкрементів та визначення патологічних змін, який відрізняється тим, що додатково перед скануванням датчик томографа позиціюють в ділянку правого підребер'я, нижче реберної дуги на 2 см, медіальніше передньої...
Спосіб побудови атенюатора-подільника троцишина

Номер патенту: 100581
Опубліковано: 10.01.2013
Автор: Троцишин Іван Васильович
МПК: G01R 15/00, H02M 3/06, G06G 7/16, G11C 8/00
Мітки: спосіб, побудови, троцишина, атенюатора-подільника
Формула / Реферат:
Спосіб побудови атенюатора-подільника, який полягає у забезпеченні лінійки N послідовно з'єднаних резисторів однакового номіналу, в якій нижній крайній вивід лінійки резисторів підключають до спільного виводу атенюатора-подільника, а усі виводи лінійки, окрім нижнього крайнього, через кодокеровані першим дешифратором ключі приєднують до виходу пристрою, який відрізняється тим, що вхід пристрою через лише N/2 кодокерованих другим дешифратором...
Спосіб побудови цифрової системи керування
Номер патенту: 62021
Опубліковано: 15.12.2003
Автори: Чигирин Олег Трохимович, Маранов Олександр Вікторович, Чигирин Юрій Трохимович
МПК: G06F 11/14
Мітки: керування, цифрової, спосіб, системі, побудови
Формула / Реферат:
Спосіб побудови цифрової системи керування, який засновано на використанні стану багаторозрядного цифрового лічильного каналу, визначенні поточного стану багаторозрядного цифрового лічильного каналу, визначенні прогнозованого стану багаторозрядного цифрового лічильного каналу, визначенні працездатності багаторозрядного цифрового лічильного каналу та формуванні часової послідовності керуючих сигналів, який відрізняється тим, що в ньому...
Спосіб побудови та експлуатації імітатора стрільби і ураження
Номер патенту: 38314
Опубліковано: 25.12.2008
Автори: Семиглазов Володимир Всеволодович, Семиглазов Всеволод Володимирович, Матвієвський Микола Олександрович, Матвієвський Олександр Миколайович
МПК: F41G 3/22, F41G 3/00, F41G 3/26
Мітки: експлуатації, спосіб, імітатора, ураження, стрільби, побудови
Формула / Реферат:
1. Спосіб побудови та експлуатації імітатора стрільби і ураження, на базі використання штатних вогневих засобів учасників тренування, що включає збирання не менше двох комплектів індивідуального обладнання (1), а також комплекту групового обладнання (10), при цьому кожен з комплектів індивідуального обладнання (1) збирають у складі датчика кута місця (2), датчика азимута (3), пристрою визначення власних координат (5), пристрою керування і...
Спосіб побудови навчальних установок для проведення лабораторних робіт
Номер патенту: 91706
Опубліковано: 25.08.2010
Автори: Павлюк Вадим Антонович, Сальніков Володимир Павлович
МПК: G09B 23/00
Мітки: робіт, побудови, установок, лабораторних, проведення, спосіб, навчальних
Формула / Реферат:
Спосіб побудови навчальних установок для проведення лабораторних робіт з фізики та технічних дисциплін, де спостереження за явищами та процесами проводиться за допомогою вимірювальних приладів, згідно з яким спочатку встановлюють перелік параметрів і характеристик, що підлягає визначенню в процесі виконання робіт, вибирають пристрої, які можуть фізично відтворювати потрібні процеси та явища, а також прилади відповідних типів для вимірювання...
Попередній патент: Пристрій для контролю роботи пристрою регулювання під навантаженням силового трансформатора
Наступний патент: Спосіб влаштування пальового фундаменту
Випадковий патент: Спосіб отримання порожнистих виробів з фланцем