Зубчасто-важільний механізм для перетворення гіпоциклічних кривих


Формула / Реферат
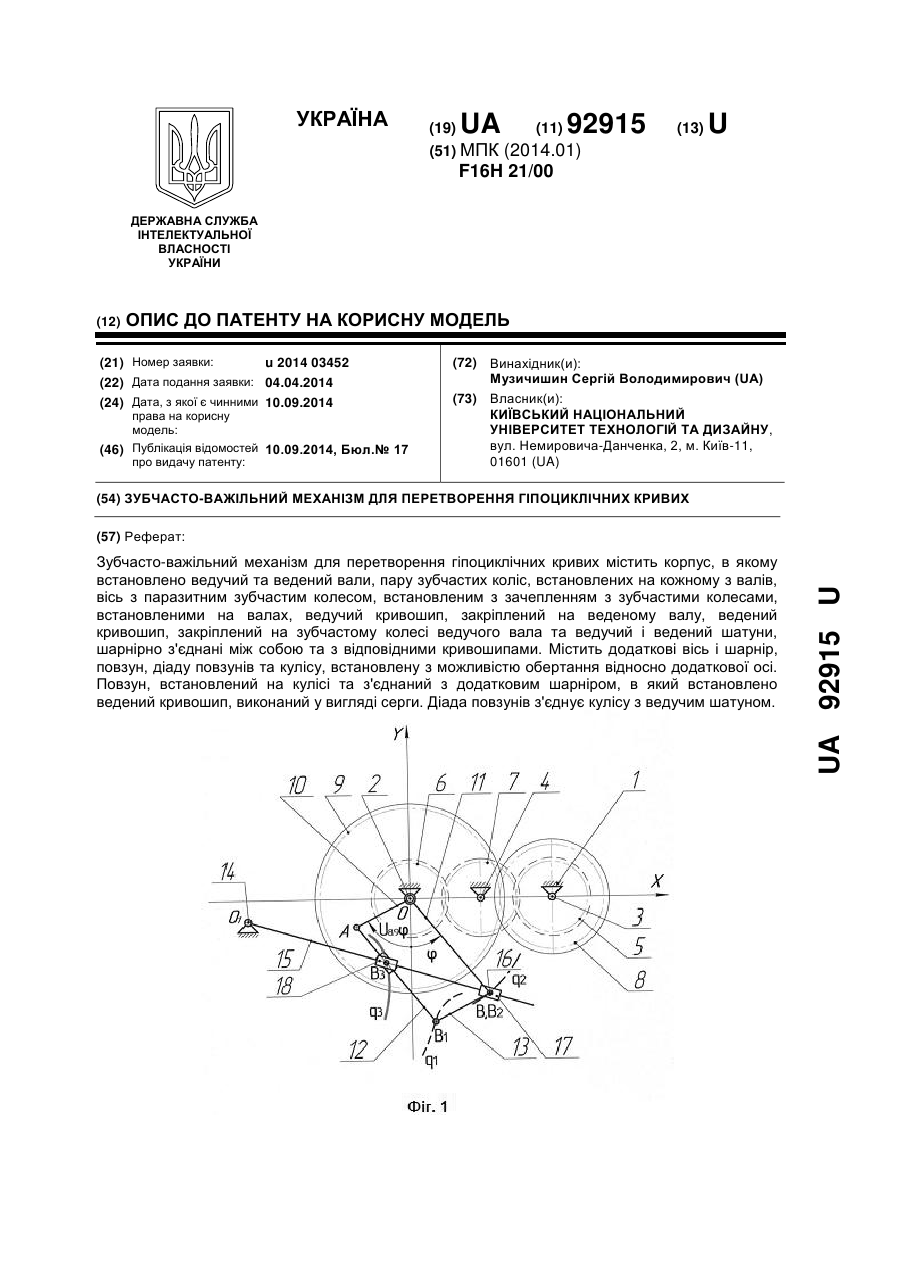
Зубчасто-важільний механізм для перетворення гіпоциклічних кривих, що містить корпус, в якому встановлено ведучий та ведений вали, пару зубчастих коліс, встановлених на кожному з валів, вісь з паразитним зубчастим колесом, встановленим з зачепленням з зубчастими колесами, встановленими на валах, ведучий кривошип, закріплений на веденому валу, ведений кривошип, закріплений на зубчастому колесі ведучого вала та ведучий і ведений шатуни, шарнірно з'єднані між собою та з відповідними кривошипами, який відрізняється тим, що містить додаткові вісь і шарнір, повзун, діаду повзунів та кулісу, встановлену з можливістю обертання відносно додаткової вісі, повзун, встановлений на кулісі та з'єднаний з додатковим шарніром, в який встановлено ведений кривошип, виконаний у вигляді серги, а діада повзунів з'єднує кулісу з ведучим шатуном.
Текст
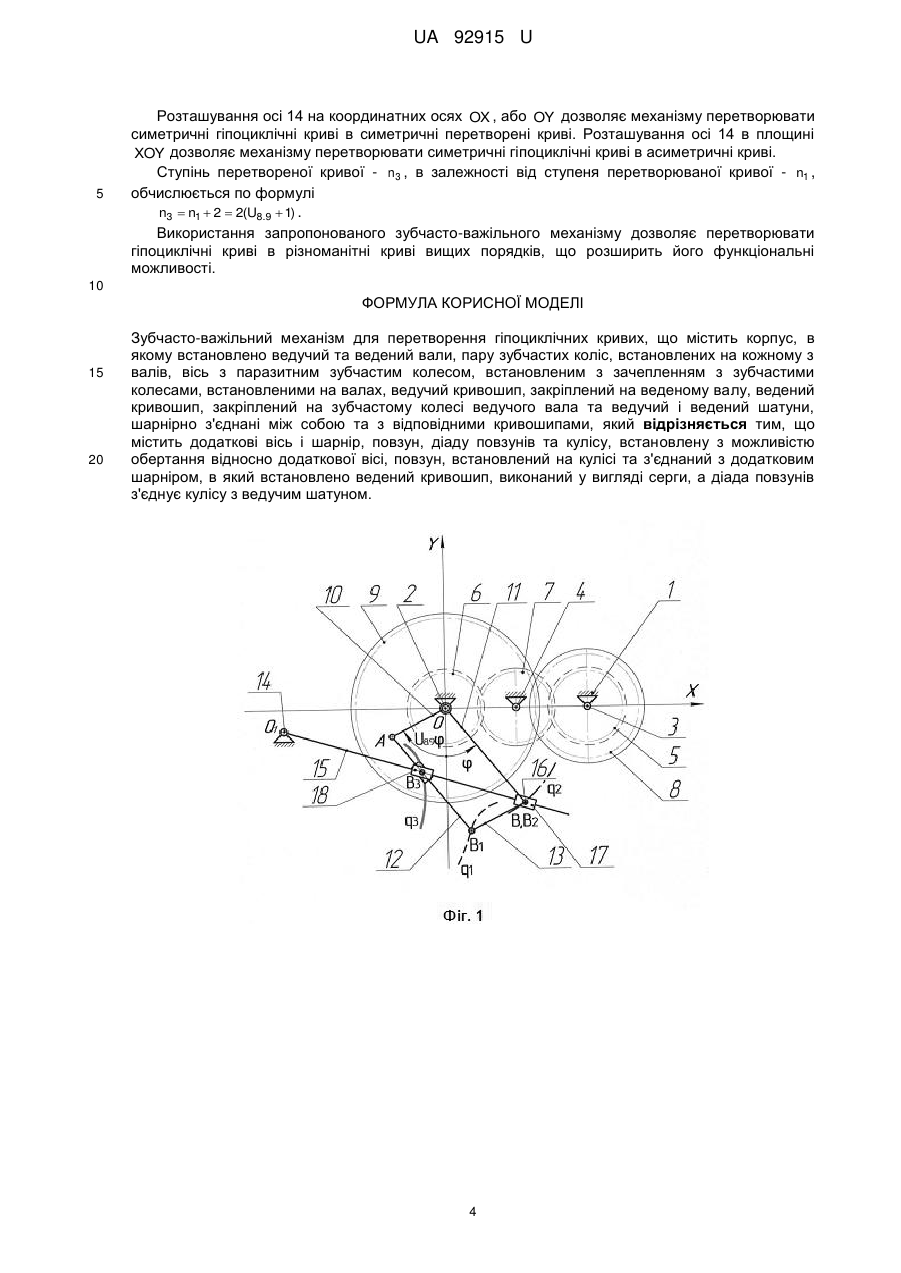
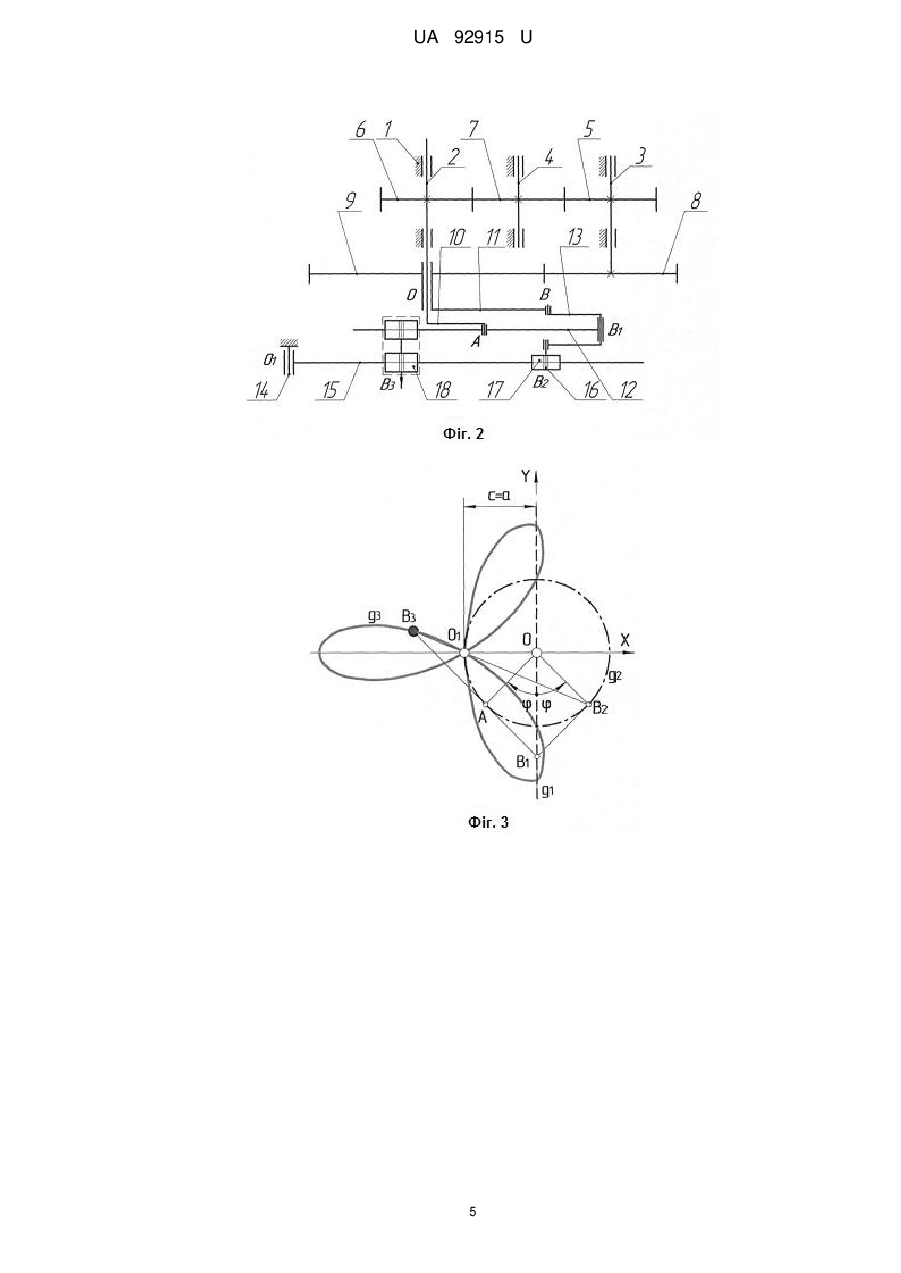
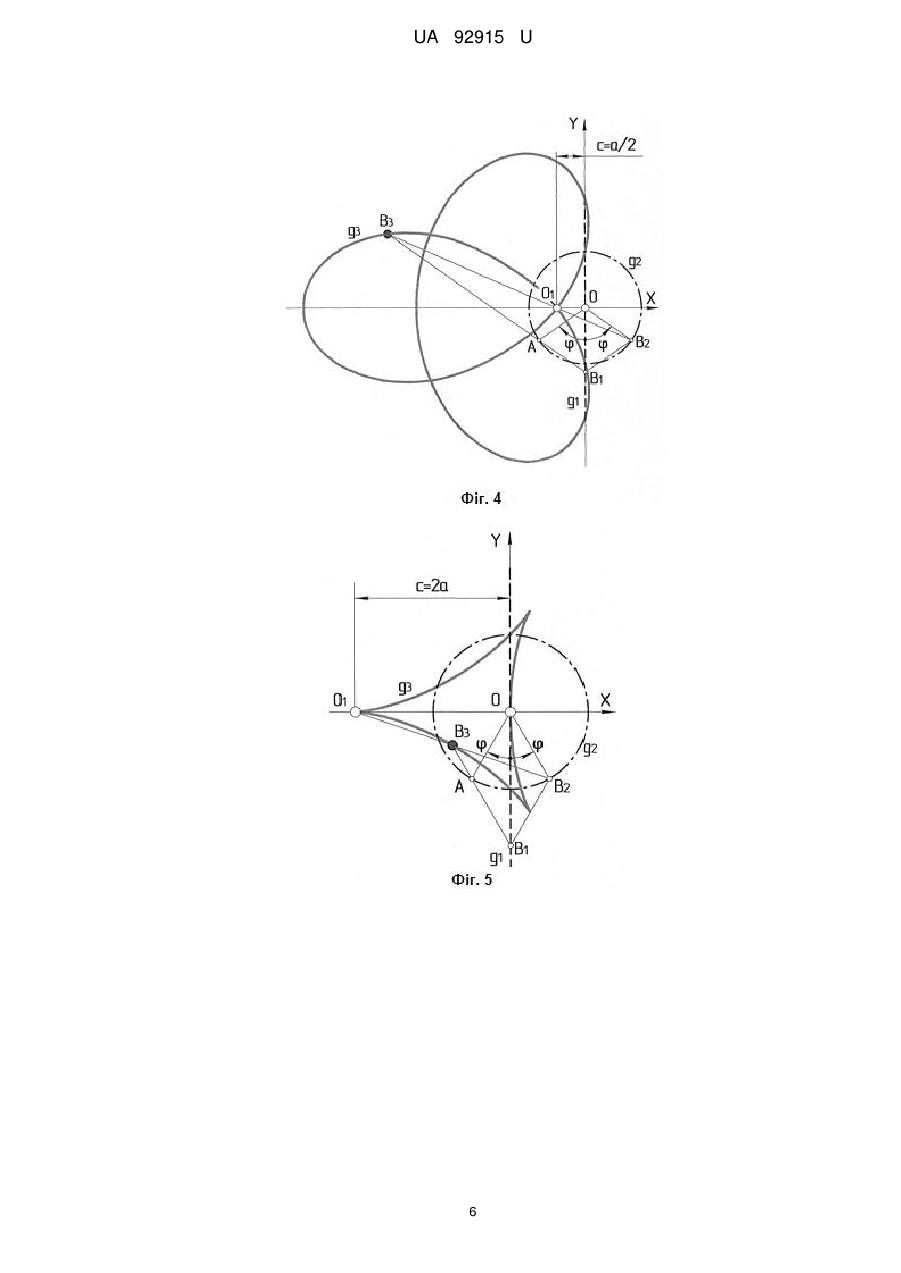
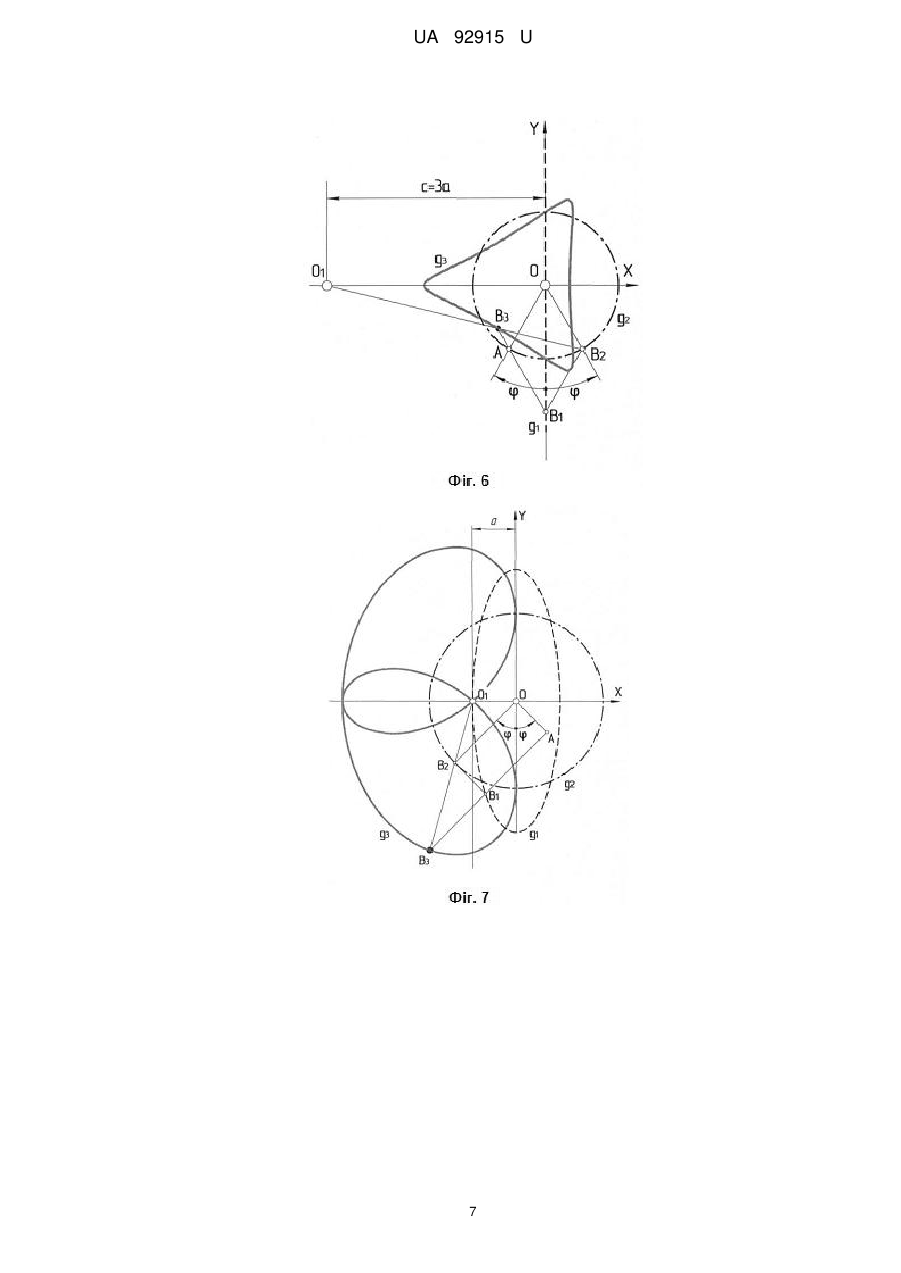
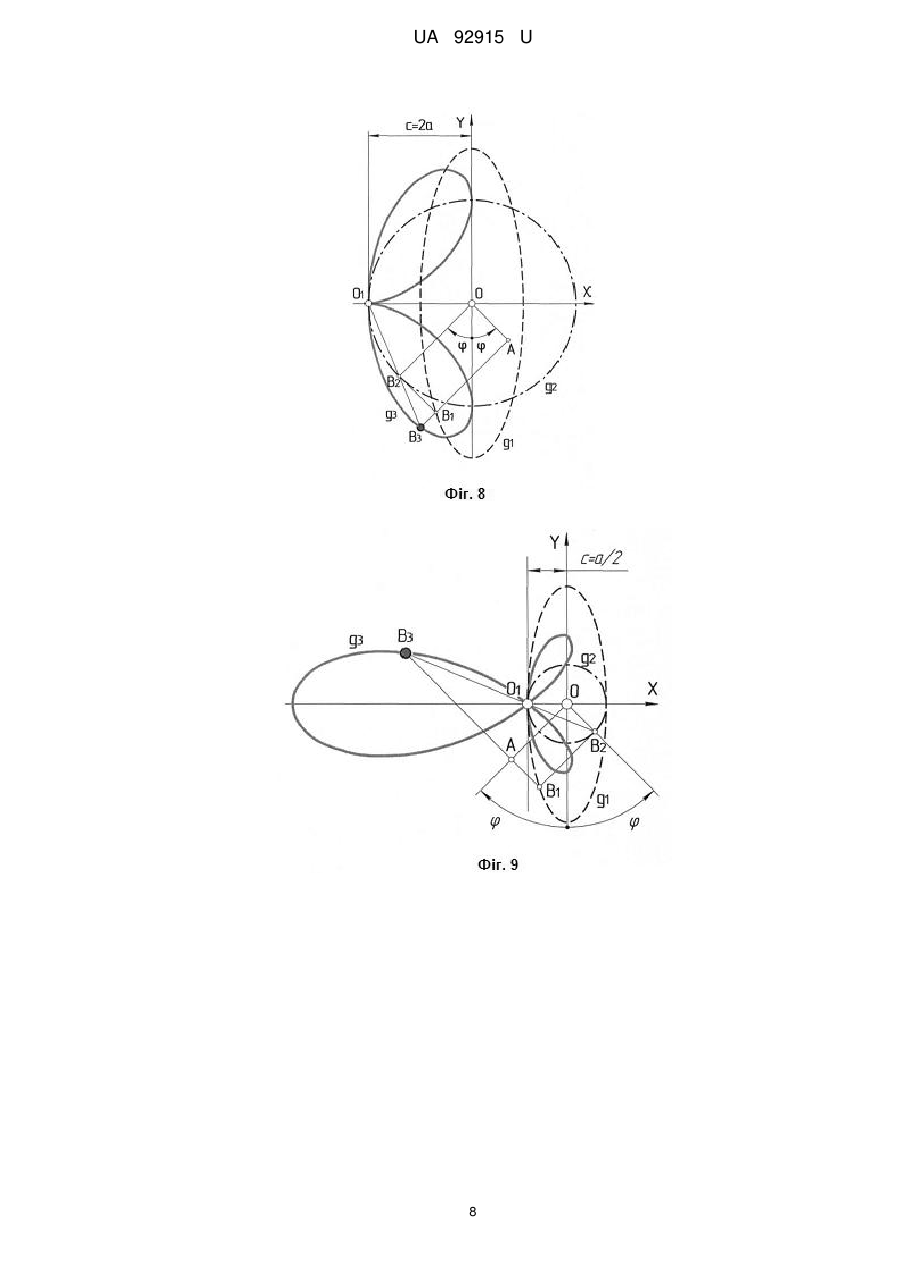
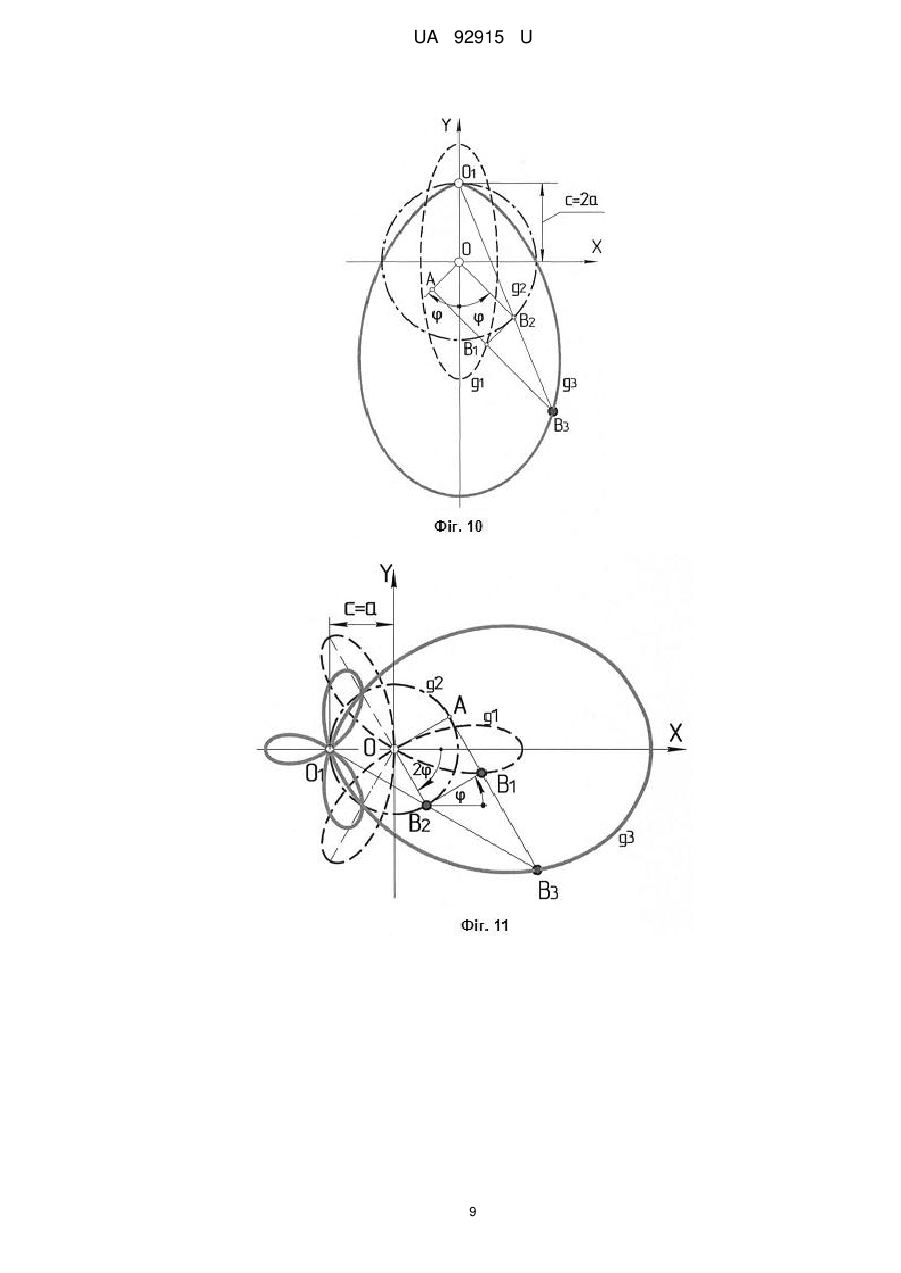
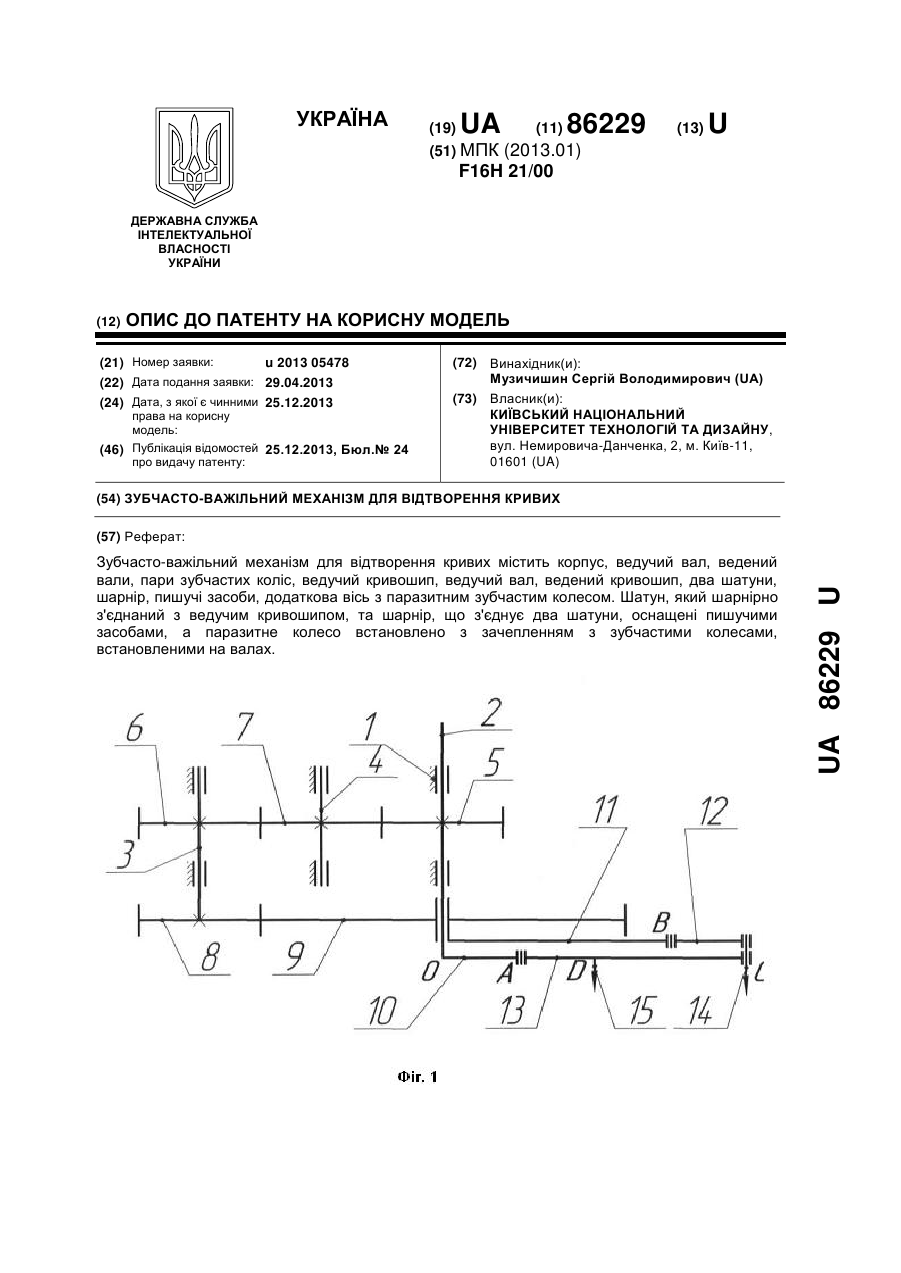
Реферат: UA 92915 U UA 92915 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до зубчасто-важільних механізмів, зокрема для перетворення гіпоциклічних кривих, а також для креслення та розмітки перетворених кривих, та може бути використана в конструкторських бюро заводів і фабрик легкої промисловості та в навчальних цілях у ВНЗах. Відомий зубчасто-важільний механізм для відтворення еліпса, що є гіпоциклоїдою, який містить нерухоме зубчасте колесо, відносно якого обертається колесо-сателіт, та важіль закріплений на колесі-сателіті, а пишучий пристрій, встановлений на важелі, відтворює еліпс (див. Крайнев А.Ф. Словарь - справочник по механизмам. 2-изд. перераб. и доп. - М.: Машиностроение, 1987. - С. 541, рис. б). Зазначений механізм відтворює еліпс по всьому його протягу, але пара зубчастих коліс, що складають планетарну зубчасту передачу, у якої одне з зубчастих коліс має рух в площині, а друге колесо якої має внутрішнє зачеплення. Такий механізм є складним у виготовленні та потребує підвищеної вимоги до співвісності зубчастих коліс, щоб забезпечити точність відтворення кривої. Відомий також зубчасто-важільний механізм для перетворення кривих, що містить корпус, в якому встановлено ведучий та ведений вали, пару зубчастих коліс, встановлених на кожному з валів, вісь з паразитним зубчастим колесом, встановленим з зачепленням з зубчастими колесами, встановленими на валах, ведучий кривошип, закріплений на веденому валу, ведений кривошип, закріплений на зубчастому колесі ведучого вала та ведучий і ведений шатуни, шарнірно з'єднані між собою та з відповідними кривошипами (патент України № 86229, МПК: F16Н 21/00, 2013 р.). В зазначеному механізмі траєкторія, яку відтворює рух шарніра, що з'єднує обидва шатуни, при його налаштуванні, є: еліпси, дельтоїда, астроїда, та інші гіпоциклоїди та гіпоторохоїди, а також криві Гвідо Гранді (рози), такі відомі як три- та чотирипелюсткові рози та інші. Зазначений механізм, при налаштуванні його геометричних та кінематичних параметрів, перетворює два концентрованих кола, але немає можливості перетворювати гіпоциклічні криві, що обмежує його функціональні можливості. В основу корисної моделі поставлена задача створити такий зубчасто-важільний механізм для перетворення кривих, в якому введенням нових елементів та зв'язків, забезпечилась можливість перетворення гіпоциклічних кривих в інших криві, що розширить функціональні можливості пристрою. Поставлена задача вирішується тим, що зубчасто-важільний механізм для перетворення кривих, що містить корпус, в якому встановлено ведучий та ведений вали, пару зубчастих коліс, встановлених на кожному з валів, вісь з паразитним зубчастим колесом, встановленим з зачепленням з зубчастими колесами, встановленими на валах, ведучий кривошип, закріплений на веденому валу, ведений кривошип, закріплений на зубчастому колесі ведучого вала та ведучий і ведений шатуни, шарнірно з'єднані між собою та з відповідними кривошипами, згідно з корисною моделлю, оснащений додатковими віссю і шарніром, повзуном, діадою повзунів та кулісою, встановленою з можливістю обертання відносно додаткової осі, повзун, встановлений на кулісі та з'єднаний з додатковим шарніром, в який встановлено ведений кривошип, виконаний у вигляді серги, а діада повзунів з'єднує кулісу з ведучим шатуном. Оснащення механізму кулісою, яка має можливість обертатися відносно додаткової осі, та встановлення на ній повзуна, який з'єднаний з додатковим шарніром, дає можливість кінематично пов'язати кулісу з ведучим шатуном діадою повзунів, що забезпечить перетворення гіпоциклічних кривих, які відтворює рух шарніра, що з'єднує ведучий та ведений шатуни, крім того виконання веденого шатуна сергою забезпечує рух діади повзунів при повному оберті кривошипів безупинно, що розширює функціональні можливості механізму. Корисна модель представлена на кресленнях, де фіг. 1 - кінематична схема механізму, а на фіг. 2 - розташування зубчастих коліс механізму, розташування осі обертання куліси, та кінематичний зв'язок куліси з повзуном, розташованого на ведучому шатуні. На фіг. 3 - 12 показані схеми налаштування геометричних та кінематичних параметрів механізму для перетворення деяких відомих гіпоциклічних кривих. Механізм містить корпус 1, в якому шарнірно встановлені ведучий вал 2, ведений вал 3 та вісь 4, на яких жорстко закріплені відповідно зубчасті колеса 5, 6 та паразитне колесо 7, які зчеплені між собою. Ведений вал 3 містить жорстко закріплене на ньому зубчасте колесо 8, яке кінематично пов'язане з колесом 9, яке розташоване на валу ведучого вала 2 з можливістю обертання відносно нього, передаточне відношення цих коліс U8.9 z8 . До ведучого вала 2 z9 закріплено ведучий кривошип 10, а до зубчастого колеса 9 закріплено ведений кривошип 11. Ведучий кривошип 10 та ведений кривошип 11 шарнірно з'єднані парою, шарнірно з'єднаних між собою, відповідних шатунів: ведучим - 12 та веденим - 13 (т.B1) . Ведений шатун 13 виконано сергою, тобто має додатковий шатун з шарніром, вісь якого збігається з віссю шарніра, що 1 UA 92915 U з'єднує ведучий 12 та ведений 13 шатуни. При цьому довжини веденого кривошипу 11 та ведучого шатуна 12 однакові (OA BB1 b) , a розміри ведучого кривошипу 10 та веденого 5 10 шатуна 13 (OB AB1 a) . Другу вісь 14 (т.O1( xc , yc )) на відстані (OO1 c) від центра обертання кривошипів (т.O) , та відносно якої має можливість обертатися куліса 15. Шарнір 16, розташований на осі веденого шатуна 13, встановлено в повзун 17. На кулісі 15 встановлено повзун 17. Ведучий шатун 12 та куліса 15 з'єднані між собою діадою повзунів 18. Механізм для перетворення кривих працює наступним чином: При обертанні ведучого вала 2, завдяки зачепленню зубчастих коліс 5, 6,та 7 рух через ведений вал 3 передається зубчастим колесам 8 та 9, та тим самим передається кривошипам: ведучому - 10 та веденому - 11, які обертаються в протилежні сторони з передаточним відношенням U11 .10 11 U8.9 та шарнірно 10 з'єднаним: ведучому - 12 і веденому - 13 шатунам. Шарнір (т.B1) , що з'єднує ведучий шатун 12 та ведений шатун 13, рухається по гіпоциклічній кривій - q1 , визначеною рівнянням F( x1, y1) . При цьому шарнір 16 (т.B2 ) рухається по кривій q2( x2, y2 ) , що є колом з радіусом - r b . Куліса 15 приводиться до руху повзуном 17, в який вона 15 20 вставлена. Вісь діади повзунів 18 т. B3 , відтворює криву - q3 , визначену рівнянням Ф( x3, y3 ) . Таким чином, вказаний кінематичний ланцюг перетворює криву F( x1, y1) в криву Ф( x3, y3 ) . З цього виходить, що механізм для перетворення кривих встановлює відповідності між плоскими полями точок B1 та B3 (П1 П3 ) . Аналітична залежність координат перетвореної точки B3 від координат перетворюваної точки B1 залежить від передаточного відношення зубчастих коліс - U8.9 , та геометричних параметрів механізму - a,b, c . Передаточне відношення зубчастих коліс - U8.9 1 : При даному передаточному відношенні у випадку, коли геометричні параметри механізму: b a гіпоциклічна крива - q1 вироджується в відрізок прямої з параметрами ( x1 0, y1max 2b) . 25 Та коли точка O1 розташована на координатній осі координатами мають вигляд: y3 y1 1 2 4b2 y12 ; (1) c 1 2 2 x3 4b y1 1 2 30 35 OX( xc c, yc 0) , залежності між 4b2 y12 2 . (2) c На фіг. 3 показано, що при параметрах: b a та c a відрізок прямої перетворюється в трипелюсткову розу по рівнянню: (( x a)2 y 2 )2 2a( x a)( 3y 2 ( x a)2 ) 0 . (3) На фіг. 4 показано, що при параметрах: b a та c a трипелюсткова роза вироджується в збільшені гіпоторохоїди, на прикладі c 0.5a . На фіг. 5 показано, що при параметрах: b a та c 2a відрізок прямої перетворюється в криву Штейнера (дельтоїду) по рівнянню: 9 2 27 4 a (( x a)2 y 2 )2 a 0 . (4) 2 16 На фіг. 6 показано, що при параметрах: b a та c 2a крива Штейнера (дельтоїда) вироджується в скорочені гіпоторохоїди, на прикладі c 3a . (( x a)2 y 2 )2 4a( x a)( 3y 2 ( x a)2 ) При даному передаточному відношенні у випадку, коли геометричні параметри механізму: b a гіпоциклічна крива - q1 є еліпс, який визначається рівнянням: 40 x12 y12 1 , (5) d2 де: e b a , d b a e 2 Аналітична залежність координат перетвореної точки B3 від координат перетворюваної точки B1 , коли точка O1 розташована на координатній осі OX( xc c, yc 0) , мають вигляд y3 y1 b 2b 2 d y12 ; (6) c cd cd 2 UA 92915 U x3 5 10 1 c 2 b2 b e2 x12 c e 2b x . (7) e 1 На фіг. 7 показано, що при параметрах: b 2a та c a , еліпс перетворюється в каприкорніоїду по рівнянню: a2y2 (( x a)2 y2 ) 3a(ay ( x a)2 y2 ) 0 . (8) На фіг. 8 показано, що при параметрах: b 2a та c 2a , еліпс перетворюється в подвійний прямий лист по рівнянню: (( x 2a)2 y2 )2 8ay2 ( x 2a) 0 . (9) На фіг. 9 показано, що при параметрах: b a та c a , еліпс перетворюється в прямий трилисник, на прикладі b 0,5a та c 0,5a , по рівнянню: (( x 4 / 3a)2 y2 )2 2a( x 4 / 3a)( y2 ( x 4 / 3a)2 ) 0 (10) На фіг. 10 показано, що при параметрах: b 2a та c 2a , а точка O1 при цьому розташована на координатній осі OY( xc 0, yc c ) - еліпс перетворюється в прямий однолисник по рівнянню: ( x 2 ( y 2a)2 )2 8a( y 2a)2 . (11) 15 Передаточне відношення зубчастих коліс - U8.9 2 : Аналітична залежність координат перетвореної точки B3 від координат перетворюваної точки B1 , колиточка O1 розташована на координатній осі OX( xc c, yc 0) , залежності між координатами мають вигляд: b2 A 2 ( x1 c ) y1 A ; (12) c A 2 2 x3 c( b A (c x1) Ay1) y1 x1 ; (13) 2 2 b A y3 20 де: A 1 a2 2 . k 2x1 4k( x1 b) k ; k 2 2b На фіг. 11, як приклад перетворення гіпоциклічної кривої - q1 , показано, що при U8.9 2 , та при параметрах: b a та c a , трьохпелюсткова роза перетворюється на криву під назвою скоробей: (( x a)2 y 2 ) ( x a)2 y 2 a( x a)2 2 2 2 25a(( x a) y ) (14) 25 На фіг. 12, як приклад перетворення гіпоциклічної кривої - q1 , показано, що при U8.9 2 , та при параметрах: b a та c a , трипелюсткова роза передвоюється в криву з чотирма гіперболічними гілками, вузловою точкою та двома точками дотику, та симетричною відносно координатній осі OX , на прикладі c 2a . Для обчислення аналітичних залежностей координат перетвореної точки B3 від координат 30 перетворюваної точки B1 , для цілого передаточного відношення зубчастих коліс - U8.9 (див. фіг. 1), необхідно використовувати наступні рівняння: y3 yc y 2 yc ; (15) xc x3 xc x 2 y 3 y1 y 2 (16) x 3 x1 x 2 x2 b cos( U8.9) ; y2 b sin(U8.9) ; (17) 35 x1 x2 a cos( ) ; y1 y2 a sin() ; (18) де: 2 cos( U8.9 ) cos U8.9 CU 4 CU 8. 9 cos U8.9 1 cos U8.9 3 8.9 cos U8.9 2 sin 2 6 cos U8.9 4 sin 4 CU sin(U8.9 ) C1 U8.9 3 CU 8.9 8. 9 cos U8.9 6 sin 6 ...; (19) sin 5 sin 3 CU 8.9 cos U8.9 5 sin 5 ... 3 . (20) UA 92915 U 5 Розташування осі 14 на координатних осях OX , або OY дозволяє механізму перетворювати симетричні гіпоциклічні криві в симетричні перетворені криві. Розташування осі 14 в площині XOY дозволяє механізму перетворювати симетричні гіпоциклічні криві в асиметричні криві. Ступінь перетвореної кривої - n3 , в залежності від ступеня перетворюваної кривої - n1 , обчислюється по формулі n3 n1 2 2(U8.9 1) . Використання запропонованого зубчасто-важільного механізму дозволяє перетворювати гіпоциклічні криві в різноманітні криві вищих порядків, що розширить його функціональні можливості. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Зубчасто-важільний механізм для перетворення гіпоциклічних кривих, що містить корпус, в якому встановлено ведучий та ведений вали, пару зубчастих коліс, встановлених на кожному з валів, вісь з паразитним зубчастим колесом, встановленим з зачепленням з зубчастими колесами, встановленими на валах, ведучий кривошип, закріплений на веденому валу, ведений кривошип, закріплений на зубчастому колесі ведучого вала та ведучий і ведений шатуни, шарнірно з'єднані між собою та з відповідними кривошипами, який відрізняється тим, що містить додаткові вісь і шарнір, повзун, діаду повзунів та кулісу, встановлену з можливістю обертання відносно додаткової вісі, повзун, встановлений на кулісі та з'єднаний з додатковим шарніром, в який встановлено ведений кривошип, виконаний у вигляді серги, а діада повзунів з'єднує кулісу з ведучим шатуном. 4 UA 92915 U 5 UA 92915 U 6 UA 92915 U 7 UA 92915 U 8 UA 92915 U 9 UA 92915 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюMakatiora Dmytro Anatoliiovych
Автори російськоюМакатера Дмитрий Анатольевич
МПК / Мітки
МПК: F16H 21/00
Мітки: зубчасто-важільний, кривих, гіпоциклічних, перетворення, механізм
Код посилання
<a href="https://ua.patents.su/12-92915-zubchasto-vazhilnijj-mekhanizm-dlya-peretvorennya-gipociklichnikh-krivikh.html" target="_blank" rel="follow" title="База патентів України">Зубчасто-важільний механізм для перетворення гіпоциклічних кривих</a>
Зубчасто-важільний механізм для відтворення кривих
Номер патенту: 86229
Опубліковано: 25.12.2013
Автор: Музичишин Сергій Володимирович
МПК: F16H 21/00
Мітки: відтворення, механізм, кривих, зубчасто-важільний
Формула / Реферат:
1. Зубчасто-важільний механізм для відтворення кривих, що містить корпус, в якому встановлено ведучий та ведений вали, на кожному з яких встановлено пару зубчастих коліс, в кожному по одному колесу закріплено жорстко та з їх зачепленням між собою, ведучий кривошип закріплений на ведучому валу, ведений кривошип закріплений з зубчастим колесом ведучого вала, два шатуни, з'єднані між собою за допомогою шарніра і з відповідними кривошипами, та...
Зубчасто-важільний механізм з зупинкою веденої ланки
Номер патенту: 90130
Опубліковано: 12.05.2014
Автори: Кошель Сергій Олександрович, Музичишин Сергій Володимирович
МПК: F16H 21/00
Мітки: зупинкою, зубчасто-важільний, механізм, веденої, ланки
Формула / Реферат:
Зубчасто-важільний механізм з зупинкою веденої ланки, що містить корпус, в якому закріплена напрямна та встановлено вісь, ведучий та ведений вали, на кожному з яких встановлено пару зубчастих коліс, в кожній по одному колесу закріплено жорстко та з їх зачепленням між собою, паразитне зубчасте колесо встановлене на осі з зачепленням з зубчастими колесами, ведучий кривошип, закріплений на веденому валу, ведений кривошип, закріплений на...
Зубчасто-важільний механізм з зупинкою вихідної ланки
Номер патенту: 83211
Опубліковано: 27.08.2013
Автори: Кошель Сергій Олександрович, Музичишин Сергій Володимирович
МПК: F16H 21/00
Мітки: вихідної, ланки, зупинкою, механізм, зубчасто-важільний
Формула / Реферат:
1. Зубчасто-важільний механізм з зупинкою вихідної ланки, що містить корпус, в якому встановлені ведучий та ведений вали, на кожному з яких встановлена пара зубчастих коліс, в кожній по одному колесу закріплено жорстко та з їх зачепленням між собою, ведучий кривошип, закріплений на веденому валу, ведений кривошип, закріплений з зубчастим колесом ведучого вала, та два шатуни, шарнірно з'єднаних між собою і з відповідними кривошипами, який...
Регульований зубчасто-важільний механізм

Номер патенту: 31037
Опубліковано: 25.03.2008
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович
МПК: F16H 29/00
Мітки: зубчасто-важільний, механізм, регульованій
Формула / Реферат:
Регульований зубчасто-важільний механізм, що містить ведучий та ведений вали, сателіти, центральне колесо, водило, шатуни, кривошипи, вихідну ланку, який відрізняється тим, що вихідна ланка складається з циліндричних стрижнів і фланця, що має циліндричні пази і співвісний з ведучим валом отвір, у якому встановлений шток, на одному кінці якого рухомо встановлена втулка, до якої одним кінцем шарнірно кріпляться важелі однакової довжини, інший...
Зубчасто-важільний механізм поступального переміщення об’єкта

Номер патенту: 38996
Опубліковано: 26.01.2009
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК: F16H 21/00
Мітки: переміщення, поступального, механізм, зубчасто-важільний, об'єкта
Формула / Реферат:
Зубчасто-важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатуни, об'єкт, що утворює шарнірні з'єднання із шатунами, який відрізняється тим, що об'єкт одним кінцем шарнірно з'єднаний із шатуном кривошипно-коромислового механізму, а іншим кінцем шарнірно з'єднаний з іншим шатуном, що утворює шарнірне з'єднання з важелем, жорстко закріпленим з зубчастим колесом, встановленим на вал шарнірного...
Попередній патент: Антиоксидантний та імуномодулюючий препарат “селцивіт”
Наступний патент: Привід основов’язальної машини
Випадковий патент: Спосіб інтенсифікації теплопередачі в системі холодоносій (вода)-стінка теплообмінника-молоко