Ультразвуковий рівнемір
Формула / Реферат
1. Ультразвуковий рівнемір, що містить циліндричний суцільний або порожнистий хвилевід, вертикально встановлений в ємність, нижній кінець якого занурений в рідину, п'єзоелектричний елемент, який встановлений на верхньому кінці незануреної частини хвилеводу, засіб електронної обробки, який містить фазовий детектор, керований генератор частоти, інтегруючий підсилювач для підстроювання частоти керованого генератора, пристрій перетворення вихідного сигналу, який відрізняється тим, що між п'єзоелектричним елементом і рідиною, на відстані, яка перевищує мертву зону, змінений переріз хвилеводу для створення опорної хвилі шляхом відбиття частини прямої зондувальної хвилі, засіб електронної обробки додатково містить перший та другий підсилювачі, стробовані введеним мікроконтролером, причому для масштабування підсилювачі виконані з керованим коефіцієнтом підсилення, вихід першого стробованого підсилювача підключений до п'єзоелектричного елемента, а вхід до першого виходу керованого генератора, вхід другого стробованого підсилювача підключений до п'єзоелектричного елемента, а вихід до входів фазового і пікового детекторів, до другого входу фазового детектора підключений другий вихід керованого генератора частоти, а, крім того, шина управління мікроконтролера підключена до першого і другого стробованих підсилювачів та до керованого генератора частоти, при цьому вихід фазового детектора підключений до входу вимірювання мікроконтролера, вихід пікового детектора підключений до входу аналого-цифрового перетворювача мікроконтролера для обчислення рівня рідини по почергово виміряних значеннях фаз та інтенсивності опорної та зворотної зондувальної хвиль, крім того, вимірювання фаз здійснюють з підстроюванням частоти збудження до значення резонансної частоти передавача, а вимірювання інтенсивності на фіксованій частоті шляхом масштабування зміною коефіцієнтів підсилення першого та другого підсилювачів, причому вихід мікроконтролера підключений до пристрою перетворення вихідного сигналу.
2. Ультразвуковий рівнемір за п. 1, який відрізняється тим, що на верхній частині хвилеводу встановлений температурний датчик для коригування вимірюваних значень рівня за параметрами рідини.
Текст
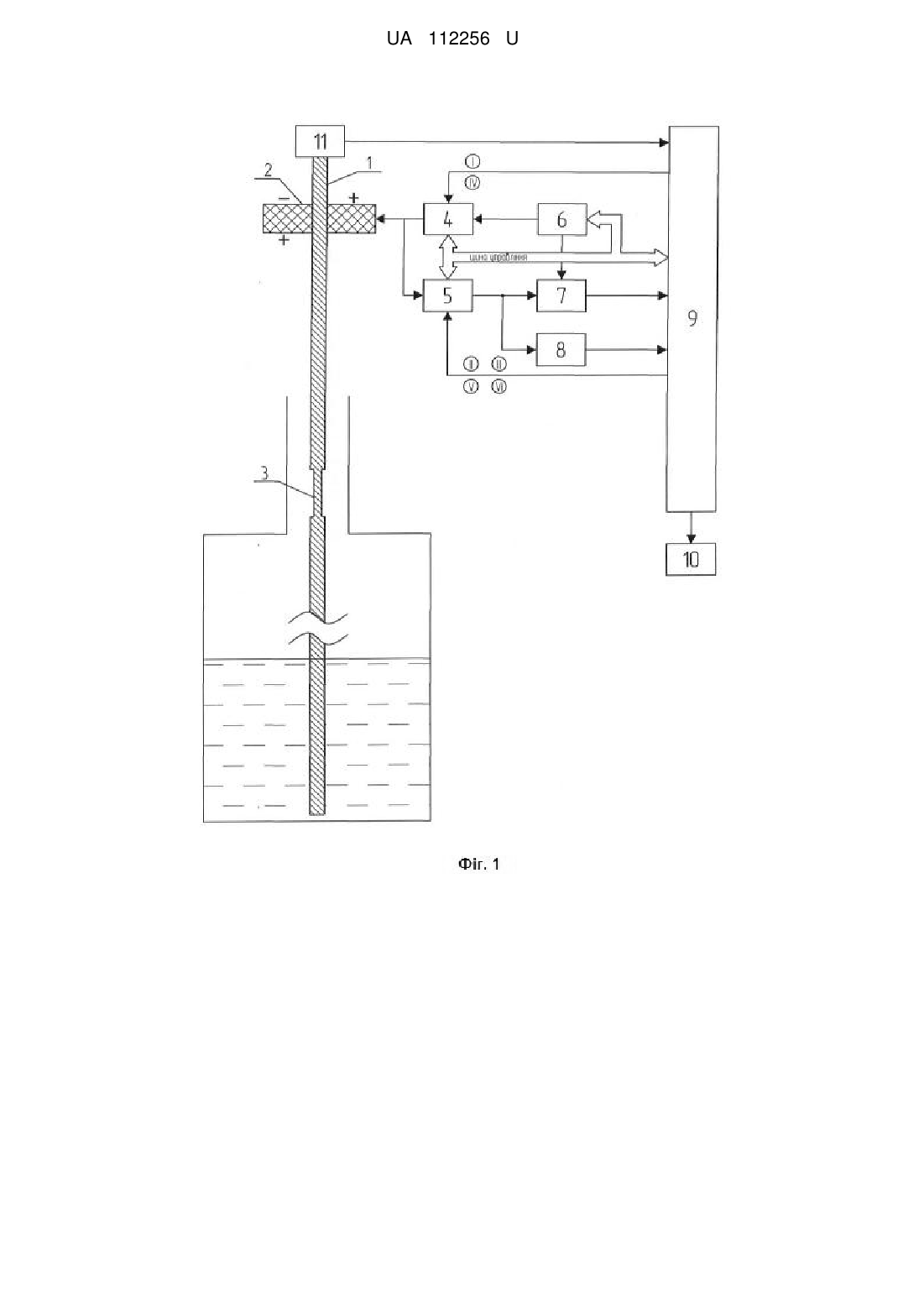
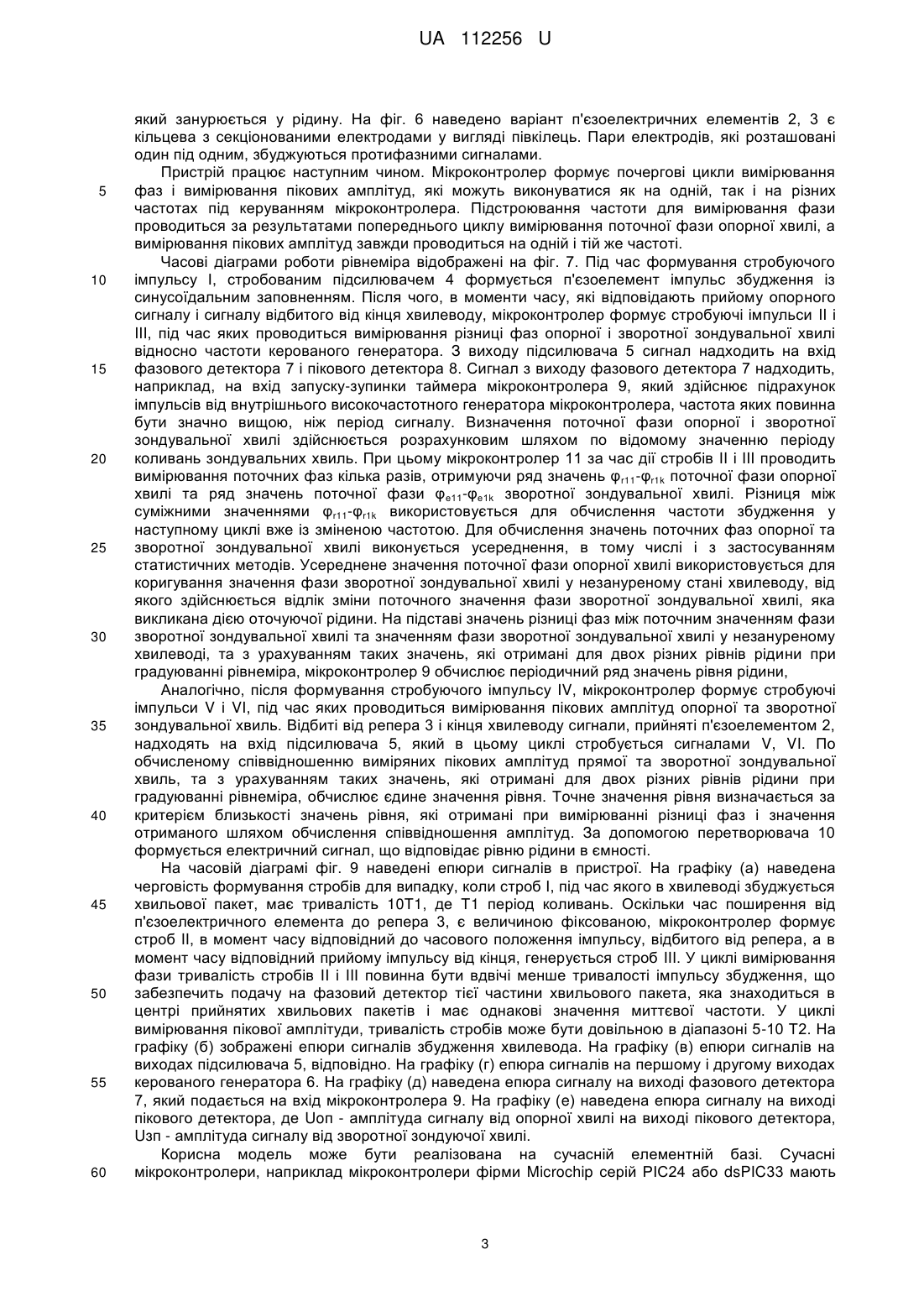
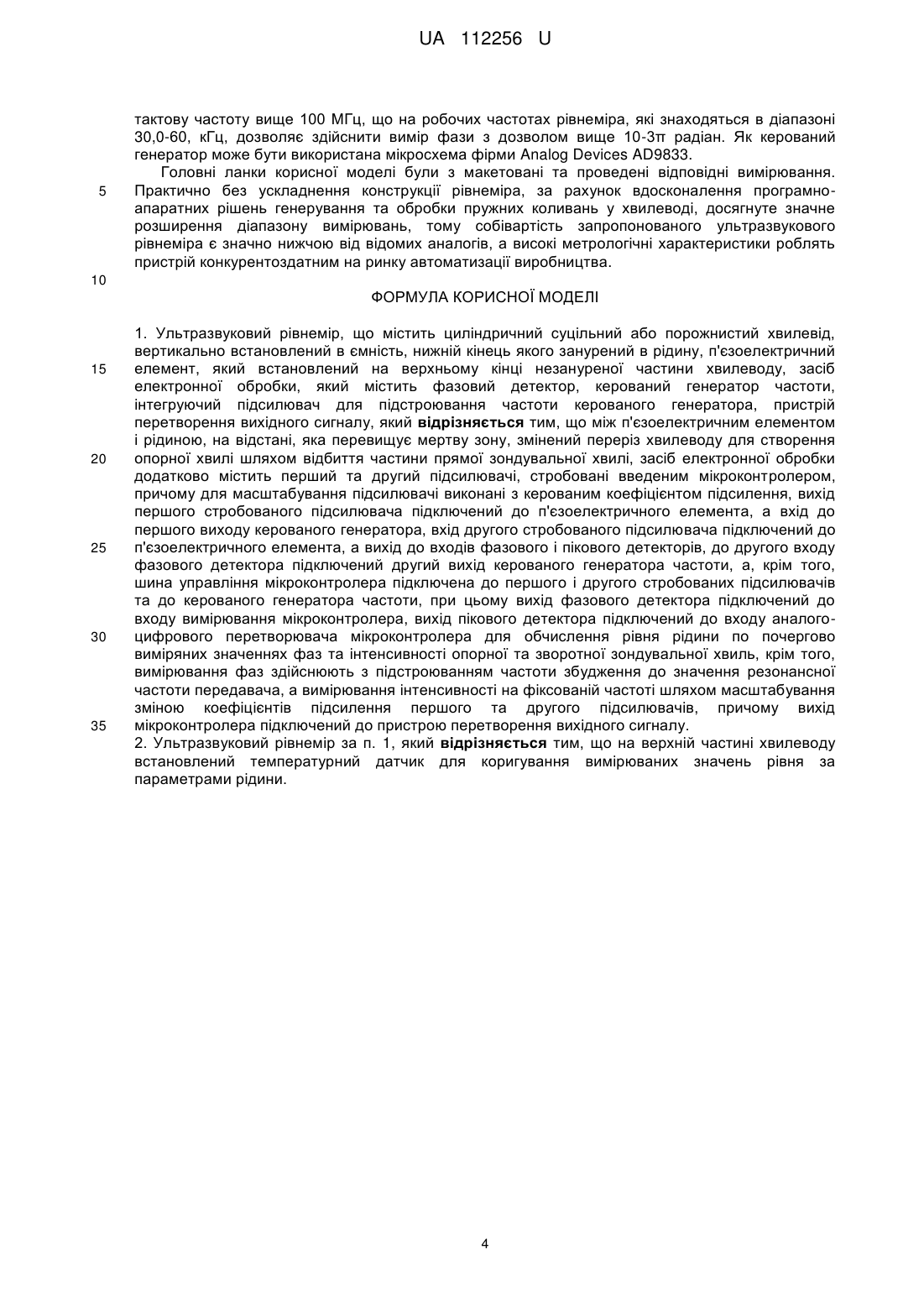
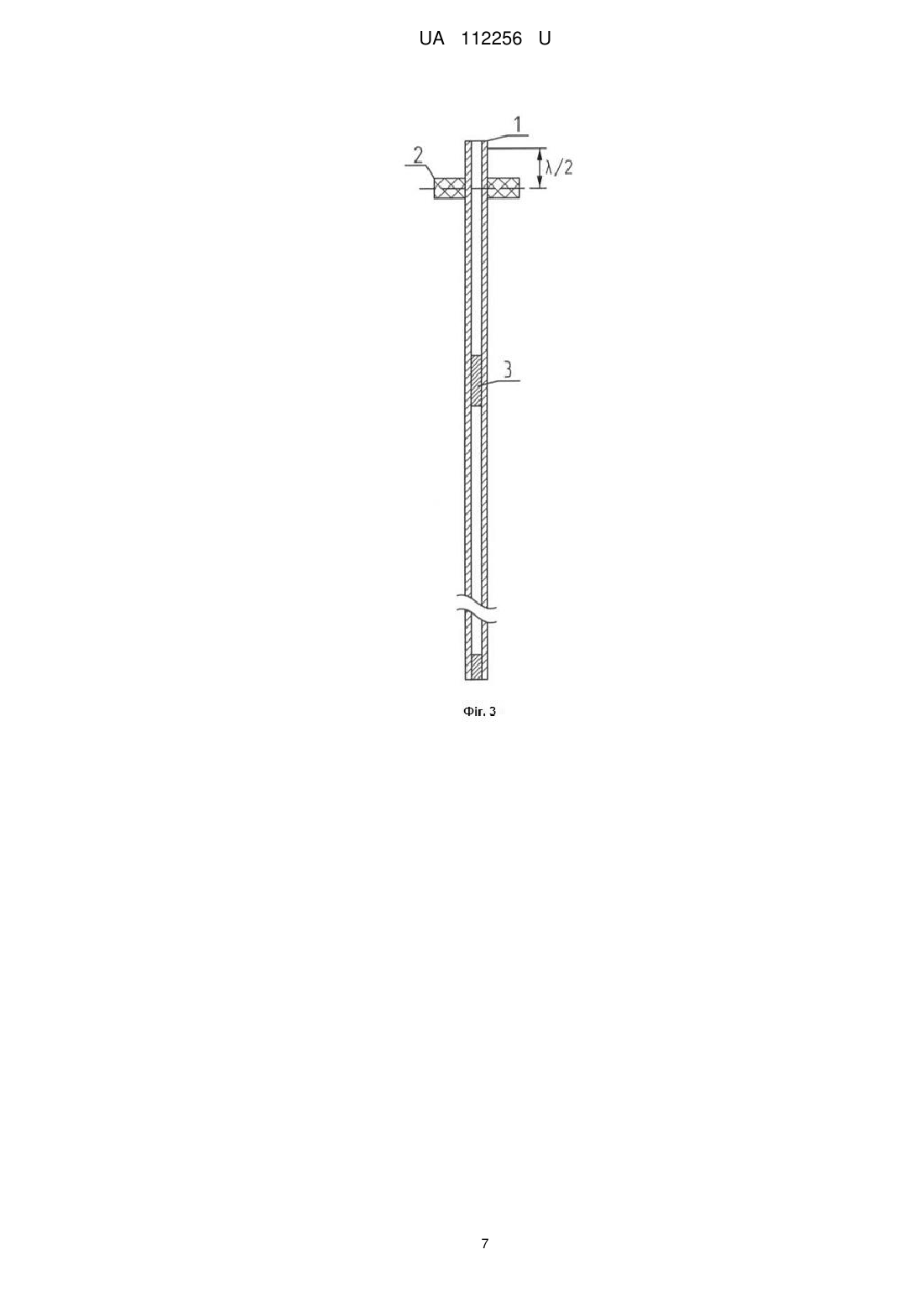
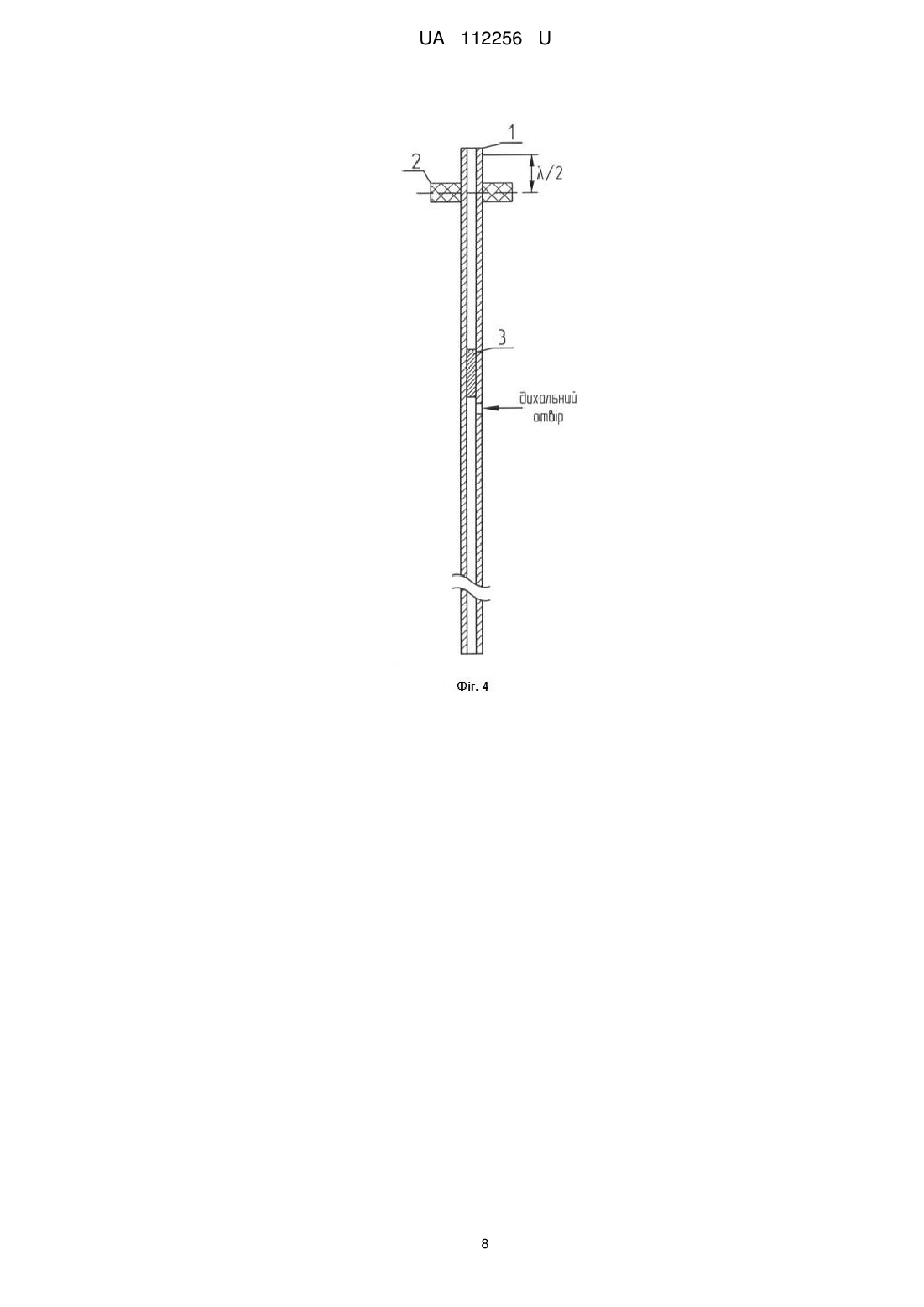
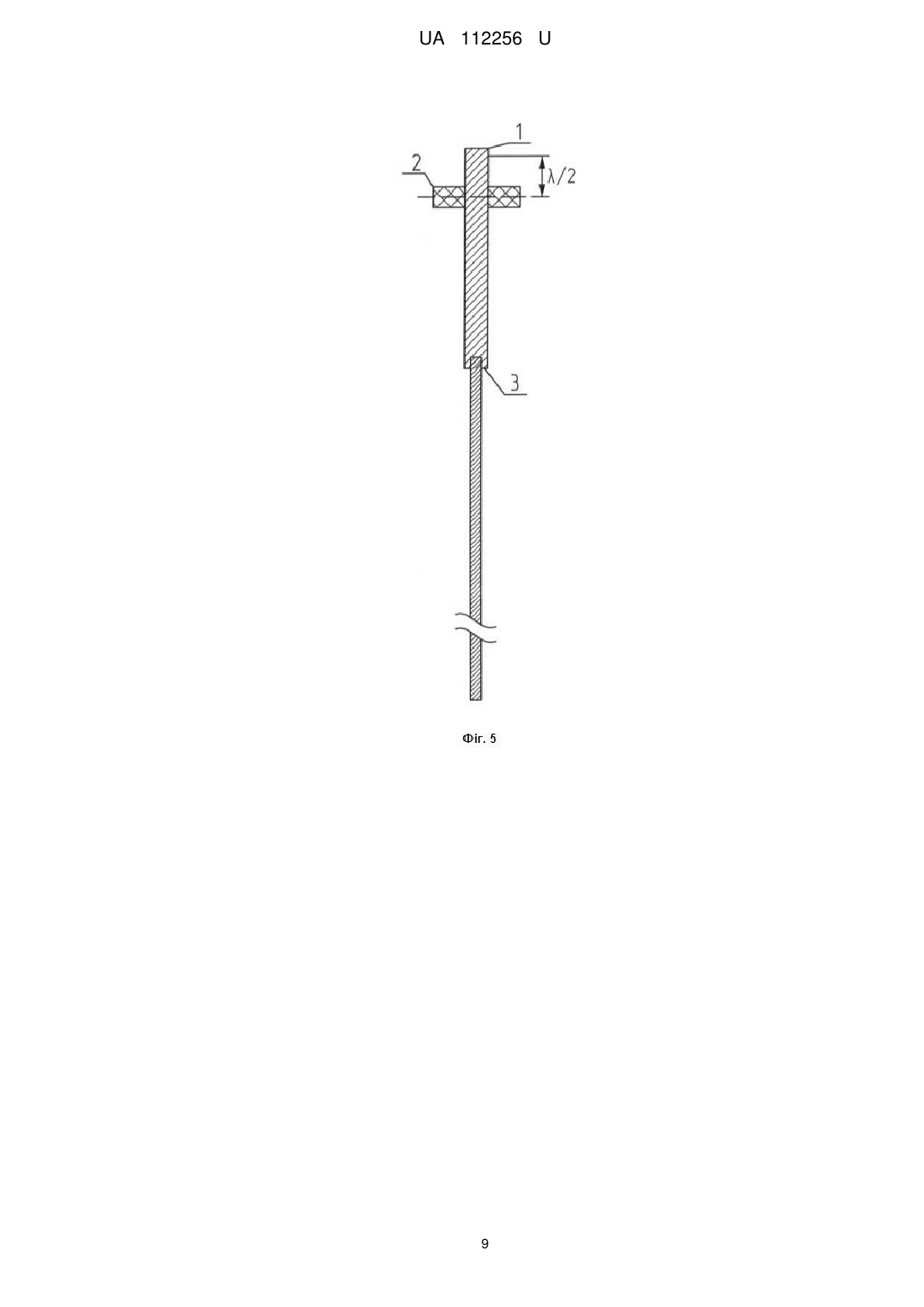
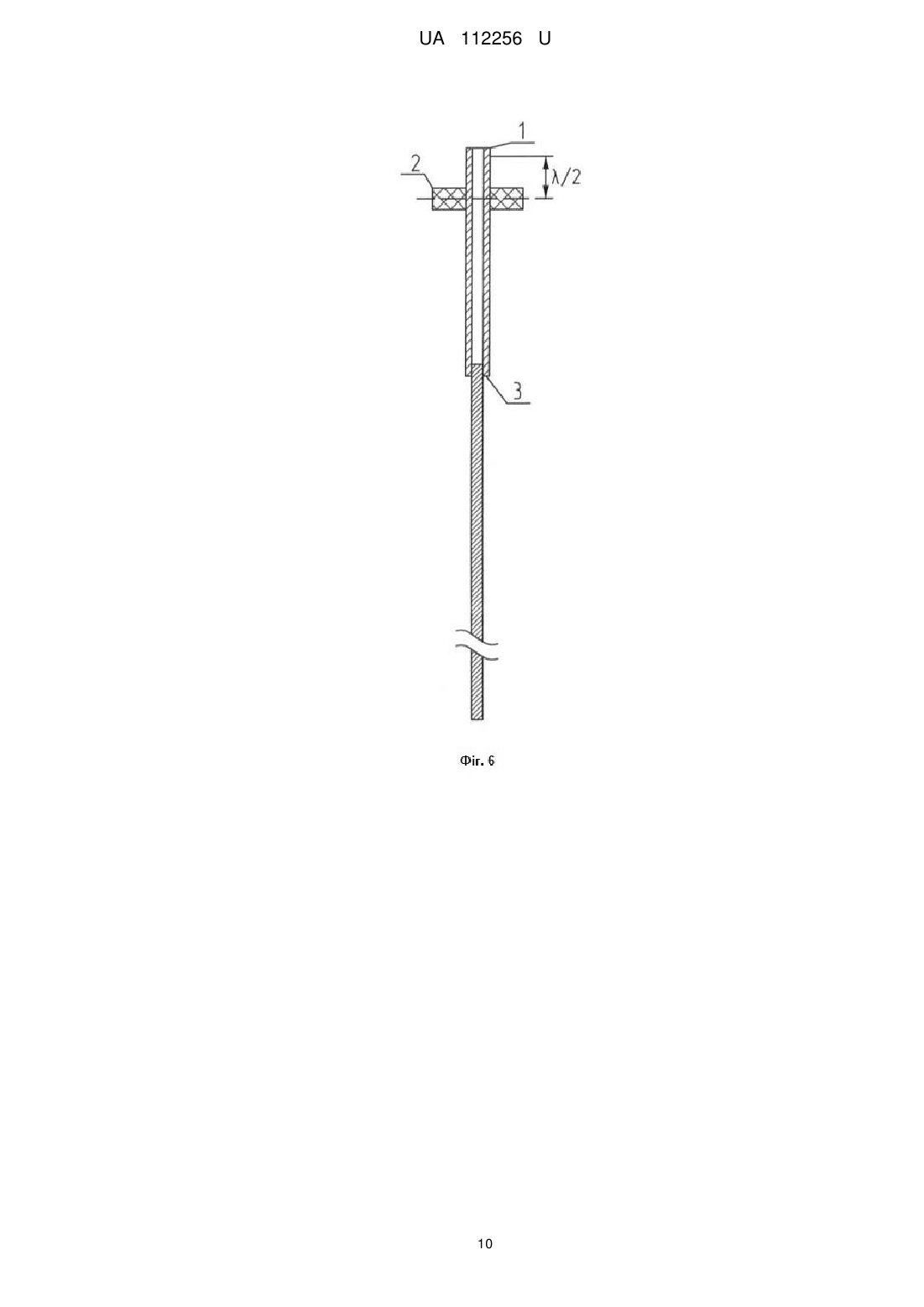
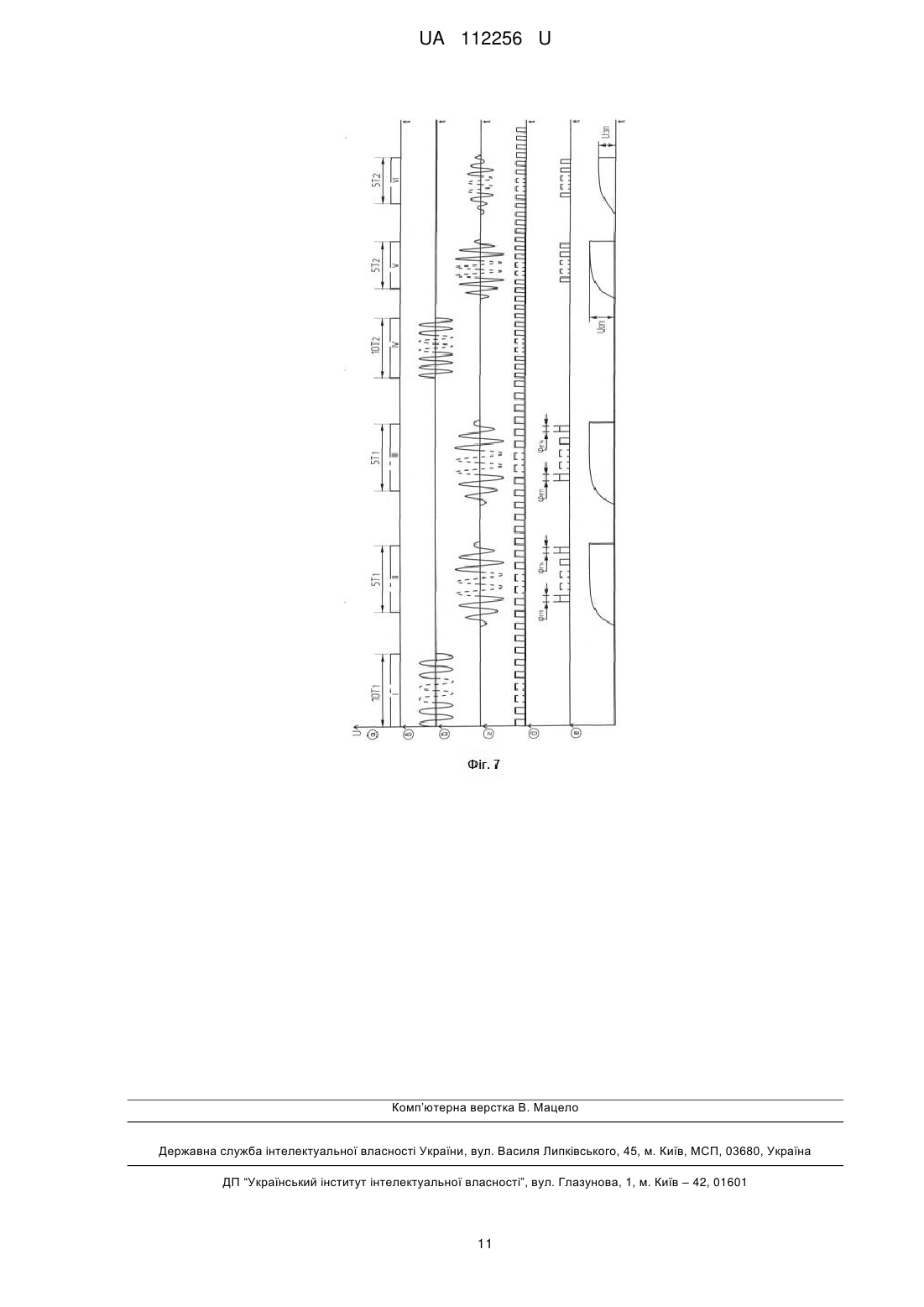
Реферат: UA 112256 U UA 112256 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області вимірювання рівня рідини за допомогою пружних ультразвукових коливань згінного типу в пружних хвилеводах. Може бути використана для вимірювання рівня рідини в технологічних ємностях, в тому числі підземного типу, зі складними умовами для функціонування, наприклад при наявності високого тиску, високої температури і легкозаймистих рідин. Відомі ультразвукові пристрої для вимірювання рівня рідини, фізичною основою яких є явище зменшення інтенсивності пружних хвиль внаслідок випромінювання у рідину, які називаються дисипативними або акустоімпедансними. Дія таких рівнемірів ґрунтується на обчисленні співвідношення інтенсивності прямої зондувальної хвилі та зворотної зондувальної хвилі. Так, наприклад, відомий пристрій для реалізації способу вимірювання рівня рідини (пат. РФ № 2221993, кл. G01F 23/28, 2002 р.) має велику похибку, зумовлену тим, що інтенсивність зворотної зондувальної хвилі при збільшенні глибини занурення зменшується за експоненціальним законом. З іншого боку відомі пристрої, що використовують ефект пружнорідинної взаємодії згінних хвиль на частотах нижчих частоти збігу, який призводить до зміни швидкості поширення хвиль у пружному хвилеводі при зануренні його в рідину. Відомий пристрій за пат. США № 4896535, кл. G01F 23/28, 1990 p. має обмежений діапазон вимірювань, а його модифікації мають складну конструкцію. Найближчим аналогом до заявленої корисної моделі є пристрій по пат. США № 4213337, кл. G01F 23/28, 1980 р., до складу якого, як і в пристрої що пропонується, входить циліндричний суцільний або порожнистий хвилевід, п'єзоелектричний елемент для збудження ультразвукових згінних коливань, встановлений на незануреному кінці хвилеводу, засіб електронної обробки, що містить керований генератор частоти, фазовий детектор, інтегруючий підсилювач для підстроювання частоти генератора і пристрій перетворення вихідного сигналу. Недоліком вказаного пристрою, взятого за прототип, є обмежений діапазон однозначного вимірювання рівня рідини, який визначається по різниці фаз між сигналом збудження п'єзоелектричного елемента і зворотною зондувальною хвилею, що відбивається від протилежного зануреного кінця хвилеводу. Визначення поточної фази зворотної зондувальної хвилі, відносно сигналу збудження п'єзоелектричного елемента, призводить до виникнення додаткових похибок вимірювання дійсного значення фази, внаслідок залежності резонансної частоти п'єзоелектричного елемента від температури. В основу корисної моделі поставлена задача по створенню конструкції рівнеміра, яка дозволяє односторонню установку на ємність, має розширений діапазон вимірювань рівня рідини, підвищену роздільну здатність, зменшену похибку вимірювань. Поставлена задача вирішується тим, що ультразвуковий рівнемір, який містить циліндричний суцільний або порожнистий хвилевід, вертикально встановлений в ємність, нижній кінець якого занурений в рідину, п'єзоелектричний елемент, який встановлений на верхньому кінці незануреної частини хвилеводу, засіб електронної обробки, який містить фазовий детектор, керований генератор частоти, інтегруючий підсилювач для підстроювання частоти керованого генератора, пристрій перетворення вихідного сигналу, згідно з корисною моделлю, між п'єзоелектричним елементом і рідиною, на відстані, яка перевищує мертву зону, змінений переріз хвилеводу для створення опорної хвилі шляхом відбиття частини прямої зондувальної хвилі, а засіб електронної обробки додатково містить перший та другий підсилювачі, стробовані введеним мікроконтролером, та піковий детектор. При цьому для масштабування підсилювачі виконані з керованим коефіцієнтом підсилення, вихід першого підсилювача підключений до п'єзоелектричного елемента, а вхід до першого виходу керованого генератора, вхід другого стробованого підсилювача підключений до п'єзоелектричного елемента, а вихід до входів фазового і пікового детекторів. До другого входу фазового детектора підключений другий вихід керованого генератора, а, крім того, шина управління мікроконтролера підключена до першого і другого стробованих підсилювачів та до керованого генератора частоти. Вихід фазового детектора підключений до входу вимірювання мікроконтролера а вихід пікового детектора підключений до входу аналого-цифрового перетворювача мікроконтролера для обчислення рівня рідини по почергово виміряних значеннях фаз опорної та зворотної зондувальної хвиль таїх інтенсивності. Крім того, вимірювання фаз здійснюється з підстроюванням частоти збудження до значення резонансної частоти передавача, а вимірювання інтенсивності на фіксованій частоті з масштабуванням шляхом змін коефіцієнтів підсилення першого та другого підсилювачів, причому вихід мікроконтролера підключений до згаданого пристрою перетворення вихідного сигналу. Новим також є те, що на верхній частині хвилеводу встановлений температурний датчик для коригування вимірюваних значень рівня за параметрами рідини. 1 UA 112256 U 5 10 15 20 25 30 35 40 45 50 55 60 Основною відмінністю запропонованої корисної моделі від відомих аналогів є те, що рівень рідини обчислюється по значенню поточної фази зворотної зондувальної хвилі відносно поточної фази опорної хвилі, яка відбивається від місця зміни перерізу хвилеводу (надалі репера) і по додатково обчисленому загасанню зворотної зондувальної хвилі, яке також обчислюється відносно інтенсивності опорної хвилі. Тобто вимірювання рівня здійснюється шляхом обчислення по результатах вимірювань, здійснених по двох шкалах, грубій - по затуханню, і точній - по фазі зворотної зондувальної хвилі. Виключення неоднозначності вимірів по точній шкалі здійснюється програмним шляхом мікроконтролером, за критерієм близькості отриманих значень. Вимірювання фази опорної хвилі, дозволяє виключити похибки вимірювання фази, які з'являються при зміні температури через зміну резонансної частоти п'єзоелектричних елементів. Похибка виключається автоматичним підстроюванням частоти коливань збуджуваних у хвилеводі, до значення фактичної частоти резонансу п'єзоелектричних елементів, що призводить до зменшення варіацій миттєвої частоти збуджуваних хвиль. За відомим значенням фактичної робочої частоти, відомим геометричним розмірам і по фазі коливань опорної хвилі, здійснюється коригування значення початкової фази коливань зворотної зондувальної хвилі. У той же час, через залежність загасання від частоти, вимірювання інтенсивності здійснюється шляхом вимірювання пікових значень амплітуди зондувальної і відбитої хвиль, на фіксованій частоті. Зменшення похибок вимірювання рівня рідини, викликаних зміною густини і швидкості звуку в рідині при зміні температури, здійснюється введенням в конструкцію рівнеміра датчика температури, встановленого на хвилеводі, для програмної корекції виміряних значень рівня, по відомих властивостях рідини. З метою розширення динамічного діапазону вимірювань дисипативним методом по загасанню, в канали передачі і прийому введені підсилювачі з керованим коефіцієнтом посилення, які використовуються для масштабування амплітуди сигналів. Новою є також конструкція складена із двох частин - циліндричних стержнів різного діаметра, трубок різного діаметра, стержня і трубки в довільних комбінаціях таким чином, щоб місце з'єднання, яке утворює репер, знаходилось на не зануреній частині хвилеводу, причому нижня частина складеного хвилеводу має діаметр менший, ніж верхня. Суть корисної моделі пояснюють креслення. На фіг. 1 - загальна схема пристрою. На фіг. 2-6 - конструкції хвилеводів; на фіг. 7 - часові діаграми роботи рівнеміра. Ультразвуковий рівнемір складається з хвилеводу, п'єзоелектричного елемента 2, який збуджує згинні коливання у хвилеводі, реперу 3, який утворений на хвилеводі, шляхом зміни його перерізу, на відстані, яка перевищує мертву зону, для формування опорної хвилі відбиття зондуючої хвилі, та підключений до виходу стробованого підсилювача із керованим коефіцієнтом передачі 4, який формує сигнал від опорної та зворотної зондуючої хвиль, крім того, підключений до входу стробованого підсилювача із керованим коефіцієнтом передачі 5. Вхід підсилювача 4 підключений до першого виходу керованого генератора 6, з якого надходить безперервний синусоїдальний сигнал, а вихід підсилювача 5 до першого входу фазового детектора 7 і до входу пікового детектора 8. Другий вхід фазового детектора 7 підключений до другого виходу керованого генератора 6, з якого надходить безперервний сигнал у вигляді меандра, а шини управління керованого підсилювачів 4,5 та генератора частоти 6 приєднані до шини управління мікроконтролера 9. Вихід мікроконтролера підключений до пристрою перетворення вихідного сигналу 10, який здійснює перетворення цифрової інформації, про рівень рідини, в електричний сигнал. Датчик температури 11 підключений до входу вимірювання температури мікроконтролера. П'єзоелектричний елемент 2, може мати кільцеву форму, з секціонованими електродами, у вигляді півкілець. Різні виконання конструкції хвилеводів наведені на фіг. 2-4. На фіг. 2 наведена конструкція із суцільного стержня, на якому виконана проточка утворює репер 3. В діапазоні частот нижче частоти збігу, ефект доданої маси впливає на швидкість поширення пружних коливань, створюється рідиною знаходиться як зовні стержня, так і всередині стержня, який виконаний у вигляді трубки. Варіант хвилеводу, який виконаний з пустотілої трубки без заповнення внутрішньої порожнини рідиною, наведений на фіг. 3, де функції репера 3 здійснюються запресованим всередину циліндром. Виконання хвилеводу із заповненням внутрішньої порожнини рідиною, наведене на фіг. 4, повинне мати дихальний отвір біля репера 3, в частині що не контактує з рідиною. Це виконання, у разі, якщо воно має однакові розміри з аналогічним суцільним стрижнем, виготовленим із однакового матеріалу, відрізняється більшою чутливістю зміни фази від рівня рідини. На фіг. 5 наведено варіант складеного хвилеводу з двох суцільних стержнів, де як репер 3 використовується переріз зміни розмірів. Його перевагою є одночасне підвищення жорсткості конструкції та частоти збігу, за рахунок зменшення діаметра стержня, 2 UA 112256 U 5 10 15 20 25 30 35 40 45 50 55 60 який занурюється у рідину. На фіг. 6 наведено варіант п'єзоелектричних елементів 2, 3 є кільцева з секціонованими електродами у вигляді півкілець. Пари електродів, які розташовані один під одним, збуджуються протифазними сигналами. Пристрій працює наступним чином. Мікроконтролер формує почергові цикли вимірювання фаз і вимірювання пікових амплітуд, які можуть виконуватися як на одній, так і на різних частотах під керуванням мікроконтролера. Підстроювання частоти для вимірювання фази проводиться за результатами попереднього циклу вимірювання поточної фази опорної хвилі, а вимірювання пікових амплітуд завжди проводиться на одній і тій же частоті. Часові діаграми роботи рівнеміра відображені на фіг. 7. Під час формування стробуючого імпульсу І, стробованим підсилювачем 4 формується п'єзоелемент імпульс збудження із синусоїдальним заповненням. Після чого, в моменти часу, які відповідають прийому опорного сигналу і сигналу відбитого від кінця хвилеводу, мікроконтролер формує стробуючі імпульси II і III, під час яких проводиться вимірювання різниці фаз опорної і зворотної зондувальної хвилі відносно частоти керованого генератора. З виходу підсилювача 5 сигнал надходить на вхід фазового детектора 7 і пікового детектора 8. Сигнал з виходу фазового детектора 7 надходить, наприклад, на вхід запуску-зупинки таймера мікроконтролера 9, який здійснює підрахунок імпульсів від внутрішнього високочастотного генератора мікроконтролера, частота яких повинна бути значно вищою, ніж період сигналу. Визначення поточної фази опорної і зворотної зондувальної хвилі здійснюється розрахунковим шляхом по відомому значенню періоду коливань зондувальних хвиль. При цьому мікроконтролер 11 за час дії стробів II і III проводить вимірювання поточних фаз кілька разів, отримуючи ряд значень φ r11-φr1k поточної фази опорної хвилі та ряд значень поточної фази φе11-φе1k зворотної зондувальної хвилі. Різниця між суміжними значеннями φr11-φr1k використовується для обчислення частоти збудження у наступному циклі вже із зміненою частотою. Для обчислення значень поточних фаз опорної та зворотної зондувальної хвилі виконується усереднення, в тому числі і з застосуванням статистичних методів. Усереднене значення поточної фази опорної хвилі використовується для коригування значення фази зворотної зондувальної хвилі у незануреному стані хвилеводу, від якого здійснюється відлік зміни поточного значення фази зворотної зондувальної хвилі, яка викликана дією оточуючої рідини. На підставі значень різниці фаз між поточним значенням фази зворотної зондувальної хвилі та значенням фази зворотної зондувальної хвилі у незануреному хвилеводі, та з урахуванням таких значень, які отримані для двох різних рівнів рідини при градуюванні рівнеміра, мікроконтролер 9 обчислює періодичний ряд значень рівня рідини, Аналогічно, після формування стробуючого імпульсу IV, мікроконтролер формує стробуючі імпульси V і VI, під час яких проводиться вимірювання пікових амплітуд опорної та зворотної зондувальної хвиль. Відбиті від репера 3 і кінця хвилеводу сигнали, прийняті п'єзоелементом 2, надходять на вхід підсилювача 5, який в цьому циклі стробується сигналами V, VI. По обчисленому співвідношенню виміряних пікових амплітуд прямої та зворотної зондувальної хвиль, та з урахуванням таких значень, які отримані для двох різних рівнів рідини при градуюванні рівнеміра, обчислює єдине значення рівня. Точне значення рівня визначається за критерієм близькості значень рівня, які отримані при вимірюванні різниці фаз і значення отриманого шляхом обчислення співвідношення амплітуд. За допомогою перетворювача 10 формується електричний сигнал, що відповідає рівню рідини в ємності. На часовій діаграмі фіг. 9 наведені епюри сигналів в пристрої. На графіку (а) наведена черговість формування стробів для випадку, коли строб І, під час якого в хвилеводі збуджується хвильової пакет, має тривалість 10Т1, де Т1 період коливань. Оскільки час поширення від п'єзоелектричного елемента до репера 3, є величиною фіксованою, мікроконтролер формує строб II, в момент часу відповідний до часового положення імпульсу, відбитого від репера, а в момент часу відповідний прийому імпульсу від кінця, генерується строб III. У циклі вимірювання фази тривалість стробів II і IIІ повинна бути вдвічі менше тривалості імпульсу збудження, що забезпечить подачу на фазовий детектор тієї частини хвильового пакета, яка знаходиться в центрі прийнятих хвильових пакетів і має однакові значення миттєвої частоти. У циклі вимірювання пікової амплітуди, тривалість стробів може бути довільною в діапазоні 5-10 Т2. На графіку (б) зображені епюри сигналів збудження хвилевода. На графіку (в) епюри сигналів на виходах підсилювача 5, відповідно. На графіку (г) епюра сигналів на першому і другому виходах керованого генератора 6. На графіку (д) наведена епюра сигналу на виході фазового детектора 7, який подається на вхід мікроконтролера 9. На графіку (e) наведена епюра сигналу на виході пікового детектора, де Uoп - амплітуда сигналу від опорної хвилі на виході пікового детектора, Uзп - амплітуда сигналу від зворотної зондуючої хвилі. Корисна модель може бути реалізована на сучасній елементній базі. Сучасні мікроконтролери, наприклад мікроконтролери фірми Microchip серій РІС24 або dsPIC33 мають 3 UA 112256 U 5 тактову частоту вище 100 МГц, що на робочих частотах рівнеміра, які знаходяться в діапазоні 30,0-60, кГц, дозволяє здійснити вимір фази з дозволом вище 10-3π радіан. Як керований генератор може бути використана мікросхема фірми Analog Devices AD9833. Головні ланки корисної моделі були з макетовані та проведені відповідні вимірювання. Практично без ускладнення конструкції рівнеміра, за рахунок вдосконалення програмноапаратних рішень генерування та обробки пружних коливань у хвилеводі, досягнуте значне розширення діапазону вимірювань, тому собівартість запропонованого ультразвукового рівнеміра є значно нижчою від відомих аналогів, а високі метрологічні характеристики роблять пристрій конкурентоздатним на ринку автоматизації виробництва. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 1. Ультразвуковий рівнемір, що містить циліндричний суцільний або порожнистий хвилевід, вертикально встановлений в ємність, нижній кінець якого занурений в рідину, п'єзоелектричний елемент, який встановлений на верхньому кінці незануреної частини хвилеводу, засіб електронної обробки, який містить фазовий детектор, керований генератор частоти, інтегруючий підсилювач для підстроювання частоти керованого генератора, пристрій перетворення вихідного сигналу, який відрізняється тим, що між п'єзоелектричним елементом і рідиною, на відстані, яка перевищує мертву зону, змінений переріз хвилеводу для створення опорної хвилі шляхом відбиття частини прямої зондувальної хвилі, засіб електронної обробки додатково містить перший та другий підсилювачі, стробовані введеним мікроконтролером, причому для масштабування підсилювачі виконані з керованим коефіцієнтом підсилення, вихід першого стробованого підсилювача підключений до п'єзоелектричного елемента, а вхід до першого виходу керованого генератора, вхід другого стробованого підсилювача підключений до п'єзоелектричного елемента, а вихід до входів фазового і пікового детекторів, до другого входу фазового детектора підключений другий вихід керованого генератора частоти, а, крім того, шина управління мікроконтролера підключена до першого і другого стробованих підсилювачів та до керованого генератора частоти, при цьому вихід фазового детектора підключений до входу вимірювання мікроконтролера, вихід пікового детектора підключений до входу аналогоцифрового перетворювача мікроконтролера для обчислення рівня рідини по почергово виміряних значеннях фаз та інтенсивності опорної та зворотної зондувальної хвиль, крім того, вимірювання фаз здійснюють з підстроюванням частоти збудження до значення резонансної частоти передавача, а вимірювання інтенсивності на фіксованій частоті шляхом масштабування зміною коефіцієнтів підсилення першого та другого підсилювачів, причому вихід мікроконтролера підключений до пристрою перетворення вихідного сигналу. 2. Ультразвуковий рівнемір за п. 1, який відрізняється тим, що на верхній частині хвилеводу встановлений температурний датчик для коригування вимірюваних значень рівня за параметрами рідини. 4 UA 112256 U 5 UA 112256 U 6 UA 112256 U 7 UA 112256 U 8 UA 112256 U 9 UA 112256 U 10 UA 112256 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01F 23/28
Мітки: ультразвуковий, рівнемір
Код посилання
<a href="https://ua.patents.su/13-112256-ultrazvukovijj-rivnemir.html" target="_blank" rel="follow" title="База патентів України">Ультразвуковий рівнемір</a>
Ультразвуковий рівнемір
Номер патенту: 24121
Опубліковано: 25.06.2007
Автори: Стенцель Йосип Іванович, Томсон Андрій Владиславович
МПК: G01F 23/28
Мітки: рівнемір, ультразвуковий
Формула / Реферат:
Ультразвуковий рівнемір, що містить п'єзокерамічний випромінювач, підсилювач, компаратор, джерело опорної напруги, мікроконтролер, регульоване джерело імпульсів збудження та блок обробки інформації та індикації, який відрізняється тим, що мікроконтролер у залежності від рівня контрольованого середовища змінює амплітуду вихідних імпульсів збудження, які подаються на п'єзокерамічний випромінювач.
Ультразвуковий рівнемір

Номер патенту: 33879
Опубліковано: 15.02.2001
Автори: Лазебний Віктор Степанович, Тертишний Євген Віталійович
МПК: G01F 23/28
Мітки: ультразвуковий, рівнемір
Текст:
...входом тригера 9, об'єднаним із входами обнуління першого 10 і другого 11 лічильників пристрою керування настроюванням 6. Вихід тригера 9 пристрою керування настроюванням 6 з'єднаний з другим керуючим входом приймача 16 пристрою прийому-передачи 2 та з другим входом логічного елемента І 8 пристрою керування настроюванням 6. Вихід логічного елемента І 8 з'єднаний з лічильним входом першого лічильника 10, інформаційний вихід якого з'єднаний з...
Ультразвуковий рівнемір

Номер патенту: 32894
Опубліковано: 10.06.2008
Автори: Рябіченко Антон Вікторович, Стенцель Йосип Іванович
МПК: G01F 23/28
Мітки: рівнемір, ультразвуковий
Формула / Реферат:
Ультразвуковий рівнемір, що включає послідовно з'єднані п'єзокерамічний випромінювач, підсилювач, аналогово-цифровий перетворювач, блок пам'яті, схему порівняння, мікроконтролер, який з'єднаний з блоком обробки та індикації, та регульоване джерело імпульсів збудження, яке з'єднано з п'єзокерамічним випромінювачем, який відрізняється тим, що мікроконтролер регулює амплітуду імпульсу, який подається регульованим джерелом імпульсів збудження на...
Спосіб вимірювання рівня рідких середовищ і ультразвуковий рівнемір
Номер патенту: 82594
Опубліковано: 25.04.2008
Автори: Уваров Анатолій Якович, Мєтьолкін Максим Іванович, Лагода Дмитро Павлович, Посошко Віктор Миколайович
МПК: G01S 15/00, G01F 23/28
Мітки: вимірювання, середовищ, спосіб, рівня, рідких, рівнемір, ультразвуковий
Формула / Реферат:
1. Спосіб вимірювання рівня рідких середовищ, що заснований на використанні ультразвукових імпульсів, який відрізняється тим, що блок датчика живлять постійним струмом від блока електронного вимірювального по двопровідній лінії, а інформацію від блока датчика до блока електронного вимірювального передають по цій лінії у вигляді цифрового багаторозрядного коду, який формують за допомогою амплітудної модуляції струму, споживаного блоком датчика...
Оптичний рівнемір
Номер патенту: 44707
Опубліковано: 12.10.2009
Автори: Довгалець Сергій Михайлович, Борщова Ірина Петрівна
МПК: G01F 23/00
Формула / Реферат:
Оптичний рівнемір, що містить джерело випромінювання, оптичний хвилевід, який відрізняється тим, що в нього введено спектроаналізатор, вихід якого пов'язаний з входом блока обробки, вхід спектроаналізатора пов'язаний з виходом оптичного хвилеводу, вхід якого пов'язаний з виходом джерела випромінювання, причому джерело випромінювання є немонохромним, а оптичний хвилевід являє собою діелектричний стержень з серцевиною, що має від'ємний показник...
Попередній патент: Спосіб відбору монолітів ґрунту непорушеної структури із свердловини
Наступний патент: Ультразвуковий рівнемір
Випадковий патент: Лікер "де амур персик" ("de'amour peach")