Пристрій для лінійних переміщень
Номер патенту: 14904
Опубліковано: 04.03.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
Формула / Реферат
![]() Устройство для линейных перемещений, содержащее подвижный и неподвижный элементы плоской аэростатической опоры, регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что подвижный элемент помещен между четырьмя основаниями, являющимися неподвижными элементами, два из которых образуют с гранями подвижного элемента плоскую аэростатическую опору, а два других основания с двумя другими гранями подвижного элемента образуют замыкающую плоскую аэростатическую опору, причем в упомянутых основаниях выполнены жиклеры подачи газа в зазоры плоской аэростатической опоры и в зазоры замыкающей плоской аэростатической опоры, в одном основании плоской аэростатической опоры установлены не менее трех блоков датчиков положения подвижного элемента, в каждом из которых на одинаковом расстоянии между ними установлены первый и второй датчики величин зазоров, причем основания датчиков величин зазоров всех блоков датчиков положения подвижного элемента установлены в одной или параллельных плоскостях, в другом основании плоской аэростатической опоры установлены регуляторы положения подвижного элемента, причем каждый регулятор положения подвижного элемента установлен напротив электрически связанного с ним блока датчиков положения подвижного элемента, в одном из оснований замыкающей плоской аэростатической опоры установлены не менее двух блоков датчиков линейного перемещения подвижного элемента, в каждом из которых на расстояниях, равных расстояниям между датчиками величин зазоров в блоках датчиков положения подвижного элемента, установлены первый и второй датчики величин зазора, причем основания датчиков величин зазоров блоков датчиков линейного перемещения подвижного элемента установлены в одной или в параллельных плоскостях, а в другом основании замыкающей плоской аэростатической опоры установлены не менее двух регуляторов линейности перемещения подвижного элемента, причем каждый регулятор линейности перемещения подвижного элемента установлен напротив электрически связанного с ним блока датчиков линейного перемещения подвижного элемента, кроме того, устройство содержит блок управления перемещением подвижного элемента, включающий цифровой блок, операционные усилители регуляторов положения подвижного элемента, дифференциальные усилители регуляторов положения подвижного элемента, измерители положения подвижного элемента, переключатели "больше - выключено - меньше", переключатель "работа - выключено", датчик величины линейного перемещения подвижного элемента, измеритель величины линейного перемещения подвижного элемента, операционные усилители регуляторов линейности перемещения подвижного элемента, дифференциальные усилители регуляторов линейности перемещения подвижного элемента, измерители линейности перемещения подвижного элемента, причем первые датчики величин зазоров и вторые датчики величин зазоров блоков датчиков положения подвижного элемента соединены с входами измерителей положения подвижного элемента, выходы измерителей положения подвижного элемента соединены с входам цифрового блока, первые датчики величин зазоров блоков датчиков линейного перемещения и вторые датчики величин зазоров блоков датчиков линейного перемещения подвижного элемента соединены с входами измерителей линейности перемещения подвижного элемента, выходы измерителей линейности перемещения подвижного элемента соединены с входами цифрового блока, выходы измерителей положения подвижного элемента по сигналам первых датчиков величин зазоров блоков датчиков положения подвижного элемента через переключатель "работа - выключено" соединены с первыми входами дифференциальных усилителей регуляторов положения подвижного элемента, выходы измерителей линейности перемещения подвижного элемента по сигналам первых датчиков величин зазоров блоков датчиков линейного перемещения подвижного элемента через переключатель "работа - выключено" соединены с первыми входами дифференциальных усилителей регуляторов линейности перемещения подвижного элемента, входы операционных усилителей регуляторов положения подвижного элемента соединены с выходами цифрового блока, а выходы операционных усилителей регуляторов положения подвижного элемента через переключатель "больше - выключено - меньше" соединены с входами дифференциальных усилителей регуляторов положения подвижного элемента, входы операционных усилителей регуляторов линейности перемещения подвижного элемента соединены с выходами цифрового блока, а их "выходы через переключатели "больше - выключено - меньше" соединены с входами дифференциальных усилителей регуляторов линейности перемещения подвижного элемента, выходы цифрового блока через переключатель "работа - выключено" соединены со вторыми входами дифференциальных усилителей регуляторов положения подвижного элемента и со вторыми входами дифференциальных усилителей регуляторов линейности перемещения подвижного элемента, выходы дифференциальных усилителей регуляторов положения подвижного элемента соединены с регуляторами положения подвижного элемента, выходы дифференциальных усилителей регуляторов линейности перемещения подвижного элемента соединены с регуляторами линейности перемещения подвижного элемента.
Устройство для линейных перемещений, содержащее подвижный и неподвижный элементы плоской аэростатической опоры, регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что подвижный элемент помещен между четырьмя основаниями, являющимися неподвижными элементами, два из которых образуют с гранями подвижного элемента плоскую аэростатическую опору, а два других основания с двумя другими гранями подвижного элемента образуют замыкающую плоскую аэростатическую опору, причем в упомянутых основаниях выполнены жиклеры подачи газа в зазоры плоской аэростатической опоры и в зазоры замыкающей плоской аэростатической опоры, в одном основании плоской аэростатической опоры установлены не менее трех блоков датчиков положения подвижного элемента, в каждом из которых на одинаковом расстоянии между ними установлены первый и второй датчики величин зазоров, причем основания датчиков величин зазоров всех блоков датчиков положения подвижного элемента установлены в одной или параллельных плоскостях, в другом основании плоской аэростатической опоры установлены регуляторы положения подвижного элемента, причем каждый регулятор положения подвижного элемента установлен напротив электрически связанного с ним блока датчиков положения подвижного элемента, в одном из оснований замыкающей плоской аэростатической опоры установлены не менее двух блоков датчиков линейного перемещения подвижного элемента, в каждом из которых на расстояниях, равных расстояниям между датчиками величин зазоров в блоках датчиков положения подвижного элемента, установлены первый и второй датчики величин зазора, причем основания датчиков величин зазоров блоков датчиков линейного перемещения подвижного элемента установлены в одной или в параллельных плоскостях, а в другом основании замыкающей плоской аэростатической опоры установлены не менее двух регуляторов линейности перемещения подвижного элемента, причем каждый регулятор линейности перемещения подвижного элемента установлен напротив электрически связанного с ним блока датчиков линейного перемещения подвижного элемента, кроме того, устройство содержит блок управления перемещением подвижного элемента, включающий цифровой блок, операционные усилители регуляторов положения подвижного элемента, дифференциальные усилители регуляторов положения подвижного элемента, измерители положения подвижного элемента, переключатели "больше - выключено - меньше", переключатель "работа - выключено", датчик величины линейного перемещения подвижного элемента, измеритель величины линейного перемещения подвижного элемента, операционные усилители регуляторов линейности перемещения подвижного элемента, дифференциальные усилители регуляторов линейности перемещения подвижного элемента, измерители линейности перемещения подвижного элемента, причем первые датчики величин зазоров и вторые датчики величин зазоров блоков датчиков положения подвижного элемента соединены с входами измерителей положения подвижного элемента, выходы измерителей положения подвижного элемента соединены с входам цифрового блока, первые датчики величин зазоров блоков датчиков линейного перемещения и вторые датчики величин зазоров блоков датчиков линейного перемещения подвижного элемента соединены с входами измерителей линейности перемещения подвижного элемента, выходы измерителей линейности перемещения подвижного элемента соединены с входами цифрового блока, выходы измерителей положения подвижного элемента по сигналам первых датчиков величин зазоров блоков датчиков положения подвижного элемента через переключатель "работа - выключено" соединены с первыми входами дифференциальных усилителей регуляторов положения подвижного элемента, выходы измерителей линейности перемещения подвижного элемента по сигналам первых датчиков величин зазоров блоков датчиков линейного перемещения подвижного элемента через переключатель "работа - выключено" соединены с первыми входами дифференциальных усилителей регуляторов линейности перемещения подвижного элемента, входы операционных усилителей регуляторов положения подвижного элемента соединены с выходами цифрового блока, а выходы операционных усилителей регуляторов положения подвижного элемента через переключатель "больше - выключено - меньше" соединены с входами дифференциальных усилителей регуляторов положения подвижного элемента, входы операционных усилителей регуляторов линейности перемещения подвижного элемента соединены с выходами цифрового блока, а их "выходы через переключатели "больше - выключено - меньше" соединены с входами дифференциальных усилителей регуляторов линейности перемещения подвижного элемента, выходы цифрового блока через переключатель "работа - выключено" соединены со вторыми входами дифференциальных усилителей регуляторов положения подвижного элемента и со вторыми входами дифференциальных усилителей регуляторов линейности перемещения подвижного элемента, выходы дифференциальных усилителей регуляторов положения подвижного элемента соединены с регуляторами положения подвижного элемента, выходы дифференциальных усилителей регуляторов линейности перемещения подвижного элемента соединены с регуляторами линейности перемещения подвижного элемента.
Текст
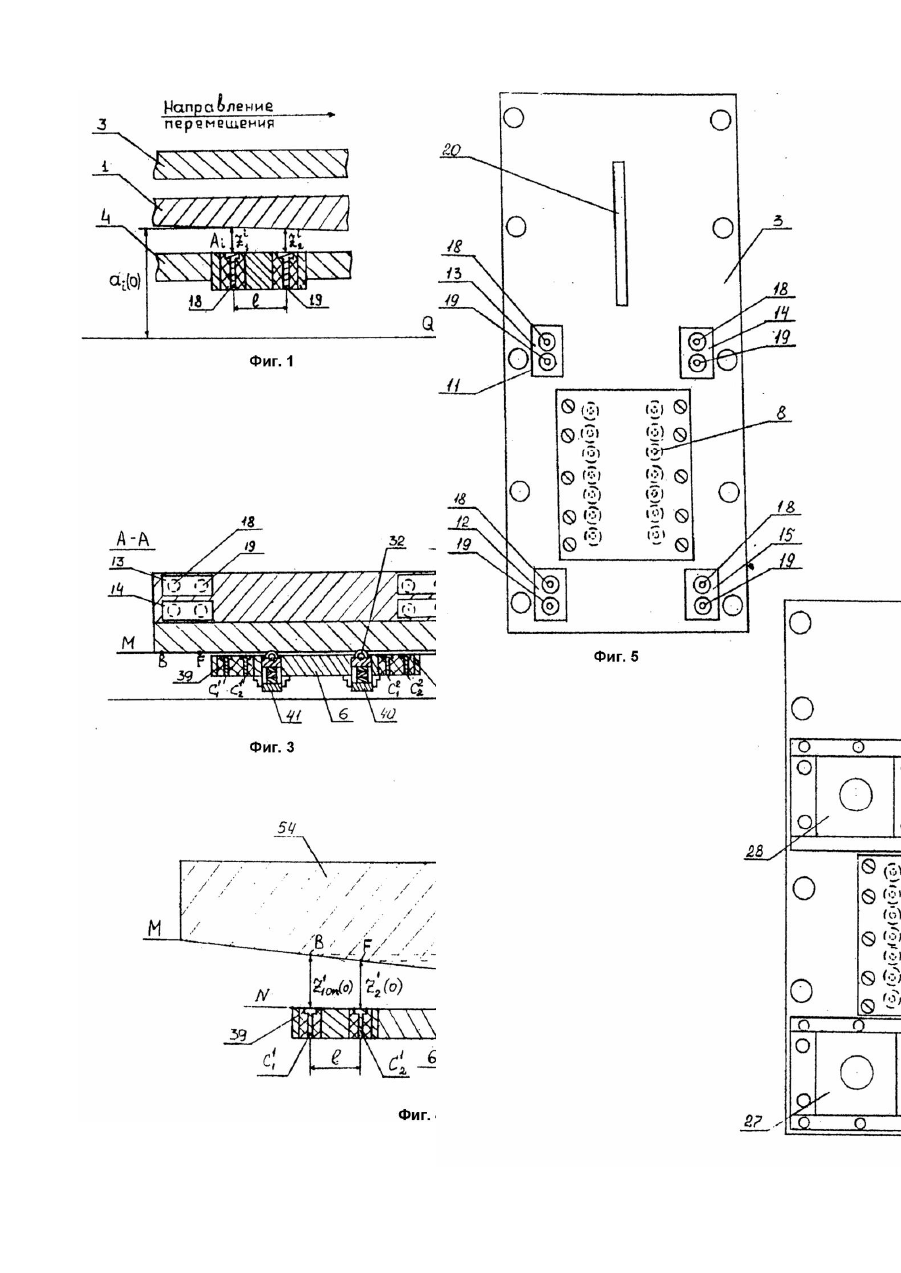
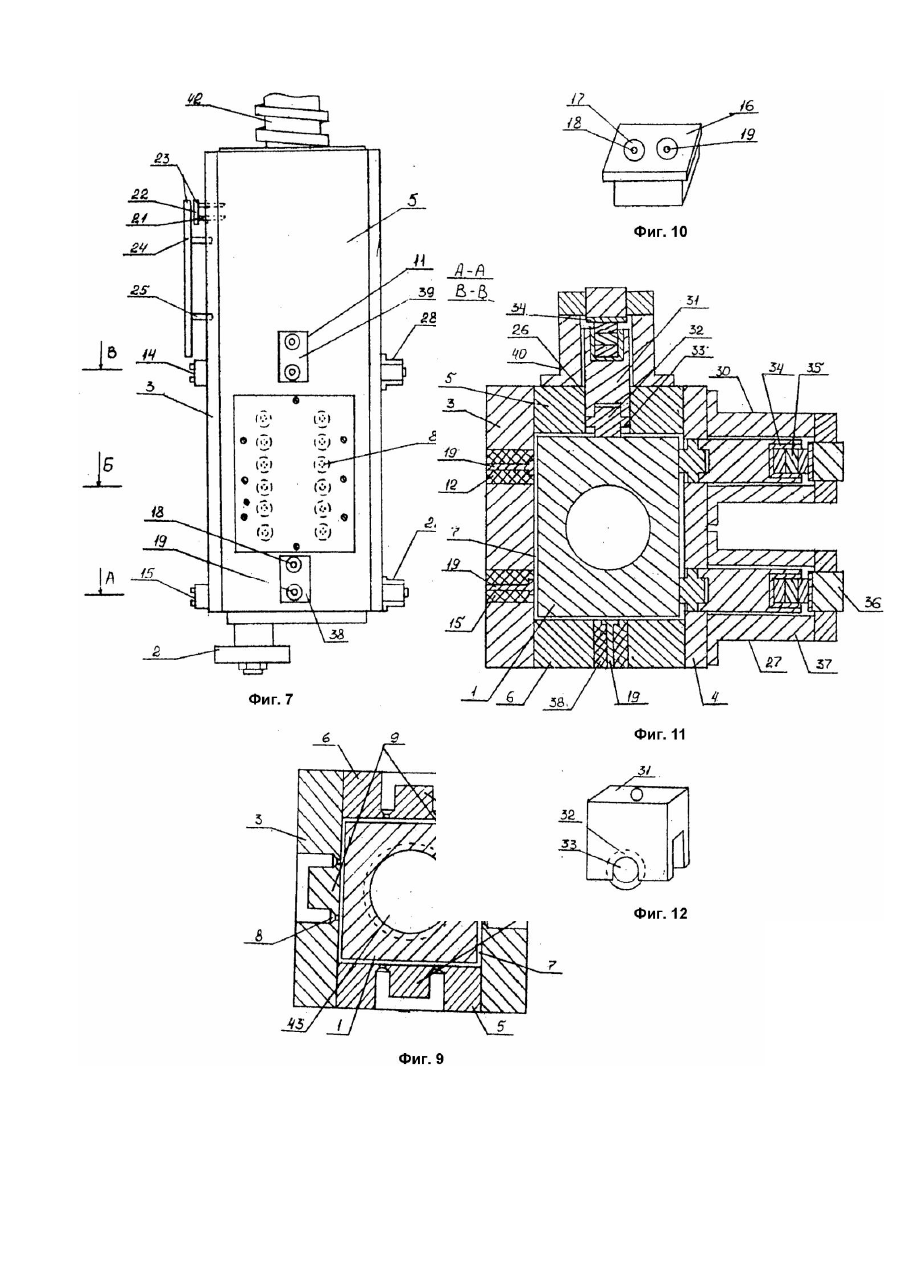
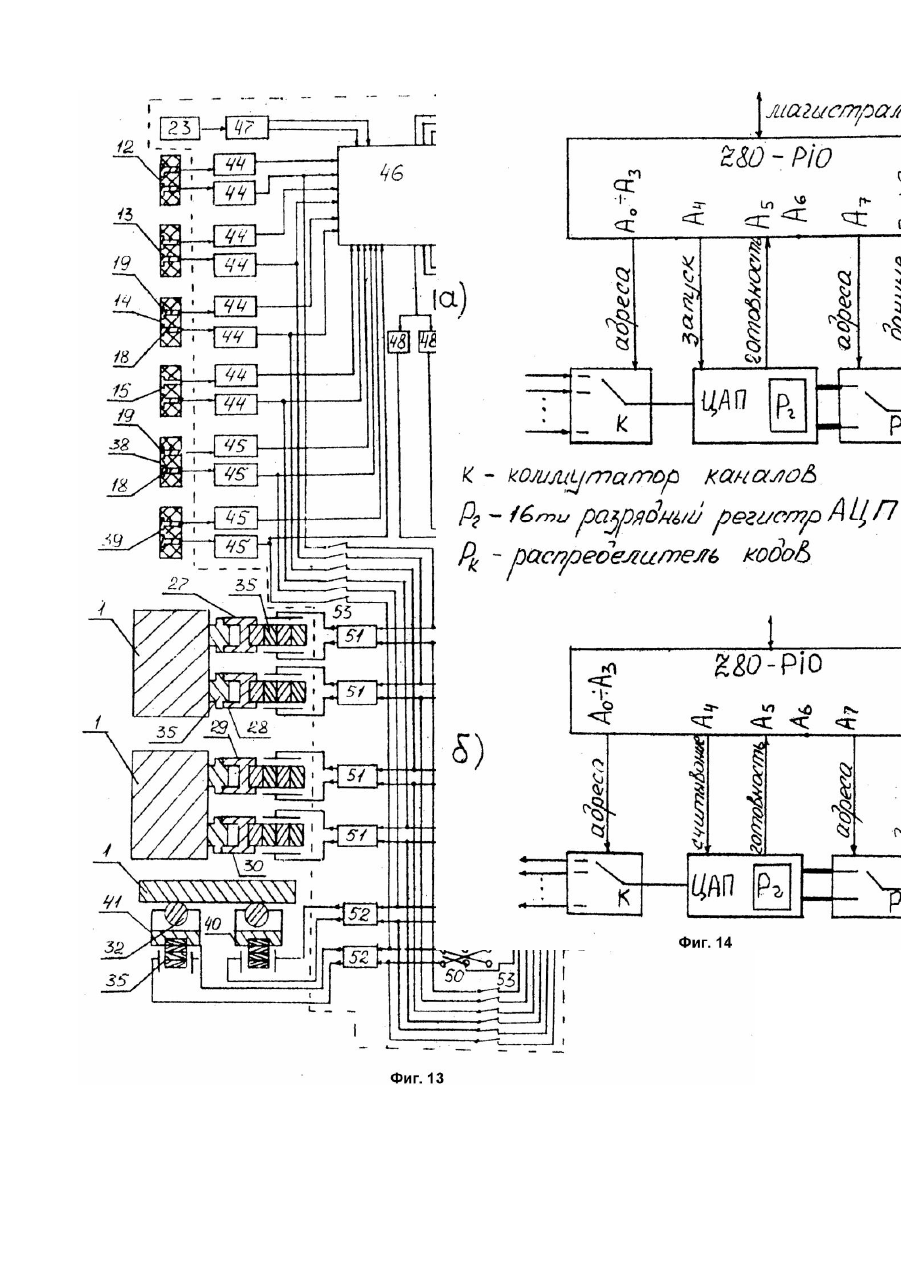
Изобретение относится к станкостроению и может использоваться при конструировании прецизионных станков для обеспечения линейного перемещения элемента формообразующей системы станка. Известно устройство для линейных перемещений, описанное в а.с. СССР №548734 (кл. F16C32/06, Бюл. №8, 28.02.77), содержащее подвижный и неподвижный элемент плоской аэростатической опоры, регуляторы положения подвижного элемента и намагниченного материала плоской аэростатической опоры, при этом в неподвижном элементе из намагниченного материала выполнена приемная камера для смазки, сообщающаяся через каналы подвода, а также дроссели с регулируемыми элементами в упомянутых каналах выполненными в виде стержневых магнитов, обращенных к подвижному элементу одноименными полюсами, на торцах стержней со стороны подачи смазки выполнены опорные выступы, а на боковых поверхностях стержней выполнены продольные канавки для прохода смазки. В аэростатической направляющей изменение расстояний между точками основания подвижного элемента и точками поверхности неподвижного элемента вызывает изменение магнитных сил отталкивания, источником которых является намагниченный подвижный элемент, В результате приоткрываются или призакрываются питающие отверстия регуляторов, давления в газовом слое направляющей, что приводит к изменению главного вектора сил давления в пазовом слое направляющей. Возникающий при этом восстанавливающий момент возвращает подвижный элемент в первоначальное положение. Недостатками устройства по прототипу являются следующие. Регулирование положения подвижного элемента за счет изменения магнитных сил отталкивания, источником которых есть сам подвижный элемент, наличие микронеровностей на его основании, а ' также изменение наклона поверхности неподвижного элемента вызывает изменение положения в пространстве подвижного элемента направляющей. Кроме того, аэростатическая направляющая не обеспечивает линейности перемещения подвижного элемента в плоскости стабилизации его положения. В основу изобретения поставлена задача такого усовершенствования конструкции устройства для линейных перемещений, при котором точки, принадлежащие одной из граней подвижного элемента, при его перемещении сохраняют неизменными расстояния до неподвижной в пространстве плоскости, а точки грани подвижного элемента, перпендикулярные упомянутой выше грани подвижного элемента, относительно этой неподвижной в пространстве плоскости перемещаются по прямым, параллельным этой же неподвижной в пространстве плоскости, вследствие чего все точки, принадлежащие подвижному элементу, перемещаются по прямым линиям, что обеспечивает строго линейное перемещение элемента формообразующей системы прецизионного станка, установленного на подвижном элементе аэростатической направляющей. Решение этой задачи достигается тем, что в устройстве для линейных перемещений, содержащей подвижный и неподвижный элементы плоской аэростатической опоры, регуляторы положения подвижного элемента плоской аэростатической опоры согласно изобретению подвижный элемент помещен между четырьмя основаниями, являющимися неподвижными элементами, два из которых образуют с гранями подвижного элемента плоскую аэростатическую опору, а два др уги х основания с двумя другими гранями подвижного элемента образуют замыкающую плоскую аэростатическую опору, причем, в упомянутых основаниях выполнены жиклеры подачи газа в зазоры плоской аэростатической опоры и в зазоры замыкающей плоской аэростатической опоры, в одном из оснований плоской аэростатической опоры установлены не менее трех блоков датчиков положения подвижного элемента, в каждом из которых на одинаковом расстоянии между ними установлены первый и второй датчики величин зазоров, причем основания датчиков величин зазоров всех блоков датчиков положения подвижного элемента установлены в одной или в параллельных плоскостях; в другом основании плоской аэростатической опоры установлены регуляторы положения подвижного элемента, причем каждый регулятор положения подвижного элемента установлен напротив электрически связанного с ним блока датчиков положения подвижного элемента, в одном из оснований замыкающей плоской аэростатической опоры установлены не менее двух блоков датчиков линейного перемещения подвижного элемента, в каждом из которых на расстояниях, равных расстояниям между датчиками величин зазоров в блоках датчиков положения подвижного элемента, установлены первый и второй датчики величин зазоров, причем основания датчиков величин зазоров блоков датчиков линейного перемещения подвижного элемента установлены в одной или в параллельных плоскостях, а в др угом основании замыкающей плоской аэростатической опоры установлены не менее двух регуляторов линейности перемещения подвижного элемента, причем каждый регулятор линейности перемещения подвижного элемента установлен напротив электрически связанного с ним блока датчиков линейного перемещения подвижного элемента, кроме того устройство содержит блок управления перемещением подвижного элемента, включающий цифровой блок, операционные усилители регуляторов положения подвижного элемента, дифференциальные усилители регуляторов положения подвижного элемента, переключатели "больше - выключено - меньше", переключатель "работа - выключено", датчик величины линейного перемещения подвижного элемента, измеритель величины линейного перемещения подвижного элемента, операционные усилители регуляторов линейности перемещения подвижного элемента, дифференциальные усилители регуляторов линейности перемещения подвижного элемента, измерители линейности перемещения подвижного элемента, измерители положения подвижного элемента. Причем, первые датчики величин зазоров и вторые датчики величин зазоров блоков датчиков положения подвижного элемента соединены с входами измерителей положения подвижного элемента, выходы измерителей положения подвижного элемента соединены с входами цифрового блока, первые датчики величин зазоров блоков датчиков линейного перемещения подвижного элемента и вторые датчики величин зазоров блоков датчиков линейного перемещения подвижного элемента соединены с входами измерителей линейности перемещения подвижного элемента, выходы измерителей линейности перемещения подвижного элемента соединены с входами цифрового блока, выходы измерителей положения подвижного элемента по сигналам первых датчиков величин зазоров блоков датчиков положения подвижного элемента через переключатель "работа - выключено" соединены с первыми входами дифференциальных усилителей регуляторов положения подвижного элемента, датчик величины линейного перемещения подвижного элемента соединен с измерителем величины линейного перемещения подвижного элемента, выходы измерителя величины линейного перемещения подвижного элемента соединены с входами цифрового блока, выходы измерителей линейности перемещения подвижного элемента по сигналам первых датчиков величин зазоров блоков датчиков линейного перемещения подвижного элемента через переключатель "работа - выключено" соединены с первыми входами дифференциальных усилителей регуляторов линейности перемещения подвижного элемента, входы операционных усилителей регуляторов положения подвижного элемента соединены с выходами цифрового блока, а выходы операционных усилителей регуляторов положения подвижного элемента через переключатели "больше - выключено - меньше" соединены с входами дифференциальных усилителей регуляторов положения подвижного элемента, входы операционных усилителей регуляторов линейности перемещения подвижного элемента соединены с выходами цифрового блока, а их вы ходы через переключатель "больше - выключено - меньше" соединены с входами дифференциальных усилителей регуляторов линейности перемещения подвижного элемента, выходы цифрового блока через переключатель "работа выключено" соединены с вторыми входами дифференциальных усилителей регуляторов положения подвижного элемента и с вторыми входами дифференциальных усилителей регуляторов линейности перемещения подвижного элемента, выходы дифференциальных усилителей регуляторов положения подвижного элемента соединены с регуляторами положения подвижного элемента, выходы дифференциальных усилителей регуляторов линейности перемещения подвижного элемента соединены с регуляторами линейности перемещения подвижного элемента. Причинно-следственная связь между совокупностью существенных признаков заявляемого изобретения и достигаемым техническим результатом заключается в следующем. Пусть подвижный элемент 1 (фиг.1) плоской аэростатической опоры 9 (фиг, 2), положение которого стабилизируется относительно неподвижной плоскости перемещается между основаниями 3 и 4, являющимися неподвижными элементами, в которых выполнены жиклеры 8 подачи газа в зазоры 7 опоры 9. Силовое замыкание, а, следовательно, задание направления перемещения подвижного элемента 1обеспечивается замыкающей плоской аэростатической опорой 10 (фиг.2), подвижный элемент 54 которой перемещается между основаниями 5 и 6, в которых выполнены жиклеры 8 подачи газа в зазоры 7 этой опоры 10, перпендикулярен плоскости стабилизации подвижного элемента 1 и скреплен с ним. Пусть также в основании 4 плоской аэростатической опоры 9 симметрично относительно его боковых граней установлены (фиг.3) блоки 12, 13, 14, 15 датчиков величин зазоров. Каждый из блоков 12, 13, 14, 15 датчиков содержит первый датчик 18 величины зазора и второй датчик 19 величины зазора. Таким образом, измеряются величины зазоров между основаниями датчиков 18 и 19 блоков 12, 13, 14, 15 датчиков и поверхностью подвижного элемента 1. Пусть основания первых и вторых датчиков 18 и 19 всех блоков 12, 13, 14, 15 (фиг.1) лежат в одной плоскости, параллельной неподвижной плоскости Расстояния между центрами оснований первого и второго датчиков 18 и 19 в каждом блоке 12, 13, 14, 15 датчиков равны между собой и равны дискрете стабилизации Причем, центры оснований первых и вторых датчиков 18 и 19 каждого блока 12, 13, 14, 15 датчиков расположены над прямыми, параллельными направлению перемещения подвижного элемента 1. Зафиксируем положение подвижного элемента 1 и примем это положение в качестве исходного для перемещения подвижного элемента 1 на заданное расстояние В исходном положении подвижного элемента 1 измеряют величины зазоров под первыми датчиками 18 каждого блока датчиков в данном примере) и запоминают их в качестве опорных зазоров Тогда (фиг.1) расстояния от точек поверхности подвижного элемента 1, расположенных над центрами оснований первых датчиков 18 каждого блока датчиков до неподвижной (базовой) плоскости соответственно равны Перемещают подвижный элемент вправо (фиг.1) на расстояние, равное дискрете стабилизации В общем случае подвижный элемент 1 после перемещения на расстояние под воздействием возмущающи х факторов займет относительно оснований датчиков 18 и 19 величин зазоров каждого блока датчиков случайное положение. Смещают подвижный элемент 1 по высоте зазора и устанавливают под вторыми датчиками 19 величин зазоров величины зазоров равные соответствующим величинам опорных зазоров Причем, после перемещения подвижного элемента 1 из исходного положения на расстояние точки подвижного элемента 1 расположились над центрами оснований вторых датчиков 19, а после последующей установки под вторыми датчиками 19 величии зазоров, равных соответствующим опорным зазорам, расстояния от эти х точек до базовой плоскости будут равны соответствующим расстояниям в начальном положении подвижного элемента 1 до базовой плоскости Следовательно после перемещения подвижного элемента 1 на расстояние и выполнения описанных выше действий расстояния от точек до базовой плоскости не изменились. Поэтому не изменилось и положение подвижного элемента 1 относительно неподвижной в пространстве базовой плоскости. После первого перемещения подвижного элемента 1 на расстояние и установки под вторыми датчиками 19 величин зазоров равных опорным, не изменяя положения подвижного элемента 1, измеряют величины зазоров под первыми датчиками 18 блоков 12, 13, 14, 15 датчиков и запоминают их в качестве опорных зазоров для установки подвижного элемента 1 в невозмущеиное положение после его второго перемещения на расстояние Приведенные выше действия выполнят на каждой дискрете до перемещения подвижного элемента 1 на заданное расстояние Получают масив опорных зазоров где которые обеспечивают на дискретах стабилизации неизменность положения точек грани подвижного элемента 1 относительно неподвижной плоскости Однако точки подвижного элемента 1, связанного с подвижным элементом 54 замыкающей плоской аэростатической опоры 10, из-за погрешностей размеров и формы изготовления замывающей плоской аэростатической опоры 10, а также под воздействием внешних возмущающи х воздействий могут осуществлять микросмещения и микроповороты в плоскостях, параллельных плоскости вокруг нормали (фиг.2), что приводит к нарушению линейности перемещения подвижного элемента 1. Для обеспечения линейности перемещения подвижного элемента 1 необходимо, чтобы две точки подвижного элемента 54, например, и (фиг.3) перемещались по прямой параллельной плоскости или по прямым, параллельным плоскости Тогда, если одновременно осуществляется стабилизация подвижного элемента 1 относительно плоскости и обеспечивается линейное перемещение двух точек подвижного элемента в плоскости, параллельной плоскости элемент формообразующей системы прецизионного станка, установленный на подвижном элементе 1, будет перемещаться строго линейно. Перемещение двух точек подвижного элемента 54 по прямой (прямым) параллельной (параллельных) плоскости можно осуществить следующим образом. В основании 6 замыкающей плоской аэростатической опоры 10 (фиг.3, 4) дополнительно устанавливают первый блок 38 датчиков линейного перемещения подвижного элемента и второй блок 39 датчиков линейного перемещения подвижного элемента 54. В каждом из упомянутых блоков 38 и 39 датчиков устанавливают датчики и величин зазоров соответственно. Блоки 38 и 39 датчиков в основании 6 устанавливают так, чтобы основания датчиков лежали в одной плоскости, а центры оснований этих да тчиков лежали над прямой, параллельной плоскости Центры оснований датчиков попарно могут также лежать на параллельных прямых, параллельных плоскости Рядом с первым блоком 38 и вторым блоком 39 датчиков линейного перемещения подвижного элемента 54 устанавливают регуляторы 40 и 41 линейности перемещения подвижного элемента (фиг.3), по роликам 32 которых перемещается подвижный элемент 54. При подаче на регуляторы линейности перемещения подвижного элемента сигналов управления их пьезостолбы изменяют свою длину и, следовательно, изменяют положение подвижного элемента 54. Поэтому, подачей соответствующи х сигналов управления на регуляторы линейности перемещения, можно обеспечить перемещение точек и по прямой параллельной плоскости (фиг.2, 3). Пусть подвижный элемент 54, а, следовательно, и укрепленный на нем подвижный элемент 1, смещен в крайнее левое положение (фиг.4), которое принимают в качестве его начального положения. Расстояния между центрами оснований датчиков в каждом блоке 38 и 39 датчиков линейного перемещения подвижного элемента 54 равны между собой и равны дискрете стабилизации (дискрете управления перемещением В начальном положении подвижного элемента 54 (фиг.4) измеряют и запоминают в качестве опорных зазоры и под первыми датчиками и блоков 38 и 39 датчиков линейного перемещения подвижного элемента 54. Смещают подвижный элемент 54 по направлению перемещения на расстояние и устанавливают точку над центром основания датчика а точку (фиг.4) над центром датчика Подают сигналы управления на регуляторы линейности 40 и 41 перемещения подвижного элемента 54 и под датчиками и устанавливают величины зазоров и равные величинам опорных зазоров под первыми датчиками и в начальном положении подвижного элемента 54: В результате после перемещения подвижного элемента 54 на первую дискрету стабилизации прямая относительно прямой проходящей через центры оснований датчиков сместится по блоков 38 и 39 датчиков, направлению перемещения на расстояние параллельно самой себе (фиг.4). Следовательно, точки после первого перемещения на дискрету будут лежать на тех же прямых и параллельных прямой на которых они лежали в начальном положении подвижного элемента 54. Пренебрегая нелинейностью перемещения точек и внутри дискреты стабилизации можно считать, что эти точки переместились на расстояние по прямым, параллельным прямой После установки подвижного элемента в положение, удовлетворяющее равенствам (1), измеряют величины зазоров и запоминают их в качестве опорных зазоров для установки уровня подвижного элемента после второй дискреты перемещения. Смещают подвижный элемент 54 на вторую дискрету перемещения и устанавливают под датчиком и величины зазоров что обеспечивает перемещение точек и на прямые параллельные прямой после перемещения, подвижного элемента 54 на расстояние 21. Описанный выше процесс выполняют на каждой дискрете перемещения подвижного элемента 54 где заданная величина перемещения подвижного элемента 54. В результате получают множество величин опорных зазоров обеспечивающих установку точек на прямые параллельные прямой В процессе рабочего перемещения элемента формообразующей системы станка на интервалах подвижного элемента зазоров перемещения сравнивают величины под датчиками величинами опорных зазоров соответственно. величин зазоров и и Пои с и отклонении от величин опорных зазоров и на регуляторы линейности перемещения подвижного элемента формируют сигналы управления и и обеспечивают перемещение точек по прямым параллельных прямой Так как при перемещении подвижного элемента осуществляется также его стабилизация относительно плоскости (фиг.2), элемент формообразующей системы станка будет перемещаться линейно. При этом нелинейность перемещения не превышает нелинейности его перемещения на дискрете управления перемещением определяется точностью изготовления плоской и замыкающей плоской аэростатических опор и величиной дискреты управления перемещением и может не превышать 0,1мкм. На фиг.1 показана иллюстрация метода опорных зазоров; на фиг.2 - аэростатическая опора (поперечное сечение); на фиг.3 аэростатическая опора (с регуляторами линейности перемещения подвижного элемента и блоками датчиков положения и линейного перемещения подвижного элемента); на фиг.4 иллюстрация метода формирования линейной траектории перемещения подвижного элемента замыкающей плоской аэростатической опоры; на фиг.5 - основание плоской аэростатической опоры с блоками датчиков положения подвижного элемента; на фиг. 6 - основание плоской аэростатической опоры с регуляторами положения подвижного элемента; на фиг.7 - устройство для линейных перемещений (механическая часть); на фиг.8 основание замыкающей плоской аэростатической опоры с регуляторами линейности перемещения подвижного элемента; на фиг.9 - сечение по Б - Б на фиг.7; на фиг.10 блок датчиков; на фиг.11 - сечение по А - А и В - В на фиг.7; на фиг.12 - ролик подвижного элемента с корпусом; на фиг.13 функциональная электрическая схема устройства для линейных перемещений; на фиг.14 - модуль ввода-вывода Устройство для линейных перемещений содержит подвижный элемент 1, на котором установлен, например, инструмент 2. Подвижный элемент 1 помещен между четырьмя основаниями: основанием 3 (фиг.5), основанием 4 (фиг.6), основанием 5 (фиг.7) и основанием 6 (фиг.8) с зазорами 7 между гранями подвижного элемента 1 и основаниями 3, 4, 5, 6. В каждом основании 3, 4, 5, 6 (фиг.9) выполнены жиклеры 8 подачи газа в зазоры 7. Основание 3 и основание 4 являются неподвижными элементами и образуют с прилегающими к ним гранями подвижного элемента 1 плоскую аэростатическую опору 9, а основания 5 и 6 с прилегающими к ним гранями подвижного элемента 1 образуют замыкающую плоскую аэростатическую опору 10 (фиг.9) и, следовательно, являются неподвижным элементом этой опоры 10. В основании 3 плоской аэростатической опоры 9 (фиг.5) выполнены прямоугольные отверстия 11, боковые стороны которых параллельны боковым сторонам основания 3, что эквивалентно их параллельности направлению перемещения подвижного элемента 1. В каждом отверстии 11 устанавливают, например, блоки 12, 13, 14, 15 датчиков положения подвижного элемента 1. Каждый блок 12, 13, 14, 15 датчиков положения включает корпус 16 (фиг.10), в котором в изоляторах 17 установлен первый датчик 18 величины зазора и второйдатчик 19 величины зазора. Расстояния между центрами оснований датчиков 18 и 19 величин зазоров равны между собой и равны дискрете управления перемещением подвижного элемента 1. Блоки 12, 13, 14, 15 датчиков положения подвижного элемента 1 в основании 3 плоской аэростатической опоры 9 установлены так, чтобы основания первых и вторых датчиков 18 и 19 блоков 12, 13, 14, 15 лежали в одной плоскости. Причем, блоки 12, 13, 14, 15 датчиков положения подвижного элемента 1 могут быть установлены так, чтобы пары оснований датчиков 18 и 19 каждого блока 12, 13, 14,15 датчиков лежали в параллельных между собой плоскостях. В основании 3 (фиг.5) выполнен паз 20, в котором перемещаются стойки 21 (фиг.7), одни концы которых укреплены на подвижном элементе 1, а на других концах эти х стоек 21 установлена измерительная головка 22 датчика 23 величины линейного перемещения подвижного элемента 1. В качестве датчика 23 может использоваться линейный индуктосин, включающий также неподвижную линейку 24. Неподвижная линейка 24 установлена на стойках 25, укрепленных на основании 3. В основании 4 напротив каждого отверстия 11 в основании 3 выполнены четыре отверстия 26 (фиг.11), в которых установлены регуляторы 27, 28, 29, 30 положения подвижного элемента 1 (фиг.6). Причем, боковые стороны отверстий 26 параллельны боковым сторонам основания 4, а каждый регулятор 27, 28, 29, 30 положения подвижного элемента 1 устанавливают напротив того блока 12, 13, 14 или 15 датчиков положения, с которым он связан электрически. Каждый регулятор 27, 28, 29, 30 положения подвижного элемента 1 включает корпус 31 ролика (фиг.11, 12), в котором установлен ролик 32, вращающийся в корпусе 31 на оси 33. По роликам 32 регуляторов 27, 28, 29, 30 перемещается грань подвижного элемента 1. В корпусе 31 ролика в изоляторе 34 установлен пьезостолб 35, упирающийся в регулировочный винт 36 (фиг.11). С помощью регулировочных винтов 36 смещают корпуса 31 ролика и задают подвижному элементу 1 начальное положение. Управление положением подвижного элемента 1 осуществляют подачей сигналов управления на пьезостолбы 35. Регуляторы 27, 28, 29, 30 смонтированы в корпусах 37 (фиг.11), установленных на основании плоской аэростатической опоры 9. Примем, блоки 12, 13, 14, 15 датчиков положения подвижного элемента 1 и регуляторы 27, 28, 29, 30 положения подвижного элемента 1 могут быть установлены на одном из оснований 3 или 4 плоской аэростатической опоры 9. В этом случае также каждый регулятор 27, 28, 29, 30 положения устанавливают рядом с тем из блоков 12, 13, 14, 15 датчиков положения, с которым он связан электрически. В одном из оснований, например, 5, замыкающей плоской аэростатической опоры 10 также выполнены два отверстия 11, в которых устанавливают, например, блок 38 датчиков линейного перемещения подвижного элемента 1 и блок 39 датчиков линейного перемещения подвижного элемента 1 (фиг.7). Причем, боковые стороны отверстий 11 параллельны направлению перемещения подвижного элемента 1, блоки 38 и 39 датчиков устанавливают так, чтобы основания датчиков 18 и 19 блоков 38 и 39 датчиков лежали в одной плоскости. Кроме того, попарно основания датчиков 18 и 19 каждого блока 38 и 39 датчиков могут устанавливаться водной плоскости, а плоскости установки датчиков 18 и 19 блоков 38 и 39 датчиков параллельны между собой. Конструктивно блоки 38 и 39 датчиков линейного перемещения подвижного элемента 1 выполнены также, как и блоки 12, 13, 14, 15 датчиков положения подвижного элемента 1, причем, расстояния между центрами оснований датчиков также равны дискрете управления перемещением В основании 6 замыкающей плоской аэростатической опоры 10 напротив отверстий 11 в основании 5 выполнены, например, два отверстия 26 (фиг.11), в которых установлены, регулятор 40 линейности перемещения подвижного элемента 1 (фиг.8). Конструктивно регуляторы 40 и 41 линейности перемещения подвижного элемента 1 выполнены также, как и регуляторы 27, 28, 29, 30 положения подвижного элемента 1. Каждый регулятор 40, 41 линейности перемещения устанавливают напротив того блока 38 или 39 датчиков, с которым он связан электрически. Причем, блоки 38 и 39 датчиков линейного перемещения и регуляторы 40 и 41 линейности перемещения могут быть установлены на одном из оснований 5 или 6 замыкающей плоской аэростатической опоры (фиг.3). При этом регуляторы 40 и 41 линейности перемещения устанавливают рядом с тем блоком 38 или 39 датчиков линейного перемещения, с которым они связаны электрически (фиг.3). Перемещение подвижного элемента 1 осуществляют с помощью кинематической пары винт-гайка 42 (фиг.7). В состав устройства входит также блок 43 (фиг.13) управления перемещением подвижного элемента 1, обеспечивающий линейное перемещение подвижного элемента 1 путем формирования сигналов управления на регуляторы 27, 28, 29, 30 положения и регуляторы 40, 41 линейности перемещения подвижного элемента 1 по сигналам датчиков 18 и 19 величин зазоров блоков 12, 13, 14, 15 датчиков положения и блоков 38 и 39 датчиков линейного перемещения подвижного элемента 1. В состав блока 43 управления перемещением входят восемь измерителей 44 положения подвижного элемента 1 (фиг.13), которые служат для преобразования величин зазоров под первыми датчиками 18 и вторыми датчиками 19 величин зазоров блоков 12, 13, 14, 15 датчиков положения подвижного элемента 1 в напряжения, соответствующие величинам зазоров между основаниями этих датчиков 18 и 19 и поверхностью подвижного элемента 1. Четыре измерителя 45 линейности перемещения подвижного элемента 1 предназначены для преобразования величин зазоров под первыми датчиками 18 и вторыми датчиками 19 величин зазоров блоков 38 и 39 датчиков линейного перемещения подвижного элемента 1 в напряжения, соответствующие величинам зазоров под этими датчиками. Измерители 44 положения подвижного элемента,1 и измерители 45 линейности перемещения подвижного элемента 1 являются точными измерителями микроперемещений (Гриневич Б.Ф, и др. Измерительные компенсационно-мостовые устройства с емкостными датчиками. - К.: Наук. думка, 1987). В состав блока 43 управления перемещением входит ци фровой блок 46. Цифровой блок 46 предназначен для: - приема, преобразования в цифровой код и отображения на экране дисплея информации измерителей 44 и 45; - формирования сигналов управления и выдачи их на регуляторы 27, 28, 29, 30 положения и на регуляторы 40 и 41 линейности перемещения подвижного элемента 1; - формирования массива опорных зазоров и выдачи их в схему управления положением подвижного элемента 1 в процессе его перемещения. В качестве цифрового блока 46 может использоваться ПЭВМ с модулем ввода-вывода данных для связи с внешними функциональными элементами. Примером такого цифрового блока является ПЭВМ типа 9825 фирмы "ХьюлеттПаккард" смодулем (фиг.14) ввода-вывода данных (Науман Г. и др. Стандартные интерфейсы для измерительной техники. - М.: Мир, 1982. - С.272 - 290). Измеритель 47 величины линейного перемещения подвижного элемента 1 предназначен для измерения текущей величины перемещения подвижного элемента 1 относительно начального положения. В качестве измерителя 47 может использоваться устройство цифровой индикации УЦИ Ф5291. Операционные усилители 48 регуляторов положения подвижного элемента объединены попарно по входам и служат для формирования на выходах каждой пары операционных усилителей 48 одинаковых по величине и противоположных по знаку напряжений, пропорциональных сигналам управления на регуляторы 27, 28, 29, 30 положения подвижного элемента 1, поступающи х из цифрового блока 46. Операционные усилители 49 регуляторов линейности перемещения подвижного элемента 1 также объединены попарно по входам и служат для формирования напряжений на регуляторы 40 и 41 линейности перемещения подвижного элемента 1, пропорциональных сигналам управления на эти регуляторы, поступающих из цифрового блока 46. Переключатели 50 "больше - выключено меньше" служат для изменения полярности сигналов на входах дифференциальных усилителей 51 регуляторов положения подвижного элемента 1, поступающих с операционных усилителей 48, а также для изменения полярности сигналов на входах дифференциальных усилителей 52 регуляторов линейности перемещения подвижного элемента 1, поступающи х с операционных усилителей 49. В положении переключателя 50 "больше" полярность напряжения на входах дифференциальных усилителей 51 и 52 такая, что пьезостолбы 35 регуляторов 27, 28, 29, 30 положения подвижного элемента 1 и регуляторов 40 и 41 линейности перемещения подвижного элемента 1 удлиняется. Подвижный элемент 1 регуляторами 27, 28, 29, 30 смещаются в сторону основания 3 плоской аэростатической опоры 9, а регуляторами 40 и 41 в сторону основания 5 замыкающей плоской опоры 10. В положении переключателей 50 "меньше" полярность напряжения на входах дифференциальных усилителей 51 и 52 изменяется на противоположную. Подвижный элемент 1 смещается в сторону основания 4 плоской опоры 9 и в сторону основания' б замыкающей плоской опоры 10. Переключатель 53 "работа - выключено" в положении "работа" обеспечивает в процессе работы устройства подключение выходов измерителей 44 и 45 по сигналам первых датчиков 18 величин зазоров блоков 12, 13, 14, 15 датчиков и блоков 38 и 39 датчиков к первым входам дифференциальных усилителей 51 и 52, а выходы напряжений опорных зазоров цифрового блока 46 ко вторым входам дифференциальных усилителей 51 и 52, 54 подвижный элемент замыкающей плоской аэростатической опоры, приведенной на фиг.2. В том случае, если требования к линейности перемещения подвижного элемента невысокая, устройство может содержать только три блока датчиков положения элемента 1 и три регулятора положения подвижного элемента 1. Для повышения жесткости подвижного элемента 1 регуляторы положения подвижного элемента 1 могут устанавливаться на обоих основаниях плоской аэростатической опоры 9. При этом регуляторы положения подвижного элемента 1 на основаниях 3 и 4 устанавливают попарно друг против друга и также попарно в противофазе подключают к выходу соотве тствующего дифференциального усилителя 51. Кроме того, для расширения диапазона нагрузок, воспринимаемых подвижным элементом 1, вместо каждого регулятора положения и каждого регулятора линейности перемещения подвижного элемента 1 могут устанавливаться группы параллельно включенных регуляторов линейности перемещения подвижного элемента 1. Причем первые датчики 18 и вторые датчики 19 величин зазоров блоков 12, 13, 14, 15 датчиков положения подвижного элемента 1 соединены с входами измерителей 44 положения подвижного элемента 1, выходы измерителей положения подвижного элемента 1 соединены с входами цифрового блока 46, первые датчики 18 и вторые датчики 19 блоков 38 и 39 датчиков линейного перемещения подвижного элемента 1 соединены с входами измерителей 4 линейности перемещения подвижного элемента 1, выходы измерителей 45 линейности перемещения подвижного элемента 1 соединены с входами цифрового блока 46, выходы измерителей 44 положения подвижного элемента 1 по сигналам первых датчиков 18 величин зазоров блоков 12, 13, 14, 15 датчиков положения подвижного элемента через переключатель 53 "работа - выключено" соединены с первыми входами дифференциальных усилителей 51 регуляторов положения подвижного элемента 1, выходы измерителей 4 линейности перемещения подвижного элемента 1 по сигналам первых датчиков 18 величин зазоров блоков 38 и 39 датчиков перемещения подвижного элемента 1 через переключатель "работа - выключено" соединены с первыми входами дифференциальных усилителей 52 регуляторов линейности перемещения подвижного элемента 1, датчик 23 величины линейного перемещения подвижного элемента 1 соединен с измерителем 47 величины линейного перемещения подвижного элемента 1, выходы измерителя 47 величины линейного перемещения подвижного элемента 1 соединены с входами цифрового блока 46, входы операционных усилителей 48 регуляторов положения подвижного элемента 1 соединены с выходами цифрового блока 46, а выходы операционных усилителей 48 регуляторов положения подвижного элемента 1 через переключатель 50 "больше - выключено - меньше" соединены с входами дифференциальных усилителей 51 регуляторов положения подвижного элемента 1, входы операционных усилителей 49 регуляторов линейности перемещения подвижного элемента 1 соединены с выходами цифрового блока 46, а их вы ходы через переключатели 50 "больше - выключено - меньше" соединены с входами дифференциальных усилителей 52 регуляторов линейности перемещения подвижного элемента 1, выходы цифрового блока 46 через переключатель 53 "работа выключено" соединены с вторыми входами дифференциальных усилителей 51 регуляторов положения подвижного элемента 1 и с вторыми входами дифференциальных усилителей 52 регуляторов линейности перемещения подвижного элемента 1, выходы дифференциальных усилителей 51 регуляторов положения подвижного элемента 1 соединены с пьезостолбами 35 регуляторов 27, 28, 29, 30 положения подвижного элемента 1, выходы дифференциальных усилителей 52 регуляторов линейности перемещения подвижного элемента 1 соединены с пьезостолбами 35 регуляторов 40, 41 линейности перемещения подвижного элемента 1. Устройство для линейных перемещений работает следующим образом. 1. Основания первых датчиков 18 и вторых датчиков 19 величин зазоров блоков 12, 13, 14, 15 датчиков положения подвижного элемента 1, установленных на основании 3 плоской аэростатической опоры 9, и основания первых датчиков 18 и вторых датчиков 19 величины зазоров блоков 38 и 39 датчиков линейного перемещения подвижного элемента 1, установленных на основании 5 замыкающей плоской аэростатической опоры 10 устанавливают в одних плоскостях. Для этого основание 3 плоской аэростатической опоры 9, например, накладывают на эталонную плоскость. С пульта цифрового блока 46 выполняют пуск подпрограммы "Индикация зазоров 1". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 46 последовательно с заданной частотой опрашивает (фиг.13) измерители положения подвижного элемента 1, преобразует выходные сигналы измерителей 44 в цифровые коды и запоминает их в памяти, а также преобразует двоичные коды в десятичные и отображает на экране дисплея. Наблюдают на экране дисплея численные значения величин зазоров под первыми и вторыми датчиками 18 и19 блоков 12, 13, 14, 15 датчиков положения подвижного элемента 1. Если зазоры между основаниями первых и вторых датчиков 18 и 19 и эталонной плоскостью не равны между собой, смещают датчики 18 и 19 блоков 12, 13, 14, 15 датчиков по высоте, зазора, считывая значения величин зазоров с экрана дисплея, устанавливают под первыми и вторыми датчиками 18 и 19 этих блоков датчиков одинаковые величины зазоров относительно эталонной плоскости. Следовательно, основания первых и вторых датчиков 18 и 19 блоков 12, 13, 14, 15 датчиков положения подвижного элемента 1 будут установлены в одной плоскости. На эталонную плоскость накладывают основание 5 замыкающей плоской аэростатической опоры 10 и с пульта цифрового блока 46 выполняют пуск подпрограммы "Индикация зазоров 2". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 46 последовательно с заданной частотой (фиг.13) опрашивает измерители 4 линейности перемещения подвижного элемента 1, преобразует выходные сигналы измерителей 45 в цифровые двоичные коды и запоминает их, а также преобразует двоичные коды в десятичные и отображает их на экране дисплея. Наблюдают на экране дисплея численные значения величин зазоров под первыми и вторыми Датчиками 18 и 19 блоков 38 и 39 датчиков линейного перемещения подвижного элемента, 1. Если зазоры под первыми и вторыми датчиками 18 и 19 блоков 38 и 39 датчиков линейного перемещения не равны, смещают датчики 18 и 19 этих блоков датчиков по высоте зазора и, считывая величины зазоров с экрана дисплея, устанавливают первые и вторые датчики 18 и 19 блоков 38 и 39 датчиков линейного перемещения с одинаковыми зазорами относительно эталонной плоскости. Основания первых датчиков 18 и вторых датчиков 19 блоков 38 и 39 датчиков линейного перемещения будут установлены в одной плоскости. 2. Задают подвижному элементу 1 устройства для линейных перемещений начальное положение относительно блоков 12, 13, 14, 15 датчиков положения и блоков 38 и 39 датчиков линейного перемещения подвижного элемента 1. Для этого подвижный элемент 1 с помощью винтовой кинематической пары 42 (фиг.7) смещают в исходное (крайнее верхнее) положение и устанавливают, например, под первыми датчиками 18 блоков 12, 13, 14, 15 датчиков положения и под первыми датчиками 18 блоков 38 и 39 датчиков линейного перемещения подвижного элемента 1 равные величины зазоров, равные Причем величина больше расчетной величины зазоров в опоре 9 и замыкающей опоре 10, что обеспечивает прилегание граней подвижного элементе 1 к роликам 32 регуляторов 27, 28, 29, 30, 40, 41 на всей длине перемещения подвижного элемента 1. Для выполнения этих действий включают устройство для линейных перемещений. Переключатель 53 "включено - выключено" устанавливают в положение "выключено" и отключают измерители 44 положения от первых входов дифференциальных усилителей 51, измерители 4 линейности перемещения от первых входов дифференциальных усилителей 52, а цифровой блок 46 - от вторых входов дифференциальных усилителей 51 и 52. Переключатели 50 "больше - выключено - меньше" устанавливают в' положение "выключено" и отключают выходы операционных усилителей 48 и 49 от входов дифференциальных усилителей 51, 52. С пульта цифрового блока 46 выполняют пуск подпрограммы "Индексация зазоров". В результате на экране дисплея наблюдают численные значения величин зазоров под датчиками 18 и 19 блоков 12, 13, 14, 15, 38, 39 датчиков положения и линейного перемещения подвижного элемента 1. Наблюдая величины зазоров на экране дисплея, с помощью регулировочных винтов 36 регуляторов 27, 28, 29, 30, 40, 41 под первыми датчиками 18 блоков 12, 13, 14, 15, 38, 39 датчиков устанавливают величины зазоров, равные ZH. С пульта цифрового блока 46 выполняют пуск подпрограммы "Запись опорных зазоров". В соответствии с алгоритмом работы этой подпрограммы коды величин зазоров под первыми датчиками 18 блоков 12, 13, 14, 15 датчиков положения перемещаются в памяти цифрового бока 46 в первую, вторую, третью, четвертую ячейки первого массива опорных элементов. Получают Коды величин зазоров под первыми датчиками 18 блоков 38 и 39 датчиков линейного перемещения перемещаются в памяти цифрового блока 46 в первую и вторую ячейки второго массива опорных зазоров. Получают и 3. Подвижный элемент 1 из начального (исходного) положения смещают на величину дискреты управления перемещением. На величину дискреты управления перемещением подвижный элемент 1 смещают с помощью кинематической пары 42 винт-гайка, а величину перемещения задают по цифровому индикатору измерителя 47 величины линейного перемещения УЦИ Ф5291. 4. На расстоянии подвижного элемента 1 относительно исходного положения род вторыми датчиками 19 блоков 12, 13, 14, 15 датчиков положения подвижного элемента 1 устанавливают величины зазоров равные величинам опорных зазоров соответственно и устанавливают подвижный элемент 1 в не возмущенное положение относительно базовой плоскости Под вторыми датчиками 19 блоков 38 и 39 датчиков линейного перемещения подвижного элемента 1 устанавливают величины зазоров и равные величинам Если эти зазоры равны, с пульта цифрового блока 46 выполняют пуск подпрограммы "Запись опорных зазоров 1". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 46 опрашивает измерители 44 положения подвижного элемента 1 по сигналам первых датчиков 18 (фиг.13), преобразует сигналы измерителей 44 в цифровые двоичные коды и пересылает их в пятую, шестую, седьмую и восьмую ячейку первого массива опорных зазоров. Получают Если зазоры под первыми датчиками 18 не равны соответствующим опорным зазорам, на пульте цифрового блока 46 набирают коды сигналов управления на регуляторы 27, 28, 29, 30 положения подвижного элемента 1 и адреса 0001, 0010, 0011, 0100, операционных усилителей 48, электрически связанных с регуляторами 27, 28, 29, 30 положения подвижного элемента 1 соответственно. Адрес 0001 определяет выдачу сигнала управления на операционные усилители 48, электрически связанные с регулятором 27 положения, 0010 - выдачу сигнала управления на операционные усилители 48, электрически связанные с регулятором 28 положения, 0011 - выдачу сигнала управления на электрически операционные связанные с усилители регулятором 48, 29 опорных зазоров и соответственно, и устанавливают точки подвижного элемента 1 на те же прямые параллельные прямой параллельной плоскости которым эти точки принадлежали в начальном положении подвижного элемента 1 (фиг.4). Не изменяя положения подвижного элемента положения, 0100 выдачу на операционные усилители 48, электрически связанные с регулятором 30 положения подвижного элемента 1. С пульта цифрового блока 46 выполняют пуск подпрограммы "Установка зазоров 1". В соответствии с алгоритмом работы этой подпрограммы коды сигналов управления 1 преобразуются цифровым блоком 46 в напряжения сигналов управления и поступают в соотве тствии с адресами на операционные усилители 48, а с их выходов через переключатели 50 "больше выключено - меньше" в положении "больше" или "меньше" поступают на входы дифференциальных усилителей 51 регуляторов положения подвижного элемента 1. С выходов дифференциальных усилителей 51 сигналы поступают на пьезостолбы 35 регуляторов 27, 28, 29, 30 положения подвижного элемента 1, соответственно, и изменяют положение подвижного элемента 1 в зависимости от величины сигнала управления и положения переключателя 50. С пульта цифрового блока 46 выполняют пуск подпрограммы "Индикация зазоров" и по экрану дисплея проверяют равенство зазоров под вторыми датчиками 19 блоков 12, 13, 14, 15 датчиков величинам соответствующи х опорных зазоров: измеряют величины зазоров под первыми датчиками 18 блоков 12, 13, 14, 15 датчиков положения подвижного элемента 1 и блоков 38, 39 датчиков линейности перемещения подвижного элемента 1 и запоминают их в качестве опорных зазоров для установки подвижного элемента 1 в невозмущенное положение на второй дискрете управления перемещением подвижного элемента 1. Для выполнения этих действий с пульта цифрового блока 46 выполняют пуск подпрограммы "Индикация зазоров". В результате работы этой подпрограммы на экране дисплея наблюдают численные значения величин зазоров под датчиками 18 и 19 блоков 12, 13, 14, 15 датчиков положения и блоков 38 и 39 датчиков линейного перемещения подвижного элемента 1. Сравнивают величины зазоров под вторыми датчиками 19 блоков 12. 13. 14. 15 датчиков положения Методом последовательных изменяя сигналы управления на регуляторы 27, 28, 29, 30 положения и используя приближений, с величинами опорных зазоров переключатели 50, добиваются выполнения этих равенств и выполняют пуск подпрограммы "Запись опорных зазоров 1". В результате в пятую, шестую, седьмую, восьмую ячейки первого массива опорных зазоров будут записаны величины опорных зазоров для установки подвижного элемента 1 в невозмущенное положение на второй дискрете управления перемещением. С пульта цифрового блока выполняют пуск подпрограммы "Индикация зазоров" и, наблюдая численные значения величин зазоров на экране дисплея, сравнивают величины зазоров под вторыми датчиками 19 блоков 38 и 39 датчиков с величинами опорных зазоров и Если эти зазоры равны, с пульта цифрового блока 46 выполняют пуск подпрограммы "Запись опорных зазоров 2". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 46 опрашивает измерители 45 линейности перемещения подвижного элемента 1 по сигналам первых датчиков 18 (фиг.13), преобразует сигналы измерителей 45 в опорных зазоров: Если эти равенства не выполняются, методом последовательных приближений, изменяя сигналы управления и на регуляторы 40 и 41 и используя переключатели 50, добиваются выполнения этих равенств и выполняют пуск подпрограммы "Запись опорных зазоров 2". В результате в третью и четвертую ячейку второго массива опорных зазоров будут записаны величины опорных зазоров и для установки подвижного элемента 1 в не возмущенное положение на второй дискрете управления перемещением. 5. П.4 выполняют после каждого перемещения подвижного элемента 1 на расстояние (на расстояниях и получают первый и второй массивы опорных зазоров. цифровые двоичные коды и и пересылает их в третью и четвертую ячейки второго массива опорных зазоров. Получают и Если зазоры под вторыми датчиками 19 блоков 38 и 39 датчиков не равны опорным зазорам и на пульте цифрового блока 46 набирают коды сигналов управления и на регуляторы 40 и 41 линейности перемещения подвижного элемента 1 соответственно и адреса 0101, 0110 операционных усилителей 49, электрически связанных с регуляторами 40 и 41. Адрес 0101 определяет выдачу сигнала управления на операционные усилители 49, электрически связанные с регулятором 40, 0110 - выдачу сигнала управления на операционные усилители 49, электрически связанные с регулятором 41. С пульта цифрового блока 46 выполняют пуск подпрограммы "Установка зазоров 2". В соответствии с алгоритмом работы этой подпрограммы коды сигналов управления и преобразуются цифровым блоком 46 в напряжения сигналов управления и поступают в соответствии с адресами на операционные усилители 49, а с и х вы ходов через переключатели 50 "больше - выключено меньше" в положении "больше" или "меньше" поступают на входы дифференциальных усилителей 52 регуляторов линейности перемещения подвижного элемента 1. С выходов дифференциальных усилителей 52 сигналы поступают на пьезостолбы 35 регуляторов 40 и 41 соответственно и изменяют положение подвижного элемента 1 в зависимости от величины сигнала управления положения переключателя 50. С пульта цифрового блока 46 выполняют пуск подпрограммы "Индикация зазоров" и по экрану дисплея проверяют равенство зазоров под вторыми датчиками 19 блоков 38 и 39 датчиков величинами соответствующи х 6. Работа устройства в процессе линейного перемещения. Перед началом работы подвижный элемент 1 устанавливают в исходное положение. Переключатели 50 "больше - выключено меньше" устанавливают в положение "выключено" и отключают выходы операционных усилителей 48 и 49 от входов дифференциальных усилителей 51 и 52. Переключатель 53 "работа - выключено" устанавливают в положение "работа" и подключают измерители 44 по сигналам первых датчиков 18 блоков 12, 13, 14, 15 датчиков к первым входам дифференциальных усилителей 51, измерители 45 по сигналам первых датчиков 18 блоков 38 и 39 датчиков к первым входам дифференциальных усилителей 52, а ко вторым входам дифференциальных усилителей 51 и 52 подключают соответствующие выходы напряжений опорных зазоров цифрового блока 46 (фиг.13). С пульта цифрового блока 46 вводят заданную величину перемещения подвижного элемента 1 и выполняют пуск подпрограммы "линейное перемещение". В соответствии с алгоритмом работы этой подпрограммы код величины опорного зазора считывается из первого массива опорных зазоров, преобразуется в напряжение опорного зазора и поступает на второй вход дифференциального усилителя 51 регулятора 27 положения подвижного элемента 1 (фиг.13), код величины опорного зазора преобразуется в напряжение опорного зазора и поступает на второй вход дифференциального усилителя 51 регулятора 28 положения подвижного элемента 1, код величины опорного зазора преобразуется в напряжение опорного зазора и поступает на второй вход дифференциального усилителя 51 регулятора 29 положения подвижного элемента 1, код величины опорного зазора преобразуется в напряжение опорного зазора и поступает на второй вход ди фференциального усилителя 51 регулятора 30 положения подвижного элемента 1, код величины опорного зазора считывается из второго массива опорных зазоров цифрового блока 46, преобразуется в напряжение опорного зазора и поступает на второй вход ди фференциального усилителя 52 регулятора 40 линейности перемещения подвижного элемента 1, код величины опорного зазора преобразуется в напряжение опорного зазора и поступает на второй вход дифференциального усилителя 52 регулятора 41 линейности перемещения подвижного элемента 1. На первый вход дифференциального усилителя 51 регулятора 27 положения поступает сигнал с измерителя 44 положения подвижного элемента 1 по сигналу первого датчика 18 блока 12 датчиков. На первый вход дифференциального усилителя 51 регулятора 28 положения поступает сигнал с измерителя 44 положения подвижного элемента 1 по сигналу первого датчика 18 блока 13 датчиков. На первый вход дифференциального усилителя 51 регулятора 29 положения поступает сигнал с измерителя 44 положения подвижного элемента 1 по сигналу первого датчика 18 блока 14 датчиков. На первый вход дифференциального усилителя 51 регулятора 30 положения поступает сигнал с измерителя 44 положения подвижного элемента 1 по сигналу первого датчика 18 блока 15 датчиков. На первый вход дифференциального усилителя 52 регулятора 40 линейности перемещения поступает сигнал с измерителя 45 линейности перемещения подвижного элемента 1 по сигналу первого датчика 18 блока 38 датчиков. На первый вход дифференциального усилителя 52 регулятора 41 линейности перемещения поступает сигнал с измерителя 45 линейности перемещения подвижного элемента 1 по сигналу первого датчика 18 блока 39 датчиков. Если зазоры под первыми датчиками 18 блоков 12, 13, 14, 15 датчиков положения не равны соответствующим опорным зазорам а зазоры под первыми датчиками 18 блоков 38, 39 датчиков линейности перемещения не равны соответствующим опорным зазорам на выходах соответствующи х дифференциальных усилителей 51 и 52 возникают разности потенциалов, пропорциональные величинам отклонений зазоров под первыми датчиками 18 блоков 12, 13, 14, 15 и 38, 39 датчиков от соответствующи х величин опорных зазоров, которые поступают на пьезостолбы 35 регуляторов 27, 28, 29, 30 положения и регуляторов 40 и 41 линейности перемещения подвижного элемента 1. В результате длины пьезостолбов 35 будут изменяться на столько, чтобы величины зазоров под первыми датчиками 18 блоков 12, 13, 14, 15 датчиков и под первыми датчиками 18 блоков 38 и 39 датчиков стали равными соответствующим опорным зазорам, а точки подвижного элемента 1 заняли начальное положение относительно базовой плоскости и прямой Перемещают подвижный элемент 1 на заданное расстояние В процессе перемещения сигнал датчика 23 величины линейного перемещения подвижного элемента 1 преобразуется измерителем 47 УЦИ Ф5291 в цифровой двоичный код величины перемещения подвижного элемента 1. Причем, двоичный код величины текущего перемещения подвижного элемента 1 в измерителе 47 УЦИ Ф5291 формируется с частотой 10кГц и с сигналом "наличия информации ИНИ поступает в цифровой блок 46. В соответствии с алгоритмом подпрограммы "Линейное перемещение" по сигналу ИНИ код величины текущего перемещения подвижного элемента 1 сравнивается с расстоянием до очередной перемещения дискреты коррекции линейности подвижного элемента где - допустимая величина отклонения текущего положения подвижного элемента 1 от дискреты коррекции. При выполнении неравенства из пятой, шестой, седьмой, восьмой ячеек первого массива опорных зазоров считываются коды опорных зазоров преобразуются в напряжения и поступают на вторые входы соответствующи х ди фференциальных усилителей 51, а из третьей и четвертой ячеек второго массива опорных зазоров считываются коды опорных зазоров и преобразуются в напряжения и поступают на вторые входы соответствующи х усилителей 52. Подвижный элемент 1 на начале второй дискреты управления перемещением будет возвращен на линейную траекторию перемещения. Процесс управления перемещением подвижного элемента 1 заканчивается при выполнении неравенства Погрешность линейности перемещения подвижного элемента 1 не превышает максимальной погрешности линейности перемещения на дискрете управления перемещением и может не превышать 0,1мкм.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for linear displacements
Автори англійськоюShepelev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюУстройство для линейный перемещений
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: переміщень, лінійних, пристрій
Код посилання
<a href="https://ua.patents.su/13-14904-pristrijj-dlya-linijjnikh-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Пристрій для лінійних переміщень</a>
Пристрій для калібровки вимірювача лінійних переміщень
Номер патенту: 2657
Опубліковано: 26.12.1994
Автори: Фурман Данило Михайлович, Хазанович Володимир Давидович, Цибулько Вадим Йосипович, Метельов Леонід Дмитрович, Ткаченко Леонід Іванович
МПК: G01N 27/00, G01B 7/14
Мітки: калібровки, переміщень, лінійних, пристрій, вимірювача
Формула / Реферат:
Устройство для калибровки измерителя линейных перемещений, содержащее установленную на оснований скобу с двумя соосными отверстиями, в одном из которых установлен узел задания эталонного перемещения с подвижным стержнем, в другом — узел крепления калибруемого измерителя, отличающееся тем, что, с целью повышения точности калибровки, оно снабжено электронагревателем, узел крепления калибруемого измерителя выполнен в виде сменного цангового...
Пристрій для вимірювання лінійних переміщень
Номер патенту: 7444
Опубліковано: 29.09.1995
Автори: Мельник-Куцин Юрій Полікарпович, Ахмалкин Євген Павлович, Карасьов Володимир Сергійович, Коробко Георгій Самуілович
МПК: G01N 27/00, G01B 7/00
Мітки: переміщень, вимірювання, пристрій, лінійних
Формула / Реферат:
1. Устройство для измерения линейных перемешений, содержащее источник питания, измерительный блок, трансформаторный датчик, выполненный в виде расположенных в общем корпусе трех соосных катушек, из которых крайние неподвижны, включены электрически последовательно-встречно и подключены к источнику питания, а средняя установлена с возможностью линейного перемещения вдоль оси датчика и подключена к измерительному блоку, и узел эталонного...
Пристрій для калібровки вимірювача лінійних переміщень
Номер патенту: 358
Опубліковано: 30.04.1993
Автори: Літовка Лідія Михайлівна, Цибулько Вадим Йосипович, Росліков Олександр Фірсович, Меншиков Сергій Миколайович, Метельов Леонід Дмитрович
МПК: G01B 7/14
Мітки: калібровки, переміщень, вимірювача, пристрій, лінійних
Формула / Реферат:
Формула изобретенияУстройство для калибровки измерителя линейных перемещений по авт. св. №1580152, отличающееся тем, что, с целью расширения области применения за счет обеспечения калибровки на нем измерителей виброперемещений, оно снабжено последовательно соединенными катушкой индуктивности, переменным резистором и электронным ключом, последовательно соединенными генератором периодического сигнала и формирователя импульсов, выход...
Пристрій для вимірювання лінійних розмірів об’єкту
Номер патенту: 5080
Опубліковано: 28.12.1994
Автори: Гоцалюк Юрій Борисович, Значковський Борис Миколайович, Осецький Юрій Михайлович
МПК: G01B 11/00, G01B 7/02
Мітки: об'єкту, лінійних, вимірювання, пристрій, розмірів
Формула / Реферат:
Устройство для измерения линейных размеров объектов, содержащее выполненные в виде поворотных трансформаторов датчики положения точек поверхности объекта, источник опорного сигнала и схему суммирования со входами, подключенными к выходам датчиков и источника опорного сигнала, отличающееся тем, что, с щелью обеспечения независимости выходного сигнала от количества включенных датчиков и повышения точности измерения, источник опорного...
Індуктивний датчик лінійних переміщень

Номер патенту: 3418
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 5/14
Мітки: переміщень, лінійних, датчик, індуктивний
Формула / Реферат:
Индуктивный датчик линейных перемeщений, содержащий корпус, смонтированные в нем соосные катушки индуктивностей, коаксиально установленный в них якорь, установленный в корпусе с помощью шарнира измерительный рычаг, один конец которого скреплен с якорем, закрепленный на другом конце измерительного рычага щуп и средство крепления на объекте контроля, отличающийся тем, что, с целью упрощения конструкции и повышения удобств при эксплуатации,...
Попередній патент: Спосіб виробництва гречаного солоду
Наступний патент: Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення
Випадковий патент: Пневматична висівна система