Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення
Номер патенту: 14905
Опубліковано: 04.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
Формула / Реферат
1. Способ стабилизации положения подвижного элемента аэростатической, направляющей, включающий регулирование величин зазоров между основанием подвижного элемента и поверхностью неподвижного элемента, отличающийся тем, что в подвижном элементе аэростатической направляющей, установленном в начальном положении, закрепляют не менее трех блоков датчиков величин зазоров, включающих каждый по два датчика величины зазора, расположенных на одинаковом расстоянии между центрами оснований этих датчиков, равном дискрете стабилизации подвижного элемента аэростатической направляющей, при этом основания упомянутых датчиков размещают в одной или в параллельных между собой плоскостях, измеряют зазоры под первыми в направлении перемещения подвижного элемента датчиками, а в процессе перемещения подвижного элемента на каждой дискрете стабилизации подвижного элемента - под вторыми в направлении перемещения подвижного элемента датчиками, устанавливают величины зазора в равные величинам зазоров под первыми датчиками на предыдущей дискрете стабилизации и помещают подвижный элемент на текущей дискрете стабилизации в невозмущенное положение относительно неподвижной в пространстве плоскости параллельной плоскости установки оснований датчиков, получают исходные величины зазоров, по которым осуществляют корректировку положения подвижного элемента на каждой дискрете стабилизации в процессе его рабочего перемещения.
2. Устройство стабилизации положения подвижного элемента аэростатической направляющей, содержащее подвижный и неподвижный элементы, образующие аэростатическую направляющую, регуляторы давления в газовом слое и толкатель прямого хода, толкатель обратного хода, отличающееся тем, что оно снабжено жиклерами подачи газа в зазоры замкнутой аэростатической опоры, выполненными в подвижном элементе, на поверхности которого установлены, по крайней мере, три блока датчиков величин зазора, в каждом упомянутом блоке размещены первый и второй датчики величин зазоров между основаниями этих датчиков и поверхностью неподвижного элемента, на этой же поверхности установлены не менее трех отдельных регуляторов давления или параллельно подключенных групп регуляторов давления по числу, блоков датчиков величин зазоров, причем каждый регулятор давления электрически связан с соответствующим блоком датчиков величин зазоров через введенный в устройство блок стабилизации положения подвижного элемента, включающий цифровой блок, операционные усилители, переключатели, дифференциальные усилители, устройство управления толкателями, причем первые и вторые датчики величин зазоров каждого блока датчиков величин зазоров соединены с входами измерителей величин зазоров, выходы измерителей величин зазоров соединены с входами цифрового блока, выходы измерителей величин зазоров по сигналам первых датчиков величин зазоров через переключатель "работа - выключено" соединены с входами дифференциальных усилителей, входы толкателя прямого хода соединены с выходами устройства управления толкателями, а его выход соединен с входом устройства управления толкателями, входы толкателя обратного хода соединены с выходами устройства управления толкателями, а его выход соединен со входом устройства управления толкателями, выходы устройства управления толкателями соединены со входами цифрового блока, входы операционных усилителей соединены с выходами цифрового блока, выходы операционных усилителей через переключатель "больше - выключено - меньше" соединены с входами соответствующих дифференциальных усилителей, вторые входы дифференциальных усилителей через переключатель "работа - выключено" соединены с выходами цифрового блока, выходы дифференциальных усилителей соединены с регуляторами давления.
Текст
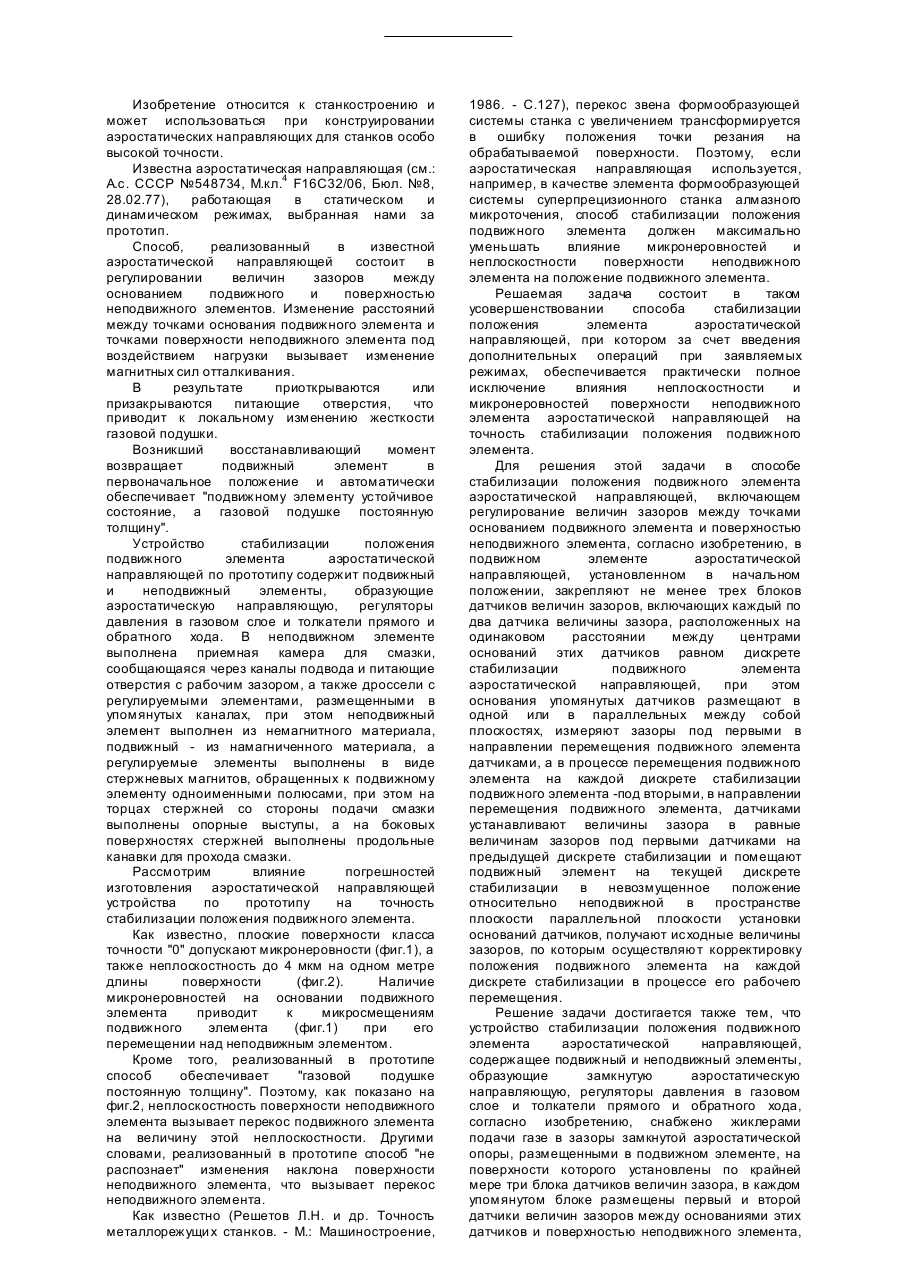
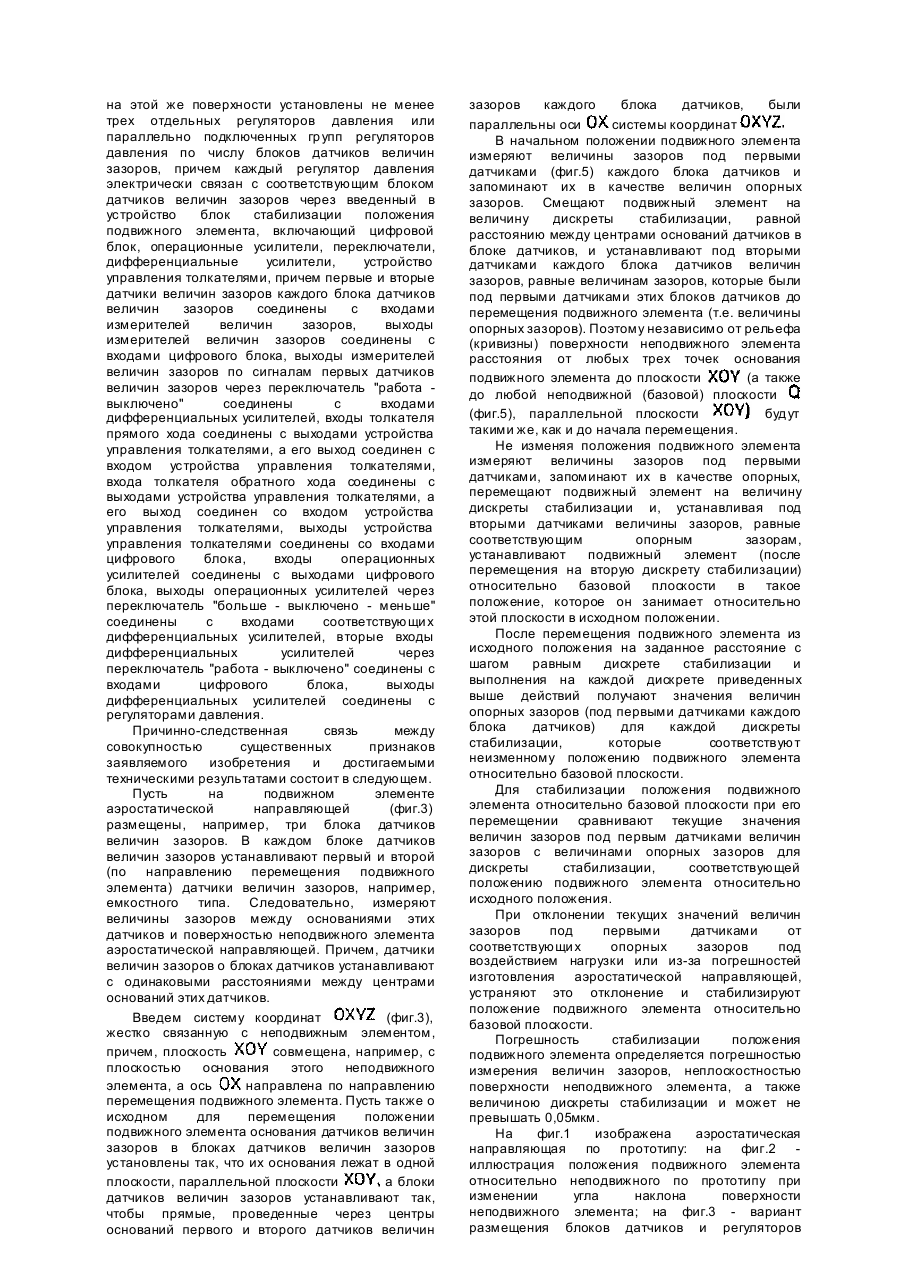
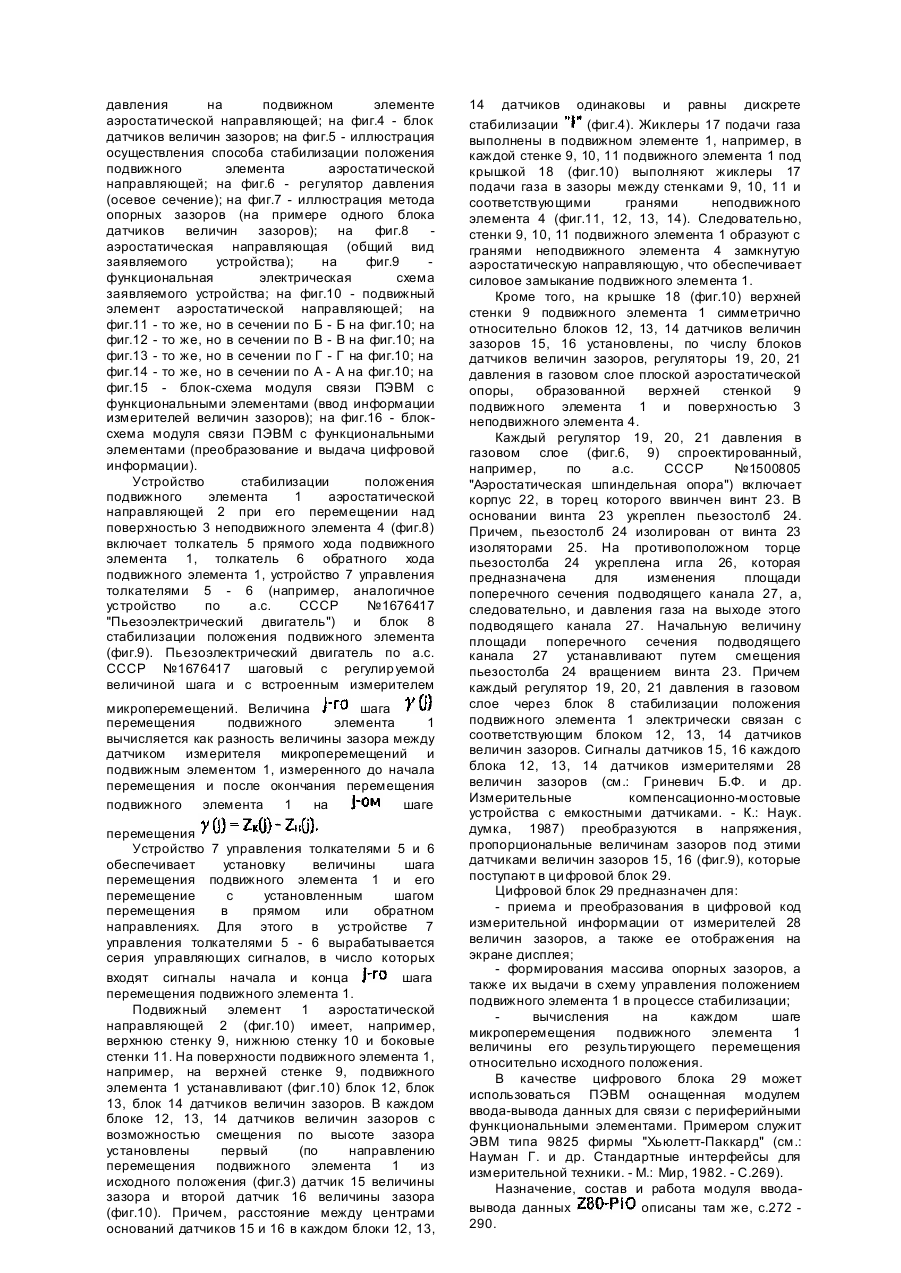
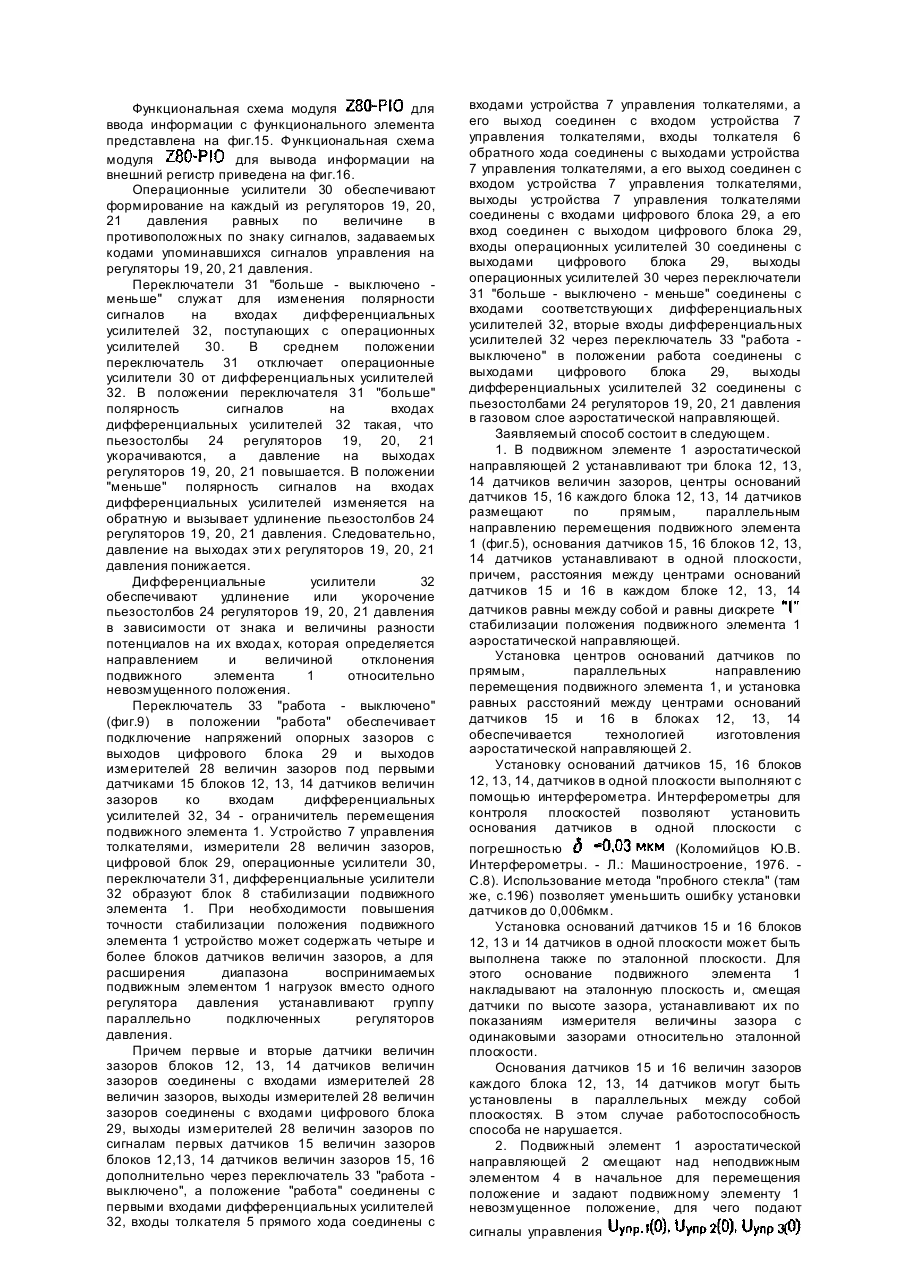
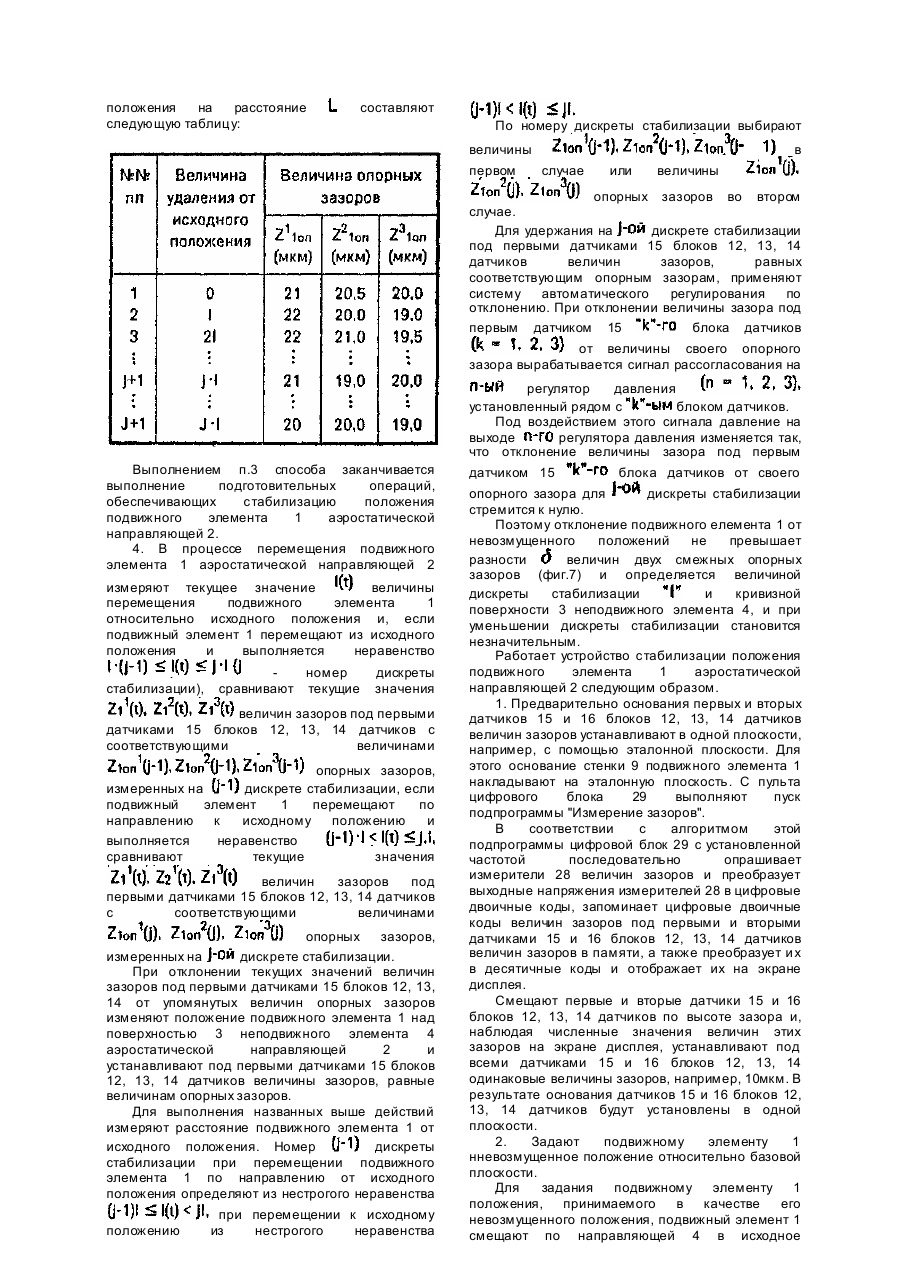
Изобретение относится к станкостроению и может использоваться при конструировании аэростатических направляющих для станков особо высокой точности. Известна аэростатическая направляющая (см.: А.с. СССР №548734, М.кл.4 F16C32/06, Бюл. №8, 28.02.77), работающая в статическом и динамическом режимах, выбранная нами за прототип. Способ, реализованный в известной аэростатической направляющей состоит в регулировании величин зазоров между основанием подвижного и поверхностью неподвижного элементов. Изменение расстояний между точками основания подвижного элемента и точками поверхности неподвижного элемента под воздействием нагрузки вызывает изменение магнитных сил отталкивания. В результате приоткрываются или призакрываются питающие отверстия, что приводит к локальному изменению жесткости газовой подушки. Возникший восстанавливающий момент возвращает подвижный элемент в первоначальное положение и автоматически обеспечивает "подвижному элементу устойчивое состояние, а газовой подушке постоянную толщину". Устройство стабилизации положения подвижного элемента аэростатической направляющей по прототипу содержит подвижный и неподвижный элементы, образующие аэростатическую направляющую, регуляторы давления в газовом слое и толкатели прямого и обратного хода. В неподвижном элементе выполнена приемная камера для смазки, сообщающаяся через каналы подвода и питающие отверстия с рабочим зазором, а также дроссели с регулируемыми элементами, размещенными в упомянутых каналах, при этом неподвижный элемент выполнен из немагнитного материала, подвижный - из намагниченного материала, а регулируемые элементы выполнены в виде стержневых магнитов, обращенных к подвижному элементу одноименными полюсами, при этом на торцах стержней со стороны подачи смазки выполнены опорные выступы, а на боковых поверхностях стержней выполнены продольные канавки для прохода смазки. Рассмотрим влияние погрешностей изготовления аэростатической направляющей устройства по прототипу на точность стабилизации положения подвижного элемента. Как известно, плоские поверхности класса точности "0" допускают микронеровности (фиг.1), а также неплоскостность до 4 мкм на одном метре длины поверхности (фиг.2). Наличие микронеровностей на основании подвижного элемента приводит к микросмещениям подвижного элемента (фиг.1) при его перемещении над неподвижным элементом. Кроме того, реализованный в прототипе способ обеспечивает "газовой подушке постоянную толщину". Поэтому, как показано на фиг.2, неплоскостность поверхности неподвижного элемента вызывает перекос подвижного элемента на величину этой неплоскостности. Другими словами, реализованный в прототипе способ "не распознает" изменения наклона поверхности неподвижного элемента, что вызывает перекос неподвижного элемента. Как известно (Решетов Л.Н. и др. Точность металлорежущи х станков. - М.: Машиностроение, 1986. - С.127), перекос звена формообразующей системы станка с увеличением трансформируется в ошибку положения точки резания на обрабатываемой поверхности. Поэтому, если аэростатическая направляющая используется, например, в качестве элемента формообразующей системы суперпрецизионного станка алмазного микроточения, способ стабилизации положения подвижного элемента должен максимально уменьшать влияние микронеровностей и неплоскостности поверхности неподвижного элемента на положение подвижного элемента. Решаемая задача состоит в таком усовершенствовании способа стабилизации положения элемента аэростатической направляющей, при котором за счет введения дополнительных операций при заявляемых режимах, обеспечивается практически полное исключение влияния неплоскостности и микронеровностей поверхности неподвижного элемента аэростатической направляющей на точность стабилизации положения подвижного элемента. Для решения этой задачи в способе стабилизации положения подвижного элемента аэростатической направляющей, включающем регулирование величин зазоров между точками основанием подвижного элемента и поверхностью неподвижного элемента, согласно изобретению, в подвижном элементе аэростатической направляющей, установленном в начальном положении, закрепляют не менее трех блоков датчиков величин зазоров, включающих каждый по два датчика величины зазора, расположенных на одинаковом расстоянии между центрами оснований этих датчиков равном дискрете стабилизации подвижного элемента аэростатической направляющей, при этом основания упомянутых датчиков размещают в одной или в параллельных между собой плоскостях, измеряют зазоры под первыми в направлении перемещения подвижного элемента датчиками, а в процессе перемещения подвижного элемента на каждой дискрете стабилизации подвижного элемента -под вторыми, в направлении перемещения подвижного элемента, датчиками устанавливают величины зазора в равные величинам зазоров под первыми датчиками на предыдущей дискрете стабилизации и помещают подвижный элемент на текущей дискрете стабилизации в невозмущенное положение относительно неподвижной в пространстве плоскости параллельной плоскости установки оснований датчиков, получают исходные величины зазоров, по которым осуществляют корректировку положения подвижного элемента на каждой дискрете стабилизации в процессе его рабочего перемещения. Решение задачи достигается также тем, что устройство стабилизации положения подвижного элемента аэростатической направляющей, содержащее подвижный и неподвижный элементы, образующие замкнутую аэростатическую направляющую, регуляторы давления в газовом слое и толкатели прямого и обратного хода, согласно изобретению, снабжено жиклерами подачи газе в зазоры замкнутой аэростатической опоры, размещенными в подвижном элементе, на поверхности которого установлены по крайней мере три блока датчиков величин зазора, в каждом упомянутом блоке размещены первый и второй датчики величин зазоров между основаниями этих датчиков и поверхностью неподвижного элемента, на этой же поверхности установлены не менее трех отдельных регуляторов давления или параллельно подключенных гр упп регуляторов давления по числу блоков датчиков величин зазоров, причем каждый регулятор давления электрически связан с соответствующим блоком датчиков величин зазоров через введенный в устройство блок стабилизации положения подвижного элемента, включающий цифровой блок, операционные усилители, переключатели, дифференциальные усилители, устройство управления толкателями, причем первые и вторые датчики величин зазоров каждого блока датчиков величин зазоров соединены с входами измерителей величин зазоров, выходы измерителей величин зазоров соединены с входами цифрового блока, выходы измерителей величин зазоров по сигналам первых датчиков величин зазоров через переключатель "работа выключено" соединены с входами дифференциальных усилителей, входы толкателя прямого хода соединены с выходами устройства управления толкателями, а его выход соединен с входом устройства управления толкателями, входа толкателя обратного хода соединены с выходами устройства управления толкателями, а его выход соединен со входом устройства управления толкателями, выходы устройства управления толкателями соединены со входами цифрового блока, входы операционных усилителей соединены с выходами цифрового блока, выходы операционных усилителей через переключатель "больше - выключено - меньше" соединены с входами соответствующи х дифференциальных усилителей, вторые входы дифференциальных усилителей через переключатель "работа - выключено" соединены с входами цифрового блока, выходы дифференциальных усилителей соединены с регуляторами давления. Причинно-следственная связь между совокупностью существенных признаков заявляемого изобретения и достигаемыми техническими результатами состоит в следующем. Пусть на подвижном элементе аэростатической направляющей (фиг.3) размещены, например, три блока датчиков величин зазоров. В каждом блоке датчиков величин зазоров устанавливают первый и второй (по направлению перемещения подвижного элемента) датчики величин зазоров, например, емкостного типа. Следовательно, измеряют величины зазоров между основаниями этих датчиков и поверхностью неподвижного элемента аэростатической направляющей. Причем, датчики величин зазоров о блоках датчиков устанавливают с одинаковыми расстояниями между центрами оснований этих датчиков. Введем систему координат (фиг.3), жестко связанную с неподвижным элементом, причем, плоскость совмещена, например, с плоскостью основания этого неподвижного элемента, а ось направлена по направлению перемещения подвижного элемента. Пусть также о исходном для перемещения положении подвижного элемента основания датчиков величин зазоров в блоках датчиков величин зазоров установлены так, что их основания лежат в одной плоскости, параллельной плоскости а блоки датчиков величин зазоров устанавливают так, чтобы прямые, проведенные через центры оснований первого и второго датчиков величин зазоров каждого блока датчиков, были параллельны оси системы координат В начальном положении подвижного элемента измеряют величины зазоров под первыми датчиками (фиг.5) каждого блока датчиков и запоминают их в качестве величин опорных зазоров. Смещают подвижный элемент на величину дискреты стабилизации, равной расстоянию между центрами оснований датчиков в блоке датчиков, и устанавливают под вторыми датчиками каждого блока датчиков величин зазоров, равные величинам зазоров, которые были под первыми датчиками этих блоков датчиков до перемещения подвижного элемента (т.е. величины опорных зазоров). Поэтому независимо от рельефа (кривизны) поверхности неподвижного элемента расстояния от любых трех точек основания подвижного элемента до плоскости (а также до любой неподвижной (базовой) плоскости (фиг.5), параллельной плоскости будут такими же, как и до начала перемещения. Не изменяя положения подвижного элемента измеряют величины зазоров под первыми датчиками, запоминают их в качестве опорных, перемещают подвижный элемент на величину дискреты стабилизации и, устанавливая под вторыми датчиками величины зазоров, равные соответствующим опорным зазорам, устанавливают подвижный элемент (после перемещения на вторую дискрету стабилизации) относительно базовой плоскости в такое положение, которое он занимает относительно этой плоскости в исходном положении. После перемещения подвижного элемента из исходного положения на заданное расстояние с шагом равным дискрете стабилизации и выполнения на каждой дискрете приведенных выше действий получают значения величин опорных зазоров (под первыми датчиками каждого блока датчиков) для каждой дискреты стабилизации, которые соответствуют неизменному положению подвижного элемента относительно базовой плоскости. Для стабилизации положения подвижного элемента относительно базовой плоскости при его перемещении сравнивают текущие значения величин зазоров под первым датчиками величин зазоров с величинами опорных зазоров для дискреты стабилизации, соответствующей положению подвижного элемента относительно исходного положения. При отклонении текущих значений величин зазоров под первыми датчиками от соответствующи х опорных зазоров под воздействием нагрузки или из-за погрешностей изготовления аэростатической направляющей, устраняют это отклонение и стабилизируют положение подвижного элемента относительно базовой плоскости. Погрешность стабилизации положения подвижного элемента определяется погрешностью измерения величин зазоров, неплоскостностью поверхности неподвижного элемента, а также величиною дискреты стабилизации и может не превышать 0,05мкм. На фиг.1 изображена аэростатическая направляющая по прототипу: на фиг.2 иллюстрация положения подвижного элемента относительно неподвижного по прототипу при изменении угла наклона поверхности неподвижного элемента; на фиг.3 - вариант размещения блоков датчиков и регуляторов давления на подвижном элементе аэростатической направляющей; на фиг.4 - блок датчиков величин зазоров; на фиг.5 - иллюстрация осуществления способа стабилизации положения подвижного элемента аэростатической направляющей; на фиг.6 - регулятор давления (осевое сечение); на фиг.7 - иллюстрация метода опорных зазоров (на примере одного блока датчиков величин зазоров); на фиг.8 аэростатическая направляющая (общий вид заявляемого устройства); на фиг.9 функциональная электрическая схема заявляемого устройства; на фиг.10 - подвижный элемент аэростатической направляющей; на фиг.11 - то же, но в сечении по Б - Б на фиг.10; на фиг.12 - то же, но в сечении по В - В на фиг.10; на фиг.13 - то же, но в сечении по Г - Г на фиг.10; на фиг.14 - то же, но в сечении по А - А на фиг.10; на фиг.15 - блок-схема модуля связи ПЭВМ с функциональными элементами (ввод информации измерителей величин зазоров); на фиг.16 - блоксхема модуля связи ПЭВМ с функциональными элементами (преобразование и выдача цифровой информации). Устройство стабилизации положения подвижного элемента 1 аэростатической направляющей 2 при его перемещении над поверхностью 3 неподвижного элемента 4 (фиг.8) включает толкатель 5 прямого хода подвижного элемента 1, толкатель 6 обратного хода подвижного элемента 1, устройство 7 управления толкателями 5 - 6 (например, аналогичное устройство по а.с. СССР №1676417 "Пьезоэлектрический двигатель") и блок 8 стабилизации положения подвижного элемента (фиг.9). Пьезоэлектрический двигатель по а.с. СССР №1676417 шаговый с регулир уемой величиной шага и с встроенным измерителем микроперемещений. Величина шага перемещения подвижного элемента 1 вычисляется как разность величины зазора между датчиком измерителя микроперемещений и подвижным элементом 1, измеренного до начала перемещения и после окончания перемещения подвижного элемента 1 на шаге перемещения Устройство 7 управления толкателями 5 и 6 обеспечивает установку величины шага перемещения подвижного элемента 1 и его перемещение с установленным шагом перемещения в прямом или обратном направлениях. Для этого в устройстве 7 управления толкателями 5 - 6 вырабатывается серия управляющих сигналов, в число которых входят сигналы начала и конца шага перемещения подвижного элемента 1. Подвижный элемент 1 аэростатической направляющей 2 (фиг.10) имеет, например, верхнюю стенку 9, нижнюю стенку 10 и боковые стенки 11. На поверхности подвижного элемента 1, например, на верхней стенке 9, подвижного элемента 1 устанавливают (фиг.10) блок 12, блок 13, блок 14 датчиков величин зазоров. В каждом блоке 12, 13, 14 датчиков величин зазоров с возможностью смещения по высоте зазора установлены первый (по направлению перемещения подвижного элемента 1 из исходного положения (фиг.3) датчик 15 величины зазора и второй датчик 16 величины зазора (фиг.10). Причем, расстояние между центрами оснований датчиков 15 и 16 в каждом блоки 12, 13, 14 датчиков одинаковы и равны дискрете стабилизации (фиг.4). Жиклеры 17 подачи газа выполнены в подвижном элементе 1, например, в каждой стенке 9, 10, 11 подвижного элемента 1 под крышкой 18 (фиг.10) выполняют жиклеры 17 подачи газа в зазоры между стенками 9, 10, 11 и соответствующими гранями неподвижного элемента 4 (фиг.11, 12, 13, 14). Следовательно, стенки 9, 10, 11 подвижного элемента 1 образуют с гранями неподвижного элемента 4 замкнутую аэростатическую направляющую, что обеспечивает силовое замыкание подвижного элемента 1. Кроме того, на крышке 18 (фиг.10) верхней стенки 9 подвижного элемента 1 симметрично относительно блоков 12, 13, 14 датчиков величин зазоров 15, 16 установлены, по числу блоков датчиков величин зазоров, регуляторы 19, 20, 21 давления в газовом слое плоской аэростатической опоры, образованной верхней стенкой 9 подвижного элемента 1 и поверхностью 3 неподвижного элемента 4. Каждый регулятор 19, 20, 21 давления в газовом слое (фиг.6, 9) спроектированный, например, по а.с. СССР №1500805 "Аэростатическая шпиндельная опора") включает корпус 22, в торец которого ввинчен винт 23. В основании винта 23 укреплен пьезостолб 24. Причем, пьезостолб 24 изолирован от винта 23 изоляторами 25. На противоположном торце пьезостолба 24 укреплена игла 26, которая предназначена для изменения площади поперечного сечения подводящего канала 27, а, следовательно, и давления газа на выходе этого подводящего канала 27. Начальную величину площади поперечного сечения подводящего канала 27 устанавливают путем смещения пьезостолба 24 вращением винта 23. Причем каждый регулятор 19, 20, 21 давления в газовом слое через блок 8 стабилизации положения подвижного элемента 1 электрически связан с соответствующим блоком 12, 13, 14 датчиков величин зазоров. Сигналы датчиков 15, 16 каждого блока 12, 13, 14 датчиков измерителями 28 величин зазоров (см.: Гриневич Б.Ф. и др. Измерительные компенсационно-мостовые устройства с емкостными датчиками. - К.: Наук. думка, 1987) преобразуются в напряжения, пропорциональные величинам зазоров под этими датчиками величин зазоров 15, 16 (фиг.9), которые поступают в ци фровой блок 29. Цифровой блок 29 предназначен для: - приема и преобразования в цифровой код измерительной информации от измерителей 28 величин зазоров, а также ее отображения на экране дисплея; - формирования массива опорных зазоров, а также их выдачи в схему управления положением подвижного элемента 1 в процессе стабилизации; вычисления на каждом шаге микроперемещения подвижного элемента 1 величины его результирующего перемещения относительно исходного положения. В качестве цифрового блока 29 может использоваться ПЭВМ оснащенная модулем ввода-вывода данных для связи с периферийными функциональными элементами. Примером служит ЭВМ типа 9825 фирмы "Хьюлетт-Паккард" (см.: Науман Г. и др. Стандартные интерфейсы для измерительной техники. - М.: Мир, 1982. - С.269). Назначение, состав и работа модуля вводавывода данных описаны там же, с.272 290. Функциональная схема модуля для ввода информации с функционального элемента представлена на фиг.15. Функциональная схема модуля для вывода информации на внешний регистр приведена на фиг.16. Операционные усилители 30 обеспечивают формирование на каждый из регуляторов 19, 20, 21 давления равных по величине в противоположных по знаку сигналов, задаваемых кодами упоминавшихся сигналов управления на регуляторы 19, 20, 21 давления. Переключатели 31 "больше - выключено меньше" служат для изменения полярности сигналов на входах дифференциальных усилителей 32, поступающих с операционных усилителей 30. В среднем положении переключатель 31 отключает операционные усилители 30 от дифференциальных усилителей 32. В положении переключателя 31 "больше" полярность сигналов на входах дифференциальных усилителей 32 такая, что пьезостолбы 24 регуляторов 19, 20, 21 укорачиваются, а давление на выходах регуляторов 19, 20, 21 повышается. В положении "меньше" полярность сигналов на входах дифференциальных усилителей изменяется на обратную и вызывает удлинение пьезостолбов 24 регуляторов 19, 20, 21 давления. Следовательно, давление на выходах эти х регуляторов 19, 20, 21 давления понижается. Дифференциальные усилители 32 обеспечивают удлинение или укорочение пьезостолбов 24 регуляторов 19, 20, 21 давления в зависимости от знака и величины разности потенциалов на их входа х, которая определяется направлением и величиной отклонения подвижного элемента 1 относительно невозмущенного положения. Переключатель 33 "работа - выключено" (фиг.9) в положении "работа" обеспечивает подключение напряжений опорных зазоров с выходов цифрового блока 29 и выходов измерителей 28 величин зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков величин зазоров ко входам дифференциальных усилителей 32, 34 - ограничитель перемещения подвижного элемента 1. Устройство 7 управления толкателями, измерители 28 величин зазоров, цифровой блок 29, операционные усилители 30, переключатели 31, дифференциальные усилители 32 образуют блок 8 стабилизации подвижного элемента 1. При необходимости повышения точности стабилизации положения подвижного элемента 1 устройство может содержать четыре и более блоков датчиков величин зазоров, а для расширения диапазона воспринимаемых подвижным элементом 1 нагрузок вместо одного регулятора давления устанавливают группу параллельно подключенных регуляторов давления. Причем первые и вторые датчики величин зазоров блоков 12, 13, 14 датчиков величин зазоров соединены с входами измерителей 28 величин зазоров, выходы измерителей 28 величин зазоров соединены с входами цифрового блока 29, выходы измерителей 28 величин зазоров по сигналам первых датчиков 15 величин зазоров блоков 12,13, 14 датчиков величин зазоров 15, 16 дополнительно через переключатель 33 "работа выключено", а положение "работа" соединены с первыми входами дифференциальных усилителей 32, входы толкателя 5 прямого хода соединены с входами устройства 7 управления толкателями, а его выход соединен с входом устройства 7 управления толкателями, входы толкателя 6 обратного хода соединены с выходами устройства 7 управления толкателями, а его выход соединен с входом устройства 7 управления толкателями, выходы устройства 7 управления толкателями соединены с входами цифрового блока 29, а его вход соединен с выходом цифрового блока 29, входы операционных усилителей 30 соединены с выходами цифрового блока 29, выходы операционных усилителей 30 через переключатели 31 "больше - выключено - меньше" соединены с входами соответствующи х дифференциальных усилителей 32, вторые входы дифференциальных усилителей 32 через переключатель 33 "работа выключено" в положении работа соединены с выходами цифрового блока 29, выходы дифференциальных усилителей 32 соединены с пьезостолбами 24 регуляторов 19, 20, 21 давления в газовом слое аэростатической направляющей. Заявляемый способ состоит в следующем. 1. В подвижном элементе 1 аэростатической направляющей 2 устанавливают три блока 12, 13, 14 датчиков величин зазоров, центры оснований датчиков 15, 16 каждого блока 12, 13, 14 датчиков размещают по прямым, параллельным направлению перемещения подвижного элемента 1 (фиг.5), основания датчиков 15, 16 блоков 12, 13, 14 датчиков устанавливают в одной плоскости, причем, расстояния между центрами оснований датчиков 15 и 16 в каждом блоке 12, 13, 14 датчиков равны между собой и равны дискрете стабилизации положения подвижного элемента 1 аэростатической направляющей. Установка центров оснований датчиков по прямым, параллельных направлению перемещения подвижного элемента 1, и установка равных расстояний между центрами оснований датчиков 15 и 16 в блоках 12, 13, 14 обеспечивается технологией изготовления аэростатической направляющей 2. Установку оснований датчиков 15, 16 блоков 12, 13, 14, датчиков в одной плоскости выполняют с помощью интерферометра. Интерферометры для контроля плоскостей позволяют установить основания датчиков в одной плоскости с погрешностью (Коломийцов Ю.В. Интерферометры. - Л.: Машиностроение, 1976. С.8). Использование метода "пробного стекла" (там же, с.196) позволяет уменьшить ошибку установки датчиков до 0,006мкм. Установка оснований датчиков 15 и 16 блоков 12, 13 и 14 датчиков в одной плоскости может быть выполнена также по эталонной плоскости. Для этого основание подвижного элемента 1 накладывают на эталонную плоскость и, смещая датчики по высоте зазора, устанавливают их по показаниям измерителя величины зазора с одинаковыми зазорами относительно эталонной плоскости. Основания датчиков 15 и 16 величин зазоров каждого блока 12, 13, 14 датчиков могут быть установлены в параллельных между собой плоскостях. В этом случае работоспособность способа не нарушается. 2. Подвижный элемент 1 аэростатической направляющей 2 смещают над неподвижным элементом 4 в начальное для перемещения положение и задают подвижному элементу 1 невозмущенное положение, для чего подают сигналы управления на регуляторы 19, 20, 21 давления в газовом слое аэростатической направляющей 2, изменяют положение подвижного элемента 1 относительно неподвижного элемента 4 и устанавливают равные величины зазоров под первыми датчиками 15 каждого блока 12, 13, 14 датчиков, запоминают величины зазоров под первыми датчиками 15 в качестве величин опорных зазоров Для выполнения этих действий подвижный элемент 1 смещают, например, в одной из крайних положений, которое является начальным для его перемещения над подвижным элементом 4 на заданное расстояние. Измеряют величины зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков. Если зазоры под первыми датчиками 15 не равны между собой, подают сигналы управления на регуляторы 19, 20, 21 давления в газовом слое, изменяют главный вектор сил давления и изменяют положение подвижного элемента 1 относительно неподвижного 4. Изменяя сигналы управления на регуляторы 19, 20, 21 давления методом последовательных приближений устанавливают равные величины зазоров под первыми датчиками 15 каждого блока 12, 13, 14 датчиков. Положение, которое подвижный элемент 1 займет относительно неподвижной плоскости, параллельной плоскости установки датчиков 15 и 16 блоков 12, 13, 14 датчиков при равных между собой величинах зазоров под первыми датчиками 15, принимают в качестве его невозмущенного положения относительно упомянутой неподвижной плоскости, а саму эту плоскостью считают базовой относительно которой стабилизируется положение подвижного элемента 1. Запоминают величины зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков в качестве опорных зазоров для установки подвижного элемента 1 в невозмущенное положение после его перемещения из начального положения на величину дискреты стабилизации 3. Из исходного положения подвижный элемент 1 устанавливают на расстоянии и на каждом расстоянии подвижного элемента 1 относительно исходного (начального) положения под вторыми датчиками 16 каждого блока 12, 13, 14 датчиков устанавливают величины зазоров, равные величинам опорных зазоров, измеренных на расстоянии подвижного элемента 1 относительно начального положения под первыми датчиками 15 каждого блока 12, 13, 14 датчиков после установки подвижного элемента 1 в невозмущенное положение относительно базовой плоскости, и устанавливают подвижный элемент 1 в невозмущенное положение относительно базовой плоскости. Не изменяя положения подвижного элемента 1, измеряют величины зазоров под первыми датчиками 15 величин зазоров и запоминают их в качестве величины опорных зазоров для установки подвижного элемента 1 в невозмущенное положение относительно базовой плоскости на расстоянии относительно его начального положения. Для выполнения этих действий подвижный элемент 1 из исходного положения перемещают на величину дискреты стабилизации Измеряют величины зазоров под вторыми датчиками 16 блоков 12, 13, 14 датчиков и сравнивают их с величинами соответствующи х опорных зазоров. Если хотя бы одно из равенств не выполняется, подают сигналы управления на регуляторы 19, 20, 21 давления в газовом слое аэростатической направляющей 2 и изменяют положение точек основания подвижного элемента 1 относительно поверхности 3 неподвижного элемента 4 по высоте зазора. Методом последовательных приближений добиваются выполнения приведенных выше равенств и. в силу рассмотренных ранее причинно-следственных связей, устанавливают подвижный элемент 1 в невозмущенное положение относительно базовой плоскости Измеряют величины зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков и запоминают их в качестве величин опорных зазоров для установки подвижного элемента 1 в невозмущенное положение после второго перемещения этого подвижного элемента 1 на величину дискреты стабилизации Выполняют второе перемещение подвижного элемента 1 на величину и останавливают его на расстоянии относительно начального положения. Устанавливают под вторыми датчиками 16 блоков 12, 13, 14 датчиков, как и на расстоянии относительно начального положения, величины зазоров, равные соответствующим опорным зазорам и устанавливают подвижный элемент 1 на данном расстоянии в невозмущенное положение относительно базовой плоскости. После установки подвижного элемента 1 в невозмущенное положение измеряют величины зазоров под первыми датчиками 15 и запоминают их в качестве опорных зазоров для установки подвижного элемента 1 в невозмущенном положении после третьего перемещения на расстоянии Приведенные выше действия выполняют до перемещения подвижного элемента 1 относительно начального положения на расстоянии где - заданная величина перемещения подвижного элемента 1 аэростатической направляющей 2. Результаты выполнения приведенных выше действий при перемещении подвижного элемента 1 аэростатической направляющей 2 из начального положения на расстояние следующую таблицу: составляют По номеру дискреты стабилизации выбирают величины первом в случае или величины опорных зазоров во втором случае. Для удержания на дискрете стабилизации под первыми датчиками 15 блоков 12, 13, 14 датчиков величин зазоров, равных соответствующим опорным зазорам, применяют систему автоматического регулирования по отклонению. При отклонении величины зазора под первым датчиком 15 блока датчиков от величины своего опорного зазора вырабатывается сигнал рассогласования на Выполнением п.3 способа заканчивается выполнение подготовительных операций, обеспечивающих стабилизацию положения подвижного элемента 1 аэростатической направляющей 2. 4. В процессе перемещения подвижного элемента 1 аэростатической направляющей 2 измеряют текущее значение величины перемещения подвижного элемента 1 относительно исходного положения и, если подвижный элемент 1 перемещают из исходного положения и выполняется неравенство стабилизации), номер сравнивают текущие дискреты значения величин зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков с соответствующими величинами опорных зазоров, измеренных на дискрете стабилизации, если подвижный элемент 1 перемещают по направлению к исходному положению и выполняется неравенство сравнивают текущие значения величин зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков с соответствующими величинами опорных зазоров, измеренных на дискрете стабилизации. При отклонении текущих значений величин зазоров под первыми датчиками 15 блоков 12, 13, 14 от упомянутых величин опорных зазоров изменяют положение подвижного элемента 1 над поверхностью 3 неподвижного элемента 4 аэростатической направляющей 2 и устанавливают под первыми датчиками 15 блоков 12, 13, 14 датчиков величины зазоров, равные величинам опорных зазоров. Для выполнения названных выше действий измеряют расстояние подвижного элемента 1 от исходного положения. Номер дискреты стабилизации при перемещении подвижного элемента 1 по направлению от исходного положения определяют из нестрогого неравенства положению при перемещении к исходному из нестрогого неравенства регулятор давления установленный рядом с блоком датчиков. Под воздействием этого сигнала давление на выходе регулятора давления изменяется так, что отклонение величины зазора под первым датчиком 15 блока датчиков от своего опорного зазора для дискреты стабилизации стремится к нулю. Поэтому отклонение подвижного елемента 1 от невозмущенного положений не превышает разности величин двух смежных опорных зазоров (фиг.7) и определяется величиной дискреты стабилизации и кривизной поверхности 3 неподвижного элемента 4, и при уменьшении дискреты стабилизации становится незначительным. Работает устройство стабилизации положения подвижного элемента 1 аэростатической направляющей 2 следующим образом. 1. Предварительно основания первых и вторых датчиков 15 и 16 блоков 12, 13, 14 датчиков величин зазоров устанавливают в одной плоскости, например, с помощью эталонной плоскости. Для этого основание стенки 9 подвижного элемента 1 накладывают на эталонную плоскость. С пульта цифрового блока 29 выполняют пуск подпрограммы "Измерение зазоров". В соответствии с алгоритмом этой подпрограммы цифровой блок 29 с установленной частотой последовательно опрашивает измерители 28 величин зазоров и преобразует выходные напряжения измерителей 28 в цифровые двоичные коды, запоминает цифровые двоичные коды величин зазоров под первыми и вторыми датчиками 15 и 16 блоков 12, 13, 14 датчиков величин зазоров в памяти, а также преобразует и х в десятичные коды и отображает их на экране дисплея. Смещают первые и вторые датчики 15 и 16 блоков 12, 13, 14 датчиков по высоте зазора и, наблюдая численные значения величин этих зазоров на экране дисплея, устанавливают под всеми датчиками 15 и 16 блоков 12, 13, 14 одинаковые величины зазоров, например, 10мкм. В результате основания датчиков 15 и 16 блоков 12, 13, 14 датчиков будут установлены в одной плоскости. 2. Задают подвижному элементу 1 нневозмущенное положение относительно базовой плоскости. Для задания подвижному элементу 1 положения, принимаемого в качестве его невозмущенного положения, подвижный элемент 1 смещают по направляющей 4 в исходное (начальное) положение. Для этого, например, подвижный элемент 1 смещают влево до упора 34 (фиг.8) и выполняют с пульта цифрового блока 29 пуск подпрограммы "Измерение зазоров". Алгоритм работы этой подпрограммы описан в п.1. В результате на экране дисплея наблюдают численные значения величин зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков. Если зазоры под первыми датчиками 15 блоков 12, 13, 14 датчиков равны, с пульта цифрового блока 29 выполняют пуск подпрограммы "Запись опорных зазоров". В соответствии с алгоритмом работы этой подпрограммы код величины зазора под первым датчиком 15 блока 12 датчиков перемещается в памяти цифрового блока 29 в первую ячейку памяти, отведенную для хранения массива опорных зазоров, код величины зазора под первым датчиком 15 блока 13 датчиков перемещается в памяти цифрового блока 29 во вторую ячейку массива опорных зазоров, код величины зазора под датчиком 15 блока 14 датчиков перемещается а памяти цифрового блока 29 в третью ячейку массива опорных зазоров. Если зазоры под первыми датчиками 15 блоков 12, 13, 14 датчиков не равны, на пульте цифрового блока 29 набирают коды сигналов управления и адреса дифференциальных усилителей 32. Код адреса четырехразрядный (фиг.17). Адрес дифференциального усилителя 32 электрически связанного с регулятором 19 давления - 0001 (подключен к первой шине коммутатора каналов на фиг, 17), адрес дифференциального усилителя 32 связанного с регулятором 20 давления - 0010, а дифференциального усилителя 22 связанного с регулятором 21 давления - 0011). С пульта цифрового блока 29 выполняют пуск подпрограммы "Сигналы управления". В соответствии с алгоритмом работы этой подпрограммы коды сигналов управления (фиг.17) преобразуются в напряжения и поступают на дифференциальные усилители 32 через операционные усилители 30 и переключатели 31 "больше - выключено - меньше" в соответствии с установленными адресами. С выходов дифференциальных усилителей 32 напряжения, определяемые кодами сигналов управления, поступают на пьезостолбы 24 соответствующи х регуляторов 19, 20, 21 давления. В положении переключателя 31 "больше" давление под связанным с ним регулятором давления увеличивается, а в положении "меньше" уменьшается, Следовательно, увеличиваются или уменьшаются зазоры под датчиками 15 и 16 блока датчиков, установленного рядом с данным регулятором давления. Выполняют пуск подпрограммы "Измерение зазоров" и по экрану дисплея проверяют равенство зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков. Если эти зазоры не равны, методом последовательных приближений, изменяя сигналы управления на регуляторы 19, 20, 21 давления, добиваются равенства зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков и выполняют пуск подпрограммы "Запись опорных зазоров". В результате будут заполнены первые три ячейки массива опорных зазоров, как показано выше. 3. Подвижный элемент 1 из исходного положения перемещают на величину дискреты стабилизации Для перемещения подвижного элемента 1 из .исходного положения на величину дискреты стабилизации в устройстве 7 управления толкателями устанавливают величину шага у микроперемещения подвижного элемента 1 толкателем 5 прямого хода. В цифровой блок 29 вводят значение шага у микроперемещения подвижного элемента 1, величину дискреты стабилизации выполняют пуск подпрограммы "Перемещение подвижного элемента", а устройство 7 управления толкателями переводят в режим непрерывного перемещения подвижного элемента 1 с установленным шагом перемещения Подвижный элемент 1 начинает перемещаться из исходного положения. На каждом шаге микроперемещения подвижного элемента 1 толкателем 5 прямого хода из устройства 7 управления толкателями в цифровой блок 29 поступают; сигнал начала микроперемещения подвижного элемента 1; сигнал конца шага микроперемещения подвижного элемента 1; напряжение с измерителя величины микроперемещения подвижного элемента 1, устройства 7 управления толкателями. В соответствии с алгоритмом работы подпрограммы "Перемещение подвижного элемента" цифровой блок 29 на каждом шаге микроперемещения по сигналу преобразует вы ходной сигнал измерителя микроперемещений (фиг.16) в двоичный код начального значения сигнала измерителя микроперемещений. По сигналу вы ходной сигнал измерителя микроперемещений преобразуется в двоичный код конечною значения сигнала измерителя и вычисляется величина шага микроперемещения Вычисляется результирующая величина перемещения подвижного элемента 1 за шагов микропемещений: и вычисляется разность между заданной величиной перемещения и текущим значением величины перемещения подвижного элемента 1 Проверяется выполнение неравенства: Если это неравенство не выполняется, подпрограмма осуществляет очередное микроперемещение подвижного элемента 1 на шаг Если неравенство выполняется, цифровой блок 29 выдает в устройство 7 управления толкателями сигнал останова. Перемещение подвижного элемента 1 прекращается, а значение величины отображается на экране дисплея. В устройстве 7 управления толкателями устанавливают величину очередного шага микроперемещения и в режиме шагового перемещения подвижный элемент 1 перемещают на величину В результате подвижный элемент 1 будет перемещен из исходного положения на величину дискреты стабилизации 4. На расстоянии подвижного элемента 1 относительно его исходного положения под вторыми датчиками 16 блоков 12, 13, 14 датчиков устанавливают величины зазоров равные величинам опорных зазоров и устанавливают подвижный элемент 1 в невозмущенное положение относительно базовой плоскости. Не изменяя положения подвижного элемента 1 измеряют величины под первыми датчиками 15 блоков 12, 13, 14 датчиков и запоминают их в качестве опорных зазоров для установки подвижного элемента 1 в невозмущенное положение на расстоянии 2 относительно исходного положения. Для выполнения этих действий п. 2 выполняют с той разницей, что вместо установки равных зазоров под первыми датчиками 15 блока 12, 13, 14 датчиков устанавливают зазоры под вторыми датчиками 16 блоков 12, 13, 14 датчиков равные величинам опорных зазоров соответственно. 5. П.3 и п.4 последовательно выполняют на расстояниях подвижного элемента 1 от его исходного положения до перемещения подвижного элемента 1 на расстоянии и в результате получают массив опорных зазоров, совпадающий по содержанию с содержанием приведенной в описаним способа таблицей. 6. Стабилизация положения подвижного элемента 1 аэростатической направляющей 2 относительно базовой плоскости. Устройство стабилизации положения подвижного элемента 1 в процессе его перемещения над неподвижным элементом 4 работает следующим образом. Подвижный элемент 1 устанавливают в исходное положение (смещают до упора 36 фиг.8). Переключатели 31 "больше - выключено меньше" блока 8 стабилизации устанавливают в положении "выключено" и отключают выходы операционных усилителей 30от входов операционных усилителей 32 (фиг.9). Переключатель 33 "работа - выключено" устанавливают в положение "работа" и подключают измерители 28 величин зазоров под первыми датчиками 15 блоков 12, 13, 14 датчиков величин зазоров ко вторым входам дифференциальных усилителей 32, а выходы напряжений опорных зазоров цифрового блока 29 подключают к первым входам дифференциальных усилителей 32. В устройстве 7 управления толкателями устанавливают величину шага микроперемещения подвижного элемента 1. С пульта в цифровой блок 29 вводят величину шага микроперемещения, величину перемещения подвижного элемента 1 над неподвижным элементом 4 и выполняют пуск подпрограммы "Стабилизация". В соответствии с алгоритмом работы этой подпрограммы код величины опорного зазора считывается с массива опорных зазоров, преобразуется в напряжение опорного, зазора и через переключатель 33 поступает на второй вход соответствующего дифференциального усилителя 32, код величины опорного зазора преобразуется в напряжение опорного зазора и через переключатель 33 поступает на второй вход соответствующего усилителя 32, код величины опорного зазора преобразуется в напряжение зазора через переключатель 33 также поступает на второй вход своего дифференциального усилителя 32. На первый вход дифференциального усилителя 32 регулятора 19 давления поступает напряжение с выхода измерителя 28 величины зазоров по сигналу первого датчика 15 блока 12 датчиков, рядом с которым расположен регулятор 19 давления. На первый вход дифференциального усилителя 32 регулятора 20 давления поступает напряжение с выхода измерителя 28 величины зазора по сигналу датчика 15 блока 13 датчиков, рядом с которым расположен регулятор 20 давления. На первый вход дифференциального усилителя 32 регулятора 21 давления поступает напряжение с выхода измерителя 28 величины зазора по сигналу первого датчика 15 блока 14 датчиков, рядом с которым расположен регулятор 21 давления. Если зазоры под первыми датчиками 15 блоков 12, 13, 14 не равны соответствующим величинам опорных зазоров, на выходах дифференциальных усилителей 32 возникают разности потенциалов, пропорциональные величинам отклонений зазоров под первыми датчиками 15 блоков 12, 13,14 датчиков от соответствующи х опорных зазоров, В зависимости от знака разностей потенциалов на выходах дифференциальных усилителей 32, которые прикладываются к пьезостолбам 24 регуляторов 19, 20, 21 давления, пьезостолбы 24 будут удлиняться или укорачиваться. Давление на выходах подводящи х каналов 27 (фиг.6), а, следовательно, и положение подвижного элемента 1, будет изменяться так, что разность между величинами зазоров под первыми датчиками 15 и соответствующими опорными зазорами будет стремиться к нулю. Подвижный элемент 1 займет относительно базовой плоскости невозмущенное положение. Устройство 7 управления толкателями переводят в режим непрерывного перемещения подвижного с установленным шагом микроперемещения Подвижный элемент 1 начинает перемещаться из исходного положения. Как и при выполнении подпрограммы "Перемещение подвижного элемента 1 с шагом толкателем 5 прямого хода из устройства 7 управления толкателями в цифровой блок 29 поступают: сигнал начала шага микроперемещения подвижного элемента 1; сигнал конца шага микроперемещения подвижного элемента 1; напряжение измерителя микроперемещения подвижного элемента 1 устройства 7 управления толкателями. В соответствии с алгоритмом работы подпрограммы "Стабилизация" цифровой блок 29 на каждом шаге микроперемещения по сигналу выходной сигнал измерителя микроперемещений преобразует (фиг.16) в двоичный код начального значения измерителя микроперемещений элемента 1. сигнала подвижного По сигналу вы ходной сигнал измерителя микроперемещений преобразуется в двоичный код конечного значения сигнала измерителя микроперемещений подвижного элемента 1 и вычисляется величина шага микроперемещения. Вычисляется результирующая величина перемещения подвижного элемента 1 за шагов микроперемещений; и вычисляется разность между величиной дискреты стабилизации и текущим значением перемещения подвижного элемента 1 на дискрете стабилизации: Выполняется проверка: Если неравенство выполняется, цифровой блок 29 выдает в устройство 7 управления сигнал останова. Если подвижный элемент 1 перемещается на очередной шаг микроперемещения. Если на шаге микроперемещения значение увеличивается на единицу По значению в данном случае) из массива опорных зазоров считываются коды величин опорных зазоров преобразуются в напряжения опорных зазоров, которые из цифрового блока 29 поступают на вторые входы соотве тствующи х дифференциальных усилителей 32. В результате под первыми датчиками 15 блоков 12, 13, 14 датчиков на второй дискрете стабилизации (до перемещения подвижного элемента 1 на расстояние будут удерживаться величины зазоров, равные соответствующим опорными зазорам Стабилизация подвижного элемента 1 продолжается до его перемещения на величину При этом отклонение точек оснований первых датчиков 15, а следовательно, и точек основания подвижного элемента 1 от базовой плоскости на дискрете стабилизации не превышает максимальной из трех разностей (фиг.7): определяется величиной дискреты стабилизации, неплоскостностью поверхности 3 неподвижного элемента 4 и может не превышать 0,05мкм.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for stabilization of position of movable element of aerostatic guide
Автори англійськоюShepelev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюСпособ стабилизации положения подвижного элемента аэростатической направляющой и устройство для его осуществления
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: здійснення, рухомого, елемента, спосіб, аеростатичної, пристрій, стабілізації, положення, напрямної
Код посилання
<a href="https://ua.patents.su/12-14905-sposib-stabilizaci-polozhennya-rukhomogo-elementa-aerostatichno-napryamno-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення</a>
Спосіб фіксації проходження реверсивно-рухомого об’єкта та пристрій для його здійснення
Номер патенту: 7688
Опубліковано: 26.12.1995
Автори: Торубалко Тарас Григорович, Евєрт Олександр Володимирович, Барданов Валерій Олександрович
МПК: G01B 7/02
Мітки: об'єкта, проходження, реверсивно-рухомого, пристрій, фіксації, спосіб, здійснення
Формула / Реферат:
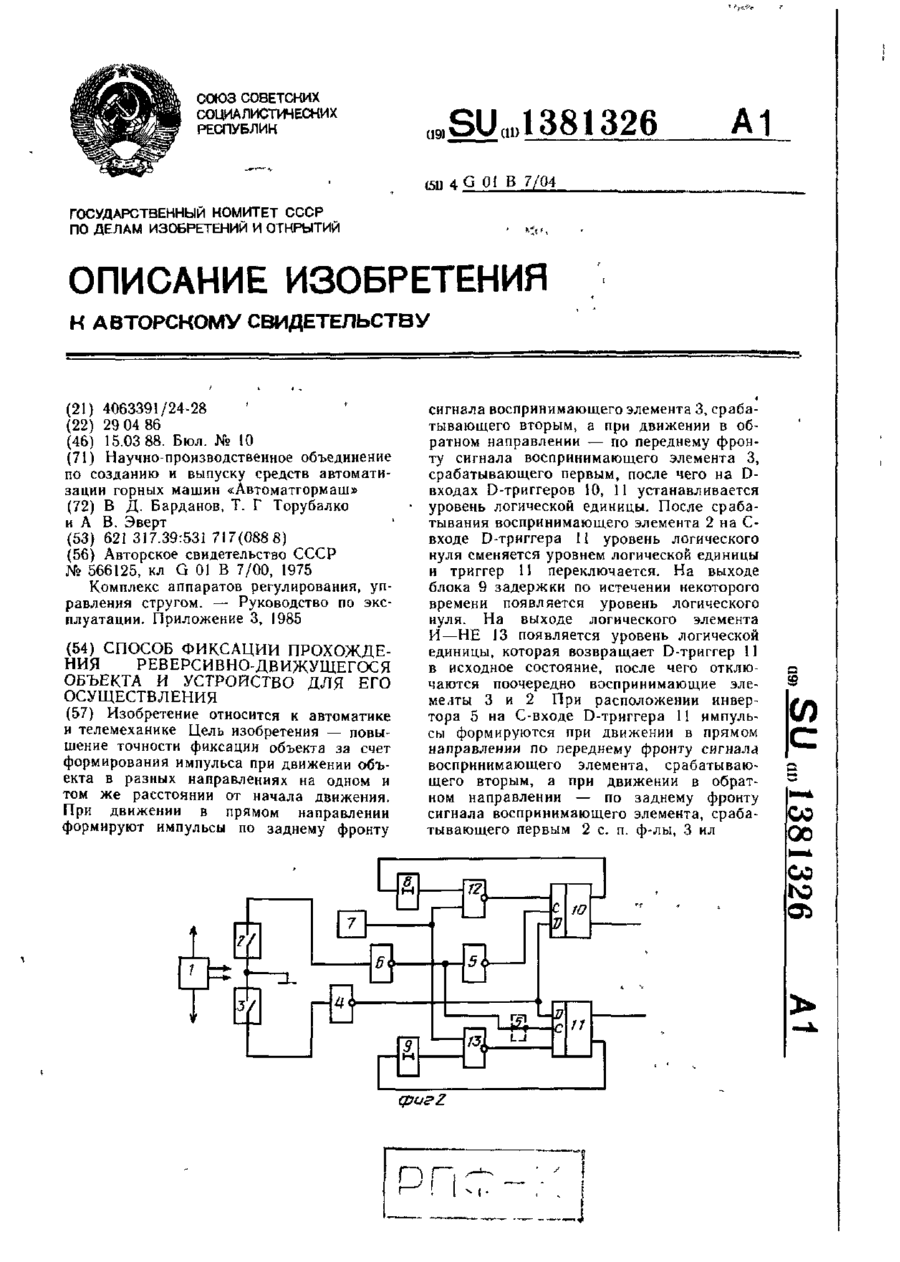
1. Способ фиксации прохождения реверсивно-движущегося объекта, заключающийся в том, что фиксируют прохождение объекта мимо чувствительного элемента в прямом и обратном направлениях, формируют импульсы по одному из фронтов сигнала чувствительного элемента при движении объекта в прямом направлении, отличающийся тем, что, с целью повышения точности фиксации объекта при движении в противоположном направлении, формируют импульсы по другому...
Магнітна опора для стабілізації положення вала
Номер патенту: 2264
Опубліковано: 26.12.1994
Автори: Альбрехт Веллер, Йохан Крістіан Фремерей
МПК: F16C 32/04
Мітки: стабілізації, вала, магнітна, положення, опора
Формула / Реферат:
1. Магнитная опора для стабилизации положения вала, содержащая вал и корпус, в котором расположены электрические катушки, а также соединенную с ними систему датчиков положения вала, регулятор и постоянные магниты, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик и упрощения конструкции, она снабжена по меньшей мере двумя смонтированными на валу вдоль его оси с зазором по отношению друг к другу упорными дисками, по...
Пристрій для формування команд керування по шляху переміщення рухомого об’єкта
Номер патенту: 1715
Опубліковано: 25.10.1994
Автор: Клименко Віталій Васильович
МПК: B66B 1/34
Мітки: переміщення, рухомого, пристрій, команд, формування, керування, об'єкта, шляху
Формула / Реферат:
1. Устройство формирования путевых команд управления подвижным объектом, содержащее датчик путевых импульсов, соединенный с реверсивным счетчиком, усилитель, узел программирования, отличающееся тем, что в него введены датчик конечного положения подвижного объекта и, соответственно количеству формируемых команд, блоки формирования путевых команд, каждый из которых содержит реверсивный счетчик, узел программирования и усилитель причем выходы...
Спосіб неінвазивного заміру артеріального тиску та пристрій для його здійснення
Номер патенту: 5716
Опубліковано: 28.12.1994
Автори: Павлов Сергій Володимирович, Колесник Петро Федорович, Кожем'яко Володимир Прокопович, Стрижевський Володимир Леонідович, Тимченко Леонід Іванович, Коротко Олександр Шимонович, Чепорнюк Сергій Володимирович
МПК: A61B 5/02
Мітки: артеріального, пристрій, здійснення, заміру, тиску, спосіб, неінвазивного
Формула / Реферат:
1. Способ неинвазивного измерения артериального давлення, основанный на измерении длительности пульсовой волны, по величине которой определяют среднее артериальное давление, отличающийся тем, что пульсовую волну регистрируют на лучевой артерии двумя оптоэлектрон-ными датчиками, измеряют координаты точек перегиба пульсовых волн, измеряют модуль разности значений указанных координат, по величине которого определяют систолическое...
Спосіб контролю віддалених датчиків та пристрій для його здійснення
Номер патенту: 9858
Опубліковано: 30.09.1996
Автори: Стаднік Микола Іванович, Стрекалова Леонора Олександрівна, Мезніков Артур Володимирович
МПК: G08C 19/16
Мітки: здійснення, датчиків, спосіб, пристрій, контролю, віддалених
Формула / Реферат:
(57) 1. Способ контроля удаленных датчиков, заключающийся в передаче по линии связи выпрямленного однополупериодного напряжения, из которого формируют импульсы, соответствующие состоянию датчиков, контроль импульсов осуществляют путем сравнения сформированных импульсов с эталонными и формируют по результатам сравнения команды управления, отличающийся тем, что при включенном состоянии датчиков формируют последовательность импульсов одной...
Попередній патент: Пристрій для лінійних переміщень
Наступний патент: Гірка настоянка “сумська горобинова”
Випадковий патент: Спосіб муфтового ремонту дефектної ділянки діючого трубопроводу з контролем якості монтажу