Багаторежимний термінал в системі радіозв’язку з багатоканальним входом, багатоканальним виходом та просторовим мультиплексуванням, спосіб і пристрій обробки даних та точка доступу в системі радіозв’язку
Номер патенту: 87973
Опубліковано: 10.09.2009
Автори: Уоллейс Марк С., Говард Стівен Дж., Кетчум Джон У., Уолтон Дж. Родні


Формула / Реферат
1. Термінал в системі радіозв'язку з багатоканальним входом, багатоканальним виходом (МІМО), який містить
блок вибору режиму, який діє для вибору режиму просторового мультиплексування з декількох режимів просторового мультиплексування, що підтримуються терміналом, причому кожний з декількох режимів просторового мультиплексування підтримує одночасну передачу багатьох потоків символів даних через багато просторових каналів МІМО-каналу, сформованих декількома антенами в терміналі,
процесор просторової обробки передачі, який діє для просторової обробки перших декількох потоків символів даних, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків символів передачі для передачі з декількох антен і через першу лінію зв'язку, і
процесор просторової обробки прийому, який діє для просторової обробки декількох потоків прийнятих символів, одержаних з декількох антен, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків відновлених символів даних, які є оцінками других декількох потоків символів даних, переданих через другу лінію зв'язку, при цьому МІМО-система є системою дуплексної передачі з частотним рознесенням каналів (FDD).
2. Спосіб обробки даних в системі радіозв'язку з багатоканальним входом, багатоканальним виходом (МІМО), який включає
вибір режиму просторового мультиплексування з декількох режимів просторового мультиплексування, причому кожний з декількох режимів просторового мультиплексування підтримує одночасну передачу багатьох потоків символів даних через багато просторових каналів МІМО-каналу,
просторову обробку перших декількох потоків символів даних, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків символів передачі для передачі з декількох антен і через першу лінію зв'язку, і
просторову обробку декількох потоків прийнятих символів, одержаних з декількох антен, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків відновлених символів даних, які є оцінками других декількох потоків символів даних, переданих через другу лінію зв'язку, при цьому МІМО-система є системою дуплексної передачі з частотним рознесенням каналів (FDD).
3. Пристрій обробки даних у системі радіозв'язку з багатоканальним входом, багатоканальним виходом (МІМО), який містить
засіб вибору режиму просторового мультиплексування з декількох режимів просторового мультиплексування, причому кожний з декількох режимів просторового мультиплексування підтримує одночасну передачу багатьох потоків символів даних через багато просторових каналів МІМО-каналу,
засіб просторової обробки перших декількох потоків символів даних, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків символів передачі,
засіб передачі декількох потоків символів передачі з декількох антен і через першу лінію зв'язку,
засіб прийому декількох потоків прийнятих символів з декількох антен для другої лінії зв'язку, і
засіб просторової обробки декількох потоків прийнятих символів, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків відновлених символів даних, які є оцінками других декількох потоків символів даних, переданих через другу лінію зв'язку, при цьому МІМО-система є системою дуплексної передачі з частотним рознесенням каналів (FDD).
4. Точка доступу в системі радіозв'язку з багатоканальним входом, багатоканальним виходом (МІМО), яка містить
блок вибору режиму, який діє для вибору режиму просторового мультиплексування з декількох режимів просторового мультиплексування, що підтримуються точкою доступу, причому кожний з декількох режимів просторового мультиплексування підтримує одночасну передачу багатьох потоків символів даних через багато просторових каналів МІМО-каналу, сформованих декількома антенами в точці доступу,
процесор просторової обробки передачі, який діє для просторової обробки перших декількох потоків символів даних, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків символів передачі для передачі з декількох антен і через першу лінію зв'язку, і
процесор просторової обробки прийому, який діє для просторової обробки декількох потоків прийнятих символів, одержаних з декількох антен, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків відновлених символів даних, які є оцінками других декількох потоків символів даних, переданих через другу лінію зв'язку, при цьому МІМО-система є системою дуплексної передачі з частотним рознесенням каналів (FDD).
Текст
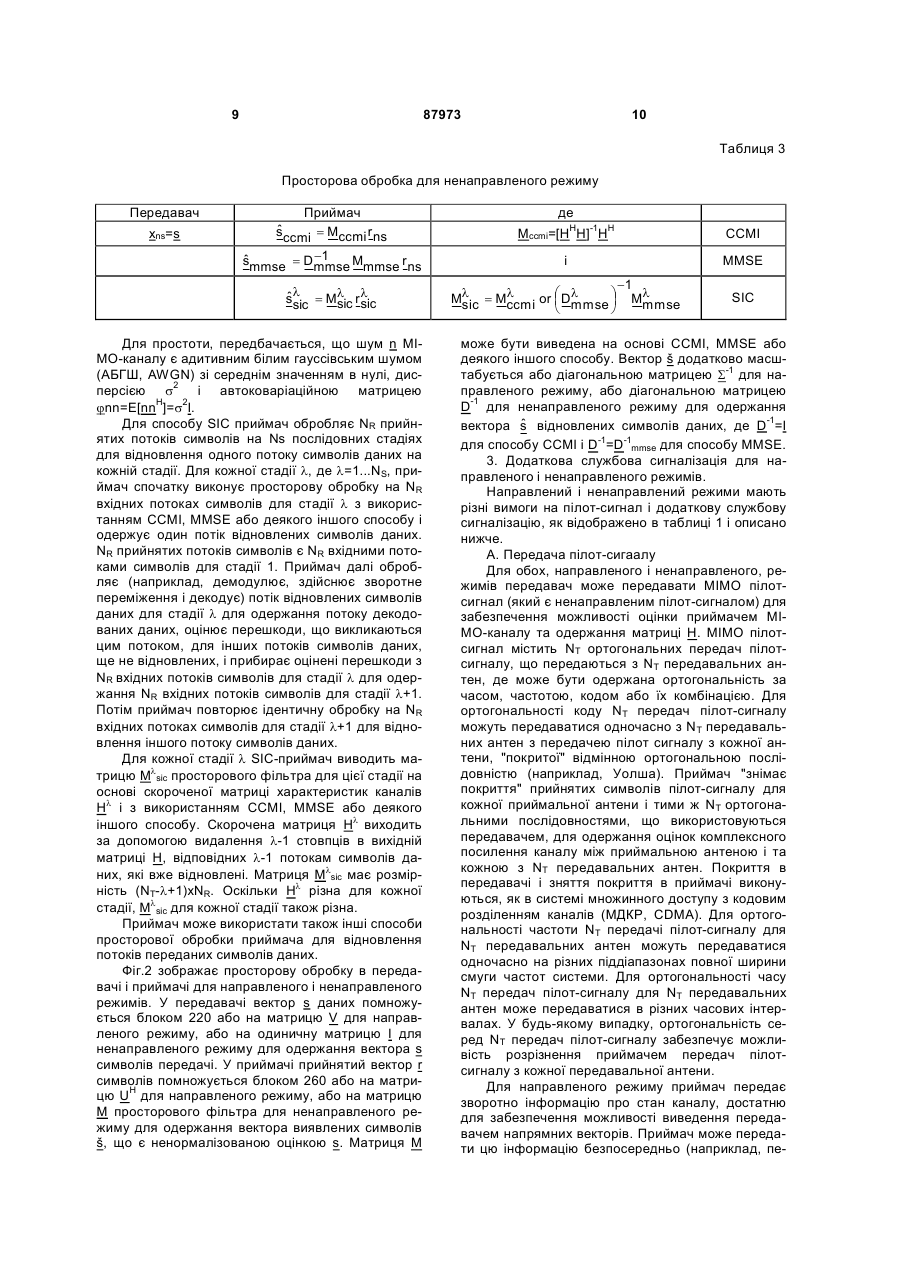
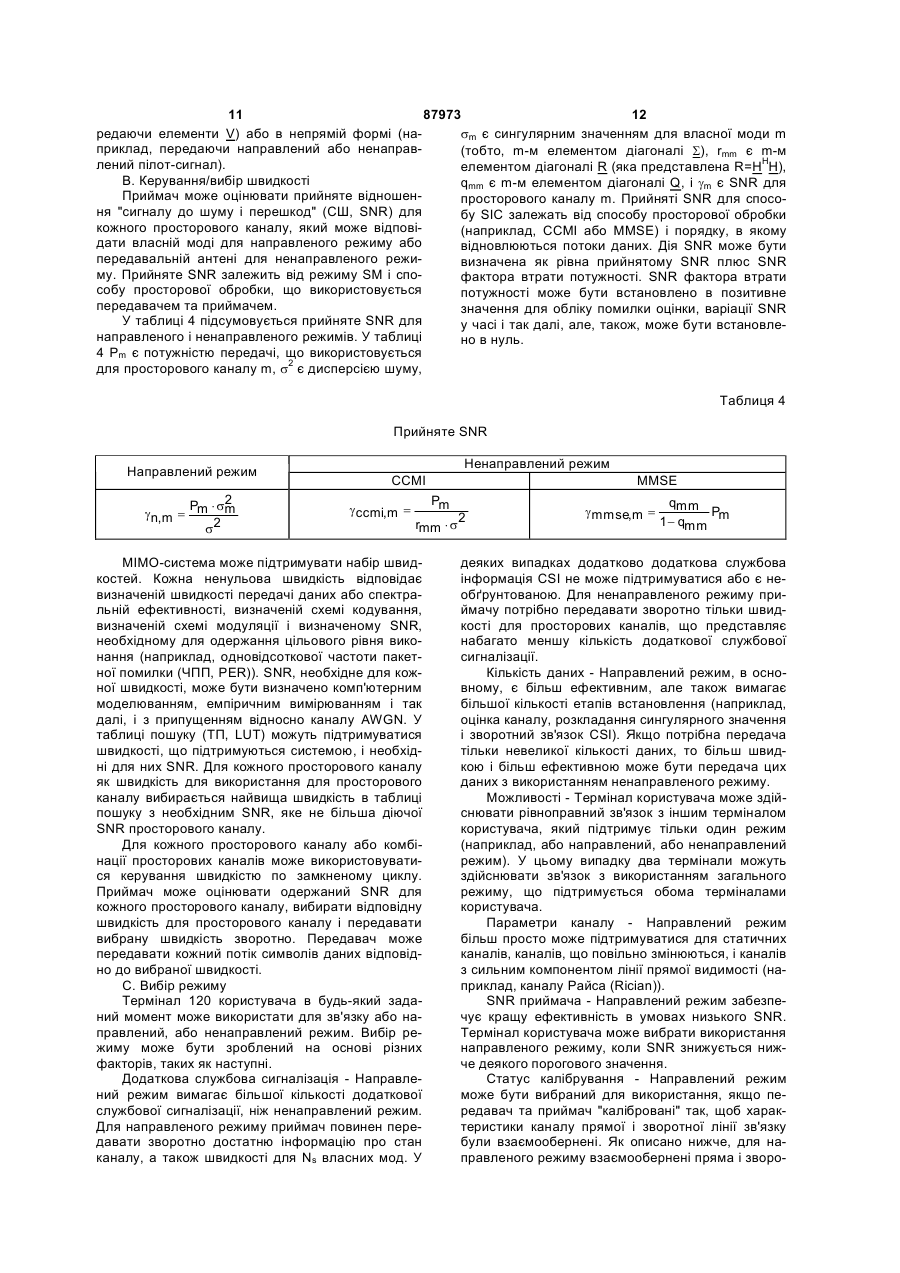
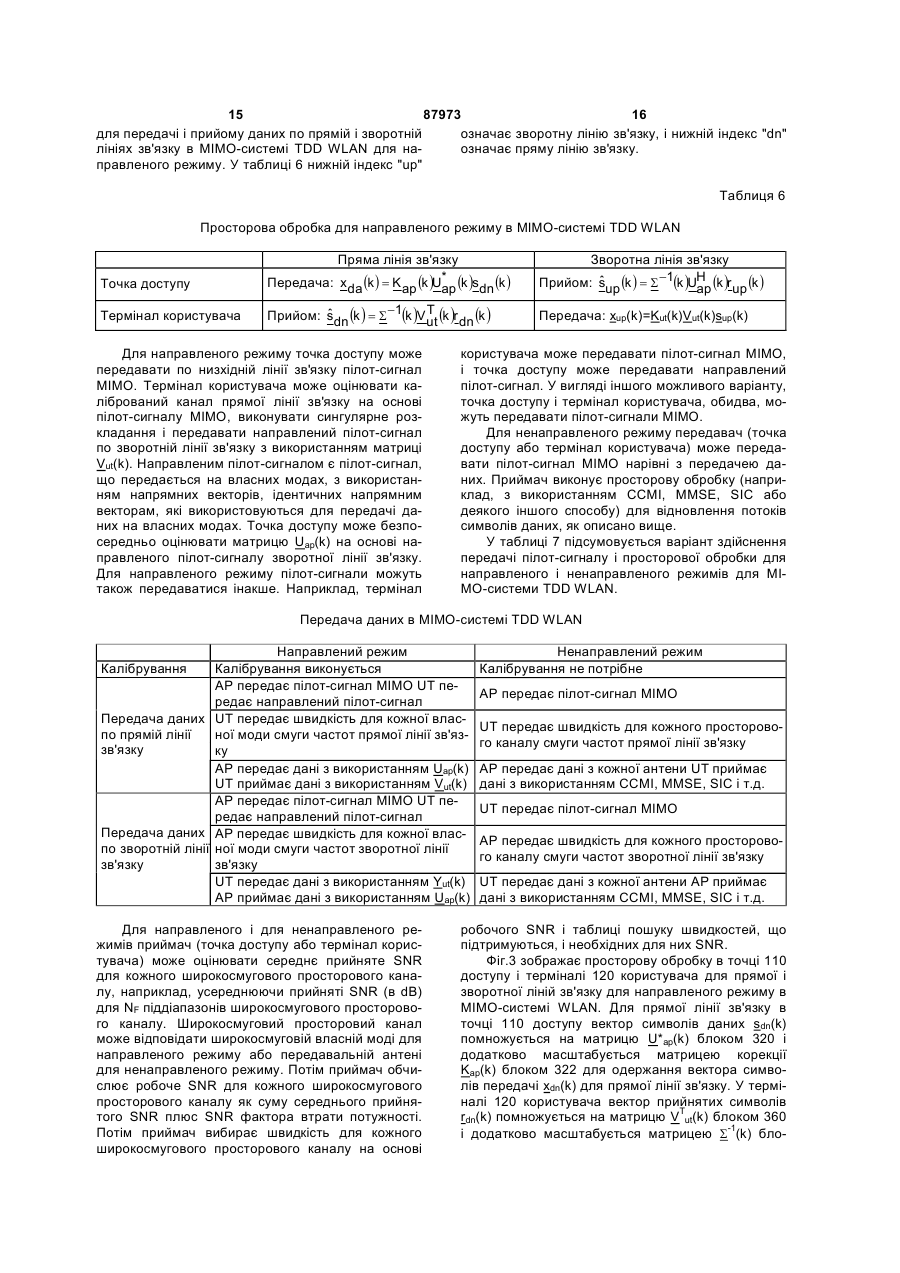
1. Термінал в системі радіозв'язку з багатоканальним входом, багатоканальним виходом (МІМО), який містить блок вибору режиму, який діє для вибору режиму просторового мультиплексування з декількох режимів просторового мультиплексування, що підтримуються терміналом, причому кожний з декількох режимів просторового мультиплексування підтримує одночасну передачу багатьох потоків символів даних через багато просторових каналів МІМО-каналу, сформованих декількома антенами в терміналі, процесор просторової обробки передачі, який діє для просторової обробки перших декількох потоків символів даних, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків символів передачі для передачі з декількох антен і через першу лінію зв'язку, і процесор просторової обробки прийому, який діє для просторової обробки декількох потоків прийнятих символів, одержаних з декількох антен, відповідно до вибраного режиму просторового мультиплексування, для одержання декількох потоків відновлених символів даних, які є оцінками других декількох потоків символів даних, переданих через другу лінію зв'язку, при цьому МІМО-система є системою дуплексної передачі з частотним рознесенням каналів (FDD). 2 (19) 1 3 87973 4 них, переданих через другу лінію зв'язку, при цьопроцесор просторової обробки передачі, який діє му МІМО-система є системою дуплексної передачі для просторової обробки перших декількох потоків з частотним рознесенням каналів (FDD). символів даних, відповідно до вибраного режиму 4. Точка доступу в системі радіозв'язку з багатокапросторового мультиплексування, для одержання нальним входом, багатоканальним виходом (МІдекількох потоків символів передачі для передачі з МО), яка містить декількох антен і через першу лінію зв'язку, і блок вибору режиму, який діє для вибору режиму процесор просторової обробки прийому, який діє просторового мультиплексування з декількох редля просторової обробки декількох потоків прийнжимів просторового мультиплексування, що підятих символів, одержаних з декількох антен, відтримуються точкою доступу, причому кожний з повідно до вибраного режиму просторового мульдекількох режимів просторового мультиплексувантиплексування, для одержання декількох потоків ня підтримує одночасну передачу багатьох потоків відновлених символів даних, які є оцінками других символів даних через багато просторових каналів декількох потоків символів даних, переданих через МІМО-каналу, сформованих декількома антенами другу лінію зв'язку, при цьому МІМО-система є в точці доступу, системою дуплексної передачі з частотним рознесенням каналів (FDD). Вимога пріоритету за §119 U.S.C. 35 (звід законів США). Дана заявка на патент претендує на пріоритет попередньої заявки з порядковим номером 60/421.309, яка називається "ΜΙΜΟ WLAN System", зареєстрованої 25 жовтня 2002p., право на яку передане правонаступнику даного винаходу, і яка включена в даний опис у всій своїй повноті за посиланням. Даний винахід, в основному, відноситься до зв'язку і, більш конкретно, до термінала користувача в системі зв'язку з багатоканальним входом, багатоканальним виходом (БВБВ, ΜΙΜΟ). МІМО-система використовує для передачі даних декілька (ΝΤ) передавальних антен і декілька (NR) приймальних антен, і позначається як система (ΝΤ, NR). МІМО-канал, сформований ΝΤ передавальними і NR приймальними антенами, може бути розкладений на Ns просторових каналів, де Ns£min{ΝΤ, NR}. Для досягнення більшої загальної пропускної здатності для передачі Ns незалежних потоків даних можуть використовуватися Ns просторових каналів. В основному, для одночасної передачі і відновлення декількох потоків даних просторова обробка звичайно виконується в приймачі і може виконуватися або не виконуватися в передавачі. Стандартна МІМО-система звичайно використовує певну схему передачі для одночасної передачі декількох потоків даних. Ця схема передачі може бути вибрана на основі компромісу між різними факторами, такими як вимоги до системи, кількість зворотного зв'язку з приймача в передавач, можливості передавача та приймача і так далі. Передавач, приймач та система, до того ж, розроблені для підтримки вибраної схеми передачі і функціонування відповідно до неї. Вказана схема передачі звичайно має переважні ознаки, а також несприятливі ознаки, які можуть впливати на ефективність системи. Отже, в техніці існує потреба в терміналі користувача, виконаному з можливістю досягнення підвищеної ефективності. Тут описаний термінал користувача, якийпідтримує декілька режимів просторового мультиплексування (ПМ, SM) для підвищеної ефективності і більшої гнучкості. Просторове мультиплексування відноситься до одночасної передачі декількох потоків даних через декілька просторових каналів МІМО-каналу. Декілька режимів SM можуть включати в себе (1) направлений режим, при якому здійснюється передача декількох потоків даних по ортогональних просторових каналах і (2) ненаправлений режим, при якому здійснюється передача декількох потоків даних з декількох антен. Термінал вибирає з декількох підтримуваних режимом SM режим SM для використання при передачі даних. Вибір режимів SM може основуватися на різних факторах, таких як статус калібрування термінала, кількість даних для передачі, параметри каналу, можливості іншого об'єкта зв'язку тощо. Для передачі даних декілька потоків даних кодуються і модулюються, відповідно до їх вибраних швидкостей, для одержання декількох потоків символів даних. Потім, відповідно до вибраного режиму SM, здійснюється просторова обробка цих потоків символів даних для одержання декількох потоків символів передачі. Просторова обробка передачі здійснюється матрицею напрямних векторів для направленого режиму і одиничною матрицею для ненаправленого режиму. Потоки символів передачі передаються з декількох антен і через першу лінію зв'язку (наприклад, зворотну лінію зв'язку). Для прийому даних відповідно до вибраного режиму SM здійснюється просторова обробка декількох потоків прийнятих символів для другої лінії зв'язку (наприклад, прямої лінії зв'язку) для одержання декількох потоків відновлених символів даних. Просторова обробка прийому може основуватися на власних векторах каналу для направленого режиму і матрицею просторового фільтра для ненаправленого режиму. Як описано нижче, матриця просторового фільтра може бути виведена на основі різних способів просторової обробки приймача. Потім потоки відновлених символів даних демодулюються та декодуються відповідно до їх вибраних швидкостей для одержання декількох потоків декодованих даних для другої лінії зв'язку. Термінал також передає/приймає пілот-сигнали і вибрані швидкості для кожної лінії зв'язку. Нижче більш детально описані різні аспекти, варіанти здійснення та ознаки винаходу. 5 87973 6 Фіг.1 зображає МІМО-систему. стувача в точки доступу. Також, МІМО-система 100 Фіг.2 зображає просторову обробку в передаможе використовувати для передачі даних одну вачі та приймачі для направлених і ненаправлених несучу або декілька несучих. режимів. Для підвищення ефективності та більшої гнучФіг.3 та 4 зображають просторову обробку в кості точка ПО доступу і термінал 120 користувача, точці доступу і терміналі користувача для направкожні, підтримують декілька режимів просторового лених та ненаправлених режимів, відповідно. мультиплексування (ПМ, SM). Звичайно направФіг.5 зображає блокову діаграму термінала лений режим SM (або просто, направлений режим) користувача і точки доступу. може досягати кращої ефективності, але може Фіг.6 зображає процес передачі і прийому давикористовуватися тільки, якщо передавач має них в МІМО-системі. Докладний опис переважних достатню інформацію про стан каналу (ІСК, CSI) варіантів здійснення для ортогоналізації просторових каналів МІМОСлово "можливий" використовується тут в каналу через розкладання або деякий інший спозначенні "який слугує у вигляді можливого варіансіб. Ненаправлений режим SM (або просто, ненапту, прикладу або ілюстрації". Будь-який варіант равлений режим) вимагає дуже невеликої кількості здійснення, описаний тут як "можливий", не повиінформації для одночасної передачі декількох понен обов'язково розглядатися як пріоритетний або токів даних через МІМО-канал, але ефективність такий, що має переваги перед іншими варіантами може бути не такою хорошою, як у направленого здійснення. режиму. Застосовний для використання режим SM Фіг.1 зображає МІМО-систему 100 з точками може вибиратися на основі різних факторів, як доступу (ТД, АР) і терміналами користувача (ТК, описано нижче. UT). Для простоти на Фіг.1 зображена тільки одна У таблиці 1 підсумовуються деякі ключові асточка 110 доступу. Точкою доступу, в основному, є пекти направленого і ненаправленого режимів. стаціонарна станція, яка здійснює зв'язок з терміКожний режим SM має різні можливості і вимоги. налами користувача і, також, може бути визначена Для направленого режиму передавач передає як базова станція або з використанням деякої інпілот-сигнал для забезпечення можливості оцінки шої термінології. Контролер 130 системи з'єднаний приймачем МІМО-каналу, і приймач передає звоз точками доступу і забезпечує їх координацію і ротно інформацію про стан каналу, достатню для керування для них. Термінал користувача може забезпечення можливості виведення передавачем бути стаціонарним або мобільним і, також, може напрямних векторів. Або передавач або приймач бути визначений як мобільна станція, пристрій розкладає МІМО-канал на власні моди, які можуть радіозв'язку або з використанням деякої іншої терозглядатися як ортогональні просторові канали. рмінології. Термінал користувача може здійснюваПриймач також передає зворотно швидкість для ти зв'язок з точкою доступу, в цьому випадку вставикористання для кожної власної моди. Передавач новлюються ролі точки доступу і термінала і приймач, обидва, виконують просторову обробку користувача. Термінал користувача може також для передачі даних на власних модах, як описано здійснювати рівноправний зв'язок з іншим термінижче. налом користувача. Для ненаправленого режиму передавач переМІМО-системою 100 може бути система дупдає пілот-сигнал для забезпечення можливості лексної передачі з часовим рознесенням каналів оцінки приймачем МІМО-каналу. Приймач передає (ДЧасР, TDD) або система дуплексної передачі з зворотно швидкість для використання для кожного частотним рознесенням каналів (ДЧР, FDD). Для просторового каналу. Передавач передає дані системи TDD пряма і зворотна лінія зв'язку спільно (наприклад, зі своїх антен) без будь-якої простовикористовують один діапазон. Для системи FDD рової обробки, і приймач виконує просторову обпряма і зворотна лінія зв'язку використовують різні робку для відновлення переданих даних. Передадіапазони. Прямою лінією зв'язку є лінія зв'язку з ча пілот-сигналу і просторова обробка в точок доступу в термінали користувача, і зворотпередавачі та приймачі для направленого і ненапною лінією зв'язку є лінія зв'язку з терміналів кориравленого режимів описані нижче. Таблиця 1 Вимоги на направлений і ненаправлений режими Направлений режим Ненаправлений режим Передавач передає пілот-сигнал. Приймач передає зворотно інформацію стану каналу, Пілот-сигнал Передавач передає пілот-сигнал. що використовується передавачем для виведення напрямних векторів. Зворотний Приймач передає зворотно швидкість для коПриймач передає зворотно швидкість для зв'язок по жного просторового каналу (наприклад, кожної кожної власної моди. швидкості передавальної антени). Передавач виконує просторову обробку мат- Передавач передає дані з кожної передавальПросторова рицею V напрямних векторів. Приймач вико- ної антени. Приймач виконує просторову обобробка нує просторову обробку матрицею U власних робку CCML, MMSE, SIC і т.д. (описано нижмод. че). 7 87973 8 У подальшому описі терміналом користувача режиму. У таблиці 2 s є вектором з Ns символами може бути передавач і/або приймач і точкою доданих для передачі на Ns власних модах Н, xst є вектором з ΝΤ символами передачі для передачі з ступу, аналогічно, може бути передавач і/або приΝΤ передавальних антен, rst є вектором з NR приймач. Рівноправний зв'язок може підтримуватися з використанням тих самих базових принципів. йнятими символами, одержаними з NR приймаль1. Направлений режим ˆ них антен, s st є вектором з Ns відновленими симМІМО-канал, сформований ΝΤ передавальниˆ волами даних (тобто, s st є оцінкою s), і нижній ми антенами та NR приймальними антенами, може описуватися матрицею Η характеристик каналів індекс "st" означає направлений режим. "Символ NRxΝΤ, яка може бути виражена таким чином: даних", що використовується тут, відноситься до символу модуляції для даних, і "символ пілотсигналу" відноситься до символу модуляції для h11 h12 L h1,N ù é , , Т пілот-сигналу. ê ú h12 h2,2 L h2,N ú , ê Т H= ê рівн. (1) M M M ú O Таблиця 2 ê ú êhNr ,1 hNr ,2 L hNr ,Nn ú ë û Просторова обробка для направленого режиму де елемент hi,j, для i=1...NR та j=1...NT, є з'єднанням (тобто, комплексним посиленням) між передавальною антеною j та приймальною антеною і. Для простоти, передбачається, що МІМО-канал має повний ранг NS£NT£NR. Розкладання одного значення може бути виконане на Η для одержання Ns власних мод Н, таким чином: H = Uå VH Передавач xst=Vs Розкладання власного значення може бути виконане також на кореляційній матриці Н, яка предН ставлена R=Н Н, таким чином: H R=H H=VLVH рівн. (2) де U є унітарною матрицею (NRxNR) лівих власних векторів Н, S є діагональною матрицею (NRxNT) сингулярних значень Н, V є унітарною матрицею (NTxNT) правих власних векторів Н, і "H" означає спряжене транспонування. Унітарна матриця Μ описується властивістю МHМ=І, де І є одиничною матрицею. Стовпці унітарної матриці ортогональні один одному. Праві власні вектори Η також визначаються як напрямні вектори і можуть використовуватися для просторової обробки передавачем для передачі даних на Ns власних модах Н. Ліві власні вектори Η можуть використовуватися для просторової обробки приймачем для відновлення даних, переданих на Ns власних модах. Власні моди можуть розглядатися як ортогональні просторові канали, одержані через розкладання. Діагональними елементами S є сингулярні значення Н, які представляють посилення каналу для Ns власних мод. У реальній системі може бути одержана тільки оцінка Н, і можуть бути виведені тільки оцінки V, S та U. Через різні причини, такі як неточна оцінка каналу, Ns просторових каналів також звичайно не повністю ортогональні один одному. Для простоти, тут в описі передбачається, що розкладання і оцінка каналу здійснюються без помилок. Крім того, термін "власна мода" охоплює випадок, де робиться спроба ортогоналізувати просторові канали з використанням розкладання, навіть якщо спроба не може бути повністю успішною, наприклад, через неточну оцінку каналу. У таблиці 5 підсумовується просторова обробка в передавачі та приймачі для направленого Приймач ˆ s st = S -1UHr st рівн. (3) де L є діагональною матрицею власних значень, які є квадратами сингулярних значень в S. Передавач може виконувати просторову обробку з використанням V для одержання xst, і приймач може виконувати просторову обробку з викорисˆ s танням VHHH для одержання st . 2. Ненаправлений режим Для ненаправленого режиму передавач може передавати один потік символів даних з кожної передавальної антени. Просторовий канал для цього режиму може відповідати одній передавальній антені. Приймач виконує просторову обробку для виділення і відновлення переданого потоку символів даних. Приймач може використати різні способи обробки приймача, такі як спосіб інверсії кореляційної матриці каналів (ІКМК, ССМІ) (також відомий як спосіб обернення в нуль незначущих коефіцієнтів (в матриці)), спосіб мінімальної середньоквадратичної помилки (МСКП, MMSE), спосіб послідовного приглушення перешкод (ППП, SIC) тощо. Таблиця 3 підсумовує просторову обробку в передавачі та приймачі для ненаправленого режиму. У таблиці 3 xns є вектором з ΝΤ символами даних для передачі з ΝΤ передавальних антен, rns є вектором з NR прийнятими символами, одержаними з NR приймальних антен, Мccmi є матрицею просторового фільтра для способу ССМІ, Mmmse є матрицею просторового фільтра для способу MMSE, Dmmse є діагональною матрицею для способу MMSE (яка містить діагональні елементи MmmseH і нижній індекс "ns" означає ненаправлений режим. 9 87973 10 Таблиця 3 Просторова обробка для ненаправленого режиму Передавач xns=s Приймач ˆ sccmi = Mccmi r ns -1 ˆ smmse = Dmmse Mmmse r ns ˆ s l = Ml r l sic sic sic Для простоти, передбачається, що шум n МІМО-каналу є адитивним білим гауссівським шумом (АБГШ, AWGN) зі середнім значенням в нулі, дисперсією s2 і автоковаріаційною матрицею Η 2 jnn=Ε[nn ]=s Ι. Для способу SIC приймач обробляє NR прийнятих потоків символів на Ns послідовних стадіях для відновлення одного потоку символів даних на кожній стадії. Для кожної стадії l, де l=1...ΝS, приймач спочатку виконує просторову обробку на NR вхідних потоках символів для стадії l з використанням ССМІ, MMSE або деякого іншого способу і одержує один потік відновлених символів даних. NR прийнятих потоків символів є NR вхідними потоками символів для стадії 1. Приймач далі обробляє (наприклад, демодулює, здійснює зворотне переміження і декодує) потік відновлених символів даних для стадії l для одержання потоку декодованих даних, оцінює перешкоди, що викликаються цим потоком, для інших потоків символів даних, ще не відновлених, і прибирає оцінені перешкоди з NR вхідних потоків символів для стадії l для одержання NR вхідних потоків символів для стадії l+1. Потім приймач повторює ідентичну обробку на NR вхідних потоках символів для стадії l+1 для відновлення іншого потоку символів даних. Для кожної стадії l SIC-приймач виводить матрицю Ml sic просторового фільтра для цієї стадії на основі скороченої матриці характеристик каналів Ηl і з використанням ССМІ, MMSE або деякого іншого способу. Скорочена матриця Ηl виходить за допомогою видалення l-1 стовпців в вихідній матриці Н, відповідних l-1 потокам символів даних, які вже відновлені. Матриця Mlsic має розмірність (ΝΤ-l+1)xΝR. Оскільки Ηl різна для кожної стадії, Ml sic для кожної стадії також різна. Приймач може використати також інші способи просторової обробки приймача для відновлення потоків переданих символів даних. Фіг.2 зображає просторову обробку в передавачі і приймачі для направленого і ненаправленого режимів. У передавачі вектор s даних помножується блоком 220 або на матрицю V для направленого режиму, або на одиничну матрицю І для ненаправленого режиму для одержання вектора s символів передачі. У приймачі прийнятий вектор r символів помножується блоком 260 або на матриH цю U для направленого режиму, або на матрицю Μ просторового фільтра для ненаправленого режиму для одержання вектора виявлених символів š, що є ненормалізованою оцінкою s. Матриця Μ де Mccmi=[HHH]-1HH ССМІ і MMSE l l Ml = Mccmi or æ Dmmse ö ç ÷ sic è ø -1 l Mmmse SIC може бути виведена на основі ССМІ, MMSE або деякого іншого способу. Вектор š додатково масш-1 табується або діагональною матрицею S для направленого режиму, або діагональною матрицею D-1 для ненаправленого режиму для одержання ˆ вектора s відновлених символів даних, де D-1= І для способу ССМІ і D-1=D-1mmse для способу MMSE. 3. Додаткова службова сигналізація для направленого і ненаправленого режимів. Направлений і ненаправлений режими мають різні вимоги на пілот-сигнал і додаткову службову сигналізацію, як відображено в таблиці 1 і описано нижче. А. Передача пілот-сигаалу Для обох, направленого і ненаправленого, режимів передавач може передавати ΜΙΜΟ пілотсигнал (який є ненаправленим пілот-сигналом) для забезпечення можливості оцінки приймачем МІМО-каналу та одержання матриці Η. ΜΙΜΟ пілотсигнал містить ΝΤ ортогональних передач пілотсигналу, що передаються з ΝΤ передавальних антен, де може бути одержана ортогональність за часом, частотою, кодом або їх комбінацією. Для ортогональності коду ΝΤ передач пілот-сигналу можуть передаватися одночасно з ΝΤ передавальних антен з передачею пілот сигналу з кожної антени, "покритої" відмінною ортогональною послідовністю (наприклад, Уолша). Приймач "знімає покриття" прийнятих символів пілот-сигналу для кожної приймальної антени і тими ж ΝΤ ортогональними послідовностями, що використовуються передавачем, для одержання оцінок комплексного посилення каналу між приймальною антеною і та кожною з ΝΤ передавальних антен. Покриття в передавачі і зняття покриття в приймачі виконуються, як в системі множинного доступу з кодовим розділенням каналів (МДКР, CDMA). Для ортогональності частоти ΝΤ передачі пілот-сигналу для ΝΤ передавальних антен можуть передаватися одночасно на різних піддіапазонах повної ширини смуги частот системи. Для ортогональності часу ΝΤ передач пілот-сигналу для ΝΤ передавальних антен може передаватися в різних часових інтервалах. У будь-якому випадку, ортогональність серед ΝΤ передач пілот-сигналу забезпечує можливість розрізнення приймачем передач пілотсигналу з кожної передавальної антени. Для направленого режиму приймач передає зворотно інформацію про стан каналу, достатню для забезпечення можливості виведення передавачем напрямних векторів. Приймач може передати цю інформацію безпосередньо (наприклад, пе 11 87973 12 редаючи елементи V) або в непрямій формі (наsm є сингулярним значенням для власної моди m приклад, передаючи направлений або ненаправ(тобто, m-м елементом діагоналі S), rmm є m-м H лений пілот-сигнал). елементом діагоналі R (яка представлена R=H H), В. Керування/вибір швидкості qmm є m-м елементом діагоналі Q, і gm є SNR для Приймач може оцінювати прийняте відношенпросторового каналу m. Прийняті SNR для спосоня "сигналу до шуму і перешкод" (СШ, SNR) для бу SIC залежать від способу просторової обробки кожного просторового каналу, який може відпові(наприклад, ССМІ або MMSE) і порядку, в якому дати власній моді для направленого режиму або відновлюються потоки даних. Дія SNR може бути передавальній антені для ненаправленого реживизначена як рівна прийнятому SNR плюс SNR му. Прийняте SNR залежить від режиму SM і спофактора втрати потужності. SNR фактора втрати собу просторової обробки, що використовується потужності може бути встановлено в позитивне передавачем та приймачем. значення для обліку помилки оцінки, варіації SNR У таблиці 4 підсумовується прийняте SNR для у часі і так далі, але, також, може бути встановленаправленого і ненаправленого режимів. У таблиці но в нуль. 4 Рm є потужністю передачі, що використовується для просторового каналу m, s2 є дисперсією шуму, Таблиця 4 Прийняте SNR Направлений режим P × s2 gn,m = m m s2 Ненаправлений режим ССМІ MMSE Pm g ccmi,m = rmm × s2 МІМО-система може підтримувати набір швидкостей. Кожна ненульова швидкість відповідає визначеній швидкості передачі даних або спектральній ефективності, визначеній схемі кодування, визначеній схемі модуляції і визначеному SNR, необхідному для одержання цільового рівня виконання (наприклад, одновідсоткової частоти пакетної помилки (ЧПП, PER)). SNR, необхідне для кожної швидкості, може бути визначено комп'ютерним моделюванням, емпіричним вимірюванням і так далі, і з припущенням відносно каналу AWGN. У таблиці пошуку (ТП, LUT) можуть підтримуватися швидкості, що підтримуються системою, і необхідні для них SNR. Для кожного просторового каналу як швидкість для використання для просторового каналу вибирається найвища швидкість в таблиці пошуку з необхідним SNR, яке не більша діючої SNR просторового каналу. Для кожного просторового каналу або комбінації просторових каналів може використовуватися керування швидкістю по замкненому циклу. Приймач може оцінювати одержаний SNR для кожного просторового каналу, вибирати відповідну швидкість для просторового каналу і передавати вибрану швидкість зворотно. Передавач може передавати кожний потік символів даних відповідно до вибраної швидкості. С. Вибір режиму Термінал 120 користувача в будь-який заданий момент може використати для зв'язку або направлений, або ненаправлений режим. Вибір режиму може бути зроблений на основі різних факторів, таких як наступні. Додаткова службова сигналізація - Направлений режим вимагає більшої кількості додаткової службової сигналізації, ніж ненаправлений режим. Для направленого режиму приймач повинен передавати зворотно достатню інформацію про стан каналу, а також швидкості для Ns власних мод. У gmmse,m = qmm Pm 1- qmm деяких випадках додатково додаткова службова інформація CSI не може підтримуватися або є необґрунтованою. Для ненаправленого режиму приймачу потрібно передавати зворотно тільки швидкості для просторових каналів, що представляє набагато меншу кількість додаткової службової сигналізації. Кількість даних - Направлений режим, в основному, є більш ефективним, але також вимагає більшої кількості етапів встановлення (наприклад, оцінка каналу, розкладання сингулярного значення і зворотний зв'язок CSI). Якщо потрібна передача тільки невеликої кількості даних, то більш швидкою і більш ефективною може бути передача цих даних з використанням ненаправленого режиму. Можливості - Термінал користувача може здійснювати рівноправний зв'язок з іншим терміналом користувача, який підтримує тільки один режим (наприклад, або направлений, або ненаправлений режим). У цьому випадку два термінали можуть здійснювати зв'язок з використанням загального режиму, що підтримується обома терміналами користувача. Параметри каналу - Направлений режим більш просто може підтримуватися для статичних каналів, каналів, що повільно змінюються, і каналів з сильним компонентом лінії прямої видимості (наприклад, каналу Райса (Rician)). SNR приймача - Направлений режим забезпечує кращу ефективність в умовах низького SNR. Термінал користувача може вибрати використання направленого режиму, коли SNR знижується нижче деякого порогового значення. Статус калібрування - Направлений режим може бути вибраний для використання, якщо передавач та приймач "калібровані" так, щоб характеристики каналу прямої і зворотної лінії зв'язку були взаємообернені. Як описано нижче, для направленого режиму взаємообернені пряма і зворо 13 87973 14 тна лінії зв'язку можуть спростити передачу пілотМожлива МІМО-система WLAN є системою сигналу і просторову обробку і для передавача і TDD. Звичайно для системи TDD існує високий для приймача. ступінь кореляції між характеристиками прямої і Термінал користувача, що не є мобільним і що зворотної ліній зв'язку, оскільки ці лінії зв'язку спіздійснює зв'язок з однією точкою доступу, може льно використовують один частотний діапазон. тривалий час використовувати направлений реОднак характеристики каналів передачі/прийому в жим. Термінал користувача, що є мобільним і що точці доступу звичайно не ідентичні характеристиздійснює зв'язок з різними об'єктами (наприклад, кам каналів передачі/прийому в терміналі користурізними точками доступу і/або іншими терміналавача. Відмінності можуть бути визначені і враховами користувача), може використовувати ненапрані за допомогою калібрування. Тоді може бути влений режим до моменту часу, коли стає більш прийнято, що повні характеристики прямої і зворовигідним використання направленого режиму. Тетної ліній зв'язку є взаємноберненими (тобто, рмінал користувача також може, відповідно, перетранспонованими). З взаємооберненими прямою і микатися між направленим і ненаправленим резворотною лініями зв'язку оцінка каналу і простожимами. Наприклад, термінал користувача може рова обробка для направленого режиму можуть використати ненаправлений режим для малих бути спрощені. пакетів даних (або коротких сеансів передачі даФіг.3 зображає канали передачі/прийому в тоних) і на початку довгих пакетів даних (або тривачці 110 доступу і терміналі 120 користувача. У точлих сеансів передачі даних), і може використовуці 110 доступу канал 324 передачі і канал 334 привати направлений режим для іншої частини довгих йому моделюються матрицями Тар(k) та Rap(k), відповідно, для кожного піддіапазону k. В термінапакетів даних. У вигляді іншого можливого варіанлі 120 користувача канал 364 передачі і канал 354 ту, термінал користувача може використовувати прийому моделюються матрицями Tut(k) та Rut(k), направлений режим для каналу з відносно статичними параметрами і може використовувати ненапвідповідно, для кожного піддіапазону k. равлений режим, коли параметри каналу змінюУ таблиці 5 підсумовується калібрування і розються більш швидко. кладання сингулярного значення для прямої і зво4. TDD МІМО-система ротної ліній зв'язку в МІМО-системі TDD WLAN. Нижче описаний багаторежимний термінал ко"Робочі" характеристики каналу прямої і зворотної ристувача для можливої МІМО-системи безпровіліній зв'язку, Hedn(k) та Hedp(k), включають в себе дної локальної мережі (ЛСР, WLAN). У МІМОхарактеристики відповідних каналів передачі і системі WLAN використовується ортогональне прийому. Діагональні матриці корекції Kар(k) та мультиплексування розподілу частоти (ОМРЧ, Kut(k) виходять за допомогою виконання калібруOFDM), яке є способом модуляції декількох несування пілот-сигналами ΜΙΜΟ, що передаються і чих, що ефективно розділяє повну ширину смуги терміналом користувача і точкою доступу. Харакчастот системи на декілька (NF) ортогональних теристики "каліброваного" каналу прямої і зворотпіддіапазонів. При OFDM кожний піддіапазон зіної ліній зв'язку, Hcdn(k) та Hcup(k), включають в себе матриці корекції і є взаємооберненими (тобто ставлений відповідній несучій, яка може бути моT Hcup(k)=H cdn(k), де "Т" означає транспонування). дульована даними. Таблиця 5 Характеристики каналу для МІМО-системи TDD WLAN Робоча характеристика каналу Матриця корекції Характеристика каліброваного каналу Розкладання сингулярного значення Пряма лінія зв'язку Hcdn(k)=Rut(k)H(k)Tap(k) -1 K ap (k ) = Tap (k )Rap (k ) Hcdn(k)=Hedn(k)Kар(k) * Hedn (k ) = Vut (k )S (k )U* (k ) ap Оскільки Hcdn(k) та Hcup(k) взаємообернені, то матриці V*ut(k) та U*ap(k) лівих і правих власних векторів Hcdn(k) є комплексно спряженими матрицям Vut(k) та Uap(k) правих і лівих власних векторів _CUP (К). Матриця Uap(k) може використовуватися точкою 110 доступу для просторової обробки і передачі і прийому. Матриця Vut(k) може використовуватися терміналом 120 користувача для просторової обробки і передачі і прийому. Сингулярне розкладання може виконуватися незалежно для кожного з NF піддіапазонів. Для кожного піддіапазона сингулярні значення в S(k) можуть бути впорядковані від найбільшого до найменшого, і власні вектори в V(k) та U(k) можуть Зворотна лінія зв'язку Hcup(k)=Rap(k)HT(k)Tut(k) Kut (k ) = Tut1(k )Rut (k ) Hcup(k)=Heup(k)Kut(k) * * Hcap (k ) = V ap (k )S (k )Uut (k ) бути впорядковані відповідно. "Широкосмугова" власна мода може бути визначена як набір власних мод одного порядку для всіх NF піддіапазонів після упорядкування. Потрібне виконання розкладання тільки або терміналом 120 користувача, або точкою 110 доступу. Якщо воно виконується терміналом 120 користувача, то точці 110 доступу можуть бути забезпечені матриці Uap(k), для k=1...NF, або безпосередньо (наприклад, за допомогою передачі елементів Uap(k)), або в непрямій формі (наприклад, за допомогою передачі направленого пілот-сигналу). У таблиці 6 підсумовується просторова обробка в точці 110 доступу і терміналі 120 користувача 15 87973 16 для передачі і прийому даних по прямій і зворотній означає зворотну лінію зв'язку, і нижній індекс "dn" лініях зв'язку в МІМО-системі TDD WLAN для наозначає пряму лінію зв'язку. правленого режиму. У таблиці 6 нижній індекс "up" Таблиця 6 Просторова обробка для направленого режиму в МІМО-системі TDD WLAN Точка доступу Пряма лінія зв'язку Передача: x da (k ) = K ap (k )U* (k )sdn (k ) ap Зворотна лінія зв'язку ˆ Прийом: sup (k ) = S -1(k )UH (k )r up (k ) ap Термінал користувача T ˆ Прийом: sdn (k ) = S-1(k )Vut (k )r dn (k ) Передача: xup(k)=Kut(k)Vut(k)sup(k) Для направленого режиму точка доступу може передавати по низхідній лінії зв'язку пілот-сигнал ΜΙΜΟ. Термінал користувача може оцінювати калібрований канал прямої лінії зв'язку на основі пілот-сигналу ΜΙΜΟ, виконувати сингулярне розкладання і передавати направлений пілот-сигнал по зворотній лінії зв'язку з використанням матриці Vut(k). Направленим пілот-сигналом є пілот-сигнал, що передається на власних модах, з використанням напрямних векторів, ідентичних напрямним векторам, які використовуються для передачі даних на власних модах. Точка доступу може безпосередньо оцінювати матрицю Uap(k) на основі направленого пілот-сигналу зворотної лінії зв'язку. Для направленого режиму пілот-сигнали можуть також передаватися інакше. Наприклад, термінал користувача може передавати пілот-сигнал ΜΙΜΟ, і точка доступу може передавати направлений пілот-сигнал. У вигляді іншого можливого варіанту, точка доступу і термінал користувача, обидва, можуть передавати пілот-сигнали ΜΙΜΟ. Для ненаправленого режиму передавач (точка доступу або термінал користувача) може передавати пілот-сигнал ΜΙΜΟ нарівні з передачею даних. Приймач виконує просторову обробку (наприклад, з використанням ССМІ, MMSE, SIC або деякого іншого способу) для відновлення потоків символів даних, як описано вище. У таблиці 7 підсумовується варіант здійснення передачі пілот-сигналу і просторової обробки для направленого і ненаправленого режимів для МІМО-системи TDD WLAN. Передача даних в МІМО-системі TDD WLAN Направлений режим Калібрування виконується АР передає пілот-сигнал ΜΙΜΟ UT передає направлений пілот-сигнал Передача даних UT передає швидкість для кожної власпо прямій лінії ної моди смуги частот прямої лінії зв'яззв'язку ку АР передає дані з використанням Uap(k) UT приймає дані з використанням Vut(k) АР передає пілот-сигнал ΜΙΜΟ UT передає направлений пілот-сигнал Передача даних АР передає швидкість для кожної власпо зворотній лінії ної моди смуги частот зворотної лінії зв'язку зв'язку UT передає дані з використанням Yut(k) АР приймає дані з використанням Uap(k) Калібрування Для направленого і для ненаправленого режимів приймач (точка доступу або термінал користувача) може оцінювати середнє прийняте SNR для кожного широкосмугового просторового каналу, наприклад, усереднюючи прийняті SNR (в dB) для NF піддіапазонів широкосмугового просторового каналу. Широкосмуговий просторовий канал може відповідати широкосмуговій власній моді для направленого режиму або передавальній антені для ненаправленого режиму. Потім приймач обчислює робоче SNR для кожного широкосмугового просторового каналу як суму середнього прийнятого SNR плюс SNR фактора втрати потужності. Потім приймач вибирає швидкість для кожного широкосмугового просторового каналу на основі Ненаправлений режим Калібрування не потрібне АР передає пілот-сигнал ΜΙΜΟ UT передає швидкість для кожного просторового каналу смуги частот прямої лінії зв'язку АР передає дані з кожної антени UT приймає дані з використанням ССМІ, MMSE, SIC і т.д. UT передає пілот-сигнал ΜΙΜΟ АР передає швидкість для кожного просторового каналу смуги частот зворотної лінії зв'язку UT передає дані з кожної антени АР приймає дані з використанням ССМІ, MMSE, SIC і т.д. робочого SNR і таблиці пошуку швидкостей, що підтримуються, і необхідних для них SNR. Фіг.3 зображає просторову обробку в точці 110 доступу і терміналі 120 користувача для прямої і зворотної ліній зв'язку для направленого режиму в МІМО-системі WLAN. Для прямої лінії зв'язку в точці 110 доступу вектор символів даних sdn(k) помножується на матрицю U*ap(k) блоком 320 і додатково масштабується матрицею корекції Kар(k) блоком 322 для одержання вектора символів передачі xdn(k) для прямої лінії зв'язку. У терміналі 120 користувача вектор прийнятих символів T rdn(k) помножується на матрицю V ut(k) блоком 360 і додатково масштабується матрицею S-1(k) бло 17 87973 18 ком 362 для одержання вектора відновлених симний режим для використання, і може бути виконана, як описано вище. Кожний блок 522 передавача ˆ волів даних s dn (k ) для прямої лінії зв'язку. (TMTR) приймає та обробляє (наприклад, модуДля зворотної лінії зв'язку в терміналі 120 колює OFDM і узгоджує) відповідний потік символів ристувача вектор символів даних sup(k) помножупередачі для формування сигналу прямої лінії ється на матрицю Vut(k) блоком 390 і додатково зв'язку. Nap блоків 522а передавача через 522ар масштабується матрицею корекції Kut(k) модулем подають Nap сигналів прямої лінії зв'язку для пере392 для одержання вектора символів передачі дачі з Nap антен 524а через 524ар, відповідно. xup(k) для зворотної лінії зв'язку. У точці 110 достуУ терміналі 120 користувача Nut антени 552а пу прийнятий вектор символів rup(k) помножується через 552ut приймають Nap сигналів прямої лінії H на матрицю U ap(k) блоком 340 і додатково масшзв'язку, і кожна антена подає прийнятий сигнал у табується матрицею S-1(k) блоком 342 для одервідповідний блок 554 приймача (RCVR). Кожний жання вектора відновлених символів даних блок 554 приймача виконує обробку (наприклад, ˆ s up (k ) для зворотної лінії зв'язку. узгодження і демодуляцію OFDM), доповнюючу для виконаної блоками 522 передавача, і забезпеФіг.4 зображає просторову обробку в точці 110 чує потік прийнятих символів. Процесор 560 просдоступу і терміналі 120 користувача для передачі торової обробки (RX) виконує просторову обробку даних по прямій і зворотній лініях зв'язку для нена Nut потоках прийнятих символів з Nut блоків 554 направленого режиму в МІМО-системі WLAN. Для приймача і забезпечує Ns потоків відновлених сипрямої лінії зв'язку в точці 110 доступу вектор симмволів даних. Обробка процесором 560 простороволів даних sdn(k) помножується на одиничну матвої обробки RX залежить від того, вибраний нарицю І блоком 420 для одержання вектора симвоправлений або ненаправлений режим для лів передачі xdn(k) для прямої лінії зв'язку. У використання, і може бути виконана, як описано терміналі 120 користувача прийнятий вектор симвище. Процесор 570 даних RX обробляє (наприволів rdn(k) помножується на матрицю просторовоклад, встановлює зворотну відповідність, здійснює го фільтра Mut(k) блоком 460 і додатково масшта-1 зворотне переміження та декодує) Ns потоків відбується діагональною матрицею D ut(k) блоком новлених символів даних для одержання Ns пото462 для одержання вектора відновлених символів ків декодованих даних, які можуть бути подані на ˆ (k ) для прямої лінії зв'язку. Матриці даних s dn стік 572 даних для зберігання і/або в контролер -1 Mut(k) та D ut(k) виводяться на основі матриці ро580 для подальшої обробки. бочих характеристик каналу прямої лінії зв'язку Блок 578 оцінки каналу оцінює характеристику Hedn(k) і з використанням ССМІ, MMSE, SIC або каналу прямої лінії зв'язку на основі прийнятих деякого іншого способу. символів пілот-сигналу і забезпечує оцінки каналу, Для зворотної лінії зв'язку в терміналі 120 коякі можуть, включати в себе оцінки посилення каристувача вектор символів даних sup(k) помножуналу, оцінки SNR і так далі. Контролер 580 приється на одиничну матрицю І блоком 490 для одеймає оцінки каналу, виводить матриці, використані ржання вектора символів передачі xup(k) для процесором 560 просторової обробки RX і процезворотної лінії зв'язку. У точці 110 доступу прийнясором 590 просторової обробки ТХ для просторотий вектор символів rup(k) помножується на матривої обробки, і визначає відповідну швидкість для цю просторового фільтра Мар(k) блоком 440 і докожного потоку символів даних, переданого по датково масштабується діагональною матрицею прямій лінії зв'язку. Швидкості і дані зворотній лінії -1 D ap(k) блоком 442 для одержання вектора віднозв'язку обробляються процесором 588 даних ТХ, ˆ просторово обробляються (згідно з вимогами) влених символів даних s up (k ) для зворотної лінії процесором 590 просторової обробки ТХ, мульти-1 зв'язку. Матриці Мар(k) та D ap(k) виводяться на плексуються з символами пілот-сигналу, узгоджуоснові матриці робочих характеристик каналу звоються Nut блоками 554а передавача через 554ut і ротної лінії зв'язку Heup(k) і з використанням ССМІ, передаються через антени 552а через 552ut. MMSE, SIC або деякого іншого способу. У точці 110 доступу Nut переданих сигналів Фіг.5 зображає блокову діаграму точки 110 дозворотної лінії зв'язку приймаються антенами 524, ступу і термінала 120 користувача. На прямій лінії узгоджуються і демодулюються блоками 522 призв'язку, в точці 110 доступу, процесор 514 (для ймача та обробляються процесором 540 простообробки) даних передачі (ТХ) приймає дані трафірової обробки RX і процесором 542 даних RX. ка з джерела 512 даних і дані керування з контроШвидкості подаються на контролер 530 і викорислера 530. Процесор 514 даних ТХ обробляє (натовуються для керування передачею даних по приклад, кодує, переміжує і встановлює прямій лінії зв'язку. відповідність символів) кожний з Ns потоків даних Точка 110 доступу і термінал 120 користувача на основі схем кодування і модуляції, які відповіможуть виконувати подібну або різну обробку для дають швидкості, вибраній для потоку, для одерпередачі пілот-сигналу і даних зворотної лінії зв'яжання потоку символів даних. Процесор 520 просзку. торової обробки ТХ приймає з процесора 514 Контролери 530 та 580 керують дією різних даних ТХ Ns потоків символів даних, виконує проблоків обробки в точці 110 доступу і терміналі 120 сторову обробку (як потрібно) на символах даних, користувача, відповідно. Блоки 534 та 584 вибори мультиплексує в символи пілот-сигналів і подає на режимів SM вибирають відповідний режим простоNap антени Nap потоків символів передачі. Обробка рового мультиплексування для використання для процесором 520 просторової обробки ТХ залежить точки 110 доступу і термінала 120 користувача, від того, вибраний направлений або ненаправлевідповідно, на основі різних факторів, таких як 19 87973 20 описані вище. Блоки 532 та 582 пам'яті здійснюють лот-сигнали і швидкості для підтримки передачі і зберігання даних і програмних кодів, що викорисприйому даних з вибраним режимом SM. товуються контролерами 530 та 580, відповідно. Багаторежимний термінал, і точка доступу і Фіг.6 зображає блок-схему процесу 600 переспособи передачі/прийому даних, описані тут, модачі і прийому даних в МІМО-системі. Процес 600 жуть бути реалізовані різними засобами. Наприможе виконуватися терміналом користувача і точклад, вказані об'єкти і способи можуть бути реалікою доступу для передачі даних по прямій і зворозовані в апаратних засобах, програмному тній лініях зв'язку. забезпеченні або в їх комбінації. Для апаратної Спочатку вибирається режим SM з декількох реалізації блоки обробки для вказаних об'єктів і режимів SM, що підтримуються, які можуть вклюспособів можуть бути реалізовані всередині однієї чати в себе направлений і ненаправлений режими, або більшої кількості спеціалізованих інтегральних описані вище (етап 612). Вибір режиму може осносхем (CMC, ASIC), цифрових процесорів сигналів вуватися на статусі калібрування термінала, кіль(ЦПС, DSP), цифрових пристроїв обробки сигналів кості даних для передачі, SNR і/або параметрах (ЦППС, DSPD), програмованих логічних пристроїв каналу, можливості іншого об'єкта, що здійснює (ПЛП, PLD), програмованих користувачем вентизв'язок, і так далі. Вибраний режим SM також може льних матриць (ПКВМ, FPGA), процесорів, контрозмінюватися протягом сеансу передачі даних. лерів, мікроконтролерів, мікропроцесорів, інших Для передачі даних (блок 620) декілька потоків електронних блоків, розроблених для виконання даних для першої лінії зв'язку (наприклад, зворотописаних тут функцій, або їх комбінації. ної лінії зв'язку) кодуються і модулюються, відповіДля програмної реалізації описані тут способи дно до їх вибраних швидкостей, для одержання можуть бути реалізовані модулями (наприклад, декількох потоків символів даних для першої лінії процедурами, функціями і так далі), що виконують зв'язку (етап 622). Потім здійснюється просторова описані тут функції. Програмні коди можуть зберіобробка цих потоків символів даних, відповідно до гатися в блоці пам'яті (наприклад, блоках пам'яті вибраного режиму SM, для одержання декількох 532 та 582 на Фіг.5) і виконуватися процесором потоків символів передачі для передачі з декількох (наприклад, контролерами 530 та 580). Блок паантен і через першу лінію зв'язку (етап 624). Просм'яті може бути реалізований всередині процесора торова обробка передачі здійснюється з викорисабо бути зовнішнім по відношенню до процесора, танням матриці напрямних векторів для направв цьому випадку він може бути зв'язаним з процеленого режиму і одиничної матриці для сором за допомогою зв'язку через різні засоби, як ненаправленого режиму. відомо в техніці. Для прийому даних (блок 630) здійснюється Заголовки включені тут для посилання на депросторова обробка, відповідно до вибраного реякі розділи і для їх додавання в місцеположення жиму SM, декількох потоків прийнятих символів, деяких розділів. Вказані заголовки не призначені одержаних з декількох антен, для другої лінії зв'яздля обмеження контексту понять, описаних нижче, ку (наприклад, прямої лінії зв'язку), для одержання і ці поняття можуть застосовуватися в інших роздідекількох потоків відновлених символів даних лах по всьому опису. (етап 632). Просторова обробка прийому здійснюОпис розкритих варіантів здійснення, наведеється з використанням матриці власних векторів ний вище, наданий для забезпечення можливості для направленого режиму і матриці просторового будь-якому фахівцеві в даній галузі техніки зробифільтра для ненаправленого режиму. Матриця ти або використати даний винахід. Для обізнаних у просторового фільтра може бути виведена на остехніці очевидні різні модифікації вказаних варіаннові ССМІ, MMSE, SIC або деякого іншого способу. тів здійснення, і визначені тут загальні принципи Потім потоки відновлених символів даних демодуможуть бути застосовані до інших варіантів здійслюються і декодуються, відповідно до їх вибраних нення, не віддаляючись від суті і не виходячи з швидкостей, для одержання декількох потоків деконтексту винаходу. Отже, даний винахід признакодованих даних для другої лінії зв'язку (етап 634). чений для надання в широкій галузі, що узгоджуПередача даних в блоці 620 і прийом даних в ється з розкритими тут принципами і новими ознаблоці 630 можуть відбуватися одночасно або в ками, і не обмежується розкритими тут варіантами різний час. Також передаються і приймаються піздійснення. 21 87973 22 23 87973 24 25 Комп’ютерна верстка О. Гапоненко 87973 Підписне 26 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultimode terminal in a system of radio communication with multiple input, multiple output and spatial multiplexing, a method and an apparatus for data processing and access point in a radio communications system
Автори англійськоюWalton J. Rodney, Ketchum John W., Wallace Mark S., Howard Stephan J.
Назва патенту російськоюМногорежимный терминал в системе радиосвязи с многоканальным входом, многоканальным выходом и пространственным мультиплексированием, способ и устройство обработки данных и точка доступа в системе радиосвязи
Автори російськоюУолтон Дж. Родни, Кетчум Джон У., Уоллейс Марк С., Говард Стивен Дж.
МПК / Мітки
Мітки: мультиплексуванням, входом, радіозв'язку, системі, багаторежимний, обробки, даних, багатоканальним, термінал, спосіб, виходом, пристрій, доступу, точка, просторовим
Код посилання
<a href="https://ua.patents.su/13-87973-bagatorezhimnijj-terminal-v-sistemi-radiozvyazku-z-bagatokanalnim-vkhodom-bagatokanalnim-vikhodom-ta-prostorovim-multipleksuvannyam-sposib-i-pristrijj-obrobki-danikh-ta-tochka-dost.html" target="_blank" rel="follow" title="База патентів України">Багаторежимний термінал в системі радіозв’язку з багатоканальним входом, багатоканальним виходом та просторовим мультиплексуванням, спосіб і пристрій обробки даних та точка доступу в системі радіозв’язку</a>
Спосіб обробки даних при страхуванні, система для його виконання та термінал страховика, що використовується в системі
Номер патенту: 86215
Опубліковано: 10.04.2009
Автор: Свістунов Олексій Сергійович
МПК: G06Q 40/00
Мітки: даних, використовується, виконання, обробки, системі, спосіб, страховика, система, страхуванні, термінал
Формула / Реферат:
1. Спосіб обробки даних при страхуванні, що включає введення даних щодо оформлення договору страхування в термінал страховика, формування запиту про видачу договору страхування в терміналі страховика, передачу введених даних щодо оформлення договору страхування та запиту про видачу договору страхування із терміналу страховика на сервер страхової компанії за допомогою двосторонніх каналів зв'язку, аналіз внесених даних щодо оформлення договору...
Спосіб і пристрій для обробки даних для передачі в системі безпровідного зв’язку (варіанти), передавач в системі безпровідного зв’язку і пристрій безпровідного зв’язку
Номер патенту: 86927
Опубліковано: 10.06.2009
Автори: Кетчум Джон У., Уолтон Джей Р.
МПК: H04J 11/00, H04L 27/26, H04L 1/02, H04L 1/00, H04B 7/06, H04B 7/04
Мітки: передавач, системі, обробки, безпровідного, даних, передачі, варіанти, спосіб, зв'язку, пристрій
Формула / Реферат:
1. Спосіб обробки даних для передачі з пристрою безпровідного зв'язку, що містить етапи, на яких:вибирають режим передачі з рознесенням з множини режимів передачі з рознесенням, при цьому множина режимів передачі з рознесенням включає в себе режим передачі з просторово-часовим рознесенням передачі, в якому просторово-часове рознесення передачі використовується для передачі першої пари символів передачі, використовуючи першу пару антен,...
Спосіб і пристрій для вимірювання і надання інформації про характеристики передачі, а також спосіб і система вимірювання і надання інформації про стан каналу у системі зв’язку з багатоканальним входом/багатокан
Номер патенту: 72583
Опубліковано: 15.03.2005
Автори: Джалалі Ахмад, Воллес Марк, Волтон Джей Р.
МПК: H04B 17/00, H04B 7/00, H04J 11/00
Мітки: каналу, спосіб, надання, характеристики, система, стан, вимірювання, передачі, також, зв'язку, інформації, системі, пристрій, багатоканальним
Формула / Реферат:
1. Спосіб вимірювання і надання інформації про характеристики передачі у системі зв’язку з багатоканальним входом/багатоканальним виходом, який включає:- призначення першої підгрупи субканалів з сукупності субканалів першій передавальній антені з сукупності передавальних антен першого передавального вузла такої першої підгрупи субканалів групи субканалів, у якій субканали не є безперервними,- передачу першою передавальною...
Спосіб планування передачі даних по лінії космос-земля до сукупності терміналів у системі безпровідного зв’язку, сама система, базова станція, термінал та пристрій планування передачі даних до сукупності термін
Номер патенту: 74882
Опубліковано: 15.02.2006
Автори: Говард Стівен Дж., Волліс Марк, Волтон Джей Р.
МПК: H04L 1/02
Мітки: лінії, станція, зв'язку, пристрій, термінал, системі, термін, сама, базова, космос-земля, планування, сукупності, безпровідного, спосіб, передачі, даних, система, терміналів
Формула / Реферат:
1. Спосіб планування передачі даних по лінії Космос-Земля до сукупності терміналів у системі безпровідного зв'язку, який включає:формування для можливої передачі даних однієї або більше груп терміналів, кожна з яких включає комбінацію одного або більше терміналів і відповідає гіпотезі, що підлягає оцінюванню,призначення сукупності передавальних антен одному або більше терміналам у кожній групі,оцінювання якості...
Спосіб і пристрій для вибору належного сектора обслуговування в системі передачі даних множинного доступу з кодовим розділенням каналів (варіанти)
Номер патенту: 81752
Опубліковано: 11.02.2008
Автори: Блек Пітер Дж., Ву Квіанг, Аттар Рашид, Сіндхушаяна Нагабхушана, Віджаян Раджив
МПК: H04Q 7/38
Мітки: обслуговування, системі, кодовим, доступу, пристрій, передачі, множинного, спосіб, розділенням, каналів, сектора, вибору, варіанти, належного, даних
Формула / Реферат:
1. Спосіб вибору належного сектора обслуговування у системі передачі даних множинного доступу з кодовим розділенням каналів (CDMA), що включає в себе етапи, на якихпорівнюють множину рівнів сигналів, прийнятих з множини активних секторів, з рівнем сигналу поточного сектора обслуговування для одержання різниці,формують різницевий показник для кожного зі згаданої множини активних секторів за допомогою застосування гістерезису...
Попередній патент: Анаеробний ферментний реактор
Випадковий патент: Грохот для відсіву коксового дрібняка