Пристрій для екологічно чистого землеробства
Номер патенту: 47722
Опубліковано: 15.07.2002
Автори: Сакало Сергій Львович, Сердюк Михайло Ільїч, Горб Олег Олександрович, Гетя Андрій Анатолійович, Лапенко Григорій Олександрович, Суворов Олександр Володимирович, Рихва Володимир Ярославович, Карлхайнц Кьоллер, Сакало Віктор Миколайович, Сакало Лев Григорович
Формула / Реферат
1. Пристрій для екологічно чистого землеробства, що складається з хоча б одного засобу для контролю координат рослин вздовж та поперек рядка, хоча б одного відповідного блока та пульта, зв'язаного з названим хоча б одним вихідним блоком і з засобом для контролю шляху, пройденого сільськогосподарською машиною, а також основного культиватора, який відрізняється тим, що він доповнений хоча б одним засобом для регулювання місця і розміру механічного обробітку грунту навколо рослин, зв'язаного з названим хоча б одним вихідним блоком.
2. Пристрій за п.1, який відрізняється тим, що засіб для контролю координат рослин вздовж рядка виконаний в складі ємнісного датчика, виготовленого у вигляді першого і другого електродів, оточених окремими шарами діелектрика, що прикріплені до секцій струмопровідного екрана, прикріплених в свою чергу до струмопровідного кронштейна, призначеного для електричного зв'язку з машиною та регулювання установки електродів з протилежних боків об'єктів, причому перший електрод підключений до генератора електромагнітних коливань, а другий - до входу підсилювача електромагнітних коливань, охопленого ланкою від'ємного зворотного зв'язку, а вихід названого підсилювача електрично зв'язаний з вихідним блоком пристрою.
3. Пристрій за пп. 1, 2, який відрізняється тим, що в засіб контролю координат рослин вздовж рядка включена схема виділення екстремуму сигналу в складі операційного підсилювача, прямого каналу на резисторах та каналу затримки сигналу, виконаного на резисторі і конденсаторі.
4. Пристрій за пп. 1, 2, який відрізняється тим, що в засобі контролю координат рослин поперек рядка другий електрод виконаний у вигляді першої та другої секцій, механічно зв'язаних з відповідними секціями екрана, а кронштейн виконаний з можливістю встановлення та регулювання місця названих першої та другої секцій другого електрода з протилежних боків рядка рослин, причому названі секції електродів підключені до виходів першого та другого підсилювачів, виходи яких через амплітудні детектори та фільтри зв'язані зі входами перетворювачів напруги в частоту імпульсів.
5. Пристрій за пп. 1-3, який відрізняється тим, що засіб для регулювання місця та ширини механічного обробітку грунту між рослинами вздовж рядка рослин виконаний у вигляді хоча б однієї сапки та приводу, механічно зв'язаного з сапкою, а електрично - з вихідним блоком пристрою, причому в конструкцію сапки вмонтовані механізми для регулювання розміру механічного обробітку проміжків між рослинами вздовж рядка та глибини обробітку.
6. Пристрій за пп. 1, 4, який відрізняється тим, що в засіб для регулювання ширини обробітку грунту навколо рослин з боків рядка виконаний в вигляді робочого органа для механічного обробітку міжрядь, електромеханічного механізму для переміщення вказаного робочого органа поперек рядків рослин, причому названий механізм електрично зв'язаний зі схемами хоча б одного вихідного блока пристрою, зв'язаними в свою чергу з засобами для контролю координат рослин поперек рядка та блоком контролю швидкості руху машини.
7. Пристрій за пп. 1-3, 5, який відрізняється тим, що в засіб для регулювання розміру механічного обробітку грунту між рослинами в рядку вмонтований електрогідромеханічний привід, електромагніти якого електрично зв'язані з вихідним блоком, а гідроциліндр - з гідросистемою машини.
8. Пристрій за пп. 1-3, 5, який відрізняється тим, що засіб для регулювання механічного обробітку грунту між рослинами в рядку виконаний у вигляді багатоножової фрези та шагового електродвигуна, вал якого механічно зв'язаний з валом фрези, а схема управління - з вихідним блоком.
9. Пристрій по пп. 1-3, 5, який відрізняється тим, що між валом відбору потужності машини та валом багатоножової фрези змонтований електромеханічний вузол, електрично зв'язаний з вихідним блоком.
10. Пристрій за пп. 1-9, який відрізняється тим, що вихідні блоки пристрою зв'язані з шинною системою з чотирьох сигнальних проводів, з якою зв'язаний пульт в кабіні машини.
11. Пристрій за пп. 1-10, який відрізняється тим, що засіб для регулювання місця обробітку грунту з боків рядків виконаний в складі паралелограмного механізму, між рухомою рамою якого та балкою, зв'язаною з віссю тяги машини, змонтований гідроциліндр, зв'язаний з електрогідророзподільником, електрично зв'язаний з вихідним блоком та хоча б з одним засобом для контролю координат рослин поперек рядка, причому робочі органи засобів для механічного обробітку грунту навколо рослин механічно зв'язані з рухомою рамою названого паралелограмного механізму.
12. Пристрій за пп. 1-11, який відрізняється тим, що хоча б один засіб для контролю координат рослин поперек рядка змонтований на тарифній рампі паралелограмної підвіски до переднього мосту машини, а названа рамка зв'язана з рульовою трапецією, з якою зв'язані послідовно основний гідроциліндр, електрогідророзподільник та вихідний блок, з яким зв'язаний хоча б один з названих засобів для контролю координат рослин поперк рядка та хоча б один безконтактний перемикач з ручного на автоматичне керування і навпаки, змонтований біля керма, причому основний гідроциліндр вмонтований в тягу між рульовою трапецією та приводом ручного керування, з яким також шарнірно зв'язаний додатковий гідроциліндр, шарнірно зв'язаний з рамою машини та підключений до крана, з'єднаного з електроприводом, підключеним до вихідного блока, та рукояткою для переходу на ручне керування.
Текст
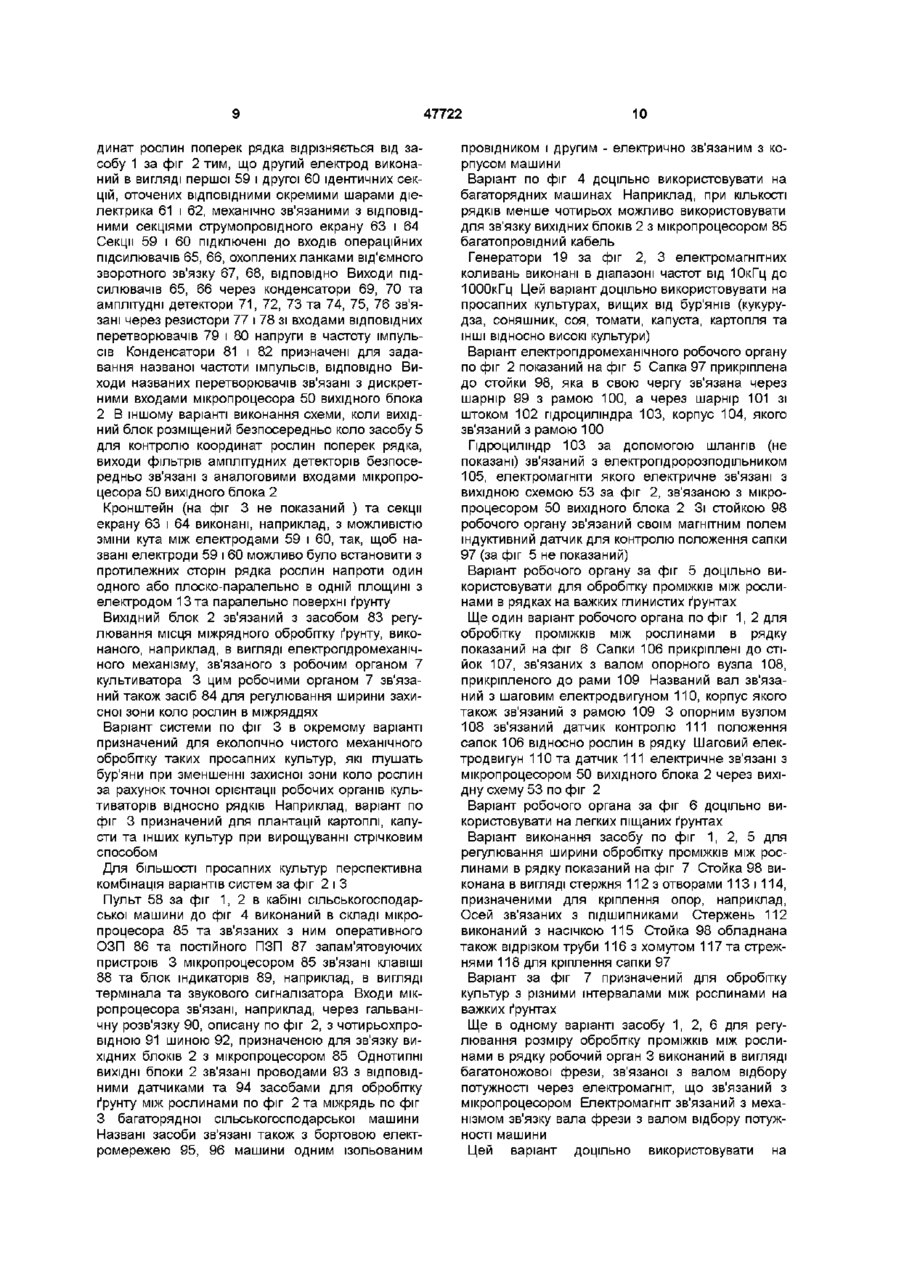
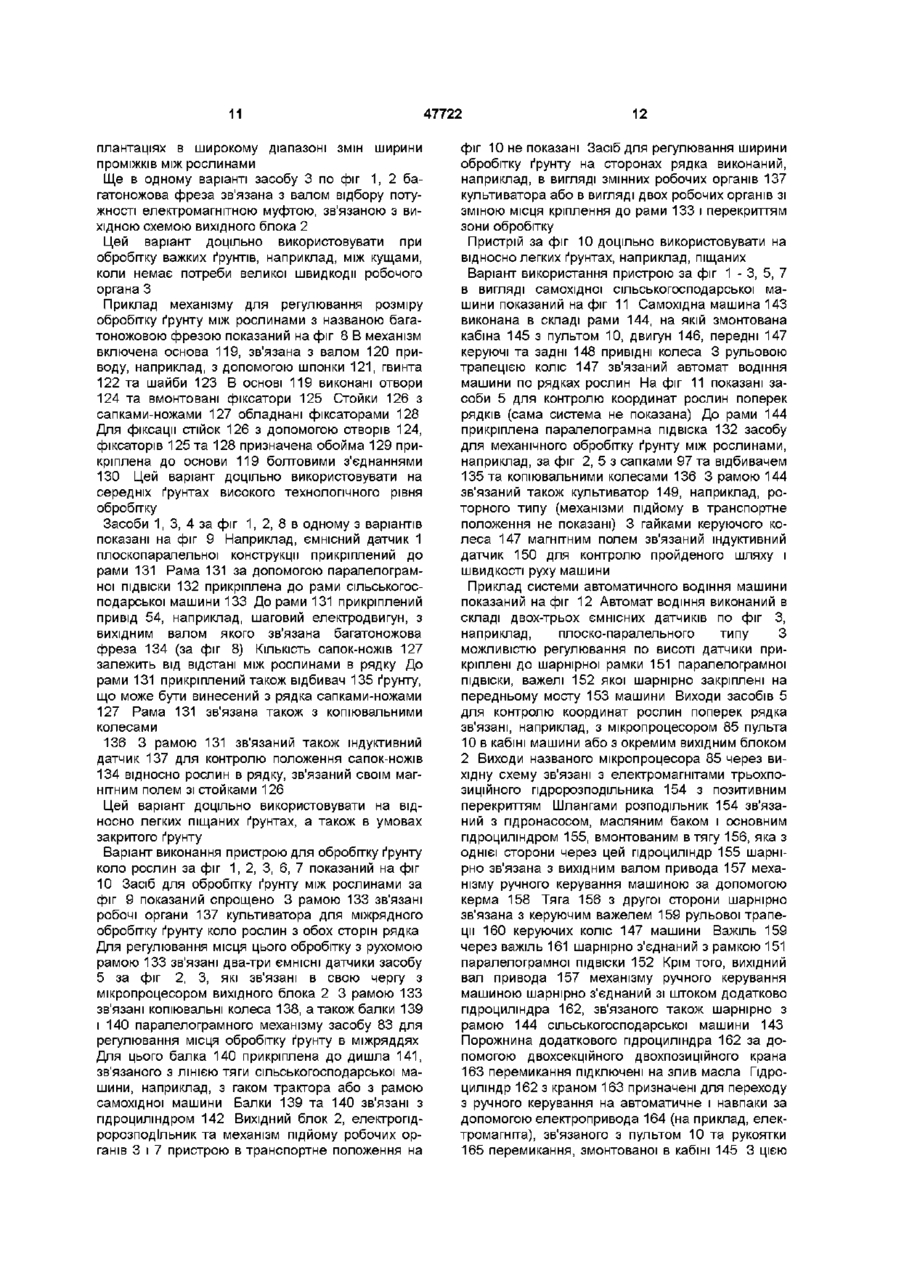
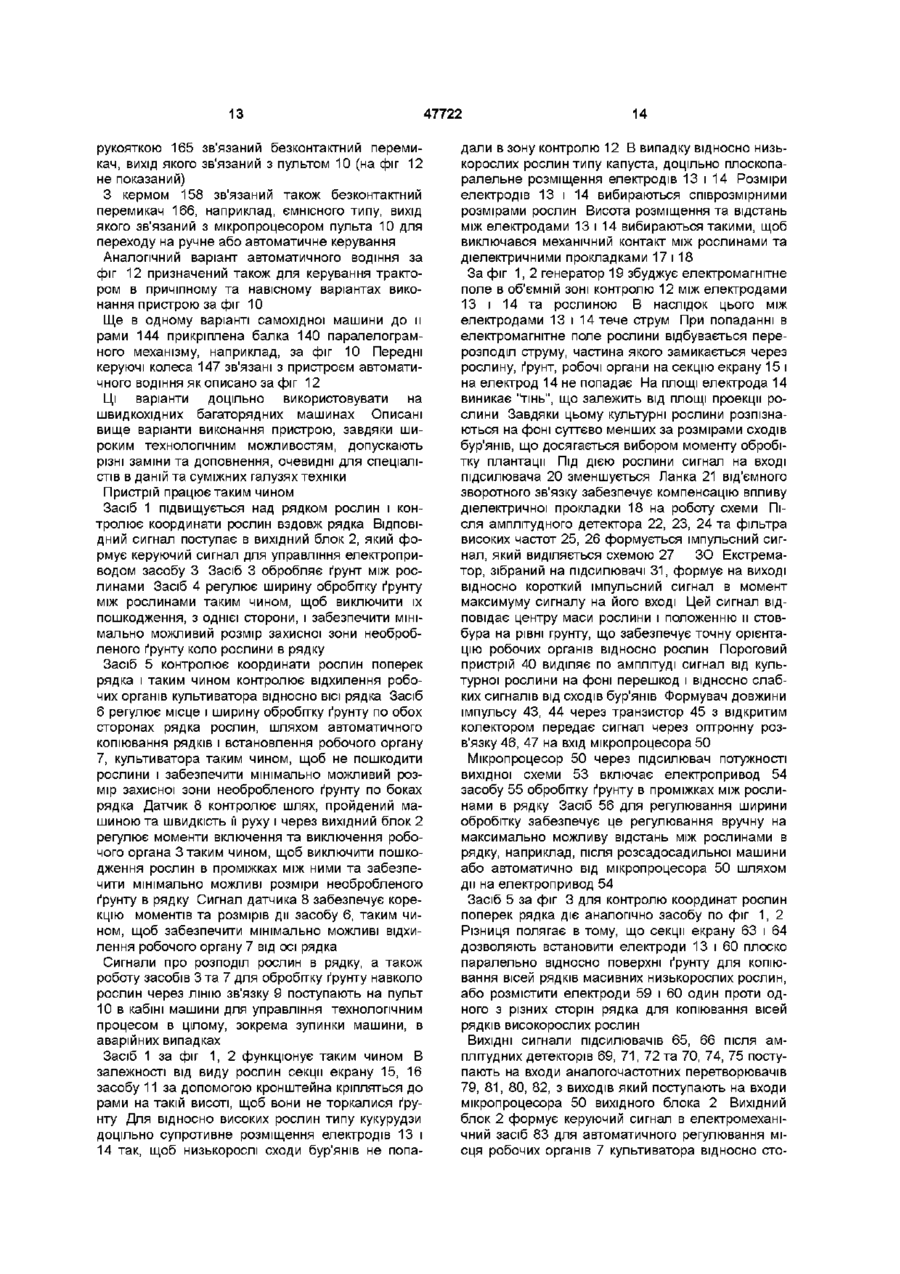
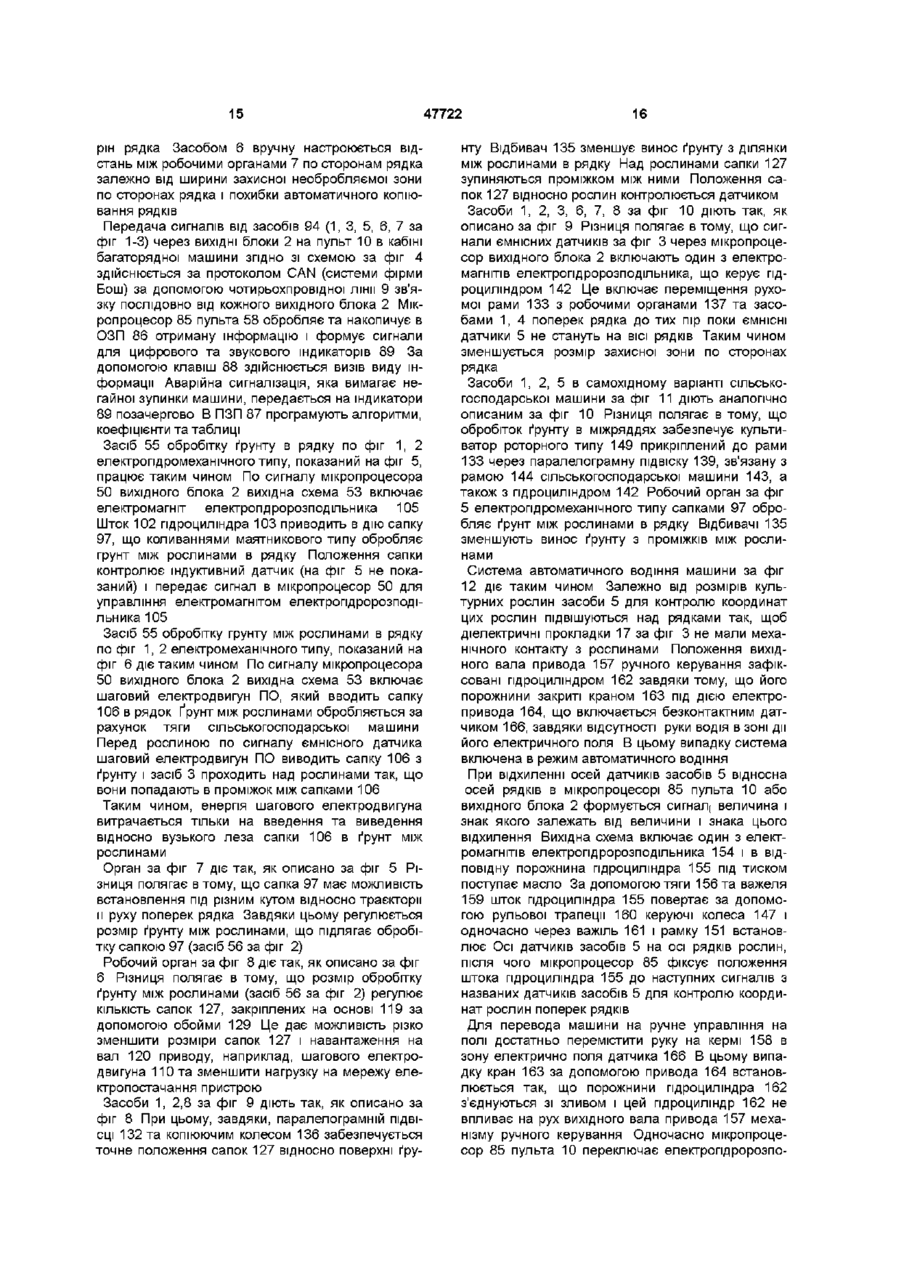
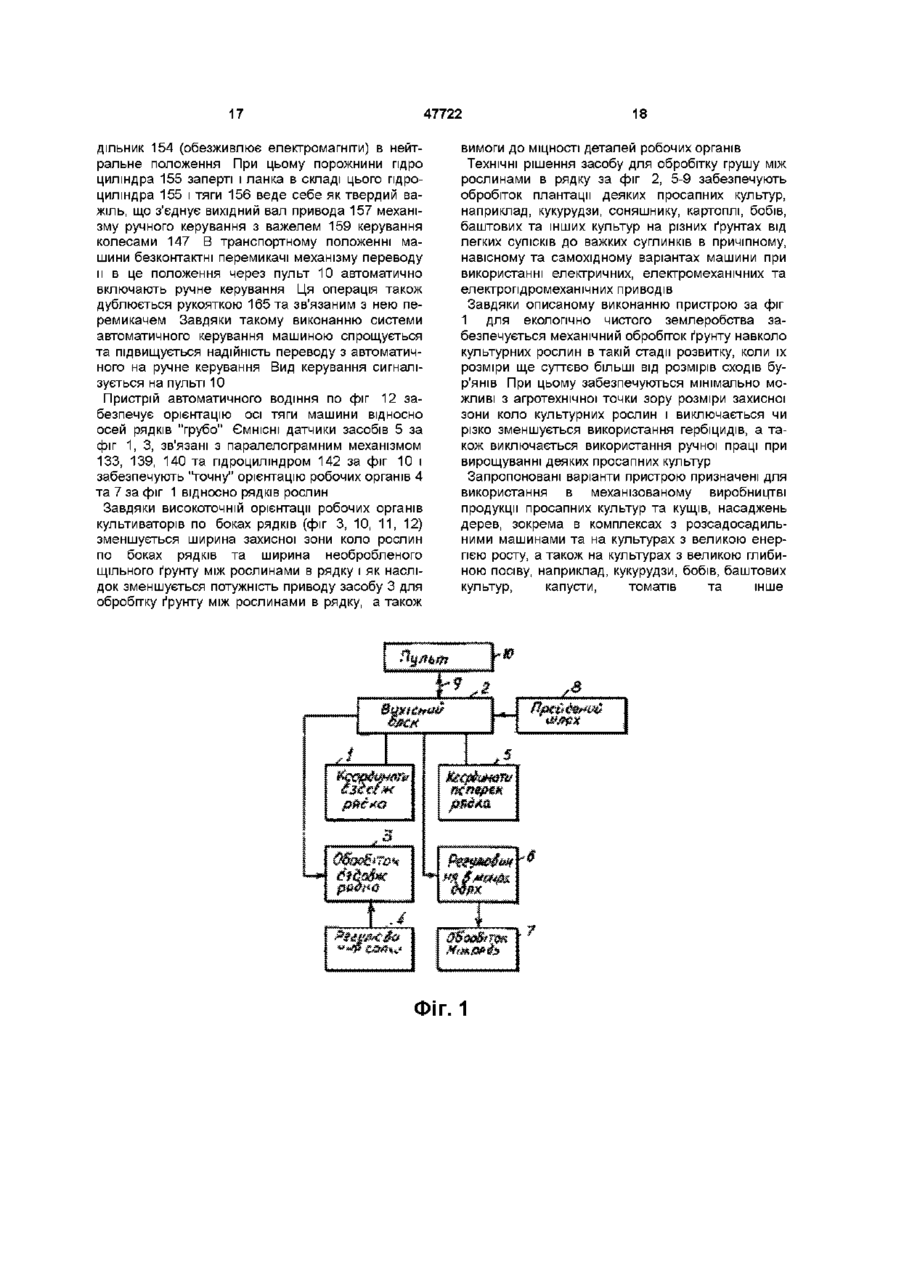
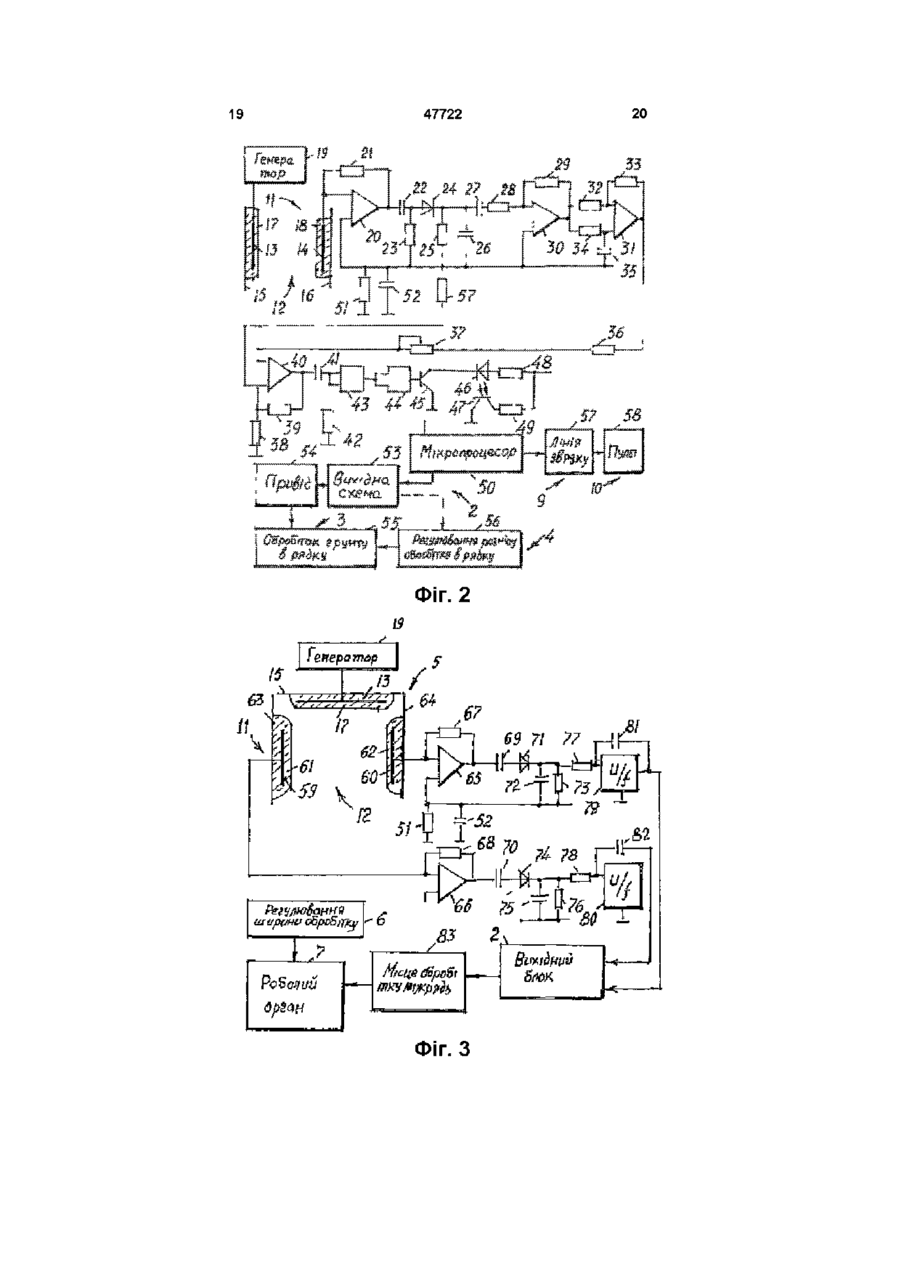
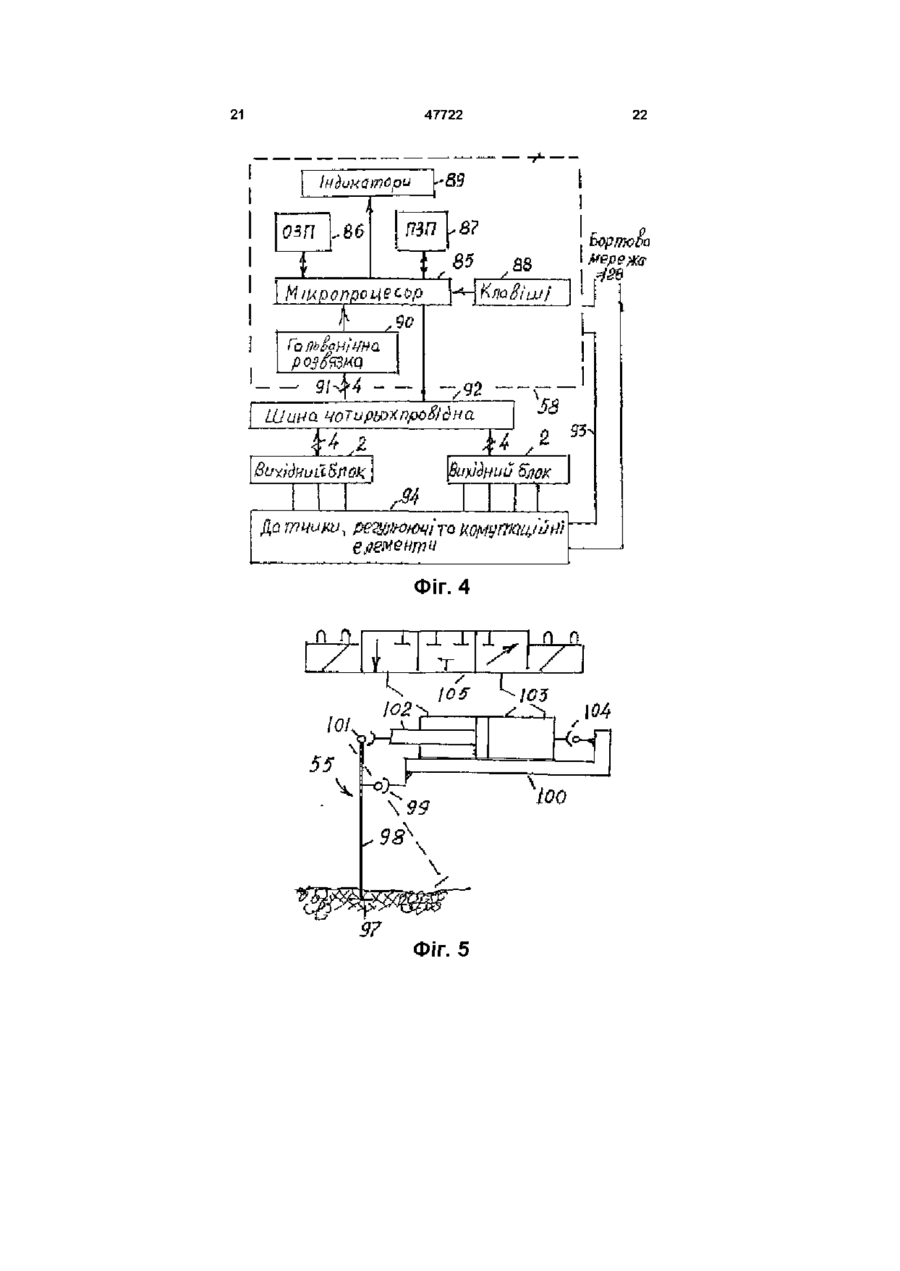
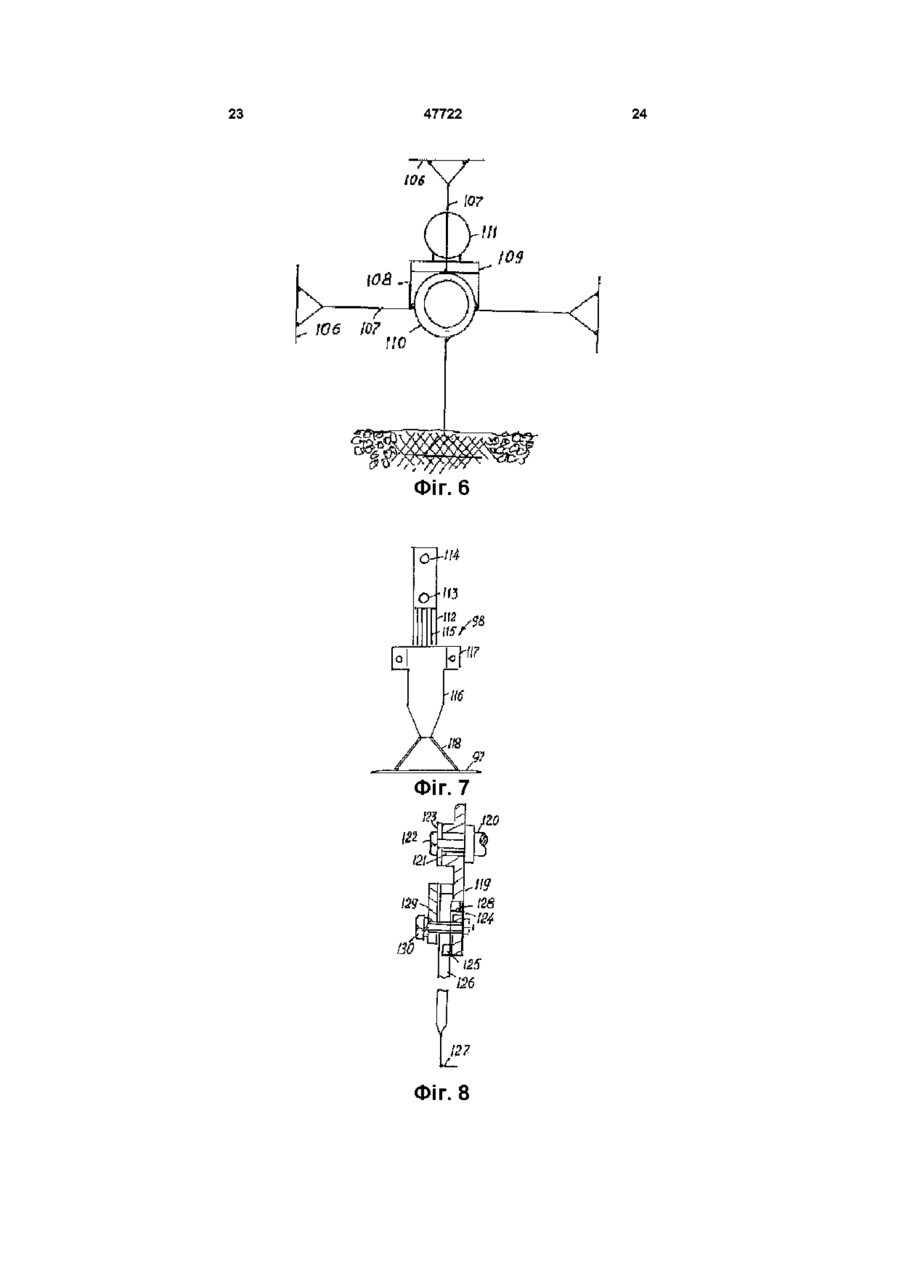
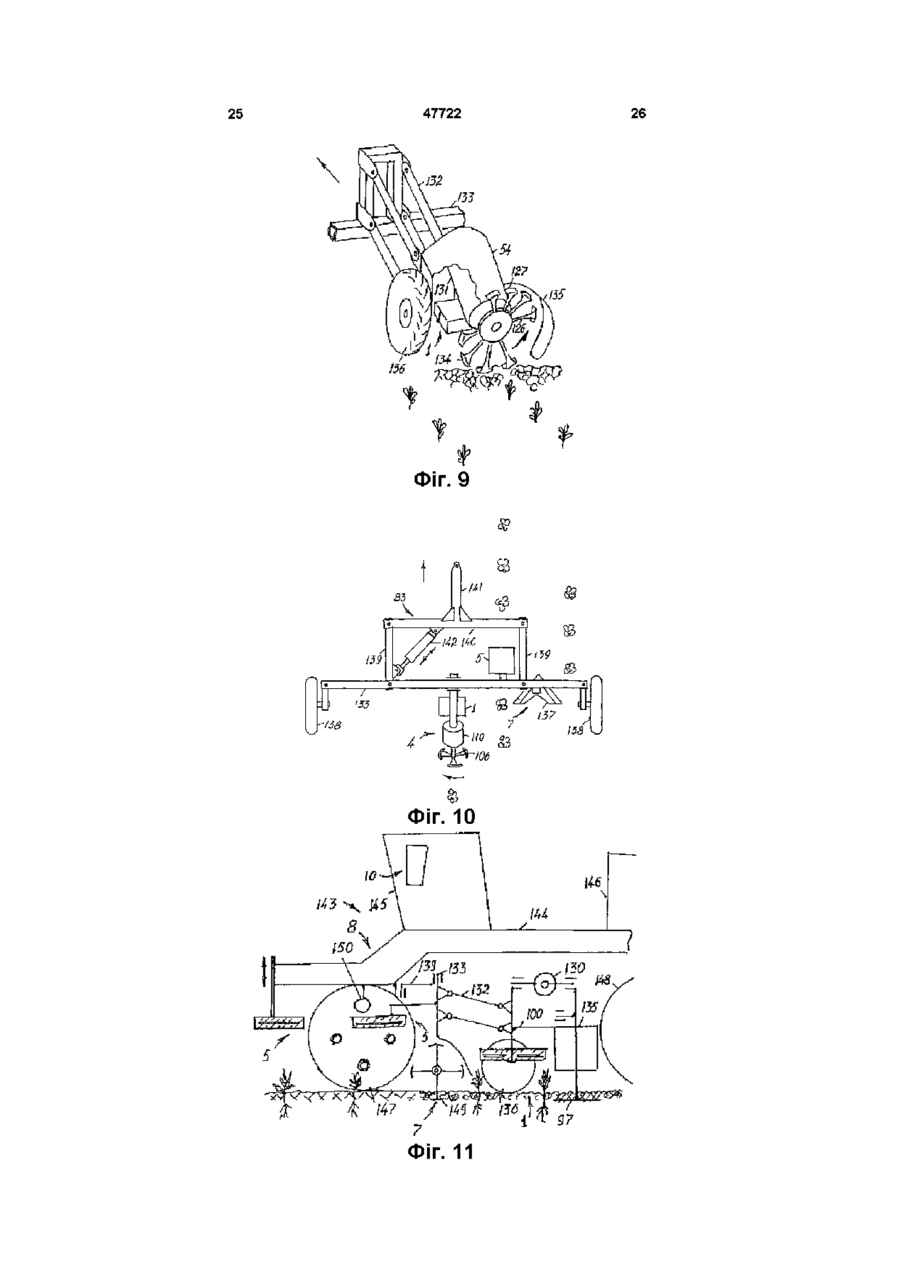
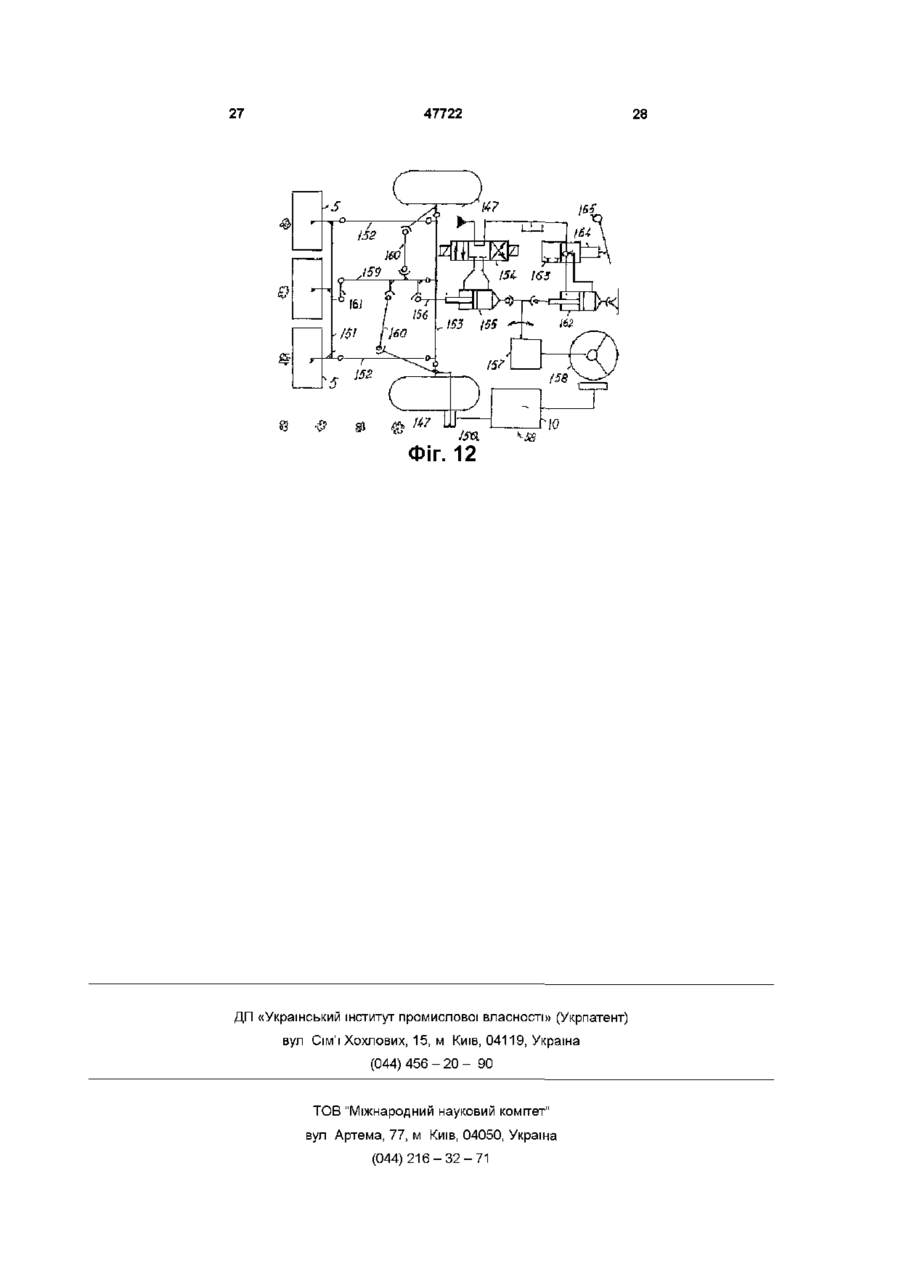
1 Пристрій для екологічно чистого землеробства, що складається з хоча б одного засобу для контролю координат рослин вздовж та поперек рядка, хоча б одного ВІДПОВІДНОГО блока та пульта, зв'язаного з названим хоча б одним вихідним блоком і з засобом для контролю шляху, пройденого сільськогосподарською машиною, а також основного культиватора, який відрізняється тим, що він доповнений хоча б одним засобом для регулювання місця і розміру механічного обробітку грунту навколо рослин, зв'язаного з названим хоча б одним вихідним блоком 2 Пристрій за п 1 , який відрізняється тим, що засіб для контролю координат рослин вздовж рядка виконаний в складі ємнісного датчика, виготовленого у вигляді першого і другого електродів, оточених окремими шарами діелектрика, що прикріплені до секцій струмопровідного екрана, прикріплених в свою чергу до струмопровідного кронштейна, призначеного для електричного зв'язку з машиною та регулювання установки електродів з протилежних боків об'єктів, причому перший електрод підключений до генератора електромагнітних коливань, а другий - до входу підсилювача електромагнітних коливань, охопленого ланкою від'ємного зворотного зв'язку, а вихід названого підсилювача електрично зв'язаний з вихідним блоком пристрою 3 Пристрій за пп 1, 2, який відрізняється тим, що в засіб контролю координат рослин вздовж рядка включена схема виділення екстремуму сигналу в складі операційного підсилювача, прямого каналу на резисторах та каналу затримки сигналу, виконаного на резисторі і конденсаторі 4 Пристрій за пп 1, 2, який відрізняється тим, що в засобі контролю координат рослин поперек рядка другий електрод виконаний у вигляді першої та другої секцій, механічно зв'язаних з ВІДПОВІДНИМИ секціями екрана, а кронштейн виконаний з можливістю встановлення та регулювання місця названих першої та другої секцій другого електрода з протилежних боків рядка рослин, причому названі секції електродів підключені до виходів першого та другого підсилювачів, виходи яких через амплітудні детектори та фільтри зв'язані зі входами перетворювачів напруги в частоту імпульсів 5 Пристрій за пп 1-3, який відрізняється тим, що засіб для регулювання місця та ширини механічного обробітку грунту між рослинами вздовж рядка рослин виконаний у вигляді хоча б однієї сапки та приводу, механічно зв'язаного з сапкою, а електрично - з вихідним блоком пристрою, причому в конструкцію сапки вмонтовані механізми для регулювання розміру механічного обробітку проміжків між рослинами вздовж рядка та глибини обробітку 6 Пристрій за пп 1, 4, який відрізняється тим, що в засіб для регулювання ширини обробітку грунту навколо рослин з боків рядка виконаний в вигляді робочого органа для механічного обробітку міжрядь, електромеханічного механізму для переміщення вказаного робочого органа поперек рядків рослин, причому названий механізм електрично зв'язаний зі схемами хоча б одного вихідного блока пристрою, зв'язаними в свою чергу з засобами для контролю координат рослин поперек рядка та блоком контролю швидкості руху машини 7 Пристрій за пп 1-3, 5, який відрізняється тим, що в засіб для регулювання розміру механічного обробітку грунту між рослинами в рядку вмонтований електропдромеханічний привід, електромагніти якого електрично зв'язані з вихідним блоком, а гідроциліндр - з гідросистемою машини 8 Пристрій за пп 1-3, 5, який відрізняється тим, що засіб для регулювання механічного обробітку грунту між рослинами в рядку виконаний у вигляді багатоножової фрези та шагового електродвигуна, вал якого механічно зв'язаний з валом фрези, а схема управління - з вихідним блоком 9 Пристрій по пп 1-3, 5, який відрізняється тим, що між валом відбору потужності машини та валом багатоножової фрези змонтований електромеханічний вузол, електрично зв'язаний з 47722 вихідним блоком 10 Пристрій за пп 1-9, який відрізняється тим, що ВИХІДНІ блоки пристрою зв'язані з шинною системою з чотирьох сигнальних проводів, з якою зв'язаний пульт в кабіні машини 11 Пристрій за пп 1-10, який відрізняється тим, що засіб для регулювання місця обробітку грунту з боків рядків виконаний в складі паралелограмного механізму, між рухомою рамою якого та балкою, зв'язаною з віссю тяги машини, змонтований гідроциліндр, зв'язаний з електропдророзподільником, електрично зв'язаний з вихідним блоком та хоча б з одним засобом для контролю координат рослин поперек рядка, причому робочі органи засобів для механічного обробітку грунту навколо рослин механічно зв'язані з рухомою рамою названого паралелограмного механізму 12 Пристрій за пп 1-11, який відрізняється тим, що хоча б один засіб для контролю координат рослин поперек рядка змонтований на тарифній рампі паралелограмної ПІДВІСКИ ДО переднього мосту машини, а названа рамка зв'язана з рульовою трапецією, з якою зв'язані послідовно основний гідроциліндр, електропдророзподільник та вихідний блок, з яким зв'язаний хоча б один з названих засобів для контролю координат рослин поперк рядка та хоча б один безконтактний перемикач з ручного на автоматичне керування і навпаки, змонтований біля керма, причому основний гідроциліндр вмонтований в тягу між рульовою трапецією та приводом ручного керування, з яким також шарнірно зв'язаний додатковий гідроциліндр, шарнірно зв'язаний з рамою машини та підключений до крана, з'єднаного з електроприводом, підключеним до вихідного блока, та рукояткою для переходу на ручне керування Винахід відноситься до сільського господарства, зокрема до пристроїв для точного механічного обробітку ґрунту навколо рослин, а більш точно стосується пристроїв для обробітку просапних культур, розміри яких в момент обробітку суттєво більші від сходів бур'янів, в тому числі після посадки розсадосадильними машинами ВІДОМІ пристрої для екологічно чистого землеробства, виконані в складі засобів для контролю координат рослин вздовж та поперек рядків, ВІДПОВІДНИХ ВИХІДНИХ блоків, зв'язаних з виходами названих засобів та пульта, зв'язаного з засобами для контролю шляху, пройденому сільськогосподарською машиною та з названими вихідними блоками, а також основного культиватора (Патент України на "Пристрій для контролю характеристик сільськогосподарських матеріалів" № 3057, М Кп А 01 В 69/04, Бюл 5 - 1 , 26 12 94) Недолік пристрою полягає в відсутності засобів для автоматизованого механічного обробітку ґрунту навколо рослин з мінімально допустимими розмірами захисної зони коло рослин просапних культур В основу винаходу поставлено задачу створити пристрій для екологічно чистого землеробства шляхом доповнення засобами для регулювання місця та ширини механічного обробітку грунту навколо рослин і використати його для автоматизації обробітку ґрунту на плантаціях просапних культур, виключити ручну працю на цих операціях та використання гербіцидів і цим самим зменшити хімічне забруднення навколишнього середовища в процесах виробництва сільськогосподарської продукції Це досягається тим, що пристрій для екологічно чистого землеробства, виконаний в складі хоча б одного засобу для контролю координат рослин вздовж та поперек рядка, хоча б одного ВІДПОВІДНОГО ВИХІДНОГО блока та пульта, зв'язаного з названим хоча б одним вихідним блоком і з засобом для контролю шляху, пройденому сільського сподарською машиною, а також основного культиватора, згідно з винаходом доповнений хоча б одним засобом для регулювання місця і розміру механічного обробітку ґрунту навколо рослин, зв'язаного з названим хоча б одним вихідним блоком Таке виконання пристрою дозволяє виключити ручну працю на операціях механічного обробітку ґрунту та використання гербіцидів Суттєво, що засіб для контролю координат рослин вздовж рядка виконаний в складі ємнісного датчика, виготовленого в вигляді першого і другого електродів, оточених окремими шарами діелектрика, що прикріплені до секцій струмопровідного екрану, прикріплених в свою чергу до струмопровідного кронштейна, призначеного для електричного зв'язку з машиною та регулювання установки електродів з протилежних сторін об'єктів, причому перший електрод підключений до генератора електромагнітних коливань, а другий — до входу підсилювача електромагнітних коливань, охопленого ланкою від'ємного зворотнього зв'язку, а вихід названого підсилювача електрично зв'язаний з вихідним блоком пристрою Таке виконання пристрою дає можливість шляхом регулювання установки ємнісного датчика відносно рослин забезпечити надійне розпізнавання культурних рослин на фоні ґрунту та сходів бур'янів, розміри яких суттєво менші в момент обробітку від розмірів культурних рослин Важливо, що в засіб контролю координат рослин вздовж рядка включена схема виділення екстремуму сигнала в складі операційного підсилювача, прямого каналу на резисторах та каналу затримки сигналу, виконаного на резисторі і конденсаторі Таке виконання пристрою дає можливість підвищити точність контролю координат рослин вздовж рядка і зменшити розмір відповідної захисної зони коло рослин Суттєво, що в засобі контролю координат рослин поперек рядка другий електрод виконаний у 47722 вигляді першої та другої секцій та механічно звязаних з ВІДПОВІДНИМИ секціями екрану, а кронштейн виконаний з можливістю встановлення та регулювання місця названих першої та другої секцій другого електрода з протилежних сторін рядка рослин, причому названі секції електродів підключені до виходів першого та другого підсилювачів, виходи яких через амплітудні детектори та фільтри зв'язані зі входами перетворювачів напруги в частоту імпульсів Таке доповнення пристрою дає можливість орієнтувати робочі органи відносно осей рядків, зменшити розміри захисної зони по сторонах рядків, а також ширину необробленого щільного ґрунту між рослинами в рядку, що суттєво зменшує вимоги до засобів обробітку ґрунту між ними Важливо, що засіб для регулювання місця та ширини механічного обробітку ґрунту між рослинами вздовж рядка рослин, виконаний у вигляді хоча б однієї сапки та привода, механічно зв'язаного з сапкою, а електрично - з вихідним блоком пристрою, причому в конструкцію сапки вмонтовані механізми для регулювання розміру механічного обробітку проміжків між рослинами вздовж рядка та глибини обробітку Таке виконання пристрою забезпечує автоматичний механічний обробіток ґрунту між рослинами вздовж рядка без використання ручної праці на операції обробітку проміжків між рослинами вздовж рядка та гербіцидів Важливо також, що засіб для регулювання ширини обробітку ґрунту коло рослин по сторонах рядка виконаний в вигляді робочого органу для механічного обробітку міжрядь, електромеханічного механізму для переміщення вказаного робочого органу поперек рядків рослин, причому названий механізм електрично зв'язаний зі схемами хоча б одного вихідного блока пристрою, зв'язаними в свою чергу з засобами для контролю координат рослин поперек рядка та блоком контролю швидкості руху машини Це виконання пристрою забезпечує мінімально можливу з агротехнічної точки зору ширину захисної зони коло рослин в міжряддях, що виключає необхідність використання на операції обробітку ґрунту коло рослин в міжряддях ручної праці та гербіцидів Доцільно, ЩО В засіб для регулювання ширини механічного обробітку ґрунту між рослинами в рядку вмонтований електропдромеханічний привід, електромагніти якого електрично зв'язані з вихідним блоком, а гідроциліндр - з гідросистемою машини Таке виконання пристрою забезпечує автоматичний механічний обробіток ґрунту між рослинами вздовж рядка, в тому числі на важких глинистих ґрунтах, а також без попереднього механічного обробітку міжрядь Доцільно також, що засіб для регулювання механічного обробітку ґрунту між рослинами в рядку виконаний у вигляді багатоножової фрези та шагового електродвигуна, вал якого механічно зв'язаний з валом фрези, а схема управління — з вихідним блоком Це виконання пристрою забезпечує високоточний обробіток ґрунту між рослинами в рядку в умовах легких та піщаних ґрунтів Доцільно також, що між валом відбору потужності машини та валом багатоножової фрези змонтований електромеханічний вузол, електрично зв'язаний з вихідним блоком Це дає можливість обробляти ґрунт між рослинами в рядках на важких глинистих та середніх ґрунтах, а також при великій КІЛЬКОСТІ СХОДІВ бур'янів Доцільно також, що ВИХІДНІ блоки пристрою зв'язані з шинною системою з чотирьох сигнальних проводів, з якою зв'язаний пульт в кабіні машини Це зменшує КІЛЬКІСТЬ проводів і підвищує надійність пристрою Важливо, що засіб для регулювання місця обробітку ґрунту по сторонах рядків виконаний в складі паралелограмного механізму, між рухомою рамою якого та балкою зв'язаною з віссю тяги машини змонтований гідроциліндр, зв'язаний з електропдророзподільником, електрично зв'язаним з вихідним блоком та хоча б одним засобом для контролю координат рослин поперек рядка, причому робочі органи засобів для механічного обробітку ґрунту навколо рослин механічно зв'язані з рухомою рамою названого паралелограмного механізму Це забезпечує орієнтацію робочих органів відносно сей рядків і зменшення розмірів захисної зони коло рослин по «боках рядків Крім того важливо, що хоча б один засіб для контролю координат рослин поперек рядка змонтований на шарнірній рамці паралелограмної ПІДВІСКИ до переднього мосту машини, а названа рамка зв'язана з рульовою трапецією, з якою зв'язані послідовно основний гідроциліндр, електропдророзподільник та вихідний блок, з яким зв'язаний хоча б один з названих засобів для контролю координат рослин поперек рядка та хоча б один безконтактний перемикач з ручного на автоматичне керування і навпаки, змонтований коло керма, причому основний гідроциліндр вмонтований в тягу між рульовою трапецією та приводом ручного керування, з яким також шарнірно зв'язаний додатковий гідроциліндр, шарнірно зв'язаний з рамою машини та підключений до крану, з'єднаного з електроприводом, підключеним до вихідного блока та рукояткою для переходу на ручне керування Цей варіант дає можливість підвищити точність орієнтації робочих органів культиватора, зменшити розмір захисної зони навколо рослин по сторонах рядка, а також ширину необробленого щільного ґрунту між рослинами в рядку, а також потужність та МІЦНІСТЬ засобу для обробітку ґрунту між рослинами Така комбінація схемних та конструктивних рішень дозволяє зменшити розміри захисної зони навколо рослин в процесі механізованого обробітку ґрунту, виключити ручну працю на цій операції та використання гербіцидів при вирощуванні деяких просапних культур На фіг 1 показана принципова схема пристрою для автоматизованого механічного обробггку ґрунту навколо рослин просапних культур, на фіг 2 - принципова схема засобу для контролю 47722 координат рослин вздовж рядка для просапних культур, розміри яких суттєво більші від розмірів бур'янів в момент обробітку, на фіг 3 — принципова схема засобу для контролю координат рослин поперек рядка просапних культур, розміри яких суттєво більші від розмірів бур'янів в момент обробітку, на фіг 4 - принципова схема пульта в кабіні машини з чотирьохпровідною схемою зв'язку з вихідними блоками, на фіг 5 - варіант електропдромеханічного робочого органу для обробітку ґрунту між рослинами в рядку, на фіг 6 - варіант виконання робочого органа для обробітку ґрунту між рослинами в рядку, на фіг 7 - варіант виконання сапки по фіг 6, на фіг 8 - варіант робочого органу для обробітку ґрунту між рослинами в рядку, на фіг 9 - варіант пристрою з багатоножовою фрезою, на фіг 10 - варіант пристрою з копіюванням осей рядків, на фіг 11 - варіант самохідної машини для обробітку ґрунту коло рослин, 12 автомат водіння самохідної машини або трактора Пристрій для екологічно чистого землеробства буде описаний на прикладі його використання для автоматизованого механічного обробітку ґрунту навколо рослин просапних культур Згідно винаходу (фіг 1) в пристрій включений засіб 1 для контролю координат рослин вздовж кожного рядка (відстані між рослинами в рядку), зв'язаний через вихідний блок 2 з робочим органом 3 для обробітку ґрунту між рослинами в рядку Засіб 3 оснащений засобом 4 для регулювання розміру обробітку ґрунту в рядку Крім того, в пристрій включений засіб 5 для контролю координат рослин поперек рядка (відхилення робочих органів від осі рядка), зв'язаний через вихідний блок з засобом 6 для регулювання місця та ширини обробітку міжрядь, який в свою чергу зв'язаний з робочим органом 7 для обробітку ґрунту Вихідний блок 2 через ЛІНІЮ зв'язку 9 зв'язаний з пультом 10, призначеним для монтажу в кабіні сільськогосподарської машини 3 пультом 10 зв'язаний датчик 8 шляху, пройденого машиною Засіб 1 контролю координат рослин вздовж рядка, виконаний по схемі (фіг 2) ємнісного датчика для контролю координат рослин вздовж рядків, виконаного в складі засобів 11 формування зони 12 контролю Засіб 11 формування зони 12 контролю, виконаний в складі першого 13 та другого 14 електродів, секцій 15 і 16 струмопровідного екрана ВІДПОВІДНО Секції 15 та 16 прикріплені до струмопровідного кронштейна призначеного для кріплення на машину та регулювання установки електродів 13, 14 відносно рослин в рядку (на фіг 1 не показано) Кожен з електродів 13 і 14 оточений окремим шаром діелектрика 17 та 18, ВІДПОВІДНО Секції 15 і 16 екрану та кронштейн призначені також для електричного зв'язку датчика з корпусом сільськогосподарської машини Екран виконаний з можливостями протилежного за фіг 2 та плоскопаралельного розміщення електродів 13 та 14 Електрод 13 електрично зв'язаний з виходом генератора 19 електромагнітних коливань, зібраного на логічних елементах, резисторах та конденсаторі Електрод 14 підключений до 7 входу операційного підсилювача 20 Цей вхід зв'язаний з виходом підсилювача 20 ланкою від'ємного зворо тнього звязку, виконаною, наприклад, на резисторі 21, з виходом підсилювача 20 зв'язаний фільтр, виконаний на конденсаторі 22 і резисторі 23 і призначений для пропускання сигналів високої частоти генератора 19 3 виходом названого фільтра зв'язаний амплітудний детектор, зібраний на ДІОДІ 24, резисторі 25 та конденсаторі 26 Вихід амплітудного детектора зв'язаний зі схемою виділення та формування імпульсного сигналу від рослини Ця схема зібрана на конденсаторі 27, резисторах 28 та 29, та операційному підсилювачі ЗО З виходом підсилювача ЗО зв'язана схема виділення екстремуму сигнала, зібрана на операційному підсилювачі 31 Прямий канал цієї схеми зібраний на резисторах 32 і 33, а канал затримки сигналу, виконаний на резисторі 34 і конденсаторі 35 Вихід схеми виділення екстремуму зв'язаний зі входом порогового пристрою, зібраного на резисторах 36, 37, 38 і 39, та операційному підсилювачі 40 Вихід порогового пристрою, в свою чергу, з'єднаний зі входом формувача імпульсів, зібраного на конденсаторі 4 1 , резисторі 42 та двух логічних елементах І-НІ 43 та 44 Вихід формувача виконаний на транзисторі 45 з відкритим колектором, зв'язаним зі схемою оптронної гальванічної розв'язки, зібраної на СВІТОДІОДІ 46, транзисторі 47 та резисторах 48 і 49 Вихід транзистора 47 зв'язаний зі входом мікропроцесора 50 вихідного блока 2 Резистор 51 призначений для живлення середніх точок операційних підсилювачів, а конденсатор 52 служить фільтром Крім мікропроцесора 50 в вихідний блок 2 включені також, наприклад, оперативний запам'ятовуючий пристрій та постійний програмувальний запам'ятовуючий пристрій (на схемі не показані) Вихід мікропроцесора 50 зв'язаний, наприклад, з вихідною схемою 53, виконаною, наприклад, в вигляді підсилювача потужності Вихід схеми 53 зв'язаний з приводом 54 електромеханічного або електропдромеханічного типу Привід 54 механічно зв'язаний з засобом 55 для обробітку ґрунту між рослинами в рядку Цей засіб 55 виконаний в вигляді сапки та зв'язаний з засобом 56 для, наприклад, ручного регулювання ширини механічного обробітку ґрунту між рослинами в рядку В іншому варіанті виконання засіб 56 оснащений електромеханічним засобом регулювання ширини механічного обробітку ґрунту між рослинами залежно від відстані між ними В цьому варіанті вхід засобу 56 регулювання ширини обробітку ґрунту зв'язаний з мікропроцесором 50 через вихідну схему 53 Мікропроцесор 50 вихідного блока 2 через ЛІНІЮ зв'язку 57 зв'язаний з пультом 58 в кабіні сільськогосподарської машини Варіант системи за фіг 1 і 2 доцільно використовувати як окрему операцію для обробітку ґрунту між рослинами просапних культур картоплі, кукурудзи, соняшника, розсади, висадженої розсадосадильною машиною в випадку, коли комплексний обробіток ґрунту навколо рослин в рядку і міжрядь одночасно недоцільний Варіант засобу 5 по фіг 3 для контролю коор 47722 динат рослин поперек рядка відрізняється від засобу 1 за фіг 2 тим, що другий електрод виконаний в вигляді першої 59 і другої 60 ідентичних секцій, оточених ВІДПОВІДНИМИ окремими шарами діелектрика 61 і 62, механічно зв'язаними з ВІДПОВІДНИМИ секціями струмопровідного екрану 63 і 64 Секції 59 і 60 підключені до входів операційних підсилювачів 65, 66, охоплених ланками від'ємного зворотного зв'язку 67, 68, ВІДПОВІДНО ВИХОДИ під силювачів 65, 66 через конденсатори 69, 70 та амплітудні детектори 71, 72, 73 та 74, 75, 76 зв'язані через резистори 77 і 78 зі входами ВІДПОВІДНИХ перетворювачів 79 і 80 напруги в частоту імпульсів Конденсатори 81 і 82 призначені для задавання названої частоти імпульсів, ВІДПОВІДНО ВИХОДИ названих перетворювачів зв'язані з дискретними входами мікропроцесора 50 вихідного блока 2 В іншому варіанті виконання схеми, коли вихідний блок розміщений безпосередньо коло засобу 5 для контролю координат рослин поперек рядка, виходи фільтрів амплітудних детекторів безпосередньо зв'язані з аналоговими входами мікропроцесора 50 вихідного блока 2 Кронштейн (на фіг 3 не показаний ) та секції екрану 63 і 64 виконані, наприклад, з можливістю зміни кута між електродами 59 і 60, так, щоб названі електроди 59 і 60 можливо було встановити з протилежних сторін рядка рослин напроти один одного або плоско-паралельно в одній площині з електродом 13 та паралельно поверхні ґрунту Вихідний блок 2 зв'язаний з засобом 83 регулювання місця міжрядного обробітку ґрунту, виконаного, наприклад, в вигляді електропдромеханічного механізму, зв'язаного з робочим органом 7 культиватора 3 цим робочими органом 7 зв'язаний також засіб 84 для регулювання ширини захисної зони коло рослин в міжряддях Варіант системи по фіг 3 в окремому варіанті призначений для екологічно чистого механічного обробітку таких просапних культур, які глушать бур'яни при зменшенні захисної зони коло рослин за рахунок точної орієнтації робочих органів культиваторів відносно рядків Наприклад, варіант по фіг 3 призначений для плантацій картоплі, капусти та інших культур при вирощуванні стрічковим способом Для більшості просапних культур перспективна комбінація варіантів систем за фіг 2 і З Пульт 58 за фіг 1, 2 в кабіні сільськогосподарської машини до фіг 4 виконаний в складі мікропроцесора 85 та зв'язаних з ним оперативного ОЗП 86 та постійного ПЗП 87 запам'ятовуючих пристроїв 3 мікропроцесором 85 зв'язані клавіші 88 та блок індикаторів 89, наприклад, в вигляді термінала та звукового сигналізатора Входи мікропроцесора зв'язані, наприклад, через гальванічну розв'язку 90, описану по фіг 2, з чотирьохпровідною 91 шиною 92, призначеною для зв'язку вихідних блоків 2 з мікропроцесором 85 Однотипні ВИХІДНІ блоки 2 зв'язані проводами 93 з ВІДПОВІДНИМИ датчиками та 94 засобами для обробітку ґрунту між рослинами по фіг 2 та міжрядь по фіг 3 багаторядної сільськогосподарської машини Названі засоби зв'язані також з бортовою електромережею 95, 96 машини одним ізольованим 10 провідником і другим - електрично звязаним з корпусом машини Варіант по фіг 4 доцільно використовувати на багаторядних машинах Наприклад, при КІЛЬКОСТІ рядків менше чотирьох можливо використовувати для зв'язку вихідних блоків 2 з мікропроцесором 85 багатопровідний кабель Генератори 19 за фіг 2, 3 електромагнітних коливань виконані в діапазоні частот від ЮкГц до ЮООкГц Цей варіант доцільно використовувати на просапних культурах, вищих від бур'янів (кукурудза, соняшник, соя, томати, капуста, картопля та ІНШІ відносно високі культури) Варіант електропдромеханічного робочого органу по фіг 2 показаний на фіг 5 Сапка 97 прикріплена до стойки 98, яка в свою чергу зв'язана через шарнір 99 з рамою 100, а через шарнір 101 зі штоком 102 гідроциліндра 103, корпус 104, якого зв'язаний з рамою 100 Гідроциліндр 103 за допомогою шлангів (не показані) зв'язаний з електропдророзподільником 105, електромагніти якого електричне зв'язані з вихідною схемою 53 за фіг 2, зв'язаною з мікропроцесором 50 вихідного блока 2 Зі стойкою 98 робочого органу зв'язаний своїм магнітним полем індуктивний датчик для контролю положення сапки 97 (за фіг 5 не показаний) Варіант робочого органу за фіг 5 доцільно використовувати для обробітку проміжків між рослинами в рядках на важких глинистих ґрунтах Ще один варіант робочого органа по фіг 1, 2 для обробітку проміжків між рослинами в рядку показаний на фіг 6 Сапки 106 прикріплені до стійок 107, зв'язаних з валом опорного вузла 108, прикріпленого до рами 109 Названий вал зв'язаний з шаговим електродвигуном 110, корпус якого також зв'язаний з рамою 109 3 опорним вузлом 108 зв'язаний датчик контролю 111 положення сапок 106 відносно рослин в рядку Шаговий електродвигун 110 та датчик 111 електричне зв'язані з мікропроцесором 50 вихідного блока 2 через вихідну схему 53 по фіг 2 Варіант робочого органа за фіг 6 доцільно використовувати на легких піщаних ґрунтах Варіант виконання засобу по фіг 1, 2, 5 для регулювання ширини обробітку проміжків між рослинами в рядку показаний на фіг 7 Стойка 98 виконана в вигляді стержня 112 з отворами 113 і 114, призначеними для кріплення опор, наприклад, Осей зв'язаних з підшипниками Стержень 112 виконаний з насічкою 115 Стойка 98 обладнана також відрізком труби 116 з хомутом 117 та стрежнями 118 для кріплення сапки 97 Варіант за фіг 7 призначений для обробітку культур з різними інтервалами між рослинами на важких ґрунтах Ще в одному варіанті засобу 1, 2, 6 для регулювання розміру обробітку проміжків між рослинами в рядку робочий орган 3 виконаний в вигляді багатоножової фрези, зв'язаної з валом відбору потужності через електромагніт, що зв'язаний з мікропроцесором Електромагніт зв'язаний з механізмом зв'язку вала фрези з валом відбору потужності машини Цей варіант доцільно використовувати на 11 47722 плантаціях в широкому діапазоні змін ширини проміжків між рослинами Ще в одному варіанті засобу 3 по фіг 1, 2 багатоножова фреза зв'язана з валом відбору потужності електромагнітною муфтою, зв'язаною з вихідною схемою вихідного блока 2 Цей варіант доцільно використовувати при обробітку важких ґрунтів, наприклад, між кущами, коли немає потреби великої швидкодії робочого органа З Приклад механізму для регулювання розміру обробітку ґрунту між рослинами з названою багатоножовою фрезою показаний на фіг 8 В механізм включена основа 119, зв'язана з валом 120 приводу, наприклад, з допомогою шпонки 121, гвинта 122 та шайби 123 В основі 119 виконані отвори 124 та вмонтовані фіксатори 125 Стойки 126 з сапками-ножами 127 обладнані фіксаторами 128 Для фіксації стійок 126 з допомогою отворів 124, фіксаторів 125 та 128 призначена обойма 129 прикріплена до основи 119 болтовими з'єднаннями 13О Цей варіант доцільно використовувати на середніх ґрунтах високого технологічного рівня обробітку Засоби 1, 3, 4 за фіг 1, 2, 8 в одному з варіантів показані на фіг 9 Наприклад, ємнісний датчик 1 плоско паралельно і конструкції прикріплений до рами 131 Рама 131 за допомогою паралелограмноі ПІДВІСКИ 132 прикріплена до рами сільськогосподарської машини 133 До рами 131 прикріплений привід 54, наприклад, шаговий електродвигун, з вихідним валом якого зв'язана багатоножова фреза 134 (за фіг 8) КІЛЬКІСТЬ сапок-ножів 127 залежить від відстані між рослинами в рядку До рами 131 прикріплений також відбивач 135 ґрунту, що може бути винесений з рядка сапками-ножами 127 Рама 131 зв'язана також з копіювальними колесами 136 3 рамою 131 зв'язаний також індуктивний датчик 137 для контролю положення сапок-ножів 134 відносно рослин в рядку, зв'язаний своїм магнітним полем зі стойками 126 Цей варіант доцільно використовувати на відносно легких піщаних ґрунтах, а також в умовах закритого ґрунту Варіант виконання пристрою для обробітку ґрунту коло рослин за фіг 1, 2, 3, 6, 7 показаний на фіг 10 Засіб для обробітку ґрунту між рослинами за фіг 9 показаний спрощено 3 рамою 133 зв'язані робочі органи 137 культиватора для міжрядного обробітку ґрунту коло рослин з обох сторін рядка Для регулювання місця цього обробітку з рухомою рамою 133 зв'язані два-три ЄМНІСНІ датчики засобу 5 за фіг 2, 3, які зв'язані в свою чергу з мікропроцесором вихідного блока 2 3 рамою 133 зв'язані копіювальні колеса 138, а також балки 139 і 140 паралелограмного механізму засобу 83 для регулювання місця обробітку ґрунту в міжряддях Для цього балка 140 прикріплена до дишла 141, зв'язаного з ЛІНІЄЮ ТЯГИ сільськогосподарської ма шини, наприклад, з гаком трактора або з рамою самохідної машини Балки 139 та 140 зв'язані з гідроциліндром 142 Вихідний блок 2, електропдророзподільник та механізм підйому робочих органів 3 і 7 пристрою в транспортне положення на 12 фіг 10 не показані Засіб для регулювання ширини обробітку ґрунту на сторонах рядка виконаний, наприклад, в вигляді змінних робочих органів 137 культиватора або в вигляді двох робочих органів зі зміною місця кріплення до рами 133 і перекриттям зони обробітку Пристрій за фіг 10 доцільно використовувати на відносно легких ґрунтах, наприклад, піщаних Варіант використання пристрою за фіг 1 - 3, 5, 7 в вигляді самохідної сільськогосподарської машини показаний на фіг 11 Самохідна машина 143 виконана в складі рами 144, на якій змонтована кабіна 145 з пультом 10, двигун 146, передні 147 керуючі та задні 148 привідні колеса 3 рульовою трапецією коліс 147 зв'язаний автомат водіння машини по рядках рослин На фіг 11 показані засоби 5 для контролю координат рослин поперек рядків (сама система не показана) До рами 144 прикріплена паралелограмна підвіска 132 засобу для механічного обробітку ґрунту між рослинами, наприклад, за фіг 2, 5 з сапками 97 та відбивачем 135 та копіювальними колесами 136 3 рамою 144 зв'язаний також культиватор 149, наприклад, роторного типу (механізми підйому в транспортне положення не показані) 3 гайками керуючого колеса 147 магнітним полем зв'язаний індуктивний датчик 150 для контролю пройденого шляху і швидкості руху машини Приклад системи автоматичного водіння машини показаний на фіг 12 Автомат водіння виконаний в складі двох-трьох ємнісних датчиків по фіг З, наприклад, плоско-паралельного типу З можливістю регулювання по висоті датчики прикріплені до шарнірної рамки 151 паралелограмної ПІДВІСКИ, важелі 152 якої шарнірно закріплені на передньому мосту 153 машини Виходи засобів 5 для контролю координат рослин поперек рядка зв'язані, наприклад, з мікропроцесором 85 пульта 10 в кабіні машини або з окремим вихідним блоком 2 Виходи названого мікропроцесора 85 через вихідну схему зв'язані з електромагнітами трьохпозиційного пдророзподільника 154 з позитивним перекриттям Шлангами розподільник 154 зв'язаний з гідронасосом, масляним баком і основним гідроциліндром 155, вмонтованим в тягу 156, яка з однієї сторони через цей гідроциліндр 155 шарнірно зв'язана з вихідним валом привода 157 механізму ручного керування машиною за допомогою керма 158 Тяга 156 з другої сторони шарнірно зв'язана з керуючим важелем 159 рульової трапеції 160 керуючих коліс 147 машини Важіль 159 через важіль 161 шарнірно з'єднаний з рамкою 151 паралелограмної ПІДВІСКИ 152 Крім того, вихідний вал привода 157 механізму ручного керування машиною шарнірно з'єднаний зі штоком додатково гідроциліндра 162, зв'язаного також шарнірно з рамою 144 сільськогосподарської машини 143 Порожнина додаткового гідроциліндра 162 за допомогою двохсекційного двохпозиційного крана 163 перемикання підключені на злив масла Гідроциліндр 162 з краном 163 призначені для переходу 3 ручного керування на автоматичне і навпаки за допомогою електропривода 164 (на приклад, електромагніта), зв'язаного з пультом 10 та рукоятки 165 перемикання, змонтованої в кабіні 145 3 цією 13 рукояткою 165 зв'язаний безконтактний перемикач, вихід якого зв'язаний з пультом 10 (на фіг 12 не показаний) З кермом 158 зв'язаний також безконтактний перемикач 166, наприклад, ємнісного типу, вихід якого зв'язаний з мікропроцесором пульта 10 для переходу на ручне або автоматичне керування Аналогічний варіант автоматичного водіння за фіг 12 призначений також для керування трактором в причіпному та навісному варіантах виконання пристрою за фіг 10 Ще в одному варіанті самохідної машини до и рами 144 прикріплена балка 140 паралелограмного механізму, наприклад, за фіг 10 Передні керуючі колеса 147 зв'язані з пристроєм автоматичного водіння як описано за фіг 12 Ці варіанти доцільно використовувати на швидкохідних багаторядних машинах Описані вище варіанти виконання пристрою, завдяки широким технологічним можливостям, допускають різні заміни та доповнення, очевидні для спеціалістів в даній та суміжних галузях техніки Пристрій працює таким чином Засіб 1 підвищується над рядком рослин і контролює координати рослин вздовж рядка ВІДПОВІДНИЙ сигнал поступає в вихідний блок 2, який формує керуючий сигнал для управління електроприводом засобу 3 Засіб 3 обробляє ґрунт між рослинами Засіб 4 регулює ширину обробітку ґрунту між рослинами таким чином, щоб виключити їх пошкодження, з однієї сторони, і забезпечити мінімально можливий розмір захисної зони необробленого ґрунту коло рослини в рядку Засіб 5 контролює координати рослин поперек рядка і таким чином контролює відхилення робочих органів культиватора відносно ВІСІ рядка Засіб 6 регулює місце і ширину обробітку ґрунту по обох сторонах рядка рослин, шляхом автоматичного копіювання рядків і встановлення робочого органу 7, культиватора таким чином, щоб не пошкодити рослини і забезпечити мінімально можливий розмір захисної зони необробленого ґрунту по боках рядка Датчик 8 контролює шлях, пройдений машиною та швидкість її руху і через вихідний блок 2 регулює моменти включення та виключення робочого органа 3 таким чином, щоб виключити пошкодження рослин в проміжках між ними та забезпечити мінімально можливі розміри необробленого ґрунту в рядку Сигнал датчика 8 забезпечує корекцію моментів та розмірів дії засобу 6, таким чином, щоб забезпечити мінімально можливі відхилення робочого органу 7 від осі рядка Сигнали про розподіл рослин в рядку, а також роботу засобів 3 та 7 для обробітку ґрунту навколо рослин через ЛІНІЮ зв'язку 9 поступають на пульт 10 в кабіні машини для управління технологічним процесом в цілому, зокрема зупинки машини, в аварійних випадках Засіб 1 за фіг 1, 2 функціонує таким чином В залежності від виду рослин секції екрану 15, 16 засобу 11 за допомогою кронштейна кріпляться до рами на такій висоті, щоб вони не торкалися ґрунту Для відносно високих рослин типу кукурудзи доцільно супротивне розміщення електродів 13 і 14 так, щоб низькорослі сходи бур'янів не попа 47722 14 дали в зону контролю 12 В випадку відносно низькорослих рослин типу капуста, доцільно плоскопаралельне розміщення електродів ІЗ і 14 Розміри електродів 13 і 14 вибираються співрозмірними розмірами рослин Висота розміщення та відстань між електродами 13 і 14 вибираються такими, щоб виключався механічний контакт між рослинами та діелектричними прокладками 17 і 18 За фіг 1, 2 генератор 19 збуджує електромагнітне поле в об'ємній зоні контролю 12 між електродами 13 і 14 та рослиною В наслідок цього між електродами 13 і 14 тече струм При попаданні в електромагнітне поле рослини відбувається перерозподіл струму, частина якого замикається через рослину, ґрунт, робочі органи на секцію екрану 15 і на електрод 14 не попадає На площі електрода 14 виникає "тінь", ЩО залежить від площі проекції рослини Завдяки цьому культурні рослини розпізнаються на фоні суттєво менших за розмірами сходів бур'янів, що досягається вибором моменту обробітку плантації Під дією рослини сигнал на вході підсилювача 20 зменшується Ланка 21 від'ємного зворотного зв'язку забезпечує компенсацію впливу діелектричної прокладки 18 на роботу схеми Після амплітудного детектора 22, 23, 24 та фільтра високих частот 25, 26 формується імпульсний сигнал, який виділяється схемою 27 ЗО Екстрематор, зібраний на підсилювачі 31, формує на виході відносно короткий імпульсний сигнал в момент максимуму сигналу на його вході Цей сигнал відповідає центру маси рослини і положенню и стовбура на рівні грунту, що забезпечує точну орієнтацію робочих органів відносно рослин Пороговий пристрій 40 виділяє по амплітуді сигнал від культурної рослини на фоні перешкод і відносно слабких сигналів від сходів бур'янів Формувач довжини імпульсу 43, 44 через транзистор 45 з відкритим колектором передає сигнал через оптронну розв'язку 46, 47 на вхід мікропроцесора 50 Мікропроцесор 50 через підсилювач потужності вихідної схеми 53 включає електропривод 54 засобу 55 обробітку ґрунту в проміжках між рослинами в рядку Засіб 56 для регулювання ширини обробітку забезпечує це регулювання вручну на максимально можливу відстань між рослинами в рядку, наприклад, після розсадосадильної машини або автоматично від мікропроцесора 50 шляхом дії на електропривод 54 Засіб 5 за фіг 3 для контролю координат рослин поперек рядка діє аналогічно засобу по фіг 1, 2 Різниця полягає в тому, що секції екрану 63 і 64 дозволяють встановити електроди 13 і 60 плоско паралельно відносно поверхні ґрунту для копіювання вісей рядків масивних низькорослих рослин, або розмістити електроди 59 і 60 один проти одного з різних сторін рядка для копіювання вісей рядків високорослих рослин ВИХІДНІ сигнали підсилювачів 65, 66 після амплітудних детекторів 69, 71, 72 та 70, 74, 75 поступають на входи аналогочастотних перетворювачів 79, 81, 80, 82, з виходів який поступають на входи мікропроцесора 50 вихідного блока 2 Вихідний блок 2 формує керуючий сигнал в електромеханічний засіб 83 для автоматичного регулювання місця робочих органів 7 культиватора відносно сто 15 рін рядка Засобом 6 вручну настроюється відстань між робочими органами 7 по сторонам рядка залежно від ширини захисної необробляємої зони по сторонах рядка і похибки автоматичного копіювання рядків Передача сигналів від засобів 94 (1, 3, 5, 6, 7 за фіг 1-3) через ВИХІДНІ блоки 2 на пульт 10 в кабіні багаторядної машини згідно зі схемою за фіг 4 здійснюється за протоколом CAN (системи фірми Бош) за допомогою чотирьохпровідної лінії 9 зв'язку послідовно від кожного вихідного блока 2 Мікропроцесор 85 пульта 58 обробляє та накопичує в ОЗП 86 отриману інформацію і формує сигнали для цифрового та звукового індикаторів 89 За допомогою клавіш 88 здійснюється визів виду інформації Аварійна сигналізація, яка вимагає негайної зупинки машини, передається на індикатори 89 позачергово В ПЗП 87 програмують алгоритми, коефіцієнти та таблиці Засіб 55 обробітку ґрунту в рядку по фіг 1, 2 електропдромеханічного типу, показаний на фіг 5, працює таким чином По сигналу мікропроцесора 50 вихідного блока 2 вихідна схема 53 включає електромагніт електропдророзподільника 105 Шток 102 гідроциліндра 103 приводить в дію сапку 97, що коливаннями маятникового типу обробляє грунт між рослинами в рядку Положення сапки контролює індуктивний датчик (на фіг 5 не показаний) і передає сигнал в мікропроцесор 50 для управління електромагнітом електропдророзподільника 105 Засіб 55 обробітку грунту між рослинами в рядку по фіг 1, 2 електромеханічного типу, показаний на фіг 6 діє таким чином По сигналу мікропроцесора 50 вихідного блока 2 вихідна схема 53 включає шаговий електродвигун ПО, який вводить сапку 106 в рядок Ґрунт між рослинами обробляється за рахунок тяги сільськогосподарської машини Перед рослиною по сигналу ємнісного датчика шаговий електродвигун ПО виводить сапку 106 з ґрунту і засіб 3 проходить над рослинами так, що вони попадають в проміжок між сапками 106 Таким чином, енергія шагового електродвигуна витрачається тільки на введення та виведення відносно вузького леза сапки 106 в ґрунт між рослинами Орган за фіг 7 діє так, як описано за фіг 5 Різниця полягає в тому, що сапка 97 має можливість встановлення під різним кутом відносно траєкторії и руху поперек рядка Завдяки цьому регулюється розмір ґрунту між рослинами, що підлягає обробітку сапкою 97 (засіб 56 за фіг 2) Робочий орган за фіг 8 діє так, як описано за фіг 6 Різниця полягає в тому, що розмір обробітку ґрунту між рослинами (засіб 56 за фіг 2) регулює КІЛЬКІСТЬ сапок 127, закріплених на основі 119 за допомогою обойми 129 Це дає можливість різко зменшити розміри сапок 127 і навантаження на вал 120 приводу, наприклад, шагового електродвигуна 110 та зменшити нагрузку на мережу електропостачання пристрою Засоби 1, 2,8 за фіг 9 діють так, як описано за фіг 8 При цьому, завдяки, паралелограмній ПІДВІСЦІ 132 та копіюючим колесом 136 забезпечується точне положення сапок 127 відносно поверхні ґру 47722 16 нту Відбивач 135 зменшує винос ґрунту з ділянки між рослинами в рядку Над рослинами сапки 127зупиняються проміжком між ними Положення сапок 127 відносно рослин контролюється датчиком Засоби 1, 2, 3, 6, 7, 8 за фіг 10 діють так, як описано за фіг 9 Різниця полягає в тому, що сигнали ємнісних датчиків за фіг 3 через мікропроцесор вихідного блока 2 включають один з електромагнітів електропдророзподільника, що керує гідроциліндром 142 Це включає переміщення рухомої рами 133 з робочими органами 137 та засобами 1, 4 поперек рядка до тих пір поки ЄМНІСНІ датчики 5 не стануть на ВІСІ рядків Таким чином зменшується розмір захисної зони по сторонах рядка Засоби 1, 2, 5 в самохідному варіанті сільськогосподарської машини за фіг 11 діють аналогічно описаним за фіг 10 Різниця полягає в тому, що обробіток ґрунту в міжряддях забезпечує культиватор роторного типу 149 прикріплений до рами 133 через паралелограмну підвіску 139, зв'язану з рамою 144 сільськогосподарської машини 143, а також з гідроциліндром 142 Робочий орган за фіг 5 електропдромеханічного типу сапками 97 обробляє ґрунт між рослинами в рядку Відбивачі 135 зменшують винос ґрунту з проміжків між рослинами Система автоматичного водіння машини за фіг 12 діє таким чином Залежно від розмірів культурних рослин засоби 5 для контролю координат цих рослин підвішуються над рядками так, щоб діелектричні прокладки 17 за фіг 3 не мали механічного контакту з рослинами Положення вихідного вала привода 157 ручного керування зафіксовані гідроциліндром 162 завдяки тому, що його порожнини закриті краном 163 під дією електропривода 164, що включається безконтактним датчиком 166, завдяки відсутності руки водія в зоні дії його електричного поля В цьому випадку система включена в режим автоматичного водіння При відхиленні осей датчиків засобів 5 відносна осей рядків в мікропроцесорі 85 пульта 10 або вихідного блока 2 формується сигналі величина і знак якого залежать від величини і знака цього відхилення Вихідна схема включає один з електромагнітів електропдророзподільника 154 і в відповідну порожнина гідроциліндра 155 під тиском поступає масло За допомогою тяги 156 та важеля 159 шток гідроциліндра 155 повертає за допомогою рульової трапеції 160 керуючі колеса 147 і одночасно через важіль 161 і рамку 151 встановлює Осі датчиків засобів 5 на осі рядків рослин, після чого мікропроцесор 85 фіксує положення штока гідроциліндра 155 до наступних сигналів з названих датчиків засобів 5 для контролю координат рослин поперек рядків Для перевода машини на ручне управління на полі достатньо перемістити руку на кермі 158 в зону електрично поля датчика 166 В цьому випадку кран 163 за допомогою привода 164 встановлюється так, що порожнини гідроциліндра 162 з'єднуються зі зливом і цей гідроциліндр 162 не впливає на рух вихідного вала привода 157 механізму ручного керування Одночасно мікропроцесор 85 пульта 10 переключає електропдророзпо 47722 17 дільник 154 (обезживлює електромагніти) в нейтральне положення При цьому порожнини гідро циліндра 155 заперті і ланка в складі цього гідроциліндра 155 і тяги 156 веде себе як твердий важіль, що з'єднує вихідний вал привода 157 механізму ручного керування з важелем 159 керування колесами 147 В транспортному положенні машини безконтактні перемикачі механізму переводу и в це положення через пульт 10 автоматично включають ручне керування Ця операція також дублюється рукояткою 165 та зв'язаним з нею перемикачем Завдяки такому виконанню системи автоматичного керування машиною спрощується та підвищується надійність переводу з автоматичного на ручне керування Вид керування сигналізується на пульті 10 Пристрій автоматичного водіння по фіг 12 забезпечує орієнтацію осі тяги машини відносно осей рядків "грубо" ЄМНІСНІ датчики засобів 5 за фіг 1, 3, зв'язані з паралелограмним механізмом 133, 139, 140 та гідроциліндром 142 за фіг 10 і забезпечують "точну" орієнтацію робочих органів 4 та 7 за фіг 1 відносно рядків рослин Завдяки високоточній орієнтації робочих органів культиваторів по боках рядків (фіг 3, 10, 11, 12) зменшується ширина захисної зони коло рослин по боках рядків та ширина необробленого щільного ґрунту між рослинами в рядку і як наслідок зменшується потужність приводу засобу 3 для обробітку ґрунту між рослинами в рядку, а також 18 вимоги до МІЦНОСТІ деталей робочих органів Технічні рішення засобу для обробітку грушу між рослинами в рядку за фіг 2, 5-9 забезпечують обробіток плантації деяких просапних культур, наприклад, кукурудзи, соняшнику, картоплі, бобів, баштових та інших культур на різних ґрунтах від легких супісків до важких суглинків в причіпному, навісному та самохідному варіантах машини при використанні електричних, електромеханічних та електропдромеханічних приводів Завдяки описаному виконанню пристрою за фіг 1 для екологічно чистого землеробства забезпечується механічний обробіток ґрунту навколо культурних рослин в такій стадії розвитку, коли їх розміри ще суттєво більші від розмірів сходів бур'янів При цьому забезпечуються мінімально можливі з агротехнічної точки зору розміри захисної зони коло культурних рослин і виключається чи різко зменшується використання гербіцидів, а також виключається використання ручної праці при вирощуванні деяких просапних культур Запропоновані варіанти пристрою призначені для використання в механізованому виробництві продукції просапних культур та кущів, насаджень дерев, зокрема в комплексах з розсадосадильними машинами та на культурах з великою енергією росту, а також на культурах з великою глибиною посіву, наприклад, кукурудзи, бобів, баштових культур, капусти, томатів та інше ФІГ. 1 19 47722 Фіг. 2 ФІГ. З 20 21 47722 22 •89 ,8? 86 Бортора 65 L ШиНй чоторузхпроВідна 4_2 LA м SfiQK Фіг. 4 П f) Фіг. 5 23 47722 ФІГ. 6 Фіг. 7 24 25 47722 Фіг. 10 26 27 47722 Фіг. 12 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 28
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for environmentally friendly agriculture
Автори англійськоюSakalo Lev Hryhorovych, Sakalo Viktor Mykolaiovych, Lapenko Hryhorii Oleksandrovych, Rykhva Volodymyr Yaroslavovych, Hetia Andrii Anatoliiovych
Назва патенту російськоюУстройство для экологически чистого земледелия
Автори російськоюСакало Лев Григорьевич, Сакало Виктор Николаевич, Лапенко Григорий Александрович, Рыхва Владимир Ярославович, Гетя Андрей Анатольевич
МПК / Мітки
МПК: A01D 75/00, A01B 41/00, A01B 69/04
Мітки: чистого, землеробства, пристрій, екологічної
Код посилання
<a href="https://ua.patents.su/14-47722-pristrijj-dlya-ekologichno-chistogo-zemlerobstva.html" target="_blank" rel="follow" title="База патентів України">Пристрій для екологічно чистого землеробства</a>
Висівна система сівалки для точного землеробства
Номер патенту: 29525
Опубліковано: 15.11.2000
Автори: Бернхаррдт Герд, Войтюк Дмитро Григорович, Ямков Олександр Володимирович, Гаврилюк Григорій Романович, Аніскевич Леонід Володимирович
МПК: A01C 7/08
Мітки: сівалки, система, висівна, точного, землеробства
Текст:
...з пристрою для зчитування інформації з магнітного носія з електронною картою сівби – дисковода 22, приймача сигналів глобальної систе ми позиціонування (ГСП) 23, процесора П 24, модулятора М 25, генераторів імпульсів 26: Г 1 - пе ретворювача обертального руху опорного колеса 27 сівалки в імпульсні сигнали і Г 2 - перетворювача електронної карти сівби в імпульсні сигнали; керованого суматора 28, багатоканального підсилювача AM 29. Всі...
Спосіб обробітку грунту і посіву насіння просапних культур та пристрій для його здійснення
Номер патенту: 24422
Опубліковано: 17.07.1998
Автори: Іванько Іван Павлович, Сало Лариса Віталіївна, Шмат Сергій Іванович, Шило Валерія Сергіївна, Дунаєвський Олег Васильович
МПК: A01B 49/04
Мітки: спосіб, здійснення, просапних, культур, насіння, обробітку, пристрій, грунту, посіву
Формула / Реферат:
1. Спосіб обробітку грунту і посіву насіння просапних культур, який включає передпосівний обробіток грунту щілинорізами, який відрізняється тим, що посів насіння проводять у зоні завчасно пророблених на глибину 35 - 45см щілин.2. Пристрій для здійснення способу обробітку грунту і посіву за п.1, який включає робочий орган - щілиноріз, який відрізняється тим, що на рамі сівалки перед посівними секціями встановлюють щілинорізи з відстанню...
Спосіб вирощування екологічно чистої продукції
Номер патенту: 45557
Опубліковано: 15.04.2002
Автори: Антонець Семен Свиридович, Шикула Микола Кіндратович
МПК: A01B 79/02, A01C 21/00
Мітки: чистої, екологічної, вирощування, продукції, спосіб
Формула / Реферат:
Спосіб вирощування екологічно чистої продукції, який включає обробіток грунту без обертання скиби, мульчування грунту післяжнивними рештками, внесення органічних добрив, який відрізняється тим, що на полі залишають нетоварну частку врожаю, переведення нетоварної частки врожаю у напівперепрілий гній здійснюють за коефіцієнтами 5 - для сухої частини і 1,5 для гички і сидеральних культур, компенсують азотну недостатність внесенням 8-10 кг діючої...
Система мостового землеробства
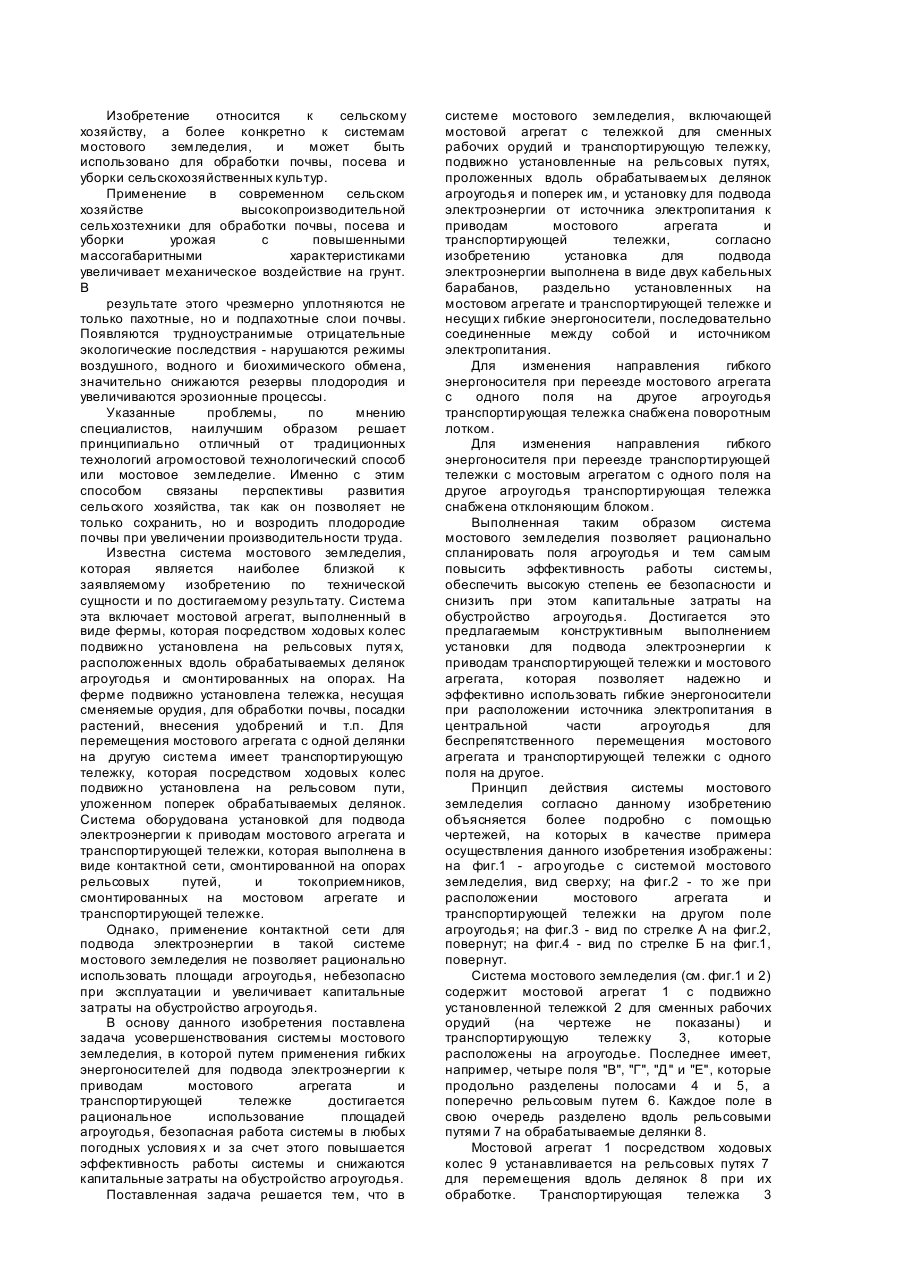
Номер патенту: 15172
Опубліковано: 30.06.1997
Автори: Карабльов Анатолій Германович, Колєсніков Олександр Григорович
МПК: A01B 49/00
Мітки: мостового, землеробства, система
Формула / Реферат:
1. Система мостового земледелия, включающая мостовой агрегат с тележкой для сменных рабочих орудий И транспортирующую тележку, подвижно установленные на рельсовых путях, проложенных вдоль обрабатываемых делянок агроугодья и поперек им, и установку для подвода электроэнергии от источника электропитания к приводам мостового агрегата и транспортирующей тележки, отличающаяся тем, что установка для подвода электроэнергии выполнена в виде двух...
Спосіб обробітку грунту та посіву сільськогосподарських культур і пристрій для його здійснення
Номер патенту: 35717
Опубліковано: 16.04.2001
Автори: Мороз Сергій Миколайович, Слободян Степан Миколайович, Нех Олександр Володимирович, Корнєв Юрій Миколайович, Шмат Сергій Іванович
МПК: A01B 71/00
Мітки: сільськогосподарських, здійснення, спосіб, обробітку, грунту, пристрій, культур, посіву
Формула / Реферат:
1. Спосіб обробітку грунту та посіву сільськогосподарських культур, який включає розпушення грунту за рахунок його щілювання на глибину 30...40 см і суміщену з ним сівбу сільськогосподарських культур, який відрізняється тим, що щілювання грунту проводять збоку та під рядком висіяного насіння. 2. Пристрій для обробітку грунту та посіву сільськогосподарських культур, який включає щілинорізи і посівні...
Попередній патент: Охолоджуючий пристрій для зниження зварювальних деформацій та напруг
Наступний патент: Спосіб оцінки рівня спеціальної підготовленості спортсменів у циклічних видах спорту
Випадковий патент: Спосіб формування гепатико-єюноанастомозу при хірургічному лікуванні хворих на злоякісні пухлини підшлункової залози, позапечінкових жовчних проток та жовчного міхура