Висівна система сівалки для точного землеробства
Номер патенту: 29525
Опубліковано: 15.11.2000
Автори: Гаврилюк Григорій Романович, Войтюк Дмитро Григорович, Ямков Олександр Володимирович, Бернхаррдт Герд, Аніскевич Леонід Володимирович
Текст
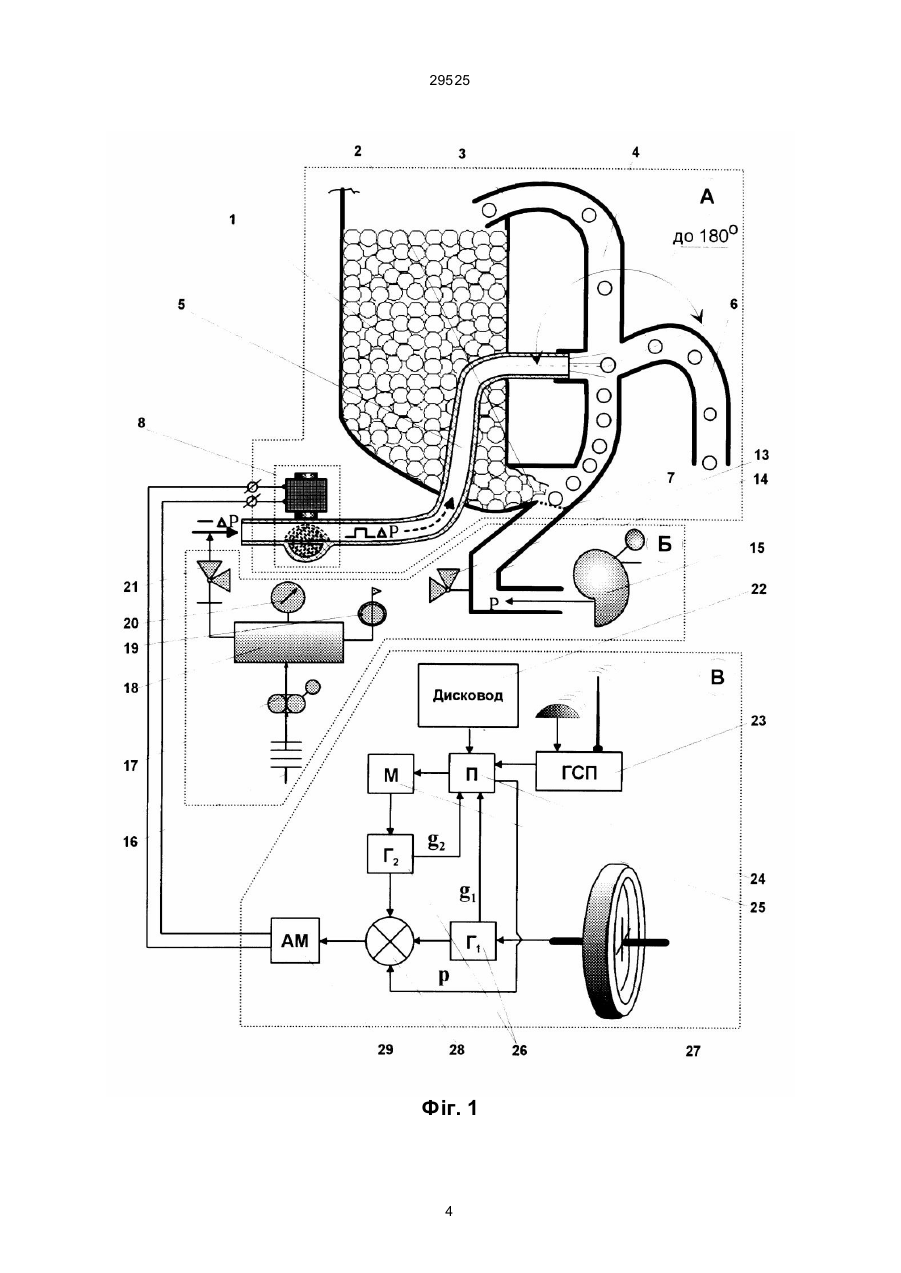
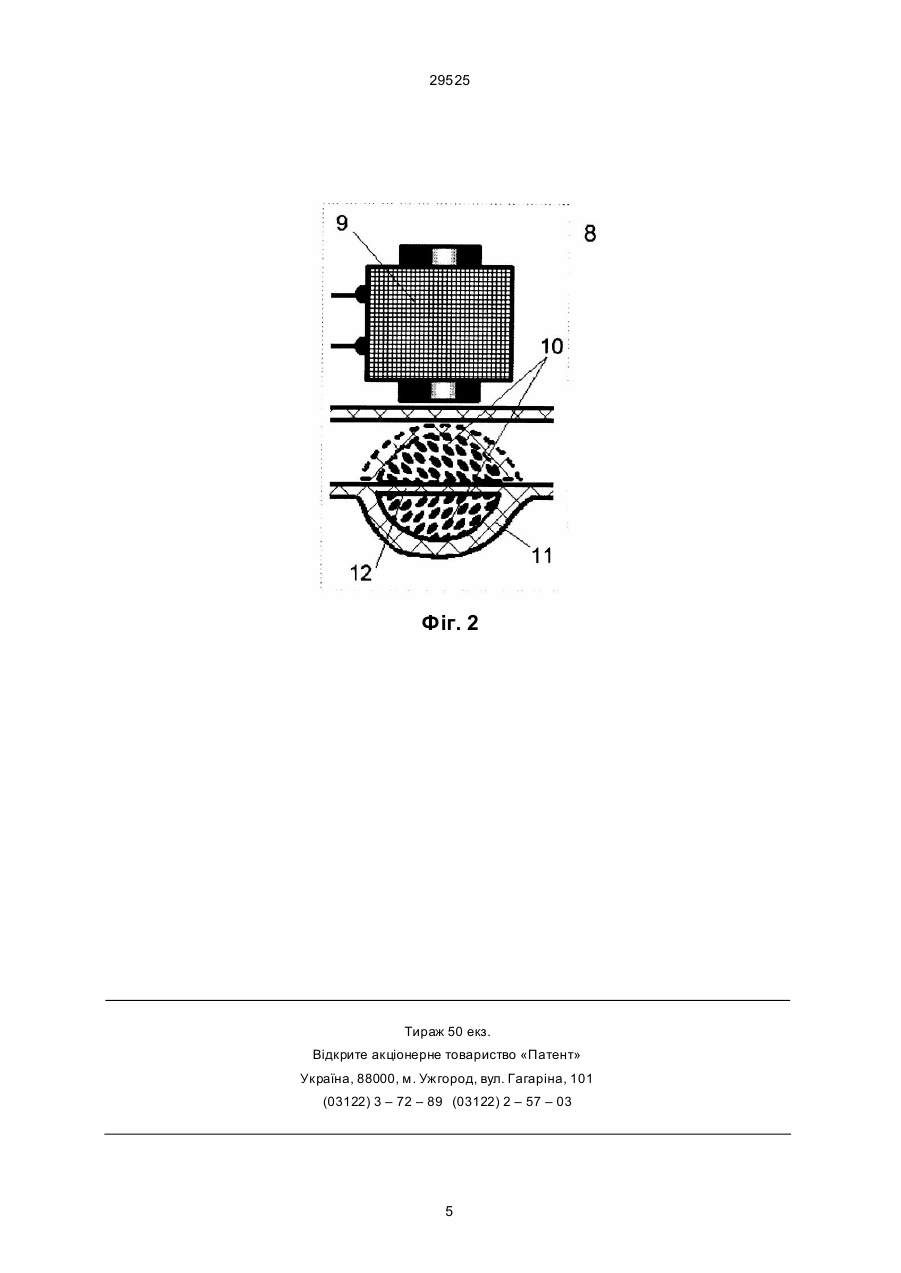
1. Висівна система сівалки для точного землеробства, яка містить мікропроцесорну систему формування керуючих імпульсних сигналів, пневматичні висівні апарати, що складаються з бункерів для насіння, забірних камер, робочих камер, приєднаних до висівних апаратів насіннєпроводів і повітропроводів, пневматичну систему приведення висівних апаратів в дію, що зв'язана з пневматичним висівним апаратом, яка відрізняється тим, що в мікропроцесорній системі формування керуючих імпульсних сигналів встановлено два незалежних генератори імпульсів, а також тим, що підсилювач мікропроцесорної системи – багатоканальний, з кількістю каналів підсилення, що відповідає кількості висівних апаратів, а самі пневматичні висівні апарати – імпульсної дії, з можливістю індивідуального керуван C2 (54) ВИСIВНА СИСТЕМА СIВАЛКИ ДЛЯ ТОЧНОГО ЗЕМЛЕРОБСТВА 29525 2043006. "Устройство контроля и управления расхо дом семян пневматической сеялкой" містить мікропроцесорну систему формування керуючих імпульсних сигналів, пневматичні висівні апарати, що складаються з бун керів для насіння, забірних камер, робочих камер, приєднаних до висівних апаратів насіннєпроводів і повітропроводів, пневматичну систе му приведення висівних апаратів в дію, що зв'язана з пневматичним висівним апаратом. Пневматична система має джерело і регулятор розрідження повітря. МікроЕОМ фор мує керуючі сигнали імпульсної форми, а в електронній схе мі пристрою є підсилювач, суматори і переключаючі пристрої. На валу ви сівного апарату встановлено корончастий диск, частота обертання якого реєструється датчиком, що підключений до електронної схеми. Основне призначення пристрою – можливість автоматичного контролю і управління витратою насінням сівалкою – досягається за рахунок встановлення під висівним апаратом датчика проходження насіння по насіннєпроводу, який (датчик) включений в схему високочастотного генератора, підключеного до блока управління на базі мікроЕОМ, яка через порт вводу-виводу інформації і через підсилювач потужності обмінюється даними з регулятором вакууму. Недоліком технічного рішення по патенту Російської Федерації № 2043006 є те, що регулювання витратою (нормою висіву) насінням відбувається за рахунок зміни робочого розрідження повітря в загальній для всієї сівалки пневматичній системі і те, що підсилювач електронної системи має один канал підсилення, що в сукупності не дозволяє уп равляти нормою висіву насіння по кожному ви сівному апарату, тобто по ширині захвату сівалки. Пристрій не має робочих органів контролю місцевизначених параметрів поля і, відповідно до цього, його не можна використовувати в технологіях точного землеробства, які потребують забезпечення програмованих змінних норм висіву насіння, і цей факт звужує універсальність застосування пристрою на сівалках. Крім того, відомий пристрій має електромеханічні засоби управління висівом насінням, що уск ладнює конструкцію висівної системи сівалки і підви щує ймовірність пошкодження насіння при роботі. Винаходом ставиться завдання забезпечення програмованих змінних норм висіву насіння пневматичною висівною системою сівалки з можливістю оперативного регулювання норми висіву на ходу, під час роботи сівалки, в напрямку її руху, а та кож в поперечному напрямку – по ширині захвату у відповідності з місцевизначеними даними про характеристики параметрів стану поля, підвищення універсальності висівної системи, спрощення конструкції, а також зменшення пошкодження насіння. Поставлене винахо дом завдання досягається тим, що висівна система сівалки для точного землеробства у складі мікропроцесорної системи формування керуючих імпульсних сигналів, пневматичних висівних апаратів, що складаються з бун керів для насіння, забірних камер, робочих камер, приєднаних до висівних апаратів насіннєпроводів і повітропроводів, пневматичної системи приведення висівних апаратів в дію, що зв'язана з пневматичними висівними апаратами, містить в мікропроцесорній системі формування керуючих імпульсних сигналів два незалежних генератора імпульсів, а та кож багатоканальний підсилювач мікропроцесорної системи з кількістю каналів підсилення, що відповідає кількості висівних апаратів, а самі пневматичні висівні апарати – імпульсної дії, з можливістю індивідуального керування висівом насіння по кожному з апаратів, робочі камери яких ви конані у вигляді пусто тілих форм з вертикальною віссю і з'єднані в нижній частині через сітку з повітропроводом подачі постійного пото ку повітря, а в верхній частині приєднані патрубки повернення надлишкового насіння і їх вихід з'єднаний з бункером для насіння, а в середній частині в робочі камери введені з протилежних від насіннєпроводів боків ежекторні патрубки, причому осьові лінії кожного насіннєпровода і ежекторного патрубка лежать в одній вертикальній площи ні і перетинаються в центрі робочої камери під тупим кутом до 180°, в кожному з ежекторних патрубків встановлені електромагнітні клапани з індивідуальним керуванням від процесора, що складаються з соленоїдів, які розташо вані в одних вертикальних площи нах з ежекторними патрубками над горизонтальними їх частинами в то му місці, де в замкненій еліпсоподібній порожнині між нижньою від соленоїда стінкою ежекторного патрубка і мембраною знахо диться фе росуспензія. На фіг.1 зображена принципова схе ма висівної системи сівалки для точного землеробства, на фіг. 2 - магнітний клапан керування висівом насіння висівним апаратом. Висівна систе ма сівалки скла дається з рами і змонтова них на ній пневматичних імпульсних ви сівних апа ратів А, пневматичної систе ми Б і мікропроцесорної систе ми кер ування пото ками насіння В. Кіль кість ви сівних апа ратів А в констр укції сі валки відпові дає кількості рядків, що засі вають ся. Пневматичний імпульсний висівний апарат А ск ладаєть ся з бункера для насіння 1, забірної камери 2; патр убка повернення надлишково го насіння 3; робочої камери 4; ежектор ного патрубка 5; насін нєпрово да 6; сі тки 7; магнітного клапана керуван ня висівом насіння 8, який складаєть ся (фі г.2 ) з соленоїда 9, феросуспензії 10, що я вляє собою суміш дрібнодисперсного магнітного мате ріалу і ріди ни, що знахо диться (феросуспензія) в замкненій порожнині 11 між стінками ежекторного патрубка 5 і мембрани 12. Пневматична систе ма Б (фіг.1) ск ладаєть ся з регулято ра тиску 13, вмон то ваного в пові тропровід 14; вен ти лятора 15; філь тра 16; моторакомпресора 17; ре сивера 18; за побіжного клапана 19; манометра 20; ре гульова ного дро селя 21. Мікропроцесорна система керування потоками насіння В складається з пристрою для зчитування інформації з магнітного носія з електронною картою сівби – дисковода 22, приймача сигналів глобальної систе ми позиціонування (ГСП) 23, процесора П 24, модулятора М 25, генераторів імпульсів 26: Г 1 - пе ретворювача обертального руху опорного колеса 27 сівалки в імпульсні сигнали і Г 2 - перетворювача електронної карти сівби в імпульсні сигнали; керованого суматора 28, багатоканального підсилювача AM 29. Всі вузли і дета лі висівної системи сівалки для точного землеробства змонтова ні на рамі. 2 29525 Висівна систе ма може працювати в режимах "Звичайний" і "ГСП". Останній режим призначений суто для те хнологій точного землеробства. Режим "Звичайний" призначений для роботи сівалки без використання глобальної системи позиціонування агрегату в полі, тобто для забезпечення сівби за звичайними технологіями. В цьому режимі роботи частота обертання опорно-приводного колеса 27 сівалки контролюється генератором Г 1, що на вихо ді формує імпульсний сигнал прямокутної форми певної частоти і скважності і подає його на керований суматор 28. Водночас з цим інформація про вихідний сигнал з генератора Г 1 по ланцюгу зво ротного зв'язку g1 подається на процесор 24. Процесор по ланцюгу керування р керує роботою сумато ра 28. З вихо ду суматора сигнал подається на бага токанальний підсилювач 29 і з нього імпульси струму передаються на магнітний клапан 8. В момент надходження імпульса струму на соленоїд 9 (фіг.2) його магнітне поле притягує до себе феросуспензію 10, долаючи при цьому сили пружної дефор мації мембрани 12. При цьому відбувається перекриття потоку повітря постійного тиску –DР, що надхо дить до ежекторного патрубка 5 з ресивера 18 через регульований дросель 21. В результаті на вихо ді ежекторного патрубка утворюється керований імпульсний потік повітря __П__ DР. Необхідний тиск повітря в ресивері забезпечується мотором-компресором 17, що засмоктує повітря через фільтр 16, і контролюється запобіжним клапаном 19 і манометром 20. Одночасно з вказаними вище процесами вентилятор 15 подає постійний потік повітря в робочу камеру 4 по дотичній до її вн утрішньої поверхні. В цю ж камеру із забірної камери 2 самопливом і за рахунок енергії потоку повітря, що прохо дить через сітку 7, подається в робочу камеру 4 насіння. Сітка 7 служить для запобігання самовитікання насіння через патрубок подачі повітря в неробочому стані. Насіння, що захоплене постійним потоком повітря, рухається вгору по вертикальній частині робочої камери 4. З ежекторного патрубка 5 вихо дить імпульсний потік повітря __П__ DР, енергія якого перевищує енергію пото ку суміші повітря і насіння в робочій камері 4, і то му імпульсний потік повітря захоплює насіння і виносить його з робочої камери 4 в насіннєпровід 6, які лежать в одній вертикальній площи ні і перетинаються під тупим кутом до 180°. Далі відбуваєть ся переміщення насіння в борозну і його заробка в грунт тра диційним засобом. Насіння, що не потрапило в насіннєпровід, по патрубку З повертаєть ся в бун кер насіння 1. В режимі "ГСП" частота обертання опорноприводного колеса 27 контролюється генератором Г 1, що по ланцюгу зворотного зв'язку g1 подає на процесор 24 інформацію про швидкість руху сівалки. Крім того, на процесор 24 від приймача 23 сигналів глобальної системи позиціонування надходить сигнал про світові координати положення агрегата в полі, а та кож сигнал від дисководу 22 з магнітним носієм електронної карти сівби, яка перетворюється в імпульсні сигнали генератором Г 2, процес роботи якого контролюється процесором П по ланцюгу зворотного зв'язку g2. Процесор обробляє всі сигнали, що надхо дять до нього, і че рез модулятор 25 і генератор Г 2 передає сигнали на суматор 28, стан якого також керується процесором по ланцюгу керування р. Суматор 28 через багатоканальний підсилювач 29 посилає індивідуальний сигнал на кожний з магнітних клапанів 8 висівних апаратів сівалки. Таким чином відбувається керування щільностями потоків насіння (тобто нормою висіву) у відповідності з місцевизначеними даними про характе ристики параметрів стану поля як в напрямку руху сі валки, так і в поперечному напрямку – по ширині захвату кожним висівним апаратом, тобто ви конується програмована норма висіву насіння. Далі технологічний процес сівби прохо дить аналогічно, як і в режимі "Звичайний". Той факт, що підсилювач 29 мікропроцесорної системи є багатоканальним, з кількістю каналів підсилювання, що відповідає кількості висівних апаратів, дозволяє регулювати норму висіву насіння в напрямку руху сівалки і в поперечному напрямку – по ширині її захвату, а фор ма робочих камер 4 у вигляді пустотілих форм з вертикальною віссю і розта шування їх вище патрубків 14 подачі постійного потоку повітря з сітками 7 і з'єднання у верхній частині з патрубками 3 повернення надлишкового насіння, а в середній части ні введення в них з протилежних боків, один проти одного ежекторних патрубків 5 і насіннєпроводів 6, дозволяє утворити постійний однозерновий висхідний потік насіння, що прохо дить повз вихід ежекторного патрубку 5 з керованим імпульсним потоком повітря, і тим самим забезпечити винос насіння з робочої камери 4 в насіннєпровід 6. Розташування насіннєпровода 6 і ежекторного патрубка 5 в одній вертикальній площи ні і під тупим кутом до 180о дозволяє виносити насіння у відповідності з моментом спрацьовування магнітних клапанів 8, що розташовані в кожному з ежекторних патрубків 5 і мають індивідуальне керування від процесора 24 через багатоканальний підсилювач 29, без травмування насіння. Запропонована пневматична висівна система з імпульсними висівними апаратами та з мікропроцесорним керуванням дозволяє забезпечити програмовані змінні норми висіву насіння з можливістю оперативного регулювання норми висіву на хо ду, під час ро боти сі валки, в напрямку її р уху, а також в поперечному напрямку – по ширині захвату у відповідності з місцевизначеними даними про ха рактеристики параметрів стану поля, спростити конструкцію висівної системи за рахунок зменшення кількості рухо мих меха нічних елементів, і зменшити пошкодження насіння. Останнє забезпечується тим, що в конструкції висівних апаратів запропонованої висівної системи відсутні меха нічні рухомі робочі елементи, що контактують з насінням, і це виключає попадання насіння в зони механічного защемлення і стискання. Підвищення універсальності ви сівної систе ми досягається застосуванням двох незалежних ге нераторів імпульсів, що дає змогу ви сівній системі працювати в режимах "Зви чайний" і "ГСП". Останній режим призначений для використання сівалок в технологіях точного землеробства. Запропонована висівна система дозволяє зекономити 10-25% посівного матеріалу і, за розрахун ками, сприяти ме підви щенню урожайності сільськогосподарських культур в се редньому на 57 ц/га. 3 29525 Фіг. 1 4 29525 Фіг. 2 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 5
ДивитисяДодаткова інформація
Назва патенту англійськоюSeeding system of precision agriculture seeder
Автори англійськоюAniskevych Leonid Volodymyrovych, Bernharrdt Gerd, Voitiuk Dmytro Hryhorovych, Havryliuk Hryhorii Romanovych, Yamkov Oleksandr Volodymyrovych
Назва патенту російськоюВысевная система сеялки для точного земледелия
Автори російськоюАнискевич Леонид Владимирович, Бернхаррдт Герд, Войтюк Дмитрий Григорьевич, Гаврилюк Григорий Романович, Ямков Александр Владимирович
МПК / Мітки
МПК: A01C 7/08
Мітки: система, сівалки, землеробства, висівна, точного
Код посилання
<a href="https://ua.patents.su/5-29525-visivna-sistema-sivalki-dlya-tochnogo-zemlerobstva.html" target="_blank" rel="follow" title="База патентів України">Висівна система сівалки для точного землеробства</a>
Висівна система

Номер патенту: 28119
Опубліковано: 16.10.2000
Автори: Ковшарь Володимир Мусійович, Іллін Олександр Михайлович
МПК: A01C 7/04
Текст:
...система, яка містить у собі бункер для насіння, дозатор із затвором, що керується електроприводом, електричо зв'язаним з опорним колесом системи через датчик швидкості руху, програмно-підсилювальний блок, блок контролю, сигналізації та індикації, проводи для насіння, витоки до яких виконані у дозаторі згідно з винаходом, має суттєві конструктивні зміни, а саме дозатор виконаний у вигляді циліндра з витоком для насіння у формі трикутного...
Повітророзподільник пневматичної сівалки
Номер патенту: 24480
Опубліковано: 21.07.1998
Автори: Коваленко Ростислав Борисович, Осипов Ігор Миколайович, Васильковський Олексій Михайлович
МПК: A01C 7/04
Мітки: повітророзподільник, сівалки, пневматичної
Формула / Реферат:
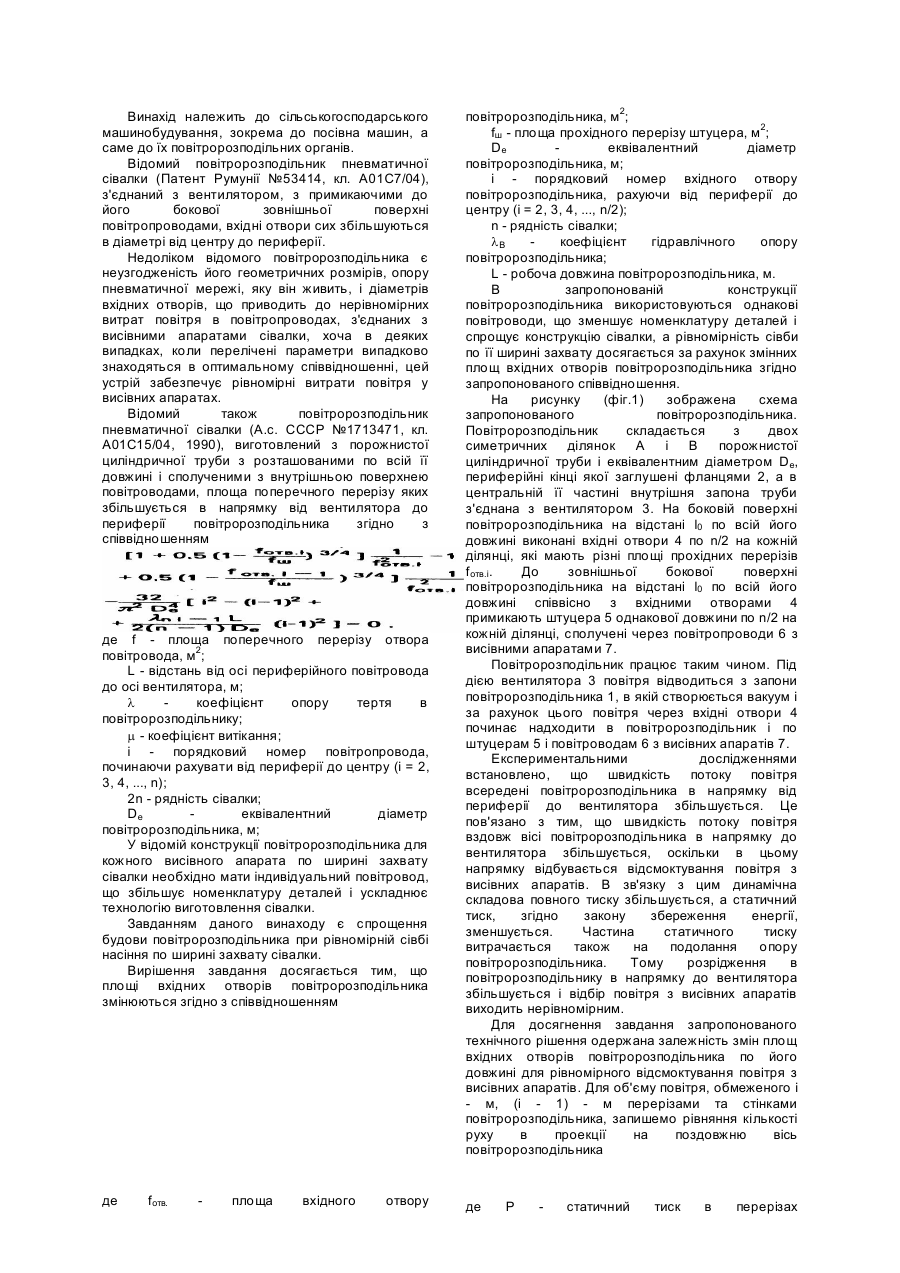
Повітророзподільник пневматичної сівалки, який складається з двох симетричних ділянок порожнистої циліндричної труби постійного поперечного перерізу, внутрішня запона якої в центральній частині з'єднана з вентилятором, а периферійні кінці заглушені, з виконаними на боковій поверхні по всій її довжині крізними отворами, площа поперечного перерізу яких збільшується від центра труби до її периферії, і приєднаними до них на одній вісі штуцерами,...
Висівний апарат сівалки зернової
Номер патенту: 505
Опубліковано: 15.09.2000
Автори: Хмеленко Андрій Олексійович, Риженко Микола Олексійович, Лопатін Володимир Юхимович, Касьяненко Олександр Павлович, Хмеленко Олексій Степанович
Мітки: апарат, висівний, сівалки, зернової
Формула / Реферат:
1. Висівний апарат сівалки зернової, що містить зерновисівну лійку і тукопровідний трубчастий зернопровід з розкидачем, розміщеним поза спареним дисковим сошником сівалки, який відрізняється тим, що робоча поверхня розкидача виконана у вигляді поверхні двічі косого циліндроїда, зокрема у вигляді поверхні косого клина з трьома напрямними, у якого середня напрямна – пряма лінія, а крайні напрямні – дуги кривих другого порядку з протилежним...
Система мостового землеробства
Номер патенту: 15172
Опубліковано: 30.06.1997
Автори: Колєсніков Олександр Григорович, Карабльов Анатолій Германович
МПК: A01B 49/00
Мітки: система, мостового, землеробства
Формула / Реферат:
1. Система мостового земледелия, включающая мостовой агрегат с тележкой для сменных рабочих орудий И транспортирующую тележку, подвижно установленные на рельсовых путях, проложенных вдоль обрабатываемых делянок агроугодья и поперек им, и установку для подвода электроэнергии от источника электропитания к приводам мостового агрегата и транспортирующей тележки, отличающаяся тем, что установка для подвода электроэнергии выполнена в виде двух...
Селектор радіосигналів точного часу
Номер патенту: 18810
Опубліковано: 25.12.1997
Автори: Лавров Геннадій Миколайович, Ванько Володимир Михайлович, Дороніна Ольга Михайлівна
МПК: G04C 11/00
Мітки: часу, радіосигналів, точного, селектор
Формула / Реферат:
Селектор радиосигналов точного времени, содержащий последовательно соединенные узкополосный фильтр, амплитудный детектор, усилитель, селектор по частоте повторения пачек импульсов, элемент ИЛИ и счетчик сигналов, отличающийся тем, что введен селектор числа импульсов в пачке, при этом, вход селектора числа импульсов в пачке соединен со входом селектора по частоте повторения пачек импульсов, дополнительный выход которого соединен со входом...
Попередній патент: Електроліт для електрохімічного конденсатору подвійного шару
Наступний патент: Спосіб виготовлення спіральношовних труб
Випадковий патент: Спосіб виробництва хлібобулочних виробів