Спосіб зварювання біологічної тканини, спосіб керування зварюванням біологічної тканини (варіанти) і пристрій для зварювання біологічної тканини (варіанти)
Номер патенту: 77064
Опубліковано: 16.10.2006
Автори: Іванова Ольга Н., Фурманов Юрій А., Лебедев Володимир К., Патон Борис Е., Масалов Юрій А., Лебедев Олексій В., Захараш Михайло П.


Формула / Реферат
1. Спосіб зварювання біологічної тканини, що включає:
(a) подачу напруги високої частоти, протягом першої стадії, до електродів інструмента для зварювання тканини;
(b) контроль повного опору тканини і визначення мінімального значення повного опору тканини, протягом першої стадії;
(c) визначення відносного повного опору тканини як відношення повного опору тканини до мінімального значення повного опору тканини;
(d) виявлення моменту, коли відносний повний опір тканини досягає попередньо визначеного значення відносного повного опору тканини;
(e) ініціювання другої стадії при досягненні відносним повним опором тканини попередньо визначеного значення відносного повного опору тканини;
(f) розрахунок тривалості другої стадії в залежності від тривалості першої стадії і
(g) подачу напруги високої частоти, протягом другої стадії, до електродів інструмента для зварювання тканини.
2. Спосіб за п. 1, який відрізняється тим, що напругу високої частоти, яку подають протягом першої стадії, підвищують за наступною формулою:
U = us ![]() tk, де:
tk, де:
U - напруга,
us - постійна,
t – час,
k - постійна, де k < 1.
3. Спосіб за п. 1, який відрізняється тим, що контроль повного опору тканини на кроці (b) включає вимірювання напруги високої частоти і електричного струму між електродами інструмента для зварювання тканини і розрахунок повного опору тканини діленням значення напруги на значення електричного струму.
4. Спосіб за п. 1, який відрізняється тим, що попередньо визначене значення відносного повного опору тканини розраховують в залежності від напруги високої частоти, яку подають протягом першої стадії.
5. Спосіб за п. 1, який відрізняється тим, що попередньо визначене значення відносного повного опору тканини вибирають в межах 1-1,5.
6. Спосіб за п. 1, який відрізняється тим, що напругу високої частоти, яку подають протягом другої стадії, розраховують в залежності від напруги високої частоти, яку подають наприкінці першої стадії, коли відносний повний опір тканини досягає попередньо визначеного значення відносного повного опору тканини.
7. Спосіб за п. 1, який відрізняється тим, що значення напруги високої частоти, яку подають протягом другої стадії, вибирають в межах 50-100% значення напруги високої частоти, яку подають наприкінці першої стадії.
8. Спосіб за п. 1, який відрізняється тим, що подача напруги високої частоти протягом другої стадії включає стабілізацію напруги високої частоти, яку подають протягом другої стадії.
9. Спосіб за п. 1, який відрізняється тим, що додатково включає модуляцію імпульсами напруги високої частоти, які подають протягом першої й другої стадій.
10. Спосіб за п. 9, який відрізняється тим, що подають імпульси, що мають частоту в межах 100 гц-60 кГц і коефіцієнт послідовності імпульсів у межах 10-90%.
11. Спосіб за п. 9, який відрізняється тим, що частоту вказаних імпульсів протягом першої й другої стадій змінюють.
12. Спосіб за п. 1, який відрізняється тим, що додатково включає модуляцію напруги високої частоти, яку подають протягом першої й другої стадій, імпульсами частотою 100 гц-60кГц і подальшу модуляцію напруги високої частоти, яку подають протягом другої стадії, низькочастотними імпульсами.
13. Спосіб за п. 12, який відрізняється тим, що додатково включає стабілізацію амплітуди напруги високої частоти, яку подають протягом другої стадії, а амплітуду напруги високої частоти розраховують у залежності від значення напруги високої частоти наприкінці першої стадії.
14. Спосіб за п. 12, який відрізняється тим, що частоту вказаних низькочастотних імпульсів визначають у залежності від тривалості першої стадії.
15. Спосіб за п. 12, який відрізняється тим, що частоту вказаних низькочастотних імпульсів визначають так, щоб число імпульсів протягом другої стадії знаходилось в межах 5-10.
16. Спосіб за п. 1, який відрізняється тим, що подача напруги високої частоти протягом другої стадії включає зміну напруги високої частоти в залежності від відносного повного опору тканини.
17. Спосіб за п. 16, який відрізняється тим, що додатково включає стабілізацію відносного повного опору тканини на рівні відносного повного опору тканини, досягнутому наприкінці першої стадії.
18. Спосіб за п. 16, який відрізняється тим, що напругу високої частоти, яку подають протягом другої стадії, змінюють у залежності від відносного повного опору тканини шляхом зниження напруги високої частоти, коли відносний повний опір тканини стає більше попередньо визначеного значення відносного повного опору тканини, і шляхом підвищення напруги високої частоти, коли відносний повний опір тканини стає менше попередньо визначеного значення відносного повного опору тканини.
19. Спосіб за п. 1, який відрізняється тим, що подача напруги високої частоти протягом другої стадії включає зміну напруги високої частоти для зміни відносного повного опору тканини за заданою програмою.
20. Спосіб за п. 1, який відрізняється тим, що включає модуляцію напруги високої частоти, яку подають протягом першої й другої стадій, імпульсами з частотою 100 гц-60кГц і подальшу модуляцію напруги високої частоти, яку подають протягом другої стадії, низькочастотними імпульсами, і далі стабілізацію відносного повного опору тканини на рівні відносного повного опору тканини, досягнутому наприкінці першої стадії.
21. Спосіб за п. 20, який відрізняється тим, що частоту вказаних низькочастотних імпульсів визначають у залежності від тривалості першої стадії.
22. Спосіб за п. 20, який відрізняється тим, що частоту низькочастотних імпульсів визначають так, щоб число імпульсів протягом другої стадії дорівнювало 5-10.
23. Спосіб за п. 20, який відрізняється тим, що стабілізацію відносного повного опору тканини здійснюють системою регулювання.
24. Спосіб за п. 23, який відрізняється тим, що відносний повний опір тканини стабілізують системою регулювання, змінюючи напругу високої частоти на попередньо визначену величину, причому зміна напруги високої частоти залежить від напряму зміни відносного повного опору тканини.
25. Спосіб за п. 1, який відрізняється тим, що додатково включає модуляцію напруги високої частоти, яку подають протягом першої і другої стадій, імпульсами з частотою 100 гц-60 кГц і подальшу модуляцію напруги високої частоти, яку подають протягом другої стадії, низькочастотними імпульсами, і подальшу зміну напруги високої частоти для зміни відносного повного опору тканини за заданою програмою.
26. Спосіб за п. 25, який відрізняється тим, що зміну відносного повного опору тканини здійснюють системою регулювання.
27. Спосіб за п. 1, який відрізняється тим, що включає контроль зварювання тканини і припинення зварювання тканини й подачу користувачеві сигналу при досягненні напруги високої частоти, яку подають протягом першої стадії, заданого рівня напруги високої частоти і (або) недосягненні відносним повним опором тканини попередньо визначеного значення відносного повного опору тканини.
28. Спосіб за п. 1, який відрізняється тим, що включає контроль зварювання тканини і припинення зварювання тканини й подачу користувачеві сигналу при досягненні повним опором тканини повного опору ланцюга короткого замикання електродів інструмента для зварювання тканини.
29. Спосіб за п. 1, який відрізняється тим, що включає контроль зварювання тканини і припинення зварювання тканини й подачу користувачеві сигналу при завершенні зварювання тканини наприкінці другої стадії і після того, як зварена тканина достатньо охолола.
30. Спосіб керування зварюванням біологічної тканини, що включає:
(a) подачу напруги високої частоти, що підвищується, до електродів інструмента для зварювання тканини протягом першої стадії;
(b) вимірювання значень напруги високої частоти й електричного струму, що проходить через тканину, і тривалості першої стадії;
(c) розрахунок значень повного опору тканини діленням значень напруги високої частоти на значення електричного струму;
(d) визначення мінімального значення повного опору тканини;
(e) запам'ятовування мінімального значення повного опору тканини;
(f) розрахунок значень відносного повного опору тканини діленням значень повного опору тканини на мінімальне значення повного опору тканини;
(g) припинення першої стадії, коли відносний повний опір тканини досягає кінцевого значення повного опору тканини, розрахованого в залежності від відносного повного опору тканини;
(h) запам'ятовування тривалості першої стадії й значення напруги високої частоти наприкінці першої стадії;
(і) розрахунок рівня напруги високої частоти для другої стадії у залежності від значення напруги високої частоти наприкінці першої стадії;
(j) розрахунок тривалості другої стадії у залежності від тривалості першої стадії і
(k) подачу протягом другої стадії напруги високої частоти з рівнем, розрахованим на кроці (і).
31. Спосіб керування зварюванням біологічної тканини, що включає:
(a) подачу напруги високої частоти, що підвищується, до електродів інструмента для зварювання тканини протягом першої стадії;
(b) вимірювання значень напруги високої частоти й електричного струму, що проходить через тканину, і тривалості першої стадії;
(c) розрахунок значень повного опору тканини діленням значень напруги високої частоти на значення електричного струму;
(d) визначення мінімального значення повного опору тканини;
(e) запам'ятовування мінімального значення повного опору тканини;
(f) розрахунок значень відносного повного опору тканини діленням значень повного опору тканини на мінімальне значення повного опору тканини;
(g) припинення першої стадії, коли відносний повний опір тканини досягає кінцевого значення повного опору тканини, розрахованого в залежності від відносного повного опору тканини;
(h) запам'ятовування тривалості першої стадії й значення напруги високої частоти наприкінці першої стадії;
(і) розрахунок рівня напруги високої частоти для другої стадії у залежності від значення напруги високої частоти наприкінці першої стадії;
(j) розрахунок тривалості другої стадії у залежності від тривалості першої стадії;
(k) розрахунок частоти модуляції у залежності від тривалості першої стадії і
(l) подачу протягом другої стадії напруги високої частоти з рівнем напруги високої частоти, розрахованим на кроці (і) для тривалості другої стадії, розрахованої на кроці (j), і модуляцію напруги високої частоти імпульсами з частотою модуляції, розрахованою на кроці (k).
32. Спосіб керування зварюванням біологічної тканини, що включає:
(a) подачу напруги високої частоти, що підвищується, до електродів інструмента для зварювання тканини протягом першої стадії;
(b) вимірювання значень напруги високої частоти й електричного струму, що проходить через тканину, і тривалості першої стадії;
(c) розрахунок значень повного опору тканини діленням значень напруги високої частоти на значення електричного струму;
(d) визначення мінімального значення повного опору тканини;
(e) запам'ятовування мінімального значення повного опору тканини;
(f) розрахунок значень відносного повного опору тканини діленням значень повного опору тканини на мінімальне значення повного опору тканини;
(g) припинення першої стадії, коли відносний повний опір тканини досягає кінцевого значення повного опору тканини, розрахованого в залежності від відносного повного опору тканини;
(h) запам'ятовування тривалості першої стадії й значення напруги високої частоти наприкінці першої стадії;
(і) розрахунок тривалості другої стадії у залежності від тривалості першої стадії і
(j) подачу протягом другої стадії напруги високої частоти, причому напругу високої частоти змінюють у залежності від відносного повного опору тканини протягом другої стадії.
33. Спосіб керування зварюванням біологічної тканини, що включає:
(a) подачу напруги високої частоти, що підвищується, до електродів інструмента для зварювання тканини протягом першої стадії;
(b) вимірювання значень напруги високої частоти й електричного струму, що проходить через тканину, і тривалості першої стадії;
(c) розрахунок значень повного опору тканини діленням значень напруги високої частоти на значення електричного струму;
(d) визначення мінімального значення повного опору тканини;
(e) запам'ятовування мінімального значення повного опору тканини;
(f) розрахунок значень відносного повного опору тканини діленням значень повного опору тканини на мінімальне значення повного опору тканини;
(g) припинення першої стадії, коли відносний повний опір тканини досягає кінцевого значення повного опору тканини, розрахованого в залежності від відносного повного опору тканини;
(h) запам'ятовування тривалості першої стадії й значення напруги високої частоти наприкінці першої стадії;
(і) розрахунок початкового рівня напруги високої частоти для другої стадії у залежності від значення напруги високої частоти наприкінці першої стадії;
(j) розрахунок тривалості другої стадії у залежності від тривалості першої стадії;
(k) розрахунок частоти модуляції у залежності від тривалості першої стадії і
(l) подачу протягом другої стадії напруги високої частоти для тривалості другої стадії, розрахованої на кроці (j), при початковому завданні амплітуди напруги високої частоти з початковим рівнем напруги високої частоти, розрахованим на кроці (і), модуляцію напруги високої частоти імпульсами з частотою модуляції, розрахованою на кроці (k), і зміну амплітуди напруги високої частоти в залежності від відносного повного опору тканини.
34. Спосіб за п. 33, який відрізняється тим, що додатково включає стабілізацію відносного повного опору із значенням кінцевого відносного повного опору тканини.
35. Спосіб за п. 34, який відрізняється тим, що стабілізацію відносного повного опору тканини здійснюють системою регулювання, яка стабілізує відносний повний опір тканини, змінюючи амплітуду імпульсів напруги високої частоти на попередньо визначену величину, причому напругу високої частоти змінюють у залежності від зміни відносного повного опору тканини.
36. Спосіб за п. 33, який відрізняється тим, що зміна відносного повного опору тканини на кроці (l) включає в себе зміну напруги високої частоти для зміни відносного повного опору за заданою програмою.
37. Пристрій для зварювання тканини, що містить: хірургічний інструмент, що має електроди, адаптовані для контакту з тканиною, що зварюється, джерело живлення, підключене до вказаних електродів для подачі напруги високої частоти, причому вказане джерело живлення містить один або декілька датчиків для вимірювання напруги високої частоти й струму між електродами, і керуючий пристрій, підключений до вказаного джерела живлення, який відрізняється тим, що керуючий пристрій має можливість керування джерелом живлення для подачі напруги високої частоти на електроди протягом першої стадії, контролювання повного опору, визначення мінімального значення повного опору тканини, визначення відносного повного опору тканини як відношення виміряного повного опору тканини і мінімального значення повного опору тканини, виявлення, коли відносний повний опір тканини досягає попередньо визначеного значення повного опору тканини протягом першої стадії, і керування джерелом живлення для подачі напруги високої частоти протягом другої стадії, причому тривалість другої стадії розраховується вказаним керуючим пристроєм в залежності від тривалості першої стадії.
38. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керування джерелом живлення для подачі напруги високої частоти протягом першої стадії таким чином, що напруга високої частоти підвищується, причому вказане підвищення напруги високої частоти описується наступною формулою:
U = us ![]() tk, де:
tk, де:
U - напруга,
us - постійна,
t - час,
k - постійна, де k < 1.
39. Пристрій за п. 37, який відрізняється тим, що вказаний керуючий пристрій має можливість розрахунку повного опору тканини в залежності від часу діленням напруги високої частоти на електричний струм.
40. Пристрій за п. 37, який відрізняється тим, що попередньо визначене значення відносного повного опору тканини розраховане в залежності від зміни напруги високої частоти протягом першої стадії.
41. Пристрій за п. 37, який відрізняється тим, що попередньо визначене значення відносного повного опору тканини знаходиться в межах від 1 до 1,5.
42. Пристрій за п. 37, який відрізняється тим, що вказаний керуючий пристрій має можливість розрахувати напругу високої частоти, що подається протягом другої стадії, в залежності від значення напруги високої частоти, що подається протягом першої стадії, коли відносний повний опір тканини досягає попередньо визначеного значення відносного повного опору тканини.
43. Пристрій за п. 37, який відрізняється тим, що напруга високої частоти, що подається протягом другої стадії, дорівнює 50-100% значення напруги високої частоти, що подається протягом першої стадії, коли відносний повний опір тканини досягає попередньо визначеного значення відносного повного опору тканини.
44. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керування джерелом живлення з можливістю стабілізації напруги високої частоти, що подається протягом другої стадії.
45. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керування джерелом живлення з можливістю модулювання напруги високої частоти, що подаються протягом першої й другої стадій, імпульсами.
46. Пристрій за п. 45, який відрізняється тим, що вказані імпульси мають частоту в межах від 100 гц до 60 кГц і коефіцієнт послідовності імпульсів - 10-90%.
47. Пристрій за п. 45, який відрізняється тим, що протягом першої й другої стадій частота імпульсів змінюється.
48. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керування джерелом живлення з можливістю модулювання напруги високої частоти, що подається протягом першої й другої стадій, імпульсами частотою 100 гц-60кГц і, крім того, модулювання напруги високої частоти, що подається протягом другої стадії, низькочастотними імпульсами.
49. Пристрій за п. 48, який відрізняється тим, що керуючий пристрій має можливість керування джерелом живлення з можливістю стабілізації амплітуди напруги високої частоти, що подається протягом другої стадії, причому амплітуда вказаної напруги високої частоти розраховується в залежності від значення напруги високої частоти, що подається протягом першої стадії, коли відносний повний опір тканини досягає попередньо визначеного значення відносного повного опору тканини.
50. Пристрій за п. 48, який відрізняється тим, що частота вказаних низькочастотних імпульсів визначена в залежності від тривалості першої стадії.
51. Пристрій за п. 48, який відрізняється тим, що частота низькочастотних імпульсів визначена так, що число імпульсів протягом другої стадії становить від 5 до 10.
52. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керування джерелом живлення з можливістю зміни напруги високої частоти, що подається протягом другої стадії, в залежності від відносного повного опору тканини.
53. Пристрій за п. 52, який відрізняється тим, що керуючий пристрій має можливість керування джерелом живлення з можливістю зміни напруги високої частоти протягом другої стадії так, щоб стабілізувати відносний повний опір тканини на рівні відносного повного опору тканини, досягнутому наприкінці першої стадії.
54. Пристрій за п. 52, який відрізняється тим, що керуючий пристрій має можливість керувати джерелом живлення з можливістю зміни напруги високої частоти, що подається протягом другої стадії, в залежності від відносного повного опору тканини шляхом зниження напруги високої частоти при перевищенні відносним повним опором тканини попередньо визначеного значення відносного повного опору тканини й підвищення напруги високої частоти, коли відносний повний опір тканини менше попередньо визначеного значення відносного повного опору тканини.
55. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керувати джерелом живлення для подачі напруги високої частоти протягом другої стадії з можливістю регулювання відносного повного опору тканини.
56. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керувати джерелом живлення з можливістю модулювання напруги високої частоти, що подається протягом першої й другої стадій, імпульсами частотою від 100 гц до 60 кГц і, крім того, модулювання напруги високої частоти, що подається протягом другої стадії, низькочастотними імпульсами, а керуючий пристрій має можливість керувати джерелом живлення для подачі напруги високої частоти протягом другої стадії з можливістю стабілізувати відносний повний опір тканини на рівні відносного повного опору тканини, досягнутому наприкінці першої стадії.
57. Пристрій за п. 56, який відрізняється тим, що частота вказаних низькочастотних імпульсів визначена в залежності від тривалості першої стадії.
58. Пристрій за п. 56, який відрізняється тим, що частота низькочастотних імпульсів визначена так, що число імпульсів протягом другої стадії становить 5-10.
59. Пристрій за п. 56, який відрізняється тим, що керуючий пристрій містить також систему регулювання для стабілізації відносного повного опору тканини.
60. Пристрій за п. 59, який відрізняється тим, що система регулювання має можливість стабілізувати відносний повний опір тканини шляхом зміни напруги високої частоти на попередньо визначену величину, причому напруга високої частоти змінюється в залежності від напряму зміни відносного повного опору тканини.
61. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керувати джерелом живлення з можливістю модулювання напруги високої частоти, що подається протягом першої й другої стадій, імпульсами частотою в межах від 100 гц до 60кГц і, крім того, модулювання напруги високої частоти, що подається протягом другої стадії, низькочастотними імпульсами, а керуючий пристрій має можливість керувати джерелом живлення для подачі напруги високої частоти протягом другої стадії з можливістю регулювання відносного повного опору тканини.
62. Пристрій за п. 37, який відрізняється тим, що містить систему регулювання відносного повного опору тканини шляхом зміни напруги високої частоти на попередньо визначену величину, причому напруга високої частоти змінюється в залежності від напряму зміни відносного повного опору тканини.
63. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій містить також пристрій для контролю зварювання тканини, припинення зварювання тканини й подачі користувачеві сигналу при досягненні напруги високої частоти, що подається протягом першої стадії, заданого рівня напруги високої частоти і (або) недосягненні відносним повним опором тканини попередньо визначеного значення відносного повного опору тканини.
64. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій містить також пристрій для контролю зварювання тканини й припинення зварювання тканини й подачі користувачеві сигналу при досягненні повним опором тканини повного опору ланцюга короткого замикання електродів інструмента для зварювання тканини.
65. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій містить також пристрій для контролю зварювання тканини й подачі користувачеві сигналу при завершенні зварювання тканини наприкінці другої стадії і після того, як зварена тканина достатньо охолола.
66. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій містить також пристрій для контролю зварювання і, якщо повний опір тканини перевищує задане значення і (або) тривалість першої стадії перевищує задану тривалість, керуючий пристрій має можливість підтримувати напругу високої частоти на постійному рівні протягом заданого періоду і зупиняти зварювання тканини і подавати сигнал користувачеві, якщо відносний повний опір тканини не досяг попередньо визначеного значення відносного повного опору тканини.
67. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керувати джерелом живлення з можливістю апроксимації напруги високої частоти, що поступово підвищується, декількома прямолінійними ділянками.
68. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій містить також фільтр для фільтрування значень повного опору тканини.
69. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керувати тривалістю першої стадії у залежності від відносного повного опору тканини.
70. Пристрій за п. 45, який відрізняється тим, що керуючий пристрій має можливість регулювати частоту імпульсів модуляції у межах 100 гц-60 кГц для забезпечення мінімального опору тканини.
71. Пристрій за п. 45, який відрізняється тим, що керуючий пристрій має можливість регулювати коефіцієнт послідовності імпульсів модуляції при зварюванні тканини так, що зменшує витрату енергії на руйнування і нагрів тканини.
72. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість керувати також джерелом живлення так, що у проміжки часу між сеансами зварювання подає на електроди пачки модульованих імпульсів напруги високої частоти, причому тривалість пачки імпульсів становить від 2 до 15 мс, частота пачки імпульсів становить 3-15 Гц, причому зварювання ініціюється, якщо середній опір між електродами нижче заданого значення.
73. Пристрій за п. 37, який відрізняється тим, що керуючий пристрій має можливість розраховувати під час зварювання температуру електродів, температуру тканини, що знаходиться між електродами, і міру коагуляції тканини за допомогою математичної моделі на основі відомих значень електричного струму й напруги високої частоти.
74. Пристрій за п. 73, який відрізняється тим, що розраховані значення використані для регулювання швидкості підвищення напруги високої частоти протягом першої стадії й тривалості зварювання тканини.
75. Пристрій для зварювання біологічної тканини, що містить:
(а) засіб для подачі напруги високої частоти протягом першої стадії до електродів інструмента для зварювання тканини;
(b) засіб для контролю повного опору тканини й визначення мінімального значення повного опору тканини протягом першої стадії;
(c) засіб для визначення відносного повного опору тканини, причому відносний повний опір тканини дорівнює відношенню повного опору тканини до мінімального значення повного опору тканини;
(d) засіб для виявлення моменту, коли відносний повний опір тканини досягає попередньо визначеного значення повного опору тканини;
(e) засіб для ініціювання другої стадії при досягненні відносним повним опором тканини попередньо визначеного значення відносного повного опору тканини;
(f) засіб для розрахунку тривалості другої стадії у залежності від тривалості першої і
(g) засіб для подачі напруги високої частоти протягом другої стадії до електродів інструмента для зварювання тканини.
76. Пристрій за п. 75, який відрізняється тим, що амплітуда напруги високої частоти, що подається протягом першої стадії, підвищена за наступною формулою:
U = us ![]() tk, де:
tk, де:
U - напруга,
us - постійна,
t - час,
k - постійна, де k < 1.
77. Пристрій за п. 75, який відрізняється тим, що засіб для контролю повного опору тканини містить засіб для вимірювання напруги високої частоти і електричного струму між електродами інструмента для зварювання тканини й розрахунку повного опору тканини діленням напруги на електричний струм.
78. Пристрій за п. 75, який відрізняється тим, що попередньо визначене значення відносного повного опору тканини розраховане в залежності від напруги високої частоти протягом першої стадії.
79. Пристрій за п. 75, який відрізняється тим, що попередньо визначене значення відносного повного опору тканини знаходиться в межах від 1 до 1,5.
80. Пристрій за п. 75, який відрізняється тим, що напруга високої частоти, що подається протягом другої стадії, розрахована в залежності від значення напруги високої частоти, що подається протягом першої стадії, коли відносний повний опір тканини досягає попередньо визначеного значення відносного повного опору тканини.
81. Пристрій за п. 75, який відрізняється тим, що напруга високої частоти, що подається протягом другої стадії, становить 50-100% значення напруги високої частоти, що подається наприкінці першої стадії.
82. Пристрій за п. 75, який відрізняється тим, що засіб для подачі напруги високої частоти протягом другої стадії містить засіб для стабілізації напруги високої частоти, що подається протягом другої стадії.
83. Пристрій за п. 75, який відрізняється тим, що містить засіб для модуляції напруги високої частоти протягом першої й другої стадій імпульсами.
84. Пристрій за п. 83, який відрізняється тим, що імпульси мають частоту в межах 100 Гц-60 кГц, а коефіцієнт послідовності імпульсів становить від 10% до 90%.
85. Пристрій за п. 83, який відрізняється тим, що протягом першої й другої стадій частота імпульсів змінюється.
86. Пристрій за п. 75, який відрізняється тим, що містить засіб для модуляції напруги високої частоти, що подається протягом першої й другої стадій, імпульсами частотою в межах 100 Гц-60 кГц і, крім того, модуляції напруги високої частоти, що подається протягом другої стадії, низькочастотними імпульсами.
87. Пристрій за п. 86, який відрізняється тим, що містить засіб для стабілізації амплітуди напруги високої частоти, що подається протягом другої стадії, а амплітуда вказаної напруги високої частоти розрахована в залежності від значення напруги високої частоти наприкінці першої стадії.
88. Пристрій за п. 86, який відрізняється тим, що частота низькочастотних імпульсів визначена в залежності від тривалості першої стадії.
89. Пристрій за п. 86, який відрізняється тим, що частота низькочастотних імпульсів визначена так, що число імпульсів протягом другої стадії становить 5-10.
90. Пристрій за п. 75, який відрізняється тим, що засіб для подачі напруги високої частоти протягом другої стадії містить засіб для зміни напруги високої частоти в залежності від відносного повного опору тканини.
91. Пристрій за п. 90, який відрізняється тим, що містить засіб для стабілізації відносного повного опору тканини на рівні відносного повного опору тканини, досягнутому наприкінці першої стадії.
92. Пристрій за п. 90, який відрізняється тим, що напруга високої частоти, що подається протягом другої стадії, змінюється в залежності від відносного повного опору тканини шляхом зниження напруги високої частоти при перевищенні відносним повним опором тканини попередньо визначеного значення відносного повного опору тканини й підвищення напруги високої частоти, коли відносний повний опір тканини менше попередньо визначеного значення відносного повного опору тканини.
93. Пристрій за п. 75, який відрізняється тим, що засіб для подачі напруги високої частоти протягом другої стадії містить засіб для зміни напруги високої частоти для зміни відносного повного опору тканини за заданою програмою.
94. Пристрій за п. 75, який відрізняється тим, що містить засіб для модуляції напруги високої частоти, що подається протягом першої й другої стадій, імпульсами частотою 100 Гц-60 кГц і, крім того, модуляції напруги високої частоти, що подається протягом другої стадії, низькочастотними імпульсами і тим, що містить також засіб для стабілізації відносного повного опору тканини на рівні відносного повного опору тканини, досягнутому наприкінці першої стадії.
95. Пристрій за п. 94, який відрізняється тим, що частота низькочастотних імпульсів визначена в залежності від тривалості першої стадії.
96. Пристрій за п. 94, який відрізняється тим, що частота низькочастотних імпульсів визначена так, що число імпульсів протягом другої стадії дорівнює 5-10.
97. Пристрій за п. 94, який відрізняється тим, що стабілізація відносного повного опору тканини здійснена засобом системи регулювання.
98. Пристрій за п. 97, який відрізняється тим, що вказаний засіб системи регулювання має можливість стабілізувати відносний повний опір тканини шляхом зміни напруги високої частоти на попередньо визначену величину, причому напруга високої частоти змінюється в залежності від напряму зміни відносного повного опору тканини.
99. Пристрій за п. 75, який відрізняється тим, що містить засіб для модуляції напруги високої частоти, що подається протягом першої й другої стадій, імпульсами частотою 100 Гц-60 кГц і, крім того, модуляції напруги високої частоти, що подається протягом другої стадії, низькочастотними імпульсами і містить засіб для зміни напруги високої частоти для зміни відносного повного опору тканини за заданою програмою.
100. Пристрій за п. 99, який відрізняється тим, що зміна відносного повного опору тканини здійснена засобом системи регулювання.
101. Пристрій за п. 75, який відрізняється тим, що містить засіб для контролю зварювання тканини, припинення зварювання тканини й подачі користувачеві сигналу при досягненні напруги високої частоти, що подається протягом першої стадії, заданого рівня напруги високої частоти і (або) недосягненні відносним повним опором тканини попередньо визначеного значення відносного повного опору тканини.
102. Пристрій за п. 75, який відрізняється тим, що містить засіб для контролю зварювання тканини, припинення зварювання тканини й подачі користувачеві сигналу при досягненні повним опором тканини повного опору ланцюга короткого замикання електродів інструмента для зварювання тканини.
103. Пристрій за п. 75, який відрізняється тим, що містить засіб для контролю зварювання тканини й подачі користувачеві сигналу при завершенні зварювання тканини наприкінці другої стадії і після того, як зварена тканина достатньо охолола.
Текст
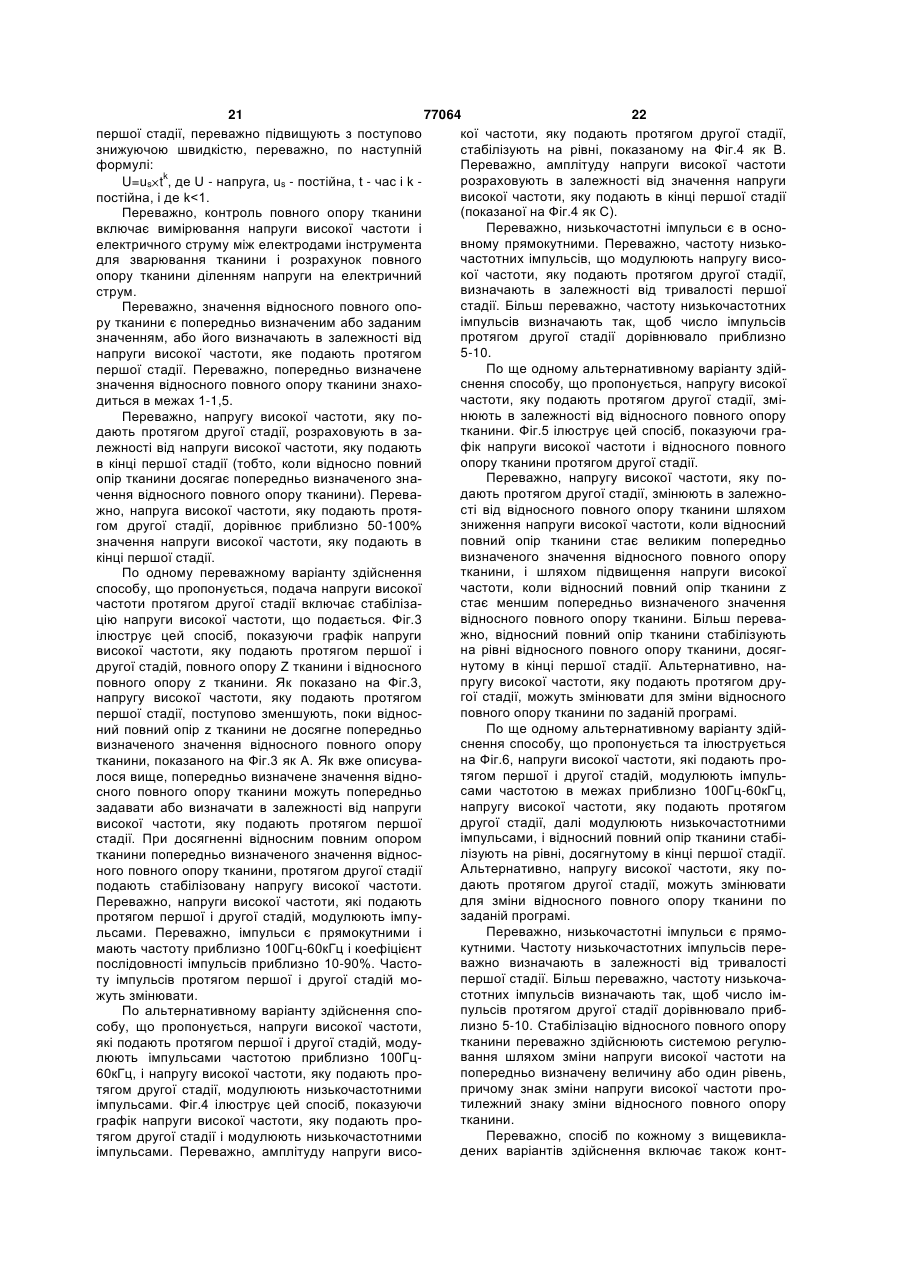
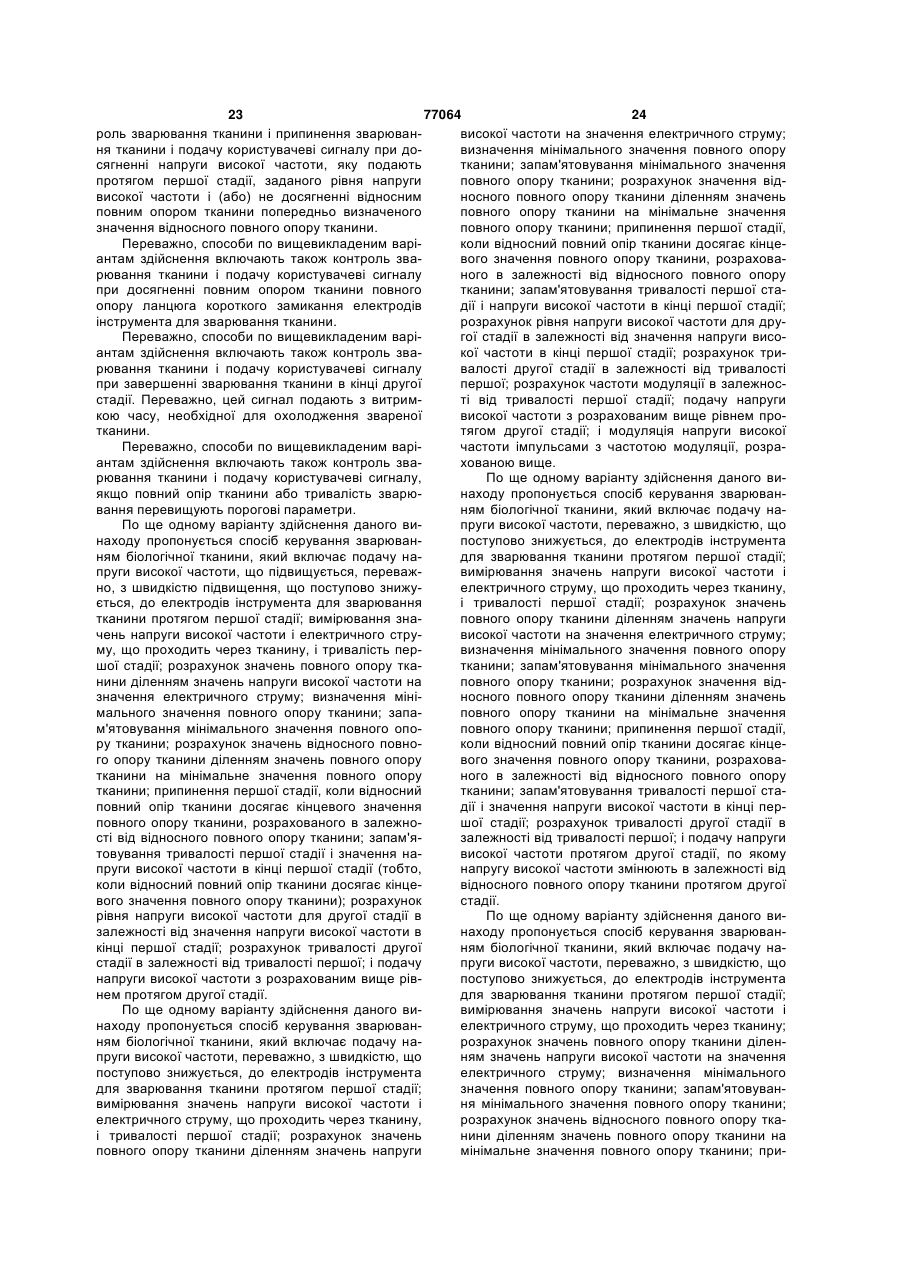
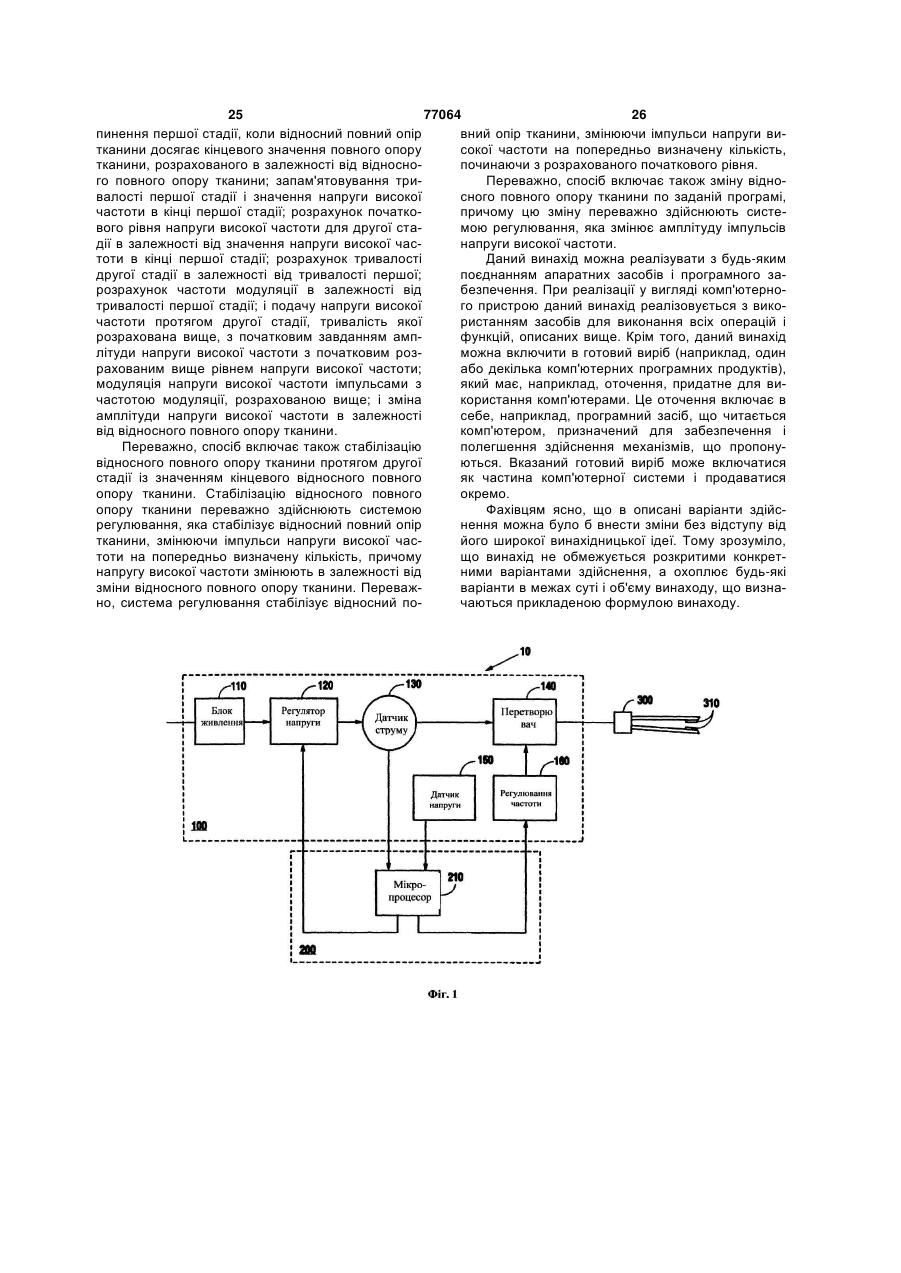
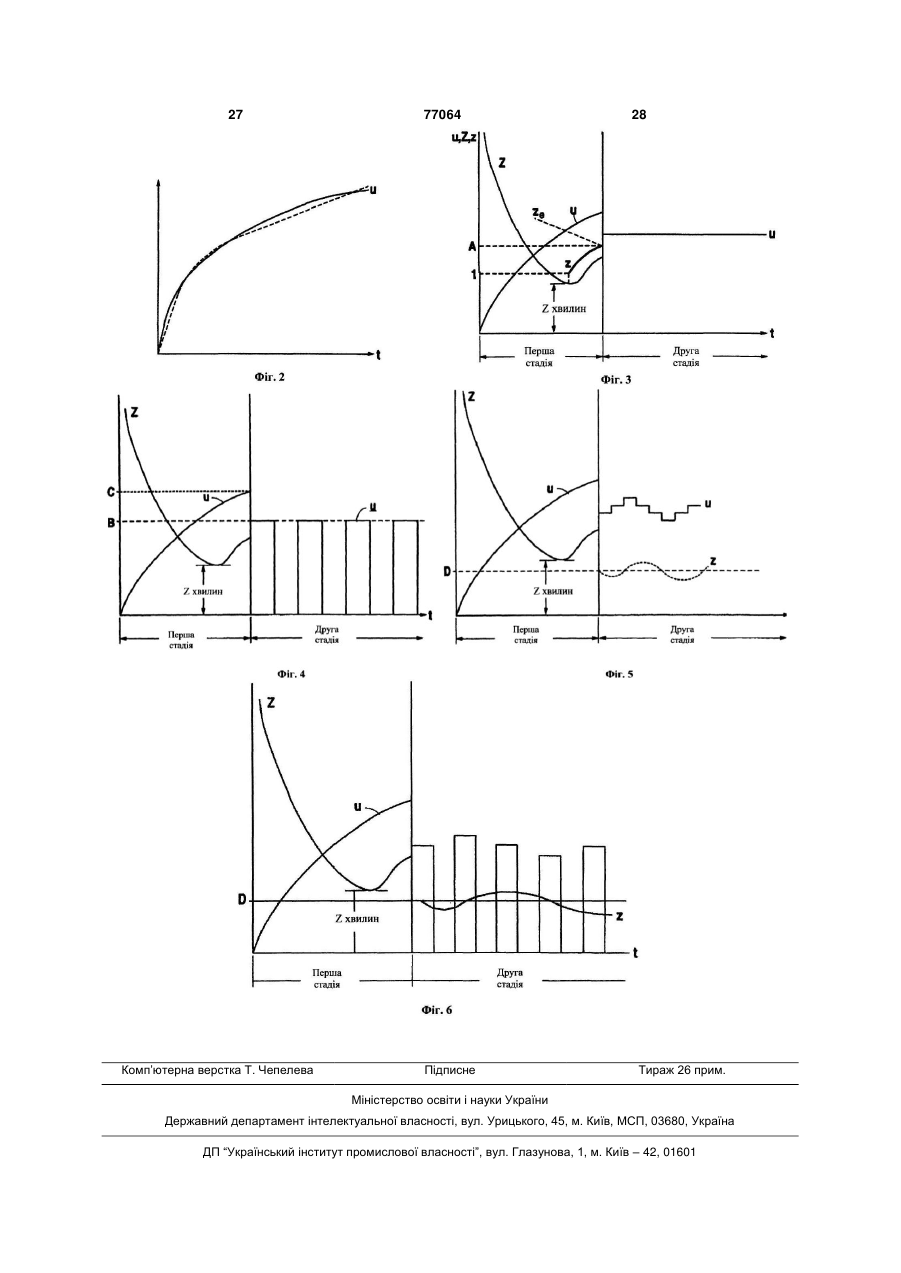
1. Спосіб зварювання біологічної тканини, що включає: (a) подачу напруги високої частоти, протягом першої стадії, до електродів інструмента для зварювання тканини; (b) контроль повного опору тканини і визначення мінімального значення повного опору тканини, протягом першої стадії; (c) визначення відносного повного опору тканини як відношення повного опору тканини до мінімального значення повного опору тканини; (d) виявлення моменту, коли відносний повний опір тканини досягає попередньо визначеного значення відносного повного опору тканини; (e) ініціювання другої стадії при досягненні відносним повним опором тканини попередньо визначеного значення відносного повного опору тканини; (f) розрахунок тривалості другої стадії в залежності від тривалості першої стадії і (g) подачу напруги високої частоти, протягом другої стадії, до електродів інструмента для зварювання тканини. 2. Спосіб за п.1, який відрізняється тим, що напругу високої частоти, яку подають протягом першої стадії, підвищують за наступною формулою: U = us tk, де: U - напруга, us - постійна, t – час, k - постійна, де k < 1. 2 (19) 1 3 77064 4 25. Спосіб за п.1, який відрізняється тим, що додуляцію напруги високої частоти, яку подають протягом другої стадії, низькочастотними імпульсами. датково включає модуляцію напруги високої час13. Спосіб за п.12, який відрізняється тим, що тоти, яку подають протягом першої і другої стадій, додатково включає стабілізацію амплітуди напруги імпульсами з частотою 100Гц-60кГц і подальшу високої частоти, яку подають протягом другої стамодуляцію напруги високої частоти, яку подають дії, а амплітуду напруги високої частоти розрахопротягом другої стадії, низькочастотними імпульвують у залежності від значення напруги високої сами, і подальшу зміну напруги високої частоти частоти наприкінці першої стадії. для зміни відносного повного опору тканини за 14. Спосіб за п.12, який відрізняється тим, що заданою програмою. 26. Спосіб за п.25, який відрізняється тим, що частоту вказаних низькочастотних імпульсів визначають у залежності від тривалості першої стазміну відносного повного опору тканини здійснюдії. ють системою регулювання. 15. Спосіб за п.12, який відрізняється тим, що 27. Спосіб за п.1, який відрізняється тим, що частоту вказаних низькочастотних імпульсів вивключає контроль зварювання тканини і припизначають так, щоб число імпульсів протягом другої нення зварювання тканини й подачу користувачеві стадії знаходилось в межах 5-10. сигналу при досягненні напруги високої частоти, 16. Спосіб за п.1, який відрізняється тим, що пояку подають протягом першої стадії, заданого рівдача напруги високої частоти протягом другої станя напруги високої частоти і (або) недосягненні дії включає зміну напруги високої частоти в залежвідносним повним опором тканини попередньо ності від відносного повного опору тканини. визначеного значення відносного повного опору 17. Спосіб за п.16, який відрізняється тим, що тканини. 28. Спосіб за п.1, який відрізняється тим, що додатково включає стабілізацію відносного повного опору тканини на рівні відносного повного опору включає контроль зварювання тканини і припитканини, досягнутому наприкінці першої стадії. нення зварювання тканини й подачу користувачеві 18. Спосіб за п.16, який відрізняється тим, що сигналу при досягненні повним опором тканини напругу високої частоти, яку подають протягом повного опору ланцюга короткого замикання елекдругої стадії, змінюють у залежності від відносного тродів інструмента для зварювання тканини. 29. Спосіб за п.1, який відрізняється тим, що повного опору тканини шляхом зниження напруги високої частоти, коли відносний повний опір ткавключає контроль зварювання тканини і припинини стає більше попередньо визначеного значеннення зварювання тканини й подачу користувачеві ня відносного повного опору тканини, і шляхом сигналу при завершенні зварювання тканини напідвищення напруги високої частоти, коли відносприкінці другої стадії і після того, як зварена тканий повний опір тканини стає менше попередньо нина достатньо охолола. визначеного значення відносного повного опору 30. Спосіб керування зварюванням біологічної тканини. тканини, що включає: 19. Спосіб за п.1, який відрізняється тим, що по(a) подачу напруги високої частоти, що підвищудача напруги високої частоти протягом другої стається, до електродів інструмента для зварювання дії включає зміну напруги високої частоти для змітканини протягом першої стадії; ни відносного повного опору тканини за заданою (b) вимірювання значень напруги високої частоти й програмою. електричного струму, що проходить через тканину, 20. Спосіб за п.1, який відрізняється тим, що і тривалості першої стадії; включає модуляцію напруги високої частоти, яку (c) розрахунок значень повного опору тканини діподають протягом першої й другої стадій, імпульленням значень напруги високої частоти на знасами з частотою 100Гц-60кГц і подальшу модулячення електричного струму; цію напруги високої частоти, яку подають протягом (d) визначення мінімального значення повного другої стадії, низькочастотними імпульсами, і далі опору тканини; стабілізацію відносного повного опору тканини на (e) запам'ятовування мінімального значення поврівні відносного повного опору тканини, досягнуного опору тканини; тому наприкінці першої стадії. (f) розрахунок значень відносного повного опору 21. Спосіб за п.20, який відрізняється тим, що тканини діленням значень повного опору тканини частоту вказаних низькочастотних імпульсів вина мінімальне значення повного опору тканини; значають у залежності від тривалості першої ста(g) припинення першої стадії, коли відносний повдії. ний опір тканини досягає кінцевого значення пов22. Спосіб за п.20, який відрізняється тим, що ного опору тканини, розрахованого в залежності частоту низькочастотних імпульсів визначають так, від відносного повного опору тканини; щоб число імпульсів протягом другої стадії дорів(h) запам'ятовування тривалості першої стадії й нювало 5-10. значення напруги високої частоти наприкінці пер23. Спосіб за п.20, який відрізняється тим, що шої стадії; стабілізацію відносного повного опору тканини (і) розрахунок рівня напруги високої частоти для здійснюють системою регулювання. другої стадії у залежності від значення напруги 24. Спосіб за п.23, який відрізняється тим, що високої частоти наприкінці першої стадії; відносний повний опір тканини стабілізують систе(j) розрахунок тривалості другої стадії у залежності мою регулювання, змінюючи напругу високої часвід тривалості першої стадії і тоти на попередньо визначену величину, причому (k) подачу протягом другої стадії напруги високої зміна напруги високої частоти залежить від напрячастоти з рівнем, розрахованим на кроці (і). му зміни відносного повного опору тканини. 31. Спосіб керування зварюванням біологічної 5 77064 6 тканини, що включає: ють у залежності від відносного повного опору (a) подачу напруги високої частоти, що підвищутканини протягом другої стадії. ється, до електродів інструмента для зварювання 33. Спосіб керування зварюванням біологічної тканини протягом першої стадії; тканини, що включає: (b) вимірювання значень напруги високої частоти й (a) подачу напруги високої частоти, що підвищуелектричного струму, що проходить через тканину, ється, до електродів інструмента для зварювання і тривалості першої стадії; тканини протягом першої стадії; (c) розрахунок значень повного опору тканини ді(b) вимірювання значень напруги високої частоти й ленням значень напруги високої частоти на знаелектричного струму, що проходить через тканину, чення електричного струму; і тривалості першої стадії; (d) визначення мінімального значення повного (c) розрахунок значень повного опору тканини діопору тканини; ленням значень напруги високої частоти на зна(e) запам'ятовування мінімального значення повчення електричного струму; ного опору тканини; (d) визначення мінімального значення повного (f) розрахунок значень відносного повного опору опору тканини; тканини діленням значень повного опору тканини (e) запам'ятовування мінімального значення повна мінімальне значення повного опору тканини; ного опору тканини; (g) припинення першої стадії, коли відносний пов(f) розрахунок значень відносного повного опору ний опір тканини досягає кінцевого значення повтканини діленням значень повного опору тканини ного опору тканини, розрахованого в залежності на мінімальне значення повного опору тканини; від відносного повного опору тканини; (g) припинення першої стадії, коли відносний пов(h) запам'ятовування тривалості першої стадії й ний опір тканини досягає кінцевого значення повзначення напруги високої частоти наприкінці перного опору тканини, розрахованого в залежності шої стадії; від відносного повного опору тканини; (і) розрахунок рівня напруги високої частоти для (h) запам'ятовування тривалості першої стадії й другої стадії у залежності від значення напруги значення напруги високої частоти наприкінці первисокої частоти наприкінці першої стадії; шої стадії; (j) розрахунок тривалості другої стадії у залежності (і)розрахунок початкового рівня напруги високої від тривалості першої стадії; частоти для другої стадії у залежності від значен(k) розрахунок частоти модуляції у залежності від ня напруги високої частоти наприкінці першої статривалості першої стадії і дії; (l) подачу протягом другої стадії напруги високої (j) розрахунок тривалості другої стадії у залежності частоти з рівнем напруги високої частоти, розравід тривалості першої стадії; хованим на кроці (і) для тривалості другої стадії, (k) розрахунок частоти модуляції у залежності від розрахованої на кроці (j), і модуляцію напруги витривалості першої стадії і сокої частоти імпульсами з частотою модуляції, (l) подачу протягом другої стадії напруги високої розрахованою на кроці (k). частоти для тривалості другої стадії, розрахованої 32. Спосіб керування зварюванням біологічної на кроці (j), при початковому завданні амплітуди тканини, що включає: напруги високої частоти з початковим рівнем на(a) подачу напруги високої частоти, що підвищупруги високої частоти, розрахованим на кроці (і), ється, до електродів інструмента для зварювання модуляцію напруги високої частоти імпульсами з тканини протягом першої стадії; частотою модуляції, розрахованою на кроці (k), і (b) вимірювання значень напруги високої частоти й зміну амплітуди напруги високої частоти в залежелектричного струму, що проходить через тканину, ності від відносного повного опору тканини. 34. Спосіб за п.33, який відрізняється тим, що і тривалості першої стадії; (c) розрахунок значень повного опору тканини дідодатково включає стабілізацію відносного повноленням значень напруги високої частоти на знаго опору із значенням кінцевого відносного повночення електричного струму; го опору тканини. 35. Спосіб за п.34, який відрізняється тим, що (d) визначення мінімального значення повного опору тканини; стабілізацію відносного повного опору тканини (e) запам'ятовування мінімального значення повздійснюють системою регулювання, яка стабілізує ного опору тканини; відносний повний опір тканини, змінюючи ампліту(f) розрахунок значень відносного повного опору ду імпульсів напруги високої частоти на попередтканини діленням значень повного опору тканини ньо визначену величину, причому напругу високої на мінімальне значення повного опору тканини; частоти змінюють у залежності від зміни відносно(g) припинення першої стадії, коли відносний повго повного опору тканини. 36. Спосіб за п.33, який відрізняється тим, що ний опір тканини досягає кінцевого значення повного опору тканини, розрахованого в залежності зміна відносного повного опору тканини на кроці (l) від відносного повного опору тканини; включає в себе зміну напруги високої частоти для (h) запам'ятовування тривалості першої стадії й зміни відносного повного опору за заданою прозначення напруги високої частоти наприкінці перграмою. шої стадії; 37. Пристрій для зварювання тканини, що містить: (і) розрахунок тривалості другої стадії у залежності хірургічний інструмент, що має електроди, адаптовід тривалості першої стадії і вані для контакту з тканиною, що зварюється, (j) подачу протягом другої стадії напруги високої джерело живлення, підключене до вказаних елекчастоти, причому напругу високої частоти змінютродів для подачі напруги високої частоти, причо 7 77064 8 му вказане джерело живлення містить один або керуючий пристрій має можливість керування декілька датчиків для вимірювання напруги висоджерелом живлення з можливістю модулювання кої частоти й струму між електродами, і керуючий напруги високої частоти, що подаються протягом пристрій, підключений до вказаного джерела живпершої й другої стадій, імпульсами. лення, який відрізняється тим, що керуючий при46. Пристрій за п.45, який відрізняється тим, що стрій має можливість керування джерелом живвказані імпульси мають частоту в межах від 100Гц лення для подачі напруги високої частоти на елекдо 60кГц і коефіцієнт послідовності імпульсів троди протягом першої стадії, контролювання пов10-90%. 47. Пристрій за п.45, який відрізняється тим, що ного опору, визначення мінімального значення повного опору тканини, визначення відносного протягом першої й другої стадій частота імпульсів повного опору тканини як відношення виміряного змінюється. 48. Пристрій за п.37, який відрізняється тим, що повного опору тканини і мінімального значення повного опору тканини, виявлення, коли відносний керуючий пристрій має можливість керування повний опір тканини досягає попередньо визначеджерелом живлення з можливістю модулювання ного значення повного опору тканини протягом напруги високої частоти, що подається протягом першої стадії, і керування джерелом живлення для першої й другої стадій, імпульсами частотою подачі напруги високої частоти протягом другої 100Гц-60кГц і, крім того, модулювання напруги стадії, причому тривалість другої стадії розраховувисокої частоти, що подається протягом другої ється вказаним керуючим пристроєм в залежності стадії, низькочастотними імпульсами. 49. Пристрій за п.48, який відрізняється тим, що від тривалості першої стадії. 38. Пристрій за п.37, який відрізняється тим, що керуючий пристрій має можливість керування керуючий пристрій має можливість керування джерелом живлення з можливістю стабілізації амджерелом живлення для подачі напруги високої плітуди напруги високої частоти, що подається частоти протягом першої стадії таким чином, що протягом другої стадії, причому амплітуда вказаної напруга високої частоти підвищується, причому напруги високої частоти розраховується в залежвказане підвищення напруги високої частоти опиності від значення напруги високої частоти, що сується наступною формулою: подається протягом першої стадії, коли відносний повний опір тканини досягає попередньо визначеU = us tk, де: ного значення відносного повного опору тканини. U - напруга, 50. Пристрій за п.48, який відрізняється тим, що us - постійна, частота вказаних низькочастотних імпульсів виt - час, значена в залежності від тривалості першої стадії. k - постійна, де k < 1. 51. Пристрій за п.48, який відрізняється тим, що 39. Пристрій за п.37, який відрізняється тим, що частота низькочастотних імпульсів визначена так, вказаний керуючий пристрій має можливість розщо число імпульсів протягом другої стадії станорахунку повного опору тканини в залежності від вить від 5 до 10. часу діленням напруги високої частоти на елект52. Пристрій за п.37, який відрізняється тим, що ричний струм. керуючий пристрій має можливість керування 40. Пристрій за п.37, який відрізняється тим, що джерелом живлення з можливістю зміни напруги попередньо визначене значення відносного повновисокої частоти, що подається протягом другої го опору тканини розраховане в залежності від стадії, в залежності від відносного повного опору зміни напруги високої частоти протягом першої тканини. стадії. 53. Пристрій за п.52, який відрізняється тим, що 41. Пристрій за п.37, який відрізняється тим, що керуючий пристрій має можливість керування попередньо визначене значення відносного повноджерелом живлення з можливістю зміни напруги го опору тканини знаходиться в межах від 1 до 1,5. високої частоти протягом другої стадії так, щоб 42. Пристрій за п.37, який відрізняється тим, що стабілізувати відносний повний опір тканини на вказаний керуючий пристрій має можливість розрівні відносного повного опору тканини, досягнурахувати напругу високої частоти, що подається тому наприкінці першої стадії. протягом другої стадії, в залежності від значення 54. Пристрій за п.52, який відрізняється тим, що напруги високої частоти, що подається протягом керуючий пристрій має можливість керувати джепершої стадії, коли відносний повний опір тканини релом живлення з можливістю зміни напруги висодосягає попередньо визначеного значення відноскої частоти, що подається протягом другої стадії, в ного повного опору тканини. залежності від відносного повного опору тканини 43. Пристрій за п.37, який відрізняється тим, що шляхом зниження напруги високої частоти при напруга високої частоти, що подається протягом перевищенні відносним повним опором тканини другої стадії, дорівнює 50-100% значення напруги попередньо визначеного значення відносного поввисокої частоти, що подається протягом першої ного опору тканини й підвищення напруги високої стадії, коли відносний повний опір тканини досягає частоти, коли відносний повний опір тканини менпопередньо визначеного значення відносного повше попередньо визначеного значення відносного ного опору тканини. 44. Пристрій за п.37, який відрізняється тим, що повного опору тканини. 55. Пристрій за п.37, який відрізняється тим, що керуючий пристрій має можливість керування керуючий пристрій має можливість керувати джеджерелом живлення з можливістю стабілізації нарелом живлення для подачі напруги високої часпруги високої частоти, що подається протягом друтоти протягом другої стадії з можливістю регулюгої стадії. вання відносного повного опору тканини. 45. Пристрій за п.37, який відрізняється тим, що 9 77064 10 56. Пристрій за п.37, який відрізняється тим, що мента для зварювання тканини. 65. Пристрій за п.37, який відрізняється тим, що керуючий пристрій має можливість керувати джерелом живлення з можливістю модулювання накеруючий пристрій містить також пристрій для конпруги високої частоти, що подається протягом тролю зварювання тканини й подачі користувачеві першої й другої стадій, імпульсами частотою від сигналу при завершенні зварювання тканини на100Гц до 60кГц і, крім того, модулювання напруги прикінці другої стадії і після того, як зварена ткависокої частоти, що подається протягом другої нина достатньо охолола. 66. Пристрій за п.37, який відрізняється тим, що стадії, низькочастотними імпульсами, а керуючий пристрій має можливість керувати джерелом живкеруючий пристрій містить також пристрій для конлення для подачі напруги високої частоти протятролю зварювання і, якщо повний опір тканини гом другої стадії з можливістю стабілізувати відноперевищує задане значення і (або) тривалість сний повний опір тканини на рівні відносного повпершої стадії перевищує задану тривалість, керуного опору тканини, досягнутому наприкінці перючий пристрій має можливість підтримувати нашої стадії. пругу високої частоти на постійному рівні протягом 57. Пристрій за п.56, який відрізняється тим, що заданого періоду і зупиняти зварювання тканини і частота вказаних низькочастотних імпульсів виподавати сигнал користувачеві, якщо відносний значена в залежності від тривалості першої стадії. повний опір тканини не досяг попередньо визна58. Пристрій за п.56, який відрізняється тим, що ченого значення відносного повного опору тканичастота низькочастотних імпульсів визначена так, ни. 67. Пристрій за п.37, який відрізняється тим, що що число імпульсів протягом другої стадії становить 5-10. керуючий пристрій має можливість керувати дже59. Пристрій за п.56, який відрізняється тим, що релом живлення з можливістю апроксимації накеруючий пристрій містить також систему регулюпруги високої частоти, що поступово підвищується, вання для стабілізації відносного повного опору декількома прямолінійними ділянками. 68. Пристрій за п.37, який відрізняється тим, що тканини. 60. Пристрій за п.59, який відрізняється тим, що керуючий пристрій містить також фільтр для фільсистема регулювання має можливість стабілізуватрування значень повного опору тканини. 69. Пристрій за п.37, який відрізняється тим, що ти відносний повний опір тканини шляхом зміни напруги високої частоти на попередньо визначену керуючий пристрій має можливість керувати тривеличину, причому напруга високої частоти змінювалістю першої стадії у залежності від відносного ється в залежності від напряму зміни відносного повного опору тканини. 70. Пристрій за п.45, який відрізняється тим, що повного опору тканини. 61. Пристрій за п.37, який відрізняється тим, що керуючий пристрій має можливість регулювати керуючий пристрій має можливість керувати джечастоту імпульсів модуляції у межах 100Гц-60кГц релом живлення з можливістю модулювання надля забезпечення мінімального опору тканини. 71. Пристрій за п.45, який відрізняється тим, що пруги високої частоти, що подається протягом першої й другої стадій, імпульсами частотою в керуючий пристрій має можливість регулювати межах від 100Гц до 60кГц і, крім того, модулюванкоефіцієнт послідовності імпульсів модуляції при ня напруги високої частоти, що подається протязварюванні тканини так, що зменшує витрату енегом другої стадії, низькочастотними імпульсами, а ргії на руйнування і нагрів тканини. 72. Пристрій за п.37, який відрізняється тим, що керуючий пристрій має можливість керувати джерелом живлення для подачі напруги високої часкеруючий пристрій має можливість керувати також тоти протягом другої стадії з можливістю регулюджерелом живлення так, що у проміжки часу між вання відносного повного опору тканини. сеансами зварювання подає на електроди пачки 62. Пристрій за п.37, який відрізняється тим, що модульованих імпульсів напруги високої частоти, містить систему регулювання відносного повного причому тривалість пачки імпульсів становить від опору тканини шляхом зміни напруги високої час2 до 15 мс, частота пачки імпульсів становить 3тоти на попередньо визначену величину, причому 15Гц, причому зварювання ініціюється, якщо серенапруга високої частоти змінюється в залежності дній опір між електродами нижче заданого значенвід напряму зміни відносного повного опору тканя. 73. Пристрій за п.37, який відрізняється тим, що нини. 63. Пристрій за п.37, який відрізняється тим, що керуючий пристрій має можливість розраховувати керуючий пристрій містить також пристрій для конпідчас зварювання температуру електродів, темтролю зварювання тканини, припинення зварюпературу тканини, що знаходиться між електродавання тканини й подачі користувачеві сигналу при ми, і міру коагуляції тканини за допомогою матедосягненні напруги високої частоти, що подається матичної моделі на основі відомих значень електпротягом першої стадії, заданого рівня напруги ричного струму й напруги високої частоти. 74. Пристрій за п.73, який відрізняється тим, що високої частоти і (або) недосягненні відносним повним опором тканини попередньо визначеного розраховані значення використані для регулюванзначення відносного повного опору тканини. ня швидкості підвищення напруги високої частоти 64. Пристрій за п.37, який відрізняється тим, що протягом першої стадії й тривалості зварювання керуючий пристрій містить також пристрій для контканини. тролю зварювання тканини й припинення зварю75. Пристрій для зварювання біологічної тканини, вання тканини й подачі користувачеві сигналу при що містить: досягненні повним опором тканини повного опору (а) засіб для подачі напруги високої частоти протяланцюга короткого замикання електродів інстругом першої стадії до електродів інструмента для 11 77064 12 зварювання тканини; 10% до 90%. 85. Пристрій за п.83, який відрізняється тим, що (b) засіб для контролю повного опору тканини й визначення мінімального значення повного опору протягом першої й другої стадій частота імпульсів тканини протягом першої стадії; змінюється. 86. Пристрій за п.75, який відрізняється тим, що (c) засіб для визначення відносного повного опору тканини, причому відносний повний опір тканини містить засіб для модуляції напруги високої частодорівнює відношенню повного опору тканини до ти, що подається протягом першої й другої стадій, мінімального значення повного опору тканини; імпульсами частотою в межах 100Гц-60кГц і, крім (d) засіб для виявлення моменту, коли відносний того, модуляції напруги високої частоти, що подаповний опір тканини досягає попередньо визначеється протягом другої стадії, низькочастотними ного значення повного опору тканини; імпульсами. 87. Пристрій за п.86, який відрізняється тим, що (e) засіб для ініціювання другої стадії при досягненні відносним повним опором тканини попередмістить засіб для стабілізації амплітуди напруги ньо визначеного значення відносного повного оповисокої частоти, що подається протягом другої ру тканини; стадії, а амплітуда вказаної напруги високої часто(f) засіб для розрахунку тривалості другої стадії у ти розрахована в залежності від значення напруги залежності від тривалості першої і високої частоти наприкінці першої стадії. 88. Пристрій за п.86, який відрізняється тим, що (g) засіб для подачі напруги високої частоти протягом другої стадії до електродів інструмента для частота низькочастотних імпульсів визначена в зварювання тканини. залежності від тривалості першої стадії. 76. Пристрій за п.75, який відрізняється тим, що 89. Пристрій за п.86, який відрізняється тим, що амплітуда напруги високої частоти, що подається частота низькочастотних імпульсів визначена так, протягом першої стадії, підвищена за наступною що число імпульсів протягом другої стадії станоформулою: вить 5-10. 90. Пристрій за п.75, який відрізняється тим, що U = us tk, де: засіб для подачі напруги високої частоти протягом U - напруга, другої стадії містить засіб для зміни напруги висоus - постійна, кої частоти в залежності від відносного повного t - час, опору тканини. k - постійна, де k < 1. 91. Пристрій за п.90, який відрізняється тим, що 77. Пристрій за п.75, який відрізняється тим, що містить засіб для стабілізації відносного повного засіб для контролю повного опору тканини містить опору тканини на рівні відносного повного опору засіб для вимірювання напруги високої частоти і тканини, досягнутому наприкінці першої стадії. електричного струму між електродами інструмента 92. Пристрій за п.90, який відрізняється тим, що для зварювання тканини й розрахунку повного напруга високої частоти, що подається протягом опору тканини діленням напруги на електричний другої стадії, змінюється в залежності від відносструм. ного повного опору тканини шляхом зниження на78. Пристрій за п.75, який відрізняється тим, що пруги високої частоти при перевищенні відносним попередньо визначене значення відносного повноповним опором тканини попередньо визначеного го опору тканини розраховане в залежності від значення відносного повного опору тканини й піднапруги високої частоти протягом першої стадії. 79. Пристрій за п.75, який відрізняється тим, що вищення напруги високої частоти, коли відносний повний опір тканини менше попередньо визначепопередньо визначене значення відносного повноного значення відносного повного опору тканини. го опору тканини знаходиться в межах від 1 до 1,5. 93. Пристрій за п.75, який відрізняється тим, що 80. Пристрій за п.75, який відрізняється тим, що засіб для подачі напруги високої частоти протягом напруга високої частоти, що подається протягом другої стадії містить засіб для зміни напруги висодругої стадії, розрахована в залежності від знакої частоти для зміни відносного повного опору чення напруги високої частоти, що подається протканини за заданою програмою. тягом першої стадії, коли відносний повний опір 94. Пристрій за п.75, який відрізняється тим, що тканини досягає попередньо визначеного значенмістить засіб для модуляції напруги високої частоня відносного повного опору тканини. 81. Пристрій за п.75, який відрізняється тим, що ти, що подається протягом першої й другої стадій, імпульсами частотою 100Гц-60кГц і, крім того, монапруга високої частоти, що подається протягом дуляції напруги високої частоти, що подається другої стадії, становить 50-100% значення напруги протягом другої стадії, низькочастотними імпульвисокої частоти, що подається наприкінці першої сами і тим, що містить також засіб для стабілізації стадії. відносного повного опору тканини на рівні віднос82. Пристрій за п.75, який відрізняється тим, що ного повного опору тканини, досягнутому наприкізасіб для подачі напруги високої частоти протягом нці першої стадії. другої стадії містить засіб для стабілізації напруги 95. Пристрій за п.94, який відрізняється тим, що високої частоти, що подається протягом другої частота низькочастотних імпульсів визначена в стадії. 83. Пристрій за п.75, який відрізняється тим, що залежності від тривалості першої стадії. 96. Пристрій за п.94, який відрізняється тим, що містить засіб для модуляції напруги високої часточастота низькочастотних імпульсів визначена так, ти протягом першої й другої стадій імпульсами. що число імпульсів протягом другої стадії дорів84. Пристрій за п.83, який відрізняється тим, що нює 5-10. імпульси мають частоту в межах 100Гц-60кГц, а 97. Пристрій за п.94, який відрізняється тим, що коефіцієнт послідовності імпульсів становить від 13 77064 14 101. Пристрій за п.75, який відрізняється тим, що стабілізація відносного повного опору тканини здійснена засобом системи регулювання. містить засіб для контролю зварювання тканини, 98. Пристрій за п.97, який відрізняється тим, що припинення зварювання тканини й подачі користувказаний засіб системи регулювання має можливачеві сигналу при досягненні напруги високої часвість стабілізувати відносний повний опір тканини тоти, що подається протягом першої стадії, задашляхом зміни напруги високої частоти на попереного рівня напруги високої частоти і (або) недосягдньо визначену величину, причому напруга висоненні відносним повним опором тканини попередкої частоти змінюється в залежності від напряму ньо визначеного значення відносного повного опозміни відносного повного опору тканини. ру тканини. 99. Пристрій за п.75, який відрізняється тим, що 102. Пристрій за п.75, який відрізняється тим, що містить засіб для модуляції напруги високої частомістить засіб для контролю зварювання тканини, ти, що подається протягом першої й другої стадій, припинення зварювання тканини й подачі користуімпульсами частотою 100Гц-60кГц і, крім того, мовачеві сигналу при досягненні повним опором ткадуляції напруги високої частоти, що подається нини повного опору ланцюга короткого замикання протягом другої стадії, низькочастотними імпульелектродів інструмента для зварювання тканини. 103. Пристрій за п.75, який відрізняється тим, що сами і містить засіб для зміни напруги високої частоти для зміни відносного повного опору тканини містить засіб для контролю зварювання тканини й за заданою програмою. подачі користувачеві сигналу при завершенні зва100. Пристрій за п.99, який відрізняється тим, що рювання тканини наприкінці другої стадії і після зміна відносного повного опору тканини здійснена того, як зварена тканина достатньо охолола. засобом системи регулювання. Дана заявка є спорідненою заявці [на патент США №09/022 869 під назвою «Скріплення м'яких біологічних тканин шляхом пропущення через них електричного струму високої частоти», поданої 12 лютого 1998p.], зміст якої посиланням включається в цю заявку. Даний винахід відноситься до скріплення або зварювання м'яких тканин і, зокрема, до способу керування зварюванням тканини і системи для його здійснення. Високочастотний електрохірургічний інструментарій находить широке застосування в медицині для розрізання м'яких тканин, припинення кровотечі і різних процедур припікання. У біполярних електрохірургічних інструментах, що існують в цей час, звичайно використовуються два електроди протилежної полярності, що розміщуються по одному на кожній з протилежних губок, наприклад, затискача. При користуванні цим інструментом тканина утримується між електродами, і між електродами протікає змінний струм високої частоти, нагріваючи тканину. При досягненні температури тканини приблизно 50-55°С, в ній відбувається денатурація альбумінів. Денатурація альбумінів спричиняє «розмотування» глобулярних молекул альбуміну і їх подальше обмотування, що в свою чергу приводить до коагуляції тканин. Після такої обробки тканину можна розрізати в місці зварювання, не викликаючи при цьому кровотечі. Цей процес звичайно називають біполярною електрокоагуляцією. Зварювання тканини звичайно включає у себе зведення кінців розрізу, які потрібно зв'язати, стиснення тканини за допомогою біполярного інструменту і нагрівання тканини протікаючим через неї електричним струмом високої частоти. Одне з основних відмінностей між процедурами зварювання тканин і коагуляцією для припинення кровотечі полягає в тому, що для зварювання тканини необхідні умови, що забезпечують утворення загально го простору альбумінів між тканиною, що зв'язується, до початку коагуляції альбумінів. При відсутності таких умов станеться коагуляція без утворення надійного з'єднання. Проблеми, які можуть виникнути в процесі зварювання тканини, - це теплове ураження прилеглих структур, перегрів тканини і недостатня коагуляція. Перегрів тканини приводить до повільного загоювання, надмірних шрамів, обвуглювання/руйнування тканини і прилипання тканини до електрохірургічного інструмента. При прилипанні тканини до електрохірургічного інструменту вона в місці зварювання може відірватися, що згубно відіб'ється на припиненні кровотечі і викличе нову рану. Недостатня коагуляція може статися в тому випадку, якщо до тканини прикладена недостатня енергія. Недостатня коагуляція приводить до слабких і ненадійних зварних швів тканини і неповного припинення кровотечі. Точне керування процесом зварювання з недопущенням надмірного теплового ураження, перегріву або недостатньої коагуляції - це складний процес, особливо при спробі зварити тканину різної структури, товщини і повного опору. Проблема створення життєздатної автоматичної системи керування особливо важлива при зварюванні, мета якої полягає у відновленні фізіологічних функцій органів, що оперуються. Після припинення кровотечі судини або васкуляризоровані частини тканини, які нагрівалися, звичайно не відновлюються і втрачають функціональні здібності. Зроблені раніше спроби автоматизувати керування коагуляцією тканин принесли надто обмежений успіх. Однією із спроб уникнути перегріву є використання електрохірургічних інструментів із вбудованими пристроями вимірювання температури. Вбудовані пристрої вимірювання температури використовуються для вимірювання температури тканини, забезпечують зворотний зв'язок і тим самим запобігають перегріву. Однак, при викорис 15 77064 16 танні вбудованих датчиків температури електорозатрималось би. Крім того, система і спосіб, що хірургічні інструменти стають громіздкими, даючи пропонуються, забезпечують автоматичну адаптапри цьому лише обмежену або неточну інформацію і керування процесами зварювання і коагуляції цію про стан внутрішніх шарів тканини між електдля тканини різної структури, товщини і (або) повродами, де потенційно повинно утворюватися ного опору без необхідності в настройці обладз'єднання. нання протягом процесів зварювання і коагуляції. Щоб визначити точку, в якій коагуляція закінФіг.1 ілюструє один варіант здійснення причилася і нагрівання тканини необхідно перервати, строю 10, що пропонується, який містить джерело одні автори пропонують різні способи використанживлення 100, до якого підключені електроди 310 ня повного опору тканини і мінімального значення хірургічного інструмента 300. Переважно, джерело повного опору тканин. Інші автори для виявлення живлення виконано таким чином, що може податочки коагуляції пропонують використати залежвати на електроди 310 напругу високої частоти. ність між повним опором тканини і частотою Переважно, джерело живлення 100 містить також струму. один або декілька датчиків для вимірювання наОднак, відомі способи не забезпечують такого пруги високої частоти і струму між електродами розв'язання проблеми скріплення тканин, яке було 310. Як показано на Фіг.1, датчиками переважно є б ефективним для використання в хірургічних продатчик струму 130 і датчик напруги 150. Крім того, цедурах, і, зокрема, не здатні пристосуватися по пристрій 10 містить керуючий пристрій 200. Перевідношенню до різних видів і товщини тканин проважно, керуючий пристрій 200 містить мікропроцетягом процедури зварювання. сор 210, призначений для керування джерелом Виходячи з вищевикладеного, бажано створиживлення 100 для подачі напруги високої частоти ти електрохірургічну систему і спосіб, придатні як на електроди 310 хірургічного інструмента 300. для скріплення тканин, так і для припинення кроХоч керуючий пристрій 200 показано з мікропроцевотечі, які забезпечували б адаптацію до різних сором, керуючий пристрій 200 міг би мати будьвидів, структури, товщини і повного опору тканин який інший тип програмованого пристрою, наприбез перегріву і разом з тим забезпечували б наклад, мікроконтролер, цифровий сигнальний продійне з'єднання тканин. Такі система і спосіб значцесор або набір дискретних логічних пристроїв. но скоротили б час, необхідний для хірургічних Крім того, пристрій 10 може мати включаючий припроцедур, включаючи зварювання тканин, за растрій (не показано), пов'язаний з керуючим прихунок усунення необхідності в настройці обладстроєм 200 і призначений для включення керуючонання протягом процесу зварювання. го пристрою 200 і джерела живлення 100. Крім Приведений вище короткий опис, а також потого, пристрій 10 може мати в якості призначеного дальший докладний опис переважних варіантів для користувача інтерфейсу панель керування або здійснення винаходу стануть зрозумілі, якщо їх дисплей (не показані). читати разом з прикладеними кресленнями. Для Керуючий пристрій 200 переважно адаптовано ілюстрації винаходу, на цих кресленнях показані для наступних цілей: керування джерелом живваріанти здійснення, яким в цей час віддається лення 100 для подачі напруги високої частоти на перевага. Слід, однак, розуміти, що показаними електроди 310 протягом першої стадії; контроль конкретними пристроями і інструментарієм даний повного опору тканини між електродами 310; вивинахід не обмежується. значення мінімального значення повного опору Фіг.1 являє собою блок-схему, що ілюструє тканини; визначення відносного повного опору один варіант здійснення даного винаходу; тканини як відношення виміряного повного опору на Фіг.2 показано графік зміни напруги за чатканини до мінімального значення повного опору сом, що подається протягом першої стадії, для тканини; виявлення, коли відносний повний опір одного варіанту здійснення винаходу; тканини досягає попередньо визначеного значенФіг.3 являє собою графік зміни напруги за чаня повного опору тканини протягом першої стадії сом, повного опору тканини і відносного повного (попередньо визначене значення повного опору опору тканини протягом першої і другої стадій ще тканини задається або розраховується в залежнодля одного варіанту здійснення винаходу; сті від зміни напруги високої частоти протягом Фіг.4 являє собою графік зміни напруги за чапершої стадії); і керування джерелом живлення сом і повного опору тканини протягом першої і для подачі напруги високої частоти протягом друдругої стадій ще для одного варіанту здійснення гої стадії. винаходу; Переважно, керуючий пристрій 200 керує джеФіг.5 являє собою графік зміни напруги за чарелом живлення 100 для подачі напруги високої сом, повного опору тканини і відносного повного частоти протягом першої стадії таким чином, що опору тканини протягом першої і другої стадій ще напруга високої частоти підвищується із швидкісдля одного варіанту здійснення винаходу; тю, що поступово знижується (наприклад, з швидФіг.6 являє собою графік зміни напруги за чакістю підвищення напруги, що знижується у часі сом, повного опору тканини і відносного повного високої частоти). По одному переважному варіанту опору тканини протягом першої і другої стадій ще здійснення, підвищення напруги високої частоти для одного варіанту здійснення винаходу. описується наступною формулою: Даний винахід може знайти застосування в U=us tk, самих різних медичних процедурах, в тому числі де U - напруга, us - постійна, t - час і k - постійпри з'єднанні або скріпленні тканини, для отрина, і де k
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for welding of biological tissue, method for control of welding (variants) and device for welding of biological tissue (variants)
Назва патенту російськоюСпособ сварки биологической ткани, способ управления сваркой биологической ткани (варианты) и устройство для сварки биологической ткани (варианты)
МПК / Мітки
МПК: A61B 18/18, A61B 18/12
Мітки: зварюванням, біологічно, тканини, зварювання, керування, спосіб, варіанти, пристрій
Код посилання
<a href="https://ua.patents.su/14-77064-sposib-zvaryuvannya-biologichno-tkanini-sposib-keruvannya-zvaryuvannyam-biologichno-tkanini-varianti-i-pristrijj-dlya-zvaryuvannya-biologichno-tkanini-varianti.html" target="_blank" rel="follow" title="База патентів України">Спосіб зварювання біологічної тканини, спосіб керування зварюванням біологічної тканини (варіанти) і пристрій для зварювання біологічної тканини (варіанти)</a>
Медичний пристрій для введення твердих матеріалів під поверхню біологічної тканини (варіанти)
Номер патенту: 47499
Опубліковано: 15.07.2002
Автори: Гест Майкл Джей, Міллер Нейл Уоррінер, Петтон Джон Матір
МПК: A61M 37/00, A61M 5/46
Мітки: поверхню, тканини, матеріалів, введення, біологічно, варіанти, твердих, медичний, пристрій
Формула / Реферат:
1. Медичний пристрій для розміщення твердого матеріалу в або під поверхнею біологічної тканини, що містить корпус, трубчастий елемент, який має дистальний кінець і проксимальний кінець і який проходить від дистального кінця корпуса, циліндричний канал, який проходить коаксіально крізь корпус і трубчастий елемент і який має достатні внутрішні розміри для збереження і проходження твердого матеріалу, який підлягає розміщенню, який відрізняється...
Пристрій для стимуляції м’язової тканини за допомогою хвиль двофазної форми
Номер патенту: 66384
Опубліковано: 17.05.2004
Автор: Моуер Мортон М.
МПК: A61N 1/36, A61N 1/362
Мітки: пристрій, хвиль, стимуляції, допомогою, двофазної, тканини, м'язової, форми
Формула / Реферат:
1. Пристрій для стимуляції м'язової тканини за допомогою хвиль двофазної форми, який відрізняється тим, що він містить:електронний пристрій для створення імпульсів, причому імпульс включає першу фазу стимуляції і другу фазу стимуляції, при цьому перша фаза стимуляції має полярність, амплітуду, форму і тривалість першої фази та служить для підготовки м'язової тканини до сприйняття наступної стимуляції, а друга фаза стимуляції має...
Спосіб керування рівнями потужності передачі (варіанти), спосіб передачі (варіанти) і пристрій для його здійснення
Номер патенту: 65655
Опубліковано: 15.04.2004
Автори: Разумов Леонід, Ландбі Стайн А.
МПК: H04B 7/005
Мітки: варіанти, пристрій, керування, рівнями, здійснення, спосіб, передачі, потужності
Формула / Реферат:
1.Спосіб керування рівнями потужності передачі багатьох потоків даних від щонайменше одної базової станції до мобільної станції у системі мобільного радіотелефонного зв’язку, який включає операції:а) передачі першого потоку даних від щонайменше одної базової станції до мобільної станції і передачі другого потоку даних від щонайменше одної базової станції до мобільної станції,б) прийому першого і другого потоків даних мобільною...
Пристрій для опромінювання біологічної речовини (варіанти)
Номер патенту: 74144
Опубліковано: 15.11.2005
Автор: Джеймс Роберт Дж.
Мітки: пристрій, біологічно, варіанти, речовини, опромінювання
Формула / Реферат:
1. Пристрій для опромінювання біологічної речовини вибраним спектром частот, який має :- вакуумну трубку загальної подовженої циліндричної форми, корпус якої виконано з прозорого матеріалу;- анод, встановлений у одному кінці трубки;- катод, встановлений у другому кінці трубки;- трубчастий електропровідний екран, який оточує першу частину трубки поблизу анода і електрично з'єднаний з ним;- відбиваючу...
Спосіб одержання вільних амінокислот з біологічної тканини
Номер патенту: 40202
Опубліковано: 16.07.2001
Автори: Михайличенко Борис Валентинович, Мельниченко Валентин Петрович
МПК: C07C 227/00, C07C 229/00, C07C 65/00
Мітки: біологічно, вільних, амінокислот, спосіб, одержання, тканини
Формула / Реферат:
Cпосіб одержання вільних амінокислот з біологічної тканини шляхом подрібнення тканини, обробки сульфосаліциловою кислотою, центрифугування з наступним вилученням цільового продукту, який відрізняється тим, що тканину перед подрібненням висушують при температурі 60-70° С, а після подрібнення зважують та екстрагують у буферному розчині при фізіологічному значенні рН та температурі 70° С на протязі 2 годин.
Попередній патент: Система контролю і керування рухомими та стаціонарними об’єктами
Наступний патент: Декоративна композиційна деталь та спосіб її одержання
Випадковий патент: Спосіб формування і передачі сигналів (варіанти)