Універсальна електромеханічна реабілітаційна установка з модульними приводами
Номер патенту: 99583
Опубліковано: 27.08.2012
Автори: Петоян Володимир Каренович, Васильєв Валерій Валентинович, Гончарук Антон Антонович, Беліков Віктор Тріфонович, Петоян Карен Володимирович
Формула / Реферат
1. Універсальна електромеханічна реабілітаційна установка з модульними приводами, що складається з одного або декількох основних функціональних блоків-модулів у вигляді лінійних електричних приводів, у яких виконавчі рухомі силові органи, що несуть фіксатори кінцівок пацієнта, що розроблюються, можуть бути виконані у вигляді укорочених активних конструктивних елементів лінійних електродвигунів, що несуть якірні обмотки управління, підключені до зовнішнього джерела електричної енергії, або як активні або пасивні подовжені шляхові структури, і допоміжних функціональних електромеханічних блоків-модулів з серводвигунами, яка відрізняється тим, що основу кожного з пари приводних лінійних електричних двигунів, що входять до складу реабілітаційної установки, встановлено з можливістю повороту в горизонтальній площині на опорах кочення, що самовстановлюються, забезпечено гайкою кочення прецизійної механічної пари "гвинт - гайка кочення", обертальний гвинт кожної з яких закріплений на роторі серводвигуна обертального типу, причому корпус гайки кочення закріплений з можливістю повороту на вертикальній осі, встановленій на основі приводного лінійного двигуна, а корпус серводвигуна, відповідно, закріплений з можливістю повороту на вертикальній осі, встановленій на загальній нерухомій основі реабілітаційної установки.
2. Універсальна електромеханічна реабілітаційна установка з модульними приводами за п. 1, яка відрізняється тим, що на виконавчих рухомих силових органах приводних лінійних електродвигунів встановлені вакуумні фіксатори кінцівок пацієнта, що розроблюються, які виконані у вигляді еластичних ємкостей, заповнених сипкою масою з дрібних твердих гранульованих частинок довільної форми і забезпечених гнучкими трубопроводами для з'єднання з вакуум-насосами і зовнішнім середовищем.
3. Універсальна електромеханічна реабілітаційна установка з модульними приводами за пп. 1 і 2, яка відрізняється тим, що еластичні ємкості вакуумних фіксаторів кінцівок пацієнта, що розроблюються, закріплені на рухомих елементах лінійних двигунів за допомогою сферичного шарнірного з'єднання.
Текст
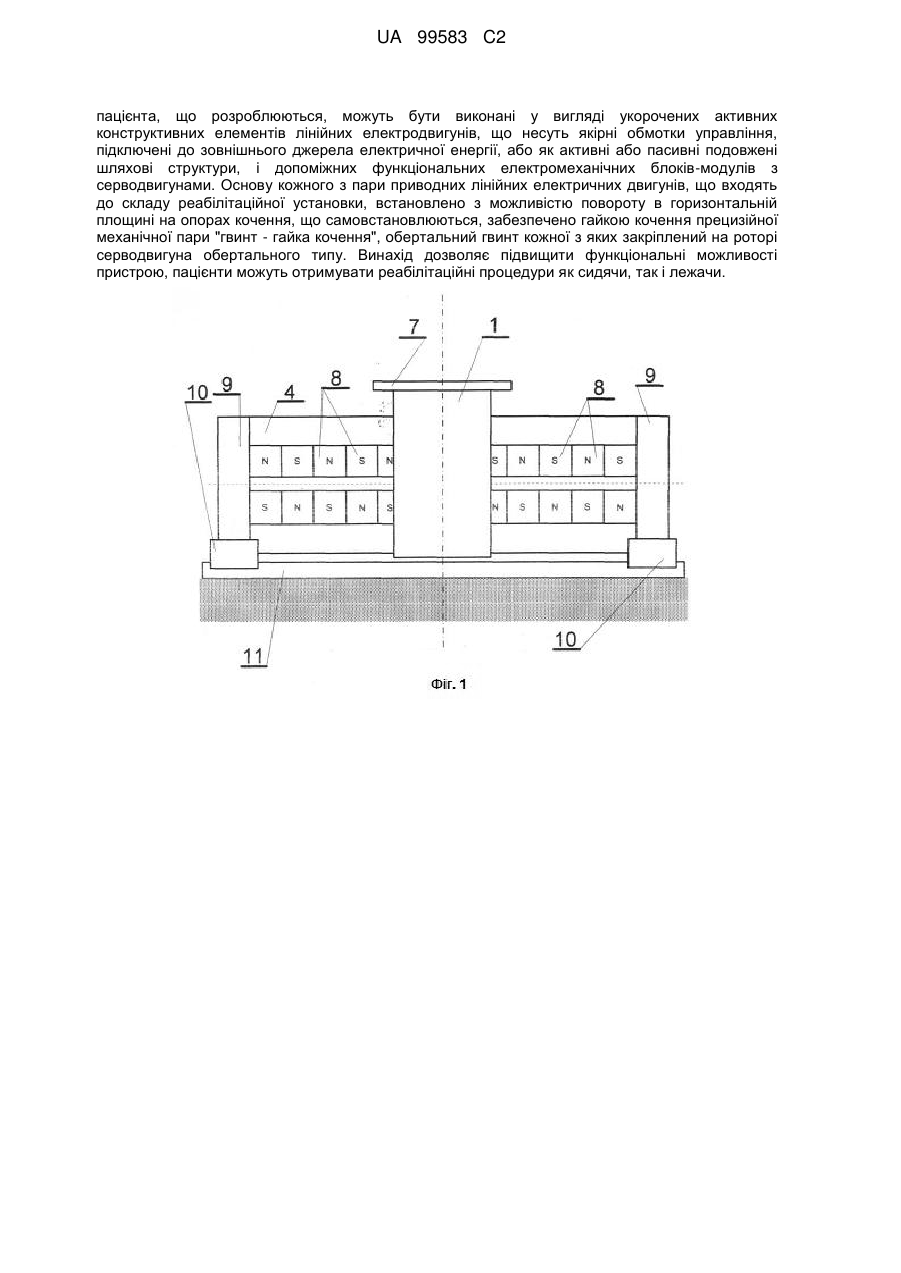
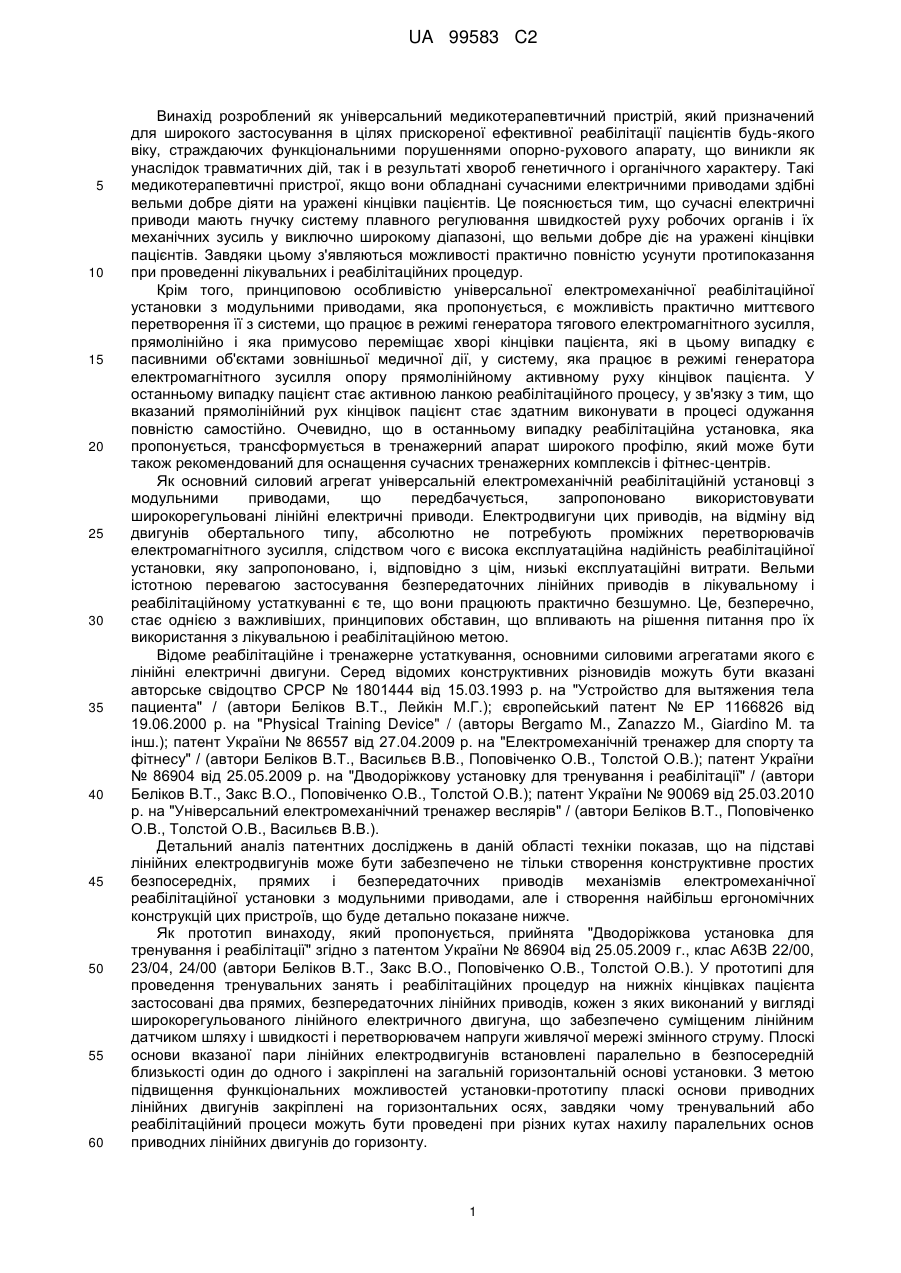
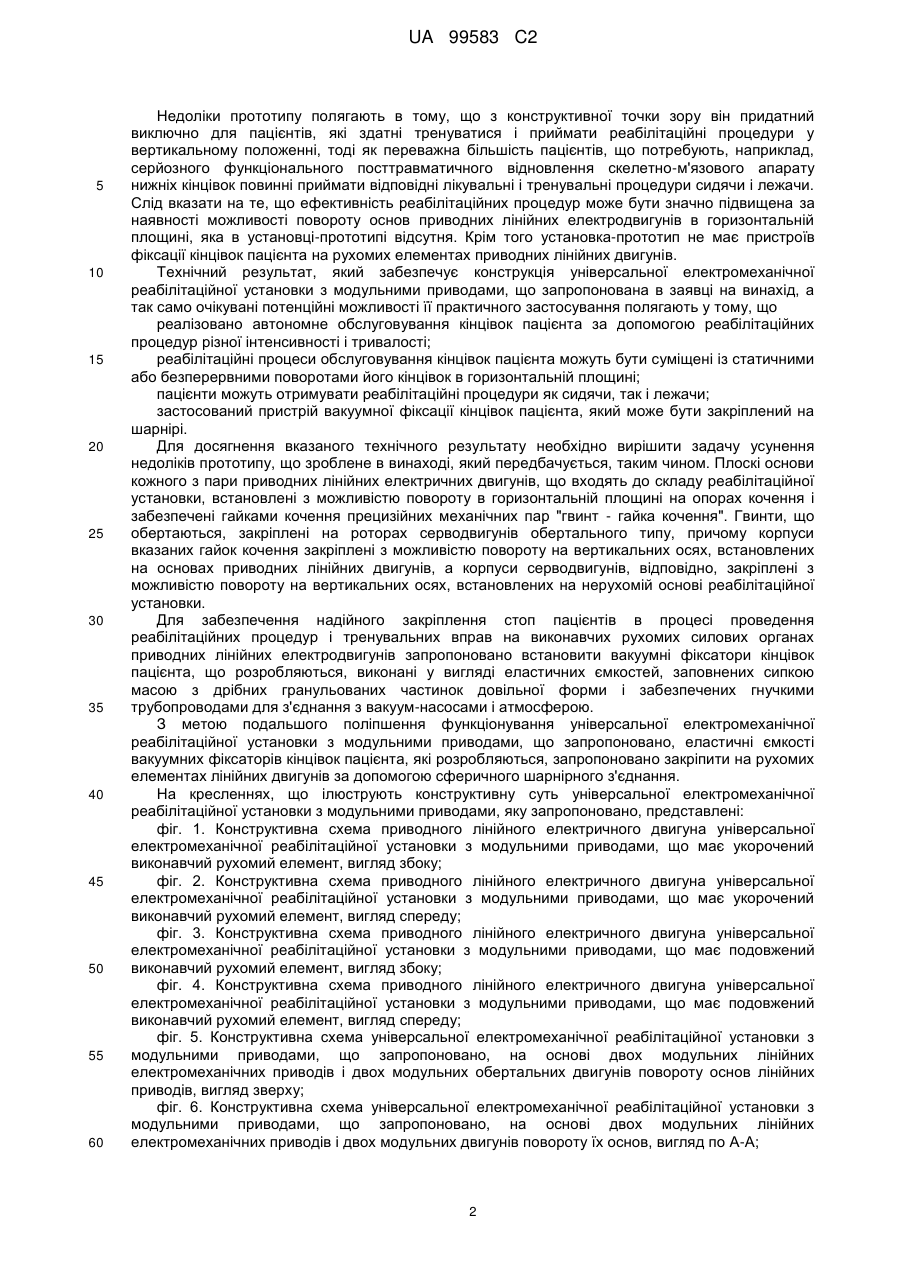
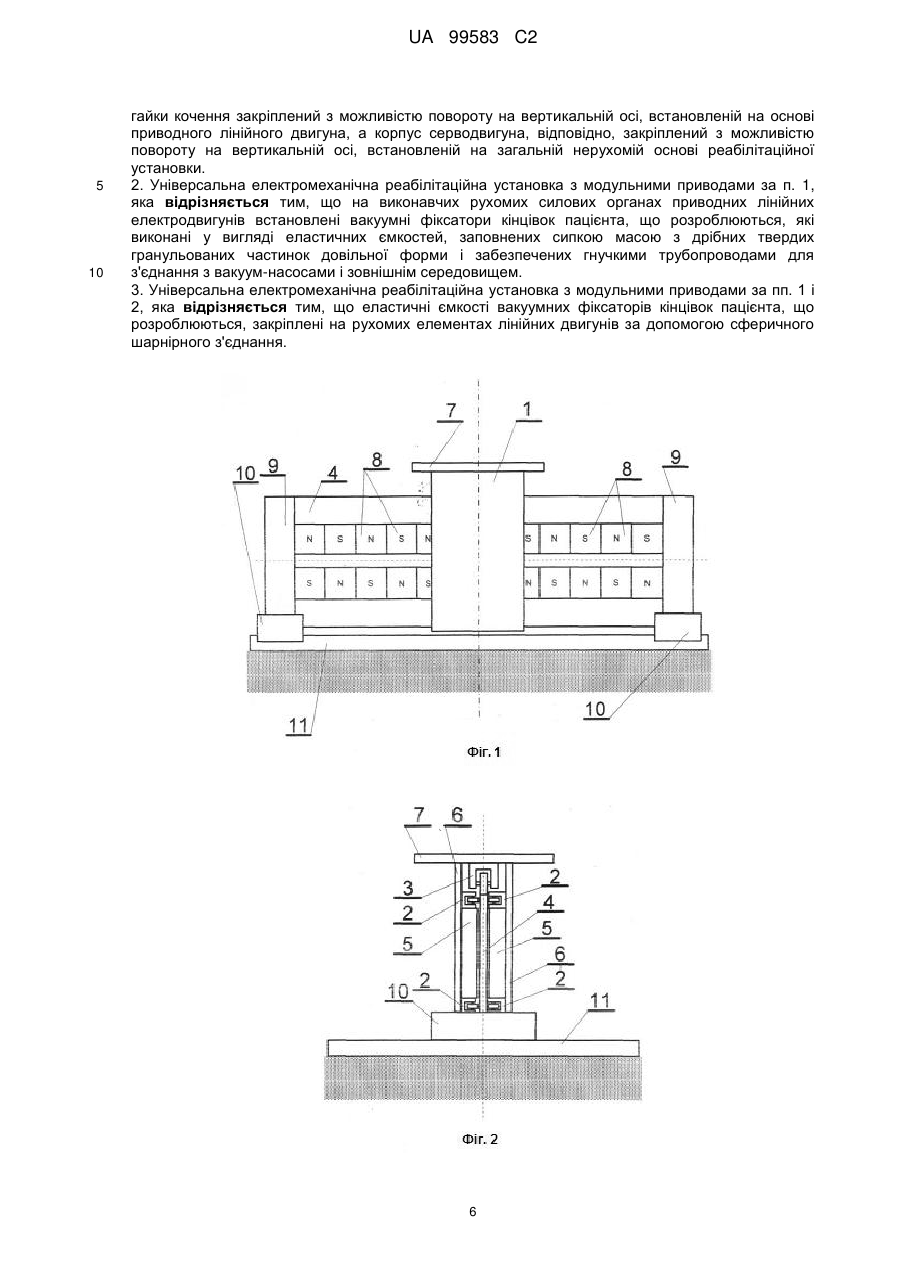
Реферат: Універсальна електромеханічна реабілітаційна установка з модульними приводами призначена для застосування як медикотерапевтичного пристрою широкого профілю. Установка складається з одного або декількох основних функціональних блоків-модулів у вигляді лінійних електричних приводів, у яких виконавчі рухомі силові органи, що несуть фіксатори кінцівок UA 99583 C2 (12) UA 99583 C2 пацієнта, що розроблюються, можуть бути виконані у вигляді укорочених активних конструктивних елементів лінійних електродвигунів, що несуть якірні обмотки управління, підключені до зовнішнього джерела електричної енергії, або як активні або пасивні подовжені шляхові структури, і допоміжних функціональних електромеханічних блоків-модулів з серводвигунами. Основу кожного з пари приводних лінійних електричних двигунів, що входять до складу реабілітаційної установки, встановлено з можливістю повороту в горизонтальній площині на опорах кочення, що самовстановлюються, забезпечено гайкою кочення прецизійної механічної пари "гвинт - гайка кочення", обертальний гвинт кожної з яких закріплений на роторі серводвигуна обертального типу. Винахід дозволяє підвищити функціональні можливості пристрою, пацієнти можуть отримувати реабілітаційні процедури як сидячи, так і лежачи. UA 99583 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід розроблений як універсальний медикотерапевтичний пристрій, який призначений для широкого застосування в цілях прискореної ефективної реабілітації пацієнтів будь-якого віку, страждаючих функціональними порушеннями опорно-рухового апарату, що виникли як унаслідок травматичних дій, так і в результаті хвороб генетичного і органічного характеру. Такі медикотерапевтичнi пристрої, якщо вони обладнані сучасними електричними приводами здібні вельми добре діяти на уражені кінцівки пацієнтів. Це пояснюється тим, що сучасні електричні приводи мають гнучку систему плавного регулювання швидкостей руху робочих органів і їх механічних зусиль у виключно широкому діапазоні, що вельми добре діє на уражені кінцівки пацієнтів. Завдяки цьому з'являються можливості практично повністю усунути протипоказання при проведенні лікувальних і реабілітаційних процедур. Крім того, принциповою особливістю універсальної електромеханічної реабілітаційної установки з модульними приводами, яка пропонується, є можливість практично миттєвого перетворення її з системи, що працює в режимі генератора тягового електромагнітного зусилля, прямолінійно і яка примусово переміщає хворі кінцівки пацієнта, які в цьому випадку є пасивними об'єктами зовнішньої медичної дії, у систему, яка працює в режимі генератора електромагнітного зусилля опору прямолінійному активному руху кінцівок пацієнта. У останньому випадку пацієнт стає активною ланкою реабілітаційного процесу, у зв'язку з тим, що вказаний прямолінійний рух кінцівок пацієнт стає здатним виконувати в процесі одужання повністю самостійно. Очевидно, що в останньому випадку реабілітаційна установка, яка пропонується, трансформується в тренажерний апарат широкого профілю, який може бути також рекомендований для оснащення сучасних тренажерних комплексів і фітнес-центрів. Як основний силовий агрегат універсальній електромеханічній реабілітаційній установці з модульними приводами, що передбачується, запропоновано використовувати широкорегульовані лінійні електричні приводи. Електродвигуни цих приводів, на відміну від двигунів обертального типу, абсолютно не потребують проміжних перетворювачів електромагнітного зусилля, слідством чого є висока експлуатаційна надійність реабілітаційної установки, яку запропоновано, і, відповідно з цім, низькі експлуатаційні витрати. Вельми істотною перевагою застосування безпередаточних лінійних приводів в лікувальному і реабілітаційному устаткуванні є те, що вони працюють практично безшумно. Це, безперечно, стає однією з важливіших, принципових обставин, що впливають на рішення питання про їх використання з лікувальною і реабілітаційною метою. Відоме реабілітаційне і тренажерне устаткування, основними силовими агрегатами якого є лінійні електричні двигуни. Серед відомих конструктивних різновидів можуть бути вказані авторське свідоцтво СРСР № 1801444 від 15.03.1993 р. на "Устройство для вытяжения тела пациента" / (автори Беліков В.Т., Лейкін М.Г.); європейський патент № ЕР 1166826 від 19.06.2000 р. на "Physical Training Device" / (aвтоpы Bergamo M., Zanazzo M., Giardino M. та інш.); патент України № 86557 від 27.04.2009 р. на "Електромеханічній тренажер для спорту та фітнесу" / (автори Беліков В.Т., Васильєв В.В., Поповіченко О.В., Толстой О.В.); патент України № 86904 від 25.05.2009 р. на "Дводоріжкову установку для тренування і реабілітації" / (автори Беліков В.Т., Закс В.О., Поповіченко О.В., Толстой О.В.); патент України № 90069 від 25.03.2010 р. на "Універсальний електромеханічний тренажер веслярів" / (автори Беліков В.Т., Поповіченко О.В., Толстой О.В., Васильєв В.В.). Детальний аналіз патентних досліджень в даній області техніки показав, що на підставі лінійних електродвигунів може бути забезпечено не тільки створення конструктивне простих безпосередніх, прямих і безпередаточних приводів механізмів електромеханічної реабілітаційної установки з модульними приводами, але і створення найбільш ергономічних конструкцій цих пристроїв, що буде детально показане нижче. Як прототип винаходу, який пропонується, прийнята "Дводоріжкова установка для тренування і реабілітації" згідно з патентом України № 86904 від 25.05.2009 г., клас А63В 22/00, 23/04, 24/00 (автори Беліков В.Т., Закс В.О., Поповіченко О.В., Толстой О.В.). У прототипі для проведення тренувальних занять і реабілітаційних процедур на нижніх кінцівках пацієнта застосовані два прямих, безпередаточних лінійних приводів, кожен з яких виконаний у вигляді широкорегульованого лінійного електричного двигуна, що забезпечено суміщеним лінійним датчиком шляху і швидкості і перетворювачем напруги живлячої мережі змінного струму. Плоскі основи вказаної пари лінійних електродвигунів встановлені паралельно в безпосередній близькості один до одного і закріплені на загальній горизонтальній основі установки. З метою підвищення функціональних можливостей установки-прототипу пласкі основи приводних лінійних двигунів закріплені на горизонтальних осях, завдяки чому тренувальний або реабілітаційний процеси можуть бути проведені при різних кутах нахилу паралельних основ приводних лінійних двигунів до горизонту. 1 UA 99583 C2 5 10 15 20 25 30 35 40 45 50 55 60 Недоліки прототипу полягають в тому, що з конструктивної точки зору він придатний виключно для пацієнтів, які здатні тренуватися і приймати реабілітаційні процедури у вертикальному положенні, тоді як переважна більшість пацієнтів, що потребують, наприклад, серйозного функціонального посттравматичного відновлення скелетно-м'язового апарату нижніх кінцівок повинні приймати відповідні лікувальні і тренувальні процедури сидячи і лежачи. Слід вказати на те, що ефективність реабілітаційних процедур може бути значно підвищена за наявності можливості повороту основ приводних лінійних електродвигунів в горизонтальній площині, яка в установці-прототипі відсутня. Крім того установка-прототип не має пристроїв фіксації кінцівок пацієнта на рухомих елементах приводних лінійних двигунів. Технічний результат, який забезпечує конструкція універсальної електромеханічної реабілітаційної установки з модульними приводами, що запропонована в заявці на винахід, а так само очікувані потенційні можливості її практичного застосування полягають у тому, що реалізовано автономне обслуговування кінцівок пацієнта за допомогою реабілітаційних процедур різної інтенсивності і тривалості; реабілітаційні процеси обслуговування кінцівок пацієнта можуть бути суміщені із статичними або безперервними поворотами його кінцівок в горизонтальній площині; пацієнти можуть отримувати реабілітаційні процедури як сидячи, так і лежачи; застосований пристрій вакуумної фіксації кінцівок пацієнта, який може бути закріплений на шарнірі. Для досягнення вказаного технічного результату необхідно вирішити задачу усунення недоліків прототипу, що зроблене в винаході, який передбачується, таким чином. Плоскі основи кожного з пари приводних лінійних електричних двигунів, що входять до складу реабілітаційної установки, встановлені з можливістю повороту в горизонтальній площині на опорах кочення і забезпечені гайками кочення прецизійних механічних пар "гвинт - гайка кочення". Гвинти, що обертаються, закріплені на роторах серводвигунів обертального типу, причому корпуси вказаних гайок кочення закріплені з можливістю повороту на вертикальних осях, встановлених на основах приводних лінійних двигунів, а корпуси серводвигунів, відповідно, закріплені з можливістю повороту на вертикальних осях, встановлених на нерухомій основі реабілітаційної установки. Для забезпечення надійного закріплення стоп пацієнтів в процесі проведення реабілітаційних процедур і тренувальних вправ на виконавчих рухомих силових органах приводних лінійних електродвигунів запропоновано встановити вакуумні фіксатори кінцівок пацієнта, що розробляються, виконані у вигляді еластичних ємкостей, заповнених сипкою масою з дрібних гранульованих частинок довільної форми і забезпечених гнучкими трубопроводами для з'єднання з вакуум-насосами і атмосферою. З метою подальшого поліпшення функціонування універсальної електромеханічної реабілітаційної установки з модульними приводами, що запропоновано, еластичні ємкості вакуумних фіксаторів кінцівок пацієнта, які розробляються, запропоновано закріпити на рухомих елементах лінійних двигунів за допомогою сферичного шарнірного з'єднання. На кресленнях, що ілюструють конструктивну суть універсальної електромеханічної реабілітаційної установки з модульними приводами, яку запропоновано, представлені: фіг. 1. Конструктивна схема приводного лінійного електричного двигуна універсальної електромеханічної реабілітаційної установки з модульними приводами, що має укорочений виконавчий рухомий елемент, вигляд збоку; фіг. 2. Конструктивна схема приводного лінійного електричного двигуна універсальної електромеханічної реабілітаційної установки з модульними приводами, що має укорочений виконавчий рухомий елемент, вигляд спереду; фіг. 3. Конструктивна схема приводного лінійного електричного двигуна універсальної електромеханічної реабілітаційної установки з модульними приводами, що має подовжений виконавчий рухомий елемент, вигляд збоку; фіг. 4. Конструктивна схема приводного лінійного електричного двигуна універсальної електромеханічної реабілітаційної установки з модульними приводами, що має подовжений виконавчий рухомий елемент, вигляд спереду; фіг. 5. Конструктивна схема універсальної електромеханічної реабілітаційної установки з модульними приводами, що запропоновано, на основі двох модульних лінійних електромеханічних приводів і двох модульних обертальних двигунів повороту основ лінійних приводів, вигляд зверху; фіг. 6. Конструктивна схема універсальної електромеханічної реабілітаційної установки з модульними приводами, що запропоновано, на основі двох модульних лінійних електромеханічних приводів і двох модульних двигунів повороту їх основ, вигляд по А-А; 2 UA 99583 C2 5 10 15 20 25 30 35 40 45 50 55 60 фіг. 7. Конструктивна схема вакуумного фіксатора стопи пацієнта, еластична камера якого заповнена гранулами (частками) довільних просторових форм, перед установкою об'єкта фіксації, поперечний розріз; фіг. 8. Конструктивна схема вакуумного фіксатора стопи пацієнта, еластична камера якого заповнена твердими гранулами (частками) довільних просторових форм, зі встановленим об'єктом фіксації довільної форми, поперечний розріз; фіг. 9. Дизайн вакуумного фіксатора стопи пацієнта у вільному стані, поперечний розріз; фіг. 10. Дизайн вакуумного фіксатора стопи з показом механізму фіксації стопи пацієнта при викачуванні повітря з еластичної камери фіксатора, поперечний розріз; фіг. 11. Дизайн вакуумного фіксатора стопи пацієнта, що встановлений на виконавчому рухомому елементі тренажера на сферичному шарнірі і що знаходиться у вільному стані, поперечний розріз: фіг. 12. Дизайн вакуумного фіксатора стопи пацієнта, встановленого з нахилом на забезпеченому сферичним шарніром виконавчому рухомому елементі тренажера при вакуумній фіксації стопи пацієнта, поперечний розріз; фіг. 13 Дизайн загального виду універсальної електромеханічної реабілітаційної установки з модульними приводами, що запропоновано, в процесі обслуговування пацієнта; фіг. 14 Конструктивна схема фіг. 13 у вигляді зверху. На фігурах 1 і 2 представлене одне з можливих конструктивних виконань блока-модуля приводного лінійного електричного двигуна, який призначено для використання в широкорегульованих лінійних модульних електроприводах універсальної електромеханічної реабілітаційної установки з модульними приводами, яку запропоновано. Принципова особливість цього варіанта конструктивного виконання тягового лінійного електродвигуна є те, що його виконавчий рухомий елемент 1 є укороченим функціональним блоком-модулем, що несе якірну обмотку управління, яка на фігурах 1 і 2 не показана. Вказаний виконавчий рухомий елемент 1 забезпечений комплектом опор кочення 2 і 3, на яких він переміщається уздовж протяжної шляхової структури 4. Підведення електричного живлення до якірних обмоток рухомого елементу 1 проводиться за допомогою гнучкого електричного кабелю, який так само, як і якірна обмотка управління, не вказаний окремою позицією на фігурах 2 і 3. Якірні обмотки управління розміщені на магнітопроводах 5, що жорстко закріплені на бічних стінках 6 рухомого елементу 1. Бічні стінки блок-модуля 1 закріплені на горизонтальній монтажній пластині 7, на якій встановлені опори кочення 3. Шляхова структура 4 забезпечена комплектом постійних магнітів 8, яки збуджують основного магнітного поля лінійного тягового електродвигуна. Вона закріплена на двох вертикальних бічних стійках 9, які, у свою чергу, встановлені на монтажних опорах 10. Останні служать для кріплення лінійного приводу до основи тренажера 11. Як певний експлуатаційний недолік конструкції тягового лінійного електродвигуна, що описано вище, є необхідність підведення електричного живлення до постійно рухомого в ході реабілітаційного процесу активного виконавчого елементу за допомогою гнучкого кабельного з'єднання. Цей недолік може бути усунений при розміщенні якірної обмотки управління на подовженому нерухомому елементі - шляховій структурі 4. Тоді на рухомій частині 1 повинні бути встановлені постійні магніти збудження основного магнітного поля, які, як повністю очевидно, не потребують підключення до зовнішнього джерела електропостачання. Разом з тим тут слід вказати на ту істотну обставину, що в даний час промисловість освоїла випуск спеціалізованих гнучких електричних кабельних систем гусеничного типу для підведення електроживлення до рухомих елементів різноманітних систем технологічного устаткування. Такі електричні гнучкі кабелі здатні постійно забезпечувати виключно високий рівень експлуатаційної надійності. На фігурах 3 і 4 представлений другий з двох можливих конструктивних виконань різновид тягового лінійного електродвигуна, що відрізняється від першого тим, що тут як рухомий елемент використана рухома подовжена шляхова структура 4, на якій закріплений комплект постійних магнітів 8 збудження основного магнітного поля лінійного двигуна. Нерухомий функціональний блок-модуль 1 жорстко закріплений на монтажному елементі 12. Блок-модуль 1 включає два магнітопроводи 5, що несуть якірну обмотку управління, яка на фігурах 3 і 4 не показана. Тут якірна обмотка лінійного електродвигуна нерухома, унаслідок чого її підключення до живильної мережі електропостачання значно надійніше в порівнянні з попереднім випадком. Магнітопроводи 5 забезпечено комплектом опор 2 кочення, а на монтажному елементі 12 встановлена пара опор 3 кочення. Завдяки комплекту опор 2 і 3 кочення шляхова структура 4 має можливість вільного переміщення уздовж подовжньої осі пропонованого універсального реабілітаційного тренажера з модульними електромеханічними приводами. На горизонтальної 3 UA 99583 C2 5 10 15 20 25 30 35 40 45 50 55 60 площадці 7, яку жорстко закріплено на рухомій шляховій структурі 4, встановлюється фіксатор кінцівки пацієнта, що реабілітується, на фігурах 3 і 4 не показаний. На фігурах 5 і 6 у видах зверху і по А-А представлена конструктивна схема універсальної електромеханічної реабілітаційної установки з модульними приводами, яку запропоновано, на підставі двох модульних лінійних електромеханічних приводів і двох двигунів повороту їх основ 11, що обертаються, в горизонтальній площині. Основи 11 двох лінійних електричних приводів забезпечені комплектами опор 13 кочень, що самовстановлюються, і горизонтальними кільцями 14, завдяки яким основи 11 можуть бути повернені, в загальному випадку, на довільні кути 1 і 2 у горизонтальній площині на загальній основі 15 запропонованої універсальної електромеханічної реабілітаційної установки з модульними приводами щодо центрів нерухомих вертикальних стрижнів 16, закріплених на загальній основі 15. Для реалізації повороту основ 11 лінійних електричних приводів запропоновано встановити з можливістю повороту навколо вертикальної осі на загальній основі 15 корпуси 17 двох електродвигунів обертального типу. З цією метою корпуси 17 вказаних двигунів закріплено з можливістю повороту на вертикальних осях 18, які жорстко встановлені на загальній основі 15. Це жорстко обмежує характер руху основ 11 на загальної основі 15 установки. На осях роторів двигунів, що обертаються, закріплені гвинти 19 двох прецизійних кінематичних шарико- або роликогвинтових передач типу "гвинт - гайка кочення", які самостійно гальмуються. Корпуси 20 гайок цих передач закріплено з можливістю повороту навколо вертикальних осей 21 на підставах 11 лінійних приводів. Пацієнт, що має за висновку фахівців потребу у реабілітаційних процедурах, розміщується в лікувальному кріслі 22. Стопа його кінцівці перед початком процедури фіксується на спеціальному механізмі, для розміщення якого служить монтажна деталь 23, що встановлена на горизонтальній монтажній пластині 7 рухомого елементу лінійного приводу. Самі механізми фіксації кінцівок пацієнта на фігурах 5 і 6 не показані. Аналіз конструктивних особливостей реабілітаційної установки, яка представлена на фігурах 5 і 6, показав, що вона має набагато вищі, порівняно з існуючими зразками подібної техніки і прототипом, функціональні можливості розширення номенклатури реабілітаційних і тренажерних процедур. Це, в першу чергу, пояснюється тим, що на пропонованій в справжній заявці на видачу патенту установці вперше стало можливим, наприклад, проведення автономних, таких, що відрізняються один від одного по фізіологічній дії реабілітаційних і тренажерних процедур одночасно на двох нижніх кінцівках пацієнта. Повністю очевидно, що подібне розширення спектру вказаних процедур сприяє адекватному підвищенню ефективності реабілітаційного процесу, що забезпечує значну економію об'єму соціальних виплат. Тут слід взяти до уваги, що згідно даним медичної статистики в даний час побутовий, транспортний і віковий травматизм зріс у нашої країни до такого ступеня, що в скелетно-м'язовій реабілітації тільки нижніх кінцівок мають потребу в буквальному розумінні мільйони (!) жителів України самих різних вікових категорій. На фігурах 7 і 8 представлена конструктивна схема вакуумного фіксатора кінцівки пацієнта згідно патентній заявці США № US 2011032429 від 15.04.2010 г. на "A Universal Robotic Gripping Mechanism Based On Jamming Of Granular Materials". Автори Д. Аменд (J. Amend), Х. Ліпсон (H. Lipson), Г. Джегер (J. Jaeger), Н. Роденберг (N. Roddenberg), Е. Браун (Е. Brown) і ін. Ця конструкція вакуумного "схвату", на наш погляд, найбільшою мірою відповідає технології проведення реабілітаційних процедур на універсальній електромеханічній реабілітаційній установці з модульними приводами, яку запропоновано. Цей фіксатор складається з еластичної ємкості 24, усередині якої знаходиться певна кількість сипкої суміші з твердих дрібних гранул (частинок) 25, що мають, в загальному випадку, самі довільні просторові форми. У нижній частині еластичної ємкості 24 є отвір, закладений під кришку 26 камер 27, забезпеченою газовідвідним штуцером 28. У кришці 26 є система отворів 29, за допомогою яких з внутрішньої порожнини ємкості 24 може бути видалене її газоподібний вміст. Через штуцер 28 і приєднаний до нього гнучкий трубопровід, на фігурах 7 і 8 не показаний, за допомогою вакуумного насоса, який так само не представлений на фігурах 7 і 8, проводиться відведення газоподібного вмісту з внутрішньої порожнини еластичної ємкості 24 під час фіксації об'єкта 30. При цьому на фіг. 7 встановлюваний об'єкт 30 показаний перед його втискуванням у вільний об'єм еластичної ємкості 24, а на фіг. 8 в кінцевій фазі втискування об'єкту 30 зовні в ємність 24 і подальшого видалення газового вмісту з внутрішньої порожнини ємкості 24 через штуцер 28, гнучкий трубопровід і вакуумний насос для остаточної фіксації об'єкту у вакуумному "схвату" перед початком проведення технологічних маніпуляцій. На фігурах 9 і 10 в поперечному розрізі представлено дизайнерське уявлення вакуумного фіксатора стопи 31 пацієнта у вільному стані і з показом механізму її фіксації при викачуванні 4 UA 99583 C2 5 10 15 20 25 30 35 40 45 газу з внутрішньої порожнини еластичної камери 24 фіксатору, відповідно. Позиції окремих елементів фіксатора, показаного на фігурах 9 і 10, повністю відповідають позиціям цих деталей на фігурах 8 і 9. На фігурах 11 і 12 в поперечному розрізі представлена конструкція вакуумних фіксаторів стоп 31 пацієнта, які з метою подальшого розширення функціональних можливостей універсальної електромеханічної реабілітаційної установки з модульними приводами запропоновано встановити на монтажних деталях 23 рухомих елементів приводних лінійних електроприводів за допомогою сферичних шарнірних з'єднань у вигляді основ 32, до яких кріпляться корпуси 27 вакуумних камер, і кульових елементів 33. На фіг. 12 подовжня вісь симетрії фіксатора показана поверненою на кут щодо загальної вертикальної осі установки. На фігурах 13 представлений дизайн загального виду універсальної електромеханічної реабілітаційної установки з модульними приводами, яку запропоновано, в процесі обслуговування пацієнта 34. Показано, що обидві стопи 31 пацієнта під час проведення реабілітаційної процедури закріплено на рухомих елементах лінійних приводів за допомогою еластичних вакуумних камер 24. На фіг. 14 в дизайнерському уявленні показана конструктивна схема фіг. 13 у вигляді зверху. Універсальна електромеханічна реабілітаційна установка з модульними приводами, яку запропоновано, працює таким чином. Пацієнт 34, якому згідно медичному діагнозу призначено проведення лікування скелетно-м'язового апарату нижніх кінцівок у вигляді проведення циклу реабілітаційних процедур, займає місце на кріслі 22 (див. фігури 5 і 13) і розміщує свої стопи 31 на поверхнях пари еластичних камер 24, внутрішні порожнини яких в цей час безпосередньо сполучені з атмосферою. Через останню обставину під впливом маси нижніх кінцівок пацієнта 34 його стопи 31, витісняючи певну частину загального об'єму повітря з внутрішніх порожнин еластичних камер 24, занурюються в них. Очевидно, що при цьому усередині порожнин еластичних камер 24 відбувається такий перерозподіл сипкої маси у вигляді твердих гранул (частинок) 25, яка знаходиться усередині порожнин еластичних камер 24, що певна кількість вказаної сипкої маси виявляється витисненою в ті частини внутрішнього об'єму еластичних камер 24, які починають охоплювати стопи 31 пацієнта 34 збоку і зверху під час їх поглиблення в еластичні камери 24. Потім за допомогою вакуумного устаткування проводиться відсмоктування повітря з внутрішньої порожнини еластичних камер 24, внаслідок чого обидві стопи 31 пацієнта 34 виявляються надійно механічно пов'язаними з рухомими елементами приводних лінійних електричних двигунів, що дозволяє перейти безпосередньо до технологічних операцій реабілітаційного процесу - розробки скелетно-м'язового апарату пацієнта 34 із зусиллями і швидкостями, певними і заданими фахівцями-травматологами. Завдяки наявності пари електричних обертальних двигунів 17 (див. фігури 5 і 6), що приводять в рух гвинти 19 прецизійних шарико- або роликогвинтових пар типу "гвинт - гайка кочення", що самостійно гальмуються, в ході реабілітаційного процесу може бути застосоване поєднання прямолінійного переміщення кінцівки пацієнта з її поворотом основ 11 в горизонтальній площині. Як вже було показано вище, універсальна електромеханічна реабілітаційна установка з модульними приводами, яку запропоновано, легко перетвориться в прецизійний тренажерний апарат широкого профілю, який може бути рекомендований для оснащення сучасних тренажерних комплексів і фітнес-центрів. Для цього необхідно провести всього лише тільки зміну напряму струму якірної обмотки лінійного приводу на протилежне тому, яке використане в установці реабілітаційного профілю. ФОРМУЛА ВИНАХОДУ 50 55 60 1. Універсальна електромеханічна реабілітаційна установка з модульними приводами, що складається з одного або декількох основних функціональних блоків-модулів у вигляді лінійних електричних приводів, у яких виконавчі рухомі силові органи, що несуть фіксатори кінцівок пацієнта, що розроблюються, можуть бути виконані у вигляді укорочених активних конструктивних елементів лінійних електродвигунів, що несуть якірні обмотки управління, підключені до зовнішнього джерела електричної енергії, або як активні або пасивні подовжені шляхові структури, і допоміжних функціональних електромеханічних блоків-модулів з серводвигунами, яка відрізняється тим, що основу кожного з пари приводних лінійних електричних двигунів, що входять до складу реабілітаційної установки, встановлено з можливістю повороту в горизонтальній площині на опорах кочення, що самовстановлюються, забезпечено гайкою кочення прецизійної механічної пари "гвинт - гайка кочення", обертальний гвинт кожної з яких закріплений на роторі серводвигуна обертального типу, причому корпус 5 UA 99583 C2 5 10 гайки кочення закріплений з можливістю повороту на вертикальній осі, встановленій на основі приводного лінійного двигуна, а корпус серводвигуна, відповідно, закріплений з можливістю повороту на вертикальній осі, встановленій на загальній нерухомій основі реабілітаційної установки. 2. Універсальна електромеханічна реабілітаційна установка з модульними приводами за п. 1, яка відрізняється тим, що на виконавчих рухомих силових органах приводних лінійних електродвигунів встановлені вакуумні фіксатори кінцівок пацієнта, що розроблюються, які виконані у вигляді еластичних ємкостей, заповнених сипкою масою з дрібних твердих гранульованих частинок довільної форми і забезпечених гнучкими трубопроводами для з'єднання з вакуум-насосами і зовнішнім середовищем. 3. Універсальна електромеханічна реабілітаційна установка з модульними приводами за пп. 1 і 2, яка відрізняється тим, що еластичні ємкості вакуумних фіксаторівкінцівок пацієнта, що розроблюються, закріплені на рухомих елементах лінійних двигунів за допомогою сферичного шарнірного з'єднання. 6 UA 99583 C2 7 UA 99583 C2 8 UA 99583 C2 9 UA 99583 C2 10 UA 99583 C2 11 UA 99583 C2 Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Назва патенту англійськоюVersatile electromechanical rehabilitation device with modular drives
Автори англійськоюPetoian Karen Volodymyrovych, Petoian Volodymyr Karenovych, Honcharuk Anton Antonovych, Belikov Viktor Tryfonovych, Vasyliev Valerii Valentynovych
Назва патенту російськоюУниверсальная электромеханическая реабилитационная установка с модульными приводами
Автори російськоюПетоян Карен Владимирович, Петоян Владимир Каренович, Гончарук Антон Антонович, Беликов Виктор Трифонович, Васильев Валерий Валентинович
МПК / Мітки
МПК: A63B 22/00, A63B 24/00, A63B 23/04, A63B 69/06
Мітки: установка, реабілітаційна, універсальна, електромеханічна, модульними, приводами
Код посилання
<a href="https://ua.patents.su/14-99583-universalna-elektromekhanichna-reabilitacijjna-ustanovka-z-modulnimi-privodami.html" target="_blank" rel="follow" title="База патентів України">Універсальна електромеханічна реабілітаційна установка з модульними приводами</a>
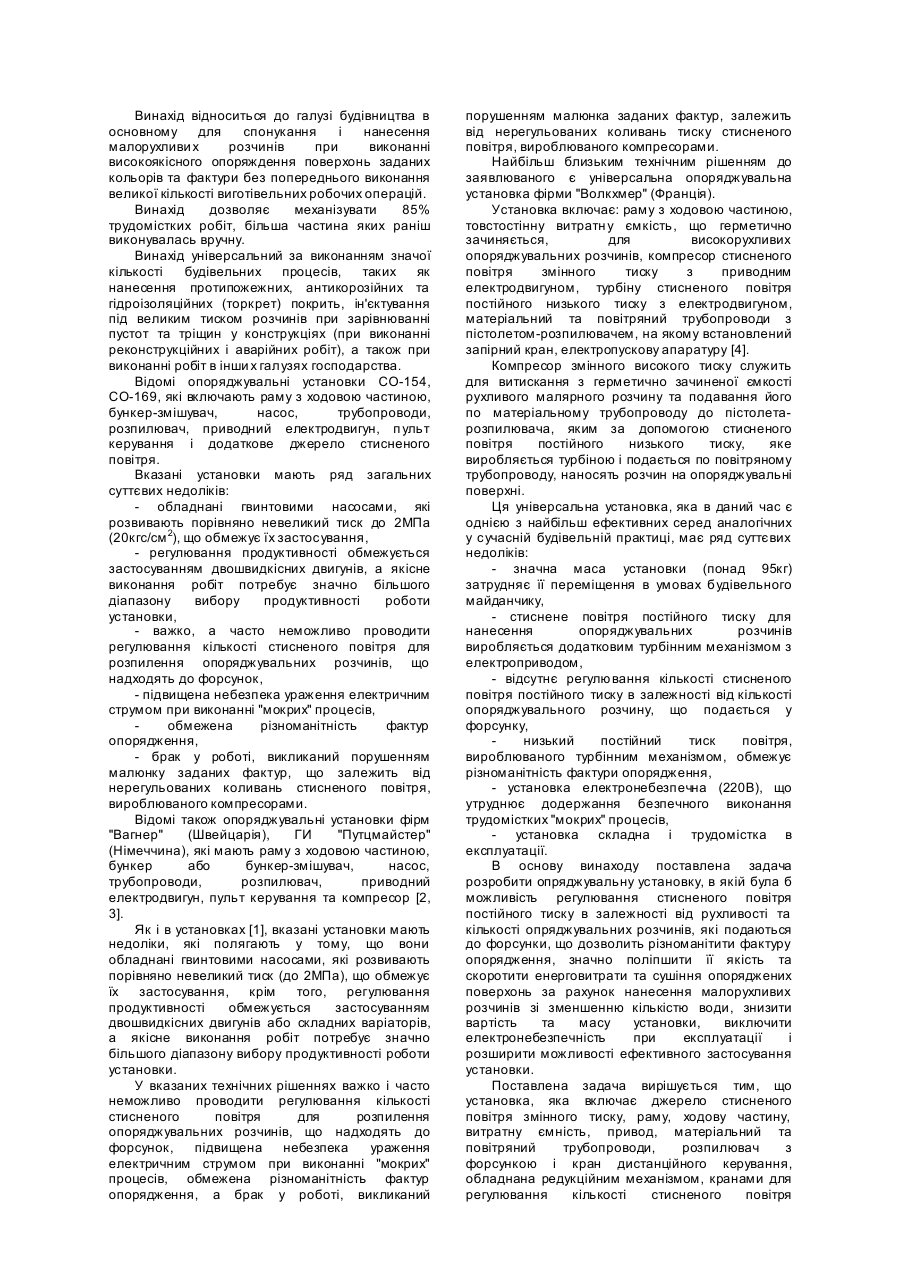
Універсальна опоряджувальна установка
Номер патенту: 17261
Опубліковано: 01.04.1997
Автор: Петрунькін Григорій Валер'янович
МПК: E04F 21/02
Мітки: установка, універсальна, опоряджувальна
Формула / Реферат:
Універсальна опоряджувальна установка, яка включає джерело стисненого повітря змінного тиску, раму, ходову частину, витратну ємність, привод, матеріальний та повітряний трубопроводи, розпилювач з форсункою і кран дистанційного керування, яка відрізняється тим, що вона обладнана редукційним механізмом, кранами для регулювання кількості стисненого повітря постійного тиску та для регулювання продуктивності установки, причому джерело стисненого...
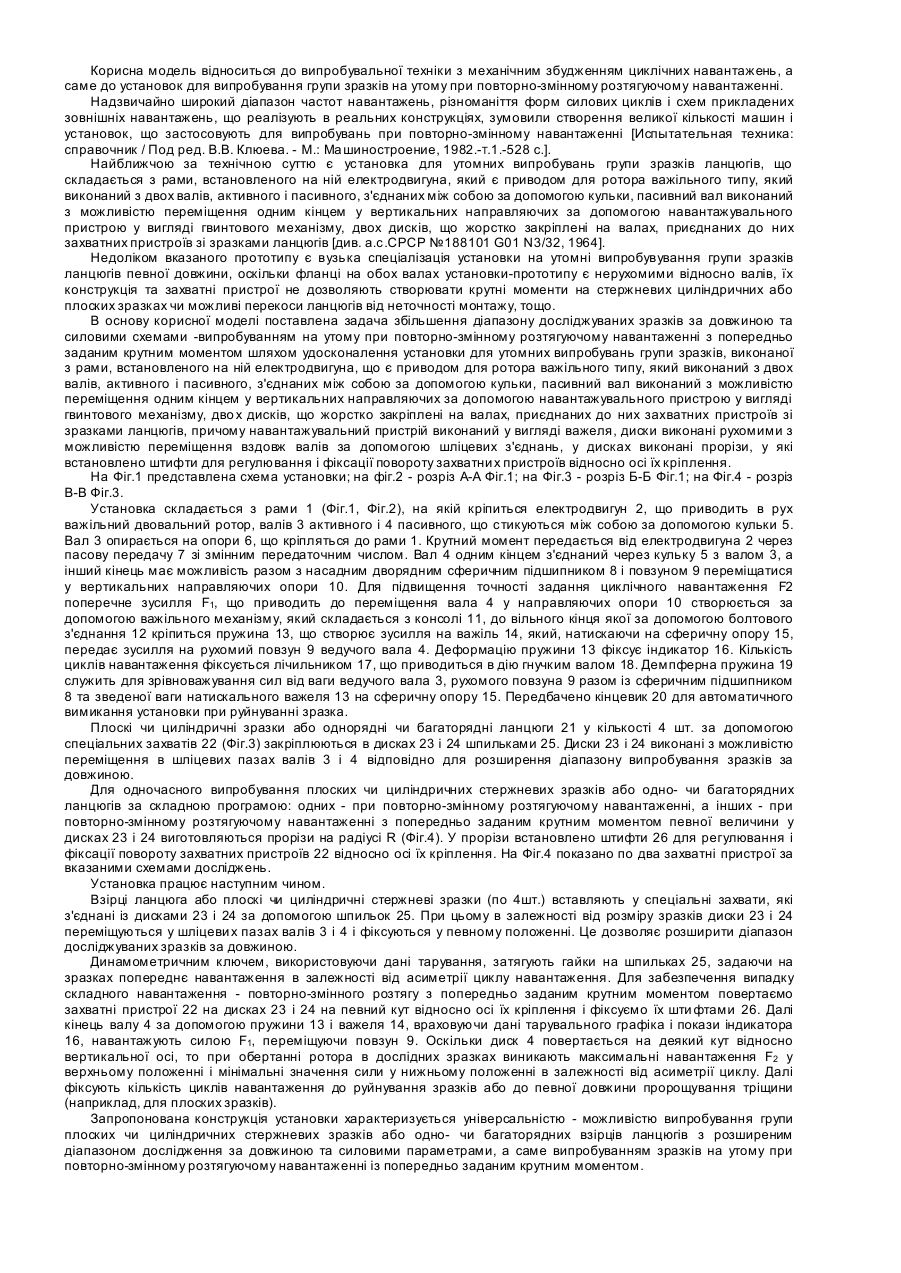
Універсальна установка для утомних випробувань групи зразків
Номер патенту: 8125
Опубліковано: 15.07.2005
Автори: Зубченко Олександр Іванович, Підгурський Микола Іванович
МПК: G01N 3/32
Мітки: утомних, випробувань, установка, універсальна, групи, зразків
Формула / Реферат:
Універсальна установка для утомних випробувань групи зразків, що складається з рами, встановленого на ній електродвигуна, що є приводом для ротора важільного типу, який виконаний з двох валів, активного і пасивного, з'єднаних між собою за допомогою кульки, пасивний вал виконаний з можливістю переміщення одним кінцем у вертикальних направляючих за допомогою навантажувального пристрою у вигляді гвинтового механізму, двох дисків, що жорстко...
Універсальна кліматична установка
Номер патенту: 57252
Опубліковано: 10.02.2011
Автор: Бабелюк Валерій Євзебійович
МПК: A61G 10/02
Мітки: універсальна, установка, кліматична
Формула / Реферат:
Універсальна кліматична установка, що містить основний блок та блок керування, основний блок складається з двох частин: верхньої, на якій встановлено лампи підсвічування, та нижньої з принаймні однією пасивною секцією, виконаною у вигляді порожнини, що містить матрицю з наповнювачем і нагрівальні елементи, розташовані під матрицею, та датчик температури, яка відрізняється тим, що нижня частина додатково має щонайменше одну активну секцію,...
Універсальна установка для виробництва біодизельного палива
Номер патенту: 37619
Опубліковано: 10.12.2008
Автори: Умінський Сергій Михайлович, Топілін Геннадій Євгенович
МПК: C10L 5/40
Мітки: установка, виробництва, біодизельного, палива, універсальна
Формула / Реферат:
Універсальна установка для виробництва біодизельного палива, що містить гідростанцію, яка складається з електродвигуна, муфти та гідронасоса, технологічні ємкості для сировини та готової продукції, сепаратор, фільтр-вологоочисник, трисекційний бак, з'єднувальну апаратуру, контрольно-вимірювальну апаратуру та витратомір, яка відрізняється тим, що в нагнітальну магістраль на шляху руху рапсового масла вмонтовані одне за одним дозатор-змішувач...
Універсальна побутова водогрійна установка
Номер патенту: 55068
Опубліковано: 17.03.2003
Автори: Комаров Володимир Борисович, Рейсіг Володимир Анатолійович
МПК: F24H 1/00
Мітки: побутова, водогрійна, установка, універсальна
Формула / Реферат:
Універсальна побутова водогрійна установка, що споряджена газоходом з осьовим вентилятором і розташованим над джерелом тепла теплообмінником, який виконано у вигляді набору однакових пластинчастих теплообмінників, кожний з яких розміщено над джерелом тепла з регульованою витратою палива і має вхід і вихід, який відрізняється тим, що вхід кожного пластинчастого теплообмінника сполучено з підвідним, вихід - з відвідним трубопроводом, а газохід...
Попередній патент: Ветеринарна фармацевтична композиція й спосіб (варіанти) профілактики й лікування захворювань шкт і інтоксикацій різної етіології у тварин
Наступний патент: Спосіб одержання (s)-2,6-діаміногексанової кислоти 3-метил-1,2,4-триазоліл-5-тіоацетату
Випадковий патент: Пристрій для вимірювання кров'яного тиску та спосіб експлуатації пристрою для вимірювання кров'яного тиску