Керований електричний реактор



Формула / Реферат
1. Керований електричний реактор, який містить електронну систему управління і електромагнітну частину, що містить в кожній з фаз реактора мережеву і керуючу обмотки, які складаються з намотаних проводами секцій, а також стрижневий магнітопровід, стрижні якого виконані з елементів, розташованих послідовно по висоті і розділених на дві паралельні частини - внутрішню і зовнішню, причому в зовнішній частині кожного елемента стрижня виконаний немагнітний зазор, витки проводів секцій мережевої обмотки охоплюють переріз стрижня цілком, а витки проводів секцій керуючої обмотки охоплюють переріз стрижня частково, який відрізняється тим, що число секцій керуючої обмотки на стрижні парне, кінці розташованих рядом секцій в керуючій обмотці з'єднані паралельно, а напрям намотування в них - зустрічний, паралельні частини принаймні одного елемента стрижня реактора виконані у вигляді дисків з радіально шихтованих по периметру пластин електротехнічної сталі, відокремлених від інших елементів стрижня немагнітними зазорами як в зовнішній, так і у внутрішній частинах, причому секції керуючої обмотки розташовані усередині зовнішнього диска, а секції мережевої обмотки розташовані зовні зовнішнього диска, електронна система управління виконана у вигляді принаймні одного керованого джерела постійної напруги, вихідні клеми якого з'єднані з кінцями принаймні однієї пари секцій керуючої обмотки.
2. Реактор за п. 1, який відрізняється тим, що кінці керуючих обмоток різних фаз з'єднані по схемі "розімкнений трикутник", причому розімкнені кінці з'єднані з керованим джерелом постійної напруги.
3. Реактор за п. 1, який відрізняється тим, що на стрижнях магнітопроводу встановлені додаткові компенсаційні обмотки, кінці різних фаз яких з'єднані по схемі "трикутник".
4. Реактор за п. 1, який відрізняється тим, що кероване джерело постійної напруги містить послідовно з'єднані трансформатор живлення напівпровідникового перетворювача, напівпровідниковий перетворювач з блоком захисту від перенапружень на вході і автономну систему автоматичного управління.
5. Реактор за п. 4, який відрізняється тим, що компенсаційні або мережеві обмотки кожної фази містять додаткові відведення, з'єднані з трансформатором живлення керованого джерела постійної напруги.
Текст
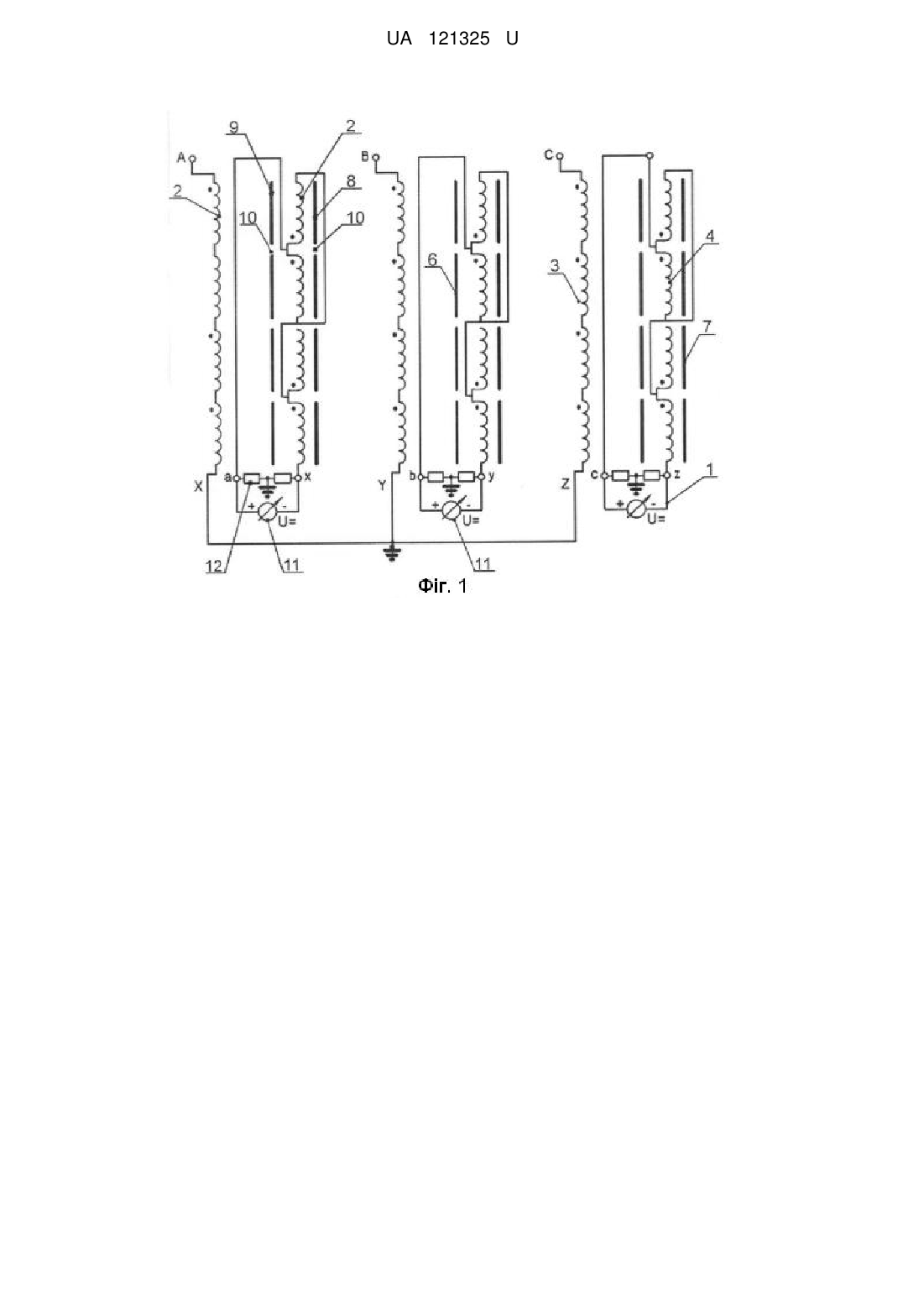
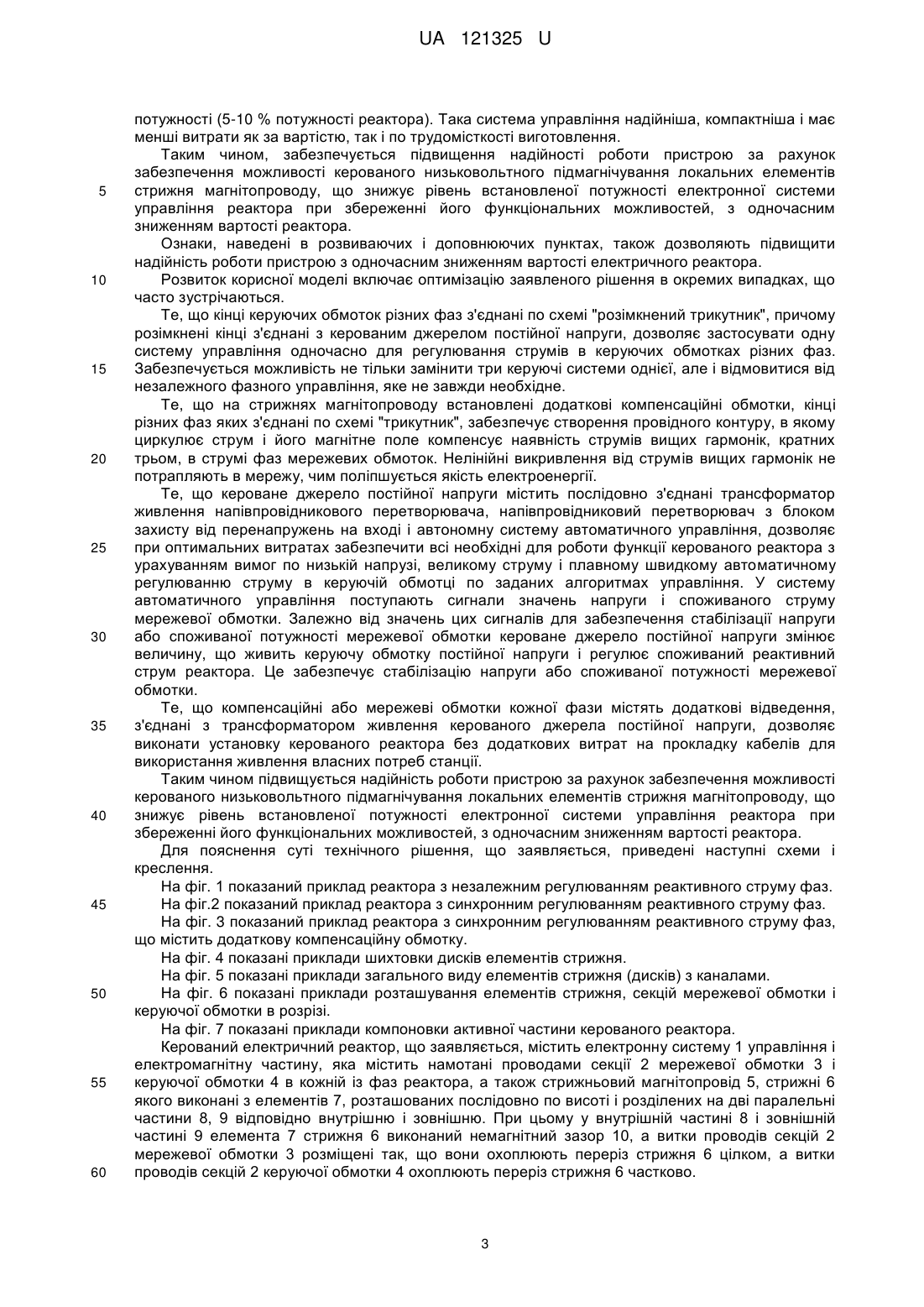
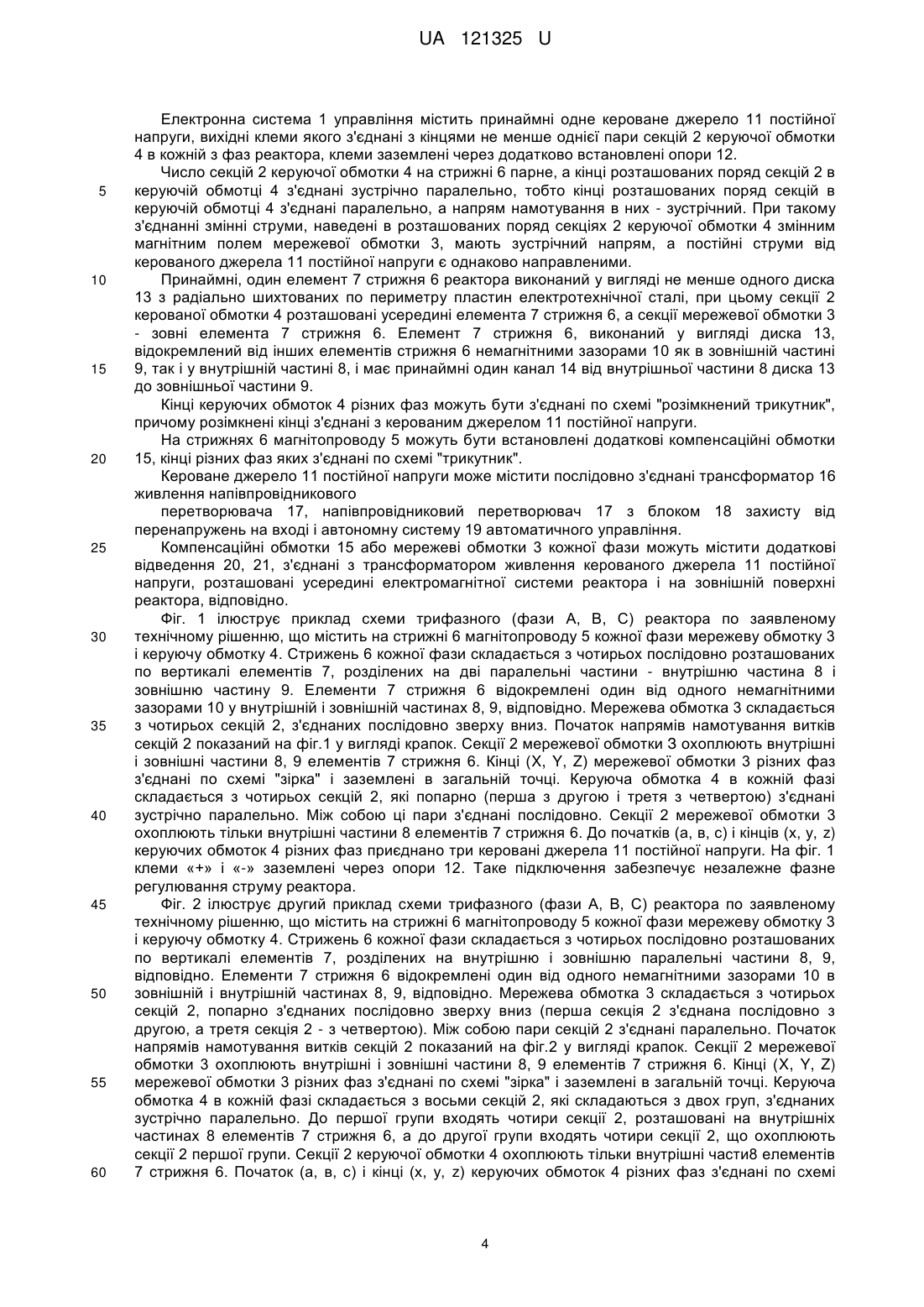
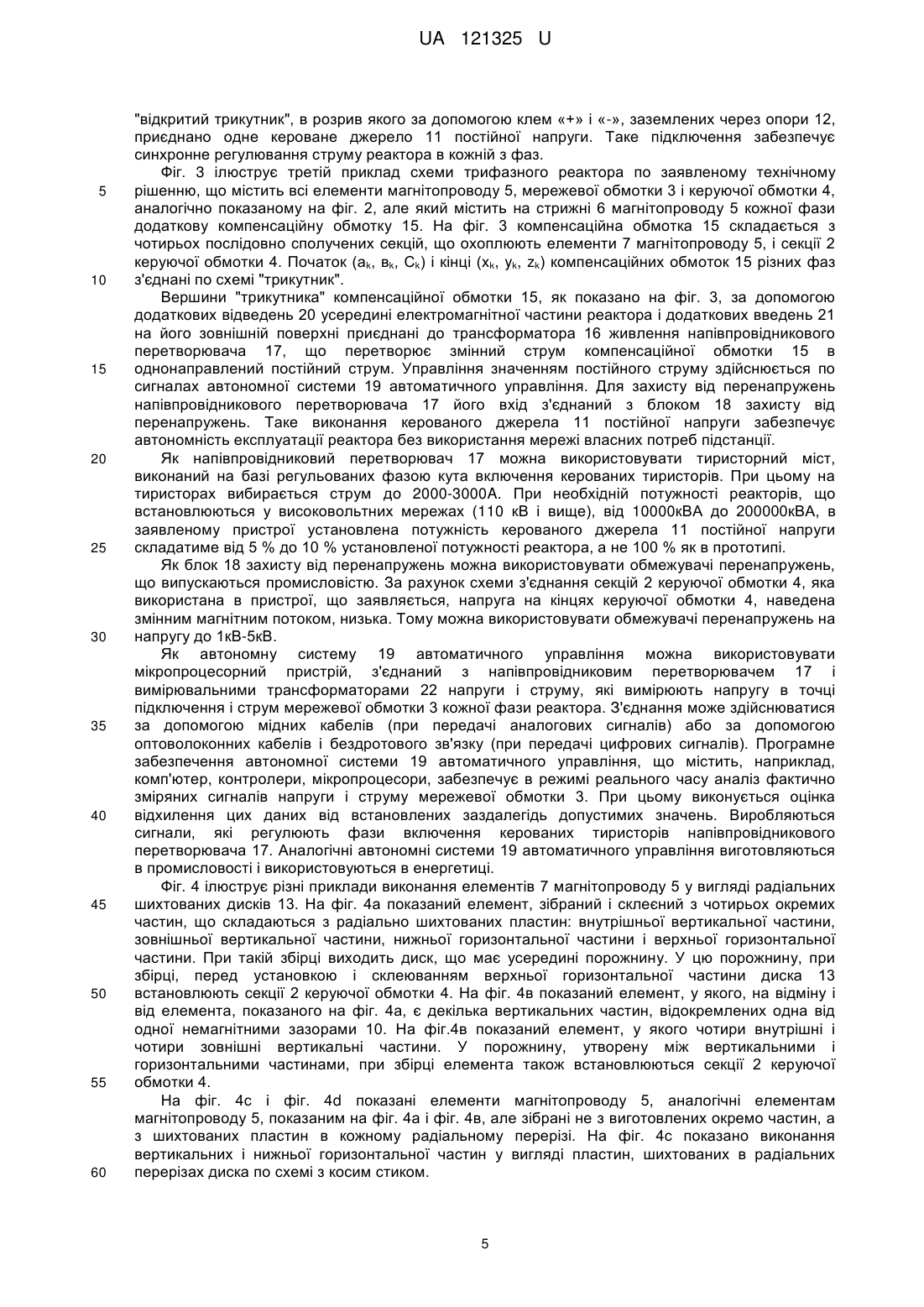
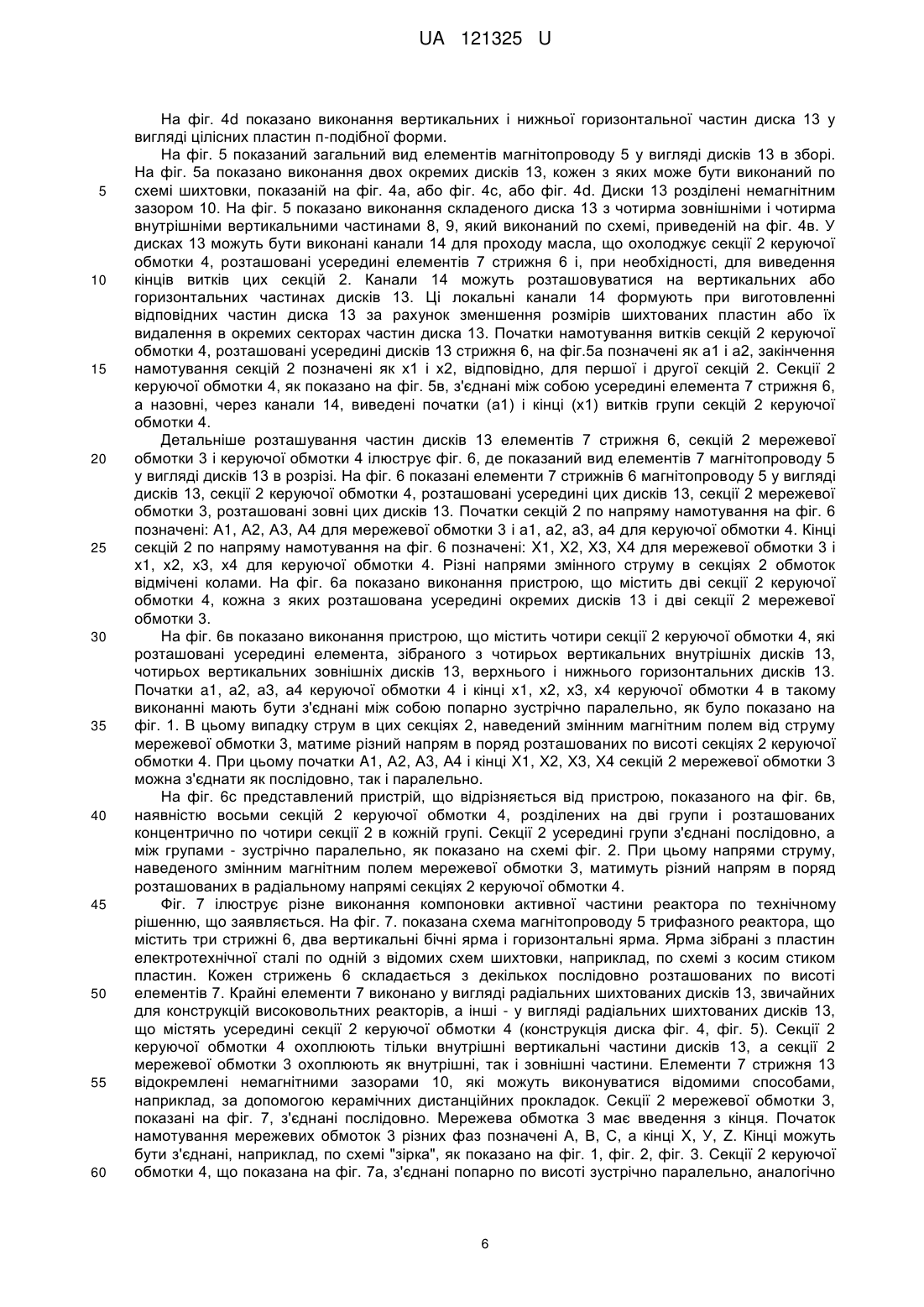
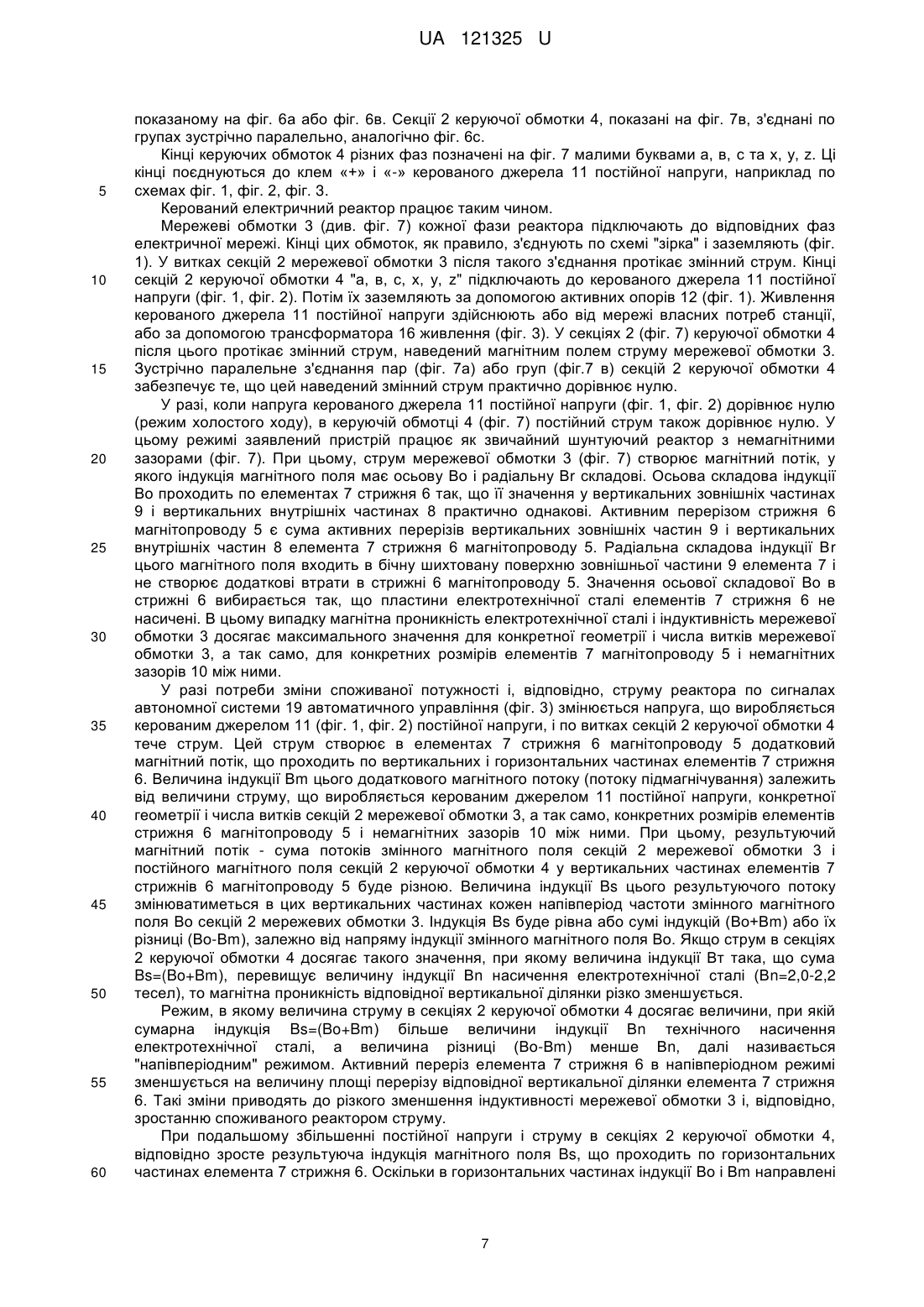
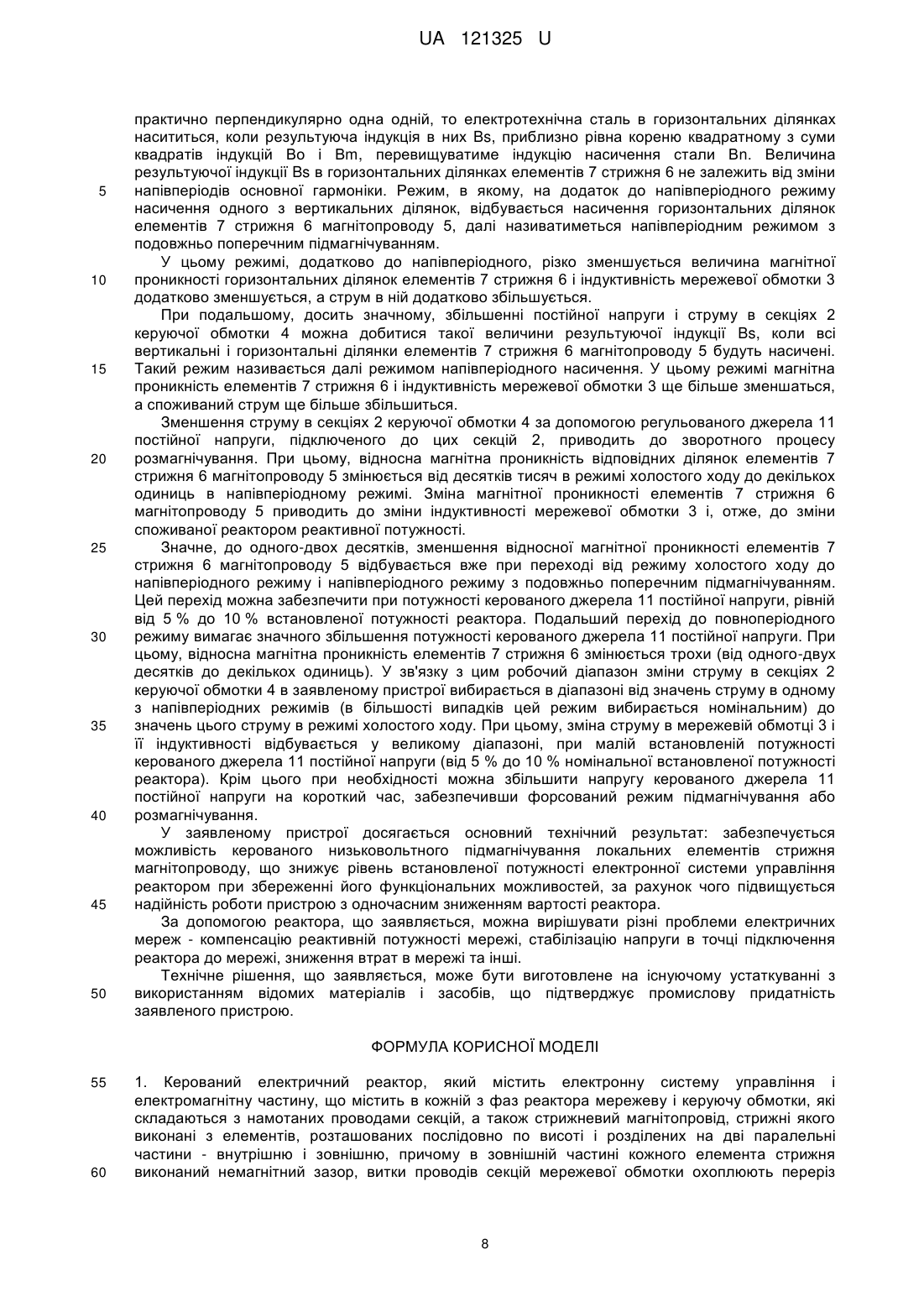
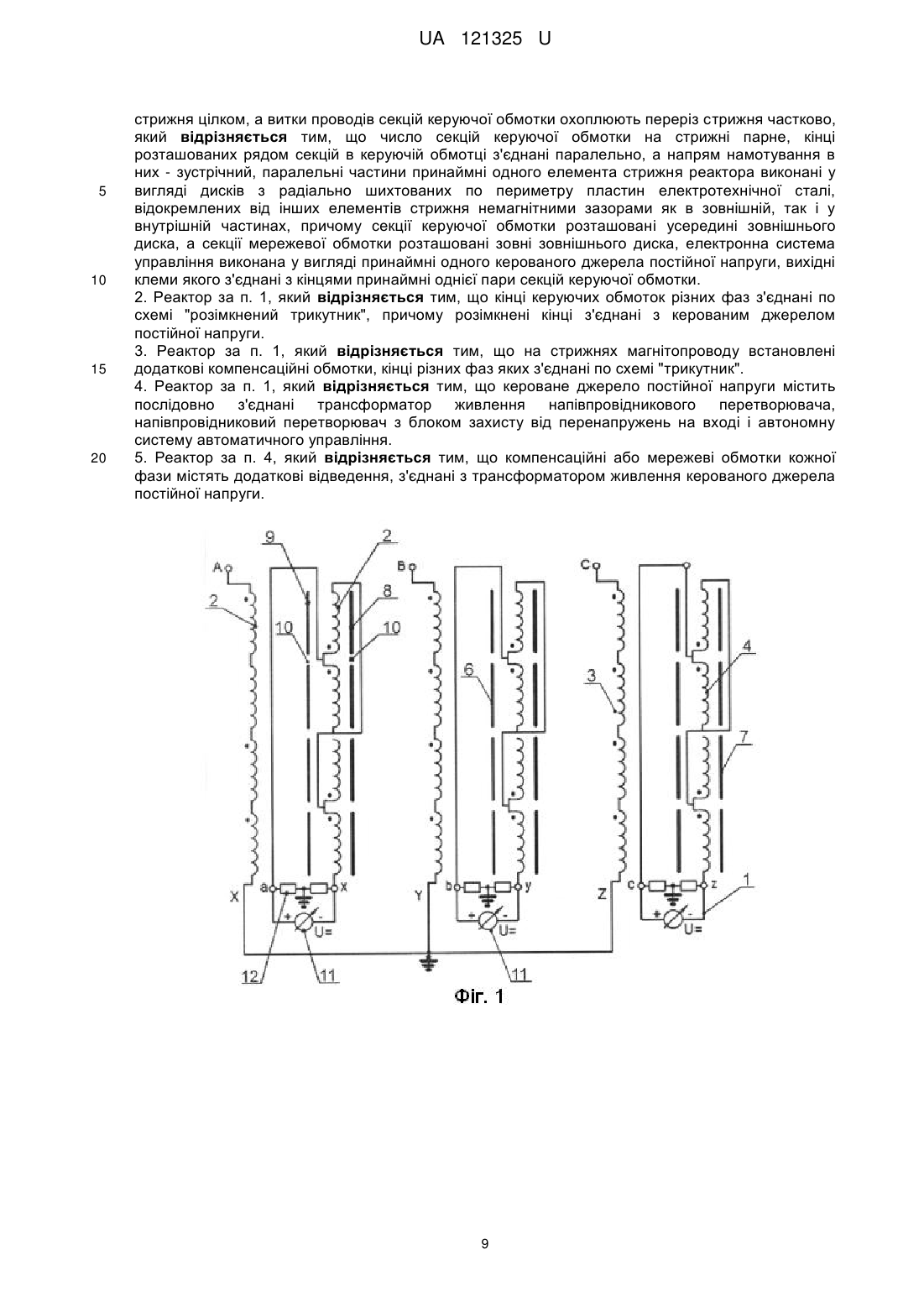
Реферат: UA 121325 U UA 121325 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до електротехніки і може бути використана наприклад як шунтуючий реактор для регулювання напруги і реактивної потужності у високовольтних лініях електропередач. Регулювання напруги на лінії електропередачі здійснюють шляхом компенсації її реактивної потужності, для чого шунтують лінію керованими реакторами, використовуваними як регулятори реактивного струму. Відомий керований електричний реактор (див. п. США № 4837497, від 29.12 1987 р., опубл. 06.06.1989р. МПК H01F 29/02, 30/10, 30/12, G05F 3/04), який містить електронну систему управління і електромагнітну частину, що містить мережеву обмотку і керуючу обмотку, які складаються з намотаних проводами секцій в кожній з фаз реактора, а також магнітопровід, виконаний у вигляді двох стрижнів, на кожному з яких розміщені первинні і вторинні обмотки, причому первинні обмотки з'єднані паралельно, а вторинні послідовно. Електронна система управління для регулювання індуктивного опору на стороні первинної обмотки містить двонаправлений електронний ключ на тиристорах з фазовим управлінням. Відомий керований електричний реактор забезпечує регулювання струму тільки через первинну обмотку при низькому рівні гармонік з порядковими номерами 5, 7, 11, 13. При цьому параметри електронного ключа повинні відповідати напрузі первинної обмотки, що при напрузі більше 100 кВ приводить до необхідності використовувати велике число послідовно з'єднаних потужних тиристорів, суттєво недовантажених по струму. Тому недоліками відомого пристрою є низька надійність його роботи і висока вартість реактора. Найбільш близьким за технічною суттю і результатом, що досягається, до технічного рішення, що заявляється, є керований електричний реактор (див. патент РФ № 2518149, з.№ 2012139807 від 18.09.2012 р., опубл. 10.06.2014 p., МПК H02J 3/00), який містить електронну систему управління і електромагнітну частину, що містить в кожній з фаз реактора мережеву і керуючу обмотки, які складаються з намотаних проводами секцій, а також стрижневий магнітопровід, стрижні якого виконані з елементів, розташованих послідовно по висоті і розділених на дві паралельні частини - внутрішню і зовнішню, при цьому в зовнішній частині кожного елемента стрижня виконаний немагнітний зазор, витки проводів секцій мережевої обмотки охоплюють переріз стрижня цілком, а витки проводів секцій керуючої обмотки охоплюють переріз стрижня частково. У відомому керованому реакторі необхідно, щоб сумарна встановлена потужність електронних ключів управління дорівнювала номінальній потужності трифазного реактора. Для високовольтних ліній електропередач (110 кВ і вище) на практиці потужність встановлюваних реакторів змінюється зазвичай від 10000 кВА до 200000 кВА. Це приводить до необхідності використання великої кількості потужних високовольтних електронних ключів управління і створення спеціальних дорогих конструкцій для їх охолоджування і ізоляції. Таким чином, недоліками відомого пристрою є низька надійність його роботи і висока вартість керованого електричного реактора. В основу корисної моделі поставлена задача удосконалення керованого електричного реактора, в якому шляхом введення нових елементів, зв'язків між ними і нового виконання елементів забезпечується можливість керованого низьковольтного підмагнічування локальних елементів стрижня магнітопроводу, що знижує рівень встановленої потужності електронної системи управління реактором при збереженні його функціональних можливостей, за рахунок чого підвищується надійність роботи пристрою з одночасним зниженням вартості реактора. Поставлена задача вирішується тим, що у відомому керованому електричному реакторі, який містить електронну систему управління і електромагнітну частину, що містить в кожній з фаз реактора мережеву і керуючу обмотки, які складаються з намотаних проводами секцій, а також стрижневий магнітопровід, стрижні якого виконані з елементів, розташованих послідовно по висоті і розділених на дві паралельні частини - внутрішню і зовнішню, при цьому в зовнішній частині кожного елемента стрижня виконаний немагнітний зазор, витки проводів секцій мережевої обмотки охоплюють переріз стрижня цілком, а витки проводів секцій керуючої обмотки охоплюють переріз стрижня частково, новим є те, що число секцій керуючої обмотки на стрижні парне, кінці розташованих поряд секцій в керуючій обмотці з'єднані паралельно, а напрям намотування в них - зустрічний, паралельні частини принаймні одного елемента стрижня реактора виконані у вигляді дисків з радіально шихтованих по периметру пластин електротехнічної сталі, відокремлених від інших елементів стрижня немагнітними зазорами як в зовнішній, так і у внутрішній частинах, при цьому секції керуючої обмотки розташовані усередині зовнішнього диска, а секції мережевої обмотки розташовані зовні зовнішнього диска, електронна система управління виконана у вигляді принаймні одного керованого джерела 1 UA 121325 U 5 10 15 20 25 30 35 40 45 50 55 постійної напруги, вихідні клеми якого з'єднані з кінцями принаймні однієї пари секцій керуючої обмотки. Новим є також те, що кінці керуючих обмоток різних фаз з'єднані по схемі "розімкнений трикутник", причому розімкнені кінці з'єднані з керованим джерелом постійної напруги. Новим є також те, що на стрижнях магнітопроводу встановлені додаткові компенсаційні обмотки, кінці різних фаз яких з'єднані по схемі "трикутник". Новим є також те, що кероване джерело постійної напруги містить послідовно з'єднані трансформатор живлення напівпровідникового перетворювача, напівпровідниковий перетворювач з блоком захисту від перенапружень на вході і автономну систему автоматичного управління. Новим є також те, що компенсаційні або мережеві обмотки кожної фази містять додаткові відведення, з'єднані з трансформатором живлення керованого джерела постійної напруги. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом, що досягається, полягає в тому, що в керованому електричному реакторі, що заявляється, число секцій керуючої обмотки на стрижні парне, кінці розташованих поряд секцій в керованій обмотці з'єднані паралельно, а напрям намотування в них - зустрічний, паралельні частини принаймні одного елемента стрижня реактора виконані у вигляді дисків з радіально шихтованих по периметру пластин електротехнічної сталі, відокремлених від інших елементів стрижня немагнітними зазорами як в зовнішній, так і у внутрішній частинах, при цьому секції керуючої обмотки розташовані усередині зовнішнього диска, а секції мережевої обмотки розташовані зовні зовнішнього диска, електронна система управління виконана у вигляді принаймні одного керованого джерела постійної напруги, вихідні клеми якого з'єднані з кінцями принаймні однієї пари секцій керуючої обмотки, що в сукупності з відомими ознаками забезпечує можливість керованого низьковольтного підмагнічування локальних елементів стрижня магнітопроводу, що знижує рівень встановленої потужності електронної системи управління реактора при збереженні його функціональних можливостей, за рахунок чого досягається підвищення надійності роботи пристрою з одночасним зниженням вартості реактора. Пояснюється це таким. Виконання керуючої обмотки з парним числом секцій на стрижні, де кінці розташованих поряд секцій в керуючій обмотці з'єднані паралельно, а напрям намотування в них - зустрічний, забезпечує компенсацію наведеної напруги від магнітного поля мережевої обмотки і, отже, відсутність в секціях керуючої обмотки змінного струму, наведеного мережевою обмоткою. Це приводить до зменшення втрат в керуючій обмотці і зменшення викривлень магнітного поля, що створюється цією обмоткою в елементах стрижня магнітної системи. Те, що паралельні частини принаймні одного елемента стрижня реактора виконані у вигляді дисків з радіально шихтованих по периметру пластин електротехнічної сталі, відокремлених від інших елементів стрижня немагнітними зазорами як в зовнішній, так і у внутрішній частинах, при цьому секції керуючої обмотки розташовані усередині зовнішнього диска, а секції мережевої обмотки розташовані зовні зовнішнього диска, забезпечує технологічність виготовлення. Диски можуть бути виготовлені окремо, наприклад як в звичайних шунтуючих реакторах з використанням автоматичного технологічного устаткування. Такі локальні елементи стрижня із зосередженими в них секціями керуючої обмотки дозволяють проводити підмагнічування цих елементів окремо, незалежно від інших елементів стрижня. Локальне підмагнічування вимагає менших витрат енергії і дозволяє виконати керуючу обмотку на великі струми (до 2000 А), але низьку напругу (до 500 В). Низьковольтна керуюча обмотка, розміщена між двома паралельними вертикальними частинами стрижня, не вимагає складної ізоляції і великих ізоляційних відстаней, причому мережева обмотка залишається високовольтною (від 10 кВ до 1200 кВ). Конструкція керованого реактора виходить компактною, знижується витрата матеріалів, а також знижуються втрати. Те, що кінці розташованих поряд секцій в керованій обмотці з'єднані паралельно, а напрям намотування в них - зустрічний, забезпечує те, що змінні струми, наведені в них змінним магнітним полем мережевої обмотки, мають зустрічний напрям, а постійні струми від керованого джерела постійної напруги є однонаправленими. Те, що електронна система управління виконана у вигляді принаймні одного керованого джерела постійної напруги, вихідні клеми якого з'єднані з кінцями принаймні однієї пари секцій керуючої обмотки дозволяє відмовитися від використання ненадійних електронних компонентів, розрахованих на високу напругу і велику потужність (до 100 % потужності реактора). При цьому забезпечується управління струмом в секціях керуючої обмотки при низькій напрузі (до 500 В) і 2 UA 121325 U 5 10 15 20 25 30 35 40 45 50 55 60 потужності (5-10 % потужності реактора). Така система управління надійніша, компактніша і має менші витрати як за вартістю, так і по трудомісткості виготовлення. Таким чином, забезпечується підвищення надійності роботи пристрою за рахунок забезпечення можливості керованого низьковольтного підмагнічування локальних елементів стрижня магнітопроводу, що знижує рівень встановленої потужності електронної системи управління реактора при збереженні його функціональних можливостей, з одночасним зниженням вартості реактора. Ознаки, наведені в розвиваючих і доповнюючих пунктах, також дозволяють підвищити надійність роботи пристрою з одночасним зниженням вартості електричного реактора. Розвиток корисної моделі включає оптимізацію заявленого рішення в окремих випадках, що часто зустрічаються. Те, що кінці керуючих обмоток різних фаз з'єднані по схемі "розімкнений трикутник", причому розімкнені кінці з'єднані з керованим джерелом постійної напруги, дозволяє застосувати одну систему управління одночасно для регулювання струмів в керуючих обмотках різних фаз. Забезпечується можливість не тільки замінити три керуючі системи однієї, але і відмовитися від незалежного фазного управління, яке не завжди необхідне. Те, що на стрижнях магнітопроводу встановлені додаткові компенсаційні обмотки, кінці різних фаз яких з'єднані по схемі "трикутник", забезпечує створення провідного контуру, в якому циркулює струм і його магнітне поле компенсує наявність струмів вищих гармонік, кратних трьом, в струмі фаз мережевих обмоток. Нелінійні викривлення від струмів вищих гармонік не потрапляють в мережу, чим поліпшується якість електроенергії. Те, що кероване джерело постійної напруги містить послідовно з'єднані трансформатор живлення напівпровідникового перетворювача, напівпровідниковий перетворювач з блоком захисту від перенапружень на вході і автономну систему автоматичного управління, дозволяє при оптимальних витратах забезпечити всі необхідні для роботи функції керованого реактора з урахуванням вимог по низькій напрузі, великому струму і плавному швидкому автоматичному регулюванню струму в керуючій обмотці по заданих алгоритмах управління. У систему автоматичного управління поступають сигнали значень напруги і споживаного струму мережевої обмотки. Залежно від значень цих сигналів для забезпечення стабілізації напруги або споживаної потужності мережевої обмотки кероване джерело постійної напруги змінює величину, що живить керуючу обмотку постійної напруги і регулює споживаний реактивний струм реактора. Це забезпечує стабілізацію напруги або споживаної потужності мережевої обмотки. Те, що компенсаційні або мережеві обмотки кожної фази містять додаткові відведення, з'єднані з трансформатором живлення керованого джерела постійної напруги, дозволяє виконати установку керованого реактора без додаткових витрат на прокладку кабелів для використання живлення власних потреб станції. Таким чином підвищується надійність роботи пристрою за рахунок забезпечення можливості керованого низьковольтного підмагнічування локальних елементів стрижня магнітопроводу, що знижує рівень встановленої потужності електронної системи управління реактора при збереженні його функціональних можливостей, з одночасним зниженням вартості реактора. Для пояснення суті технічного рішення, що заявляється, приведені наступні схеми і креслення. На фіг. 1 показаний приклад реактора з незалежним регулюванням реактивного струму фаз. На фіг.2 показаний приклад реактора з синхронним регулюванням реактивного струму фаз. На фіг. 3 показаний приклад реактора з синхронним регулюванням реактивного струму фаз, що містить додаткову компенсаційну обмотку. На фіг. 4 показані приклади шихтовки дисків елементів стрижня. На фіг. 5 показані приклади загального виду елементів стрижня (дисків) з каналами. На фіг. 6 показані приклади розташування елементів стрижня, секцій мережевої обмотки і керуючої обмотки в розрізі. На фіг. 7 показані приклади компоновки активної частини керованого реактора. Керований електричний реактор, що заявляється, містить електронну систему 1 управління і електромагнітну частину, яка містить намотані проводами секції 2 мережевої обмотки 3 і керуючої обмотки 4 в кожній із фаз реактора, а також стрижньовий магнітопровід 5, стрижні 6 якого виконані з елементів 7, розташованих послідовно по висоті і розділених на дві паралельні частини 8, 9 відповідно внутрішню і зовнішню. При цьому у внутрішній частині 8 і зовнішній частині 9 елемента 7 стрижня 6 виконаний немагнітний зазор 10, а витки проводів секцій 2 мережевої обмотки 3 розміщені так, що вони охоплюють переріз стрижня 6 цілком, а витки проводів секцій 2 керуючої обмотки 4 охоплюють переріз стрижня 6 частково. 3 UA 121325 U 5 10 15 20 25 30 35 40 45 50 55 60 Електронна система 1 управління містить принаймні одне кероване джерело 11 постійної напруги, вихідні клеми якого з'єднані з кінцями не менше однієї пари секцій 2 керуючої обмотки 4 в кожній з фаз реактора, клеми заземлені через додатково встановлені опори 12. Число секцій 2 керуючої обмотки 4 на стрижні 6 парне, а кінці розташованих поряд секцій 2 в керуючій обмотці 4 з'єднані зустрічно паралельно, тобто кінці розташованих поряд секцій в керуючій обмотці 4 з'єднані паралельно, а напрям намотування в них - зустрічний. При такому з'єднанні змінні струми, наведені в розташованих поряд секціях 2 керуючої обмотки 4 змінним магнітним полем мережевої обмотки 3, мають зустрічний напрям, а постійні струми від керованого джерела 11 постійної напруги є однаково направленими. Принаймні, один елемент 7 стрижня 6 реактора виконаний у вигляді не менше одного диска 13 з радіально шихтованих по периметру пластин електротехнічної сталі, при цьому секції 2 керованої обмотки 4 розташовані усередині елемента 7 стрижня 6, а секції мережевої обмотки 3 - зовні елемента 7 стрижня 6. Елемент 7 стрижня 6, виконаний у вигляді диска 13, відокремлений від інших елементів стрижня 6 немагнітними зазорами 10 як в зовнішній частині 9, так і у внутрішній частині 8, і має принаймні один канал 14 від внутрішньої частини 8 диска 13 до зовнішньої частини 9. Кінці керуючих обмоток 4 різних фаз можуть бути з'єднані по схемі "розімкнений трикутник", причому розімкнені кінці з'єднані з керованим джерелом 11 постійної напруги. На стрижнях 6 магнітопроводу 5 можуть бути встановлені додаткові компенсаційні обмотки 15, кінці різних фаз яких з'єднані по схемі "трикутник". Кероване джерело 11 постійної напруги може містити послідовно з'єднані трансформатор 16 живлення напівпровідникового перетворювача 17, напівпровідниковий перетворювач 17 з блоком 18 захисту від перенапружень на вході і автономну систему 19 автоматичного управління. Компенсаційні обмотки 15 або мережеві обмотки 3 кожної фази можуть містити додаткові відведення 20, 21, з'єднані з трансформатором живлення керованого джерела 11 постійної напруги, розташовані усередині електромагнітної системи реактора і на зовнішній поверхні реактора, відповідно. Фіг. 1 ілюструє приклад схеми трифазного (фази А, В, С) реактора по заявленому технічному рішенню, що містить на стрижні 6 магнітопроводу 5 кожної фази мережеву обмотку 3 і керуючу обмотку 4. Стрижень 6 кожної фази складається з чотирьох послідовно розташованих по вертикалі елементів 7, розділених на дві паралельні частини - внутрішню частина 8 і зовнішню частину 9. Елементи 7 стрижня 6 відокремлені один від одного немагнітними зазорами 10 у внутрішній і зовнішній частинах 8, 9, відповідно. Мережева обмотка 3 складається з чотирьох секцій 2, з'єднаних послідовно зверху вниз. Початок напрямів намотування витків секцій 2 показаний на фіг.1 у вигляді крапок. Секції 2 мережевої обмотки З охоплюють внутрішні і зовнішні частини 8, 9 елементів 7 стрижня 6. Кінці (X, Y, Z) мережевої обмотки 3 різних фаз з'єднані по схемі "зірка" і заземлені в загальній точці. Керуюча обмотка 4 в кожній фазі складається з чотирьох секцій 2, які попарно (перша з другою і третя з четвертою) з'єднані зустрічно паралельно. Між собою ці пари з'єднані послідовно. Секції 2 мережевої обмотки 3 охоплюють тільки внутрішні частини 8 елементів 7 стрижня 6. До початків (а, в, с) і кінців (х, у, z) керуючих обмоток 4 різних фаз приєднано три керовані джерела 11 постійної напруги. На фіг. 1 клеми «+» і «-» заземлені через опори 12. Таке підключення забезпечує незалежне фазне регулювання струму реактора. Фіг. 2 ілюструє другий приклад схеми трифазного (фази А, В, С) реактора по заявленому технічному рішенню, що містить на стрижні 6 магнітопроводу 5 кожної фази мережеву обмотку 3 і керуючу обмотку 4. Стрижень 6 кожної фази складається з чотирьох послідовно розташованих по вертикалі елементів 7, розділених на внутрішню і зовнішню паралельні частини 8, 9, відповідно. Елементи 7 стрижня 6 відокремлені один від одного немагнітними зазорами 10 в зовнішній і внутрішній частинах 8, 9, відповідно. Мережева обмотка 3 складається з чотирьох секцій 2, попарно з'єднаних послідовно зверху вниз (перша секція 2 з'єднана послідовно з другою, а третя секція 2 - з четвертою). Між собою пари секцій 2 з'єднані паралельно. Початок напрямів намотування витків секцій 2 показаний на фіг.2 у вигляді крапок. Секції 2 мережевої обмотки 3 охоплюють внутрішні і зовнішні частини 8, 9 елементів 7 стрижня 6. Кінці (X, Y, Z) мережевої обмотки 3 різних фаз з'єднані по схемі "зірка" і заземлені в загальній точці. Керуюча обмотка 4 в кожній фазі складається з восьми секцій 2, які складаються з двох груп, з'єднаних зустрічно паралельно. До першої групи входять чотири секції 2, розташовані на внутрішніх частинах 8 елементів 7 стрижня 6, а до другої групи входять чотири секції 2, що охоплюють секції 2 першої групи. Секції 2 керуючої обмотки 4 охоплюють тільки внутрішні части8 елементів 7 стрижня 6. Початок (а, в, с) і кінці (х, у, z) керуючих обмоток 4 різних фаз з'єднані по схемі 4 UA 121325 U 5 10 15 20 25 30 35 40 45 50 55 60 "відкритий трикутник", в розрив якого за допомогою клем «+» і «-», заземлених через опори 12, приєднано одне кероване джерело 11 постійної напруги. Таке підключення забезпечує синхронне регулювання струму реактора в кожній з фаз. Фіг. 3 ілюструє третій приклад схеми трифазного реактора по заявленому технічному рішенню, що містить всі елементи магнітопроводу 5, мережевої обмотки 3 і керуючої обмотки 4, аналогічно показаному на фіг. 2, але який містить на стрижні 6 магнітопроводу 5 кожної фази додаткову компенсаційну обмотку 15. На фіг. 3 компенсаційна обмотка 15 складається з чотирьох послідовно сполучених секцій, що охоплюють елементи 7 магнітопроводу 5, і секції 2 керуючої обмотки 4. Початок (аk, вk, Сk) і кінці (хk, yk, zk) компенсаційних обмоток 15 різних фаз з'єднані по схемі "трикутник". Вершини "трикутника" компенсаційної обмотки 15, як показано на фіг. 3, за допомогою додаткових відведень 20 усередині електромагнітної частини реактора і додаткових введень 21 на його зовнішній поверхні приєднані до трансформатора 16 живлення напівпровідникового перетворювача 17, що перетворює змінний струм компенсаційної обмотки 15 в однонаправлений постійний струм. Управління значенням постійного струму здійснюється по сигналах автономної системи 19 автоматичного управління. Для захисту від перенапружень напівпровідникового перетворювача 17 його вхід з'єднаний з блоком 18 захисту від перенапружень. Таке виконання керованого джерела 11 постійної напруги забезпечує автономність експлуатації реактора без використання мережі власних потреб підстанції. Як напівпровідниковий перетворювач 17 можна використовувати тиристорний міст, виконаний на базі регульованих фазою кута включення керованих тиристорів. При цьому на тиристорах вибирається струм до 2000-3000A. При необхідній потужності реакторів, що встановлюються у високовольтних мережах (110 кВ і вище), від 10000кВА до 200000кВА, в заявленому пристрої установлена потужність керованого джерела 11 постійної напруги складатиме від 5 % до 10 % установленої потужності реактора, а не 100 % як в прототипі. Як блок 18 захисту від перенапружень можна використовувати обмежувачі перенапружень, що випускаються промисловістю. За рахунок схеми з'єднання секцій 2 керуючої обмотки 4, яка використана в пристрої, що заявляється, напруга на кінцях керуючої обмотки 4, наведена змінним магнітним потоком, низька. Тому можна використовувати обмежувачі перенапружень на напругу до 1кВ-5кВ. Як автономну систему 19 автоматичного управління можна використовувати мікропроцесорний пристрій, з'єднаний з напівпровідниковим перетворювачем 17 і вимірювальними трансформаторами 22 напруги і струму, які вимірюють напругу в точці підключення і струм мережевої обмотки 3 кожної фази реактора. З'єднання може здійснюватися за допомогою мідних кабелів (при передачі аналогових сигналів) або за допомогою оптоволоконних кабелів і бездротового зв'язку (при передачі цифрових сигналів). Програмне забезпечення автономної системи 19 автоматичного управління, що містить, наприклад, комп'ютер, контролери, мікропроцесори, забезпечує в режимі реального часу аналіз фактично зміряних сигналів напруги і струму мережевої обмотки 3. При цьому виконується оцінка відхилення цих даних від встановлених заздалегідь допустимих значень. Виробляються сигнали, які регулюють фази включення керованих тиристорів напівпровідникового перетворювача 17. Аналогічні автономні системи 19 автоматичного управління виготовляються в промисловості і використовуються в енергетиці. Фіг. 4 ілюструє різні приклади виконання елементів 7 магнітопроводу 5 у вигляді радіальних шихтованих дисків 13. На фіг. 4а показаний елемент, зібраний і склеєний з чотирьох окремих частин, що складаються з радіально шихтованих пластин: внутрішньої вертикальної частини, зовнішньої вертикальної частини, нижньої горизонтальної частини і верхньої горизонтальної частини. При такій збірці виходить диск, що має усередині порожнину. У цю порожнину, при збірці, перед установкою і склеюванням верхньої горизонтальної частини диска 13 встановлюють секції 2 керуючої обмотки 4. На фіг. 4в показаний елемент, у якого, на відміну і від елемента, показаного на фіг. 4а, є декілька вертикальних частин, відокремлених одна від одної немагнітними зазорами 10. На фіг.4в показаний елемент, у якого чотири внутрішні і чотири зовнішні вертикальні частини. У порожнину, утворену між вертикальними і горизонтальними частинами, при збірці елемента також встановлюються секції 2 керуючої обмотки 4. На фіг. 4с і фіг. 4d показані елементи магнітопроводу 5, аналогічні елементам магнітопроводу 5, показаним на фіг. 4а і фіг. 4в, але зібрані не з виготовлених окремо частин, а з шихтованих пластин в кожному радіальному перерізі. На фіг. 4с показано виконання вертикальних і нижньої горизонтальної частин у вигляді пластин, шихтованих в радіальних перерізах диска по схемі з косим стиком. 5 UA 121325 U 5 10 15 20 25 30 35 40 45 50 55 60 На фіг. 4d показано виконання вертикальних і нижньої горизонтальної частин диска 13 у вигляді цілісних пластин п-подібної форми. На фіг. 5 показаний загальний вид елементів магнітопроводу 5 у вигляді дисків 13 в зборі. На фіг. 5а показано виконання двох окремих дисків 13, кожен з яких може бути виконаний по схемі шихтовки, показаній на фіг. 4а, або фіг. 4с, або фіг. 4d. Диски 13 розділені немагнітним зазором 10. На фіг. 5 показано виконання складеного диска 13 з чотирма зовнішніми і чотирма внутрішніми вертикальними частинами 8, 9, який виконаний по схемі, приведеній на фіг. 4в. У дисках 13 можуть бути виконані канали 14 для проходу масла, що охолоджує секції 2 керуючої обмотки 4, розташовані усередині елементів 7 стрижня 6 і, при необхідності, для виведення кінців витків цих секцій 2. Канали 14 можуть розташовуватися на вертикальних або горизонтальних частинах дисків 13. Ці локальні канали 14 формують при виготовленні відповідних частин диска 13 за рахунок зменшення розмірів шихтованих пластин або їх видалення в окремих секторах частин диска 13. Початки намотування витків секцій 2 керуючої обмотки 4, розташовані усередині дисків 13 стрижня 6, на фіг.5а позначені як а1 і а2, закінчення намотування секцій 2 позначені як х1 і х2, відповідно, для першої і другої секцій 2. Секції 2 керуючої обмотки 4, як показано на фіг. 5в, з'єднані між собою усередині елемента 7 стрижня 6, а назовні, через канали 14, виведені початки (а1) і кінці (х1) витків групи секцій 2 керуючої обмотки 4. Детальніше розташування частин дисків 13 елементів 7 стрижня 6, секцій 2 мережевої обмотки 3 і керуючої обмотки 4 ілюструє фіг. 6, де показаний вид елементів 7 магнітопроводу 5 у вигляді дисків 13 в розрізі. На фіг. 6 показані елементи 7 стрижнів 6 магнітопроводу 5 у вигляді дисків 13, секції 2 керуючої обмотки 4, розташовані усередині цих дисків 13, секції 2 мережевої обмотки 3, розташовані зовні цих дисків 13. Початки секцій 2 по напряму намотування на фіг. 6 позначені: А1, А2, A3, А4 для мережевої обмотки 3 і а1, а2, а3, а4 для керуючої обмотки 4. Кінці секцій 2 по напряму намотування на фіг. 6 позначені: X1, Х2, Х3, Х4 для мережевої обмотки 3 і х1, х2, х3, х4 для керуючої обмотки 4. Різні напрями змінного струму в секціях 2 обмоток відмічені колами. На фіг. 6а показано виконання пристрою, що містить дві секції 2 керуючої обмотки 4, кожна з яких розташована усередині окремих дисків 13 і дві секції 2 мережевої обмотки 3. На фіг. 6в показано виконання пристрою, що містить чотири секції 2 керуючої обмотки 4, які розташовані усередині елемента, зібраного з чотирьох вертикальних внутрішніх дисків 13, чотирьох вертикальних зовнішніх дисків 13, верхнього і нижнього горизонтальних дисків 13. Початки a1, а2, а3, а4 керуючої обмотки 4 і кінці х1, х2, х3, х4 керуючої обмотки 4 в такому виконанні мають бути з'єднані між собою попарно зустрічно паралельно, як було показано на фіг. 1. В цьому випадку струм в цих секціях 2, наведений змінним магнітним полем від струму мережевої обмотки 3, матиме різний напрям в поряд розташованих по висоті секціях 2 керуючої обмотки 4. При цьому початки A1, А2, A3, А4 і кінці X1, Х2, Х3, Х4 секцій 2 мережевої обмотки 3 можна з'єднати як послідовно, так і паралельно. На фіг. 6с представлений пристрій, що відрізняється від пристрою, показаного на фіг. 6в, наявністю восьми секцій 2 керуючої обмотки 4, розділених на дві групи і розташованих концентрично по чотири секції 2 в кожній групі. Секції 2 усередині групи з'єднані послідовно, а між групами - зустрічно паралельно, як показано на схемі фіг. 2. При цьому напрями струму, наведеного змінним магнітним полем мережевої обмотки 3, матимуть різний напрям в поряд розташованих в радіальному напрямі секціях 2 керуючої обмотки 4. Фіг. 7 ілюструє різне виконання компоновки активної частини реактора по технічному рішенню, що заявляється. На фіг. 7. показана схема магнітопроводу 5 трифазного реактора, що містить три стрижні 6, два вертикальні бічні ярма і горизонтальні ярма. Ярма зібрані з пластин електротехнічної сталі по одній з відомих схем шихтовки, наприклад, по схемі з косим стиком пластин. Кожен стрижень 6 складається з декількох послідовно розташованих по висоті елементів 7. Крайні елементи 7 виконано у вигляді радіальних шихтованих дисків 13, звичайних для конструкцій високовольтних реакторів, а інші - у вигляді радіальних шихтованих дисків 13, що містять усередині секції 2 керуючої обмотки 4 (конструкція диска фіг. 4, фіг. 5). Секції 2 керуючої обмотки 4 охоплюють тільки внутрішні вертикальні частини дисків 13, а секції 2 мережевої обмотки 3 охоплюють як внутрішні, так і зовнішні частини. Елементи 7 стрижня 13 відокремлені немагнітними зазорами 10, які можуть виконуватися відомими способами, наприклад, за допомогою керамічних дистанційних прокладок. Секції 2 мережевої обмотки 3, показані на фіг. 7, з'єднані послідовно. Мережева обмотка 3 має введення з кінця. Початок намотування мережевих обмоток 3 різних фаз позначені А, В, С, а кінці X, У, Z. Кінці можуть бути з'єднані, наприклад, по схемі "зірка", як показано на фіг. 1, фіг. 2, фіг. 3. Секції 2 керуючої обмотки 4, що показана на фіг. 7а, з'єднані попарно по висоті зустрічно паралельно, аналогічно 6 UA 121325 U 5 10 15 20 25 30 35 40 45 50 55 60 показаному на фіг. 6а або фіг. 6в. Секції 2 керуючої обмотки 4, показані на фіг. 7в, з'єднані по групах зустрічно паралельно, аналогічно фіг. 6с. Кінці керуючих обмоток 4 різних фаз позначені на фіг. 7 малими буквами а, в, с та х, у, z. Ці кінці поєднуються до клем «+» і «-» керованого джерела 11 постійної напруги, наприклад по схемах фіг. 1, фіг. 2, фіг. 3. Керований електричний реактор працює таким чином. Мережеві обмотки 3 (див. фіг. 7) кожної фази реактора підключають до відповідних фаз електричної мережі. Кінці цих обмоток, як правило, з'єднують по схемі "зірка" і заземляють (фіг. 1). У витках секцій 2 мережевої обмотки 3 після такого з'єднання протікає змінний струм. Кінці секцій 2 керуючої обмотки 4 "а, в, с, х, у, z" підключають до керованого джерела 11 постійної напруги (фіг. 1, фіг. 2). Потім їх заземляють за допомогою активних опорів 12 (фіг. 1). Живлення керованого джерела 11 постійної напруги здійснюють або від мережі власних потреб станції, або за допомогою трансформатора 16 живлення (фіг. 3). У секціях 2 (фіг. 7) керуючої обмотки 4 після цього протікає змінний струм, наведений магнітним полем струму мережевої обмотки 3. Зустрічно паралельне з'єднання пар (фіг. 7а) або груп (фіг.7 в) секцій 2 керуючої обмотки 4 забезпечує те, що цей наведений змінний струм практично дорівнює нулю. У разі, коли напруга керованого джерела 11 постійної напруги (фіг. 1, фіг. 2) дорівнює нулю (режим холостого ходу), в керуючій обмотці 4 (фіг. 7) постійний струм також дорівнює нулю. У цьому режимі заявлений пристрій працює як звичайний шунтуючий реактор з немагнітними зазорами (фіг. 7). При цьому, струм мережевої обмотки 3 (фіг. 7) створює магнітний потік, у якого індукція магнітного поля має осьову Во і радіальну Вr складові. Осьова складова індукції Во проходить по елементах 7 стрижня 6 так, що її значення у вертикальних зовнішніх частинах 9 і вертикальних внутрішніх частинах 8 практично однакові. Активним перерізом стрижня 6 магнітопроводу 5 є сума активних перерізів вертикальних зовнішніх частин 9 і вертикальних внутрішніх частин 8 елемента 7 стрижня 6 магнітопроводу 5. Радіальна складова індукції Вr цього магнітного поля входить в бічну шихтовану поверхню зовнішньої частини 9 елемента 7 і не створює додаткові втрати в стрижні 6 магнітопроводу 5. Значення осьової складової Во в стрижні 6 вибирається так, що пластини електротехнічної сталі елементів 7 стрижня 6 не насичені. В цьому випадку магнітна проникність електротехнічної сталі і індуктивність мережевої обмотки 3 досягає максимального значення для конкретної геометрії і числа витків мережевої обмотки 3, а так само, для конкретних розмірів елементів 7 магнітопроводу 5 і немагнітних зазорів 10 між ними. У разі потреби зміни споживаної потужності і, відповідно, струму реактора по сигналах автономної системи 19 автоматичного управління (фіг. 3) змінюється напруга, що виробляється керованим джерелом 11 (фіг. 1, фіг. 2) постійної напруги, і по витках секцій 2 керуючої обмотки 4 тече струм. Цей струм створює в елементах 7 стрижня 6 магнітопроводу 5 додатковий магнітний потік, що проходить по вертикальних і горизонтальних частинах елементів 7 стрижня 6. Величина індукції Вm цього додаткового магнітного потоку (потоку підмагнічування) залежить від величини струму, що виробляється керованим джерелом 11 постійної напруги, конкретної геометрії і числа витків секцій 2 мережевої обмотки 3, а так само, конкретних розмірів елементів стрижня 6 магнітопроводу 5 і немагнітних зазорів 10 між ними. При цьому, результуючий магнітний потік - сума потоків змінного магнітного поля секцій 2 мережевої обмотки 3 і постійного магнітного поля секцій 2 керуючої обмотки 4 у вертикальних частинах елементів 7 стрижнів 6 магнітопроводу 5 буде різною. Величина індукції Bs цього результуючого потоку змінюватиметься в цих вертикальних частинах кожен напівперіод частоти змінного магнітного поля Во секцій 2 мережевих обмотки 3. Індукція Bs буде рівна або сумі індукцій (Во+Вm) або їх різниці (Во-Вm), залежно від напряму індукції змінного магнітного поля Во. Якщо струм в секціях 2 керуючої обмотки 4 досягає такого значення, при якому величина індукції Вт така, що сума Bs=(Bo+Bm), перевищує величину індукції Вn насичення електротехнічної сталі (Вn=2,0-2,2 тесел), то магнітна проникність відповідної вертикальної ділянки різко зменшується. Режим, в якому величина струму в секціях 2 керуючої обмотки 4 досягає величини, при якій сумарна індукція Bs=(Bo+Bm) більше величини індукції Вn технічного насичення електротехнічної сталі, а величина різниці (Во-Вm) менше Вn, далі називається "напівперіодним" режимом. Активний переріз елемента 7 стрижня 6 в напівперіодном режимі зменшується на величину площі перерізу відповідної вертикальної ділянки елемента 7 стрижня 6. Такі зміни приводять до різкого зменшення індуктивності мережевої обмотки 3 і, відповідно, зростанню споживаного реактором струму. При подальшому збільшенні постійної напруги і струму в секціях 2 керуючої обмотки 4, відповідно зросте результуюча індукція магнітного поля Bs, що проходить по горизонтальних частинах елемента 7 стрижня 6. Оскільки в горизонтальних частинах індукції Во і Вm направлені 7 UA 121325 U 5 10 15 20 25 30 35 40 45 50 практично перпендикулярно одна одній, то електротехнічна сталь в горизонтальних ділянках насититься, коли результуюча індукція в них Bs, приблизно рівна кореню квадратному з суми квадратів індукцій Во і Вm, перевищуватиме індукцію насичення стали Вn. Величина результуючої індукції Bs в горизонтальних ділянках елементів 7 стрижня 6 не залежить від зміни напівперіодів основної гармоніки. Режим, в якому, на додаток до напівперіодного режиму насичення одного з вертикальних ділянок, відбувається насичення горизонтальних ділянок елементів 7 стрижня 6 магнітопроводу 5, далі називатиметься напівперіодним режимом з подовжньо поперечним підмагнічуванням. У цьому режимі, додатково до напівперіодного, різко зменшується величина магнітної проникності горизонтальних ділянок елементів 7 стрижня 6 і індуктивність мережевої обмотки 3 додатково зменшується, а струм в ній додатково збільшується. При подальшому, досить значному, збільшенні постійної напруги і струму в секціях 2 керуючої обмотки 4 можна добитися такої величини результуючої індукції Bs, коли всі вертикальні і горизонтальні ділянки елементів 7 стрижня 6 магнітопроводу 5 будуть насичені. Такий режим називається далі режимом напівперіодного насичення. У цьому режимі магнітна проникність елементів 7 стрижня 6 і індуктивність мережевої обмотки 3 ще більше зменшаться, а споживаний струм ще більше збільшиться. Зменшення струму в секціях 2 керуючої обмотки 4 за допомогою регульованого джерела 11 постійної напруги, підключеного до цих секцій 2, приводить до зворотного процесу розмагнічування. При цьому, відносна магнітна проникність відповідних ділянок елементів 7 стрижня 6 магнітопроводу 5 змінюється від десятків тисяч в режимі холостого ходу до декількох одиниць в напівперіодному режимі. Зміна магнітної проникності елементів 7 стрижня 6 магнітопроводу 5 приводить до зміни індуктивності мережевої обмотки 3 і, отже, до зміни споживаної реактором реактивної потужності. Значне, до одного-двох десятків, зменшення відносної магнітної проникності елементів 7 стрижня 6 магнітопроводу 5 відбувається вже при переході від режиму холостого ходу до напівперіодного режиму і напівперіодного режиму з подовжньо поперечним підмагнічуванням. Цей перехід можна забезпечити при потужності керованого джерела 11 постійної напруги, рівній від 5 % до 10 % встановленої потужності реактора. Подальший перехід до повноперіодного режиму вимагає значного збільшення потужності керованого джерела 11 постійної напруги. При цьому, відносна магнітна проникність елементів 7 стрижня 6 змінюється трохи (від одного-двух десятків до декількох одиниць). У зв'язку з цим робочий діапазон зміни струму в секціях 2 керуючої обмотки 4 в заявленому пристрої вибирається в діапазоні від значень струму в одному з напівперіодних режимів (в більшості випадків цей режим вибирається номінальним) до значень цього струму в режимі холостого ходу. При цьому, зміна струму в мережевій обмотці 3 і її індуктивності відбувається у великому діапазоні, при малій встановленій потужності керованого джерела 11 постійної напруги (від 5 % до 10 % номінальної встановленої потужності реактора). Крім цього при необхідності можна збільшити напругу керованого джерела 11 постійної напруги на короткий час, забезпечивши форсований режим підмагнічування або розмагнічування. У заявленому пристрої досягається основний технічний результат: забезпечується можливість керованого низьковольтного підмагнічування локальних елементів стрижня магнітопроводу, що знижує рівень встановленої потужності електронної системи управління реактором при збереженні його функціональних можливостей, за рахунок чого підвищується надійність роботи пристрою з одночасним зниженням вартості реактора. За допомогою реактора, що заявляється, можна вирішувати різні проблеми електричних мереж - компенсацію реактивній потужності мережі, стабілізацію напруги в точці підключення реактора до мережі, зниження втрат в мережі та інші. Технічне рішення, що заявляється, може бути виготовлене на існуючому устаткуванні з використанням відомих матеріалів і засобів, що підтверджує промислову придатність заявленого пристрою. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 1. Керований електричний реактор, який містить електронну систему управління і електромагнітну частину, що містить в кожній з фаз реактора мережеву і керуючу обмотки, які складаються з намотаних проводами секцій, а також стрижневий магнітопровід, стрижні якого виконані з елементів, розташованих послідовно по висоті і розділених на дві паралельні частини - внутрішню і зовнішню, причому в зовнішній частині кожного елемента стрижня виконаний немагнітний зазор, витки проводів секцій мережевої обмотки охоплюють переріз 8 UA 121325 U 5 10 15 20 стрижня цілком, а витки проводів секцій керуючої обмотки охоплюють переріз стрижня частково, який відрізняється тим, що число секцій керуючої обмотки на стрижні парне, кінці розташованих рядом секцій в керуючій обмотці з'єднані паралельно, а напрям намотування в них - зустрічний, паралельні частини принаймні одного елемента стрижня реактора виконані у вигляді дисків з радіально шихтованих по периметру пластин електротехнічної сталі, відокремлених від інших елементів стрижня немагнітними зазорами як в зовнішній, так і у внутрішній частинах, причому секції керуючої обмотки розташовані усередині зовнішнього диска, а секції мережевої обмотки розташовані зовні зовнішнього диска, електронна система управління виконана у вигляді принаймні одного керованого джерела постійної напруги, вихідні клеми якого з'єднані з кінцями принаймні однієї пари секцій керуючої обмотки. 2. Реактор за п. 1, який відрізняється тим, що кінці керуючих обмоток різних фаз з'єднані по схемі "розімкнений трикутник", причому розімкнені кінці з'єднані з керованим джерелом постійної напруги. 3. Реактор за п. 1, який відрізняється тим, що на стрижнях магнітопроводу встановлені додаткові компенсаційні обмотки, кінці різних фаз яких з'єднані по схемі "трикутник". 4. Реактор за п. 1, який відрізняється тим, що кероване джерело постійної напруги містить послідовно з'єднані трансформатор живлення напівпровідникового перетворювача, напівпровідниковий перетворювач з блоком захисту від перенапружень на вході і автономну систему автоматичного управління. 5. Реактор за п. 4, який відрізняється тим, що компенсаційні або мережеві обмотки кожної фази містять додаткові відведення, з'єднані з трансформатором живлення керованого джерела постійної напруги. 9 UA 121325 U 10 UA 121325 U 11 UA 121325 U 12 UA 121325 U Комп’ютерна верстка В. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 13
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02J 3/00
Мітки: електричний, реактор, керований
Код посилання
<a href="https://ua.patents.su/15-121325-kerovanijj-elektrichnijj-reaktor.html" target="_blank" rel="follow" title="База патентів України">Керований електричний реактор</a>
Керований електричний реактор з поперечним підмагнічуванням
Номер патенту: 95404
Опубліковано: 25.12.2014
Автор: Конторович Леонід Нісонович
МПК: H01F 27/24, H01F 29/14
Мітки: керований, реактор, поперечним, електричний, підмагнічуванням
Формула / Реферат:
1. Керований електричний реактор з поперечним підмагнічуванням, який містить стрижень магнітопроводу, що виконаний у вигляді співвісно розташованих кілець із електротехнічної сталі, розділених немагнітними проміжками, основну мережну обмотку і з'єднану з керованим джерелом постійної напруги обмотку керування, вісь витків якої розташована в площині, перпендикулярній осі основної мережної обмотки, який відрізняється тим, що принаймні одне...
Керований електричний реактор з поперечним підмагнічуванням
Номер патенту: 111101
Опубліковано: 25.03.2016
Автор: Конторович Леонід Нісонович
МПК: H01F 27/24, H01F 29/14, H02J 3/18
Мітки: реактор, підмагнічуванням, поперечним, електричний, керований
Формула / Реферат:
1. Керований електричний реактор з поперечним підмагнічуванням, який містить стрижень магнітопроводу, що виконаний у вигляді співвісно розташованих кілець із електротехнічної сталі, розділених немагнітними проміжками, основну мережну обмотку і з'єднану з керованим джерелом постійної напруги обмотку керування, вісь витків якої розташована в площині, перпендикулярній осі основної мережної обмотки, який відрізняється тим, що щонайменше одне...
Електричний реактор з підмагнічуванням
Номер патенту: 104244
Опубліковано: 10.01.2014
Автор: Брянцев Алєксандр Міхайловіч
МПК: H01F 29/14, H01F 27/26
Мітки: електричний, підмагнічуванням, реактор
Формула / Реферат:
Електричний трифазний реактор з підмагнічуванням, що містить магнітну систему з вертикальних стрижнів, горизонтальних ярем, магнітних шунтів, обмотки, розміщені на кожному стрижні, та обмотки, що охоплюють два сусідніх стрижні, а також регульоване джерело постійної напруги, який відрізняється тим, що магнітна система виконана просторовою та складається з двох трифазних магнітопроводів, розташованих у паралельних площинах, між магнітопроводами...
Електричний реактор
Номер патенту: 38769
Опубліковано: 15.03.2004
Автори: Пулов Дмитро Степанович, Машошин Владислав Васильович, Кохан Павло Григорович, Кобилецький Анатолій Андрійович, Тарчуткін Олександр Леонідович
МПК: H01F 27/33, H01F 27/26
Мітки: реактор, електричний
Формула / Реферат:
1. Електричний реактор, що містить верхнє і нижнє ярма з пластин електротехнічної сталі, стрижні з магнітних вставок із немагнітними зазорами, встановлені співвісно між ярмами, обмотки, що встановлені мінімум на однім стрижні, набори пружних шайб і стяжні шпильки, що з'єднують ярма, який відрізняється тим, що стяжні шпильки встановлені симетрично щодо поперечних осей стрижнів із двох боків ярм у зоні стрижня із обмотками і сполучені з верхнім...
Електричний реактор
Номер патенту: 38768
Опубліковано: 15.03.2004
Автори: Тарчуткін Олександр Леонідович, Пулов Дмитро Степанович, Кохан Павло Григорович, Кобилецький Анатолій Андрійович, Машошин Владислав Васильович
МПК: H01F 3/00, H01F 37/00
Мітки: реактор, електричний
Формула / Реферат:
1. Електричний реактор, що містить бічні і торцеві ярма із пластин електротехнічної сталі, не менше одного стрижня з обмотками і шунти із покладених на ребро смуг електротехнічної сталі, який відрізняється тим, що шунти установлені по торцях обмоток із двох боків подовжньої осі торцевих ярм, вигнутих по дузі торця обмоток, і продовжені до внутрішніх площин бічних ярм.2. Реактор за п. 1, який відрізняється тим, що шунти установлені з...
Попередній патент: Штам базидіального гриба phellinus igniarius (fr.) quel. 29, який проявляє антибактеріальну активність щодо бактерій escherichia coli
Наступний патент: Узв-намивний фільтр із ультразвуковим активатором aqua-f170
Випадковий патент: Спосіб оцінювання і контролю якості друкарських форм і відбитків