Ергономічна поверхня захвату або передачі тягового зусилля
Формула / Реферат
1. Эргономическая поверхность захвата или передачи тягового усилия, которая включает основную поверхность, причем она дополнительно включает структуру устройства для захвата и передачи тягового усилия на основной поверхности, в котором имеется по меньшей мере один выступ, выходящий по высоте за пределы основной поверхности, отличающаяся тем, что каждый выступ имеет пропорции, конфигурацию и расположение, соответствующие неоднородным анатомическим характеристикам по меньшей мере участка поверхности конечности живого существа, а на его внешней контактирующей поверхности выполнено множество ребер, имеющих конфигурацию, имитирующую элементы кожи.
2. Поверхность захвата по п. 1, отличающаяся тем, что указанная конечность представляет собой человеческую ступню.
3. Поверхность захвата по п. 1, отличающаяся тем, что указанная конечность представляет собой кисть человеческой руки.
4. Поверхность захвата по п. 1, отличающаяся тем, что указанная конечность является соответствующей конечностью животного.
5. Поверхность захвата по п. 1, отличающаяся тем, что указанная имитируемая кожа представляет собой человеческую кожу.
6. Поверхность захвата по п. 1, отличающаяся тем, что указанные ребра расположены в основном в виде концентрических овалов, спиралей или завитков.
7. Поверхность захвата по п. 3, отличающаяся тем, что каждый указанный выступ имеет внешние поверхности контакта, причем указанные поверхности контакта имеют множество выполненных на них ребер.
8. Поверхность захвата по п. 7, отличающаяся тем, что указанные ребра расположены в конфигурации, имитирующей детали кожи.
9. Поверхность захвата по п. 8, отличающаяся тем, что указанная имитируемая кожа представляет собой человеческую кожу.
10. Поверхность захвата по п. 7, отличающаяся тем, что указанные ребра расположены в виде концентрических окружностей.
11. Поверхность захвата по п. 4, отличающаяся тем, что каждый указанный
выступ имеет внешние поверхности контакта, а указанные поверхности контакта имеют множество выполненных на них ребер.
12. Поверхность захвата по п. 11, отличающаяся тем, что указанные ребра расположены в конфигурации, имитирующей детали кожи.
13. Поверхность захвата по п. 12, отличающаяся тем, что указанная имитируемая кожа представляет собой кожу животного.
14. Поверхность захвата по п. 11, отличающаяся тем, что указанные ребра расположены в виде концентрических окружностей.
Текст
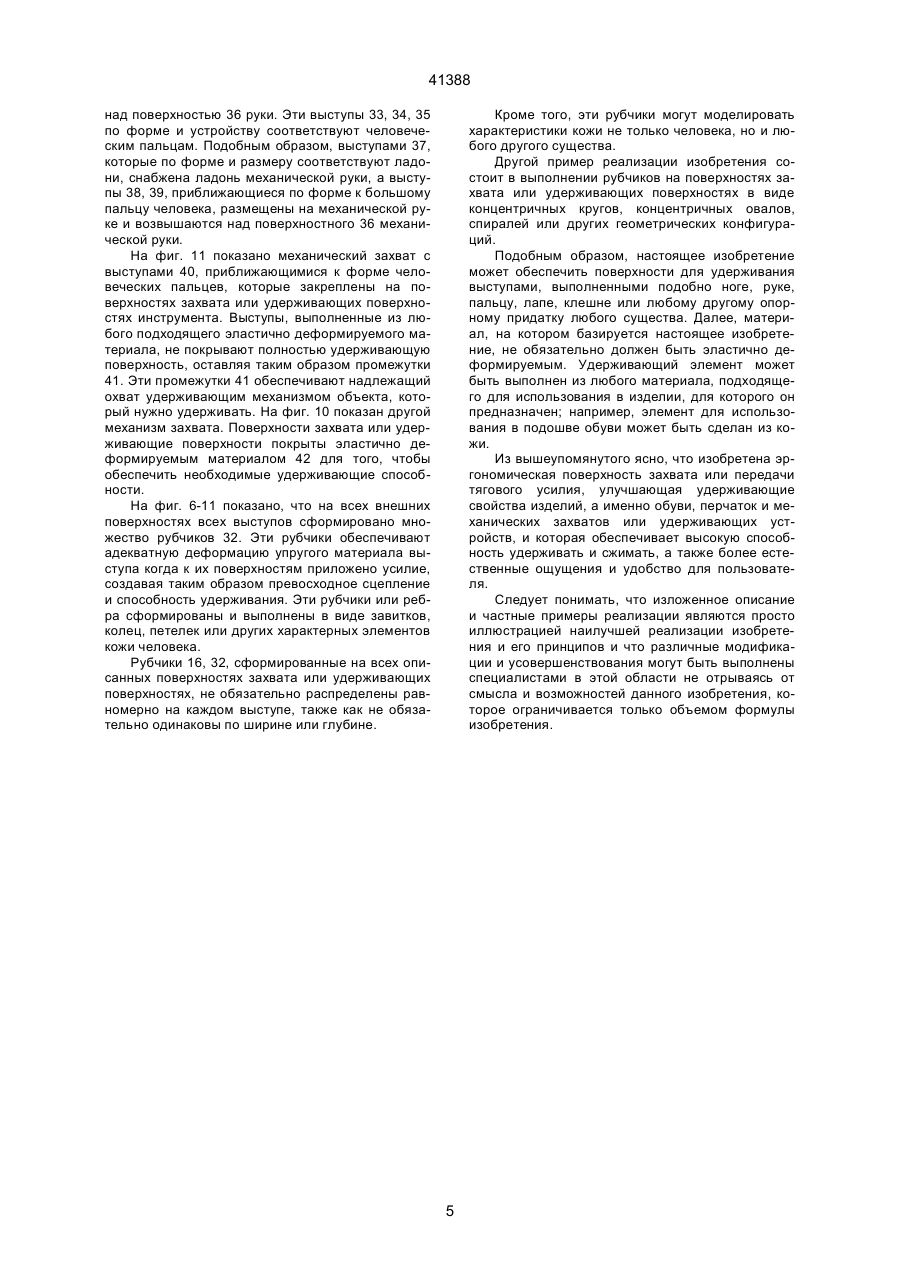
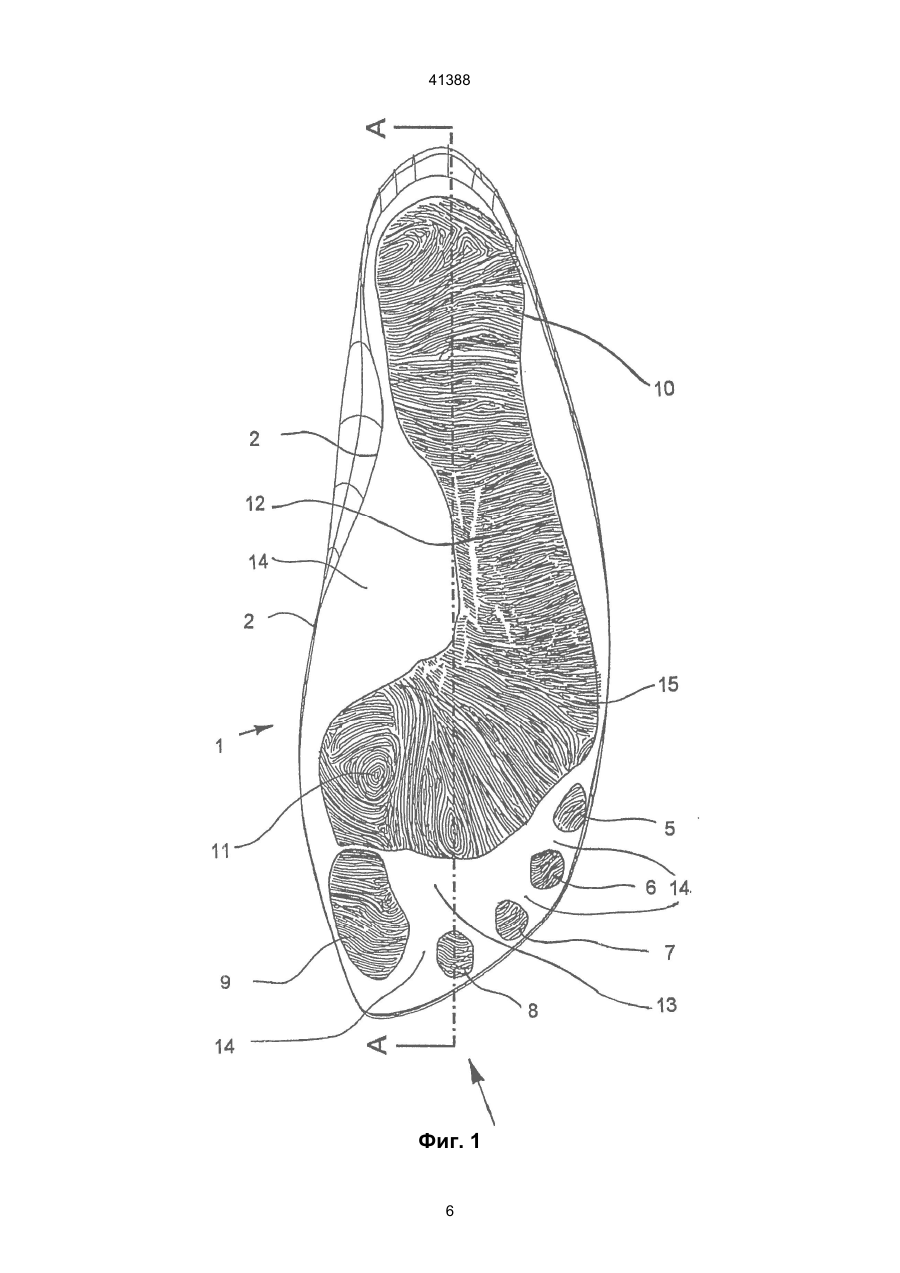
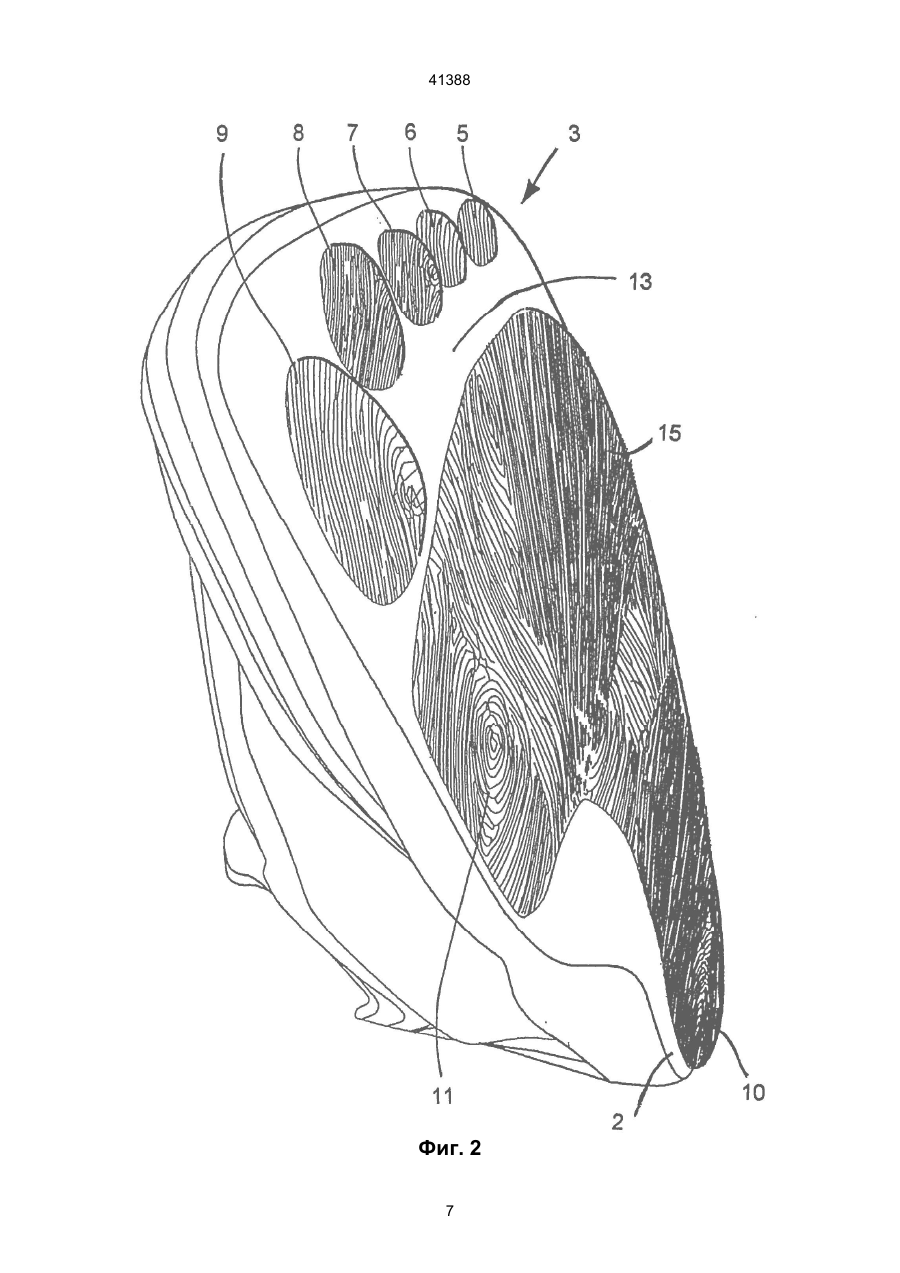
1. Эргономическая поверхность захвата или передачи тягового усилия, которая включает основную поверхность, причем она дополнительно включает структуру устройства для захвата и передачи тягового усилия на основной поверхности, в котором имеется по меньшей мере один выступ, выходящий по высоте за пределы основной поверхности, отличающаяся тем, что каждый выступ имеет пропорции, конфигурацию и расположение, соответствующие неоднородным анатомическим характеристикам по меньшей мере участка поверхности конечности живого существа, а на его внешней контактирующей поверхности выполнено множество ребер, имеющих конфигурацию, имитирующую элементы кожи. 2. Поверхность захвата по п. 1, отличающаяся тем, что указанная конечность представляет собой человеческую ступню. 3. Поверхность захвата по п. 1, отличающаяся тем, что указанная конечность представляет собой кисть человеческой руки. 4. Поверхность захвата по п. 1, отличающаяся тем, что указанная конечность является соответствующей конечностью животного. C2 (54) ЕРГОНОМІЧНА ПОВЕРХНЯ ЗАХВАТУ АБО ПЕРЕДАЧІ ТЯГОВОГО ЗУСИЛЛЯ 41388 ходные опорные и удерживающие способности. Поэтому очевидна потребность в подошве, с внешней поверхностью очень близко приближающейся к анатомии человеческой ступни. ПредыПатент № Пром. обр. США № 247,832 Пром. обр. США № 287,903 Пром. обр. США 295,114 Пром. обр. США 304,390 Пром. обр. США 309,670 Пром. обр. США 319,338 Пром. обр. США 337,428 Пат. США № 3,402,485 Пат. США №4,266,349 Пат. США №4,494,321 Пат. США №4,697,361 дущие попытки создать такую подошву оказались неадекватными. Известны следующие патенты, имеющие отношение к подошвам и стелькам обуви: Дата публ. 09.05.1978 Изобретат. Glasdow Название Подошва обуви 27.01.1987 Jones Подошва обуви 12.04.1988 Home Подошва обуви 07.11.1989 Nakago Подошва обуви 07.08.1990 Mendonca Подошва обуви 27.08.1991 Nakago Подошва обуви 20.07.1993 Alien Подошва обуви 24.09.1968 McMorrow 12.05.1981 Schmohl 22.01.1985 Lawlor Протектор для подошвы обуви животного Монолитная подошва для спортивной обуви Противоударная подошва для обуви 06.101987 Ganter Основа для обувного изделия высоте за пределы основной поверхности, а также углубления. Хотя данное решение и является наиболее эргономичным из известных решений, однако по опорным и удерживающим свойствам, оно значительно уступает конечности живого существа с ее многочисленными кривыми, контурами и углублениями, которые обеспечивают во время ходьбы или бега превосходные опорные и удерживающие способности. Таким образом, в основу изобретения поставлена задача создать эргономическую поверхность захвата или передачи тягового усилия, которая позволила бы обеспечить высокое качество захвата или удерживающих свойств изделий, к которым оно применимо, в частности, обуви, перчаток и механических захватов или удерживающих устройств, а также сделать их такими, чтобы при их использовании у пользователя возникали более комфортабельные и естественные ощущения. Поставленная задача решается тем, что эргономическая поверхность захвата или передачи тягового усилия, которая включает основную поверхность, дополнительно включает структуру устройства для захвата и передачи тягового усилия на основной поверхности, где имеется по меньшей мере один выступ, выходящий по высоте за пределы основной поверхности, которая обладает пропорциями, конфигурацией и расположением, соответствующими неоднородным анатомическим характеристикам по меньшей мере участка поверхности конечности живого существа, а на его внешней контактирующей поверхности выполнено множество ребер, имеющих конфигурацию, имитирующую элементы кожи. Целесообразно, чтобы указанная конечность представляла собой человеческую ступню, кисть Патент США на промышленный образец № 247,832, Glasgow, описывает орнамент основания обуви, имеющего форму ступни. Патент США на промышленный образец № 287,903, Jones, описывает орнамент основания обуви, имеющего форму лапы животного. Патент США на промышленный образец № 295,114, Home, описывает другой орнамент основания обуви, имеющего форму ступни. Патент США на промышленный образец № 309,670, Mendonca, также описывает орнамент основания обуви, имеющего форму ступни. В патенте США № 3,4022,485, McMorrow, описана обувь, в подошву которой включена подошва, имитирующая следы животных. В патенте США № 4,266,349, Schmohl, описана непрерывная стелька спортивной обуви, которая включает элементы структуры в виде окружностей в области подушечек и пятки стельки обуви, которые облегчают вращение ступни. Элементы этого рисунка грубо основаны на элементах человеческой ступни. Другие патенты внесенные в список, представляют подобные образцу подошвы обуви и указаны ради законченности. Наиболее близкое к даному решение известно из патента США № 4,697,361, Garner, публ. от 6.10.1987, А43В13/00; А43В13/04; А43В13/20, где описано основание обуви, выполненное из эластично сжимаемого материала, который пружинит под воздействием усилий, создаваемых ногой пользователя. Данное основание обуви содержит эргономическую поверхность сцепления, захвата или передачи тягового усилия, которая включает основную поверхность, причем она дополнительно включает структуру устройства для захвата и передачи тягового усилия на основной поверхности, в котором имеются выступы, выходящие по 2 41388 человеческой руки или соответствующую конечностью животного. Предпочтительно, указанная имитируемая кожа представляет собой человеческую кожу. Причем указанные ребра располагают в основном в виде концентрических овалов, спиралей или завитков. Наиболее предпочтительно, если каждый указанный выступ имеет внешние поверхности контакта, где указанные поверхности контакта имеют множество выполненных на них ребер. Целесообразно, чтобы указанные ребра были расположены в конфигурации, имитирующей детали кожи, а указанная имитируемая кожа представляла бы собой человеческую кожу. Указанные ребра могут быть расположены в виде концентрических окружностей. В случае, когда указанная конечность является соответствующей конечностью животного, каждый указанный выступ предпочтительно имеет внешние поверхности контакта, а указанные поверхности контакта имеют множество выполненных на них ребер. Причем указанные ребра располагают в конфигурации, имитирующей детали кожи, которая предпочтительно представляет собой кожу животного. Указанные ребра могут быть расположены в виде концентрических: окружностей. Настоящее изобретение реализует наиболее эргономичную поверхность захвата или передачи тягового усилия. Настоящее изобретение представляет решение, улучшающее удерживающие свойства изделий в которых оно применено, а именно обуви, перчаток и механических захватов. Более конкретно, это решение представляет эргономическую поверхность захвата или передачи тягового усилия, которая основана на натуральном отпечатке человеческой стопы и является неотъемлемая частью подошвы обуви. Основание человеческой ступни является не плоской поверхностью, а комбинацией различных анатомических элементов, отличающихся размером, формой и контурами. Предмет настоящего изобретения - это сформированная как неотъемлемая часть эластично деформируемой и упругой подошвы, включающая элементы и характеристики человеческой ноги. Подошва имеет многочисленные выступы, которые возвышаются над ее основанием таким образом, что создают смежные выпуклые области и впадины. Имеются выпуклости, соответствующие пяти пальцам, а также большие выступы, подобные подушечкам и пятке ступни, выполненные пропорционально человеческой ноги, создавая таким образом выступы различной высоты. Эти выступы создают углубленные участки, соответствующие областям между и позади пальцев ноги, а также другие углубления человеческой стопы. Эти впадины позволяют контактирующим с опорой выступам соответственно деформироваться в зависимости от усилия, создаваемого пользователем. Внешняя поверхность подошвы текстурирована мелкими рубчиками, подобными структуре кожи человеческой ступни, для того, чтобы еще больше улучшить характеристики опоры. Кроме того, изобретение может применяться для поверхностей захвата или удерживающих поверхностей перчаток или механических захватов. Ладонь и поверхности пальцев перчаток покрыты тонким, эластично деформируемым материалом, включающим форму, контуры и другие черты отпечатка ладони человека. Настоящее изобретение может быть применено не только к подошве обуви и перчаткам для людей, но также изготовителями и пользователями автоматизированного оборудования типа роботов, когда желательно качественное удерживание или захват. Кроме того, концепция изобретения может быть расширена на устройства для обеспечения высоких качеств захвата и мощного удерживания для многочисленных применений типа захватов инструментов, протезов или любых других подобного рода устройств. Целесообразно, чтобы элементы захвата и сцепления подошв обувных изделий имели форму и контур подошвы стопы. Целесообразно, чтобы внешние поверхности перчаток имели формы, близкие к форме человеческой руки или лапы животного. Перечень графических материалов: Фиг. 1 - вид в плане подошвы обуви в соответствии с настоящим изобретением. Фиг. 2 - изометрическое изображение обуви на фиг. 1 с подошвой по настоящему изобретению. Фиг. 3 - вид сбоку обуви на фиг. 1 с подошвой по настоящему изобретению. Фиг. 4 - увеличенный вид сбоку участка подошвы на фиг. 3, показывающий поверхностную текстуру подошвы. Фиг. 5 - поперечное сечение вида подошвы по линии А-А на фиг. 1. Фиг. 6 - вид в плане перчатки, имеющей альтернативную поверхность захвата по настоящему изобретению. Фиг. 7 - увеличенное изометрическое изображение части пальца перчатки, показывающее поверхностную текстуру перчатки. Фиг. 8 - изометрическое изображение перчатки, имеющей поверхность захвата по настоящему изобретению. Фиг. 9 - изометрическое изображение механического захвата, моделирующего человеческую руку и имеющего поверхность захвата по настоящему изобретению. Фиг. 10 - изометрическое изображение альтернативного механического захвата, имеющего поверхность захвата по настоящему изобретению. Фиг. 11 - изометрическое изображение другого механического захвата, имеющего поверхность захвата по настоящему изобретению. Фиг. 12 - изометрическое изображение еще одного механического захвата, имеющего поверхность захвата по настоящему изобретению. Фиг. 13 - увеличенное изометрическое изображение части механического захвата, показывающего поверхностную текстуру. На фиг. 1, 2, и 3 показана подошва обуви 1, выполненная из эластичного деформируемого материала. Подошва имеет основную или базовую поверхность 2, которая является существенно гладкой и плоской с передней частью 3, которая соответствует области пальцев ноги, и заднюю часть 4, соответствующую области пятки. Выступы 5, 6, 7, 8, 9, 10, 11 сформированы как неотъемлемая часть подошвы и возвышаются над поверхно 3 41388 стью основы 2 и имеют разнообразные формы, контуры и высоты. На фиг. 1 показана передняя часть подошвы 3 с пятью выступами 5, 6, 7, 8, 9, размер, форма и расположение которых соответствуют подушечкам пальцев ноги человеческой ступни. Другие, большие выступы 10, 11, занимают существенную часть подошвы, от пятки до подушечек стопы. Выступы необязательно имеют одинаковую высоту 8а, 10а, 11а, на которую они возвышаются над поверхностью основы 2, как это показано на Фиг. 5. Высота каждого выступа изменяется в соответствии с трехмерными вариациями анатомии человеческой ноги. Изменение высоты выступа может также зависеть от величине нагрузки, прикладываемой к соответствующей области подошвы при ходьбе или спортивной активности. Например, высота выступа 10а в пятке больше, чем высота выступа 12а в области подъема. Это изменение в высоте выступа, основанное на анатомии ноги, приводит к появлению областей без выступов или с маленькими выступами, создавая промежутки и разрывы 13, 14, как это показано на фиг. 1. Эти впадины 13, 14 соответствуют участкам человеческой ноги, которые не обязательно непосредственно входят в контакт с землей или полом, когда человек стоит, например, в подъеме. Однако, эти вогнутые области человеческой ноги очень важны для ходьбы или бега, потому что они позволяют пальцам зацепляться за поверхность земли или пола под воздействием усилий, возникающих при ходьбе, создавая таким образом превосходное сцепление. Подобным образом впадины 13, 14 в изобретенной подошве позволяют контактирующим с землей выступам приобретать деформацию в зависимости от силы или усилий, прилагаемых пользователем обуви. Эта деформация также обеспечивает превосходное сцепление и более естественные ощущения для пользователя обуви. На фиг. 4 показано увеличенное изображение внешней поверхности выступов 5, 15. На опорных поверхностях всех выступов сформировано множество мелких рубчиков 16, которые воспроизводят характеристики отпечатка человеческой кожи. Эти рубчики позволяют опорным поверхностям эластично деформируемой подошвы лучше удерживать поверхность хождения, создавая таким образом качественное сцепление с нею. В предпочтительном варианте реализации изобретения поверхность захвата и удерживающая поверхность является неотъемлемой частью подошвы обуви, изготовлена из эластично деформируемого материала, который является обычным для спортивной обуви, типа каучука, поливинилхлорида, полиуретана или любого подходящего синтетического вещества. Подошва присоединена непосредственно к верху обуви путем отливки или наплавления, включая все особенности структуры поверхности захвата, включая основу, выступы, промежутки и ребра. Настоящее изобретение может использоваться не только в обуви для людей, но также применимо везде, где требуется удерживание и сцепление, например, на перчатках, инструментах или опорах или манипуляторах автоматизированных машин или роботов. Разработка технологически совершенных машин, способных к выполнению механических задач, продолжает расширяться. Изобретенный элемент захвата и удерживания может быть применен к любому элементу устройства или механизма, для которого желательна высокая способность захвата или удерживания. На фиг. 6-11 показаны другие варианты использования, включая выступы в виде рук или пальцев на поверхностях захвата или удерживающих поверхностях перчаток или других устройств захвата, типа механических рук роботов, автоматизированных машин или инструментов захвата. На фиг. 12 и 13 показан другой вариант реализации изобретения, который применяется для поверхности захвата или удерживающей поверхности механического устройства. Устройство имеет рубчики или ребра 17, сформированные непосредственно на поверхности захвата 18, и не имеет выступов на поверхностях. Эти рубчики 17 имеют конфигурацию, которая приближается к характеристике отпечатка человеческой кожи. На фиг. 8 показана перчатка 19 с базовой или основной поверхностью 20. Выступающие над поверхностью основы 20 многочисленные выступы соответствуют форме и контуру ладони и пальцев человеческой руки. Ладонные выступы 21 расположены в зоне перчатки, соответствующей ладони человека. На каждом из четырех пальцевых участков перчатки имеются раздельные и различные выступы 22, 23, 24, соответствующие трем фалангам каждого пальца человека, каждая из которых образована костью и двумя суставами. Выступы 25 и 26 по форме и устройству подобны внутренней поверхности большого пальца человека и возвышаются над поверхностью основы 20 для большого пальца перчатки. Поскольку эти выступы отделены друг от друга, на областях поверхности перчатки между выступами образуются промежутки 27, 28, 29, 30. Эти промежутки обеспечивают надлежащее смыкание перчатки вокруг удерживаемого предмета и адекватную деформацию деформируемых поверхностей выступов, создавая таким образом высокие удерживающие свойства. Альтернативно, выступы на поверхности основы 20 перчатки 19 могут быть не отделены друг от друга, а соединены как показано на фиг. 7. Большой единый выступ 31 возвышается над поверхностью основы 20 перчатки 19. Этот выступ соответствует форме и конфигурации человеческой руки. Внешняя поверхность выступа 31 имеет рубчики 32, которые выполнены так, что воспроизводят характеристики человеческой кожи. Подобным образом выступы, возвышающиеся на базовой поверхностью 2 подошвы обуви 1 могут быть не отделены друг от друга, а соединены и образовывать единый большой выступ, который по размерам, форме и расположению приближается к человеческой ноге. На фиг. 9 показана механическая рука, которая может применяться в роботах или частях автоматизированных машин. Выступы 33, 34, 35, выполненные из любого подходящего эластично деформируемого и упругого материала, типа того, который используют для подошв спортивной обуви, приклеены к механической руке, возвышаясь 4 41388 над поверхностью 36 руки. Эти выступы 33, 34, 35 по форме и устройству соответствуют человеческим пальцам. Подобным образом, выступами 37, которые по форме и размеру соответствуют ладони, снабжена ладонь механической руки, а выступы 38, 39, приближающиеся по форме к большому пальцу человека, размещены на механической руке и возвышаются над поверхностного 36 механической руки. На фиг. 11 показано механический захват с выступами 40, приближающимися к форме человеческих пальцев, которые закреплены на поверхностях захвата или удерживающих поверхностях инструмента. Выступы, выполненные из любого подходящего эластично деформируемого материала, не покрывают полностью удерживающую поверхность, оставляя таким образом промежутки 41. Эти промежутки 41 обеспечивают надлежащий охват удерживающим механизмом объекта, который нужно удерживать. На фиг. 10 показан другой механизм захвата. Поверхности захвата или удерживающие поверхности покрыты эластично деформируемым материалом 42 для того, чтобы обеспечить необходимые удерживающие способности. На фиг. 6-11 показано, что на всех внешних поверхностях всех выступов сформировано множество рубчиков 32. Эти рубчики обеспечивают адекватную деформацию упругого материала выступа когда к их поверхностям приложено усилие, создавая таким образом превосходное сцепление и способность удерживания. Эти рубчики или ребра сформированы и выполнены в виде завитков, колец, петелек или других характерных элементов кожи человека. Рубчики 16, 32, сформированные на всех описанных поверхностях захвата или удерживающих поверхностях, не обязательно распределены равномерно на каждом выступе, также как не обязательно одинаковы по ширине или глубине. Кроме того, эти рубчики могут моделировать характеристики кожи не только человека, но и любого другого существа. Другой пример реализации изобретения состоит в выполнении рубчиков на поверхностях захвата или удерживающих поверхностях в виде концентричных кругов, концентричных овалов, спиралей или других геометрических конфигураций. Подобным образом, настоящее изобретение может обеспечить поверхности для удерживания выступами, выполненными подобно ноге, руке, пальцу, лапе, клешне или любому другому опорному придатку любого существа. Далее, материал, на котором базируется настоящее изобретение, не обязательно должен быть эластично деформируемым. Удерживающий элемент может быть выполнен из любого материала, подходящего для использования в изделии, для которого он предназначен; например, элемент для использования в подошве обуви может быть сделан из кожи. Из вышеупомянутого ясно, что изобретена эргономическая поверхность захвата или передачи тягового усилия, улучшающая удерживающие свойства изделий, а именно обуви, перчаток и механических захватов или удерживающих устройств, и которая обеспечивает высокую способность удерживать и сжимать, а также более естественные ощущения и удобство для пользователя. Следует понимать, что изложенное описание и частные примеры реализации являются просто иллюстрацией наилучшей реализации изобретения и его принципов и что различные модификации и усовершенствования могут быть выполнены специалистами в этой области не отрываясь от смысла и возможностей данного изобретения, которое ограничивается только объемом формулы изобретения. 5 41388 Фиг. 1 6 41388 Фиг. 2 7 41388 Фиг. 3 8 41388 Фиг. 4 9 41388 Фиг. 5 10 41388 Фиг. 6 Фиг. 7 11 41388 Фиг. 8 Фиг. 9 12 41388 Фиг. 10 Фиг. 11 13 41388 Фиг. 12 Фиг. 13 14 41388 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 15
ДивитисяДодаткова інформація
Назва патенту англійськоюErgonomic surface of gripping or of tractive force transfer
Автори англійськоюMinges Donald L.
Назва патенту російськоюЭргономическая поверхность захвата или передачи тягового усилия
Автори російськоюМингес Дональд Л.
МПК / Мітки
МПК: A41D 19/00, A43B 13/14
Мітки: захвату, поверхня, передачі, ергономічна, тягового, зусилля
Код посилання
<a href="https://ua.patents.su/15-41388-ergonomichna-poverkhnya-zakhvatu-abo-peredachi-tyagovogo-zusillya.html" target="_blank" rel="follow" title="База патентів України">Ергономічна поверхня захвату або передачі тягового зусилля</a>
Спосіб формування тягового зусилля у поляризованій електромагнітній системі
Номер патенту: 19092
Опубліковано: 25.12.1997
Автори: Мухомор Володимир Михайлович, Місєвря Іван Васильович, Макаров Сергій Олегович
МПК: F16K 31/02
Мітки: електромагнітний, формування, системі, тягового, поляризованій, спосіб, зусилля
Формула / Реферат:
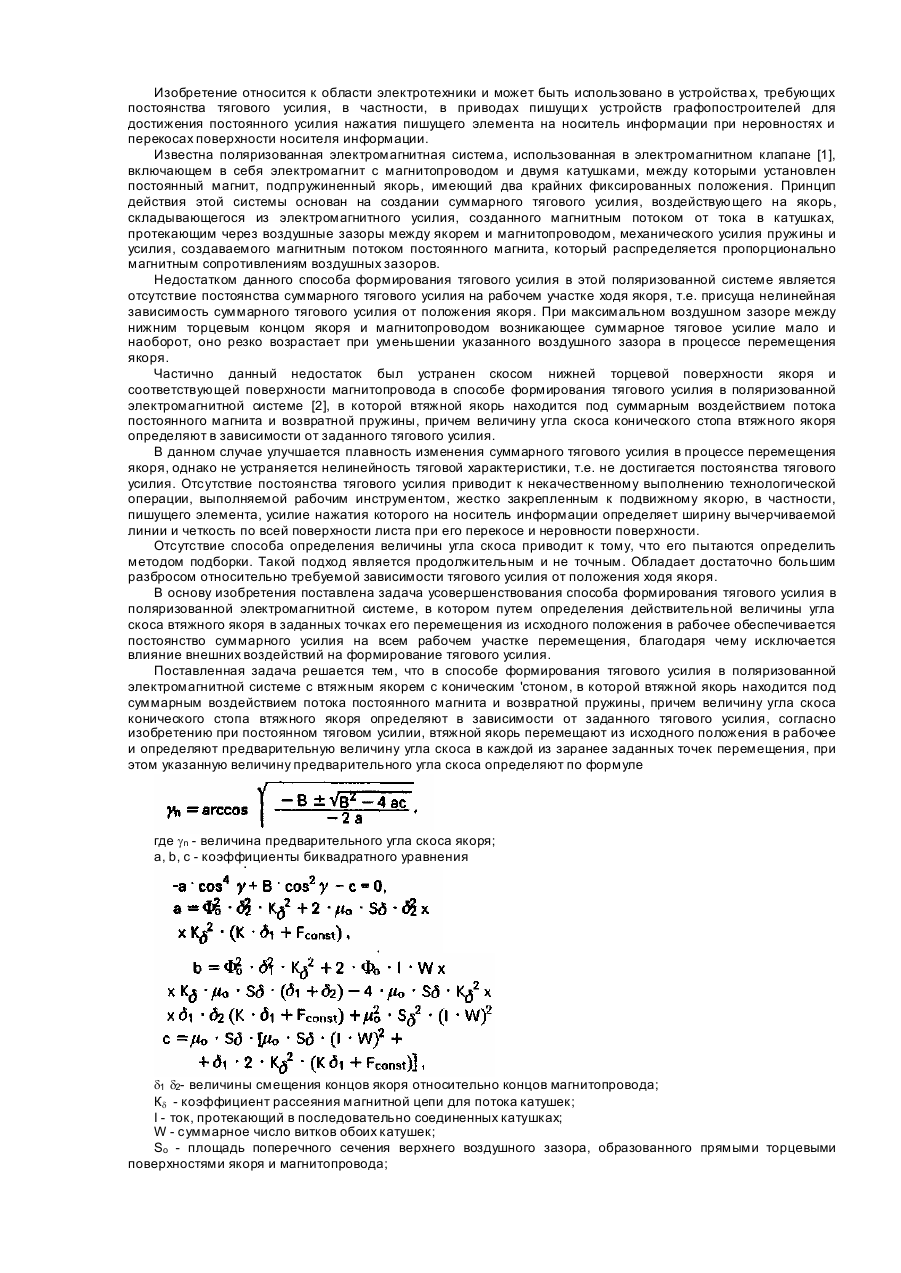
Способ формирования тягового усилия в поляризованной электромагнитной системе с втяжным якорем с коническим стопом, в которой втяжной якорь находится под суммарным воздействием потока постоянного магнита и возвратной пружины, причем величину угла скоса конического стопа втяжного якоря определяют в зависимости от заданного тягового усилия, отличающийся тем, что при постоянном тяговом усилии: втяжной якорь последовательно перемещают из...
Поверхня теплообміну
Номер патенту: 12846
Опубліковано: 28.02.1997
Автори: Куликов Юрій Андрійович, Лахно Валерій Анатолійовіч
МПК: F28D 9/00, F28D 7/00, F28F 1/00
Мітки: теплообміну, поверхня
Формула / Реферат:
(57) Поверхность теплообмена, содержащая волнистый профиль, образованный последовательно чередующимися выступами и впадинами, имеющими одинаковые размеры относительно осевой линии, а смежные поверхности образуют диффузорно-конфузорные каналы, отличающаяся тем, что выступы имеют острую кромку и их высота равна h=(1,5...2) d, где d - толщина пограничного слоя, а расстояние между вершинами соседних выступов равно S=(12...15)h.
Рульова поверхня літального апарату з осьовою компенсацією і ваговим балансуванням у вигляді вантажу
Номер патенту: 8413
Опубліковано: 29.03.1996
Автори: Овчинніков Фелікс Олександрович, Загинай Віктор Васильович, Верещак Федір Павлович
МПК: B64C 9/00
Мітки: рульова, поверхня, ваговим, компенсацією, балансуванням, апарату, вантажу, літального, вигляді, осьовою
Формула / Реферат:
Рулевая поверхность летательного аппарата с осевой компенсацией и весовой балансировкой в виде грузов, расположенных в носке рулевой поверхности, содержащая поперечный силовой набор, соединенный с лонжероном, расположенным впереди оси вращения рулевой поверхности и снабженным узлами ее навески, отличающаяся тем, что, с целью уменьшения веса рулевой поверхности, лонжерон выполнен в виде отдельных частей балансировочных грузов, концы...
Рульова поверхня літального апарату
Номер патенту: 16312
Опубліковано: 29.08.1997
Автор: Кулик Віталій Никифорович
МПК: B64C 9/00
Мітки: апарату, поверхня, рульова, літального
Формула / Реферат:
Рулевая поверхность летательного аппарата, содержащая обшивку и балансировочный груз, выполненный в виделонжерона, отличающаяся тем, что, с целью снижения массы, передняя кромка обшивки выполнена с посадочной поверхностью, плоскость которой перпендикулярна плоскости хорд рулевой поверхности, а лонжерон расположен впереди обшивки и выполнен в виде профиля таврового сечения, с ребром в плоскости хорд и основанием, закрепленным на посадочной...
Бігова поверхня лижі
Номер патенту: 26388
Опубліковано: 30.08.1999
Автор: Пібер Алоіс
Формула / Реферат:
Беговая поверхность лыжи, в частности беговой лыжи, в которой, по меньшей мере, на части длины и ширины лыжи выполнены надрезы на беговой поверхности в форме ступенчатых уступов, расположенных друг за другом в продольном направлении лыжи, имеющих в продольном сечении пилообразный профиль, препятствующий отдаче при движении, отличающаяся тем, что в зоне уступа, плоско поднимающегося в продольном направлении лыжи, расположена дополнительная...
Наступний патент: Пристрій зниження напруги
Випадковий патент: Ємнісний негасенсор з частотним виходом