Спосіб формування тягового зусилля у поляризованій електромагнітній системі
Номер патенту: 19092
Опубліковано: 25.12.1997
Автори: Мухомор Володимир Михайлович, Місєвря Іван Васильович, Макаров Сергій Олегович


Формула / Реферат
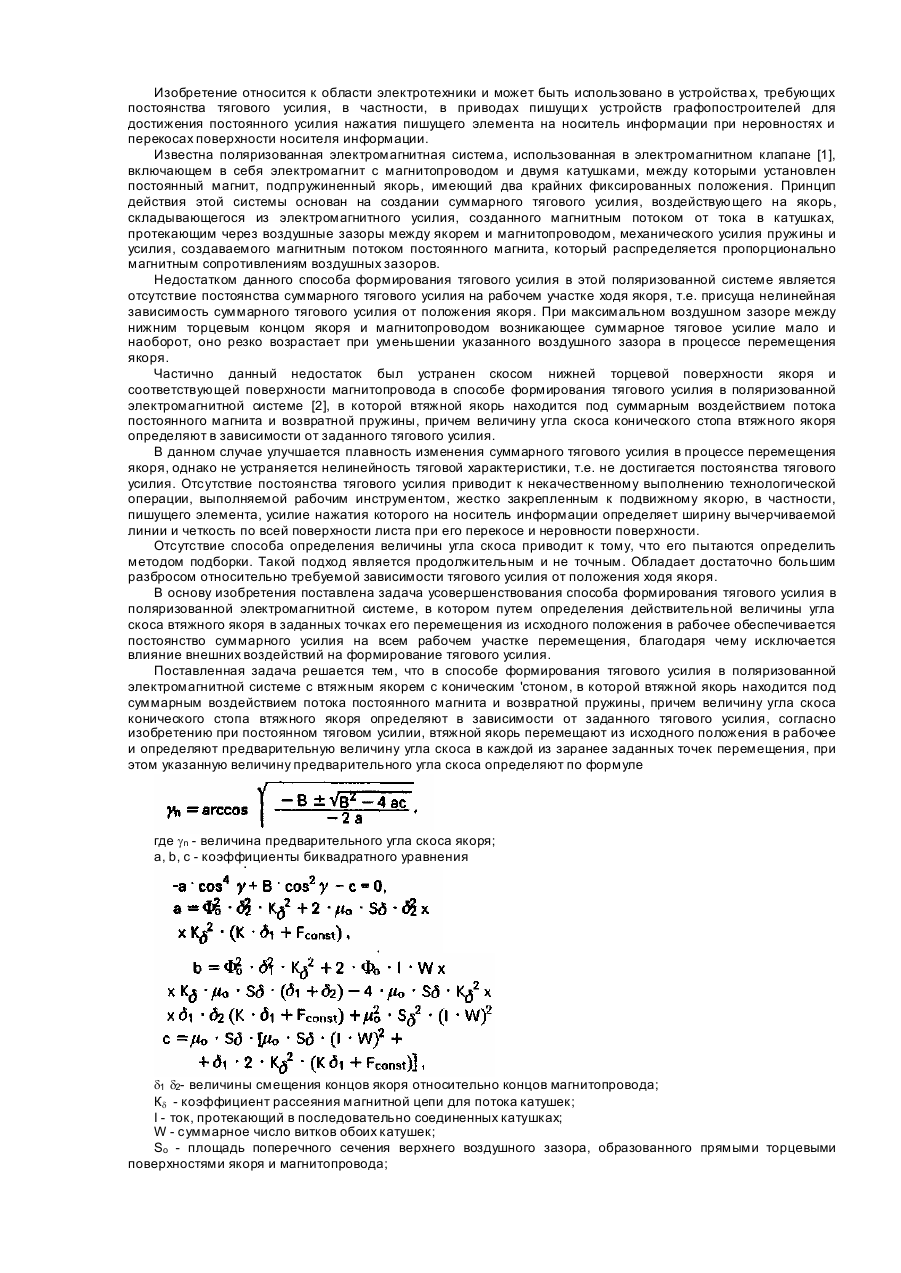
Способ формирования тягового усилия в поляризованной электромагнитной системе с втяжным якорем с коническим стопом, в которой втяжной якорь находится под суммарным воздействием потока постоянного магнита и возвратной пружины, причем величину угла скоса конического стопа втяжного якоря определяют в зависимости от заданного тягового усилия, отличающийся тем, что при постоянном тяговом усилии: втяжной якорь последовательно перемещают из исходного положения в рабочее и определяют предварительную величину угла скоса в каждой из заранее заданных точек перемещения, при этом величину предварительного угла скоса определяют по формуле
где gn -величина предварительного угла скоса якоря;
а, b, с - коэффициенты биквадратного уравнения
d1, d2 — величины смещения концов якоря относительно концов якоря относительно концов магнитопровода;
Кd - коэффициент рассеяния магнитной цепи для потока катушек;
I - ток, протекающий в последовательно соединенных катушках;
W - суммарное число витков обоих катушек;
Sd - площадь поперечного сечения верхнего воздушного зазора, образованного прямыми торцевыми поверхностями якоря и магнитопровода;
μ0 - магнитная постоянная;
Фо - магнитный поток постоянного магнита;
К - коэффициент жесткости упругого элемента;
Fпост - постоянное заданное тяговое усилие;
и находят величину действительного угла скоса втяжного якоря по среднеарифметическому значению суммы величин предварительных углов скоса.
Текст
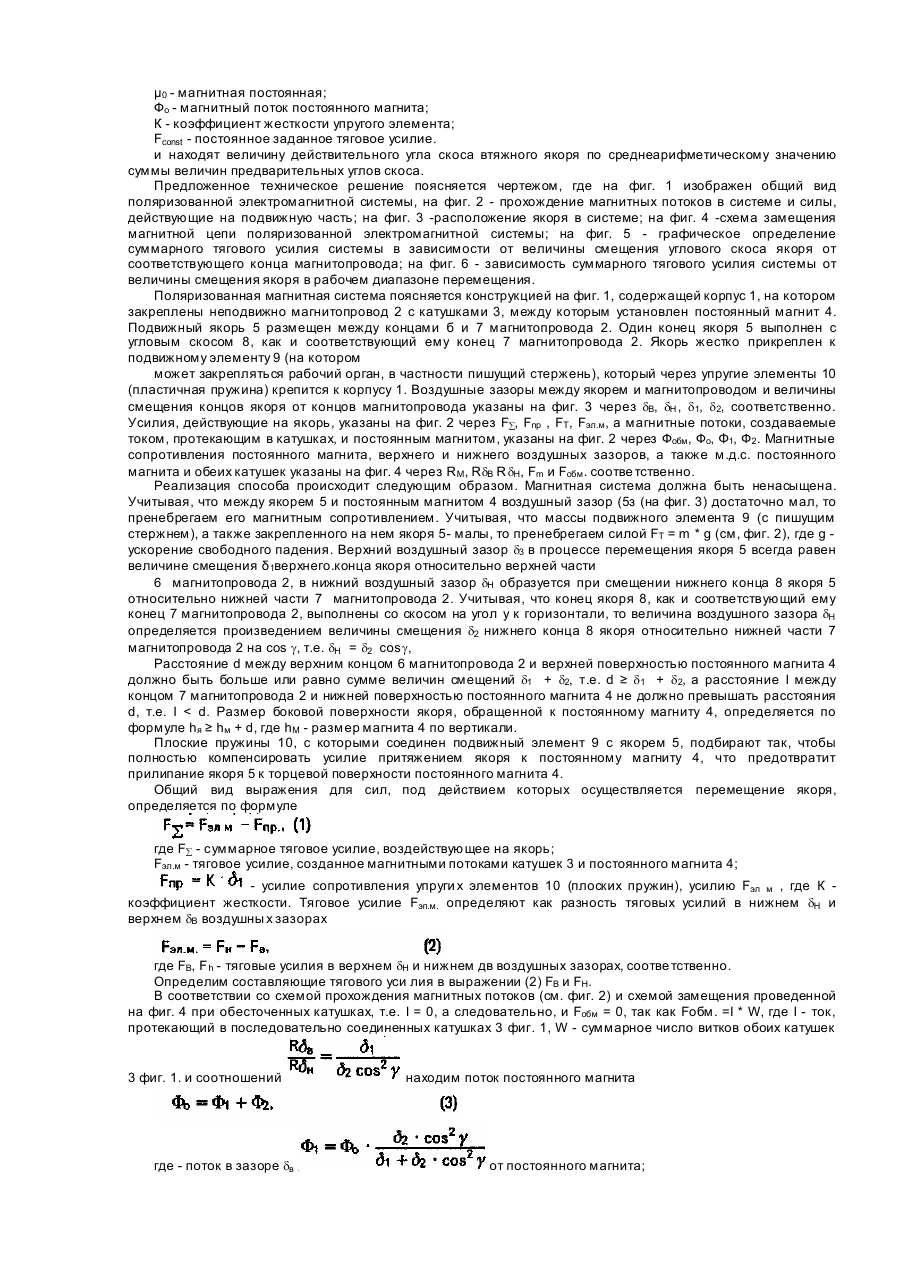
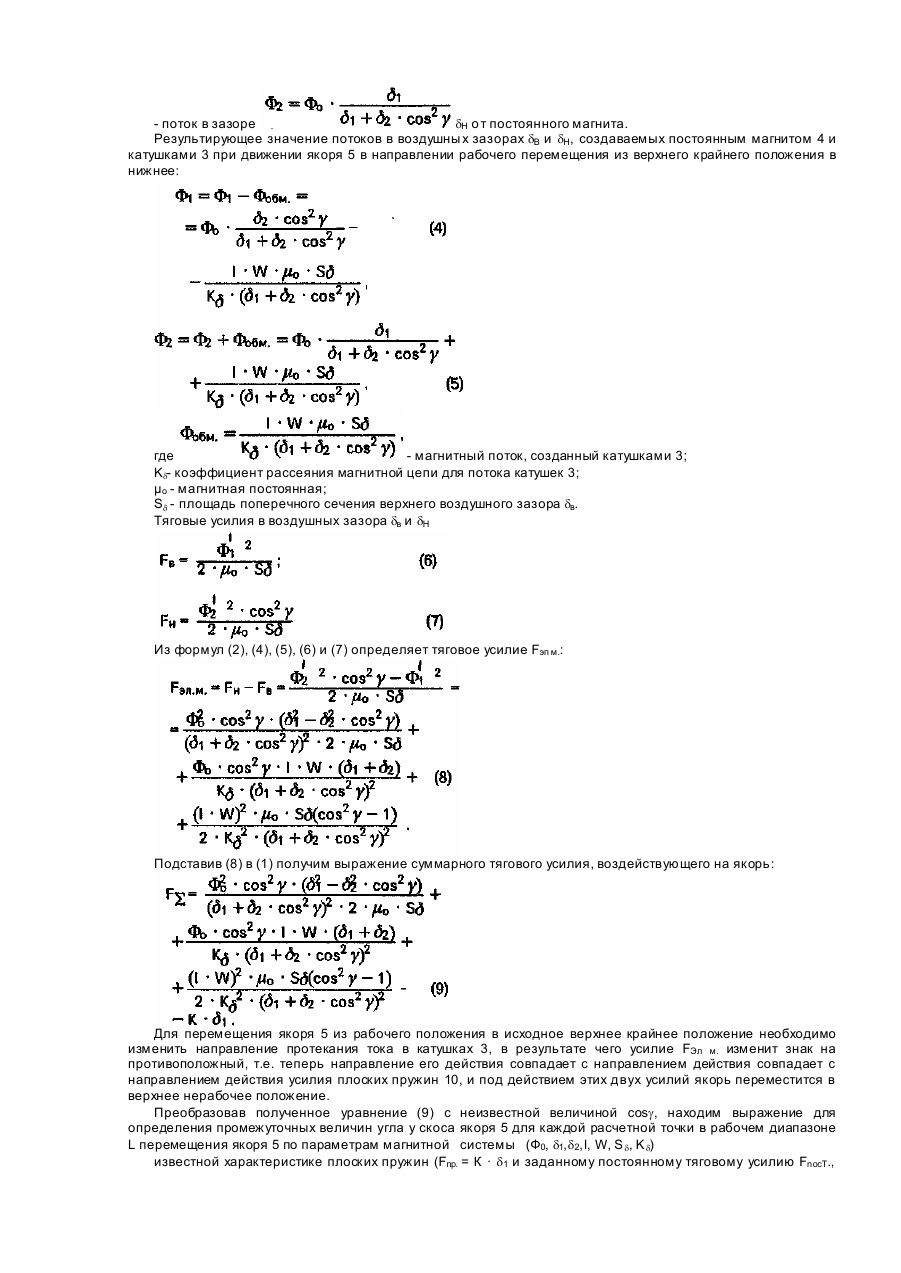
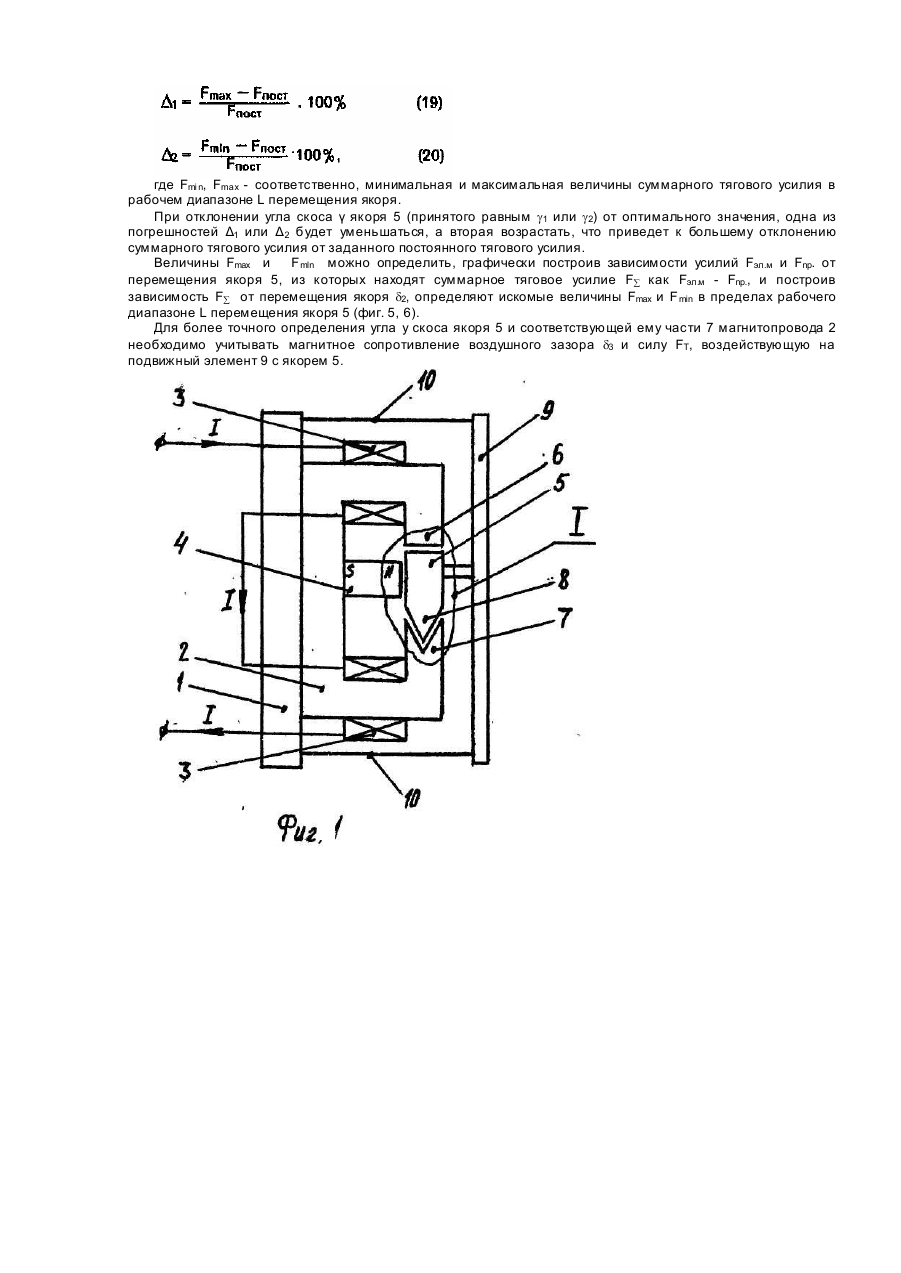
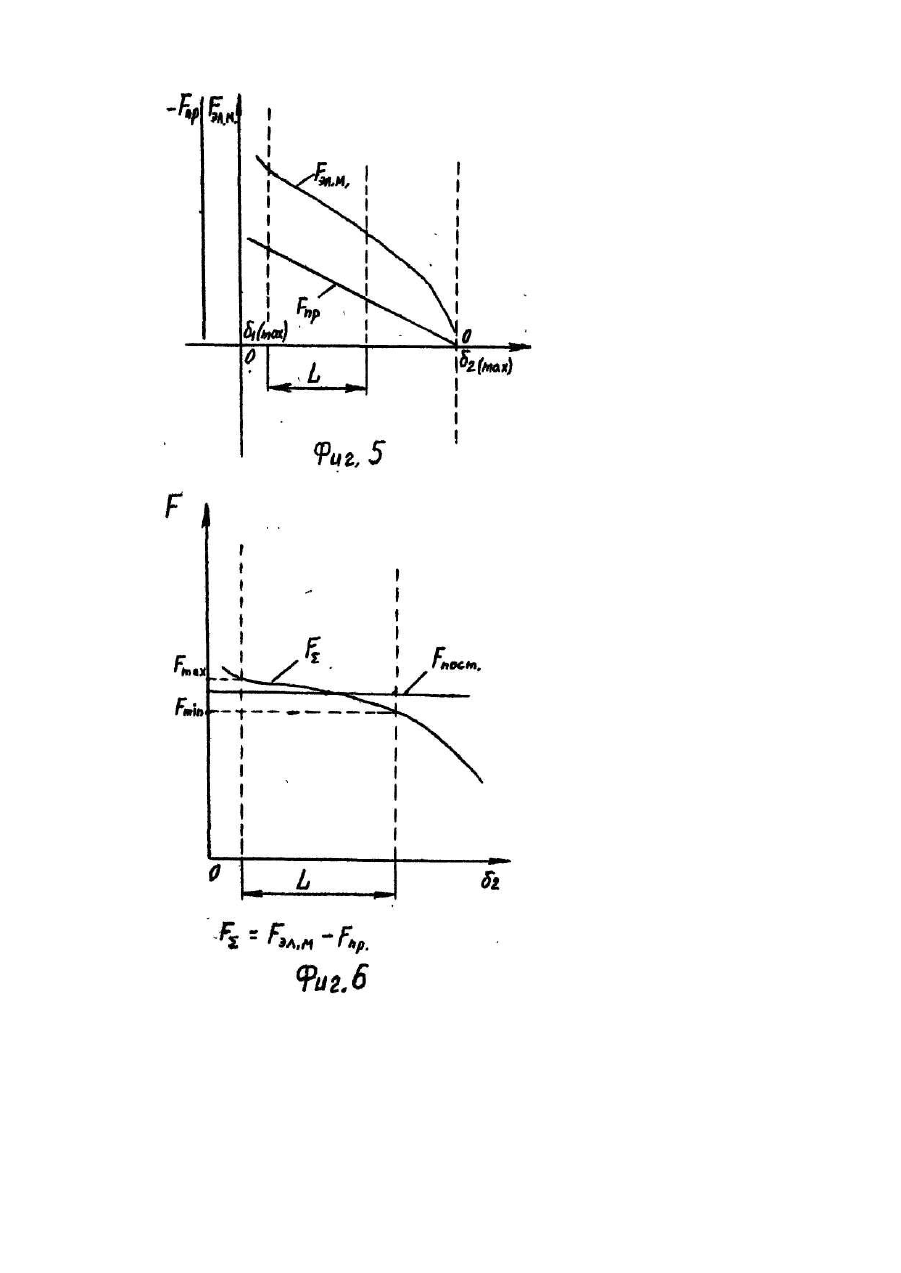
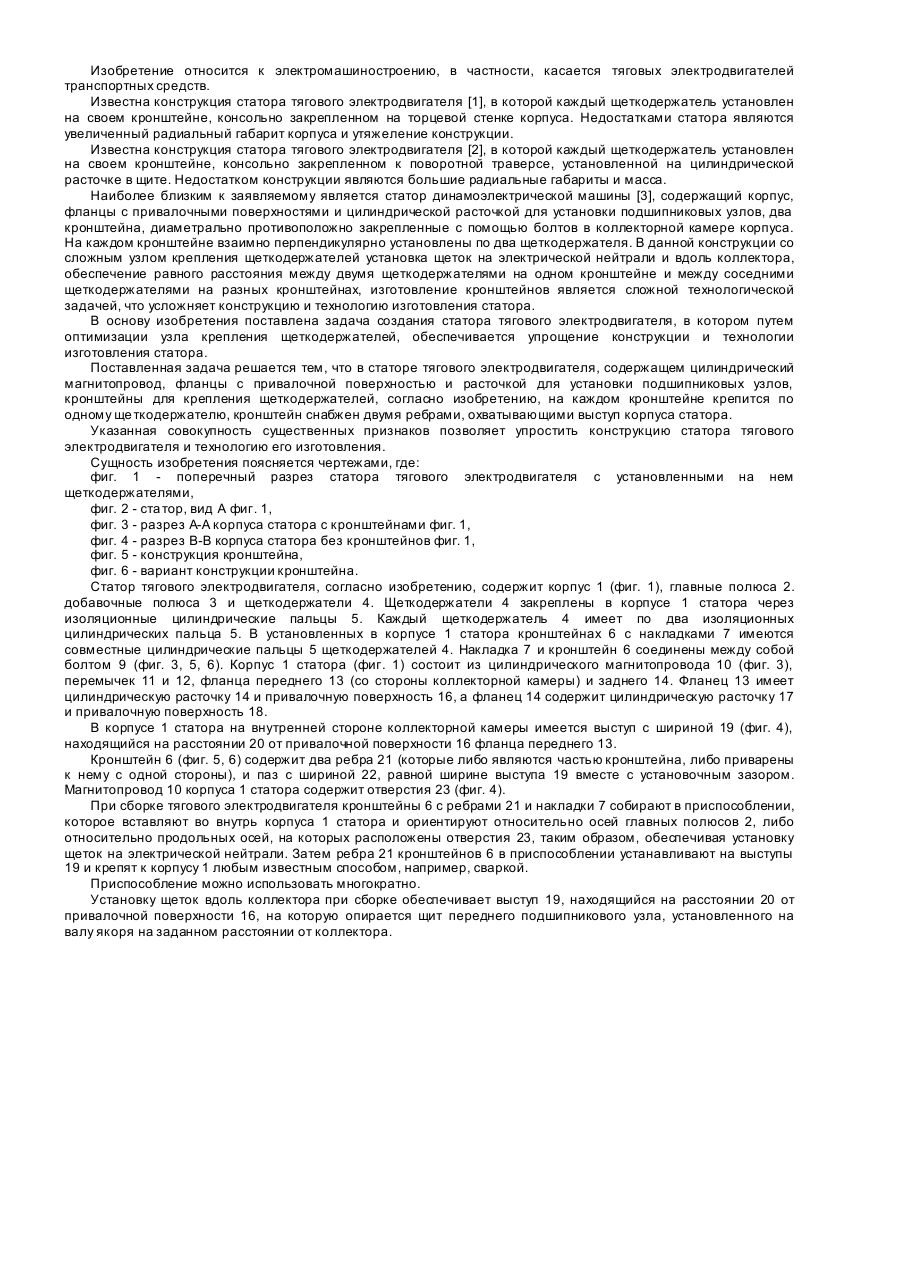
Изобретение относится к области электротехники и может быть использовано в устройства х, требующих постоянства тягового усилия, в частности, в приводах пишущи х устройств графопостроителей для достижения постоянного усилия нажатия пишущего элемента на носитель информации при неровностях и перекосах поверхности носителя информации. Известна поляризованная электромагнитная система, использованная в электромагнитном клапане [1], включающем в себя электромагнит с магнитопроводом и двумя катушками, между которыми установлен постоянный магнит, подпружиненный якорь, имеющий два крайних фиксированных положения. Принцип действия этой системы основан на создании суммарного тягового усилия, воздействующего на якорь, складывающегося из электромагнитного усилия, созданного магнитным потоком от тока в катушках, протекающим через воздушные зазоры между якорем и магнитопроводом, механического усилия пружины и усилия, создаваемого магнитным потоком постоянного магнита, который распределяется пропорционально магнитным сопротивлениям воздушных зазоров. Недостатком данного способа формирования тягового усилия в этой поляризованной системе является отсутствие постоянства суммарного тягового усилия на рабочем участке ходя якоря, т.е. присуща нелинейная зависимость суммарного тягового усилия от положения якоря. При максимальном воздушном зазоре между нижним торцевым концом якоря и магнитопроводом возникающее суммарное тяговое усилие мало и наоборот, оно резко возрастает при уменьшении указанного воздушного зазора в процессе перемещения якоря. Частично данный недостаток был устранен скосом нижней торцевой поверхности якоря и соответствующей поверхности магнитопровода в способе формирования тягового усилия в поляризованной электромагнитной системе [2], в которой втяжной якорь находится под суммарным воздействием потока постоянного магнита и возвратной пружины, причем величину угла скоса конического стопа втяжного якоря определяют в зависимости от заданного тягового усилия. В данном случае улучшается плавность изменения суммарного тягового усилия в процессе перемещения якоря, однако не устраняется нелинейность тяговой характеристики, т.е. не достигается постоянства тягового усилия. Отсутствие постоянства тягового усилия приводит к некачественному выполнению технологической операции, выполняемой рабочим инструментом, жестко закрепленным к подвижному якорю, в частности, пишущего элемента, усилие нажатия которого на носитель информации определяет ширину вычерчиваемой линии и четкость по всей поверхности листа при его перекосе и неровности поверхности. Отсутствие способа определения величины угла скоса приводит к тому, что его пытаются определить методом подборки. Такой подход является продолжительным и не точным. Обладает достаточно большим разбросом относительно требуемой зависимости тягового усилия от положения ходя якоря. В основу изобретения поставлена задача усовершенствования способа формирования тягового усилия в поляризованной электромагнитной системе, в котором путем определения действительной величины угла скоса втяжного якоря в заданных точках его перемещения из исходного положения в рабочее обеспечивается постоянство суммарного усилия на всем рабочем участке перемещения, благодаря чему исключается влияние внешних воздействий на формирование тягового усилия. Поставленная задача решается тем, что в способе формирования тягового усилия в поляризованной электромагнитной системе с втяжным якорем с коническим 'стоном, в которой втяжной якорь находится под суммарным воздействием потока постоянного магнита и возвратной пружины, причем величину угла скоса конического стопа втяжного якоря определяют в зависимости от заданного тягового усилия, согласно изобретению при постоянном тяговом усилии, втяжной якорь перемещают из исходного положения в рабочее и определяют предварительную величину угла скоса в каждой из заранее заданных точек перемещения, при этом указанную величину предварительного угла скоса определяют по формуле где gn - величина предварительного угла скоса якоря; а, b, с - коэффициенты биквадратного уравнения d1 d2- величины смещения концов якоря относительно концов магнитопровода; Кd - коэффициент рассеяния магнитной цепи для потока катушек; I - ток, протекающий в последовательно соединенных катушках; W - суммарное число витков обоих катушек; So - площадь поперечного сечения верхнего воздушного зазора, образованного прямымиторцевыми поверхностями якоря и магнитопровода; μ0 - магнитная постоянная; Фо - магнитный поток постоянного магнита; К - коэффициент жесткости упругого элемента; Fconst - постоянное заданное тяговое усилие. и находят величину действительного угла скоса втяжного якоря по среднеарифметическому значению суммы величин предварительных углов скоса. Предложенное техническое решение поясняется чертежом, где на фиг. 1 изображен общий вид поляризованной электромагнитной системы, на фиг. 2 - прохождение магнитных потоков в системе и силы, действующие на подвижную часть; на фиг. 3 -расположение якоря в системе; на фиг. 4 -схема замещения магнитной цепи поляризованной электромагнитной системы; на фиг. 5 - графическое определение суммарного тягового усилия системы в зависимости от величины смещения углового скоса якоря от соответствующего конца магнитопровода; на фиг. 6 - зависимость суммарного тягового усилия системы от величины смещения якоря в рабочем диапазоне перемещения. Поляризованная магнитная система поясняется конструкцией на фиг. 1, содержащей корпус 1, на котором закреплены неподвижно магнитопровод 2 с катушками 3, между которым установлен постоянный магнит 4. Подвижный якорь 5 размещен между концами б и 7 магнитопровода 2. Один конец якоря 5 выполнен с угловым скосом 8, как и соответствующий ему конец 7 магнитопровода 2. Якорь жестко прикреплен к подвижному элементу 9 (на котором может закрепляться рабочий орган, в частности пишущий стержень), который через упругие элементы 10 (пластичная пружина) крепится к корпусу 1. Воздушные зазоры между якорем и магнитопроводом и величины смещения концов якоря от концов магнитопровода указаны на фиг. 3 через dВ, dΗ , d1, d2, соответственно. Усилия, действующие на якорь, указаны на фиг. 2 через Få, Fnp , FT, Fэл.м , а магнитные потоки, создаваемые током, протекающим в катушках, и постоянным магнитом, указаны на фиг. 2 через Фобм , Фо, Φ1, Ф2 . Магнитные сопротивления постоянного магнита, верхнего и нижнего воздушных зазоров, а также м.д.с. постоянного магнита и обеих катушек указаны на фиг. 4 через RM, RdB R dH, Fm и Fобм . соотве тственно. Реализация способа происходит следующим образом. Магнитная система должна быть ненасыщена. Учитывая, что между якорем 5 и постоянным магнитом 4 воздушный зазор (5з (на фиг. 3) достаточно мал, то пренебрегаем его магнитным сопротивлением. Учитывая, что массы подвижного элемента 9 (с пишущим стержнем), а также закрепленного на нем якоря 5- малы, то пренебрегаем силой FT = m * g (см, фиг. 2), где g ускорение свободного падения. Верхний воздушный зазор d3 в процессе перемещения якоря 5 всегда равен величине смещения δ1верхнего.конца якоря относительно верхней части 6 магнитопровода 2, в нижний воздушный зазор dН образуется при смещении нижнего конца 8 якоря 5 относительно нижней части 7 магнитопровода 2. Учитывая, что конец якоря 8, как и соответствующий ему конец 7 магнитопровода 2, выполнены со скосом на угол у к горизонтали, то величина воздушного зазора dН определяется произведением величины смещения d2 нижнего конца 8 якоря относительно нижней части 7 магнитопровода 2 на cos g, т.е. dН = d2 cosg, Расстояние d между верхним концом 6 магнитопровода 2 и верхней поверхностью постоянного магнита 4 должно быть больше или равно сумме величин смещений d1 + d2, т.е. d ≥ d1 + d2, а расстояние I между концом 7 магнитопровода 2 и нижней поверхностью постоянного магнита 4 не должно превышать расстояния d, т.е. I < d. Размер боковой поверхности якоря, обращенной к постоянному магниту 4, определяется по формуле hя ≥ hм + d, где hM - размер магнита 4 по вертикали. Плоские пружины 10, с которыми соединен подвижный элемент 9 с якорем 5, подбирают так, чтобы полностью компенсировать усилие притяжением якоря к постоянному магниту 4, что предотвратит прилипание якоря 5 к торцевой поверхности постоянного магнита 4. Общий вид выражения для сил, под действием которых осуществляется перемещение якоря, определяется по формуле где Få - суммарное тяговое усилие, воздействующее на якорь; Fэл.м - тяговое усилие, созданное магнитными потоками катушек 3 и постоянного магнита 4; - усилие сопротивления упруги х элементов 10 (плоских пружин), усилию Fэл м , где К коэффициент жесткости. Тяговое усилие Fэп.м. определяют как разность тяговых усилий в нижнем dH и верхнем dB воздушны х зазорах где FB, F h - тяговые усилия в верхнем dH и нижнем дв воздушных зазорах, соотве тственно. Определим составляющие тягового уси лия в выражении (2) FB и FH. В соответствии со схемой прохождения магнитных потоков (см. фиг. 2) и схемой замещения проведенной на фиг. 4 при обесточенных катушках, т.е. I = 0, а следовательно, и Fобм = 0, так как Fобм. =I * W, где I - ток, протекающий в последовательно соединенных катушках 3 фиг. 1, W - суммарное число витков обоих катушек 3 фиг. 1. и соотношений где - поток в зазоре dв находим поток постоянного магнита от постоянного магнита; - поток в зазоре dH о т постоянного магнита. Результирующее значение потоков в воздушны х зазорах dB и dH, создаваемых постоянным магнитом 4 и катушками 3 при движении якоря 5 в направлении рабочего перемещения из верхнего крайнего положения в нижнее: где - магнитный поток, созданный катушками 3; Kd- коэффициент рассеяния магнитной цепи для потока катушек 3; μο - магнитная постоянная; Sd - площадь поперечного сечения верхнего воздушного зазора dв. Тяговые усилия в воздушных зазора dв и dH Из формул (2), (4), (5), (6) и (7) определяет тяговое усилие Fэп м.: Подставив (8) в (1) получим выражение суммарного тягового усилия, воздействующего на якорь: Для перемещения якоря 5 из рабочего положения в исходное верхнее крайнее положение необходимо изменить направление протекания тока в катушках 3, в результате чего усилие FЭл м. изменит знак на противоположный, т.е. теперь направление его действия совпадает с направлением действия совпадает с направлением действия усилия плоских пружин 10, и под действием этих двух усилий якорь переместится в верхнее нерабочее положение. Преобразовав полученное уравнение (9) с неизвестной величиной cosg, находим выражение для определения промежуточных величин угла у скоса якоря 5 для каждой расчетной точки в рабочем диапазоне L перемещения якоря 5 по параметрам магнитной системы (Ф0, d1,d2,I, W, S d, K d) известной характеристике плоских пружин (Fnp. = К · d1 и заданному постоянному тяговому усилию FnocT., которое принимаем равным Få в каждой расчетной точке. Обозначая коэффициенты, стоящие перед неизвестной величиной cosу, cos 2 у, а также свободный член, как приводим полученное биквадратное уравнение (10) к виду: решая которое определяем промежуточные углы у в рабочем диапазоне L перемещения якоря: где 1, 2 - порядковый номер найденного значения угла у; n - номер расчетной точки в рабочем диапазоне L перемещения якоря. Из всех найденных углов у1, п и у2,л отбираются углы, величина которых меньше 90°. Искомый угол скоса одного из концов 8 якоря 5 и соответствующей ему части 7 магнитопровода 2 определяем как среднеарифметическое значение найденных углов скоса y1n или у2n если углы y1 ,n и у2n определены во всех расчетных точках в рабочем диапазоне L перемещения якоря 5. где m - количество расчетных точек на рабочем диапазоне L перемещения якоря 5. Как видно из решения, в качестве искомого угла у скоса якоря 5 может выбрать любой из найденных углов y1 или у2. Однако, если хоть один из углов y1,n или у1. n хоть в одной точке рабочего диапазона L перемещения якоря определить невозможно, то тогда будет существовать только один угол скоса якоря 5 у1 или у2. Пусть например, невозможно определить угол g2,1 Т.е. нет решения выражения (16), то считаем, что среднеарифметическое значение gср1 не определено, и будет найден только один искомый угол g2 скоса якоря 5. Углы g1 и g2 будут иметь оптимальное значение, так как суммарное тяговое усилие в процессе перемещения якоря 5 в рабочем диапазоне L будет принимать величины, наиболее близкие к заданной величине постоянного тягового усилия F nocT. Погрешности отклонения суммарного тягового усилия от заданного постоянного определяются по формулам где Fmi n, Fmax - соответственно, минимальная и максимальная величины суммарного тягового усилия в рабочем диапазоне L перемещения якоря. При отклонении угла скоса γ якоря 5 (принятого равным g1 или g2) от оптимального значения, одна из погрешностей Δ1 или Δ2 будет уменьшаться, а вторая возрастать, что приведет к большему отклонению суммарного тягового усилия от заданного постоянного тягового усилия. Величины Fmax и F mln можно определить, графически построив зависимости усилий Fэл.м и Fnp. от перемещения якоря 5, из которых находят суммарное тяговое усилие Få как Fэл.м - Fnp., и построив зависимость Få от перемещения якоря d2, определяют искомые величины Fmax и F min в пределах рабочего диапазоне L перемещения якоря 5 (фиг. 5, 6). Для более точного определения угла у скоса якоря 5 и соответствующей ему части 7 магнитопровода 2 необходимо учитывать магнитное сопротивление воздушного зазора d3 и силу FT, воздействующую на подвижный элемент 9 с якорем 5.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for formation of traction force in polarized electromagnetic system
Автори англійськоюMukhomor Volodymyr Mykhailovych, Makarov Sergii Olehovych, Misevria Ivan Vasyliovych
Назва патенту російськоюСпособ формирования тягового усилия в поляризованной электромагнитной системе
Автори російськоюМухомор Владимир Михайлович, Макаров Сергей Олегович, Мисевря Иван Васильевич
МПК / Мітки
МПК: F16K 31/02
Мітки: тягового, зусилля, поляризованій, спосіб, формування, системі, електромагнітний
Код посилання
<a href="https://ua.patents.su/7-19092-sposib-formuvannya-tyagovogo-zusillya-u-polyarizovanijj-elektromagnitnijj-sistemi.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування тягового зусилля у поляризованій електромагнітній системі</a>
Статор тягового електродвигуна
Номер патенту: 1956
Опубліковано: 20.12.1994
Автори: Хавін Зосім Теодорович, Райтман Євген Лазаревич, Гавріш Віктор Григорович, Макарєєв Олександр Дмитрович, Грівін Сергій Анатолійович
МПК: H02K 5/14
Мітки: статор, тягового, електродвигуна
Формула / Реферат:
Статор тягового электродвигателя, содержащий цилиндрический магнитопровод, фланцы с привалочной поверхностью и расточкой для установки подшипниковых узлов, кронштейны для крепления щеткодержателей, отличающийся тем, что на каждом кронштейне крепится по одному щеткодержателю, кронштейн снабжен двумя ребрами, охватывающими выступ корпуса статора.
Натяжний пристрій замкненого тягового канату підвісної дороги
Номер патенту: 6676
Опубліковано: 29.12.1994
Автори: Бабенко Олександр Васильович, Єненко Олександр Борисович, Коротков Володимир Леонідович
МПК: B61B 12/00
Мітки: замкненого, тягового, підвісної, канату, пристрій, дороги, натяжний
Формула / Реферат:
(57) Натяжное устройство замкнутого тягового каната подвесной дороги, содержащее установленные на несущей опоре две пары отклоняющих блоков, натяжные грузы с обводными блоками, гидроцилиндры, поршневые полости которых сообщены между собой посредством трубопровода, а также регулируемый дроссель, отличающееся тем, что каждый из натяжных грузов выполнен с упором, расположенным над соответствующим обводным блоком, а каждый из гидроцилиндров...
Пристрій для регулювання напруги тягового генератора транспортного засобу
Номер патенту: 15752
Опубліковано: 30.06.1997
Автори: Бокан Леонід Геннадійович, Аронов Марк Ісакович, Длугаш Ольга Петрівна
МПК: B60L 3/10
Мітки: пристрій, генератора, засобу, напруги, регулювання, тягового, транспортного
Формула / Реферат:
(57) Устройство для регулирования напряжения тягового генератора транспортногосредства, содержащее регулятор тока возбуждения тягового генератора, первый вход которого соединен с выходом блока задания тока возбуждения, а второй - с выходом блока сравнения, к первому входу которого подключен выход датчика напряжения тягового генератора, блок задания интенсивности изменения напряжения, первый вход которого подключен к выходу блока обнаружения...
Лінійний кроковий електродвигун

Номер патенту: 2136
Опубліковано: 26.12.1994
Автори: Ненека Мирослав Федорович, Завгородній Віктор Дмитрович
МПК: H02K 41/03
Мітки: електродвигун, кроковий, лінійний
Формула / Реферат:
Линейный шаговый электродвигатель, содержащий зубчатый ферромагнитный индуктор и якорь, состоящий из двух П-образных сердечников с зубчатыми полюсами, на которых расположены обмотки управления, и постоянного магнита, установленного между сердечниками, отличающийся тем, что, с целью повышения точности позиционирования, один П-образный сердечник расположен в другом с возможностью их взаимного смещения относительно полюсов, при этом...
Індуктивний датчик лінійних переміщень

Номер патенту: 3418
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 5/14
Мітки: датчик, переміщень, індуктивний, лінійних
Формула / Реферат:
Индуктивный датчик линейных перемeщений, содержащий корпус, смонтированные в нем соосные катушки индуктивностей, коаксиально установленный в них якорь, установленный в корпусе с помощью шарнира измерительный рычаг, один конец которого скреплен с якорем, закрепленный на другом конце измерительного рычага щуп и средство крепления на объекте контроля, отличающийся тем, что, с целью упрощения конструкции и повышения удобств при эксплуатации,...
Попередній патент: Харчовий продукт “фітодраже”
Наступний патент: Спосіб одержання біоактивного препарату
Випадковий патент: Спосіб отримання речовини для лікування захворювань щитовидної залози