Сигналізація висхідної лінії зв’язку адаптивного транспортного формату для непов’язаних з даними керуючих сигналів зворотного зв’язку
Формула / Реферат
1. Користувацьке обладнання, яке містить:
декодувальний пристрій, що реагує на керівний сигнал динамічного транспортного формату від базової станції, який вказує на динамічно вибраний транспортний формат, для декодування згаданого командного сигналу, щоб надати декодований сигнал, який вказує на згаданий динамічно вибраний транспортний формат, для використання в непов'язаній з даними керівній сигналізації зворотного зв'язку висхідної лінії зв'язку; і
кодувальний пристрій, що реагує на згаданий декодований сигнал, для кодування інформації зворотного зв'язку відповідно до згаданого динамічно вибраного транспортного формату для передачі на базову станцію з використанням вибраного транспортного формату.
2. Користувацьке обладнання за п. 1, у якому згаданий динамічно вибраний транспортний формат включає в себе динамічно вибраний символьний простір, що передається від згаданої базової станції на згадане користувацьке обладнання.
3. Користувацьке обладнання за п. 1, у якому згадана непов'язана з даними керівна сигналізація зворотного зв'язку висхідної лінії зв'язку включає в себе напівстатичну частину й динамічну частину.
4. Користувацьке обладнання за п. 1, у якому комбінації транспортного формату можуть оптимізуватися окремо для режиму "з одним входом і багатьма виходами" і віртуального режиму "з багатьма входами й багатьма виходами", причому вибраний режим змінюється динамічно відповідно до рішень пристрою планування висхідної лінії зв'язку.
5. Користувацьке обладнання за п. 2, у якому комбінації транспортного формату можуть оптимізуватися окремо для режиму "з одним входом і багатьма виходами" і віртуального режиму "з багатьма входами й багатьма виходами", причому вибраний режим змінюється динамічно відповідно до рішень пристрою планування висхідної лінії зв'язку.
6. Користувацьке обладнання за п. 4, у якому віртуальний режим "з багатьма входами й багатьма виходами" одержує перевагу із блокового розширення, застосовуваного для множинних потоків керування, тоді як у випадку режиму "з одним входом і багатьма виходами" сигналізація оптимізується, коли розширення не застосовується.
7. Базова станція, яка містить:
кодувальний пристрій, що реагує на компонентні сигнали динамічно вибраного транспортного формату й на сигнал даних, для кодування згаданих компонентних сигналів транспортного формату й згаданого сигналу даних, щоб надати керуючий сигнал динамічного транспортного формату для передачі від згаданої базової станції на користувацьке обладнання, причому згаданий керуючий сигнал вказує на динамічно вибраний транспортний формат для непов'язаної з даними сигналізації висхідної лінії зв'язку, використовуваної згаданим користувацьким обладнанням; і
декодувальний пристрій, що реагує на згадану непов'язану з даними сигналізацію висхідної лінії зв'язку, для декодування інформації зворотного зв'язку відповідно до згаданого динамічно вибраного транспортного формату.
8. Базова станція за п. 7, у якій згаданий динамічно вибраний транспортний формат включає в себе динамічно вибраний символьний простір, що передається від згаданої базової станції на згадане користувацьке обладнання.
9. Базова станція за п. 7, у якій згадана непов'язана з даними керівна сигналізація зворотного зв'язку висхідної лінії зв'язку включає в себе напівстатичну частину й динамічну частину.
10. Базова станція за п. 7, у якій комбінації транспортного формату можуть оптимізуватися окремо для режиму "з одним входом і багатьма виходами" і віртуального режиму "з багатьма входами й багатьма виходами", причому вибраний режим змінюється динамічно.
11. Базова станція за п. 7, у якій символьний простір, виділений для інформації зворотного зв'язку, змінюється відповідно до згаданого динамічно вибраного транспортного формату.
12. Система зв'язку, яка містить: базову станцію, що містить:
кодувальний пристрій, що реагує на компонентні сигнали динамічно вибраного транспортного формату й на сигнал даних, для кодування згаданих компонентних сигналів транспортного формату й згаданого сигналу даних, щоб надати об'єднаний керуючий сигнал даних і динамічного транспортного формату для передачі від згаданої базової станції на користувацьке обладнання, причому згаданий керуючий сигнал вказує на динамічно вибраний транспортний формат для непов'язаної з даними сигналізації висхідної лінії зв'язку для використання згаданим користувацьким обладнанням; і
декодувальний пристрій, що реагує на згадану непов'язану з даними керуючу сигналізацію від згаданого користувацького обладнання, для декодування інформації зворотного зв'язку відповідно до згаданого динамічно вибраного транспортного формату; і
користувацьке обладнання, що містить:
декодувальний пристрій, що реагує на згаданий керуючий сигнал динамічного транспортного формату від згаданої базової станції, для декодування згаданого командного сигналу, щоб надати декодований сигнал, що вказує на згаданий динамічно вибраний транспортний формат, для використання в згаданій непов'язаній з даними сигналізації висхідної лінії зв'язку; і
кодувальний пристрій, що реагує на згаданий декодований сигнал, для кодування інформації зворотного зв'язку відповідно до згаданого динамічно вибраного транспортного формату для передачі на базову станцію як згаданої непов'язаної з даними сигналізації висхідної лінії зв'язку з використанням вибраного транспортного формату.
13. Спосіб кодування та декодування, який полягає в тому, що
у відповідь на керуючий сигнал динамічного транспортного формату від базової станції, який вказує на динамічно вибраний транспортний формат, декодують зазначений командний сигнал, щоб надати декодований сигнал, який вказує на згаданий динамічно вибраний транспортний формат, для використання в непов'язаній з даними керуючої сигналізації зворотного зв'язку висхідної лінії зв'язку; та
у відповідь на декодований сигнал кодують інформацію зворотного зв'язку відповідно до згаданого динамічно вибраного транспортного формату для передачі на базову станцію з використанням вибраного транспортного формату.
14. Спосіб за п. 13, в якому згаданий динамічно вибраний транспортний формат включає в себе динамічно вибраний символьний простір, що передається від згаданої базової станції на згадане користувацьке обладнання.
15. Спосіб за п. 13, в якому згадана непов'язана з даними керуюча сигналізація зворотного зв'язку висхідної лінії зв'язку включає в себе напівстатичну частину й динамічну частину.
16. Спосіб за п. 13, в якому комбінації транспортного формату можуть бути оптимізованими окремо для режиму "з одним входом і багатьма виходами" і віртуального режиму "з багатьма входами й багатьма виходами", причому вибраний режим змінюється динамічно відповідно до рішень пристрою планування висхідної лінії зв'язку.
17. Спосіб за п. 14, в якому комбінації транспортного формату можуть бути оптимізованими окремо для режиму "з одним входом і багатьма виходами" і віртуального режиму "з багатьма входами й багатьма виходами", причому вибраний режим змінюється динамічно відповідно до рішень пристрою планування висхідної лінії зв'язку.
18. Спосіб за п. 16, в якому віртуальний режим "з багатьма входами й багатьма виходами" одержує перевагу із блокового розширення, застосовуваного для множинних потоків керування, тоді як у випадку режиму "з одним входом і багатьма виходами" сигналізація оптимізується, коли розширення не застосовується.
19. Спосіб кодування та декодування, який полягає в тому, що
у відповідь на компонентні сигнали динамічно вибраного транспортного формату й на сигнал даних кодують згадані компонентні сигнали транспортного формату й згаданого сигналу даних, щоб надати керуючий сигнал динамічного транспортного формату для передачі від згаданої базової станції на користувацьке обладнання, причому згаданий керуючий сигнал вказує на динамічно вибраний транспортний формат для непов'язаної з даними сигналізації висхідної лінії зв'язку, використовуваної згаданим користувацьким обладнанням; і
у відповідь на згадану непов'язану з даними сигналізацію висхідної лінії зв'язку декодують інформацію зворотного зв'язку відповідно до згаданого динамічно вибраного транспортного формату.
20. Спосіб за п. 19, в якому згаданий динамічно вибраний транспортний формат включає в себе динамічно вибраний символьний простір, що передається від згаданої базової станції на згадане користувацьке обладнання.
21. Спосіб за п. 19, в якому згадана непов'язана з даними керівна сигналізація зворотного зв'язку висхідної лінії зв'язку включає в себе напівстатичну частину й динамічну частину.
22. Спосіб за п. 19, в якому комбінації транспортного формату може бути оптимізовано окремо для режиму "з одним входом і багатьма виходами" і віртуального режиму "з багатьма входами й багатьма виходами", причому вибраний режим змінюється динамічно.
23. Спосіб за п. 19, в якому символьний простір, виділений для інформації
зворотного зв'язку, змінюється відповідно до згаданого динамічно вибраного транспортного формату.
24. Машинозчитуваний носій, що містить програмний код, здатний здійснювати спосіб за п. 13.
25. Машинозчитуваний носій, що містить програмний код, здатний здійснювати спосіб за п. 19.
Текст
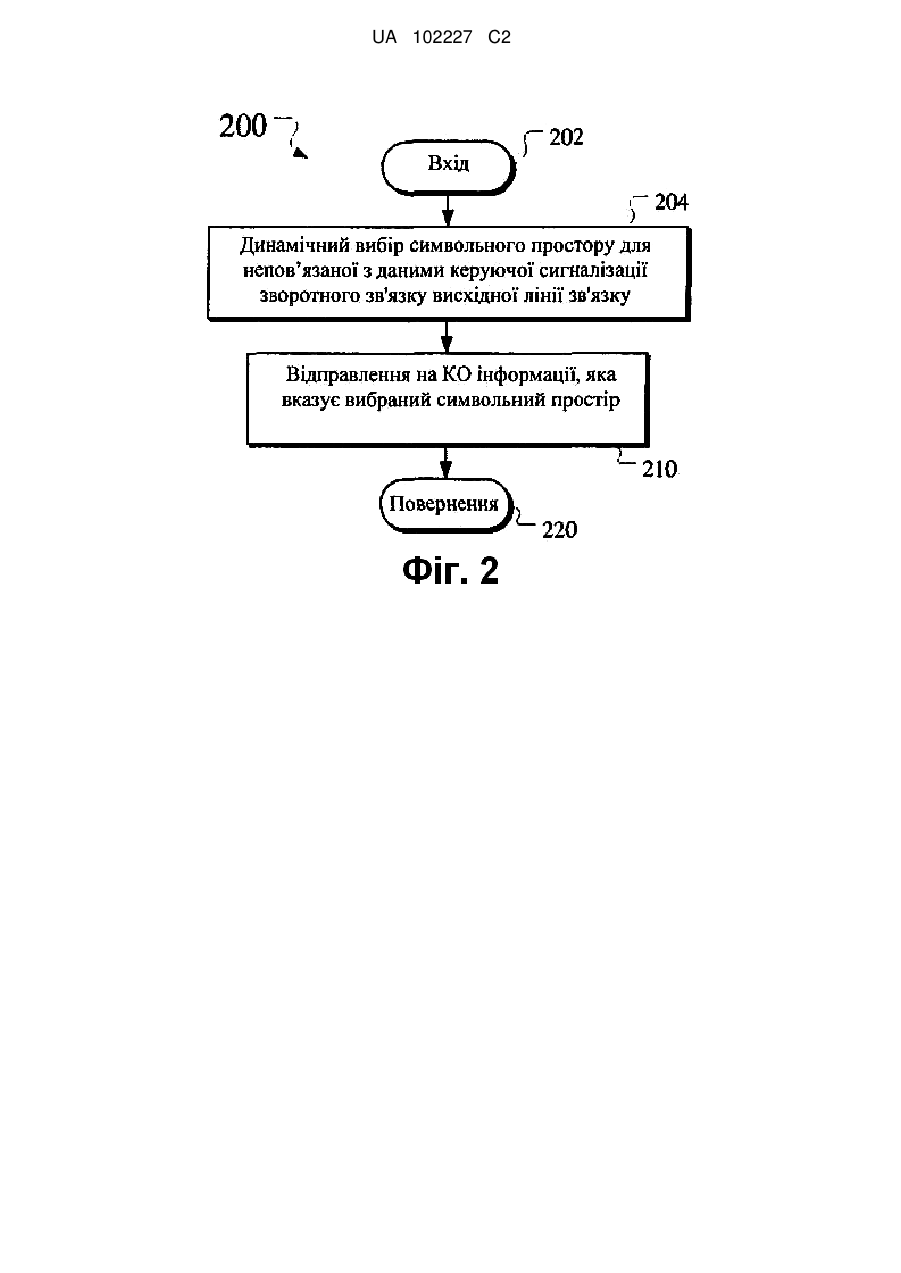
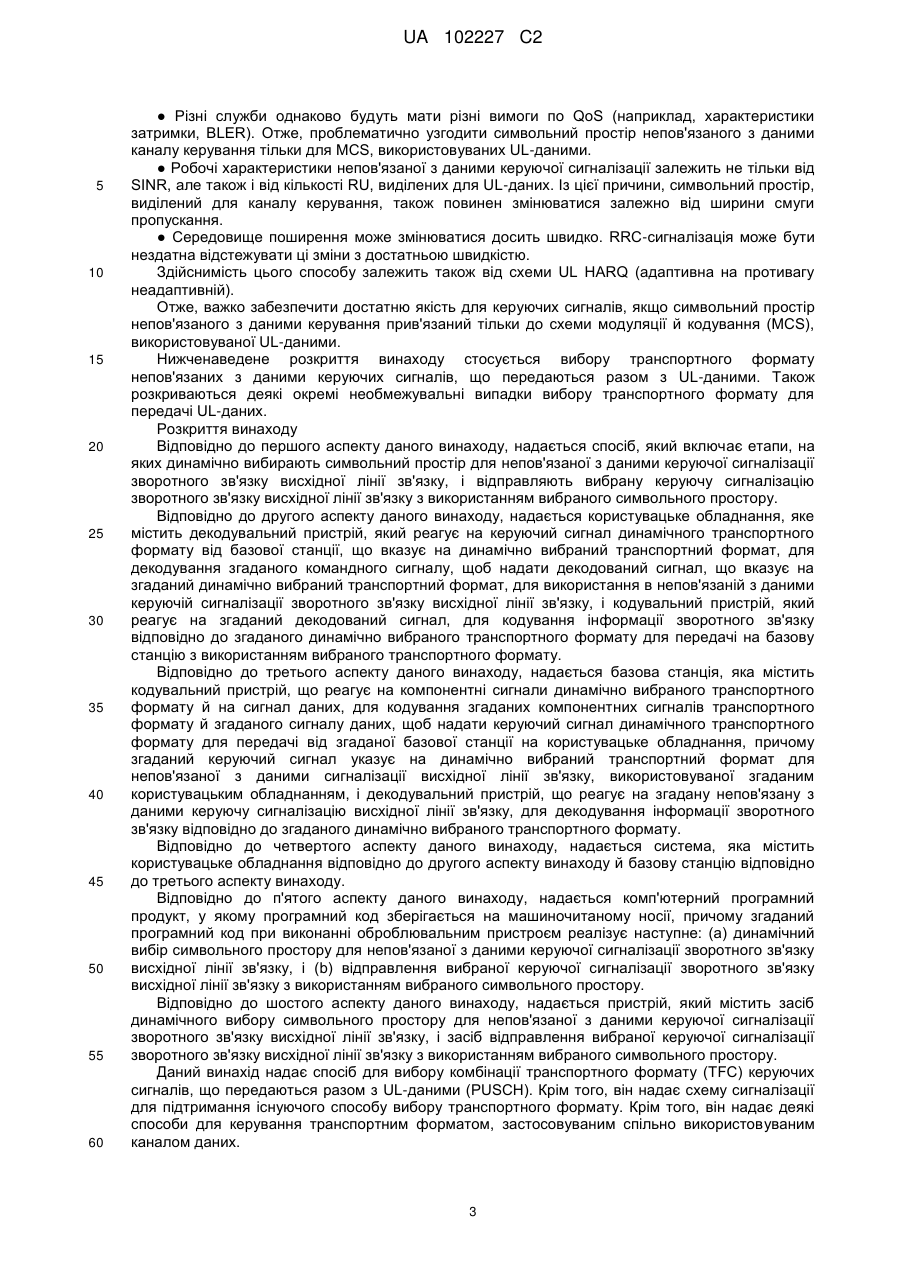
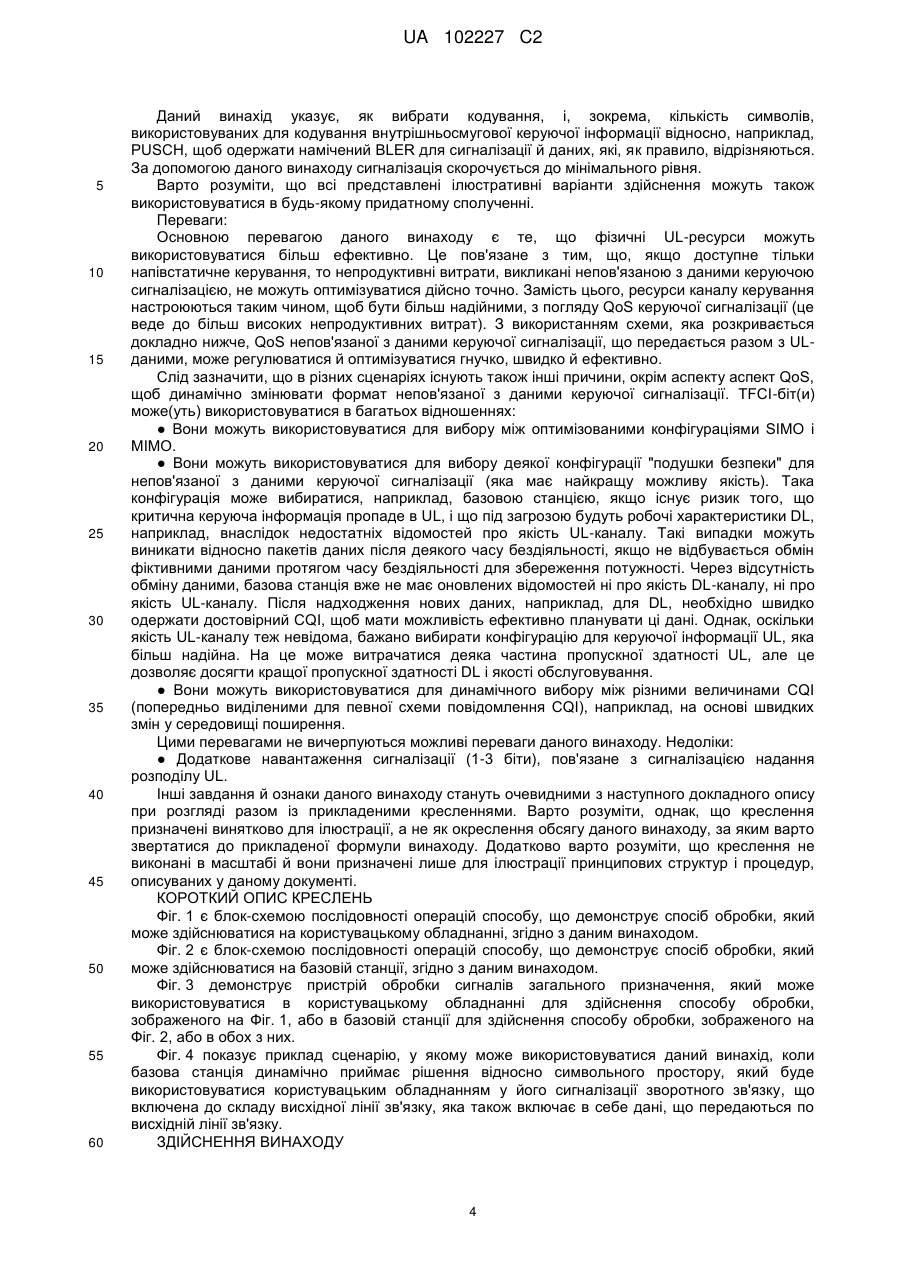
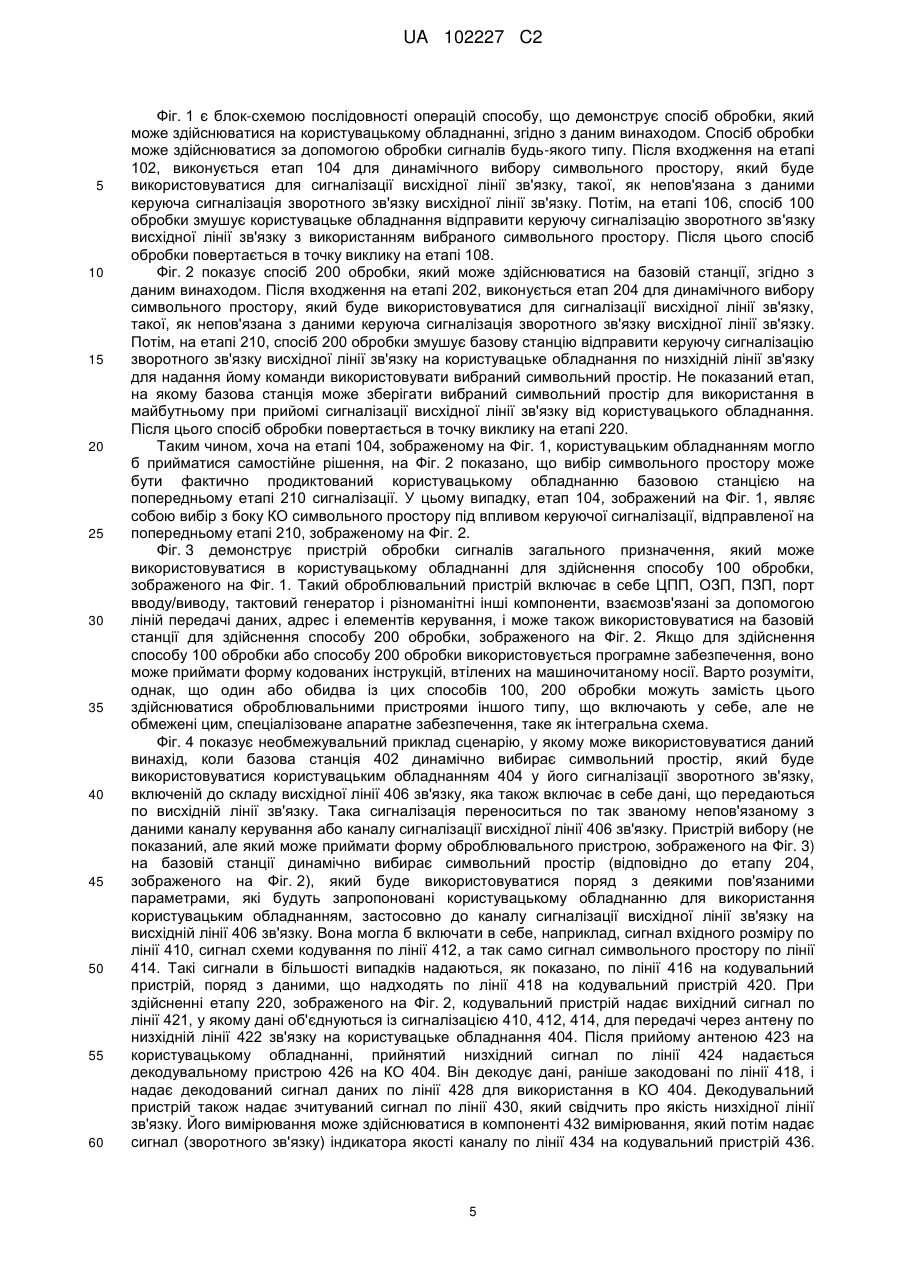
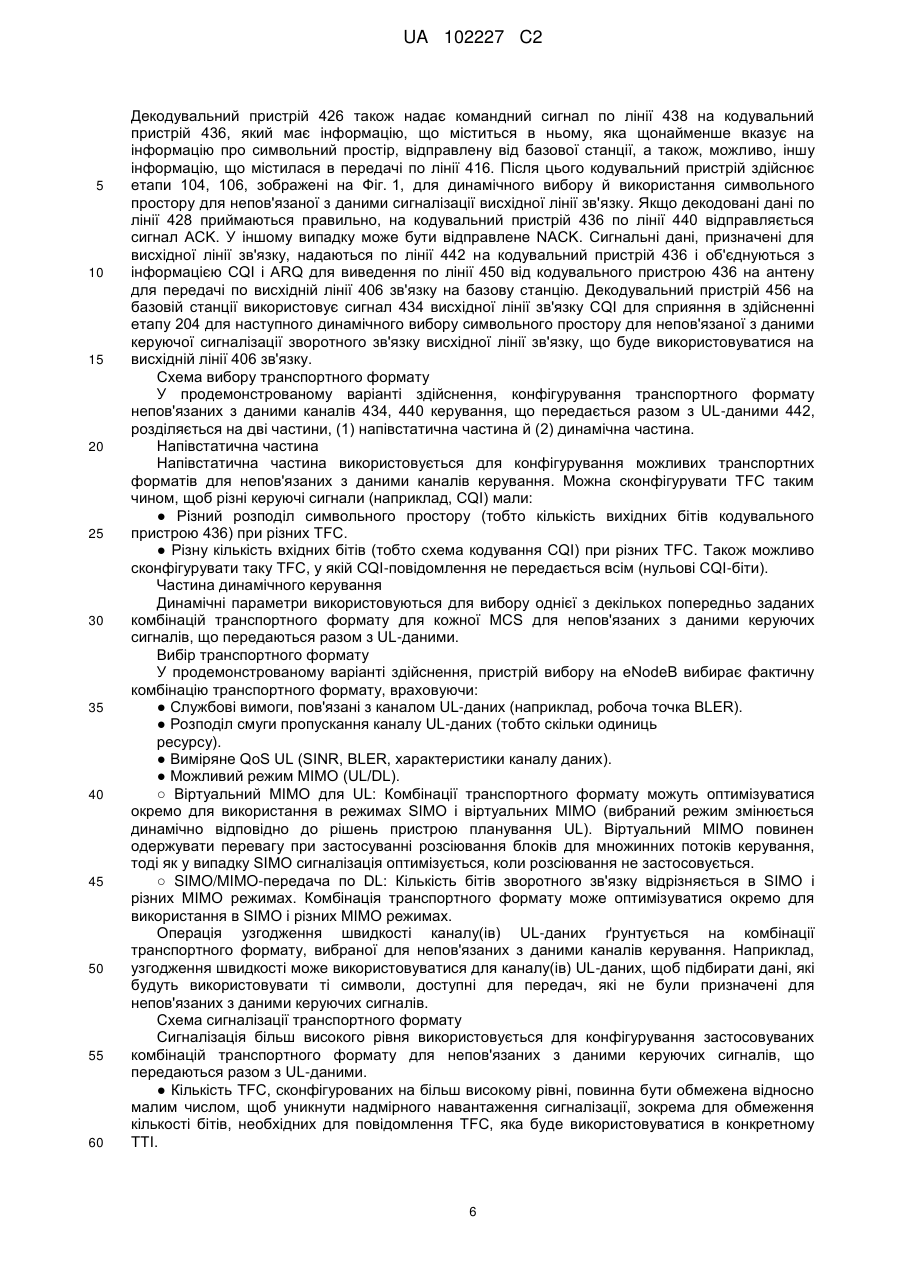
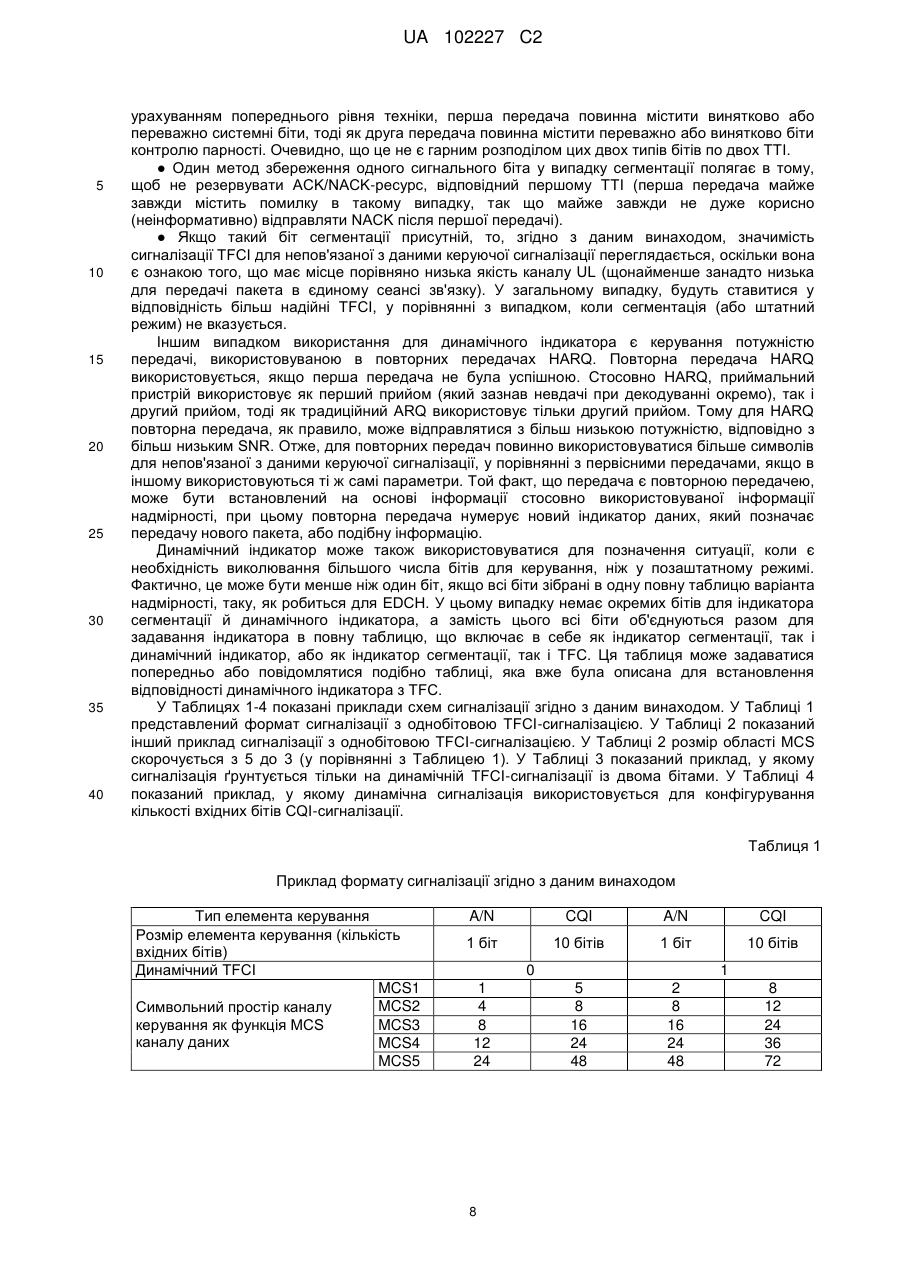
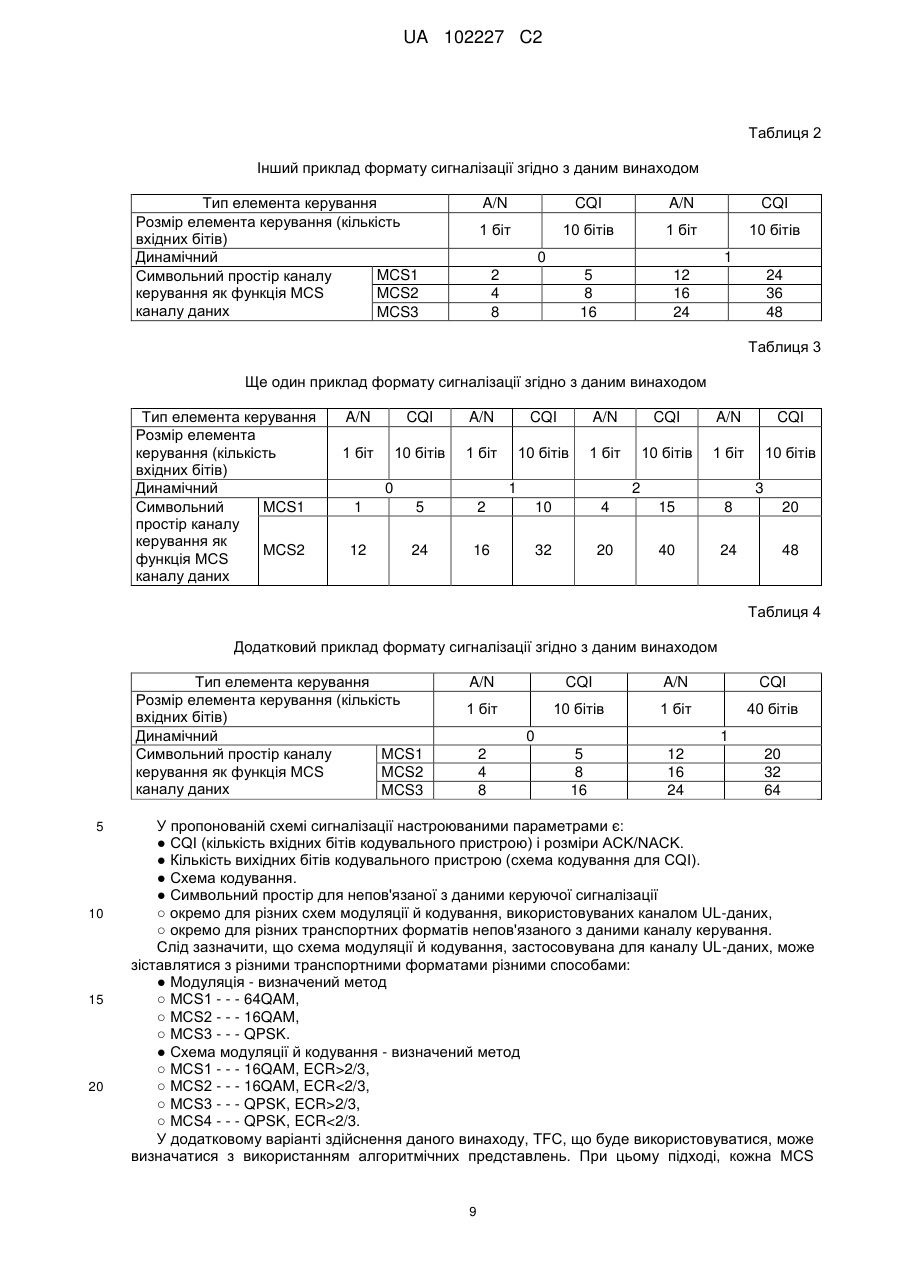
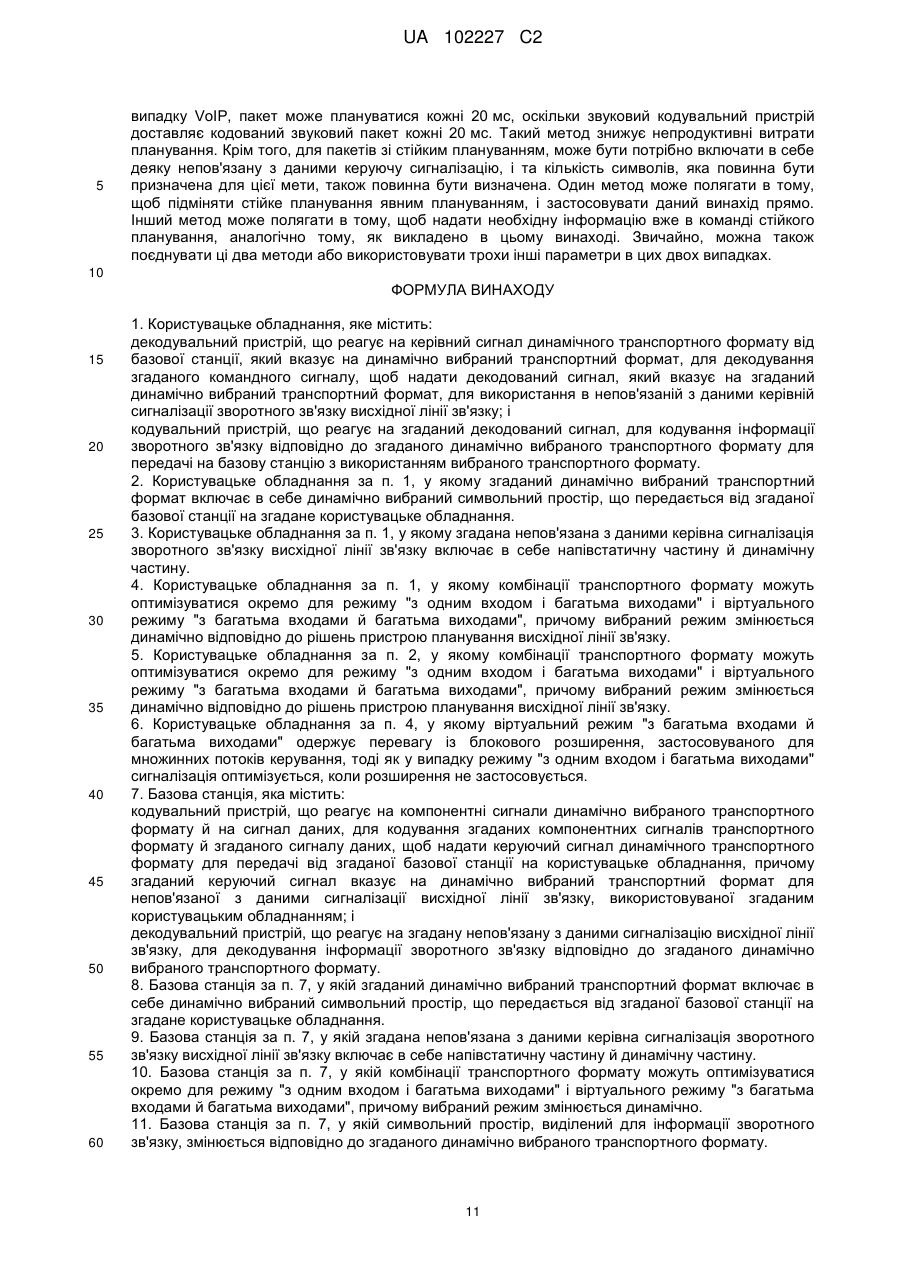
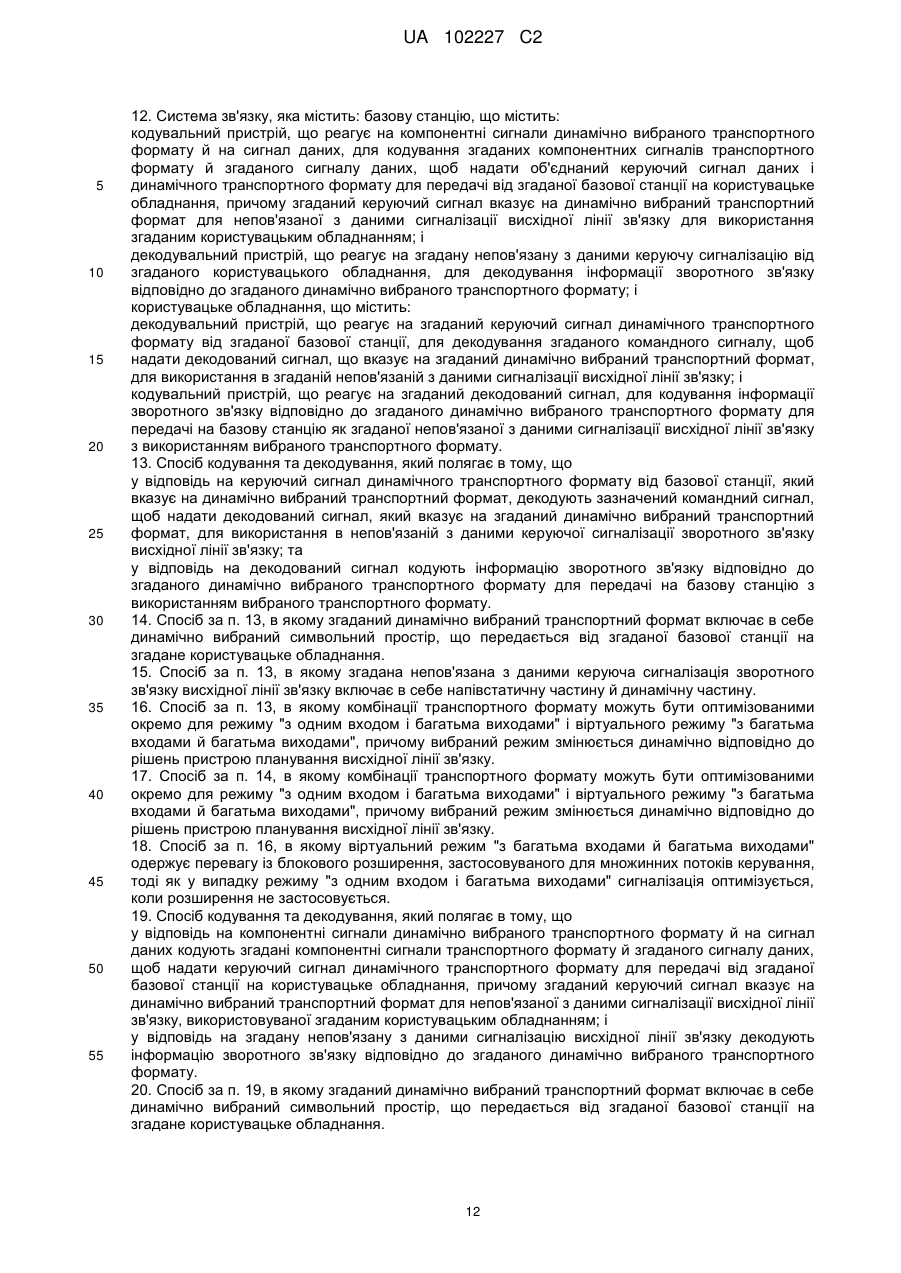
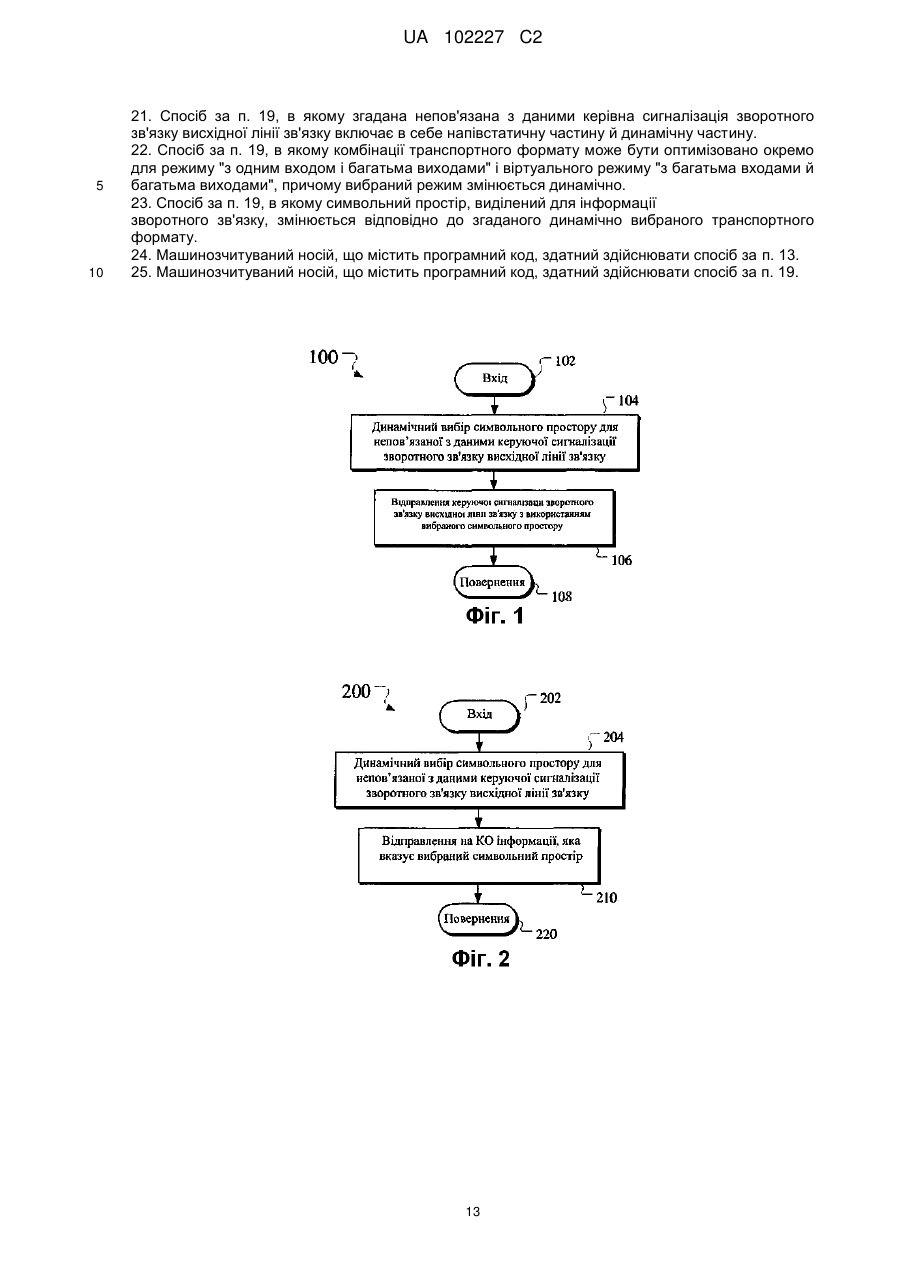
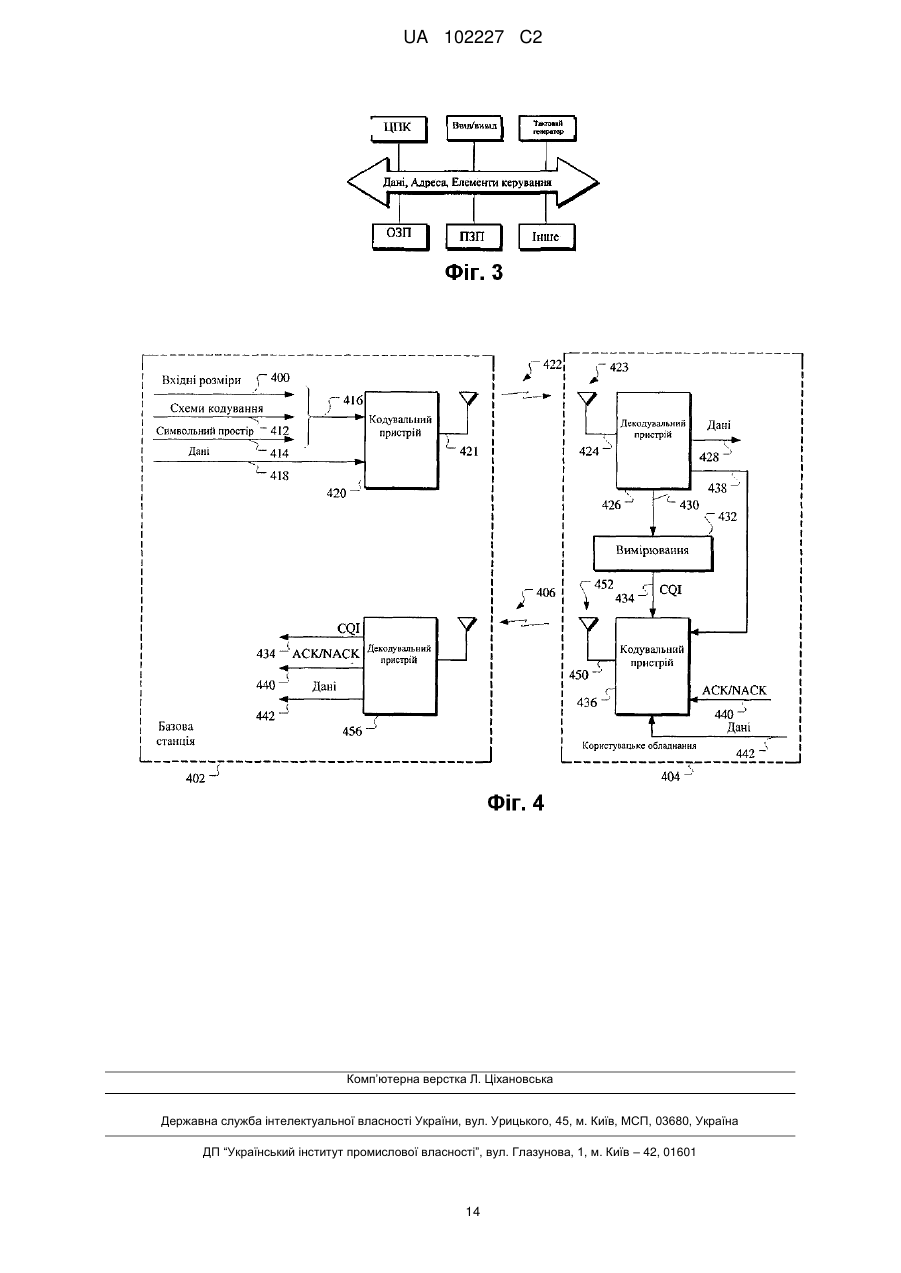
Реферат: Сигналізація висхідної лінії зв'язку адаптивного транспортного формату для непов'язаних з даними керуючих сигналів зворотного зв'язку. Один або більше динамічно вибраних бітів сигналізації додаються в низхідну лінію зв'язку від базової станції на користувацьке обладнання (КО), щоб КО могло використовувати адаптивний "символьний простір" для сигналізації зворотного зв'язку висхідної лінії зв'язку (CQI/HARQ) і дізнаватися з додатково доданих бітів низхідної сигналізації й MCS, паралельно повідомлюваної в цей момент, наскільки великий символьний простір використовувати в даний час для зворотного зв'язку висхідної лінії зв'язку. UA 102227 C2 (12) UA 102227 C2 UA 102227 C2 5 10 15 20 25 30 35 40 45 50 55 Опис Рівень техніки 1. Галузь техніки, до якої належить винахід Даний винахід стосується вдосконалення сигналізації зворотного зв'язку висхідної лінії зв'язку. 2. Рівень техніки Скорочення 3GPP Third generation partnership program - Програма партнерства в області технологій 3-го покоління. A/N ACK/NACK. ACK Acknowledgement - Підтвердження прийому. BER Bit Error Ratio - Коефіцієнт помилок по бітах. BLER Block Error Ratio - Коефіцієнт помилок по блоках. BPSK Binary Phase Shift Keying - Двійкова фазова маніпуляція. CM Cubic Metric - Кубічна метрика. DL Downlink - Низхідна лінія зв'язку. CQI Channel Quality Indicator - Індикатор якості каналу. CRC Cyclic Redundancy Check - Перевірка за допомогою циклічного надлишкового коду. ECR Effective Coding Rate - Ефективна швидкість кодування. EDCH Enhanced Dedicated Channel - Розширений виділений канал. ENSR Estimated Signal to Noise Ratio - Очікуване відношення сигнал/шум. FB Feedback - Зворотний зв'язок. HARQ Hybrid Automatic Repeat Request - Гібридний автоматичний запит на повторну передачу. LTE Long Term Evolution - Довгостроковий розвиток. MCS Modulation and Coding Scheme - Схема модуляції й кодування. МІМО Multiple-Input Multiple-Output - з багатьма входами й багатьма виходами. NACK Negative ACK - Відсутність підтвердження прийому. PAPR Peak to Average Power Ratio - Відношення пікової потужності до середньої потужності. PAR Peak-to-average ratio - Відношення пікового значення до середнього. PUSCH Physical Uplink Shared Channel - Спільно використовуваний канал висхідної лінії зв'язку на фізичному рівні. QAM Quadrature Amplitude Modulation - Квадратурна амплітудна модуляція. QoS Quality of Service - Якість обслуговування. QPSK Quadrature Phase-Shift Keying - Квадратурна фазова маніпуляція. RRC Radio Resource Control - Керування радіоресурсами. RU Resource Unit - Одиниця ресурсу. SDMA Space Division Multiple Access - Множинний доступ із просторовим розділенням. SIMO Single-Input Multiple-Output - з одним входом і багатьма виходами. SINR Signal-to-Interference and Noise Ratio - Відношення сигналу до перешкоди й шуму. SNR Signal-to-Noise Ratio - Відношення сигнал/шум. TDM Time Division Multiplexing - Ущільнення з часовим розділенням. TFCI Transport Format Combination Indicator - Індикатор комбінації транспортного формату. TFC Transport Format Combination - Комбінація транспортного формату. ТТІ Transmission Time Interval - Часовий інтервал передачі. UL Uplink - Висхідна лінія зв'язку. UTRAN Universal Terrestrial Radio Access Network - Універсальна мережа наземного радіодоступу. VoIP Voice over Internet Protocol - Передача голосу по IP-протоколу (протокол маршрутизації в середовищі Інтернет). Даний винахід виник в умовах подій, що відбуваються в процесі розвитку розділу UL технології довгострокового розвитку (LTE) UTRAN, часто згадуваної як 3.9G, але не обмежується цими умовами. Для UMTS (Універсальна система мобільного зв'язку) мультикоди використовуються й для каналу керування, й для каналу даних, але подібне недоступне в LTE через поганий PAPR. Сигналізація повинна передаватися як внутрішньосмугова сигналізація при передачі даних. Конкретніше, даний винахід виник у процесі розгляду розподілу ресурсів для непов'язаних з даними керуючих сигналів, що передаються разом з UL-даними по PUSCH (Спільно використовуваний канал висхідної лінії зв'язку на фізичному рівні). Ці керуючі сигнали 1 UA 102227 C2 5 10 15 20 25 30 35 40 45 50 55 включають в себе ACK/NACK, обумовлені DL-передачею, і повідомлення CQI, яке може бути або періодичним, або запланованим. У документі RANl#46bis встановлюється, що непов'язана з даними керуюча сигналізація висхідної лінії зв'язку повинна ущільнюватися з UL-даними з використанням ущільнення з часовим розділенням (TDM). Деталізовані дії поки не обговорювалися в 3GPP. Як було зазначено вище, хоча даний винахід не обмежується конкретною умовою, у якій він виник, він випливає з розгляду основної проблеми, яка стосується того, як розділити доступні фізичні ресурси (тобто символьний простір і потужність передачі) між каналом непов'язаного з даними керування й каналом даних у системі LTE UL. Інформація про розділення символьного простору повинна бути попередньо відома на обох сторонах радіолінії, щоб правильно виконувати операції узгодження/неузгодження швидкості й кодування/декодування для різних каналів. Хоча це й не обмежується таким сценарієм, зазначимо, що в системі LTE UL, eNodeB (базова станція) повинна відповідати за розподіл ресурсу між частинами керування й даних і за повідомлення цієї інформації на КО (Користувацьке Обладнання). Це обумовлюється, головним чином, наступним: ● Пов'язана з даними керуюча сигналізація не підтримується в LTE UL. Тому КО не може повідомити указання транспортного формату на eNode В. ● Сліпе виявлення не представляється можливим в UL, не тільки з погляду складності приймального пристрою, але також і беручи до уваги той факт, що CRC може бути недоступна, тому немає зручного критерію, на якому основувати рішення, який із множинних можливих форматів у дійсності передається. Друга проблема полягає в тому, як оптимізувати робочі характеристики непов'язаної з даними керуючої сигналізації. Слід зазначити, що регулювання потужності буде встановлювати цільове значення SINR для PUSCH відповідно до каналу даних. Отже, канал керування повинен адаптуватися до робочої точки SINR, установленого для даних. Керуючі сигнали звичайно мають набагато більш тверді вимоги по затримці. Крім того, керуюча сигналізація не одержує переваги ні від швидкої адаптації зв'язку, ні від HARQ. Отже, кодування для непов'язаної з даними керуючої сигналізації повинно здійснюватися із декілька більшим запасом. Третя проблема стосується різних вимог до робочих характеристик сигналів UL-даних і керуючих сигналів. ● BER ACK/NACK повинен становити близько 0,1 % (без HARQ). ● BLER CQI звичайно повинен бути менше 10 % (без HARQ). ● BLER каналу(ів) UL-даних звичайно коливається між 10 % і 30 % (залежно від робочої точки HARQ). Один метод регулювання доступних ресурсів між частинами керування й даних полягає в тому, щоб застосовувати до них різні величини відхилення по потужності. Існують два основних недоліки відносно цього способу відхилення по потужності: ● Проблема PAR: В [R1-072224] показано, що PAR і CM збільшуються, коли більш висока потужність конфігурується для керування, а не для даних. [R1-072224] рекомендує так обмежувати потужність для керування, щоб не перевищувати потужність для даних. Крім того, неможливо збільшити потужність передачі керуючої сигналізації, коли КО здійснює передачу з повною потужністю (тобто розташовується на границі стільника). Тому збільшення потужності є неефективним для забезпечення належної якості в деяких випадках на практиці. ● Також слід зазначити, що з погляду використання ресурсу, зниження потужності не дуже економічно доцільне, оскільки всі доступні ресурси потужності вже не будуть використовуватися. Це рівноцінно втратам потужності. R1-071000 представляє іншу методику попереднього рівня техніки, у якій символьний простір непов'язаних з даними каналів керування прив'язується до модуляції даних, використовуваної каналом UL-даних. Це є простим наслідком того факту, що кількість бітів, яка доставляється із символом, залежить від модуляції даних: QPSK, 16QAM і 64QAM переносять 2, 4 і 6 бітів, відповідно, отже, кількість символів, необхідних для перенесення заданої кількості бітів у результаті кодування непов'язаної з даними керуючої сигналізації, залежить від використовуваної модуляції. Застосовуваний символьний простір, що відповідає різним модуляціям даних, повідомляється на КО за допомогою сигналізації більш високого рівня (RRCсигналізації). Проблема, пов'язана із цією методикою, полягає в тому, що вона не в змозі гарантувати QoS, непов'язану з даними керуючої сигналізації. Слід зазначити, що цільове значення BLER каналу UL-даних може значно змінюватися залежно від багатьох результатів і параметрів: 2 UA 102227 C2 5 10 15 20 25 30 35 40 45 50 55 60 ● Різні служби однаково будуть мати різні вимоги по QoS (наприклад, характеристики затримки, BLER). Отже, проблематично узгодити символьний простір непов'язаного з даними каналу керування тільки для MCS, використовуваних UL-даними. ● Робочі характеристики непов'язаної з даними керуючої сигналізації залежить не тільки від SINR, але також і від кількості RU, виділених для UL-даних. Із цієї причини, символьний простір, виділений для каналу керування, також повинен змінюватися залежно від ширини смуги пропускання. ● Середовище поширення може змінюватися досить швидко. RRC-сигналізація може бути нездатна відстежувати ці зміни з достатньою швидкістю. Здійснимість цього способу залежить також від схеми UL HARQ (адаптивна на противагу неадаптивній). Отже, важко забезпечити достатню якість для керуючих сигналів, якщо символьний простір непов'язаного з даними керування прив'язаний тільки до схеми модуляції й кодування (MCS), використовуваної UL-даними. Нижченаведене розкриття винаходу стосується вибору транспортного формату непов'язаних з даними керуючих сигналів, що передаються разом з UL-даними. Також розкриваються деякі окремі необмежувальні випадки вибору транспортного формату для передачі UL-даних. Розкриття винаходу Відповідно до першого аспекту даного винаходу, надається спосіб, який включає етапи, на яких динамічно вибирають символьний простір для непов'язаної з даними керуючої сигналізації зворотного зв'язку висхідної лінії зв'язку, і відправляють вибрану керуючу сигналізацію зворотного зв'язку висхідної лінії зв'язку з використанням вибраного символьного простору. Відповідно до другого аспекту даного винаходу, надається користувацьке обладнання, яке містить декодувальний пристрій, який реагує на керуючий сигнал динамічного транспортного формату від базової станції, що вказує на динамічно вибраний транспортний формат, для декодування згаданого командного сигналу, щоб надати декодований сигнал, що вказує на згаданий динамічно вибраний транспортний формат, для використання в непов'язаній з даними керуючій сигналізації зворотного зв'язку висхідної лінії зв'язку, і кодувальний пристрій, який реагує на згаданий декодований сигнал, для кодування інформації зворотного зв'язку відповідно до згаданого динамічно вибраного транспортного формату для передачі на базову станцію з використанням вибраного транспортного формату. Відповідно до третього аспекту даного винаходу, надається базова станція, яка містить кодувальний пристрій, що реагує на компонентні сигнали динамічно вибраного транспортного формату й на сигнал даних, для кодування згаданих компонентних сигналів транспортного формату й згаданого сигналу даних, щоб надати керуючий сигнал динамічного транспортного формату для передачі від згаданої базової станції на користувацьке обладнання, причому згаданий керуючий сигнал указує на динамічно вибраний транспортний формат для непов'язаної з даними сигналізації висхідної лінії зв'язку, використовуваної згаданим користувацьким обладнанням, і декодувальний пристрій, що реагує на згадану непов'язану з даними керуючу сигналізацію висхідної лінії зв'язку, для декодування інформації зворотного зв'язку відповідно до згаданого динамічно вибраного транспортного формату. Відповідно до четвертого аспекту даного винаходу, надається система, яка містить користувацьке обладнання відповідно до другого аспекту винаходу й базову станцію відповідно до третього аспекту винаходу. Відповідно до п'ятого аспекту даного винаходу, надається комп'ютерний програмний продукт, у якому програмний код зберігається на машиночитаному носії, причому згаданий програмний код при виконанні оброблювальним пристроєм реалізує наступне: (а) динамічний вибір символьного простору для непов'язаної з даними керуючої сигналізації зворотного зв'язку висхідної лінії зв'язку, і (b) відправлення вибраної керуючої сигналізації зворотного зв'язку висхідної лінії зв'язку з використанням вибраного символьного простору. Відповідно до шостого аспекту даного винаходу, надається пристрій, який містить засіб динамічного вибору символьного простору для непов'язаної з даними керуючої сигналізації зворотного зв'язку висхідної лінії зв'язку, і засіб відправлення вибраної керуючої сигналізації зворотного зв'язку висхідної лінії зв'язку з використанням вибраного символьного простору. Даний винахід надає спосіб для вибору комбінації транспортного формату (TFC) керуючих сигналів, що передаються разом з UL-даними (PUSCH). Крім того, він надає схему сигналізації для підтримання існуючого способу вибору транспортного формату. Крім того, він надає деякі способи для керування транспортним форматом, застосовуваним спільно використовуваним каналом даних. 3 UA 102227 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід указує, як вибрати кодування, і, зокрема, кількість символів, використовуваних для кодування внутрішньосмугової керуючої інформації відносно, наприклад, PUSCH, щоб одержати намічений BLER для сигналізації й даних, які, як правило, відрізняються. За допомогою даного винаходу сигналізація скорочується до мінімального рівня. Варто розуміти, що всі представлені ілюстративні варіанти здійснення можуть також використовуватися в будь-якому придатному сполученні. Переваги: Основною перевагою даного винаходу є те, що фізичні UL-ресурси можуть використовуватися більш ефективно. Це пов'язане з тим, що, якщо доступне тільки напівстатичне керування,то непродуктивні витрати, викликані непов'язаною з даними керуючою сигналізацією, не можуть оптимізуватися дійсно точно. Замість цього, ресурси каналу керування настроюються таким чином, щоб бути більш надійними, з погляду QoS керуючої сигналізації (це веде до більш високих непродуктивних витрат). З використанням схеми, яка розкривається докладно нижче, QoS непов'язаної з даними керуючої сигналізації, що передається разом з ULданими, може регулюватися й оптимізуватися гнучко, швидко й ефективно. Слід зазначити, що в різних сценаріях існують також інші причини, окрім аспекту аспект QoS, щоб динамічно змінювати формат непов'язаної з даними керуючої сигналізації. ТFCI-біт(и) може(уть) використовуватися в багатьох відношеннях: ● Вони можуть використовуватися для вибору між оптимізованими конфігураціями SIMO і МІМО. ● Вони можуть використовуватися для вибору деякої конфігурації "подушки безпеки" для непов'язаної з даними керуючої сигналізації (яка має найкращу можливу якість). Така конфігурація може вибиратися, наприклад, базовою станцією, якщо існує ризик того, що критична керуюча інформація пропаде в UL, і що під загрозою будуть робочі характеристики DL, наприклад, внаслідок недостатніх відомостей про якість UL-каналу. Такі випадки можуть виникати відносно пакетів даних після деякого часу бездіяльності, якщо не відбувається обмін фіктивними даними протягом часу бездіяльності для збереження потужності. Через відсутність обміну даними, базова станція вже не має оновлених відомостей ні про якість DL-каналу, ні про якість UL-каналу. Після надходження нових даних, наприклад, для DL, необхідно швидко одержати достовірний CQI, щоб мати можливість ефективно планувати ці дані. Однак, оскільки якість UL-каналу теж невідома, бажано вибирати конфігурацію для керуючої інформації UL, яка більш надійна. На це може витрачатися деяка частина пропускної здатності UL, але це дозволяє досягти кращої пропускної здатності DL і якості обслуговування. ● Вони можуть використовуватися для динамічного вибору між різними величинами CQI (попередньо виділеними для певної схеми повідомлення CQI), наприклад, на основі швидких змін у середовищі поширення. Цими перевагами не вичерпуються можливі переваги даного винаходу. Недоліки: ● Додаткове навантаження сигналізації (1-3 біти), пов'язане з сигналізацією надання розподілу UL. Інші завдання й ознаки даного винаходу стануть очевидними з наступного докладного опису при розгляді разом із прикладеними кресленнями. Варто розуміти, однак, що креслення призначені винятково для ілюстрації, а не як окреслення обсягу даного винаходу, за яким варто звертатися до прикладеної формули винаходу. Додатково варто розуміти, що креслення не виконані в масштабі й вони призначені лише для ілюстрації принципових структур і процедур, описуваних у даному документі. КОРОТКИЙ ОПИС КРЕСЛЕНЬ Фіг. 1 є блок-схемою послідовності операцій способу, що демонструє спосіб обробки, який може здійснюватися на користувацькому обладнанні, згідно з даним винаходом. Фіг. 2 є блок-схемою послідовності операцій способу, що демонструє спосіб обробки, який може здійснюватися на базовій станції, згідно з даним винаходом. Фіг. 3 демонструє пристрій обробки сигналів загального призначення, який може використовуватися в користувацькому обладнанні для здійснення способу обробки, зображеного на Фіг. 1, або в базовій станції для здійснення способу обробки, зображеного на Фіг. 2, або в обох з них. Фіг. 4 показує приклад сценарію, у якому може використовуватися даний винахід, коли базова станція динамічно приймає рішення відносно символьного простору, який буде використовуватися користувацьким обладнанням у його сигналізації зворотного зв'язку, що включена до складу висхідної лінії зв'язку, яка також включає в себе дані, що передаються по висхідній лінії зв'язку. ЗДІЙСНЕННЯ ВИНАХОДУ 4 UA 102227 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 1 є блок-схемою послідовності операцій способу, що демонструє спосіб обробки, який може здійснюватися на користувацькому обладнанні, згідно з даним винаходом. Спосіб обробки може здійснюватися за допомогою обробки сигналів будь-якого типу. Після входження на етапі 102, виконується етап 104 для динамічного вибору символьного простору, який буде використовуватися для сигналізації висхідної лінії зв'язку, такої, як непов'язана з даними керуюча сигналізація зворотного зв'язку висхідної лінії зв'язку. Потім, на етапі 106, спосіб 100 обробки змушує користувацьке обладнання відправити керуючу сигналізацію зворотного зв'язку висхідної лінії зв'язку з використанням вибраного символьного простору. Після цього спосіб обробки повертається в точку виклику на етапі 108. Фіг. 2 показує спосіб 200 обробки, який може здійснюватися на базовій станції, згідно з даним винаходом. Після входження на етапі 202, виконується етап 204 для динамічного вибору символьного простору, який буде використовуватися для сигналізації висхідної лінії зв'язку, такої, як непов'язана з даними керуюча сигналізація зворотного зв'язку висхідної лінії зв'язку. Потім, на етапі 210, спосіб 200 обробки змушує базову станцію відправити керуючу сигналізацію зворотного зв'язку висхідної лінії зв'язку на користувацьке обладнання по низхідній лінії зв'язку для надання йому команди використовувати вибраний символьний простір. Не показаний етап, на якому базова станція може зберігати вибраний символьний простір для використання в майбутньому при прийомі сигналізації висхідної лінії зв'язку від користувацького обладнання. Після цього спосіб обробки повертається в точку виклику на етапі 220. Таким чином, хоча на етапі 104, зображеному на Фіг. 1, користувацьким обладнанням могло б прийматися самостійне рішення, на Фіг. 2 показано, що вибір символьного простору може бути фактично продиктований користувацькому обладнанню базовою станцією на попередньому етапі 210 сигналізації. У цьому випадку, етап 104, зображений на Фіг. 1, являє собою вибір з боку КО символьного простору під впливом керуючої сигналізації, відправленої на попередньому етапі 210, зображеному на Фіг. 2. Фіг. 3 демонструє пристрій обробки сигналів загального призначення, який може використовуватися в користувацькому обладнанні для здійснення способу 100 обробки, зображеного на Фіг. 1. Такий оброблювальний пристрій включає в себе ЦПП, ОЗП, ПЗП, порт вводу/виводу, тактовий генератор і різноманітні інші компоненти, взаємозв'язані за допомогою ліній передачі даних, адрес і елементів керування, і може також використовуватися на базовій станції для здійснення способу 200 обробки, зображеного на Фіг. 2. Якщо для здійснення способу 100 обробки або способу 200 обробки використовується програмне забезпечення, воно може приймати форму кодованих інструкцій, втілених на машиночитаному носії. Варто розуміти, однак, що один або обидва із цих способів 100, 200 обробки можуть замість цього здійснюватися оброблювальними пристроями іншого типу, що включають у себе, але не обмежені цим, спеціалізоване апаратне забезпечення, таке як інтегральна схема. Фіг. 4 показує необмежувальний приклад сценарію, у якому може використовуватися даний винахід, коли базова станція 402 динамічно вибирає символьний простір, який буде використовуватися користувацьким обладнанням 404 у його сигналізації зворотного зв'язку, включеній до складу висхідної лінії 406 зв'язку, яка також включає в себе дані, що передаються по висхідній лінії зв'язку. Така сигналізація переноситься по так званому непов'язаному з даними каналу керування або каналу сигналізації висхідної лінії 406 зв'язку. Пристрій вибору (не показаний, але який може приймати форму оброблювального пристрою, зображеного на Фіг. 3) на базовій станції динамічно вибирає символьний простір (відповідно до етапу 204, зображеного на Фіг. 2), який буде використовуватися поряд з деякими пов'язаними параметрами, які будуть запропоновані користувацькому обладнанню для використання користувацьким обладнанням, застосовно до каналу сигналізації висхідної лінії зв'язку на висхідній лінії 406 зв'язку. Вона могла б включати в себе, наприклад, сигнал вхідного розміру по лінії 410, сигнал схеми кодування по лінії 412, а так само сигнал символьного простору по лінії 414. Такі сигнали в більшості випадків надаються, як показано, по лінії 416 на кодувальний пристрій, поряд з даними, що надходять по лінії 418 на кодувальний пристрій 420. При здійсненні етапу 220, зображеного на Фіг. 2, кодувальний пристрій надає вихідний сигнал по лінії 421, у якому дані об'єднуються із сигналізацією 410, 412, 414, для передачі через антену по низхідній лінії 422 зв'язку на користувацьке обладнання 404. Після прийому антеною 423 на користувацькому обладнанні, прийнятий низхідний сигнал по лінії 424 надається декодувальному пристрою 426 на КО 404. Він декодує дані, раніше закодовані по лінії 418, і надає декодований сигнал даних по лінії 428 для використання в КО 404. Декодувальний пристрій також надає зчитуваний сигнал по лінії 430, який свідчить про якість низхідної лінії зв'язку. Його вимірювання може здійснюватися в компоненті 432 вимірювання, який потім надає сигнал (зворотного зв'язку) індикатора якості каналу по лінії 434 на кодувальний пристрій 436. 5 UA 102227 C2 5 10 15 20 25 30 35 40 45 50 55 60 Декодувальний пристрій 426 також надає командний сигнал по лінії 438 на кодувальний пристрій 436, який має інформацію, що міститься в ньому, яка щонайменше вказує на інформацію про символьний простір, відправлену від базової станції, а також, можливо, іншу інформацію, що містилася в передачі по лінії 416. Після цього кодувальний пристрій здійснює етапи 104, 106, зображені на Фіг. 1, для динамічного вибору й використання символьного простору для непов'язаної з даними сигналізації висхідної лінії зв'язку. Якщо декодовані дані по лінії 428 приймаються правильно, на кодувальний пристрій 436 по лінії 440 відправляється сигнал ACK. У іншому випадку може бути відправлене NACK. Сигнальні дані, призначені для висхідної лінії зв'язку, надаються по лінії 442 на кодувальний пристрій 436 і об'єднуються з інформацією CQI і ARQ для виведення по лінії 450 від кодувального пристрою 436 на антену для передачі по висхідній лінії 406 зв'язку на базову станцію. Декодувальний пристрій 456 на базовій станції використовує сигнал 434 висхідної лінії зв'язку CQI для сприяння в здійсненні етапу 204 для наступного динамічного вибору символьного простору для непов'язаної з даними керуючої сигналізації зворотного зв'язку висхідної лінії зв'язку, що буде використовуватися на висхідній лінії 406 зв'язку. Схема вибору транспортного формату У продемонстрованому варіанті здійснення, конфігурування транспортного формату непов'язаних з даними каналів 434, 440 керування, що передається разом з UL-даними 442, розділяється на дві частини, (1) напівстатична частина й (2) динамічна частина. Напівстатична частина Напівстатична частина використовується для конфігурування можливих транспортних форматів для непов'язаних з даними каналів керування. Можна сконфігурувати TFC таким чином, щоб різні керуючі сигнали (наприклад, CQI) мали: ● Різний розподіл символьного простору (тобто кількість вихідних бітів кодувального пристрою 436) при різних TFC. ● Різну кількість вхідних бітів (тобто схема кодування CQI) при різних TFC. Також можливо сконфігурувати таку TFC, у якій CQI-повідомлення не передається всім (нульові CQI-біти). Частина динамічного керування Динамічні параметри використовуються для вибору однієї з декількох попередньо заданих комбінацій транспортного формату для кожної MCS для непов'язаних з даними керуючих сигналів, що передаються разом з UL-даними. Вибір транспортного формату У продемонстрованому варіанті здійснення, пристрій вибору на eNodeB вибирає фактичну комбінацію транспортного формату, враховуючи: ● Службові вимоги, пов'язані з каналом UL-даних (наприклад, робоча точка BLER). ● Розподіл смуги пропускання каналу UL-даних (тобто скільки одиниць ресурсу). ● Виміряне QoS UL (SINR, BLER, характеристики каналу даних). ● Можливий режим МІМО (UL/DL). ○ Віртуальний МІМО для UL: Комбінації транспортного формату можуть оптимізуватися окремо для використання в режимах SIMO і віртуальних МІМО (вибраний режим змінюється динамічно відповідно до рішень пристрою планування UL). Віртуальний МІМО повинен одержувати перевагу при застосуванні розсіювання блоків для множинних потоків керування, тоді як у випадку SIMO сигналізація оптимізується, коли розсіювання не застосовується. ○ SIMO/MIMO-передача по DL: Кількість бітів зворотного зв'язку відрізняється в SIMO і різних МІМО режимах. Комбінація транспортного формату може оптимізуватися окремо для використання в SIMO і різних МІМО режимах. Операція узгодження швидкості каналу(ів) UL-даних ґрунтується на комбінації транспортного формату, вибраної для непов'язаних з даними каналів керування. Наприклад, узгодження швидкості може використовуватися для каналу(ів) UL-даних, щоб підбирати дані, які будуть використовувати ті символи, доступні для передач, які не були призначені для непов'язаних з даними керуючих сигналів. Схема сигналізації транспортного формату Сигналізація більш високого рівня використовується для конфігурування застосовуваних комбінацій транспортного формату для непов'язаних з даними керуючих сигналів, що передаються разом з UL-даними. ● Кількість TFC, сконфігурованих на більш високому рівні, повинна бути обмежена відносно малим числом, щоб уникнути надмірного навантаження сигналізації, зокрема для обмеження кількості бітів, необхідних для повідомлення TFC, яка буде використовуватися в конкретному ТТІ. 6 UA 102227 C2 5 10 15 20 25 30 35 40 45 50 55 60 ● Представляється, що чотирьох рівнів квантування було б достатньо у практичній роботі. ● Точне співвідношення між TFCI-бітами й змістом TFC є настроюваним (RRC-сигналізація). TFCI-сигналізація може додатково оптимізуватися за рахунок зміни конфігурації набору TFC "на льоту", у міру переміщення КО, наприклад, від центра стільника до границі стільника. Як було зазначено вище, динамічна керуюча сигналізація може використовуватися для вибору фактичного транспортного формату, використовуваного для непов'язаної з даними керуючої сигналізації. Така сигналізація може передаватися по низхідній лінії 422 зв'язку в складі/разом із сигналізацією надання розподілу UL. 2(1) біти могли б, наприклад, знадобитися для конфігурування 4(2) різних комбінацій транспортного формату для непов'язаної з даними керуючої сигналізації. Такі додаткові динамічні сигнальні біти можуть розглядатися як "Динамічний TFCI". Якщо вже передбачене включення сигнального біта до складу сигналізації надання розподілу UL для повідомлення про те, передане чи ні відповідне надання розподілу DL (і, отже, ACK/NACK повинно передаватися як непов'язана з даними керуюча сигналізація), це також могло б бути пристосоване для цілей даного винаходу. Слід зазначити, що наявність 2 бітів, зарезервованих для цього позначення в сполученні з Динамічним TFCI, дозволить використовувати ці біти таким чином, щоб одне слово сигналізації (наприклад, "00") відповідало випадку, коли ACK/NACK відсутній, тоді як інші слова сигналізації ('01', '10' і '11') можуть представляти розмір ACK/ NACK-pecypcy, коли ACK/NACK присутній. При цій оптимізації необхідний тільки один додатковий біт поверх біта, який використовується для позначення присутності сигналу ACK/NACK у попередньому рівні техніки, щоб мати можливість повідомлення 3 різних TFCI, які використовуються для цього сигналу ACK/NACK. Якби ця інформація використовувалася самостійно, один додатковий біт міг би позначати тільки два різних TFCI, приводячи до досить грубого квантування. Явний індикатор сегментації "Явний індикатор сегментації", що передається із сигналізацією динамічного розподілу ресурсів, може розглядатися як додатковий приклад цього винаходу. Цей індикатор міг би використовуватися, наприклад, в VoIP-додатку. ● На границі стільника може не бути можливості передати пакет даних (скажімо, VoIP-пакет) у єдиному ТТІ. Тоді пакет може передаватися з використанням двох HARQ-передач, у так званому штатному режимі, коли перша передача з високою ймовірністю завершується невдало, і необхідний Коефіцієнт помилок по блоках досягається після другої передачі. Звичайно, як альтернатива, завжди можна розділити VoIP-пакет на два пакети, але це значно знизить ефективність кодування, оскільки кожний з пакетів більш короткий, а ефективність кодування турбокодів значно знижується внаслідок сортування пакетів (VoIP-пакети не дуже великі в кожному випадку). Крім того, можна використовувати більш високу кодову швидкість для первісної передачі й завжди покладатися на повторну передачу(і), але тоді стандартний метод узгодження швидкості спочатку відправить всі системні біти і тільки потім біти контролю парності. Це небажано, а також це свідчить про поганий пристрій перемежовування. У випадку явної сегментації, тобто, якщо внесено інформацію, сегментація якої повинна використовуватися (наприклад, за допомогою сигнального біта або іншим способом), ця інформація може використовуватися для оптимізації визначення варіантів надмірності, які спеціально оптимізуються для цього випадку. Тоді варіант надмірності може бути визначений, наприклад, таким чином, щоб парні й непарні біти передавалися в циклах з парними й непарними номерами. Якщо перша передача припадає на непарний номер циклу (або номер ТТІ, або номер підциклу, або інший придатний ідентифікаційний номер певного пакета), то передаються тільки непарні біти. Конкретніше, серед тих бітів, які повинні бути передані, якщо для передачі пропонувалося вдвічі більше бітів, вибираються тільки непарні біти. Це дає точну кількість бітів, які підлягають передачі. Для наступного пакета, який буде знаходитися в циклі з парним номером (або відповідним номером), вибираються парні біти. Таким чином, після прийому обох пакетів, приймальний пристрій має в наявності саме ті біти, які підлягали б гіпотетичній передачі, яка дозволила б передати вдвічі більше бітів, ніж у дійсності можливо. Узгодження швидкості призначається для забезпечення оптимального вибору (у рамках практичних обмежень, наприклад, складності) для даної кількості бітів. Отже, пропонований алгоритм досягне (практично) оптимального вибору бітів при об'єднанні двох передач. Відповідно до існуючого рівня техніки, алгоритм узгодження швидкості повинен вибрати варіант надмірності, який був оптимальним для першої передачі, однак це безглуздо, оскільки перша передача практично визнається невдалою в будь-якому випадку через нестачу доступної потужності передачі, або через те, що швидкість кодування точно більше 1. Відповідно до попереднього рівня техніки, об'єднані перша й друга передачі не будуть ідеальними. Зокрема, з 7 UA 102227 C2 5 10 15 20 25 30 35 40 урахуванням попереднього рівня техніки, перша передача повинна містити винятково або переважно системні біти, тоді як друга передача повинна містити переважно або винятково біти контролю парності. Очевидно, що це не є гарним розподілом цих двох типів бітів по двох ТТІ. ● Один метод збереження одного сигнального біта у випадку сегментації полягає в тому, щоб не резервувати ACK/NACK-ресурс, відповідний першому ТТІ (перша передача майже завжди містить помилку в такому випадку, так що майже завжди не дуже корисно (неінформативно) відправляти NACK після першої передачі). ● Якщо такий біт сегментації присутній, то, згідно з даним винаходом, значимість сигналізації TFCI для непов'язаної з даними керуючої сигналізації переглядається, оскільки вона є ознакою того, що має місце порівняно низька якість каналу UL (щонайменше занадто низька для передачі пакета в єдиному сеансі зв'язку). У загальному випадку, будуть ставитися у відповідність більш надійні TFCI, у порівнянні з випадком, коли сегментація (або штатний режим) не вказується. Іншим випадком використання для динамічного індикатора є керування потужністю передачі, використовуваною в повторних передачах HARQ. Повторна передача HARQ використовується, якщо перша передача не була успішною. Стосовно HARQ, приймальний пристрій використовує як перший прийом (який зазнав невдачі при декодуванні окремо), так і другий прийом, тоді як традиційний ARQ використовує тільки другий прийом. Тому для HARQ повторна передача, як правило, може відправлятися з більш низькою потужністю, відповідно з більш низьким SNR. Отже, для повторних передач повинно використовуватися більше символів для непов'язаної з даними керуючої сигналізації, у порівнянні з первісними передачами, якщо в іншому використовуються ті ж самі параметри. Той факт, що передача є повторною передачею, може бути встановлений на основі інформації стосовно використовуваної інформації надмірності, при цьому повторна передача нумерує новий індикатор даних, який позначає передачу нового пакета, або подібну інформацію. Динамічний індикатор може також використовуватися для позначення ситуації, коли є необхідність виколювання більшого числа бітів для керування, ніж у позаштатному режимі. Фактично, це може бути менше ніж один біт, якщо всі біти зібрані в одну повну таблицю варіанта надмірності, таку, як робиться для EDCH. У цьому випадку немає окремих бітів для індикатора сегментації й динамічного індикатора, а замість цього всі біти об'єднуються разом для задавання індикатора в повну таблицю, що включає в себе як індикатор сегментації, так і динамічний індикатор, або як індикатор сегментації, так і TFC. Ця таблиця може задаватися попередньо або повідомлятися подібно таблиці, яка вже була описана для встановлення відповідності динамічного індикатора з TFC. У Таблицях 1-4 показані приклади схем сигналізації згідно з даним винаходом. У Таблиці 1 представлений формат сигналізації з однобітовою TFCI-сигналізацією. У Таблиці 2 показаний інший приклад сигналізації з однобітовою TFCI-сигналізацією. У Таблиці 2 розмір області MCS скорочується з 5 до 3 (у порівнянні з Таблицею 1). У Таблиці 3 показаний приклад, у якому сигналізація ґрунтується тільки на динамічній TFCI-сигналізації із двома бітами. У Таблиці 4 показаний приклад, у якому динамічна сигналізація використовується для конфігурування кількості вхідних бітів CQI-сигналізації. Таблиця 1 Приклад формату сигналізації згідно з даним винаходом Тип елемента керування Розмір елемента керування (кількість вхідних бітів) Динамічний TFCI MCS1 MCS2 Символьний простір каналу керування як функція MCS MCS3 каналу даних MCS4 MCS5 A/N CQI A/N CQI 1 біт 10 бітів 1 біт 10 бітів 5 8 16 24 48 2 8 16 24 48 0 1 4 8 12 24 8 1 8 12 24 36 72 UA 102227 C2 Таблиця 2 Інший приклад формату сигналізації згідно з даним винаходом Тип елемента керування Розмір елемента керування (кількість вхідних бітів) Динамічний MCS1 Символьний простір каналу керування як функція MCS MCS2 каналу даних MCS3 A/N CQI A/N CQI 1 біт 10 бітів 1 біт 10 бітів 5 8 16 12 16 24 0 1 2 4 8 24 36 48 Таблиця 3 Ще один приклад формату сигналізації згідно з даним винаходом Тип елемента керування Розмір елемента керування (кількість вхідних бітів) Динамічний Символьний MCS1 простір каналу керування як MCS2 функція MCS каналу даних A/N CQI A/N CQI A/N CQI A/N CQI 1 біт 10 бітів 1 біт 10 бітів 1 біт 10 бітів 1 біт 10 бітів 1 5 2 10 4 15 8 20 12 24 16 32 20 40 24 48 0 1 2 3 Таблиця 4 Додатковий приклад формату сигналізації згідно з даним винаходом Тип елемента керування Розмір елемента керування (кількість вхідних бітів) Динамічний MCS1 Символьний простір каналу керування як функція MCS MCS2 каналу даних MCS3 5 10 15 20 A/N CQI A/N CQI 1 біт 10 бітів 1 біт 40 бітів 5 8 16 12 16 24 0 2 4 8 1 20 32 64 У пропонованій схемі сигналізації настроюваними параметрами є: ● CQI (кількість вхідних бітів кодувального пристрою) і розміри ACK/NACK. ● Кількість вихідних бітів кодувального пристрою (схема кодування для CQI). ● Схема кодування. ● Символьний простір для непов'язаної з даними керуючої сигналізації ○ окремо для різних схем модуляції й кодування, використовуваних каналом UL-даних, ○ окремо для різних транспортних форматів непов'язаного з даними каналу керування. Слід зазначити, що схема модуляції й кодування, застосовувана для каналу UL-даних, може зіставлятися з різними транспортними форматами різними способами: ● Модуляція - визначений метод ○ MCS1 - - - 64QAM, ○ MCS2 - - - 16QAM, ○ MCS3 - - - QPSK. ● Схема модуляції й кодування - визначений метод ○ MCS1 - - - 16QAM, ECR>2/3, ○ MCS2 - - - 16QAM, ECR2/3, ○ MCS4 - - - QPSK, ECR
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive transport format uplink signaling for data-non-associated feedback control signals
Автори англійськоюPajukoski, Kari, Raaf, Bernhard, Tiirola, Esa
Назва патенту російськоюСигнализация восходящей линии связи адаптивного транспортного формата для не связанных с данными управляющих сигналов обратной связи
Автори російськоюПаюкоски Кари, Рааф Бернхард, Тиирола Эса
МПК / Мітки
МПК: H04L 1/00
Мітки: даними, зв'язку, зворотного, висхідної, сигналів, непов'язаних, адаптивного, формату, керуючих, сигналізація, транспортного, лінії
Код посилання
<a href="https://ua.patents.su/16-102227-signalizaciya-viskhidno-lini-zvyazku-adaptivnogo-transportnogo-formatu-dlya-nepovyazanikh-z-danimi-keruyuchikh-signaliv-zvorotnogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Сигналізація висхідної лінії зв’язку адаптивного транспортного формату для непов’язаних з даними керуючих сигналів зворотного зв’язку</a>
Інформація зворотного зв’язку про запас затримки висхідної лінії зв’язку
Номер патенту: 97732
Опубліковано: 12.03.2012
Автори: Хо Саі Йіу Дункан, Дамняновіч Алєксандар
МПК: H04W 28/00
Мітки: запас, зв'язку, лінії, затримки, зворотного, інформація, висхідної
Формула / Реферат:
1. Спосіб, який полегшує забезпечення інформації зворотного зв'язку про запас затримки висхідної лінії зв'язку в середовищі бездротового зв'язку, який включає:визначення найнижчого запасу затримки з множини блоків службових даних (блоків SDU) Керування Лінією Радіозв'язку (RLC), причому найнижчий запас затримки являє собою величину часу, що залишився до перевищення відповідного обмеження затримки;конфігурування частини...
Відображення передачі підтвердження висхідної лінії зв’язку на основі блоків віртуальних ресурсів низхідної лінії зв’язку
Номер патенту: 93142
Опубліковано: 10.01.2011
Автор: Малладі Дурга Прасад
МПК: H04L 1/16
Мітки: лінії, висхідної, відображення, ресурсів, передачі, блоків, низхідної, основі, зв'язку, віртуальних, підтвердження
Формула / Реферат:
1. Спосіб для відображення розміщення підтвердження (АСК) висхідної лінії зв'язку (UL) користувацького обладнання (UE) на основі розподілення ресурсів низхідної лінії зв'язку (DL) у безпровідній системі зв'язку з пакетами даних, який включає:динамічне планування UE за допомогою розподілення ресурсів щонайменше одного DL блока віртуальних ресурсів (VRB), іприйом ідентифікатора (ID) UL АСК, який неявно відображається на...
Спосіб і пристрій для виведення часової шкали передачі каналу керування низхідної лінії зв’язку при підтримці розширеної роботи висхідної лінії зв’язку
Номер патенту: 90871
Опубліковано: 10.06.2010
Автор: Вілленеггер Серж Д.
МПК: H04B 7/26
Мітки: виведення, передачі, шкали, висхідної, часової, низхідної, розширеної, підтримці, спосіб, зв'язку, роботи, пристрій, лінії, каналу, керування
Формула / Реферат:
1. Віддалена станція для безпровідного зв'язку, яка міститьпередавач, призначений для передачі пакетних даних по каналу висхідної лінії зв'язку на базову станцію, іприймач, призначений дляприйому від базової станції виділеного фізичного каналу (DPCH) на першому кадрі, перший кадр має перший зсув за часом відносно часової шкали, асоційованої з первинним спільним фізичним каналом керування (Р-ССРСН), іприйому від...
Спосіб керування потужністю передачі висхідної лінії зв’язку
Номер патенту: 83653
Опубліковано: 11.08.2008
Автори: Хванг Сеунг Хоон, Кім Бонг Хоє, Ахн Дзоон Куі
МПК: H04M 1/00
Мітки: передачі, керування, спосіб, лінії, зв'язку, висхідної, потужністю
Формула / Реферат:
1. Спосіб керування потужністю передачі висхідної лінії зв'язку, який полягає в тому, щопри м'якій передачі обслуговування з множиною базових станцій обчислюють в терміналі значення команд для множини базових станцій, які передають в термінал команди керування потужністю; ізменшують потужність передачі висхідної лінії зв'язку, якщо значення команд, обчислені для множини базових станцій, включають в себе щонайменше одне значення...
Керування наданням висхідної лінії зв’язку у відповіді довільного доступу
Номер патенту: 101049
Опубліковано: 25.02.2013
Автори: Мейлан Арно, Монтохо Хуан
МПК: H04W 74/00
Мітки: керування, довільного, висхідної, відповіді, зв'язку, лінії, наданням, доступу
Формула / Реферат:
1. Спосіб декодування надання, що включає в себе:прийом надання по каналу низхідної лінії зв'язку, причому довжина частини надання була скоригована; іінтерпретацію призначення блоків ресурсів цієї частини надання, причому інтерпретація призначення блоків ресурсів основана на числі блоків (NRBUL) ресурсів висхідної лінії зв'язку.2. Спосіб за п. 1, який додатково включає в себе виявлення частини надання зі скоректованою...
Попередній патент: Система охолодження металургійного агрегату
Наступний патент: Стабільна подвійна емульсія
Випадковий патент: Пристрій захисної комутації для розряду конденсаторних батарей