Система орієнтації сонячного модуля
Номер патенту: 111892
Опубліковано: 24.06.2016
Автори: Александров Олександр Віталійович, Тарасов Сергій Васильович, Фролов Сергій Валерійович, Дзензерський Віктор Олександрович, Буряк Олександр Афанасійович
Формула / Реферат
Система орієнтації сонячного модуля, що містить опору, кінематичну систему, що скомпонована із вузлів азимутального та зенітального повороту, а також сонячний модуль, пристрій обробки сигналу і таймер, яка відрізняється тим, що в ролі опори для монтажу сонячного модуля використовується об'єкт господарського чи житлового призначення, на яких модуль встановлюють за допомогою змінного вузла кріплення, кінематична система має силовим центром опорний вузол, що містить трубчастий шток, який вставлений з можливістю обертання в нерухому втулку, втулка жорстко закріплена за допомогою платика на муфті вузла кріплення, причому вісь обертання штока вертикальна і не змінює положення при будь-яких режимах роботи кінематичної системи, шток виступає вільними кінцями за межі втулки, при цьому верхній виступ його оснащений фланцем, що ковзає по круговій полиці втулки і запобігає вертикальному зсуву штока, торець верхнього виступу з'єднаний карданною передачею з валом двигуна постійного струму, який жорстко зчеплений з вузлом кріплення за допомогою кронштейна та разом з підвіскою модуля і штоком є вузлом азимутального повороту, до нижнього виступу штока шарнірно прикріплений вузол зенітального повороту, який являє собою кінематичну пару і містить незалежний приводний двигун постійного струму, вал якого жорстко з'єднаний з гвинтом, який входить при обертанні в гайку, що переміщує стрижень штовхача, весь вузол змонтований всередині патрона, відкритого з боку, протилежного двигуну, для виходу стрижня штовхача, виступаючий кінець стрижня шарнірно з'єднаний з центром нижньої рейки консолі модуля, консоль є площинною конструкцією, на якій монтуються фотоелектричні комірки модуля, і виконана у вигляді рами, що складається з декількох рознесених з отворами стулок, зашитих неметалевими фільонками і встановлених в одній площині, причому центральний збільшений отвір служить для вільного проходу вузлів кінематичної системи у всіх фазах нахилу консолі, стулки з'єднані між собою за допомогою горизонтального імпоста, виконаного у вигляді вала, закріпленого на середині висоти рами, і нижньої рейки, рама з'єднана зі штоком вузла азимутального повороту за допомогою манжети, жорстко пов'язаної з горизонтальною муфтою, через яку пропущений імпост, а з штовхачем вузла зенітального повороту вона з'єднана за допомогою шарніра, пристрій для обробки сигналу виконано у вигляді вузла управління з мікропроцесором, що працює за багатопараметричною програмою річної проводки модуля, яка реалізує поточний циклічний добовий сценарій повороту модуля, з прив'язками до широтних і річних циклів, відступи від штатної програми проводяться у вигляді вставних епізодів, зміст яких полягає у виведенні площини модуля в пасивне, вертикальне, положення при падінні освітленості нижче критичного значення, причому після відновлення рентабельного рівня освітленості модуль повертається в робочу позицію, відповідну поточному часу, і програма продовжує виконуватися з пропуском часу відстою, а інформацію про ступінь освітленості отримують шляхом вимірювання величини струму в контурі видачі потужності і передають в блок управління, таймер включений у вигляді додатку в програму добової проводки модуля, при цьому корекція орієнтації модуля виконується дискретно, для чого вузол азимутального повороту через кожні 100 хвилин повертає модуль на 20-25° за сонцем - 9 разів за літній сонячний день, а вузол зенітального повороту змінює кут нахилу 3 рази за світловий день, вранці з 90° до 25°, опівдні з 25° до 50°, ввечері з 50° до 25°.
Текст
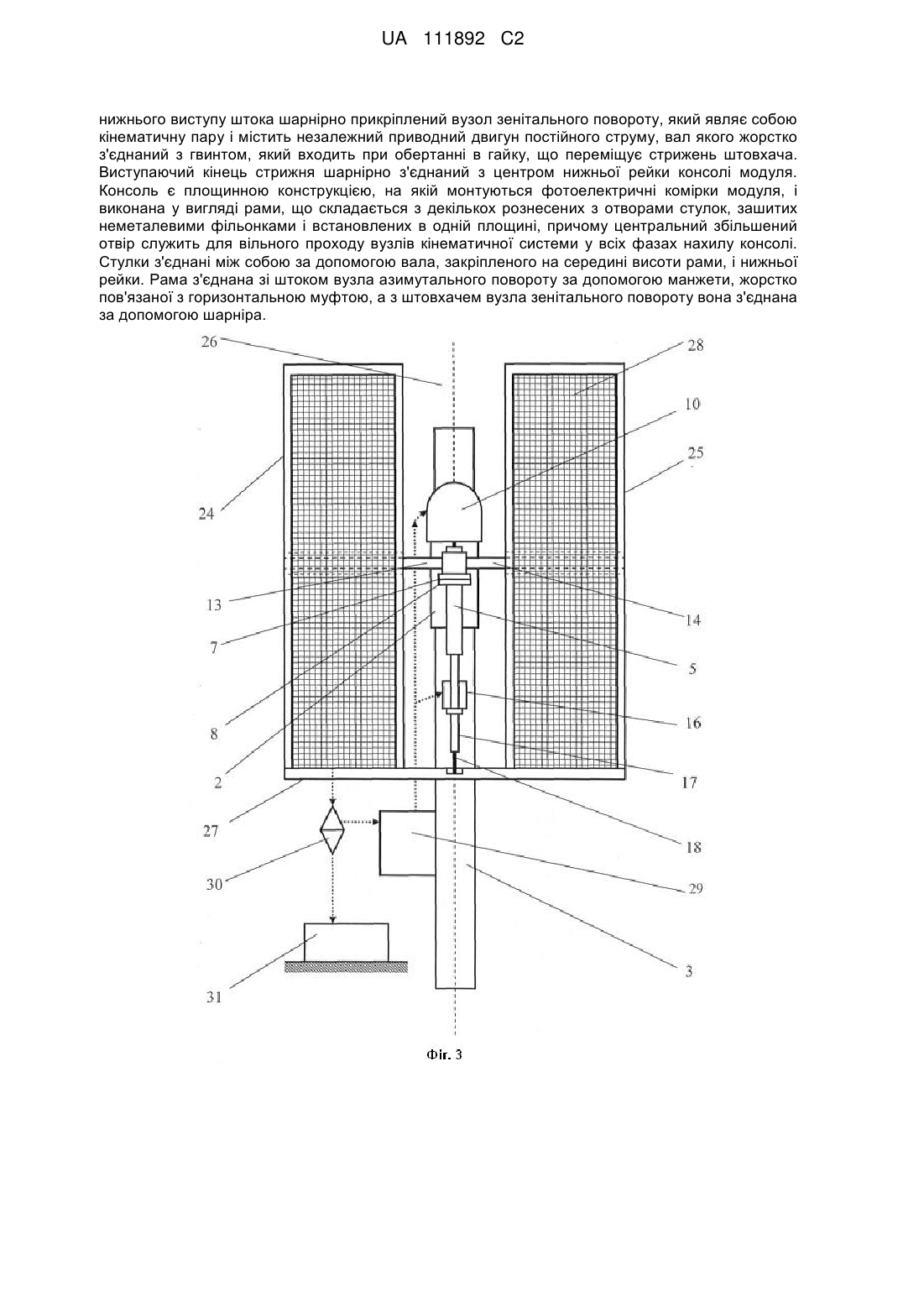
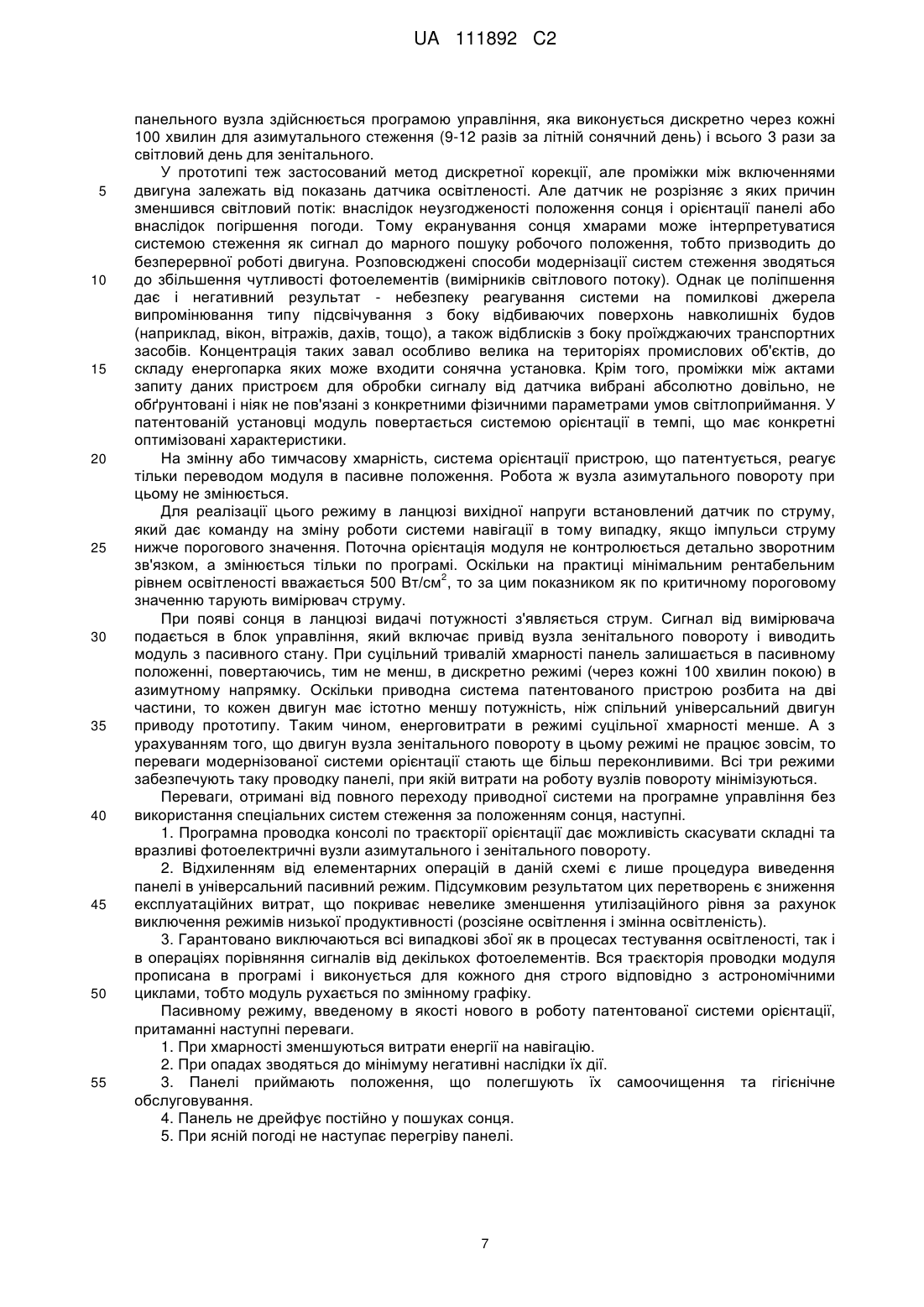
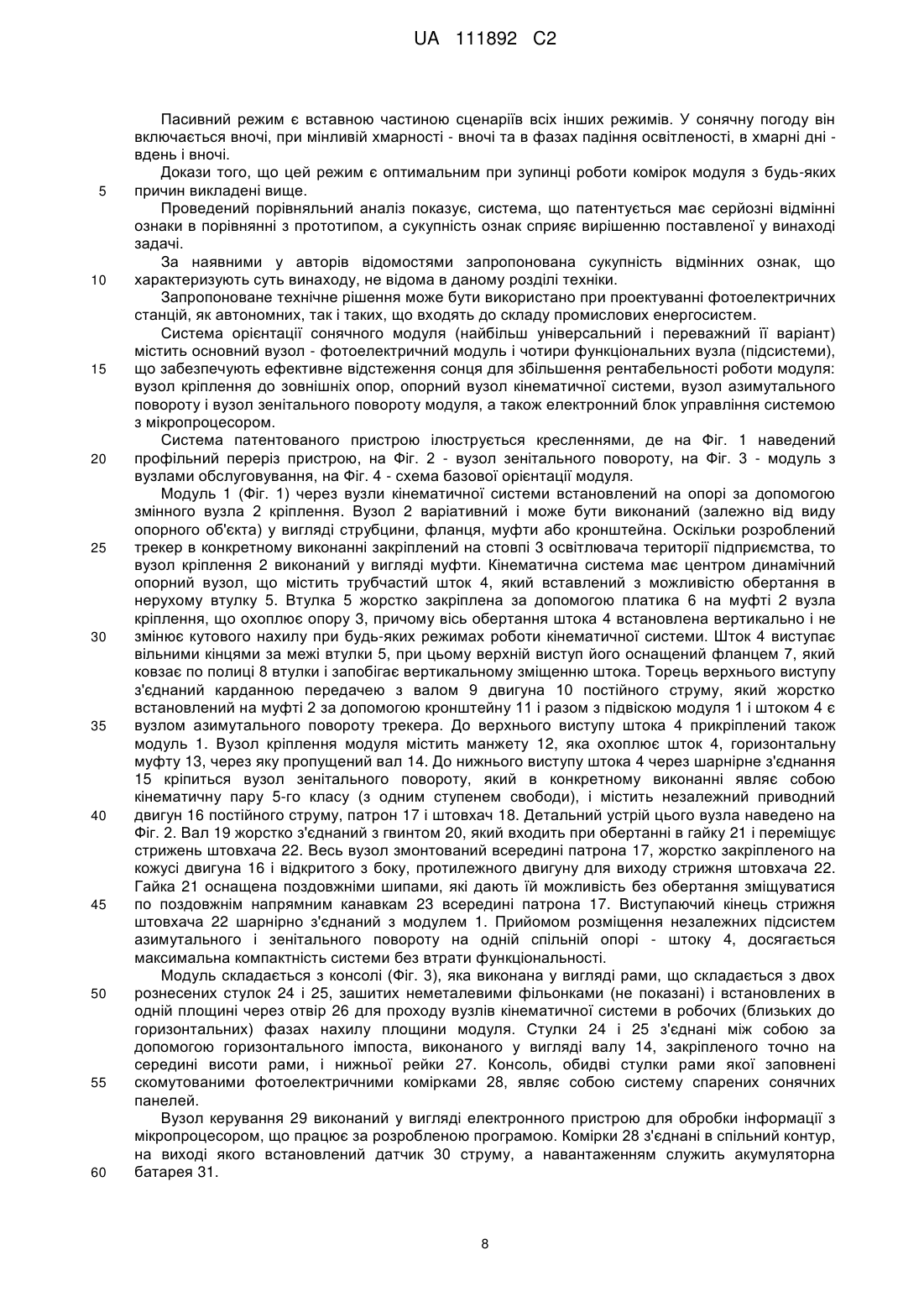
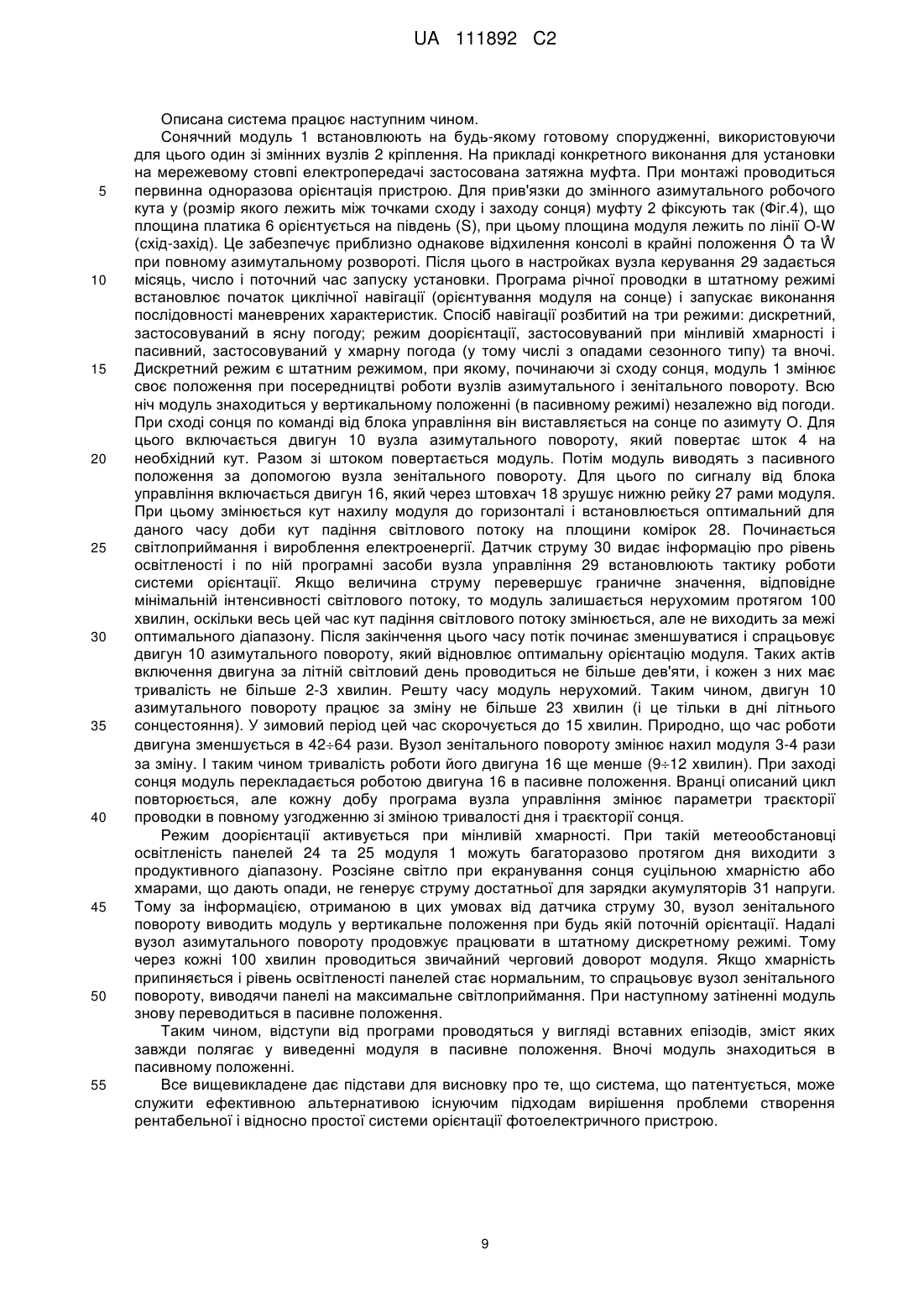
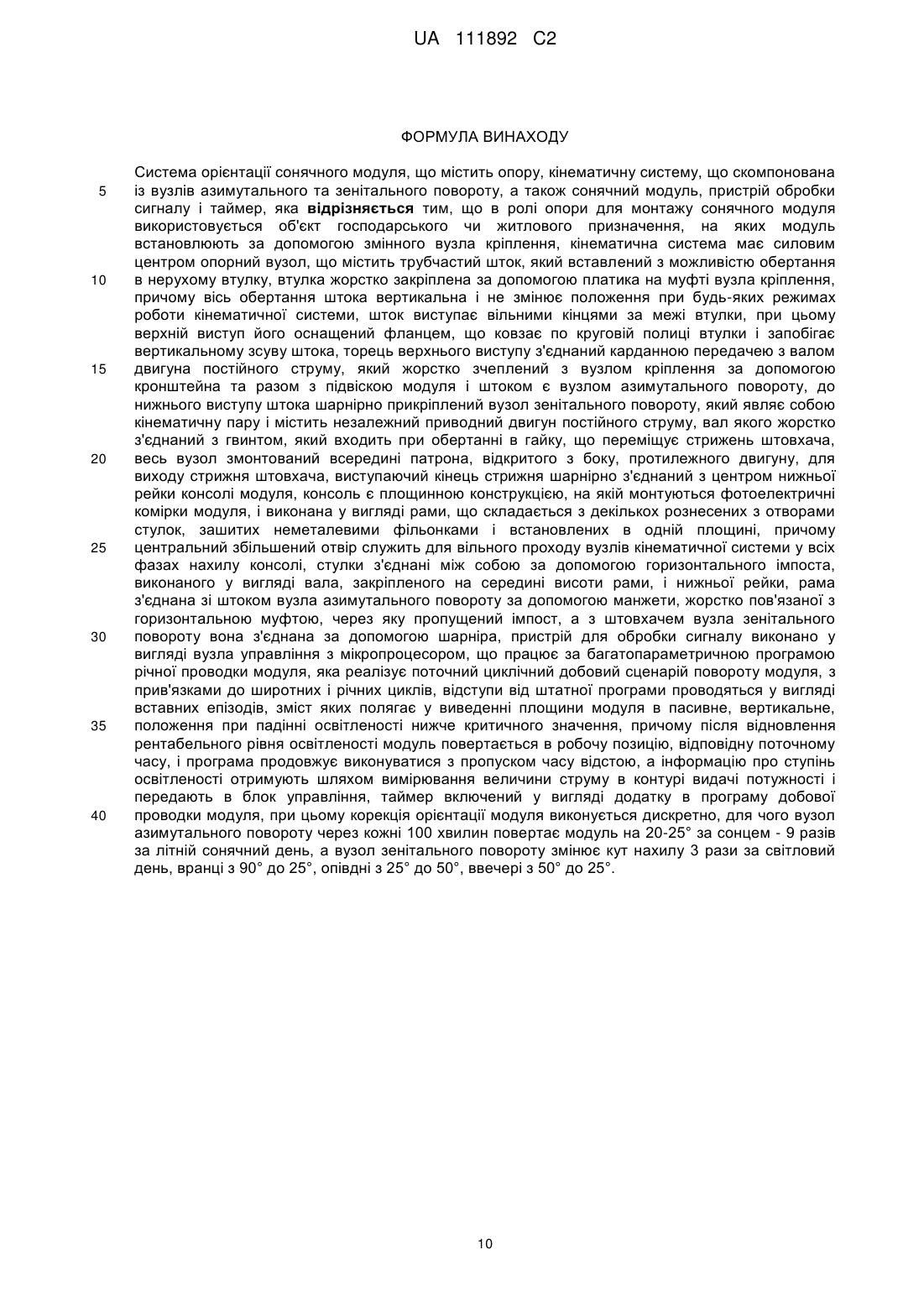
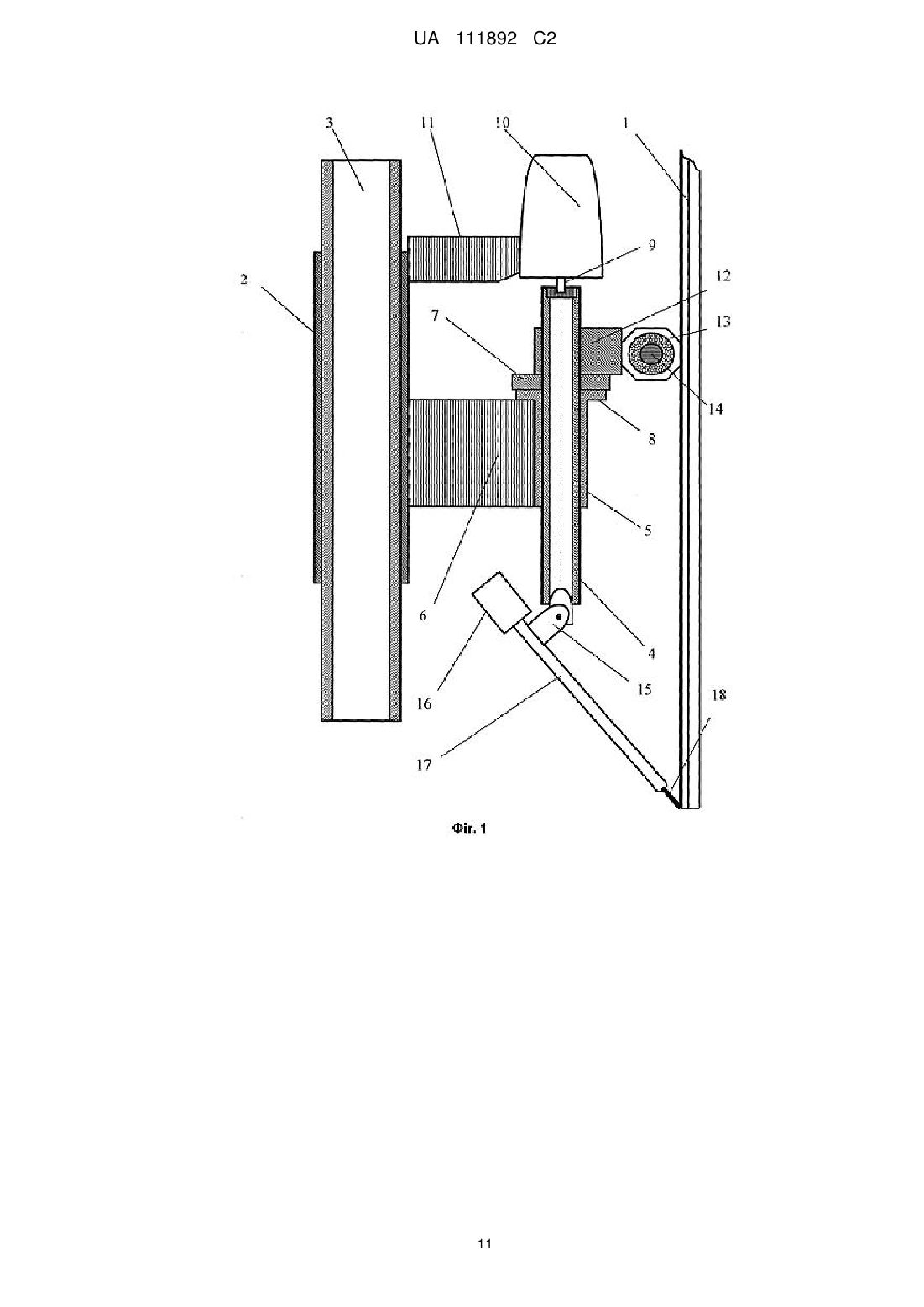
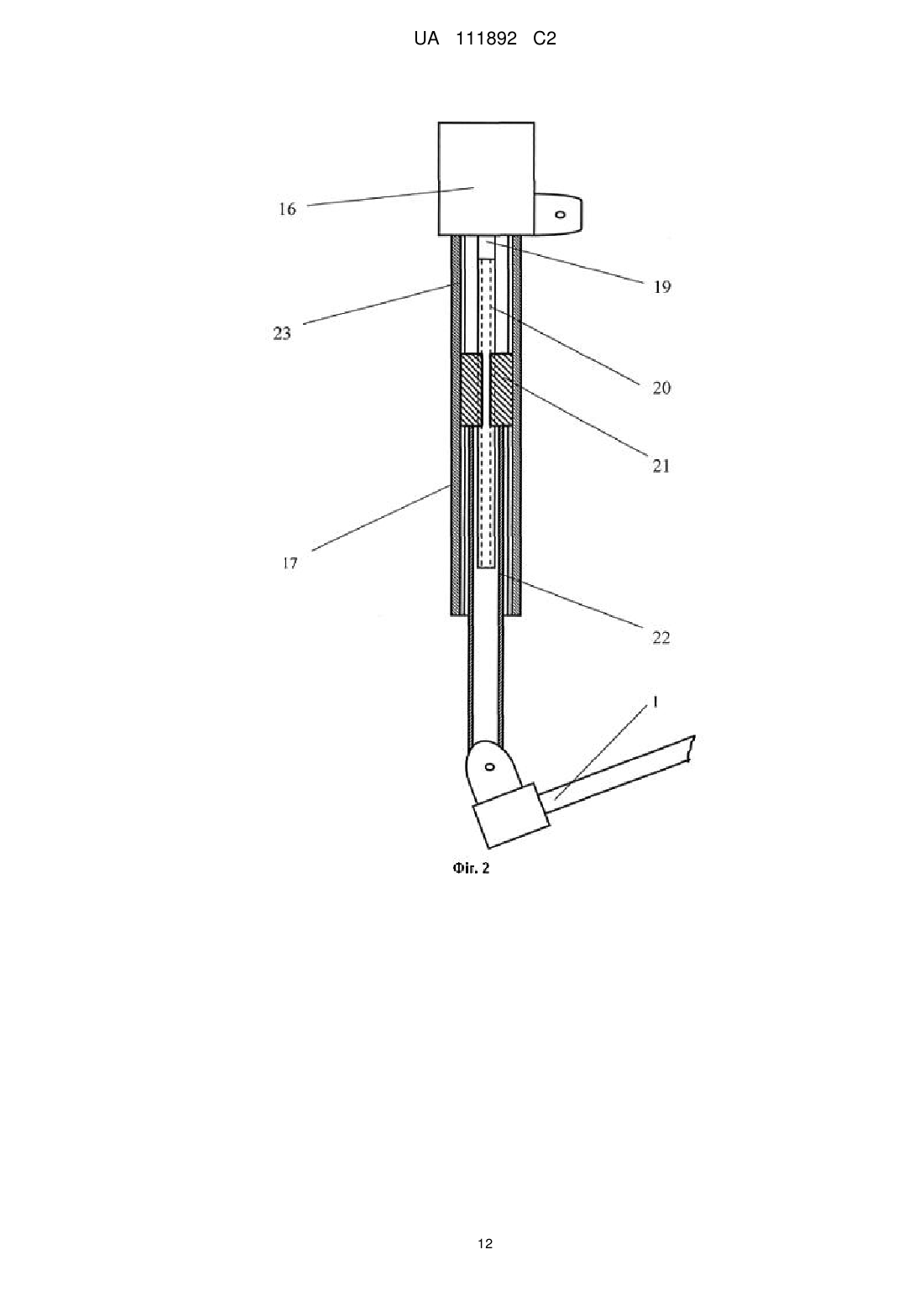
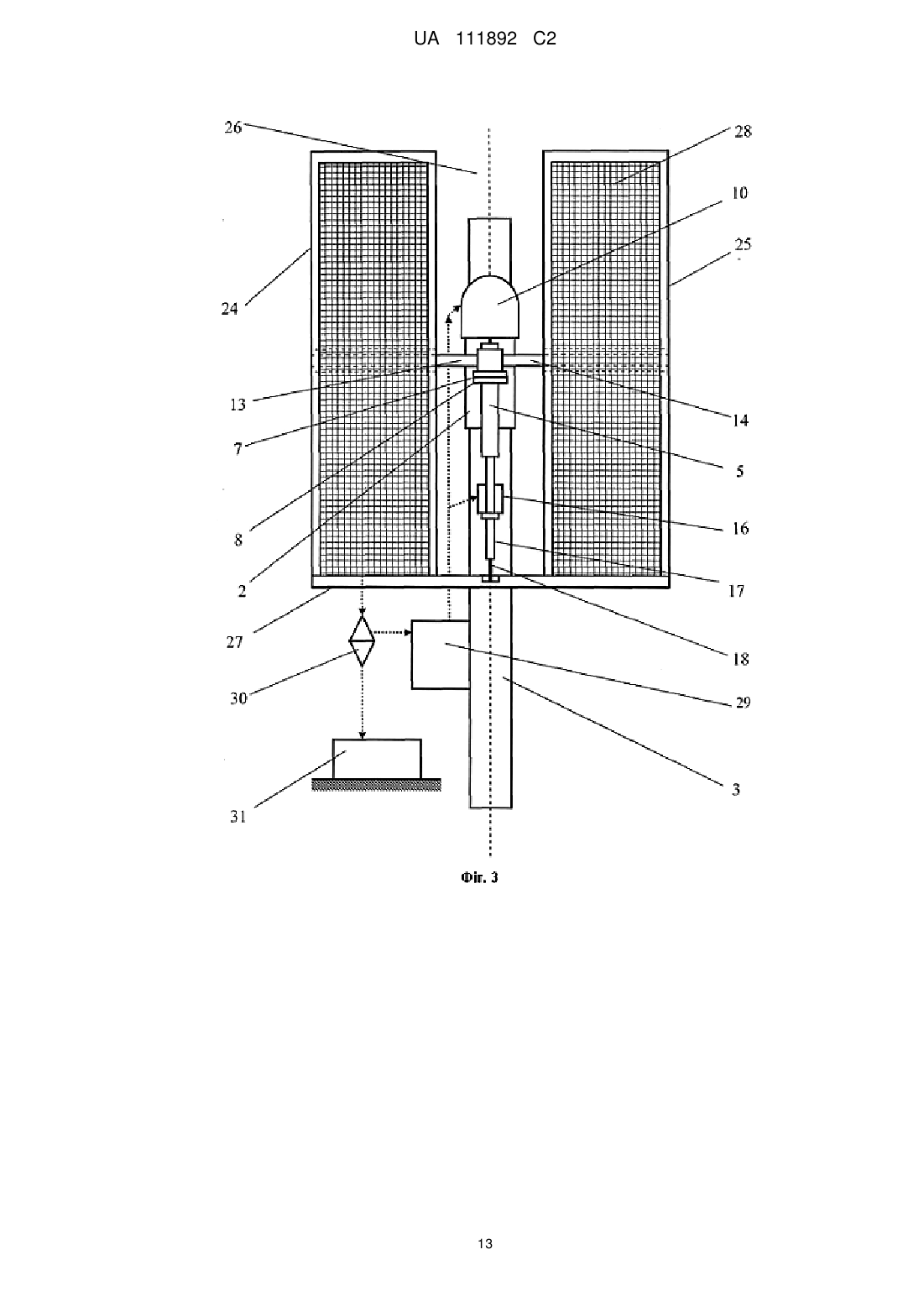
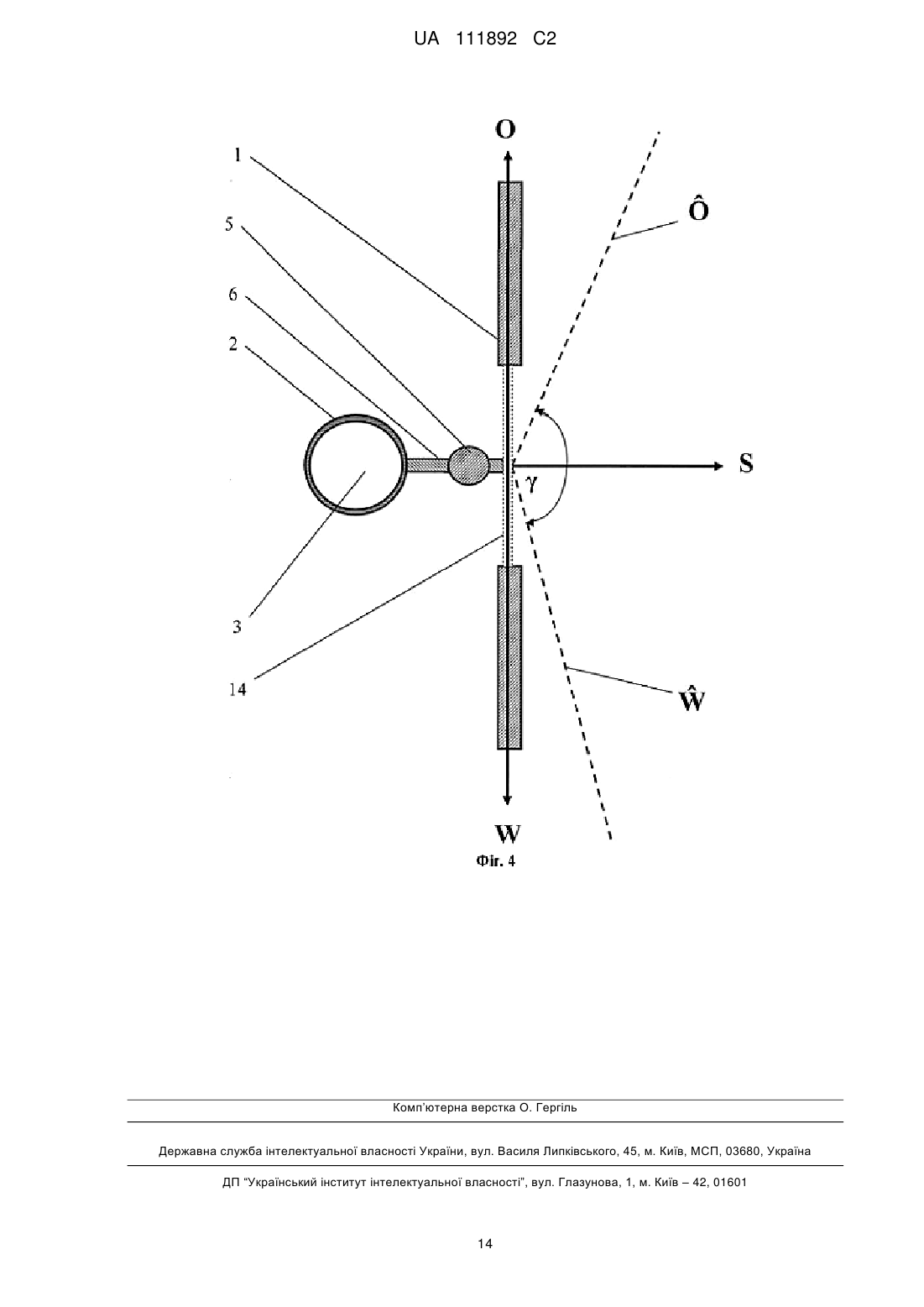
Реферат: Система орієнтації сонячного модуля, що містить опору, кінематичну систему, що скомпонована із вузлів азимутального та зенітального повороту, а також сонячний модуль, пристрій обробки сигналу і таймер. В ролі опори для монтажу сонячного модуля використовується об'єкт господарського чи житлового призначення, на яких модуль встановлюють за допомогою змінного вузла кріплення. Кінематична система має силовим центром опорний вузол, що містить трубчастий шток з вертикальною віссю обертання, який вставлений з можливістю обертання в нерухому втулку, яка жорстко закріплена за допомогою платика на муфті вузла кріплення. Шток виступає вільними кінцями за межі втулки, при цьому верхній виступ його оснащений фланцем, що ковзає по круговій полиці втулки і запобігає вертикальному зсуву штока, торець верхнього виступу з'єднаний карданною передачею з валом двигуна постійного струму, який жорстко зчеплений з вузлом кріплення за допомогою кронштейна та разом з підвіскою модуля і штоком є вузлом азимутального повороту. До UA 111892 C2 (12) UA 111892 C2 нижнього виступу штока шарнірно прикріплений вузол зенітального повороту, який являє собою кінематичну пару і містить незалежний приводний двигун постійного струму, вал якого жорстко з'єднаний з гвинтом, який входить при обертанні в гайку, що переміщує стрижень штовхача. Виступаючий кінець стрижня шарнірно з'єднаний з центром нижньої рейки консолі модуля. Консоль є площинною конструкцією, на якій монтуються фотоелектричні комірки модуля, і виконана у вигляді рами, що складається з декількох рознесених з отворами стулок, зашитих неметалевими фільонками і встановлених в одній площині, причому центральний збільшений отвір служить для вільного проходу вузлів кінематичної системи у всіх фазах нахилу консолі. Стулки з'єднані між собою за допомогою вала, закріпленого на середині висоти рами, і нижньої рейки. Рама з'єднана зі штоком вузла азимутального повороту за допомогою манжети, жорстко пов'язаної з горизонтальною муфтою, а з штовхачем вузла зенітального повороту вона з'єднана за допомогою шарніра. UA 111892 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до геліотехніки, а саме до області прямого перетворення сонячної енергії в електричну, і може бути використаний в фотоелектричних установках, що виробляють енергію як для індивідуального, так і для корпоративного автономного електропостачання. Тактика перетворення природної енергії (вітрової, променистої, теплової) в електричну стала важливою частиною політики рентабельності альтернативної енергетики. Прикладом можуть служити давно прийняті в практиці методики локальних буферних "підвісок" в розумних енергомережах (Смарт Грід), що покривають провали та амортизують піки генерації енергії. Характерно, що в цьому секторі енерговиробництва основних причин нестійкості постачання дві: нерівномірність споживання енергії і нерівномірність її надходження. Однак, тактичний ресурсний компонент цих процесів недостатньо розроблений в своїй багатій конкретиці та специфіці. Досить широка проблематика відкривається в навігаційних задачах. В даний час йде активна розробка поворотних опор (трекерів) для динамічної орієнтації сонячних панелей (модулів) на джерела променевої енергії, що рухається по складній і щодня трохи іншій траєкторії щодо площини модулів. Значущому врахуванню при розробці цих пристроїв підлягають не тільки нестійкі в добовому вимірі параметри метеоумов. Необхідно брати до уваги і той факт, що здатність до засвоєння потенціалу енергонакопичувальними пристроями (в основному, електрохімічними акумуляторами) обмежена мінімальним значенням вхідного імпульсу. Тому повертати всю масу модулів за частково екранованим або закритим хмарністю сонцем нерентабельно. Недостатньо уваги приділяється також проблемі негативної залежності світлоприймання від зміни оптичної прозорості захисного покриття модулів, яка обумовлена як запиленням, так і атмосферними опадами, а також утворенням крижаних плівок та інею. Досконалість сонячних енергоустановок залежить і від вдалого вирішення сукупності менш гострих проблем: міцнісних, аеродинамічних, а також специфічних вимог, продиктованих кліматичними особливостями місць їх експлуатації. Існують технічні рішення, в яких зазначені проблеми роздільно або комплексно виведені з тупикового стану. Так, відомий пристрій для захисту геліоустановки від атмосферних впливів за патентом РФ 5 1614606, МКВ F24J 2/42, автор Беляев Юрій Михайлович, заявник Науково-виробничий колектив "Сатурн", заявка № 4602371/06, пріоритет від 29.09.1988, опубл. 15.11.1994. Мета винаходу -підвищення експлуатаційної надійності. Пристрій для захисту геліоустановки від атмосферних впливів містить розташовану на її світлоприймальній панелі оптично прозору плівку, закріплену на ній за допомогою блоків з можливістю послідовної зміни робочих ділянок. Плівка виконана "нескінченною" з охопленням і має поперечні потовщення лінзоподібної форми. Під дією ваги снігу, яка діє на потовщення, плівка переміщається, і з її нижніх ділянок під дією тепла і вібрацій сніг зсипається залишаючи поверхню чистою та прозорою. До недоліків аналога слід віднести те, що сама плівка піддається іншим видам забруднень (пиловим, в основному), тому її прозорість з часом погіршується і істотна частина світлової енергії або відбивається, або поглинається самої плівкою. Це знижує продуктивність геліоустановки. Відома також сонячна електростанція за патентом РФ 2280918, МПК H01L31/042 (2006.01); F24J2/54 (2006.01), автори Прокопов O.I. і Ярмухаметов У.Р., патентовласник: Башкирський державний аграрний університет (БДАУ), заявка № 2005112032/28, пріоритет від 21.04.2005. Винахід стосується сонячних електростанцій для перетворення сонячної променевої енергії в електричну. Суть: сонячна електростанція включає в себе вертикальний вал з приводом азимутального повороту, на якому закріплена фотобатарея, оснащена системою автоматики зенітального приводу. Із протилежного боку встановлена система автоматичного розвороту електростанції з заходу на схід. При цьому сонячна фотобатарея розділена на дві рівні частини вертикальною перегородкою. Електрична комутація виконана так, що обидві частини включені зустрічно на обмотку малострумового реле автоматики приводу розвороту електростанції. Технічний результат винаходу полягає у спрощенні конструкції і зниженні її металоємності, а також у підвищенні надійності та зниженні вартості. Перетворення сонячної енергії в електричну можливо як в сонячну погоду, так і в похмуру. До недоліків пристрою можна віднести завищені енерговитрати на розвороти фотобатареї за сонцем і неможливість раціонального реагування на складні метеорологічні ситуації. Відомий також пристрій для перетворення сонячного випромінювання в електричну енергію за ЕР 1313151, H01L 31/042/ Device for converting solar radiation into elektric pover/ Mattiuzzo Gilberto (IT). - 21.05.2003, що містить вертикально встановлений на розпірках з можливістю повороту стовп, в торцевій частині якого встановлена жорстко закріплена металева конструкція, переважно прямокутної форми, площина якої збігається з площиною землі. На зазначеній 1 UA 111892 C2 5 10 15 20 25 30 35 40 45 50 55 60 конструкції розміщено безліч фотоелектричних модулів, електрично пов'язаних між собою, в загальному випадку - довільно орієнтованих на сонце. Для оптимізації поточного положення модулів щодо сонця стовп безперервно повертають навколо вертикальної осі за стандартною програмою. Для цього використовується поворотний пристрій. До недоліків пристрою слід віднести надлишково високі енерговитрати на зміну положення металевої конструкції, а також велику сумарну парусність масиву модулів, внаслідок чого довжина стовпа лімітована прогресивно зростаючим моментом навантаження, який може заважати рухливості поворотного пристрою. Найбільш близьким технічним рішенням, прийнятим як прототип, є поворотний пристрій для сонячного енергомодуля за патентом РФ 2381426 МПК F24J 2/54 (2006.01), автори Вусатий А.І. та ін., патентовласник: Відкрите акціонерне товариство Завод "Червоний Прапор" м. Рязань, заявка № 2007139419/06, пріоритет від 25.10.2007, опубл. 10.02.2010р. У конструкцію поворотного пристрою введено датчик освітленості, пристрій обробки сигналу та електронний таймер. Датчик освітленості включає в себе два фотодіода, закріплених на несучій пластині, яка встановлена на рухомій рамі паралельно площині сонячної батареї, а також відбивач, що являє собою пластину з білою матовою поверхнею, встановлену паралельно осі обертання батареї і перпендикулярно її площині таким чином, щоб не потрапляти в тінь батареї при будь-якому положенні сонця. Електронний таймер через задані проміжки часу видає пристрою обробки сигналу команду на вимірювання значень освітленості кожного з двох фотодіодів. При першому вимірі після включення живлення або в разі, коли знак різниці цих значень змінився порівняно з минулим виміром, пристрій обробки сигналу вимикає таймер і підключає напругу з виходу сонячної батареї до електродвигуна з метою повороту сонячної батареї в бік більш освітленого фотодіода до тих пір, поки не зміниться знак різниці значень освітленості фотодіодів. Після цього пристрій обробки сигналу вимикає електродвигун і включає таймер. Вертикальна опора пристрої кріпиться на фундаменті, а пристрій повороту по азимуту виконано у вигляді моторредуктора, вісь обертання якого розташовується перпендикулярно куту місцевості. Пристрій повороту по азимуту складається з обертового гвинта і "хитається" гайки таким чином, що гвинт одним кінцем шарнірно закріплений на мотор-редукторі, а гайка - на нерухомій опорі, причому вертикальна опора виконана шарнірно-складаний, з трубчастого стандартного профілю. Пристрій повороту по куту місцевості складається з хитного у вертикальній площині "водила" з дискретною установкою кута, закріпленого на горизонтальній осі щодо опори, і виконано у вигляді трубчастого корпусу з встановленим всередині мотор-редуктором із запобіжною муфтою. Вісь обертання мотор-редуктора розташовується перпендикулярно куту місцевості. До недоліків прототипу слід віднести ускладненість кінематичної схеми сонячної батареї, що має спільний привід для обох поворотних пристроїв, силову перевантаженість вала двигуна, на який спирається вся сонячна панель, недостатню захищеність від атмосферних опадів, а також небезпеку втрати орієнтації при спрацьовуванні пристрою повороту від помилкових джерел випромінювання. В основу запропонованого технічного рішення поставлена задача оптимізації режиму маневреності для зменшення енерговитрат на поворотні переміщення модулів, поліпшення масового та навантажувального балансування вузлів для безпечного розподілу механічних напружень по кінематичної підвісці модуля, автономізація приводів зенітального та азимутального вузлів, заміна системи стеження за сонцем програмними засобами орієнтації, поліпшення аеродинамічних якостей модуля. Поставлена задача вирішується тим, в ролі опори для монтажу сонячного модуля використовується об'єкт господарського чи житлового призначення, на яких модуль встановлюють за допомогою змінного вузла кріплення, кінематична система має силовим центром опорний вузол, що містить трубчастий шток, який вставлений з можливістю обертання в нерухому втулку, втулка жорстко закріплена за допомогою платика на муфті вузла кріплення, причому вісь обертання штока вертикальна і не змінює положення при будь-яких режимах роботи кінематичної системи, шток виступає вільними кінцями за межі втулки, при цьому верхній виступ його оснащений фланцем, що ковзає по круговій полиці втулки і запобігає вертикальному зсуву штока, торець верхнього виступу з'єднаний карданною передачею з валом двигуна постійного струму, який жорстко зчеплений з вузлом кріплення за допомогою кронштейна та разом з підвіскою модуля і штоком є вузлом азимутального повороту, до нижнього виступу штока шарнірно прикріплений вузол зенітального повороту, який являє собою кінематичну пару, і містить незалежний приводний двигун постійного струму, вал якого жорстко з'єднаний з гвинтом, який входить при обертанні в гайку, що переміщує стрижень штовхача, весь вузол змонтований всередині патрона, відкритого з боку, протилежного двигуну, для виходу стрижня штовхача, виступаючий кінець стрижня шарнірно з'єднаний з центром нижньої 2 UA 111892 C2 5 10 15 20 25 30 35 40 45 50 55 60 рейки консолі модуля, консоль є площинною конструкцією, на якій монтуються фотоелектричні комірки модуля, і виконана у вигляді рами, що складається з декількох рознесених з отворами стулок, зашитих неметалевими фільонками і встановлених в одній площині, причому центральний збільшений отвір служить для вільного проходу вузлів кінематичної системи у всіх фазах нахилу консолі, стулки з'єднані між собою за допомогою горизонтального імпоста, виконаного у вигляді вала, закріпленого на середині висоти рами, і нижньої рейки, рама з'єднана зі штоком вузла азимутального повороту за допомогою манжети, жорстко пов'язаної з горизонтальною муфтою, через яку пропущений імпост, а з штовхачем вузла зенітального повороту вона з'єднана за допомогою шарніра, пристрій для обробки сигналу виконано у вигляді вузла управління з мікропроцесором, що працює за багатопараметричною програмою річної проводки модуля, яка реалізує поточний циклічний добовий сценарій повороту модуля, з прив'язками до широтних і річних циклів, відступи від штатної програми проводяться у вигляді вставних епізодів, зміст яких полягає у виведенні площини модуля в пасивне, вертикальне, положення при падінні освітленості нижче критичного значення, причому після відновлення рентабельного рівня освітленості модуль повертається в робочу позицію, відповідну поточному часу, і програма продовжує виконуватися з пропуском часу відстою, а інформацію про ступінь освітленості отримують шляхом вимірювання величини струму в контурі видачі потужності і передають в блок управління, таймер включений у вигляді додатку в програму добової проводки модуля, при цьому корекція орієнтації модуля виконується дискретно, для чого вузол азимутального повороту через кожні 100 хвилин повертає модуль на 20-25° за сонцем - 9 разів за літній сонячний день, а вузол зенітального повороту змінює кут нахилу 3 рази за світловий день, вранці з 90° до 25°, опівдні з 25° до 50°, ввечері з 50° до 25°. Розкриємо сутність модернізації через порівняльний аналіз відмінних ознак, які характеризують запропоноване технічне рішення і відрізняють його від прототипу. Відмінна ознака "в ролі опори для установки сонячного модуля використовується будь-який об'єкт господарського чи житлового призначення, вузол кріплення варіативний і може бути виконаний, залежно від виду опорного об'єкта, у вигляді струбцини, фланця, муфти або кронштейна" вказує на можливість зменшення капітальних витрат за рахунок необов'язковості будівництва спеціальної опори. На відміну від відомих сонячних установок опора пристрою, що патентується, не є строго регламентованим вузлом. Сонячний модуль може бути встановлений і так, як зазначено в конкретному заявленому варіанті, тобто на трубчастому стовпі електроосвітлення території заводу. Крім того, допускається його монтаж допускається на будь-якому готовому об'єкті - на площинах стін і дахів заводських корпусів, на опорах внутрішніх ліній електропередачі і т. і. Для цього установка комплектується кріпильними елементами двох типів: муфтами різних діаметрів, а також консолями різної довжини виносу. Така універсалізація системи кріплення підвищує її функціональність. Крім того, ця установка, маюча технічні засоби кріплення на різноманітних опорах та об'єктах може використовуватися в складі енергетичних агрегатів промислових енергопарків. Пристосування вже існуючих об'єктів під опорні площини сонячних модулів, підвищує експлуатаційну маневреність таких енергосистем, оскільки на одному об'єкті може бути встановлено велика кількість модулів, які не заважають один одному у відношенні світлоприймання і, на додачу, допускають швидкі монтажні перегрупування і переноси при перебудовах корпусів і службових будівель. Особливо це стосується насичення сонячними джерелами енергії території промислових комплексів, виробничі корпуси та допоміжні конструкції яких мають масу вільних поверхонь. Крім того, ресурси механічної міцності і стійкості об'єктів (наприклад, будівель або стовпів електропередачі) експлуатуються без значних збитків. Таким чином, геліокомпоненти промислових енергопарків здешевлюються. Відмінна ознака "кінематична система має силовим центром опорний вузол, що містить трубчастий шток, який вставлений з можливістю обертання в нерухому втулку, вісь обертання штока встановлена вертикально і не змінює положення при будь-яких режимах роботи кінематичної системи, причому він з'єднує вузол азимутального повороту, оснащений незалежним двигуном постійного струму, з вузлом зенітального повороту, який має свій окремий приводний двигун" є дуже важливою ознакою, яка характеризує всю принципову базу трекерів нового покоління. Часто при конструюванні геліоустановок не беруть до уваги, що, по-перше, панель є досить масивним пристроєм і моменти гравітаційних навантажень повинні бути збалансовані, а подруге, що вони мають досить велику площу і виникаюча парусність повинна бути скомпенсована в рухливих вузлах, які одночасно служать і вузлами підвіски. Тому в пристрої, що патентується, проведене ретельне опрацювання залежності ефективності і рентабельності навігації від компонування приводу, і в підсумку - від принципу кріплення панелі до кінематичних 3 UA 111892 C2 5 10 15 20 25 30 35 40 45 50 55 вузлів. В результаті кінематичні схеми прототипу і заявлюваного пристрою мають різну архітектуру. Принцип організації основних елементів системи орієнтації (кінематичного і опорного блоків) полягає в наступному. В опорній структурі прототипу гравітаційні моменти збалансовані недостатньо, при цьому проекція сили тяжіння лягає на вал двигуна, оскільки на нього безпосередньо навішений модуль, який до того ж перебуває під кутом до вертикалі. Дляорієнтування додамо, що стандартна сонячна панель з габаритами 1580×808×35 мм важить 15 кг. Більше того навантаження з боку вітрового тиску на панель, що передаються на вал, мають хаотичний змінний характер. У такій компоновці моменти бічних навантажень можуть привести до деформацій або перекосів вала, що ускладнить роботу приводу. У пристрої, що заявляється, двигун нерухомо укріплений на опорі і передає крутильний момент на шток, який, у свою чергу, ходить у втулці, також жорстко закріпленої на зовнішній опорі. Цим прийомом усувається небезпека деформацій вала двигуна, що несе при цьому тільки тягові навантаження. Міцність штока, його пружність і габарити можуть бути незалежно пригнані під конкретний список вимог, важливий саме для конкретного пристрою, в якому він функціонально об'єднує всю кінематичну систему. Шток, на відміну від вала двигуна, може бути спроектований з урахуванням дії всіх видів навантажень. А двигун при цьому може бути один і той же. Таким чином, в патентованій системі орієнтації з'являється можливість укрупнювати габарити модуля без підвищення потужності двигунів, а тільки збільшуючи міцність опорного вузла кінематичної системи. У прототипі привід здійснюється від одного двигуна на два вузли. Тому в ньому неможлива роздільна корекція зенітального і азимутального положення модуля. У пристрої, що заявляється, на кожному поворотному пристрої встановлений незалежний двигун. За умовами зміни освітленості і в результаті застосування дискретного режиму виведення модулів на сонце, двигун зенітального пристрою вмикається у 4 рази рідше, ніж азимутального. І те й інше веде до економії енергії. І крім того, незалежне переміщення зенітального пристрою дає можливість виводити консоль модуля в пасивне (вертикальне) положення в будь-який момент при настанні несприятливої для світлоприймання погодної ситуації, залишаючи азимутальну орієнтацію без зміни. Цей режим роботи можна охарактеризувати як пасивний. Відмінна ознака "консоль є площинною конструкцією, на якій монтуються фотоелектричні комірки модуля, і виконана у вигляді рами, що складається з декількох стулок, з'єднаних між собою за допомогою вала, закріпленого на середині висоти". Рама фактично підвішена у двох точках, на деталях кінематичної системи, що дозволяє одним прийомом вирішити проблему підвищення аеродинамічних параметрів модуля і вагового балансування його вузлів, а також захисту від забруднення світлоприймальної поверхні його панелей. Серйозною перевагою пристрою, що патентується, є те, що панель модуля розбита на кілька вузьких частин (у прикладі конкретного виконання - на дві частини), сумарна площа яких дорівнює запланованій. Наявність отворів між вузькими панелями істотно змінює умови обтікання модуля повітряними потоками. Тиск швидкісного напору падає, що зменшує механічне навантаження на опору, а також на вузол кріплення і опорний вузол. Істотно важливою відмінністю патентованого модуля від прототипу є наявність в компоновці конструкції консолі горизонтального вала, закріпленого на середині висоти рами. Вал виконує основну функцію підвісу модуля, самого масивного вузла, який постійно змінює при роботі установки кут нахилу. Оскільки вал ділить модуль навпіл, то маси обох половин збалансовані і не створюють додаткових моментів навантаження на вузол зенітального повороту. А саме цей вузол найбільш чутливий до навантажень, оскільки його деталі (штовхач і шток) мають велику і мінливу в процесі корекції положення модуля довжину і кут нахилу. Ще одним важливим експлуатаційним аспектом є оптична чистота поверхні панелі. Нахил по куту місцевості (як вихідний, так і в усі наступні робочі моменти) в прототипі є несприятливим з точки зору забезпечення чистоти поверхні комірок фотоелектричних перетворювачів. В робочому діапазоні нахилу на площину панелі потрапляє пил і тверді атмосферні опади, які добре утримуються панеллю, нахиленою до горизонталі під гострим кутом. Оцінимо роль різних факторів, що негативно впливають на оптичні якості покриття модулів. Теплі дощі не становлять небезпеки. Однак, холодні дощі небезпечні протягом майже півроку, оскільки на Україні кліматичні умови характеризуються частими зимовими відлигами. Ці опади можуть бути причиною утворення крижаних шарів, які не тільки перекривають значну частину світлового потоку, але й можуть молекулярними напруженнями наносити механічні пошкодження панелі. Крім того, при великій товщині шару створюється серйозне силове навантаження на кінематичну систему. 4 UA 111892 C2 5 10 15 20 25 30 35 40 45 50 55 60 Сніг, особливо мокрий, небезпечний тими ж наслідками, що і обмерзання. Тільки він повністю екранує світловий потік, що надходить на панель, і може накопичуватися на площинах панелей у ще більших масах. Град небезпечний тільки з боку можливості ударних ушкоджень скляного покриття панелей. Всі перераховані атмосферні фактори мають максимальне негативну дію при горизонтальній орієнтації площин панелей. Воно зменшується пропорційно збільшенню кута нахилу панелі до горизонталі. І досягає мінімуму при вертикальному положенні панелі. Для панелей великої площі тяжкість крижаних шарів або сніжних наносів може призводити до порушень роботи кінематичних вузлів і навіть до їх поломок, оскільки розподіл навантаження нерівномірно розподілений по площі. Взимку модуль-прототип значний час знаходиться в несприятливому становищі, і вимагає обслуговування для відновлення оптичної прозорості комірок. У пристрої, що патентується, негативний вплив на роботу модуля істотно зменшується за рахунок введення в режим роботи, так званого пасивного положення, при якому модуль під час дії опадів, а також у нічний час встановлюється строго вертикально. Те, що при збільшенні кута нахилу до горизонталі збільшується парусність панелі і росте вітрове навантаження, в пристрої, що патентується, істотно компенсується поліпшенням аеродинамічних параметрів за рахунок розділення панелі на смуги. Крім того, оскільки міцність опорного вузла підвіски може необмежено збільшуватися в його конструктивній схемі, то він буде компенсувати додаткові навантаження, захищаючи від перевантажень приводи вузлів повороту. Все разом збільшує автономність пристрою, зводячи до мінімуму операції експлуатаційного обслуговування. Відмінна ознака "пристрій для обробки сигналу виконано у вигляді вузла управління з мікропроцесором, що працює за багатопараметричною програмою, а відступи від програми виконуються у вигляді актів виведення модуля у вертикальне положення при падінні освітленості нижче критичного значення" має суттєве значення для модернізації. Система орієнтації в пристрої-прототипі переміщує сонячну панель по оптимізованій траєкторії, при якій програма блока управління зав'язана на сигнали від диференціального датчика освітленості і здійснює переміщення сонячної батареї через рівні і довільно встановлені проміжки часу. Сонячні модулі ведуть за сонцем так, щоб в кожний момент на їх поверхню падало максимально можливу кількість променевої енергії. Така тактика вважається раціональною та ефективною. Однак, аналіз фізики процесу утилізації енергії в фотоперетворювачах показує, що це не зовсім так. По-перше, якщо засвітка активного шару проводиться без селективного фільтра, відсікаючого інфрачервоний діапазон спектра, то при збільшенні щільності падаючої енергії збільшується і теплова складова. Це веде до перегріву панелі і до падіння ККД перетворення. По-друге, надлишкова подача випромінювання інфрачервоного діапазону понад поріг засвоєння призводить до швидкої деградації фоточутливого шару і до зниження терміну служби панелі. Поєднання цих двох одночасно діючих факторів дає підстави для формулювання нової тактики навігації пристрою, набагато більш вмотивованої. Вона полягає в тому, що при потоках будь-якої інтенсивності панель повинна бути орієнтована таким чином, щоб освітленість панелі не зашкалювала за діапазон оптимального питомого розподілу енергії по її поверхні. Більш детальне розкриття формули показує, що в даному рішенні акценти взаємодії системи з середовищем перенесені з завдань навігації на завдання тонкого врахування метеоситуації. У пристрої, що патентується, переміщення панелі виконується шляхом перестановки послідовності кроків, які робляться пристроєм у відповідь на переважний характер метеоумов дня. Жорсткий ідеальний навігаційний сценарій виконаний у програмній оболонці, прошитої в мікросхемі. Від цього він стає стандартним і виконується без варіацій простим двокоординатним приводом, що не потребує інформації від системи датчиків. А всі реакції на несприятливі метеумови зводяться до однієї ключової процедури - маневру виведення панелі в універсальне пасивне положення. Пасивне положення модуля характеризується тим, що в даному випадку знайдений консенсус між двома спільно і постійно діючими негативними факторами, існуючими в сезонних станах атмосфери в Україні: опадами і вітром. Досить сильною відмінною ознакою патентованої системи є істотне збільшення, порівняно з прототипом, використання програмних можливостей системи управління, яким замінено пристрій для обробки сигналів. Програма фактично самостійно (без участі складної системи датчиків освітленості, позиції, а також лічильника обертів двигуна і календарної сітки) здійснює 5 UA 111892 C2 5 10 15 20 25 30 35 40 45 50 55 60 проводку панелі по траєкторії, залежній від всіх перерахованих параметрів, але вже врахованих у програмному наповненні мікропроцесора. При цьому майже повністю втрачається процедура автокорегування, властивість, що високо цінувалося в часи слабкого розвитку електронної техніки. В даний час передача складних процедур навігації автономній системі управління в такій мірі спрощує конструкцію установки і систему збору інформації для азимутального і зенітального стеження, що модернізації підлягає більшою мірою сама тактика проводки панелей, ніж структура домінуючих вузлів. При такому підході функція управління орієнтацією, яка була довгий час слабким місцем фотоелектричних станцій, стає у значній мірі рутинною (автоматизованою) стороною проблеми забезпечення роботи кожної установки. Цей новий підхід наближає політику сонячної енергетики до виду прогнозованих тенденцій її розвитку. Відомі фотоелектричні станції змушували свої системи орієнтації функціонувати навіть тоді, коли рівень освітленості активних площин не давав рентабельною видачі товарної енергії (малоамплітудні струми не сприймаються акумуляторами). Крім того, вони, як правило, були обладнані вузлами, які працювали на інших п'єзо-термо-гідрофізичних ефектах, негативні сторони та функціональні недоліки яких підсумовувалися з вадами основного принципу. У патентованій системі використовується тільки непрямий вимірювач освітленості (по вихідному струму). Кінематичні вузли при цих засобах і методах керування не модифікуються заради все більшого взаємного узгодження, а працюють майже незалежно, у своїх прямих елементарних режимах. А спрощена кінематика більш стабільна і надійна, що збільшує шанси цієї системи отримати довгострокову автономність з мінімумом обслуговування (тільки профілактика). Таймер включений у вигляді додатку в програму добової проводки модуля, при цьому корекція орієнтації модуля виконується дискретно через кожні 100 хвилин для азимутального стеження (9 разів за літній сонячний день) і всього 3 рази за світловий день для зенітального. Взимку кількість актів азимутальної корекції дорівнює п'яти доворотам, а зенітальних - двом. Поширені два способи навігації: оперативне стеження за сонцем (за допомогою лінзових систем) або рух всього масиву модулів за загальною програмою, алгоритм якої враховує точну траєкторію сонця в даний день. Для того, щоб оптимізувати роботу пристрою навігацію розбивають на три режими: а) дискретний, застосовуваний в ясну погоду; в) пасивний, застосовуваний у стійку хмарну погода (у тому числі з опадами сезонного типу); с) режим доорієнтаціі, застосовуваний при мінливій хмарності. Обгрунтування кожного режиму полягає в наступному. а) В обстановці безперервного опромінення активній панелі модуля застосовується дискретний режим орієнтації, який полягає в тому, що постійне переміщення панелі замінюється періодичним. Обсяг утилізованої сонячної енергії залежить від кута падіння променів на поверхню, оскільки при цьому змінюється коефіцієнт відбиття променевого потоку. Однак, цей параметр має практично вигідний "люфт", оскільки для скляного покриття кремнієвих пластин при відхиленні кута падіння від нормалі до його поверхні до 30° коефіцієнт відбиття збільшується не більше ніж на 5 %. Ще більш обсяг утилізації енергії залежить від ефективної площі панелі, тобто від перекривається нею перерізу потоку випромінювання. Вона дорівнює реальної площі панелі, помноженої на синус кута між її площиною і напрямком потоку. Тому, якщо панель перпендикулярна потоку, її ефективна площа дорівнює її реальної площі, якщо потік відхилився від перпендикуляра на 60° - половині реальної площі, а якщо потік паралельний панелі, її ефективна площа дорівнює нулю. При відхиленні від нормалі на 25° ефективна площа панелі залишається досить великою, і становить не менше 90 % від її реальної площі. Таким чином, для цих найважливіших факторів існує досить великий кутовий запас (25-30°) за показником точності орієнтації. Тобто параметр точності лежить не в точці, а в діапазоні. Врахування цих чинників дає обґрунтований привід і технічну можливість зміни характеру ключової функції системи навігації. Конкретно - перехід від безперервного проходження модуля за сонцем до дискретного. У технічному виконанні - до переходу від безперервної роботи двигунів до періодичного. Так, дискретне переміщення панелі з кроком у 20°-25° дає більш економічний режим, оскільки втрати енергії в двигуні залежать від часу його роботи в набагато більшому ступені, ніж від швидкості повороту системи. У аналогу враховані тільки обмеження, що накладаються на величину діапазону відбивною здатністю покриття панелей, але не врахована залежність від ефективної площі панелі, що дає похибки в програмі переміщення. Розрахунки показують, що проміжок (параметричний зазор) між циклами спрацьовування двигуна азимутальної системи корекції в перекладі кутового виміру в часовий може досягати 1 г. 40 хв. Тривалість самого акту корекції може бути зменшена до 2-3 хвилин. Корекція положення 6 UA 111892 C2 5 10 15 20 25 30 35 40 45 50 55 панельного вузла здійснюється програмою управління, яка виконується дискретно через кожні 100 хвилин для азимутального стеження (9-12 разів за літній сонячний день) і всього 3 рази за світловий день для зенітального. У прототипі теж застосований метод дискретної корекції, але проміжки між включеннями двигуна залежать від показань датчика освітленості. Але датчик не розрізняє з яких причин зменшився світловий потік: внаслідок неузгодженості положення сонця і орієнтації панелі або внаслідок погіршення погоди. Тому екранування сонця хмарами може інтерпретуватися системою стеження як сигнал до марного пошуку робочого положення, тобто призводить до безперервної роботі двигуна. Розповсюджені способи модернізації систем стеження зводяться до збільшення чутливості фотоелементів (вимірників світлового потоку). Однак це поліпшення дає і негативний результат - небезпеку реагування системи на помилкові джерела випромінювання типу підсвічування з боку відбиваючих поверхонь навколишніх будов (наприклад, вікон, вітражів, дахів, тощо), а також відблисків з боку проїжджаючих транспортних засобів. Концентрація таких завал особливо велика на територіях промислових об'єктів, до складу енергопарка яких може входити сонячна установка. Крім того, проміжки між актами запиту даних пристроєм для обробки сигналу від датчика вибрані абсолютно довільно, не обґрунтовані і ніяк не пов'язані з конкретними фізичними параметрами умов світлоприймання. У патентованій установці модуль повертається системою орієнтації в темпі, що має конкретні оптимізовані характеристики. На змінну або тимчасову хмарність, система орієнтації пристрою, що патентується, реагує тільки переводом модуля в пасивне положення. Робота ж вузла азимутального повороту при цьому не змінюється. Для реалізації цього режиму в ланцюзі вихідної напруги встановлений датчик по струму, який дає команду на зміну роботи системи навігації в тому випадку, якщо імпульси струму нижче порогового значення. Поточна орієнтація модуля не контролюється детально зворотним зв'язком, а змінюється тільки по програмі. Оскільки на практиці мінімальним рентабельним 2 рівнем освітленості вважається 500 Вт/см , то за цим показником як по критичному пороговому значенню тарують вимірювач струму. При появі сонця в ланцюзі видачі потужності з'являється струм. Сигнал від вимірювача подається в блок управління, який включає привід вузла зенітального повороту і виводить модуль з пасивного стану. При суцільний тривалій хмарності панель залишається в пасивному положенні, повертаючись, тим не менш, в дискретно режимі (через кожні 100 хвилин покою) в азимутному напрямку. Оскільки приводна система патентованого пристрою розбита на дві частини, то кожен двигун має істотно меншу потужність, ніж спільний універсальний двигун приводу прототипу. Таким чином, енерговитрати в режимі суцільної хмарності менше. А з урахуванням того, що двигун вузла зенітального повороту в цьому режимі не працює зовсім, то переваги модернізованої системи орієнтації стають ще більш переконливими. Всі три режими забезпечують таку проводку панелі, при якій витрати на роботу вузлів повороту мінімізуються. Переваги, отримані від повного переходу приводної системи на програмне управління без використання спеціальних систем стеження за положенням сонця, наступні. 1. Програмна проводка консолі по траєкторії орієнтації дає можливість скасувати складні та вразливі фотоелектричні вузли азимутального і зенітального повороту. 2. Відхиленням від елементарних операцій в даній схемі є лише процедура виведення панелі в універсальний пасивний режим. Підсумковим результатом цих перетворень є зниження експлуатаційних витрат, що покриває невелике зменшення утилізаційного рівня за рахунок виключення режимів низької продуктивності (розсіяне освітлення і змінна освітленість). 3. Гарантовано виключаються всі випадкові збої як в процесах тестування освітленості, так і в операціях порівняння сигналів від декількох фотоелементів. Вся траєкторія проводки модуля прописана в програмі і виконується для кожного дня строго відповідно з астрономічними циклами, тобто модуль рухається по змінному графіку. Пасивному режиму, введеному в якості нового в роботу патентованої системи орієнтації, притаманні наступні переваги. 1. При хмарності зменшуються витрати енергії на навігацію. 2. При опадах зводяться до мінімуму негативні наслідки їх дії. 3. Панелі приймають положення, що полегшують їх самоочищення та гігієнічне обслуговування. 4. Панель не дрейфує постійно у пошуках сонця. 5. При ясній погоді не наступає перегріву панелі. 7 UA 111892 C2 5 10 15 20 25 30 35 40 45 50 55 60 Пасивний режим є вставною частиною сценаріїв всіх інших режимів. У сонячну погоду він включається вночі, при мінливій хмарності - вночі та в фазах падіння освітленості, в хмарні дні вдень і вночі. Докази того, що цей режим є оптимальним при зупинці роботи комірок модуля з будь-яких причин викладені вище. Проведений порівняльний аналіз показує, система, що патентується має серйозні відмінні ознаки в порівнянні з прототипом, а сукупність ознак сприяє вирішенню поставленої у винаході задачі. За наявними у авторів відомостями запропонована сукупність відмінних ознак, що характеризують суть винаходу, не відома в даному розділі техніки. Запропоноване технічне рішення може бути використано при проектуванні фотоелектричних станцій, як автономних, так і таких, що входять до складу промислових енергосистем. Система орієнтації сонячного модуля (найбільш універсальний і переважний її варіант) містить основний вузол - фотоелектричний модуль і чотири функціональних вузла (підсистеми), що забезпечують ефективне відстеження сонця для збільшення рентабельності роботи модуля: вузол кріплення до зовнішніх опор, опорний вузол кінематичної системи, вузол азимутального повороту і вузол зенітального повороту модуля, а також електронний блок управління системою з мікропроцесором. Система патентованого пристрою ілюструється кресленнями, де на Фіг. 1 наведений профільний переріз пристрою, на Фіг. 2 - вузол зенітального повороту, на Фіг. 3 - модуль з вузлами обслуговування, на Фіг. 4 - схема базової орієнтації модуля. Модуль 1 (Фіг. 1) через вузли кінематичної системи встановлений на опорі за допомогою змінного вузла 2 кріплення. Вузол 2 варіативний і може бути виконаний (залежно від виду опорного об'єкта) у вигляді струбцини, фланця, муфти або кронштейна. Оскільки розроблений трекер в конкретному виконанні закріплений на стовпі 3 освітлювача території підприємства, то вузол кріплення 2 виконаний у вигляді муфти. Кінематична система має центром динамічний опорний вузол, що містить трубчастий шток 4, який вставлений з можливістю обертання в нерухому втулку 5. Втулка 5 жорстко закріплена за допомогою платика 6 на муфті 2 вузла кріплення, що охоплює опору 3, причому вісь обертання штока 4 встановлена вертикально і не змінює кутового нахилу при будь-яких режимах роботи кінематичної системи. Шток 4 виступає вільними кінцями за межі втулки 5, при цьому верхній виступ його оснащений фланцем 7, який ковзає по полиці 8 втулки і запобігає вертикальному зміщенню штока. Торець верхнього виступу з'єднаний карданною передачею з валом 9 двигуна 10 постійного струму, який жорстко встановлений на муфті 2 за допомогою кронштейну 11 і разом з підвіскою модуля 1 і штоком 4 є вузлом азимутального повороту трекера. До верхнього виступу штока 4 прикріплений також модуль 1. Вузол кріплення модуля містить манжету 12, яка охоплює шток 4, горизонтальну муфту 13, через яку пропущений вал 14. До нижнього виступу штока 4 через шарнірне з'єднання 15 кріпиться вузол зенітального повороту, який в конкретному виконанні являє собою кінематичну пару 5-го класу (з одним ступенем свободи), і містить незалежний приводний двигун 16 постійного струму, патрон 17 і штовхач 18. Детальний устрій цього вузла наведено на Фіг. 2. Вал 19 жорстко з'єднаний з гвинтом 20, який входить при обертанні в гайку 21 і переміщує стрижень штовхача 22. Весь вузол змонтований всередині патрона 17, жорстко закріпленого на кожусі двигуна 16 і відкритого з боку, протилежного двигуну для виходу стрижня штовхача 22. Гайка 21 оснащена поздовжніми шипами, які дають їй можливість без обертання зміщуватися по поздовжнім напрямним канавкам 23 всередині патрона 17. Виступаючий кінець стрижня штовхача 22 шарнірно з'єднаний з модулем 1. Прийомом розміщення незалежних підсистем азимутального і зенітального повороту на одній спільній опорі - штоку 4, досягається максимальна компактність системи без втрати функціональності. Модуль складається з консолі (Фіг. 3), яка виконана у вигляді рами, що складається з двох рознесених стулок 24 і 25, зашитих неметалевими фільонками (не показані) і встановлених в одній площині через отвір 26 для проходу вузлів кінематичної системи в робочих (близьких до горизонтальних) фазах нахилу площини модуля. Стулки 24 і 25 з'єднані між собою за допомогою горизонтального імпоста, виконаного у вигляді валу 14, закріпленого точно на середині висоти рами, і нижньої рейки 27. Консоль, обидві стулки рами якої заповнені скомутованими фотоелектричними комірками 28, являє собою систему спарених сонячних панелей. Вузол керування 29 виконаний у вигляді електронного пристрою для обробки інформації з мікропроцесором, що працює за розробленою програмою. Комірки 28 з'єднані в спільний контур, на виході якого встановлений датчик 30 струму, а навантаженням служить акумуляторна батарея 31. 8 UA 111892 C2 5 10 15 20 25 30 35 40 45 50 55 Описана система працює наступним чином. Сонячний модуль 1 встановлюють на будь-якому готовому спорудженні, використовуючи для цього один зі змінних вузлів 2 кріплення. На прикладі конкретного виконання для установки на мережевому стовпі електропередачі застосована затяжна муфта. При монтажі проводиться первинна одноразова орієнтація пристрою. Для прив'язки до змінного азимутального робочого кута у (розмір якого лежить між точками сходу і заходу сонця) муфту 2 фіксують так (Фіг.4), що площина платика 6 орієнтується на південь (S), при цьому площина модуля лежить по лінії O-W (схід-захід). Це забезпечує приблизно однакове відхилення консолі в крайні положення Ô та Ŵ при повному азимутальному розвороті. Після цього в настройках вузла керування 29 задається місяць, число і поточний час запуску установки. Програма річної проводки в штатному режимі встановлює початок циклічної навігації (орієнтування модуля на сонце) і запускає виконання послідовності маневрених характеристик. Спосіб навігації розбитий на три режими: дискретний, застосовуваний в ясну погоду; режим доорієнтації, застосовуваний при мінливій хмарності і пасивний, застосовуваний у хмарну погода (у тому числі з опадами сезонного типу) та вночі. Дискретний режим є штатним режимом, при якому, починаючи зі сходу сонця, модуль 1 змінює своє положення при посередництві роботи вузлів азимутального і зенітального повороту. Всю ніч модуль знаходиться у вертикальному положенні (в пасивному режимі) незалежно від погоди. При сході сонця по команді від блока управління він виставляється на сонце по азимуту О. Для цього включається двигун 10 вузла азимутального повороту, який повертає шток 4 на необхідний кут. Разом зі штоком повертається модуль. Потім модуль виводять з пасивного положення за допомогою вузла зенітального повороту. Для цього по сигналу від блока управління включається двигун 16, який через штовхач 18 зрушує нижню рейку 27 рами модуля. При цьому змінюється кут нахилу модуля до горизонталі і встановлюється оптимальний для даного часу доби кут падіння світлового потоку на площини комірок 28. Починається світлоприймання і вироблення електроенергії. Датчик струму 30 видає інформацію про рівень освітленості і по ній програмні засоби вузла управління 29 встановлюють тактику роботи системи орієнтації. Якщо величина струму перевершує граничне значення, відповідне мінімальній інтенсивності світлового потоку, то модуль залишається нерухомим протягом 100 хвилин, оскільки весь цей час кут падіння світлового потоку змінюється, але не виходить за межі оптимального діапазону. Після закінчення цього часу потік починає зменшуватися і спрацьовує двигун 10 азимутального повороту, який відновлює оптимальну орієнтацію модуля. Таких актів включення двигуна за літній світловий день проводиться не більше дев'яти, і кожен з них має тривалість не більше 2-3 хвилин. Решту часу модуль нерухомий. Таким чином, двигун 10 азимутального повороту працює за зміну не більше 23 хвилин (і це тільки в дні літнього сонцестояння). У зимовий період цей час скорочується до 15 хвилин. Природно, що час роботи двигуна зменшується в 4264 рази. Вузол зенітального повороту змінює нахил модуля 3-4 рази за зміну. І таким чином тривалість роботи його двигуна 16 ще менше (912 хвилин). При заході сонця модуль перекладається роботою двигуна 16 в пасивне положення. Вранці описаний цикл повторюється, але кожну добу програма вузла управління змінює параметри траєкторії проводки в повному узгодженню зі зміною тривалості дня і траєкторії сонця. Режим доорієнтації активується при мінливій хмарності. При такій метеообстановці освітленість панелей 24 та 25 модуля 1 можуть багаторазово протягом дня виходити з продуктивного діапазону. Розсіяне світло при екранування сонця суцільною хмарністю або хмарами, що дають опади, не генерує струму достатньої для зарядки акумуляторів 31 напруги. Тому за інформацією, отриманою в цих умовах від датчика струму 30, вузол зенітального повороту виводить модуль у вертикальне положення при будь якій поточній орієнтації. Надалі вузол азимутального повороту продовжує працювати в штатному дискретному режимі. Тому через кожні 100 хвилин проводиться звичайний черговий доворот модуля. Якщо хмарність припиняється і рівень освітленості панелей стає нормальним, то спрацьовує вузол зенітального повороту, виводячи панелі на максимальне світлоприймання. При наступному затіненні модуль знову переводиться в пасивне положення. Таким чином, відступи від програми проводяться у вигляді вставних епізодів, зміст яких завжди полягає у виведенні модуля в пасивне положення. Вночі модуль знаходиться в пасивному положенні. Все вищевикладене дає підстави для висновку про те, що система, що патентується, може служити ефективною альтернативою існуючим підходам вирішення проблеми створення рентабельної і відносно простої системи орієнтації фотоелектричного пристрою. 9 UA 111892 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 Система орієнтації сонячного модуля, що містить опору, кінематичну систему, що скомпонована із вузлів азимутального та зенітального повороту, а також сонячний модуль, пристрій обробки сигналу і таймер, яка відрізняється тим, що в ролі опори для монтажу сонячного модуля використовується об'єкт господарського чи житлового призначення, на яких модуль встановлюють за допомогою змінного вузла кріплення, кінематична система має силовим центром опорний вузол, що містить трубчастий шток, який вставлений з можливістю обертання в нерухому втулку, втулка жорстко закріплена за допомогою платика на муфті вузла кріплення, причому вісь обертання штока вертикальна і не змінює положення при будь-яких режимах роботи кінематичної системи, шток виступає вільними кінцями за межі втулки, при цьому верхній виступ його оснащений фланцем, що ковзає по круговій полиці втулки і запобігає вертикальному зсуву штока, торець верхнього виступу з'єднаний карданною передачею з валом двигуна постійного струму, який жорстко зчеплений з вузлом кріплення за допомогою кронштейна та разом з підвіскою модуля і штоком є вузлом азимутального повороту, до нижнього виступу штока шарнірно прикріплений вузол зенітального повороту, який являє собою кінематичну пару і містить незалежний приводний двигун постійного струму, вал якого жорстко з'єднаний з гвинтом, який входить при обертанні в гайку, що переміщує стрижень штовхача, весь вузол змонтований всередині патрона, відкритого з боку, протилежного двигуну, для виходу стрижня штовхача, виступаючий кінець стрижня шарнірно з'єднаний з центром нижньої рейки консолі модуля, консоль є площинною конструкцією, на якій монтуються фотоелектричні комірки модуля, і виконана у вигляді рами, що складається з декількох рознесених з отворами стулок, зашитих неметалевими фільонками і встановлених в одній площині, причому центральний збільшений отвір служить для вільного проходу вузлів кінематичної системи у всіх фазах нахилу консолі, стулки з'єднані між собою за допомогою горизонтального імпоста, виконаного у вигляді вала, закріпленого на середині висоти рами, і нижньої рейки, рама з'єднана зі штоком вузла азимутального повороту за допомогою манжети, жорстко пов'язаної з горизонтальною муфтою, через яку пропущений імпост, а з штовхачем вузла зенітального повороту вона з'єднана за допомогою шарніра, пристрій для обробки сигналу виконано у вигляді вузла управління з мікропроцесором, що працює за багатопараметричною програмою річної проводки модуля, яка реалізує поточний циклічний добовий сценарій повороту модуля, з прив'язками до широтних і річних циклів, відступи від штатної програми проводяться у вигляді вставних епізодів, зміст яких полягає у виведенні площини модуля в пасивне, вертикальне, положення при падінні освітленості нижче критичного значення, причому після відновлення рентабельного рівня освітленості модуль повертається в робочу позицію, відповідну поточному часу, і програма продовжує виконуватися з пропуском часу відстою, а інформацію про ступінь освітленості отримують шляхом вимірювання величини струму в контурі видачі потужності і передають в блок управління, таймер включений у вигляді додатку в програму добової проводки модуля, при цьому корекція орієнтації модуля виконується дискретно, для чого вузол азимутального повороту через кожні 100 хвилин повертає модуль на 20-25° за сонцем - 9 разів за літній сонячний день, а вузол зенітального повороту змінює кут нахилу 3 рази за світловий день, вранці з 90° до 25°, опівдні з 25° до 50°, ввечері з 50° до 25°. 10 UA 111892 C2 11 UA 111892 C2 12 UA 111892 C2 13 UA 111892 C2 Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 14
ДивитисяДодаткова інформація
Автори англійськоюDzenzerskyi Viktor Oleksandrovych, Tarasov Sergii Vasyliovych, Buriak Oleksandr Afanasiiovych
Автори російськоюДзензерский Виктор Александрович, Тарасов Сергей Васильевич, Буряк Александр Афанасьевич
МПК / Мітки
МПК: H02S 20/30, F24J 2/38, H01L 31/042, F24J 2/40, F24J 2/54
Мітки: модуля, сонячного, система, орієнтації
Код посилання
<a href="https://ua.patents.su/16-111892-sistema-oriehntaci-sonyachnogo-modulya.html" target="_blank" rel="follow" title="База патентів України">Система орієнтації сонячного модуля</a>
Спосіб зміни орієнтації робочої області радіотелефону і радіотелефон для його реалізації
Номер патенту: 46599
Опубліковано: 15.05.2002
Автор: Гнатенко Віталій Іванович
МПК: H04B 1/38
Мітки: робочої, області, радіотелефон, орієнтації, спосіб, реалізації, зміни, радіотелефону
Формула / Реферат:
1. Спосіб зміни орієнтації робочої області радіотелефону, у якому дисплей і модуль символьної клавіатури виконані у вигляді окремих елементів, що полягає в зміні напрямку «верх-низ» зображення на дисплеї радіотелефону, який відрізняється тим, що, поряд зі зміною напрямку «верх-низ» зображення на дисплеї радіотелефону, виконують поворот символів на клавішах символьної клавіатури радіотелефону так, що напрямки «верх-низ» зображення на дисплеї і...
Система керування роботою модуля нагріву
Номер патенту: 35458
Опубліковано: 25.09.2008
Автори: Семенюк Андрій Олександрович, Шевчук Микола Федорович
МПК: F24H 1/00
Мітки: нагріву, роботою, керування, система, модуля
Формула / Реферат:
1. Система керування роботою модуля нагріву, яка відрізняється тим, що містить електронний блок, який задає послідовність включення окремих нагрівальних елементів модуля та інтервал між їх включеннями у залежності від різниці заданої температури та поточної температури теплоносія та від швидкості підвищення температури теплоносія з можливістю переходу на форсований режим роботи модуля нагріву.2. Система за п. 1, яка відрізняється тим,...
Система керування роботою модуля нагріву
Номер патенту: 61942
Опубліковано: 10.08.2011
Автори: Мороз Петро Микитович, Степанов Микола Васильович
МПК: F24H 1/00
Мітки: роботою, модуля, нагріву, система, керування
Формула / Реферат:
1. Система керування роботою модуля нагріву, що приєднаний трубопроводами до пластинчастого теплообмінника системи гарячого водопостачання будинку, яка відрізняється тим, що містить електронний блок, який виконаний з можливістю керування одночасним або поступовим вмиканням/вимиканням окремих нагрівальних елементів модуля нагріву в залежності від різниці заданої та поточної витрати води через пластинчастий теплообмінник і швидкості зміни цієї...
Пристрій для енергетичного модуля геліостанції
Номер патенту: 91039
Опубліковано: 25.06.2014
Автор: Мокрицький Павло Миколайович
МПК: F24J 2/54
Мітки: геліостанції, пристрій, енергетичного, модуля
Формула / Реферат:
Пристрій для енергетичного модуля геліостанції, що складається з корпуса, шарнірно закріпленого на вертикальному валу з рамою для сонячних батарей, шарнірно закріплених на горизонтальному валу корпуса, який відрізняється тим, що, для забезпечення роботи низки таких пристроїв від спільного приводу, корпус пристрою виконаний у вигляді циліндра зі шківом на зовнішній циліндричній поверхні, а для збереження кінематичного зв'язку між азимутальним...
Система орієнтації геліоенергетичних модулів
Номер патенту: 109046
Опубліковано: 10.07.2015
Автори: Костюков Ігор Юрійович, Тарасов Сергій Васильович, Буряк Олександр Афанасійович, Дзензерський Віктор Олександрович
МПК: H02S 20/30, F24J 2/46, H01L 31/042, F24J 2/54
Мітки: модулів, геліоенергетичних, орієнтації, система
Формула / Реферат:
Система орієнтації геліоенергетичних модулів, що містить силову опорну конструкцію, встановлену на нерухомій основі і виконану з можливістю обертання від приводу, і консоль для закріплення модулів, яка відрізняється тим, що опорна конструкція виконана у вигляді нерухомо закріпленої на фундаменті і зміцненої косими фермами вертикальної штанги, що складається з двох ділянок різного діаметра, із встановленими на кожній ділянці по два...
Попередній патент: Гребний гвинт оніпка
Наступний патент: Пристрій для дозування твердої харчової добавки і спосіб дозування
Випадковий патент: Спосіб стабілізації витрати повітря в період пуску виробництва азотної кислоти