Спосіб та пристрій для керування накопичувачами електричної енергії для силового живлення електромобіля
Формула / Реферат
1. Спосіб керування роботою електричного живлення транспортного засобу (3) з електричним двигуном, що містить принаймні два паралельно сполучених модулі (11) накопичення енергії, при цьому зазначені модулі виконані з можливістю забезпечувати двигуну видавану електричну потужність в межах між заздалегідь визначеною максимальною потужністю і заздалегідь визначеною мінімальною потужністю, який відрізняється тим, що містить наступні етапи:
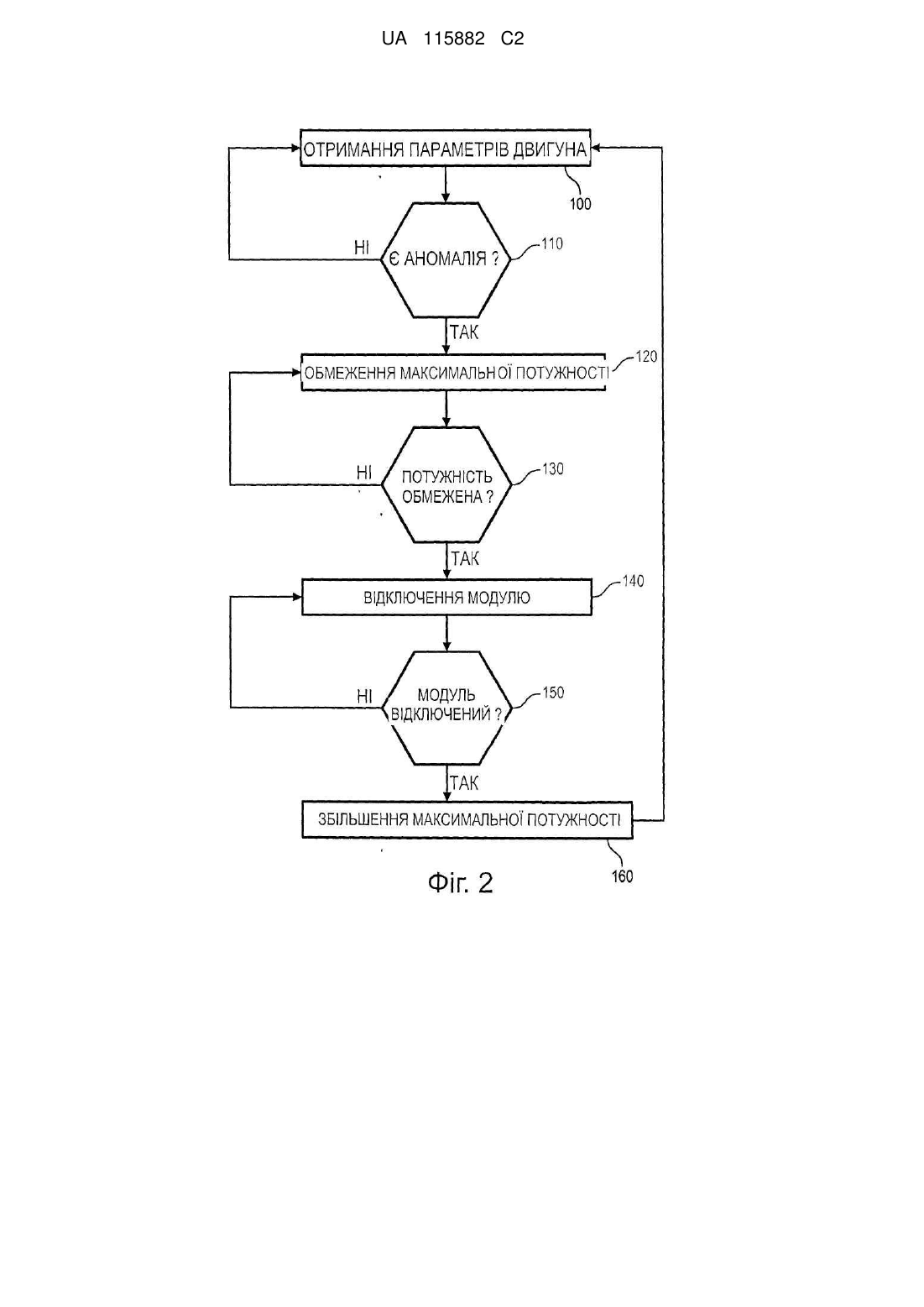
виявлення (100, 110) аномалії в роботі принаймні одного несправного модуля, за допомогою блока (2) обробки,
управління блоком обробки так, щоб блок обробки управляв силовим контролером для пониження (120, 130) максимальної потужності, що видається модулями в електричний двигун, зберігаючи при цьому вказану максимальну потужність, чітко вище нульової потужності,
електричне відключення (140) кожного несправного модуля після пониження максимальної потужності за допомогою силового контролера, причому
транспортний засіб містить
силовий контролер, який дозволяє контролювати потужність, що видається модулями (11), залежно від потужності, яку запитав користувач транспортного засобу, при цьому максимальна потужність відповідає пороговій потужності контролера, причому цей силовий контролер містить конденсатор, що встановлений паралельно з варіатором для зміни потужності, що видається електричному двигуну, і
блок обробки для здійснення діагностики модулів накопичення енергії і управління силовим контролером.
2. Спосіб керування за п. 1, який відрізняється тим, що етап пониження максимальної потужності включає підетапи, на яких:
подають команду на пониження максимальної потужності, яку можуть видавати модулі, потім
вичікують заздалегідь визначений період часу, перш ніж здійснити етап відключення.
3. Спосіб за п. 1, який відрізняється тим, що етап пониження максимальної потужності включає підетапи, на яких:
подають команду на пониження максимальної потужності, яку можуть видавати модулі, потім
прочитують принаймні один параметр, пов'язаний з потужністю двигуна,
перевіряють, щоб зазначений принаймні один параметр відповідав критерію пониження потужності:
якщо зазначений параметр пониження потужності дотриманий, здійснюють етап відключення,
якщо немає, то повертаються на етап визначення зазначеного принаймні одного параметра, пов'язаного з потужністю двигуна.
4. Спосіб керування за будь-яким з пп. 1-3, який відрізняється тим, що етап виявлення включає для кожного модуля наступні підетапи:
прочитують (100) принаймні один параметр, що відображає характеристики даного модуля, і
принаймні для одного параметра порівнюють (110) значення параметра принаймні з одним заздалегідь визначеним пороговим значенням для ідентифікації можливої аномалії в роботі даного модуля.
5. Спосіб керування за будь-яким з пп. 1-4, який відрізняється тим, що додатково містить етап (160), на якому блок обробки управляє силовим контролером для підвищення максимальної потужності, яку можуть видавати модулі, при цьому зазначений етап підвищення здійснюють після етапу відключення.
6. Спосіб керування за будь-яким з пп. 1-5, який відрізняється тим, що додатково містить етап передачі тривожного сигналу в звуковий або візуальний сигнальний прилад транспортного засобу для сповіщення користувача про аномалію та/або відключення.
7. Спосіб керування за будь-яким з пп. 1-6, який відрізняється тим, що етап пониження максимальної потужності полягає в безперервному пониженні максимальної потужності, яку можуть видавати модулі так, щоб зміна максимальній потужності була поступовою, зокрема лінійною.
8. Спосіб керування за будь-яким з пп. 1-7, який відрізняється тим, що додатково містить етап вичікування протягом заздалегідь визначеного часу між етапом виявлення і етапом пониження.
9. Спосіб керування за будь-яким з пп. 1-8, який відрізняється тим, що під час принаймні одного запуску транспортного засобу додатково містить етап попереднього навантаження силового контролера, при цьому зазначений етап попереднього навантаження включає електричне підключення силового контролера до даного модуля так, щоб підвищити напругу на клемах силового контролера перед його підключенням до всіх модулів.
10. Спосіб керування за п. 9, який відрізняється тим, що етап попереднього навантаження включає підетап, на якому вибирають різний заданий модуль при кожному запуску транспортного засобу (3).
11. Спосіб керування за п. 10, який відрізняється тим, що перед підетапом вибору різного даного модуля етап попереднього навантаження включає підетап, на якому визначають групу несправних модулів, виявлених під час попереднього запуску транспортного засобу, при цьому підетап вибору полягає у виборі даного модуля серед модулів, що не входять до групи виявлених несправних модулів.
12. Спосіб керування за будь-яким з пп. 1-11, який відрізняється тим, що принаймні один модуль накопичення енергії містить множину послідовно сполучених елементів батареї.
13. Система керування роботою електричного живлення транспортного засобу (3) з електричним двигуном (4), що містить принаймні два паралельно сполучених модулі (11) накопичення енергії, при цьому зазначені модулі виконані з можливістю забезпечувати двигуну видавану електричну потужність в межах між заздалегідь визначеною максимальною потужністю і заздалегідь визначеною мінімальною потужністю, яка відрізняється тим, що містить:
блок (2) обробки для виявлення аномалії в роботі принаймні одного несправного модуля і відключення кожного несправного модуля,
силовий контролер, який дозволяє контролювати потужність, що видається модулями (11), залежно від потужності, яку запитав користувач транспортного засобу, при цьому максимальна потужність відповідає пороговій потужності контролера, причому цей силовий контролер містить конденсатор, що встановлений паралельно з варіатором для зміни потужності, що видається електричному двигуну,
при цьому блок (2) обробки виконаний з можливістю управління силовим контролером для пониження максимальної потужності, що видається модулями в електричний двигун, зберігаючи при цьому вказану максимальну потужність чітко вище за нульову потужність.
Текст
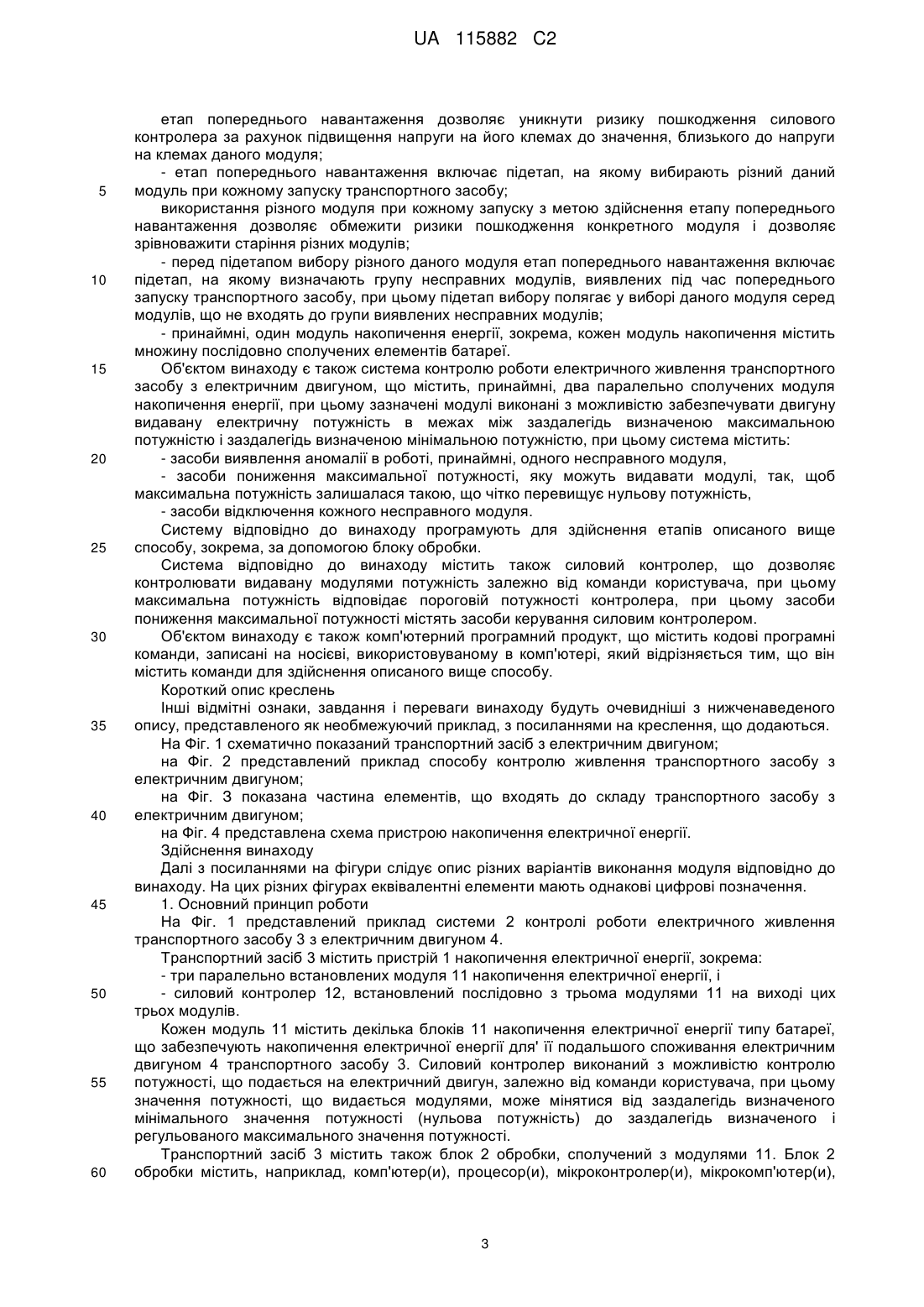
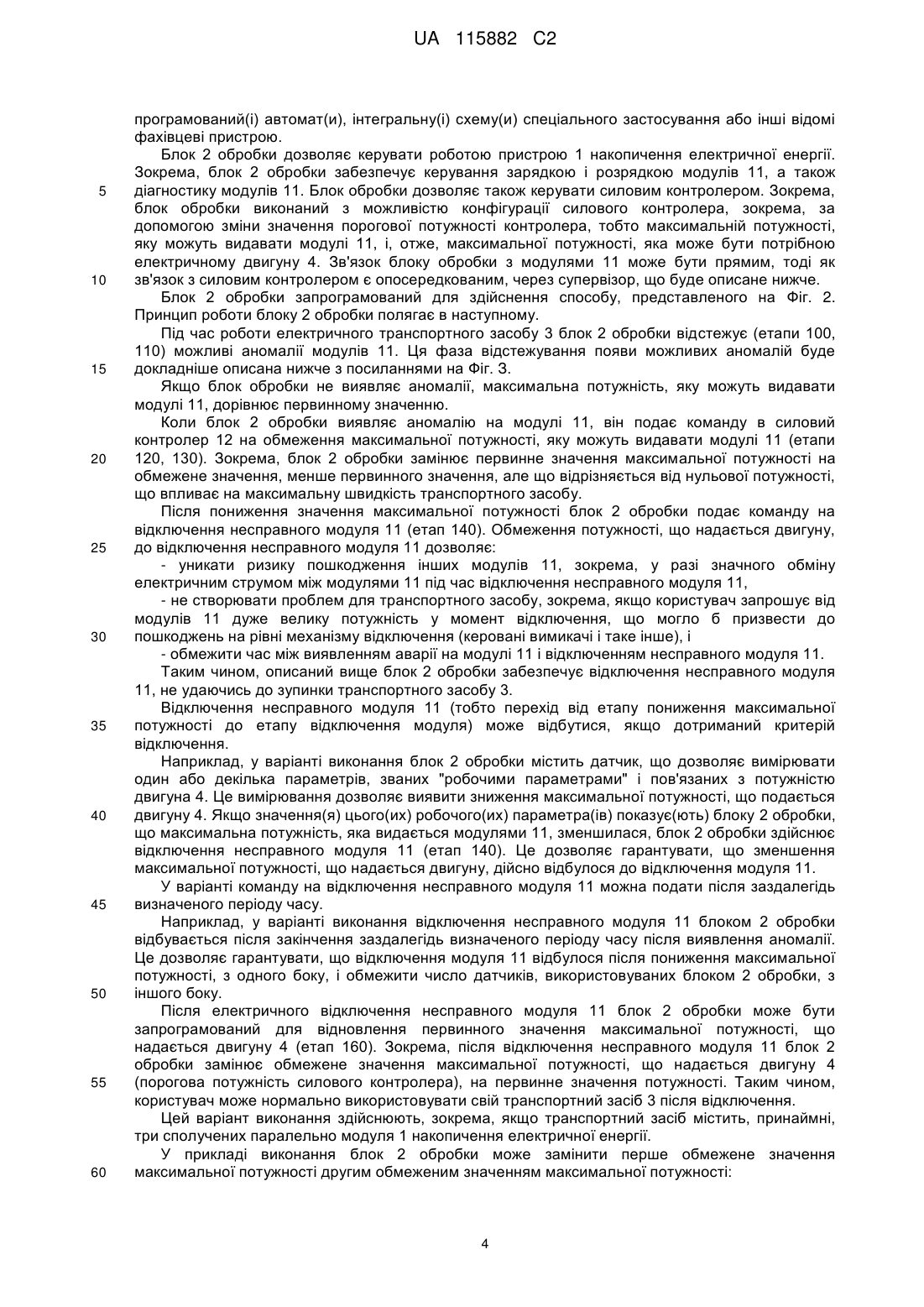
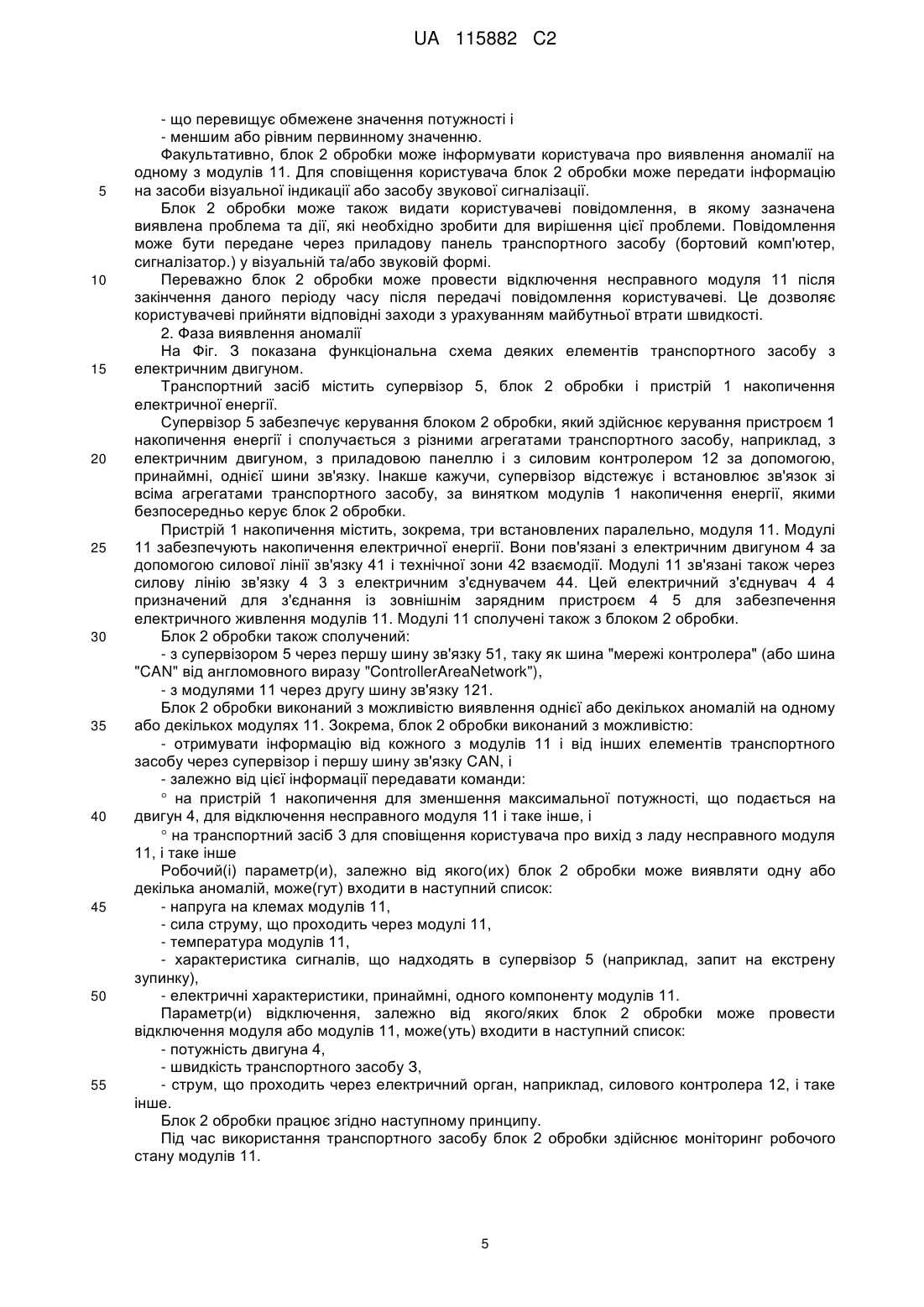
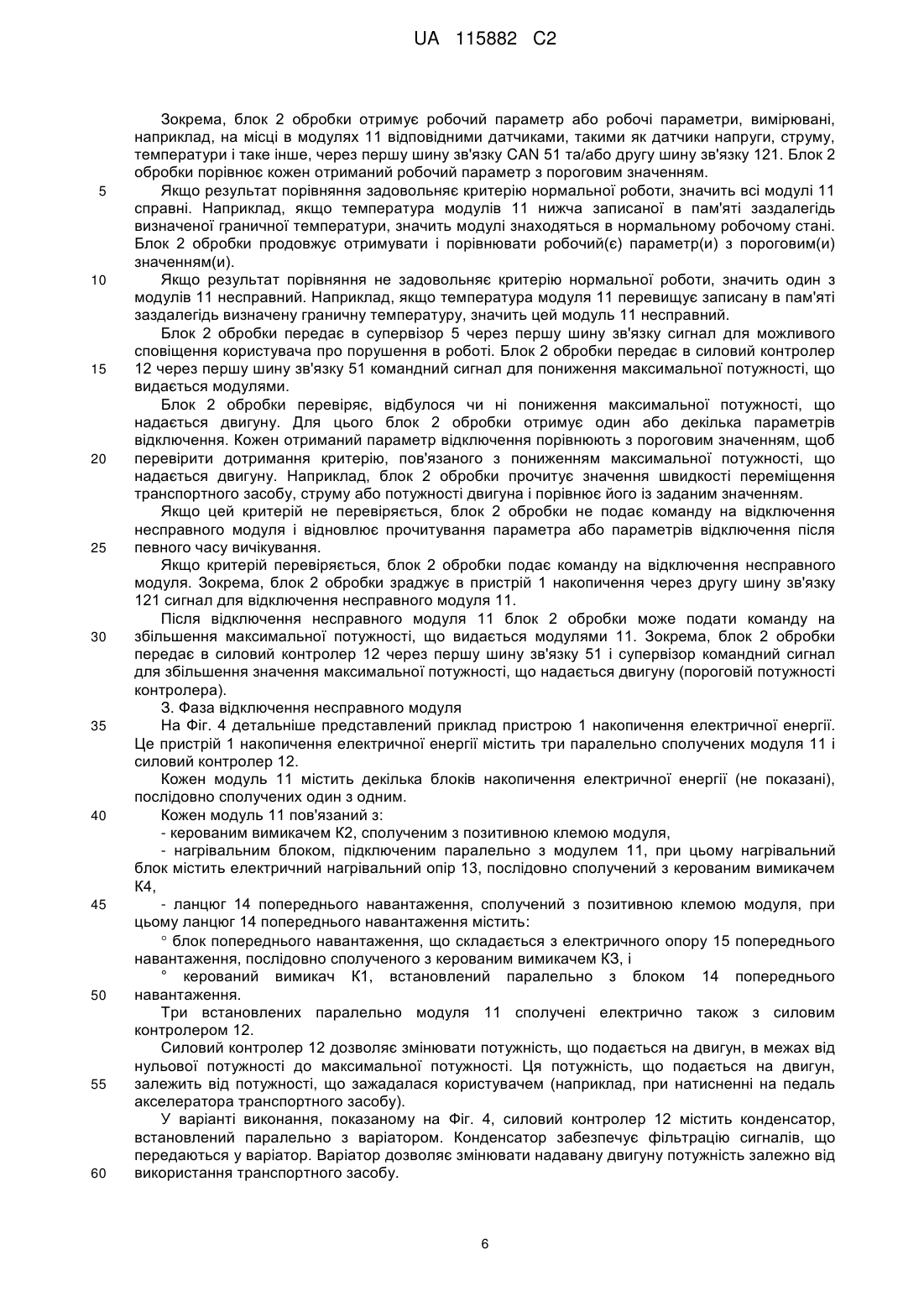
Реферат: Винахід належить до способу керування роботою електричного живлення транспортного засобу з електричним двигуном, що містить принаймні два паралельно сполучених модулі накопичення енергії, при цьому зазначені модулі виконані з можливістю забезпечувати двигуну видавану електричну потужність в межах між заздалегідь визначеною максимальною потужністю і заздалегідь визначеною мінімальною потужністю. Згідно з винаходом, спосіб включає наступні етапи: виявлення (100, 110) аномалії в роботі принаймні одного несправного модуля, пониження (120, 130) максимальної потужності, яку можуть видавати модулі, електричне відключення (140) кожного несправного модуля, при цьому етап відключення здійснюють після пониження максимальної потужності. UA 115882 C2 (12) UA 115882 C2 UA 115882 C2 5 10 15 20 25 30 35 40 45 50 55 60 Область техніки, до якої відноситься винахід Винахід відноситься до загальної технічної області блоків накопичення електричної енергії. Зокрема, винахід відноситься до області модулів, що містять, принаймні, два блоки накопичення електричної енергії. В рамках даного винаходу під "блоком накопичення електричної енергії" слід розуміти або конденсатор (тобто, пасивну систему, що містить два електроди та ізолятор), або суперконденсатор (тобто, систему, що містить два електроди, електроліт і роздільник), або батарею типу літієвої батареї (тобто, систему, що містить анод, катод і електроліт між анодом і катодом). Рівень техніки Відомі модулі, що звані також батарейними вузлами, містять корпус, в якому розташовано декілька блоків накопичення електричної енергії, які є елементами батареї, послідовно сполученими за допомогою засобів з'єднаннями. Ці модулі містять також електронну плату керування, зокрема, для керування зарядкою і розрядкою блоків накопичення електричної енергії або забезпечення захисту усередині модуля. Модуль можна використовувати для електричного живлення транспортного засобу з електричним двигуном, такого як автобус, вантажівка або легковий автомобіль. Для цього транспортний засіб містить на виході батарей варіатор, що дозволяє змінювати потужність, що передається на двигун, залежно від зовнішніх команд, зокрема, від команд користувача. Кожен транспортний засіб може містити декілька паралельно сполучених модулів, зокрема, якщо потреби транспортного засобу в потужності є значними. Однією з існуючих проблем є керування роботою цих модулів, зокрема, якщо характеристики модулів починають різнитися унаслідок точкового або не точкового порушення в роботі одного з батарейних вузлів. Завдання винаходу полягає в створенні способу і системи, що дозволяють контролювати роботу модулів накопичення електричної енергії транспортного засобу з електричним двигуном, що містить, принаймні, два паралельно сполучених модуля накопичення електричної енергії. Розкриття винаходу У зв'язку з цим, об'єктом винаходу є спосіб керування роботою електричного живлення транспортного засобу з електричним двигуном, що містить, принаймні, два паралельно сполучених модуля накопичення енергії, при цьому зазначені модулі виконані з можливістю забезпечувати двигуну видавану електричну потужність в межах між заздалегідь визначеною максимальною потужністю і заздалегідь визначеною мінімальною потужністю, що відрізняється тим, що містить наступні етапи: - виявлення аномалії в роботі, принаймні, одного несправного модуля, - пониження максимальної потужності, яку можуть видавати модулі, при цьому максимальна потужність, що отримується після етапу відключення, чітко перевищує нульову потужність, зокрема, мінімальну потужність, - електричне відключення кожного несправного модуля, при цьому етап відключення здійснюють після пониження максимальної потужності. Переважно транспортний засіб містить силовий контролер, що дозволяє контролювати потужність, що видається модулями, залежно від команди користувача, при цьому максимальна потужність відповідає пороговій потужності контролера, при цьому пониження максимальної потужності відбувається за командою силового контролера. Таким чином, на працюючому транспортному засобі відключення несправного модуля накопичення енергії можна проводити без зупинки транспортного засобу. Це забезпечує: - високий рівень безпеки, з одного боку, зокрема, за рахунок обмеження ризику пошкодження модулів накопичення електричної енергії в результаті значного обміну струмом між модулями накопичення енергії, - високу гнучкість використання для користувача, з іншого боку, зокрема, за рахунок забезпечення електричного відключення модуля накопичення енергії, але без необхідності для користувача зупиняти електричний транспортний засіб. Обмеження максимальної потужності, що подається на двигун, до відключення модуля накопичення енергії дозволяє: - уникати проблем з транспортним засобом, якщо користувач запрошує дуже велику потужність у момент відключення, що може призвести до пошкоджень на рівні механізму відключення (силових контакторів), - уникати дуже великої затримки відключення модуля накопичення енергії. Спосіб відповідно до винаходу має наступні переважні, але не обмежувальні ознаки: 1 UA 115882 C2 5 10 15 20 25 30 35 40 45 50 55 - етап пониження може включати підетапи, на яких: подають команду на пониження максимальної потужності, яку можуть видавати модулі, потім вичікують заздалегідь визначений період часу, перш ніж здійснити етап відключення; при цьому подача команди на відключення несправного модуля після заздалегідь визначеного періоду часу гарантує, що максимальна потужність, що подається на двигун, дійсно зменшилася, коли здійснюють етап відключення модуля - у варіанті етап пониження може включати підетапи, на яких: подають команду на пониження максимальної потужності, яку можуть видавати модулі, потім прочитують, принаймні, один параметр, пов'язаний з потужністю двигуна, перевіряють, щоб'зазначений, принаймні, параметр відповідав критерію пониження потужності: : якщо зазначений параметр пониження потужності дотриманий, здійснюють етап відключення, : інакше повертаються на етап прочитування зазначеного, принаймні, одного параметра, пов'язаного з потужністю двигуна; при цьому параметром, пов'язаним з потужністю двигуна, може бути, наприклад, потужність двигуна, швидкість переміщення транспортного засобу, сила струму, що проходить через двигун або варіатор, і т.д.; при цьому взаємозв'язок відключення несправного модуля з дотриманням критерію дозволяє, з одного боку, переконатися, що максимальна потужність, що надається двигуну, дійсно була знижена до відключення модуля і, з іншого боку, обмежити час між дійсним пониженням максимальної потужності та відключенням несправного модуля; - етап виявлення може включати для кожного модуля наступні підетапи: прочитують, принаймні, один параметр, що відображає характеристики даного модуля, і °принаймні, для одного параметра порівнюють значення параметра, принаймні, з одним заздалегідь визначеним пороговим значенням для ідентифікації можливої аномалії в роботі даного модуля; при цьому параметром, що відображає характеристики модуля, може бути, наприклад, напруга на клемах модуля або сила електричного струму, що проходить через нього, температура модуля і т.д.; при цьому аномалію можна виявити, якщо параметр перевищує порогове значення або якщо отримана конкретна комбінація параметрів, шо перевищує чи ні пооогове значення; - спосіб додатково містить етап підвищення максимальної потужності, яку можуть видавати модулі, при цьому зазначений етап підвищення здійснюють після етапу відключення. Цей етап, як і будь-який етап пониження або підвищення потужності, здійснюють, зокрема, шляхом подачі команди на силовий контролер; це дозволяє користувачеві використовувати транспортний засіб після відключення несправного модуля; - спосіб додатково містить етап передачі тривожного сигналу в звуковий або візуальний сигнальний прилад транспортного засобу для сповіщення користувача про аномалію та/або відключення; це дозволяє інформувати користувача про аномалію, щоб він міг зробити відповідні заходи з урахуванням можливої подальшої втрати швидкості, - етап пониження полягає в безперервному пониженні максимальної потужності, яку можуть видавати модулі, так, щоб зміна максимальній потужності була поступовою, зокрема, лінійною; це дозволяє уникнути різкого падіння швидкості переміщення транспортного засобу і, отже, обмежити ризики дорожньо-транспортних випадків, - спосіб додатково містить етап вичікування протягом заздалегідь визначеного часу між етапом виявлення і етапом пониження; це вичікування забезпечує користувачеві час, достатній для адаптації його водіння до можливої подальшій втраті швидкості, - принаймні, під час запуску транспортного засобу спосіб містить етап попереднього навантаження силового контролера, такого як варіатор, що дозволяє контролювати видавану модулями потужність залежно від команди користувача, при цьому зазначений етап попереднього навантаження включає електричне підключення силового контролера до даного модуля так, щоб підвищити напругу на клемах силового контролера перед його підключенням до всіх модулів; 2 UA 115882 C2 5 10 15 20 25 30 35 40 45 50 55 60 етап попереднього навантаження дозволяє уникнути ризику пошкодження силового контролера за рахунок підвищення напруги на його клемах до значення, близького до напруги на клемах даного модуля; - етап попереднього навантаження включає підетап, на якому вибирають різний даний модуль при кожному запуску транспортного засобу; використання різного модуля при кожному запуску з метою здійснення етапу попереднього навантаження дозволяє обмежити ризики пошкодження конкретного модуля і дозволяє зрівноважити старіння різних модулів; - перед підетапом вибору різного даного модуля етап попереднього навантаження включає підетап, на якому визначають групу несправних модулів, виявлених під час попереднього запуску транспортного засобу, при цьому підетап вибору полягає у виборі даного модуля серед модулів, що не входять до групи виявлених несправних модулів; - принаймні, один модуль накопичення енергії, зокрема, кожен модуль накопичення містить множину послідовно сполучених елементів батареї. Об'єктом винаходу є також система контролю роботи електричного живлення транспортного засобу з електричним двигуном, що містить, принаймні, два паралельно сполучених модуля накопичення енергії, при цьому зазначені модулі виконані з можливістю забезпечувати двигуну видавану електричну потужність в межах між заздалегідь визначеною максимальною потужністю і заздалегідь визначеною мінімальною потужністю, при цьому система містить: - засоби виявлення аномалії в роботі, принаймні, одного несправного модуля, - засоби пониження максимальної потужності, яку можуть видавати модулі, так, щоб максимальна потужність залишалася такою, що чітко перевищує нульову потужність, - засоби відключення кожного несправного модуля. Систему відповідно до винаходу програмують для здійснення етапів описаного вище способу, зокрема, за допомогою блоку обробки. Система відповідно до винаходу містить також силовий контролер, що дозволяє контролювати видавану модулями потужність залежно від команди користувача, при цьому максимальна потужність відповідає пороговій потужності контролера, при цьому засоби пониження максимальної потужності містять засоби керування силовим контролером. Об'єктом винаходу є також комп'ютерний програмний продукт, що містить кодові програмні команди, записані на носієві, використовуваному в комп'ютері, який відрізняється тим, що він містить команди для здійснення описаного вище способу. Короткий опис креслень Інші відмітні ознаки, завдання і переваги винаходу будуть очевидніші з нижченаведеного опису, представленого як необмежуючий приклад, з посиланнями на креслення, що додаються. На Фіг. 1 схематично показаний транспортний засіб з електричним двигуном; на Фіг. 2 представлений приклад способу контролю живлення транспортного засобу з електричним двигуном; на Фіг. З показана частина елементів, що входять до складу транспортного засобу з електричним двигуном; на Фіг. 4 представлена схема пристрою накопичення електричної енергії. Здійснення винаходу Далі з посиланнями на фігури слідує опис різних варіантів виконання модуля відповідно до винаходу. На цих різних фігурах еквівалентні елементи мають однакові цифрові позначення. 1. Основний принцип роботи На Фіг. 1 представлений приклад системи 2 контролі роботи електричного живлення транспортного засобу 3 з електричним двигуном 4. Транспортний засіб 3 містить пристрій 1 накопичення електричної енергії, зокрема: - три паралельно встановлених модуля 11 накопичення електричної енергії, і - силовий контролер 12, встановлений послідовно з трьома модулями 11 на виході цих трьох модулів. Кожен модуль 11 містить декілька блоків 11 накопичення електричної енергії типу батареї, що забезпечують накопичення електричної енергії для' її подальшого споживання електричним двигуном 4 транспортного засобу 3. Силовий контролер виконаний з можливістю контролю потужності, що подається на електричний двигун, залежно від команди користувача, при цьому значення потужності, що видається модулями, може мінятися від заздалегідь визначеного мінімального значення потужності (нульова потужність) до заздалегідь визначеного і регульованого максимального значення потужності. Транспортний засіб 3 містить також блок 2 обробки, сполучений з модулями 11. Блок 2 обробки містить, наприклад, комп'ютер(и), процесор(и), мікроконтролер(и), мікрокомп'ютер(и), 3 UA 115882 C2 5 10 15 20 25 30 35 40 45 50 55 60 програмований(і) автомат(и), інтегральну(і) схему(и) спеціального застосування або інші відомі фахівцеві пристрою. Блок 2 обробки дозволяє керувати роботою пристрою 1 накопичення електричної енергії. Зокрема, блок 2 обробки забезпечує керування зарядкою і розрядкою модулів 11, а також діагностику модулів 11. Блок обробки дозволяє також керувати силовим контролером. Зокрема, блок обробки виконаний з можливістю конфігурації силового контролера, зокрема, за допомогою зміни значення порогової потужності контролера, тобто максимальній потужності, яку можуть видавати модулі 11, і, отже, максимальної потужності, яка може бути потрібною електричному двигуну 4. Зв'язок блоку обробки з модулями 11 може бути прямим, тоді як зв'язок з силовим контролером є опосередкованим, через супервізор, що буде описане нижче. Блок 2 обробки запрограмований для здійснення способу, представленого на Фіг. 2. Принцип роботи блоку 2 обробки полягає в наступному. Під час роботи електричного транспортного засобу 3 блок 2 обробки відстежує (етапи 100, 110) можливі аномалії модулів 11. Ця фаза відстежування появи можливих аномалій буде докладніше описана нижче з посиланнями на Фіг. З. Якщо блок обробки не виявляє аномалії, максимальна потужність, яку можуть видавати модулі 11, дорівнює первинному значенню. Коли блок 2 обробки виявляє аномалію на модулі 11, він подає команду в силовий контролер 12 на обмеження максимальної потужності, яку можуть видавати модулі 11 (етапи 120, 130). Зокрема, блок 2 обробки замінює первинне значення максимальної потужності на обмежене значення, менше первинного значення, але що відрізняється від нульової потужності, що впливає на максимальну швидкість транспортного засобу. Після пониження значення максимальної потужності блок 2 обробки подає команду на відключення несправного модуля 11 (етап 140). Обмеження потужності, що надається двигуну, до відключення несправного модуля 11 дозволяє: - уникати ризику пошкодження інших модулів 11, зокрема, у разі значного обміну електричним струмом між модулями 11 під час відключення несправного модуля 11, - не створювати проблем для транспортного засобу, зокрема, якщо користувач запрошує від модулів 11 дуже велику потужність у момент відключення, що могло б призвести до пошкоджень на рівні механізму відключення (керовані вимикачі і таке інше), і - обмежити час між виявленням аварії на модулі 11 і відключенням несправного модуля 11. Таким чином, описаний вище блок 2 обробки забезпечує відключення несправного модуля 11, не удаючись до зупинки транспортного засобу 3. Відключення несправного модуля 11 (тобто перехід від етапу пониження максимальної потужності до етапу відключення модуля) може відбутися, якщо дотриманий критерій відключення. Наприклад, у варіанті виконання блок 2 обробки містить датчик, що дозволяє вимірювати один або декілька параметрів, званих "робочими параметрами" і пов'язаних з потужністю двигуна 4. Це вимірювання дозволяє виявити зниження максимальної потужності, що подається двигуну 4. Якщо значення(я) цього(их) робочого(их) параметра(ів) показує(ють) блоку 2 обробки, що максимальна потужність, яка видається модулями 11, зменшилася, блок 2 обробки здійснює відключення несправного модуля 11 (етап 140). Це дозволяє гарантувати, що зменшення максимальної потужності, що надається двигуну, дійсно відбулося до відключення модуля 11. У варіанті команду на відключення несправного модуля 11 можна подати після заздалегідь визначеного періоду часу. Наприклад, у варіанті виконання відключення несправного модуля 11 блоком 2 обробки відбувається після закінчення заздалегідь визначеного періоду часу після виявлення аномалії. Це дозволяє гарантувати, що відключення модуля 11 відбулося після пониження максимальної потужності, з одного боку, і обмежити число датчиків, використовуваних блоком 2 обробки, з іншого боку. Після електричного відключення несправного модуля 11 блок 2 обробки може бути запрограмований для відновлення первинного значення максимальної потужності, що надається двигуну 4 (етап 160). Зокрема, після відключення несправного модуля 11 блок 2 обробки замінює обмежене значення максимальної потужності, що надається двигуну 4 (порогова потужність силового контролера), на первинне значення потужності. Таким чином, користувач може нормально використовувати свій транспортний засіб 3 після відключення. Цей варіант виконання здійснюють, зокрема, якщо транспортний засіб містить, принаймні, три сполучених паралельно модуля 1 накопичення електричної енергії. У прикладі виконання блок 2 обробки може замінити перше обмежене значення максимальної потужності другим обмеженим значенням максимальної потужності: 4 UA 115882 C2 5 10 15 20 25 30 35 40 45 50 55 - що перевищує обмежене значення потужності і - меншим або рівним первинному значенню. Факультативно, блок 2 обробки може інформувати користувача про виявлення аномалії на одному з модулів 11. Для сповіщення користувача блок 2 обробки може передати інформацію на засоби візуальної індикації або засобу звукової сигналізації. Блок 2 обробки може також видати користувачеві повідомлення, в якому зазначена виявлена проблема та дії, які необхідно зробити для вирішення цієї проблеми. Повідомлення може бути передане через приладову панель транспортного засобу (бортовий комп'ютер, сигналізатор.) у візуальній та/або звуковій формі. Переважно блок 2 обробки може провести відключення несправного модуля 11 після закінчення даного періоду часу після передачі повідомлення користувачеві. Це дозволяє користувачеві прийняти відповідні заходи з урахуванням майбутньої втрати швидкості. 2. Фаза виявлення аномалії На Фіг. З показана функціональна схема деяких елементів транспортного засобу з електричним двигуном. Транспортний засіб містить супервізор 5, блок 2 обробки і пристрій 1 накопичення електричної енергії. Супервізор 5 забезпечує керування блоком 2 обробки, який здійснює керування пристроєм 1 накопичення енергії і сполучається з різними агрегатами транспортного засобу, наприклад, з електричним двигуном, з приладовою панеллю і з силовим контролером 12 за допомогою, принаймні, однієї шини зв'язку. Інакше кажучи, супервізор відстежує і встановлює зв'язок зі всіма агрегатами транспортного засобу, за винятком модулів 1 накопичення енергії, якими безпосередньо керує блок 2 обробки. Пристрій 1 накопичення містить, зокрема, три встановлених паралельно, модуля 11. Модулі 11 забезпечують накопичення електричної енергії. Вони пов'язані з електричним двигуном 4 за допомогою силової лінії зв'язку 41 і технічної зони 42 взаємодії. Модулі 11 зв'язані також через силову лінію зв'язку 4 3 з електричним з'єднувачем 44. Цей електричний з'єднувач 4 4 призначений для з'єднання із зовнішнім зарядним пристроєм 4 5 для забезпечення електричного живлення модулів 11. Модулі 11 сполучені також з блоком 2 обробки. Блок 2 обробки також сполучений: - з супервізором 5 через першу шину зв'язку 51, таку як шина "мережі контролера" (або шина "CAN" від англомовного виразу "ControllerAreaNetwork"), - з модулями 11 через другу шину зв'язку 121. Блок 2 обробки виконаний з можливістю виявлення однієї або декількох аномалій на одному або декількох модулях 11. Зокрема, блок 2 обробки виконаний з можливістю: - отримувати інформацію від кожного з модулів 11 і від інших елементів транспортного засобу через супервізор і першу шину зв'язку CAN, і - залежно від цієї інформації передавати команди: на пристрій 1 накопичення для зменшення максимальної потужності, що подається на двигун 4, для відключення несправного модуля 11 і таке інше, і на транспортний засіб 3 для сповіщення користувача про вихід з ладу несправного модуля 11, і таке інше Робочий(і) параметр(и), залежно від якого(их) блок 2 обробки може виявляти одну або декілька аномалій, може(гут) входити в наступний список: - напруга на клемах модулів 11, - сила струму, що проходить через модулі 11, - температура модулів 11, - характеристика сигналів, що надходять в супервізор 5 (наприклад, запит на екстрену зупинку), - електричні характеристики, принаймні, одного компоненту модулів 11. Параметр(и) відключення, залежно від якого/яких блок 2 обробки може провести відключення модуля або модулів 11, може(уть) входити в наступний список: - потужність двигуна 4, - швидкість транспортного засобу З, - струм, що проходить через електричний орган, наприклад, силового контролера 12, і таке інше. Блок 2 обробки працює згідно наступному принципу. Під час використання транспортного засобу блок 2 обробки здійснює моніторинг робочого стану модулів 11. 5 UA 115882 C2 5 10 15 20 25 30 35 40 45 50 55 60 Зокрема, блок 2 обробки отримує робочий параметр або робочі параметри, вимірювані, наприклад, на місці в модулях 11 відповідними датчиками, такими як датчики напруги, струму, температури і таке інше, через першу шину зв'язку CAN 51 та/або другу шину зв'язку 121. Блок 2 обробки порівнює кожен отриманий робочий параметр з пороговим значенням. Якщо результат порівняння задовольняє критерію нормальної роботи, значить всі модулі 11 справні. Наприклад, якщо температура модулів 11 нижча записаної в пам'яті заздалегідь визначеної граничної температури, значить модулі знаходяться в нормальному робочому стані. Блок 2 обробки продовжує отримувати і порівнювати робочий(є) параметр(и) з пороговим(и) значенням(и). Якщо результат порівняння не задовольняє критерію нормальної роботи, значить один з модулів 11 несправний. Наприклад, якщо температура модуля 11 перевищує записану в пам'яті заздалегідь визначену граничну температуру, значить цей модуль 11 несправний. Блок 2 обробки передає в супервізор 5 через першу шину зв'язку сигнал для можливого сповіщення користувача про порушення в роботі. Блок 2 обробки передає в силовий контролер 12 через першу шину зв'язку 51 командний сигнал для пониження максимальної потужності, що видається модулями. Блок 2 обробки перевіряє, відбулося чи ні пониження максимальної потужності, що надається двигуну. Для цього блок 2 обробки отримує один або декілька параметрів відключення. Кожен отриманий параметр відключення порівнюють з пороговим значенням, щоб перевірити дотримання критерію, пов'язаного з пониженням максимальної потужності, що надається двигуну. Наприклад, блок 2 обробки прочитує значення швидкості переміщення транспортного засобу, струму або потужності двигуна і порівнює його із заданим значенням. Якщо цей критерій не перевіряється, блок 2 обробки не подає команду на відключення несправного модуля і відновлює прочитування параметра або параметрів відключення після певного часу вичікування. Якщо критерій перевіряється, блок 2 обробки подає команду на відключення несправного модуля. Зокрема, блок 2 обробки зраджує в пристрій 1 накопичення через другу шину зв'язку 121 сигнал для відключення несправного модуля 11. Після відключення несправного модуля 11 блок 2 обробки може подати команду на збільшення максимальної потужності, що видається модулями 11. Зокрема, блок 2 обробки передає в силовий контролер 12 через першу шину зв'язку 51 і супервізор командний сигнал для збільшення значення максимальної потужності, що надається двигуну (пороговій потужності контролера). З. Фаза відключення несправного модуля На Фіг. 4 детальніше представлений приклад пристрою 1 накопичення електричної енергії. Це пристрій 1 накопичення електричної енергії містить три паралельно сполучених модуля 11 і силовий контролер 12. Кожен модуль 11 містить декілька блоків накопичення електричної енергії (не показані), послідовно сполучених один з одним. Кожен модуль 11 пов'язаний з: - керованим вимикачем К2, сполученим з позитивною клемою модуля, - нагрівальним блоком, підключеним паралельно з модулем 11, при цьому нагрівальний блок містить електричний нагрівальний опір 13, послідовно сполучений з керованим вимикачем К4, - ланцюг 14 попереднього навантаження, сполучений з позитивною клемою модуля, при цьому ланцюг 14 попереднього навантаження містить: блок попереднього навантаження, що складається з електричного опору 15 попереднього навантаження, послідовно сполученого з керованим вимикачем КЗ, і ° керований вимикач К1, встановлений паралельно з блоком 14 попереднього навантаження. Три встановлених паралельно модуля 11 сполучені електрично також з силовим контролером 12. Силовий контролер 12 дозволяє змінювати потужність, що подається на двигун, в межах від нульової потужності до максимальної потужності. Ця потужність, що подається на двигун, залежить від потужності, що зажадалася користувачем (наприклад, при натисненні на педаль акселератора транспортного засобу). У варіанті виконання, показаному на Фіг. 4, силовий контролер 12 містить конденсатор, встановлений паралельно з варіатором. Конденсатор забезпечує фільтрацію сигналів, що передаються у варіатор. Варіатор дозволяє змінювати надавану двигуну потужність залежно від використання транспортного засобу. 6 UA 115882 C2 5 10 15 20 25 30 35 40 45 50 55 60 Блок 2 обробки підключений до силового контролера 12 через першу шину зв'язку 51. Це дозволяє блоку обробки зменшувати/збільшувати значення максимальної потужності, визначене в силовому контролері. У варіанті виконання блок 2 обробки виконаний з можливістю лінійного зменшення (відповідно збільшення) значення максимальної потужності, визначеного в силовому контролері. Для цього блок обробки передає в силовий контролер через першу мережу зв'язку множину проміжних сигналів, відповідних проміжним значенням максимальної потужності. Значення послідовних проміжних сигналів є: - що зменшуються у разі поступового пониження максимальної потужності, що подається на двигун, або - що зростають у разі підвищення максимальної потужності, що подається на двигун. Далі слідує докладніший опис принципу підключення/відключення" модулів. Контроль дозволу запуску Перед будь-яким підключенням модулів 11 до двигуна блок обробки перевіряє, щоб не було розбіжності між напругою різних модулів 11. Якщо відхилення напруги між різними модулями входить в допустимий інтервал значень, блок обробки та/або супервізор вирішує запуск транспортного засобу. Інакше запуск транспортного засобу не дозволений, і блок обробки указує користувачеві через супервізор, що необхідно відновити зарядку транспортного засобу. Фаза попереднього навантаження Після дозволу запуску транспортного засобу і перед підключенням різних модулів 11 здійснюють фазу попереднього навантаження, під час якого: - для даного модуля вимикачі (тобто силові контактори) КЗ і К2 замкнуті і вимикач К1 розімкнений, - для інших модулів вимикачі Kl, К2, КЗ розімкнені. Блок обробки вимірює HanpyryVbatt на клемах даного модуля і HanpyryVpack на клемах силового контролера. При дотриманні певних критеріїв (наприклад, Vpack> 95 % Vbatt і Ipack< 2A) попереднє навантаження вважається завершеним. Цей етап попереднього навантаження дозволяє підвищити напругу на клемах фільтруючого конденсатора (і варіатора) до такого ж рівня, що і у даного модуля, щоб уникнути сильних і руйнуючих струмів під час підключення інших модулів. Тільки один з модулів може містити ланцюг 14 попереднього навантаження і може бути використаний для здійснення цієї фази попереднього навантаження при кожному запуску транспортного засобу. Проте, щоб оберігати модулі під час цієї фази попереднього навантаження, їх використовують по черзі при кожному запуску транспортного засобу залежно від команд, що подаються блоком обробки. Це забезпечує роботу пристрою накопичення енергії, навіть якщо один з модулів відключений. Підключення модулів Після здійснення фази попереднього навантаження блок обробки подає команду на підключення модулів до силового контролера. Модуль, використаний під час фази попереднього навантаження, підключають насамперед. Для підключення цього модуля пов'язаний з ним вимикач К1 замикають, а пов'язаний з ним вимикач КЗ розмикають (К2 залишається замкнутим). Після цього проводять підключення інших модулів (після часу вичікування), послідовно замикаючи вимикачі К2, потім К1 для кожного з цих модулів. У разі блоку обробки, що містить три модулі, під час фази підключення керовані вимикачі мають наступні стани: - первинні умови: попереднє навантаження дійсно проведене, сигнал "Розбіжність напруги вузла" (сигнал, що відноситься до відхилення напруги між модулями) відсутній, - під'єднування першого модуля: замикають керований вимикач Kl_packl, при цьому К2_раск1 залишається замкнутим, розмикають керований вимикач K3_packl (перший модуль приєднаний); - вичікування, запущене блоком обробки, після завершення вичікування переходять на наступний етап, - під'єднування другого модуля: замикають керований вимикач К2_раск2, потім° замикають керований вимикач К1_раск2 (другий модуль приєднаний), - вичікування, запущене блоком обробки, після завершення вичікування переходять на наступний етап, - під'єднування третього модуля: замикають керований вимикач К2_раскЗ, потім 7 UA 115882 C2 5 10 15 20 25 30 35 40 45 50 55 замикають керований вимикач К1_раскЗ (третій модуль приєднаний). Слід зазначити, що, природно, підключення здійснюють після надходження запиту на рух від транспортного засобу. Фаза руху Після підключення всіх трьох модулів транспортний засіб знаходиться у фазі руху- Блок обробки вимірює один або декілька параметрів, пов'язаних з різними модулями, наприклад: - електрична напруга на клемах кожного модуля, - температуру кожного модуля, - електричний струм кожного модуля і таке інше. Ці значення порівнюють із заздалегідь записаними в пам'яті пороговими значеннями. Якщо результат операції порівняння показує, що виміряні значення є нормальними, всі три модулі залишаються підключеними до силового контролера. Проте, якщо виміряні значення не є нормальними для одного з модулів, блок обробки відзначає несправність модуля. В цьому випадку блок обробки запускає етапи обмеження максимальної потужності і відключення несправного модуля, показані на Фіг. 2. Насамперед блок 2 обробки оповіщає користувача про виявлення аномалії. Для цього блок 2 обробки направляє повідомлення в супервізор 5, який передає повідомлення через першу шину зв'язку 51 транспортного засобу, щоб інформувати користувача, наприклад, за допомогою візуального сигналізатора, що знаходиться на приладовій панелі транспортного засобу, та/або звукового сигналу. Після передачі тривожного сигналу блок 2 обробки запускає таймер (або лічильник часу) на декілька секунд (наприклад, на 1 хвилину), щоб користувач встиг припаркуватися на узбіччі або у відповідному місці (у правому ряду, якщо він знаходиться на автодорозі), і таке інше. Після закінчення часу, заданого таймеру, блок обробки подає команду в силовий контролер для зменшення значення максимальної потужності (порогової потужності силового контролера), що надається двигуну. Таким чином, потужність, що зажадалася користувачем, поступово знижується і більше не залежить від дій користувача, якщо він запрошує потужність, що перевищує максимальну потужність. Блок обробки вимірює також значення параметра відключення, пов'язаного з потужністю, що зажадалася двигуном (наприклад, швидкість транспортного засобу, або сила струму варіатора або двигуна). Якщо значення параметра відключення нижче заданого значення, блок обробки, який отримує цю інформацію через першу шину зв'язку транспортного засобу (наприклад, швидкість транспортного засобу) або від вимірювальних датчиків пристрою накопичення електричної енергії, подає команду на відключення несправного модуля. Для цього блок обробки подає команду на розмикання вимикачів К1 і К2 несправного модуля. При цьому немає необхідності в додатковій перевірці, оскільки з урахуванням пониженнямаксимальної потужності, що надається двигуну, електричний струм Іраск, що проходить через силовий контролер, менший порогового значення, яке забезпечує безперешкодне відключення несправного модуля. Після відключення несправного модуля блок обробки подає команду на розмикання вимикача К4, що відповідає безпечному стану, оскільки всі керовані вимикачі несправного модуля розімкнені. Ця конфігурація не відповідає класичній конфігурації зупинки, під час якої К4 залишається замкнутим для підтримки відповідної температури модуля. Після здійснення цього етапу блок обробки інформує про це водія через супервізор зі встановленням зв'язку через першу шину зв'язку транспортного засобу і відновлює нормальну роботу силового контролера, поступово збільшуючи максимальну потужність, що видається модулями. Переважно блок обробки може зберігати в пам'яті інформацію про несправний модуль. Це дозволяє уникати повторного підключення несправного модуля до транспортного засобу під час його наступного запуску. У варіанті виконання блок обробки можна запрограмувати з можливістю визначення категорії аномалії несправного модуля. Зокрема, блок обробки можна запрограмувати так, щоб визначати, чи є аномалія несправного модуля: - полагоджуваною аномалією, наприклад, у разі недостатньої зарядки модуля, або - не полагоджуваною аномалією, наприклад, такою як пошкодження компоненту, що входить до складу несправного модуля. Залежно від категорії аномалії блок обробки може бути запрограмований для здійснення різних дій. Наприклад: 8 UA 115882 C2 5 10 15 20 25 30 35 40 45 50 55 - у разі полагоджуваної аномалії блок обробки може бути запрограмований так, щоб визначати, чи можна знову підключати несправний модуль до транспортного засобу під час його подальшого запуску, - у разі не полагоджуваної аномалії блок обробки може бути запрограмований з можливістю передачі через першу шину зв'язку CAN транспортного засобу інформації, призначеної для користувача і оповіщає його про необхідність направити транспортний засіб на технічне обслуговування. Фахівцеві зрозуміло, що в описані вище спосіб і систему можна вносити різні зміни, не виходячи за рамки описаних відомостей і переваг. Наприклад, блок обробки може бути вбудований в пристрій накопичення електричної енергії або може бути розташований окремо від нього. Так само, цей блок обробки може бути вбудований в супервізор або може бути окремим від нього. З іншого боку, деякі функції, обробки, що реалізовуються блоком, можна здійснювати в силовому контролері. ФОРМУЛА ВИНАХОДУ 1. Спосіб керування роботою електричного живлення транспортного засобу (3) з електричним двигуном, що містить принаймні два паралельно сполучених модулі (11) накопичення енергії, при цьому зазначені модулі виконані з можливістю забезпечувати двигуну видавану електричну потужність в межах між заздалегідь визначеною максимальною потужністю і заздалегідь визначеною мінімальною потужністю, який відрізняється тим, що містить наступні етапи: виявлення (100, 110) аномалії в роботі принаймні одного несправного модуля, за допомогою блока (2) обробки, управління блоком обробки так, щоб блок обробки управляв силовим контролером для пониження (120, 130) максимальної потужності, що видається модулями в електричний двигун, зберігаючи при цьому вказану максимальну потужність, чітко вище нульової потужності, електричне відключення (140) кожного несправного модуля після пониження максимальної потужності за допомогою силового контролера, причому транспортний засіб містить силовий контролер, який дозволяє контролювати потужність, що видається модулями (11), залежно від потужності, яку запитав користувач транспортного засобу, при цьому максимальна потужність відповідає пороговій потужності контролера, причому цей силовий контролер містить конденсатор, що встановлений паралельно з варіатором для зміни потужності, що видається електричному двигуну, і блок обробки для здійснення діагностики модулів накопичення енергії і управління силовим контролером. 2. Спосіб керування за п. 1, який відрізняється тим, що етап пониження максимальної потужності включає підетапи, на яких: подають команду на пониження максимальної потужності, яку можуть видавати модулі, потім вичікують заздалегідь визначений період часу, перш ніж здійснити етап відключення. 3. Спосіб за п. 1, який відрізняється тим, що етап пониження максимальної потужності включає підетапи, на яких: подають команду на пониження максимальної потужності, яку можуть видавати модулі, потім прочитують принаймні один параметр, пов'язаний з потужністю двигуна, перевіряють, щоб зазначений принаймні один параметр відповідав критерію пониження потужності: якщо зазначений параметр пониження потужності дотриманий, здійснюють етап відключення, якщо немає, то повертаються на етап визначення зазначеного принаймні одного параметра, пов'язаного з потужністю двигуна. 4. Спосіб керування за будь-яким з пп. 1-3, який відрізняється тим, що етап виявлення включає для кожного модуля наступні підетапи: прочитують (100) принаймні один параметр, що відображає характеристики даного модуля, і принаймні для одного параметра порівнюють (110) значення параметра принаймні з одним заздалегідь визначеним пороговим значенням для ідентифікації можливої аномалії в роботі даного модуля. 5. Спосіб керування за будь-яким з пп. 1-4, який відрізняється тим, що додатково містить етап (160), на якому блок обробки управляє силовим контролером для підвищення максимальної потужності, яку можуть видавати модулі, при цьому зазначений етап підвищення здійснюють після етапу відключення. 9 UA 115882 C2 5 10 15 20 25 30 35 40 6. Спосіб керування за будь-яким з пп. 1-5, який відрізняється тим, що додатково містить етап передачі тривожного сигналу в звуковий або візуальний сигнальний прилад транспортного засобу для сповіщення користувача про аномалію та/або відключення. 7. Спосіб керування за будь-яким з пп. 1-6, який відрізняється тим, що етап пониження максимальної потужності полягає в безперервному пониженні максимальної потужності, яку можуть видавати модулі так, щоб зміна максимальної потужності була поступовою, зокрема лінійною. 8. Спосіб керування за будь-яким з пп. 1-7, який відрізняється тим, що додатково містить етап вичікування протягом заздалегідь визначеного часу між етапом виявлення і етапом пониження. 9. Спосіб керування за будь-яким з пп. 1-8, який відрізняється тим, що під час принаймні одного запуску транспортного засобу додатково містить етап попереднього навантаження силового контролера, при цьому зазначений етап попереднього навантаження включає електричне підключення силового контролера до даного модуля так, щоб підвищити напругу на клемах силового контролера перед його підключенням до всіх модулів. 10. Спосіб керування за п. 9, який відрізняється тим, що етап попереднього навантаження включає підетап, на якому вибирають різний заданий модуль при кожному запуску транспортного засобу (3). 11. Спосіб керування за п. 10, який відрізняється тим, що перед підетапом вибору різного даного модуля етап попереднього навантаження включає підетап, на якому визначають групу несправних модулів, виявлених під час попереднього запуску транспортного засобу, при цьому підетап вибору полягає у виборі даного модуля серед модулів, що не входять до групи виявлених несправних модулів. 12. Спосіб керування за будь-яким з пп. 1-11, який відрізняється тим, що принаймні один модуль накопичення енергії містить множину послідовно сполучених елементів батареї. 13. Система керування роботою електричного живлення транспортного засобу (3) з електричним двигуном (4),що містить принаймні два паралельно сполучених модулі (11) накопичення енергії, при цьому зазначені модулі виконані з можливістю забезпечувати двигуну видавану електричну потужність в межах між заздалегідь визначеною максимальною потужністю і заздалегідь визначеною мінімальною потужністю, яка відрізняється тим, що містить: блок (2) обробки для виявлення аномалії в роботі принаймні одного несправного модуля і відключення кожного несправного модуля, силовий контролер, який дозволяє контролювати потужність, що видається модулями (11), залежно від потужності, яку запитав користувач транспортного засобу, при цьому максимальна потужність відповідає пороговій потужності контролера, причому цей силовий контролер містить конденсатор, що встановлений паралельно з варіатором для зміни потужності, що видається електричному двигуну, при цьому блок (2) обробки виконаний з можливістю управління силовим контролером для пониження максимальної потужності, що видається модулями в електричний двигун, зберігаючи при цьому вказану максимальну потужність чітко вище за нульову потужність. 10 UA 115882 C2 11 UA 115882 C2 12 UA 115882 C2 13 UA 115882 C2 Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 14
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for managing electrical energy storage assemblies for electrical power supply of an electric motor vehicle
Автори англійськоюJestin, Jean-Jacques, Colin, Jacques
Автори російськоюЖестэн Жан-Жак, Колен Жак
МПК / Мітки
МПК: H02J 7/00, H02J 7/02, B60L 11/18, B60L 3/00, B60L 3/04
Мітки: живлення, керування, електромобіля, пристрій, накопичувачами, силового, енергії, спосіб, електричної
Код посилання
<a href="https://ua.patents.su/16-115882-sposib-ta-pristrijj-dlya-keruvannya-nakopichuvachami-elektrichno-energi-dlya-silovogo-zhivlennya-elektromobilya.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для керування накопичувачами електричної енергії для силового живлення електромобіля</a>
Пристрій системи керування та моніторингу споживачів електричної енергії
Номер патенту: 72128
Опубліковано: 10.08.2012
Автори: Соколенко Богдан Валентинович, Полєтаєв Дмитро Олександрович, Дячук Владислав Сергійович, Таратухін Олександр Олександрович
МПК: G01R 11/00, H02J 3/00, G01R 19/25
Мітки: системі, пристрій, моніторингу, енергії, електричної, споживачів, керування
Формула / Реферат:
Пристрій системи керування та моніторингу споживачів електричної енергії, що містить блок керування, який відрізняється тим, що додатково містить пристрій комутації споживачів електричної енергії, датчики струму та фази, датчик напруги, додаткові датчики, модуль прийому/передачі даних, енергонезалежну пам'ять, причому блок керування підключений до пристрою комутації споживачів електричної енергії, модуля прийому/передачі даних та...
Спосіб живлення споживачів електричної енергії від централізованої енергосистеми і відновлюваних джерел енергії
Номер патенту: 71470
Опубліковано: 10.07.2012
Автори: Сіріков Олександр Іванович, Кубкін Максим Володимирович, Солдатенко Валентин Петрович
МПК: H02J 3/00
Мітки: відновлюваних, споживачів, електричної, спосіб, енергії, живлення, централізовано, енергосистеми, джерел
Формула / Реферат:
Спосіб живлення споживачів електричної енергії від централізованої енергосистеми і відновлюваних джерел енергії, який полягає у тому, що споживачі живляться від централізованої енергосистеми та відновлюваних джерел енергії, які працюють паралельно, який відрізняється тим, що відновлювані джерела енергії підключені до однієї системи шин, централізована енергосистема підключена до другої системи шин, а споживачі електричної енергії за...
Пристрій з автоматизованою системою керування для індивідуальної системи опалення за допомогою перетворення електричної енергії в теплову енергію теплоносія зі зменшенням електричної потужності нагрівача теплон
Номер патенту: 39255
Опубліковано: 25.02.2009
Автор: Панченко Ігор Володимирович
МПК: F24D 15/00, F24D 10/00, F24H 7/00
Мітки: теплоносія, системою, енергію, системі, керування, опалення, перетворення, пристрій, потужності, зменшенням, нагрівача, індивідуальної, енергії, теплову, допомогою, автоматизованою, електричної, теплон
Формула / Реферат:
Пристрій з автоматизованою системою керування для індивідуального опалення приміщень за допомогою перетворення електричної енергії в теплову енергію теплоносія зі зменшенням електричної потужності нагрівача теплоносія, який відрізняється тим, що для реалізації можливості примусової, рівномірної циркуляції теплоносія; контролю та підтримки тиску теплоносія; реалізації функції використання накопиченої енергії теплоносія для відновлення...
Пристрій безтрансформаторного підвищення напруги живлення для електрифікованих видів транспорту з накопичувачами електроенергії
Номер патенту: 116535
Опубліковано: 25.05.2017
Автори: Ільченко Роман Анатолійович, Козакевич Ігор Аркадійович, Сінчук Олег Миколайович
МПК: B60R 16/00, H02M 1/00
Мітки: живлення, безтрансформаторного, транспорту, видів, електроенергії, накопичувачами, напруги, електрифікованих, підвищення, пристрій
Формула / Реферат:
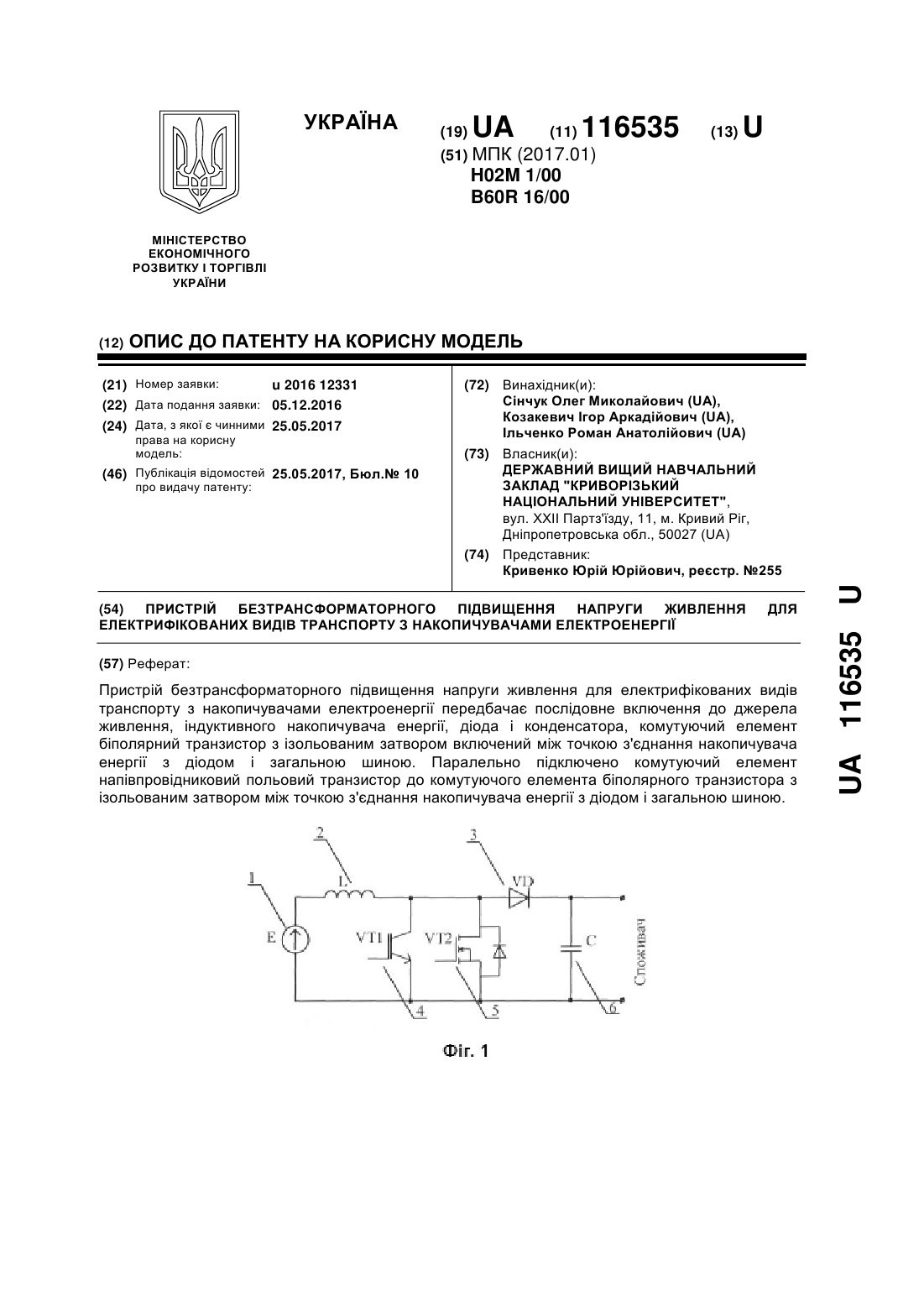
Пристрій безтрансформаторного підвищення напруги живлення для електрифікованих видів транспорту з накопичувачами електроенергії, що передбачає послідовне включення до джерела живлення, індуктивного накопичувача енергії, діода і конденсатора, комутуючий елемент біполярний транзистор з ізольованим затвором включений між точкою з'єднання накопичувача енергії з діодом і загальною шиною, який відрізняється тим, що паралельно підключено комутуючий...
Пристрій для контролю обсягів та якості потоку електричної енергії у точці електричної мережі
Номер патенту: 116939
Опубліковано: 12.06.2017
Автори: Бялобржеський Олексій Володимирович, Евтушенко Любов Геннадіївна, Теріхов Ілля Сергійович
МПК: G01R 21/133
Мітки: електричної, енергії, якості, точці, контролю, мережі, потоку, пристрій, обсягів
Формула / Реферат:
Пристрій для контролю обсягів та якості потоку електричної енергії у точці електричної мережі, що містить мережу, з'єднану шиною зі споживачем з блоком датчиків струму, який відрізняється тим, що приєднаний ввідний вимикач, який з'єднаний з трансформатором, а той у свою чергу з'єднаний з першим вимикачем, перший вимикач шиною з'єднаний з другим вимикачем, який з'єднаний зі споживачем, перший вимикач шиною з'єднаний з блоком датчиків напруги,...