Система приведення до руху за допомогою рідкого середовища для прискорення, а також керування спрямуванням рідкого середовища (варіанти)
Формула / Реферат
1. Система приведення до руху за допомогою рідкого середовища для прискорення, а також керування спрямуванням рідкого середовища, що містить:
безперервну динамічну поверхню для циркуляції через рідке середовище від зони забору, де рідке середовище підводять до динамічної поверхні, після чого рідке середовище поблизу від поверхні прискорюється так, щоб створити шар прискореного рідкого середовища через зону тяги, де прискорене рідке середовище відводять від динамічної поверхні,
двигун, оперативно з'єднаний з динамічною поверхнею для приведення її до руху, і рухому сепараторну пластину, яка відрізняється тим, що сепараторна пластина має передню кромку для відділення прискореного рідкого середовища в шарі від динамічної поверхні, і фактично плоску напірну поверхню, що прилягає до передньої кромки, для надання прискореному рідкому середовищу бажаного спрямування, щоб створити потік, що забезпечує тягу, при цьому сепараторна пластина має можливість переміщення по відношенню до динамічної поверхні, так що передня кромка загалом перебуває в безпосередній близькості від динамічної поверхні, а напірна поверхня загалом фактично є тангенціальною щодо динамічної поверхні вздовж першої дотичної до динамічної поверхні в першому положенні і вздовж другої дотичної до динамічної поверхні в другому положенні, при цьому в першому і другому положеннях потік, що забезпечує тягу, спрямований відповідно вздовж першого і другого векторів.
2. Система приведення до руху за п. 1, яка відрізняється тим, що безперервна динамічна поверхня містить циліндр, що обертається.
3. Система приведення до руху за п. 1, яка відрізняється тим, що вона містить рухому стрічку, що обвивається навколо двох роликів, при цьому стрічку приводить до руху щонайменше один з роликів, а щонайменше частина поверхні стрічки утворює безперервну динамічну поверхню.
4. Система приведення до руху за п. 1 або 2, яка відрізняється тим, що вона додатково містить забірник, розташований біля забірної зони для спрямування додаткового рідкого середовища до циліндра.
5. Система приведення до руху за п. 4, яка відрізняється тим, що забірник містить криволінійний лист, прикріплений до сепараторної пластини, при цьому криволінійний лист проходить навколо частини циліндра від сепараторної пластини до забірної зони.
6. Система приведення до руху за п. 4, яка відрізняється тим, що забірник виконаний з можливістю обертання навколо циліндра.
7. Система приведення до руху за п. 4, яка відрізняється тим, що забірних додатково містить безліч частин, що мають в собі криволінійний лист і зовнішній лист, розташований зовні криволінійного листа.
8. Система приведення до руху за п. 7, яка відрізняється тим, що криволінійний лист і зовнішній лист перекривають один одного вздовж зони, що йде фактично паралельно осі обертання циліндра.
9. Система приведення до руху за п. 7, яка відрізняється тим, що листи містять безліч частин, які відділені одна від одної вздовж межі, фактично перпендикулярної осі обертання циліндра.
10. Система приведення до руху за п. 1, яка відрізняється тим, що вона додатково містить ребро, прикріплене до динамічної поверхні, при цьому ребро розміщене перпендикулярно динамічній поверхні і паралельно потоку прискореного рідкого середовища.
11. Система приведення до руху за п. 1, яка відрізняється тим, що сепараторну пластину можна регулювати, між положенням відділення, в якому передня кромка перебуває в безпосередній близькості від динамічної поверхні, і вивільненим положенням, в якому передня кромка відведена від динамічної поверхні, фактично перебуваючи поза шаром прискореного рідкого середовища.
12. Система приведення до руху за п. 11, яка відрізняється тим, що передня кромка має перший і другий кінець, при цьому передня кромка має можливість кутового регулювання по відношенню до динамічної поверхні, так що один з кінців пребуває в безпосередній близькості від динамічної поверхні в положенні відділення, а інший кінець щонайменше частково відведений по поверхні.
13. Система приведення до руху за п. 1, яка відрізняється тим, що сепараторна пластина містить більшу кількість частин, при цьому кожна частина має передню кромку і напірну поверхню, причому частини можуть бути індивідуально розміщені по відношенню до динамічної поверхні, з тим, щоб спрямовувати прискорене рідке середовище в безліч напрямків.
14. Система приведення до руху за п. 13, яка відрізняється тим, що кожна передня кромка має можливість регулювання між положенням відділення, в якому передня кромка перебуває в безпосередній близькості від динамічної поверхні, і відведеним положенням, в якому передня кромка відведена від динамічної поверхні, фактично перебуваючи поза шаром прискореного рідкого середовища.
15. Система приведення до руху за п. 13, яка відрізняється тим, що кожна передня кромка має перший кінець і другий кінець, при цьому передні кромки мають можливість кутового регулювання по відношенню до динамічної поверхні, так що один з кінців перебуває в безпосередній близькості від динамічної поверхні в положенні відділення, а їхній інший кінець щонайменше частково відведений від поверхні.
16. Система приведення до руху за п. 1, яка відрізняється тим, що вона містить сепараторну пластину зворотного потоку, розташовану в забірній зоні, при цьому пластина зворотного потоку має можливість переміщення між положенням зачеплення і відведеним положенням, причому пластина зворотного потоку відділяє прискорене рідке середовище від динамічної поверхні і надає йому зворотного напряму в положенні зачеплення, і відходить від прискореного рідкого середовища у відведеному положенні.
17. Система приведення до руху за п. 2, яка відрізняється тим, що вона додатково містить безліч циліндрів, при цьому кожний циліндр має щонайменше одну відповідну сепараторну пластину, розташовану в його зоні тяги, причому циліндри розміщені на відстані один від одного, так що кожна сепараторна пластина перебуває поблизу від іншої сепараторної пластини.
18. Система приведення до руху за п. 17, яка відрізняється тим, що циліндри розміщені протилежними парами для утворення забірної зони сходження між циліндрами, при цьому кожний циліндр розміщений фактично паралельно протилежному йому циліндру, а кожна сепараторна пластина розміщена в зоні сходження протилежно щонайменше одній іншій сепараторній пластині.
19. Система приведення до руху за п. 17, яка відрізняється тим, що кожна сепараторна пластина може бути розміщена біля відповідного їй циліндра.
20. Система приведення до руху за п. 17, яка відрізняється тим, що кожна сепараторна пластина має безліч частин, при цьому кожна частина може бути розміщена біля відповідного циліндра.
21. Система приведення до руху за п. 1, яка відрізняється тим, що швидкість динамічної поверхні може змінюватися.
22. Система приведення до руху за допомогою рідкого середовища для прискорення, а також керування спрямуванням рідкого середовища, що містить:
безліч циліндрів, при цьому кожний циліндр містить зовнішню поверхню, що має можливість обертання через рідке середовище від забірної зони, де рідке середовище підводять до зовнішньої поверхні, після чого рідке середовище поблизу від зовнішньої поверхні прискорюється для створення шару прискореного рідкого середовища через зону тяги, де рідке середовище відводять від зовнішньої поверхні,
двигун, оперативно підключений до циліндрів для обертання, і
безліч сепараторних пластин, що забезпечують тягу, яка відрізняється тим, що
циліндри відстоять один від одного для утворення забірної зони сходження між циліндрами, причому циліндри мають можливість обертання всередину до зони сходження, так що прискорене рідке середовище від кожного циліндра проходить через зону сходження між циліндрами в бажаному спрямуванні тяги, а
кожна сепараторна пластина має передню кромку і напірну поверхню, при цьому кожний циліндр має щонайменше одну відповідну сепараторну пластину, розташовану в його зоні тяги, а кожна сепараторна пластина може бути розміщеною в зоні сходження і рухомою по відношенню до відповідного їй циліндра.
23. Система приведення до руху за допомогою рідкого середовища за п. 22, яка відрізняється тим, що вона містить в собі два циліндри, розташованих фактично паралельно один одному.
24. Система приведення до руху за допомогою рідкого середовища за п. 22, яка відрізняється тим, що вона додатково містить забірник, підключений до кожного циліндра, при цьому кожний забірник розміщений загалом протилежно забірній зоні сходження.
25. Система приведення до руху за допомогою рідкого середовища за п. 22, яка відрізняється тим, що вона містить в собі щонайменше три циліндри.
26. Система приведення до руху за допомогою рідкого середовища за п. 22, яка відрізняється тим, що швидкість кожного циліндра можна змінити і регулювати незалежно від інших циліндрів.
Текст
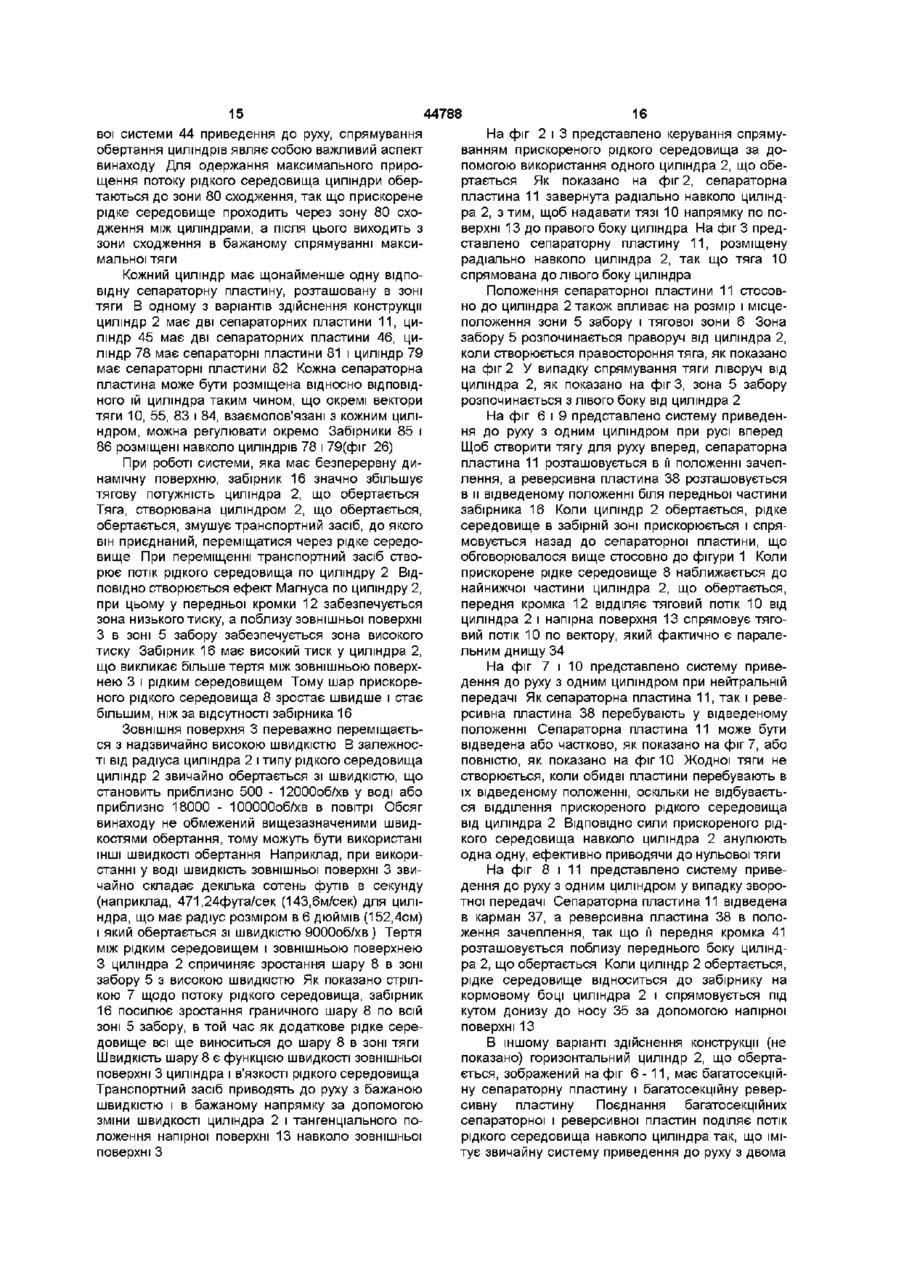
1 Система приведення до руху за допомогою рідкого середовища для прискорення, а також керування спрямуванням рідкого середовища, що містить безперервну динамічну поверхню для циркуляції через рідке середовище від зони забору, де рідке середовище підводять до динамічної поверхні, після чого рідке середовище поблизу від поверхні прискорюється так, щоб створити шар прискореного рідкого середовища через зону тяги, де прискорене рідке середовище відводять від динамічної поверхні, двигун, оперативно з'єднаний з динамічною поверхнею для приведення її до руху, і рухому сепараторну пластину, яка відрізняється тим, що сепараторна пластина має передню кромку для відділення прискореного рідкого середовища в шарі від динамічної поверхні, і фактично плоску напірну поверхню, що прилягає до передньої кромки, для надання прискореному рідкому середовищу бажаного спрямування, щоб створити потік, що забезпечує тягу, при цьому сепараторна пластина має можливість переміщення по відношенню до динамічної поверхні, так що передня кромка загалом перебуває в безпосередній близькості від динамічної поверхні, а напірна поверхня загалом фактично є тангенціальною щодо динамічної поверхні вздовж першої дотичної до динамічної поверхні в першому положенні і вздовж другої дотичної до динамічної поверхні в другому положенні, при цьому в першому і другому положеннях потік, що забезпечує тягу, спрямований ВІДПОВІДНО вздовж першого і другого векторів 2 Система приведення до руху за п 1, яка відрізняється тим, що безперервна динамічна поверхня містить циліндр, що обертається 3 Система приведення до руху за п 1, яка відрізняється тим, що вона містить рухому стрічку, що обвивається навколо двох роликів, при цьому стрічку приводить до руху щонайменше один з роликів, а щонайменше частина поверхні стрічки утворює безперервну динамічну поверхню 4 Система приведення до руху за п 1 або 2, яка відрізняється тим, що вона додатково містить забірник, розташований біля забірної зони для спрямування додаткового рідкого середовища до циліндра 5 Система приведення до руху за п 4, яка відрізняється тим, що забірник містить криволінійний лист, прикріплений до сепараторної пластини, при цьому криволінійний лист проходить навколо частини циліндра від сепараторної пластини до забірної зони 6 Система приведення до руху за п 4, яка відрізняється тим, що забірник виконаний з можливістю обертання навколо циліндра 7 Система приведення до руху за п 4, яка відрізняється тим, що забірних додатково містить безліч частин, що мають в собі криволінійний лист і ЗОВНІШНІЙ лист, розташований зовні криволінійного листа 8 Система приведення до руху за п 7, яка відрізняється тим, що криволінійний лист і ЗОВНІШНІЙ лист перекривають один одного вздовж зони, що йде фактично паралельно осі обертання циліндра 9 Система приведення до руху за п 7, яка відрізняється тим, що листи містять безліч частин, які відділені одна від одної вздовж межі, фактично перпендикулярної осі обертання циліндра 10 Система приведення до руху за п 1, яка відрізняється тим, що вона додатково містить ребро, прикріплене до динамічної поверхні, при цьому ребро розміщене перпендикулярно динамічній поверхні і паралельно потоку прискореного рідкого середовища 11 Система приведення до руху за п 1, яка відрізняється тим, що сепараторну пластину можна регулювати, між положенням відділення, в якому передня кромка перебуває в безпосередній близькості від динамічної поверхні, і вивільненим положенням, в якому передня кромка відведена від динамічної поверхні, фактично перебуваючи поза О 00 00 44788 шаром прискореного рідкого середовища 12 Система приведення до руху за п 11, яка відрізняється тим, що передня кромка має перший і другий кінець, при цьому передня кромка має можливість кутового регулювання по відношенню до динамічної поверхні, так що один з КІНЦІВ пребуває в безпосередній близькості від динамічної поверхні в положенні відділення, а інший кінець щонайменше частково відведений по поверхні 13 Система приведення до руху за п 1, яка відрізняється тим, що сепараторна пластина містить більшу КІЛЬКІСТЬ частин, при цьому кожна частина має передню кромку і напірну поверхню, причому частини можуть бути індивідуально розміщені по відношенню до динамічної поверхні, з тим, щоб спрямовувати прискорене рідке середовище в безліч напрямків 14 Система приведення до руху за п 13, яка відрізняється тим, що кожна передня кромка має можливість регулювання між положенням відділення, в якому передня кромка перебуває в безпосередній близькості від динамічної поверхні, і відведеним положенням, в якому передня кромка відведена від динамічної поверхні, фактично перебуваючи поза шаром прискореного рідкого середовища 15 Система приведення до руху за п 13, яка відрізняється тим, що кожна передня кромка має перший кінець і другий кінець, при цьому передні кромки мають можливість кутового регулювання по відношенню до динамічної поверхні, так що один з КІНЦІВ перебуває в безпосередній близькості від динамічної поверхні в положенні відділення, а їхній інший кінець щонайменше частково відведений від поверхні 16 Система приведення до руху за п 1, яка відрізняється тим, що вона містить сепараторну пластину зворотного потоку, розташовану в забірній зоні, при цьому пластина зворотного потоку має можливість переміщення між положенням зачеплення і відведеним положенням, причому пластина зворотного потоку ВІДДІЛЯЄ прискорене рідке середовище від динамічної поверхні і надає йому зворотного напряму в положенні зачеплення, і відходить від прискореного рідкого середовища у відведеному положенні 17 Система приведення до руху за п 2, яка відрізняється тим, що вона додатково містить безліч циліндрів, при цьому кожний циліндр має щонайменше одну відповідну сепараторну пластину, розташовану в його зоні тяги, причому циліндри розміщені на відстані один від одного, так що кожна сепараторна пластина перебуває поблизу від іншої сепараторної пластини 18 Система приведення до руху за п 17, яка відрізняється тим, що циліндри розміщені протилежними парами для утворення забірної зони сходження між циліндрами, при цьому кожний циліндр розміщений фактично паралельно протилежному йому циліндру, а кожна сепараторна пластина розміщена в зоні сходження протилежно щонай менше одній ІНШІЙ сепараторній пластині 19 Система приведення до руху за п 17, яка відрізняється тим, що кожна сепараторна пластина може бути розміщена біля ВІДПОВІДНОГО їй циліндра 20 Система приведення до руху за п 17, яка відрізняється тим, що кожна сепараторна пластина має безліч частин, при цьому кожна частина може бути розміщена біля ВІДПОВІДНОГО циліндра 21 Система приведення до руху за п 1, яка відрізняється тим, що швидкість динамічної поверхні може змінюватися 22 Система приведення до руху за допомогою рідкого середовища для прискорення, а також керування спрямуванням рідкого середовища, що містить безліч циліндрів, при цьому кожний циліндр містить зовнішню поверхню, що має можливість обертання через рідке середовище від забірної зони, де рідке середовище підводять до зовнішньої поверхні, після чого рідке середовище поблизу від зовнішньої поверхні прискорюється для створення шару прискореного рідкого середовища через зону тяги, де рідке середовище відводять від зовнішньої поверхні, двигун, оперативно підключений до циліндрів для обертання,і безліч сепараторних пластин, що забезпечують тягу, яка відрізняється тим, що циліндри відстоять один від одного для утворення забірної зони сходження між циліндрами, причому циліндри мають можливість обертання всередину до зони сходження, так що прискорене рідке середовище від кожного циліндра проходить через зону сходження між циліндрами в бажаному спрямуванні тяги, а кожна сепараторна пластина має передню кромку і напірну поверхню, при цьому кожний циліндр має щонайменше одну відповідну сепараторну пластину, розташовану в його зоні тяги, а кожна сепараторна пластина може бути розміщеною в зоні сходження і рухомою по відношенню до ВІДПОВІДНОГО їй циліндра 23 Система приведення до руху за допомогою рідкого середовища за п 22, яка відрізняється тим, що вона містить в собі два циліндри, розташованих фактично паралельно один одному 24 Система приведення до руху за допомогою рідкого середовища за п 22, яка відрізняється тим, що вона додатково містить забірник, підключений до кожного циліндра, при цьому кожний забірник розміщений загалом протилежно забірній зоні сходження 25 Система приведення до руху за допомогою рідкого середовища за п 22, яка відрізняється тим, що вона містить в собі щонайменше три циліндри 26 Система приведення до руху за допомогою рідкого середовища за п 22, яка відрізняється тим, що швидкість кожного циліндра можна змінити і регулювати незалежно від інших циліндрів 44788 Винахід відноситься до транспортних засобів, зокрема - до систем приведення до руху за допомогою рідкого середовища і особливо стосується таких систем, що застосовуються для прискорення і керування спрямуванням рідкого середовища з використанням безперервної динамічної поверхні, наприклад, високошвидкісного обертального циліндра або високошвидкісної рухомої стрічки Літаки, кораблі, судна на повітряній подушці та ІНШІ транспортні засоби приводять до руху за допомогою прискорення рідкого середовища для створення тяги Тяга забезпечує зусилля, яке приводить до руху транспортний засіб у напрямку, протилежному напрямку тяги Звичайні системи приведення до руху більшою частиною містять в собі повітряні або гребні гвинти, або турбіни Системи приведення до руху, що містять повітряні або гребні гвинти, широко використовуються стосовно до літаків і кораблів Однак, гвинти відносно неефективні через те, що значна КІЛЬКІСТЬ рідкого середовища спрямовується радіальне назовні в бік від бажаного напрямку тяги ВІДПОВІДНО гвинти вхолосту витрачають енергію на рідке середовище, так що лише незначно збільшують тягову потужність При роботі у воді гвинти також піддаються кавітації, що значно знижує їх ефективність Інша проблема, що стосується гвинтів, полягає в тому, що вони створюють небезпеку, призводячи до серйозних поранень і навіть загибелі людей або тварин, які стикаються з гвинтами під час їхнього обертання І, зрештою, повітряні гвинти створюють надто сильний шум, що призводить до значних незручностей для населення навколо аеропортів Для приведення до руху літаків широко використовують турбіни Однак турбіни мають обмежене застосування внаслідок того, що вони надто дороги і створюють сильний шум Крім того, турбіни працюють у випадку рідких середовищ з високою ЩІЛЬНІСТЮ, наприклад,, води У СВІТЛІ проблем, притаманних гвинтам і турбінам, бажано розробити систему приведення до руху, яка є ефективною, безпечною, безшумною, і може широко застосовуватися для наземних, морських і повітряних транспортних засобів Однією З альтернативних систем приведення до руху є циліндр, що обертається Попередні винаходи, що стосуються високошвидкісних циліндрів, що обертаються, звичайно сфокусовані на використанні циліндрів в потоці рідкого середовища для забезпечення підйому згідно з ефектом Магнуса Хоча такі види застосування швидкісного циліндра, що обертається, і корисні для забезпечення підйому, вони не відносяться до використання швидкісного циліндра, що обертається, для створення сили тяги в статичному рідкому середовищі До нинішнього часу циліндри, що обертаються, не знаходили широкого застосування як системи приведення до руху за допомогою рідкого середовища Коли циліндр обертається в рідкому середовищі, тертя між циліндром і рідким середовищем викликає винесення частини рідкого середовища в шар навколо циліндра Звичайні системи приведення до руху, в яких використовуються ци ліндри, що обертаються, не створюють достатньої тяги без значного збільшення фізичних розмірів даного транспортного засобу, наприклад,, розмаху крила (у літаків) або ширини (у суден або теліжок) Таким чином до нинішнього часу циліндри, що обертаються, практично не використовувалися на повногабаритних літаках, кораблях, суднах на повітряній подушці та інших транспортних засобах Одна з систем приведення до руху, в якій використовуються циліндри, що обертаються, показана в патенті США №2985406, кп 244 - 10, 1961 Система включає два циліндри, що обертаються, ДІЮЧІ як засоби приведення до руху і підйому літака Циліндри розміщені фактично паралельно один одному і обертаються у напрямку один до одного, так що повітря тече навколо циліндрів і сходиться у задній частині циліндрів Повітря спочатку виноситься з простору між циліндрами і спрямовується навколо зовнішньої сторони циліндрів При безперешкодному виході напрямок прискореного рідкого середовища в просторі між циліндрами загалом був би протилежним бажаному напрямку максимальної тяги Для належного спрямування прискорення рідкого середовища в задній частині циліндрів розраховано відбивач, який ВІДДІЛЯЄ прискорене повітря від циліндрів і відхиляє його на 90° для надання бажаного напрямку Система приведення до руху з обертальними циліндрами має багато переваг у порівнянні з гвинтами і турбінами По-перше, такі системи є безпечними порівняно з гвинтами, оскільки вони не мають лопатей і створюють шар нев'язкого потоку рідкого середовища поблизу циліндра, який звичайно відвертає реальний контакт об'єкту з поверхнею циліндра Крім того, обертальні циліндри є надто малошумними і в рівній мірі застосовуються для роботи в повітрі або у воді В основу винаходу поставлено задачу розробити ефективну та гнучку систему приведення до руху за допомогою рідкого середовища для прискорення , а також керування спрямуванням рідкого середовища, у якій завдяки відділенню прискореного рідкого середовища від динамічної поверхні вздовж вектора, який є тангенціальним щодо поверхні та зважаючи на наявність фактично плоскої напірної поверхні зводиться до мінімуму втрати енергії водночас с посиленням тяги у бажаному спрямуванні Поставлена задача вирішена тим, що в системі приведення до руху за допомогою рідкого середовища для прискорення а також керування спрямуванням рідкого середовища згідно з винаходом в ній міститься безперервна динамічна поверхня для циркуляції через рідке середовище від зони забору, де рідке середовище підводять до динамічної поверхні, після чого рідке середовище поблизу від поверхні прискорюється так, щоб створити шар прискореного рідкого середовища через зону тяги, де прискорене рідке середовище відводять від динамічної поверхні, двигун, оперативно з'єднаний з динамічною поверхнею для приведення її до руху, рухома сепараторна пластина, що має передню кромку для відділення прискореного рідкого середовища в шарі від динамічної поверхні, і фактично плоску напірну поверхню, що прилягає 8 44788 тини можуть бути індивідуально розміщені по віддо передньої кромки, для надання прискореному ношенню до динамічної поверхні, з тим, щоб рідкому середовищу бажаного спрямування, щоб спрямовувати прискорене рідке середовище в створити потік, що забезпечує тягу, при цьому себезліч напрямків параторна пластина має можливість переміщення При цьому кожна передня кромка має можлипо відношенню до динамічної поверхні, так що вість регулювання між положенням відділення, в передня кромка загалом перебуває в безпосередякому передня кромка перебуває в безпосередній ній близькості від динамічної поверхні, а напірна близькості від динамічної поверхні, і відведеним поверхня загалом фактично є тангенціальною щоположенням, в якому передня кромка відведена до динамічної поверхні вздовж першої дотичної до від динамічної поверхні, фактично перебуваючи динамічної поверхні в першому положенні і вздовж поза шаром прискореного рідкого середовища другої дотичної до динамічної поверхні в другому положенні, при цьому в першому і другому полоПереважно кожна передня кромка повинна женнях потік, що забезпечує тягу, спрямований мати перший кінець і другий кінець, при цьому пеВІДПОВІДНО вздовж першого і другого векторів редні кромки мають можливість кутового регулювання по відношенню до динамічної поверхні, так В одному з варіантів виконання винаходу безщо один з КІНЦІВ перебуває в безпосередній близьперервна динамічна поверхня містить циліндр, що кості від динамічної поверхні в положенні віддіобертається лення, а їхній інший кінець щонайменше частково В іншому варіанті виконання винаходу передвідведений від поверхні бачається наявність рухомої стрічки, що обвивається навколо двох роликів, при цьому стрічку ВІДПОВІДНО ДО винаходу система містить сепаприводить до руху щонайменше один з роликів, а раторну пластину зворотного потоку, розташовану щонайменше частина поверхні стрічки утворює в забірній зоні, при цьому пластина зворотного безперервну динамічну поверхню потоку має можливість переміщення між положенням зачеплення і відведеним положенням, причоВІДПОВІДНО ДО винаходу в системі додатково му пластина зворотного потоку ВІДДІЛЯЄ прискореміститься забірник, розташований біля забірної не рідке середовище від динамічної поверхні і зони для спрямування додаткового рідкого серенадає йому зворотного напряму в положенні зачедовища до циліндра плення, і відходить від прискореного рідкого сереПереважно в забірнику мати криволінійний довища у відведеному положенні лист, прикріплений до сепараторної пластини, при цьому криволінійний лист проходить навколо часВІДПОВІДНО ДО винаходу передбачається в систини циліндра від сепараторної пластини до забіртемі додатково мати безліч циліндрів, при цьому ної зони кожний циліндр має щонайменше одну відповідну сепараторну пластину, розташовану в його зоні Переважно також забірник виконати з можлитяги, причому циліндри розміщені на відстані один вістю обертання навколо циліндра При цьому в від одного, так що кожна сепараторна пластина забірнику необхідно мати безліч частин, що мають перебуває поблизу від іншої сепараторної пластив собі криволінійний лист і ЗОВНІШНІЙ лист, розтани При цьому циліндри можуть бути розміщені шований зовні криволінійного листа При цьому протилежними парами для утворення забірної зокриволінійний лист і ЗОВНІШНІЙ лист перекривають ни сходження між циліндрами так, що кожний циодин одного вздовж зони, що йде фактично параліндр розміщений фактично паралельно протилелельно осі обертання циліндра Передбачено, що жному йому циліндру, а кожна сепараторна листи містять безліч частин, які відділені одна від пластина розміщена в зоні сходження протилежно одної вздовж межі, фактично перпендикулярної осі щонайменше одній ІНШІЙ сепараторній пластині обертання циліндра Передбачається, що кожна сепараторна пластина Передбачено додатково мати ребро, прикріпможе бути розміщена біля ВІДПОВІДНОГО їй цилінлене до динамічної поверхні, при цьому ребро дра розміщене перпендикулярно динамічній поверхні і паралельно потоку прискореного рідкого середовища В системі сепараторну пластину можна регулювати, між положенням відділення, в якому передня кромка перебуває в безпосередній близькості від динамічної поверхні, і вивільненим положенням, в якому передня кромка відведена від динамічної поверхні, фактично перебуваючи поза шаром прискореного рідкого середовища ВІДПОВІДНО ДО винаходу передня кромка має перший і другий кінець, при цьому передня кромка має можливість кутового регулювання по відношенню до динамічної поверхні, так що один з КІНЦІВ перебуває в безпосередній близькості від динамічної поверхні в положенні відділення, а інший кінець щонайменше частково відведений по поверхні В системі сепараторна пластина містить більшу КІЛЬКІСТЬ частин, при цьому кожна частина має передню кромку і напірну поверхню, причому час Переважно в кожній сепараторній пластині мати безліч частин, при цьому кожна частина може бути розміщена біля ВІДПОВІДНОГО циліндра ВІДПОВІДНО ДО винаходу швидкість динамічної поверхні може змінюватися Поставлена задача також вирішена тим, що в системі приведення до руху за допомогою рідкого середовища для прискорення а також керування спрямуванням рідкого середовища згідно з винаходом в ній міститься безліч циліндрів, при цьому кожний циліндр містить зовнішню поверхню, що має можливість обертання через рідке середовище від забірної зони, де рідке середовище підводять до зовнішньої поверхні, після чого рідке середовище поблизу від зовнішньої поверхні прискорюється для створення шару прискореного рідкого середовища через зону тяги, де рідке середовище відводять від зовнішньої поверхні, при цьому циліндри відстоять один від одного для утворення забірної зони сходження між циліндра 44788 ми, причому циліндри мають можливість обертання всередину до зони сходження, так що прискорене рідке середовище від кожного циліндра проходить через зону сходження між циліндрами в бажаному спрямуванні тяги, двигун, оперативно підключений до циліндрів для обертання, безліч сепараторних пластин, що забезпечують тягу, кожна з яких має передню кромку і напірну поверхню, при цьому кожний циліндр має щонайменше одну відповідну сепараторну пластину, розташовану в його зоні тяги, а кожна сепараторна пластина може бути розміщеною в зоні сходження і рухомою по відношенню до ВІДПОВІДНОГО їй циліндра Переважно в системі мати два циліндри, розташованих фактично паралельно один одному ВІДПОВІДНО ДО винаходу в системі додатково міститься забірник, підключений до кожного циліндра, при цьому кожний забірник розміщений загалом протилежно забірній зоні сходження Один з варіантів винаходу передбачає мати в системі щонайменше три циліндри ВІДПОВІДНО ДО винаходу швидкість кожного циліндра можна змінювати і регулювати незалежно від інших циліндрів Нижче винахід більш докладно пояснюється на прикладах його здійснення з посиланням на креслення, на яких На фіг 1 представлено вигляд в поперечному розрізі системи приведення до руху за допомогою рідкого середовища з циліндром, що швидко обертається, виконаної згідно з винаходом На фіг 2 представлено інший вигляд в поперечному розрізі циліндра, що швидко обертається, системи приведення до руху за допомогою рідкого середовища згідно з фіг 1 На фіг 3 представлено ще один вигляд в поперечному розрізі циліндра, що швидко обертається, системи приведення до руху згідно з фіг 1 На фіг 4 представлено вигляд в ізометрії циліндра, що швидко обертається, системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом і маючи безліч сепараторних пластин На фіг 5 представлено вигляд в поперечному розрізі системи приведення до руху згідно з фіг 4 На фіг 6 представлено циліндр, що швидко обертається, системи приведення до руху за допомогою рідкого середовища, виконаний згідно з винаходом і який використовується спільно з плавучим засобом для його руху вперед На фіг 7 представлено циліндр, що швидко обертається, згідно з фіг 6 у випадку нульової тяги На фіг 8 представлено циліндр, що швидко обертається, згідно з фіг 6 при зворотному русі На фіг 9 представлено докладний вигляд в поперечному розрізі циліндра, що швидко обертається, згідно з фіг 6 На фіг 10 представлено докладний вигляд в поперечному розрізі циліндра, що швидко обертається, згідно з фіг 7 На фіг 11 представлено поперечний розріз циліндра, що швидко обертається, згідно з фіг 8 На фіг 12 схематично представлено циліндр, що обертається, і рухому в продольному напрямку 10 сепараторну пластину системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом На фіг 13 представлено циліндр, що обертається, і рухому в радіальному напрямку сепараторну пластину системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом На фіг 14 схематично представлено циліндр, що обертається, і рухому в тангенціальному напрямку сепараторну пластину системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом На фіг 15 представлено циліндр, що обертається, і поворотно рухому сепараторну пластину системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом На фіг 16 схематично представлено циліндр, що обертається, і рухому в кутовому напрямку сепараторну пластину системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом На фіг 17 представлено вигляд в поперечному розрізі двохцилшдрової системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом На фіг 18 представлено вигляд згори двохцилшдрової системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом На фіг 19 представлено вигляд в поперечному розрізі двохцилшдрової системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом, при русі вперед На фіг 20 представлено вигляд в поперечному розрізі двохцилшдрової системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом, при зворотному русі На фіг 21 представлено вигляд в поперечному розрізі двохцилшдрової системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом, яка забезпечує бокову тягу На фіг 22 представлено вигляд в поперечному розрізі двохцилшдрової системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом, яка забезпечує іншу бокову тягу На фіг 23 представлено двохцилшдрову систему приведення до руху за допомогою рідкого середовища, виконану згідно з винаходом і яка використовується для приведення до руху плавучого засобу На фіг 24 представлено вигляд в ізометрії багатоциліндрової системи приведення до руху за допомогою рідкого середовища, виконаної згідно з винаходом На фіг 25 представлено вигляд в ізометрії іншої багатоциліндрової системи приведення до руху, виконаної згідно з винаходом На фіг 26 представлено вигляд в поперечному розрізі А - А багатоциліндрової системи приведення до руху згідно з фіг 24 На фіг 27 представлено вигляд згори багатоциліндрової системи приведення до руху, виконаної згідно з винаходом і яка використовується стосовно до судна на повітряній подушці 11 44788 12 На фіг 28 представлено вигляд в поперечновнянні з лопатями, які не є рівними і не тангенційму розрізі багатоциліндрової системи приведення ні, оскільки напірна поверхня 13 лише зменшує до руху, виконаної згідно з винаходом і яка має енергію обертання рідкого середовища, нерівні і рухомі осі обертання нетангенційні лопаті прагнуть зменшити як енергію обертання, так і лінійну енергію рідкого середовиНа фіг 29 представлено вигляд згори багатоща Сепараторна пластина 11 також може мати циліндрової системи приведення до руху, виконаконтурну поверхню 14 (показано пунктиром), що ної згідно з винаходом і яка має ребра розміщується за напірною поверхнею 13, в більш На фіг ЗО представлено вигляд в поперечноприйнятному варіанті поверхню 13 В більш приму розрізі Б - Б багатоциліндрової системи привейнятному варіанті здійснення конструкції криволідення до руху згідно з фіг 29 нійна внутрішня поверхня 15, що має радіус, який На фіг 31 представлено вигляд в поперечнофактично є таким самим, як і радіус зовнішньої му розрізі системи приведення до руху, виконаної поверхні 3, розміщена з іншого боку пластини 11 згідно з винаходом, в якій динамічна поверхня явпоблизу передньої кромки ляє собою рухому стрічку На фіг 1 - 31 представлені системи приведенЗабірник 16 розміщений навколо частини циня до руху за допомогою рідкого середовища, виліндра 2, щоб спрямувати більшу частину рідкого конані згідно з винаходом і призначені для прискосередовища для контакту з циліндром, а також рення а також керування спрямуванням рідкого відвернути огортання прискореного рідкого сересередовища для створення тяги Для ясності слід довища навколо сепараторної пластини 11 та її вказати, що термін "тяга" загалом використовуєтьповернення до забірної зони 5 В одному з варіанся для означення потоку прискореного рідкого сетів здійснення конструкції забірник 16 виконаний у редовища в даному напрямку, а термін "підйом" вигляді криволінійного листа 17, що приєднаний загалом використовується для означення вертидо віддаленого кінця сепараторної пластини 11 і кально спрямованої тяги На різних фігурах для проходить навколо частини циліндра 2 В іншому позначки однакових деталей використані ті ж самі варіанті здійснення конструкції забірник 16 має номери позицій велику КІЛЬКІСТЬ частин, що містять в собі криволінійний ЛИСТ 17 І ЗОВНІШНІЙ ЛИСТ 18 ІЗ ЗОВНІШНЬОЇ На фіг 1 представлено вигляд в поперечному розрізі системи 1 приведення до руху за допомосторони криволінійного листа 17 Криволінійний гою рідкого середовища, що має безперервну дилист 17 і ЗОВНІШНІЙ лист 18 перекривають один намічну поверхню, яка являє собою циліндр 2, що одного вздовж зони 19, яка в цілому проходить швидко обертається Циліндр має зовнішню повепаралельно осі обертання циліндра 2 Направлярхню 3 і встановлений на валу 4, що обертається ючі 20 розміщені на суміжних кінцях криволінійного Коли циліндр 2 обертається, будь-яка дана точка листа 17 і зовнішнього листа 18 для спрямування на ЗОВНІШНІЙ поверхні 3 безупинно обертається криволінійного листа 17 під ЗОВНІШНІЙ ЛИСТ 18, кочерез рідке середовище від зони 5 її забору до ли криволінійний лист 17 переміщається навколо зони 6 тяги Фрикційна поверхня поділу між зовніциліндра 2, як показано стрілкою А шньою поверхнею 3 і рідким середовищем 7 ствоНа фіг 4 і 5 представлено циліндр 2, що оберрює шар прискореного рідкого середовища 8 від тається, в якому сепараторна пластина поділена точки 9, розташованої на початку зони 5 забору, на першу частину 21, яка має передню кромку 22, і до смуги 10 тяги, розташованої в КІНЦІ ЗОНИ 6 тяги другу частину 23, яка має передню кромку 24 ПеТовщина шару 8 зростає радіальне назовні від рша і друга частини 21 і 23 поділені вздовж межі, зовнішньої поверхні 3, коли він просувається через яка фактично є перпендикулярною щодо зовнішзони 5 і 6 забору і тяги В шарі 8 має місце градієнт ньої поверхні 3 Перша і друга частини 21 і 23 таG швидкості, тому рідке середовище поблизу зовкож незалежно розміщуються навколо зовнішньої нішньої поверхні 3 переміщується швидше, ніж поверхні 3 Перша частина 21 ВІДДІЛЯЄ прискорене вздовж зовнішнього краю шару 8 при тому ж сарідке середовище в шарі 25 від циліндра 2 і спрямому радіальному положенні щодо циліндра 2 мовує його по напірній поверхні 26, в той час як друга частина 23 відгалужує прискорене рідке сеСепараторна пластина 11 розташовується в редовище до другого шару 27 і спрямовує його по зоні 6 тяги, щоб ВІДДІЛИТИ шар прискореного рідконапірній поверхні 28 В більш прийнятному варіанті го середовища 8 від циліндра 2 і надати йому баздійснення конструкції перша частина 21 має пержаного спрямування Сепараторна пластина 11 ший криволінійний лист 29, прикріплений до кінця має передню кромку 12, що розміщена в безпосеи напірної поверхні 26, а друга частина 23 має редній близькості від зовнішньої поверхні 3 циліндругий криволінійний лист ЗО, прикріплений до дра 2, і напірну поверхню 13, що прилягає до пекінця її напірної поверхні 28 В першій і другій часредньої кромки 12 Напірну поверхню 13 більш тинах 21 і 23 криволінійні листи 29 і ЗО незалежно прийнятне виконано плоскою або фактично плосрозміщені навколо циліндра 2 Один ЗОВНІШНІЙ кою і вона розташовується таким чином, щоб пролист 18 розташовується із зовнішньої сторони криходити фактично тангенціально до зовнішньої поволінійних листів 29 і ЗО Більш прийнятне, щоб верхні 3 За допомогою використання плоскої або ЗОВНІШНІЙ лист 18 проходив фактично по всій довфактично плоскої напірної поверхні 13, розташожині циліндра 2 За допомогою забезпечення неваної тангенціально до зовнішньої поверхні 3, призалежно розташованих частин 29 і ЗО прискорене скорене рідке середовище ефективно ВІДДІЛЯЄТЬСЯ рідке середовище може бути поділене таким чивід зовнішньої поверхні 3 з мінімальною втратою ном, що тяга 31 буде спрямована ліворуч від циліенергії Фактично плоска тангенційна поверхня 13 ндра 2, в той час як тяга 32 буде спрямована празменшує втрати енергії при відділенні прискореноворуч від циліндра 2, як показано на фіг 4 го рідкого середовища від граничного шару у порі 13 44788 Навпаки, перша і друга частини 21 і 22 можуть обертатися навколо циліндра 2 так, що тяга 31 буде спрямована праворуч від циліндра, в той час як тяга 32 буде спрямована ліворуч, як показано на фіг 5 Сепараторні пластини з безліччю частин навколо одного циліндра, що обертається, забезпечують підвищений контроль за спрямуванням транспортного засобу На фіг 6 - 8 представлено застосування одного циліндра 2, що швидко обертається, на плавучому судні 33 з донною частиною 34, яка проходить між носовою частиною 35 і кормою 36 В одному з варіантів здійснення конструкції циліндр 2, що швидко обертається, встановлено горизонтально по ширині судна 33, при цьому забірник 16 утворено в донній частині 34 Циліндр 2, що обертається, переважно розташовується таким чином, що найнижча поверхня фактично перебуває на одному рівні з площиною, утвореною донною частиною 34 біля корми 36 Сепараторна пластина 11 частково розміщена в кармані 37, що розміщений в донній частині 34 біля корми 36 Сепараторна пластина 11 має можливість зворотнопоступального руху між положенням зачеплення або положенням відокремлення, в якому її передня кромка 12перебуває в безпосередній близькості від циліндра 2, та відведеним положенням, в якому вона заходить в карман 37 В більш прийнятному варіанті здійснення конструкції сепараторна пластина 11 переміщається фактично паралельно днищу 34 і тангенціально до нижньої частини циліндра 2, що обертається Реверсивна пластина 38 розміщена на передньому боці циліндра 2, що обертається, і під кутом вгору до транця судна Реверсивна пластина 38 з'єднана із зворотнопоступальним штоком 39, що встановлений через отвір 40 для зворотно-поступального руху між положенням зачеплення і відведеним положенням На фіг 8 і 11 показана реверсивна пластина 38, яка має передню кромку 41, розташовану поблизу переднього боку циліндра 2 На фіг 12-16 показано можливе розташування сепараторної пластини 11 навколо циліндра 2 Як показано на фіг 16, перший кінець 42 передньої кромки 12 сепараторної пластини 11 розташована в стороні від зовнішньої поверхні 3, а другий кінець 43 передньої кромки знаходиться поблизу від зовнішньої поверхні На фіг 17 - 28 зображено інший варіант здійснення винаходу, в якому система приведення до руху згідно з винаходом містить в собі безліч обертальних циліндрів для забезпечення збільшеного вектора тяги, або велику КІЛЬКІСТЬ векторів тяги Якщо звернутися до фіг 17, то система 44 приведення до руху містить в собі перший циліндр 2, що обертається, і другий циліндр 45, що обертається Сепараторна пластина 11 і криволінійний лист 17 оперативно розміщені навколо першого циліндра 2, що обговорювалося вище стосовно до фіг 1-16 Сепараторна пластина 46 і криволінійний лист 47 подібним же чином розміщені навколо другого циліндра 45, що обертається В більш прийнятному варіанті здійснення конструкції друга сепараторна пластина 46 має передню кромку 48, розташовану в безпосередній близькості від зовнішньої поверхні 49 другого циліндра 45, що обертається, і фак 14 тично плоску напірну поверхню 50 поблизу передньої кромки 48 Напірна поверхня 50 переважно проходить фактично тангенціально до зовнішньої поверхні 49, при цьому вона має можливість обертання навколо зовнішньої поверхні 49, так що вона залишається у фактично тангенціальному взаємозв'язку із зовнішньою поверхнею 49 в усьому своєму діапазоні руху Перший і другий циліндри 2 і 45 розміщуються таким чином, що відстоять один від одного, так що сепараторні пластини 11 і 46 перебувають поблизу один від одного по зоні, яка сходиться, 51 забору В більш прийнятному варіанті здійснення конструкції циліндри 2 і 45 виконані у вигляді протилежної пари, в якій приводні вали 4 і 52 фактично є паралельними один одному Отже, сепараторні пластини 11 і 46 розміщені протилежно і фактично паралельно один одному по зоні, яка сходиться, 51 Другий циліндр 45 подібно циліндру 2 переносить рідке середовище від точки 53 до шару прискореного рідкого середовища 54, що проходить через напірну поверхню 50 в бажаному напрямку як тяга 55 Шари 8 і 54 прискореного рідкого середовища формують збільшену тягу 56На фіг 18 представлено сполучення приводного двигуна 57 і поворотного штока 58 з системою 44 приведення до руху, що має два циліндри 2 і 45, що обертаються Приводна система містить в собі перший шків 59, другий шків 60 і третій шків 61 Перший шків 59 прикріплений до приводного валу двигуна 57, а другий і третій шківи 60 і 61 встановлені так, щоб ВІДДІЛЯТИ обертальні вали Другий шків 60 має зубчасте колесо 62, що входить в зачеплення з зубчастим колесом 63, прикріпленим до третього шківу 61 Зубчасте колесо 62 входить в зачеплення із зубчастим колесом 63, так що обертання другого шківа 60 в одному напрямку забезпечує обертання третього шківа 61 в протилежному напрямку Четвертий шків 64 прикріплений до валу 4 першого циліндра 2, а п'ятий шків 65 прикріплений до валу 52 другого циліндра 45 Перший приводний ремінь 66 розташований між першим шківом 59 і другим шківом 60, другий приводний ремінь 67 розташований між третім шківом 61 і четвертим шківом 64, а третій приводний ремінь 68 розміщений між другим шківом 60 і п'ятим шківом 65 При роботі двигун 57 обертає перший шків 59 для приведення до руху першого ременя 66 і другого шківа 60 Другий шків 60 приводить до руху як третій ремінь 68, так і третій шків 61 Другий ремінь 67 і третій ремінь 68 приводять до руху циліндри ВІДПОВІДНО 2 і 45 Зворотний механізм містить в собі кронштейн 69, шарнірно з'єднаний з валом 4 і жорстко з'єднаний з криволінійним листом 17 в протилежних точках 70 і 71 Подібним же чином кронштейн 72 прикріплений до валу 52 і жорстко прикріплений до криволінійного листа 47 в точках 73 і 74 Шток 58 шарнірно прикріплений до КІНЦІВ кронштейнів 69 і 72 за допомогою пальців ВІДПОВІДНО 75 і 76 На фіг 24 представлену систему 77 приведено до руху за допомогою рідкого середовища, що має чотири циліндри 2, 45, 78 і 79 Циліндри розміщені торець до торця і фактично є перпендикулярними щодо суміжних з ними циліндрів для формування зони 80 сходження, яка має прямолінійну форму Як і у випадку двохцилшдро 15 44788 16 воі системи 44 приведення до руху, спрямування На фіг 2 і 3 представлено керування спрямуобертання циліндрів являє собою важливий аспект ванням прискореного рідкого середовища за довинаходу Для одержання максимального приропомогою використання одного циліндра 2, що обещення потоку рідкого середовища циліндри оберртається Як показано на фіг 2, сепараторна таються до зони 80 сходження, так що прискорене пластина 11 завернута радіально навколо циліндрідке середовище проходить через зону 80 схора 2, з тим, щоб надавати тязі 10 напрямку по подження між циліндрами, а після цього виходить з верхні 13 до правого боку циліндра На фіг 3 предзони сходження в бажаному спрямуванні максиставлено сепараторну пластину 11, розміщену мальної тяги радіально навколо циліндра 2, так що тяга 10 спрямована до лівого боку циліндра Кожний циліндр має щонайменше одну відповідну сепараторну пластину, розташовану в зоні Положення сепараторної пластини 11 стосовтяги В одному з варіантів здійснення конструкції но до циліндра 2 також впливає на розмір і місцециліндр 2 має дві сепараторних пластини 11, циположення зони 5 забору і тягової зони 6 Зона ліндр 45 має дві сепараторних пластини 46, цизабору 5 розпочинається праворуч від циліндра 2, ліндр 78 має сепараторні пластини 81 і циліндр 79 коли створюється правостороння тяга, як показано має сепараторні пластини 82 Кожна сепараторна на фіг 2 У випадку спрямування тяги ліворуч від пластина може бути розміщена відносно ВІДПОВІДциліндра 2, як показано на фіг 3, зона 5 забору НОГО їй циліндра таким чином, що окремі вектори розпочинається з лівого боку від циліндра 2 тяги 10, 55, 83 і 84, взаємопов'язані з кожним циліНа фіг 6 і 9 представлено систему приведенндром, можна регулювати окремо Забірники 85 і ня до руху з одним циліндром при русі вперед 86 розміщені навколо циліндрів 78 і 79(фіг 26) Щоб створити тягу для руху вперед, сепараторна пластина 11 розташовується в її положенні зачепПри роботі системи, яка має безперервну дилення, а реверсивна пластина 38 розташовується намічну поверхню, забірник 16 значно збільшує в и відведеному положенні біля передньої частини тягову потужність циліндра 2, що обертається забірника 16 Коли циліндр 2 обертається, рідке Тяга, створювана циліндром 2, що обертається, середовище в забірній зоні прискорюється і спряобертається, змушує транспортний засіб, до якого мовується назад до сепараторної пластини, що він приєднаний, переміщатися через рідке середообговорювалося вище стосовно до фігури 1 Коли вище При переміщенні транспортний засіб ствоприскорене рідке середовище 8 наближається до рює потік рідкого середовища по циліндру 2 ВІДнайнижчої частини циліндра 2, що обертається, ПОВІДНО створюється ефект Магнуса по циліндру 2, передня кромка 12 ВІДДІЛЯЄ ТЯГОВИЙ ПОТІК 10 від при цьому у передньої кромки 12 забезпечується циліндра 2 і напірна поверхня 13 спрямовує тягозона низького тиску, а поблизу зовнішньої поверхні вий потік 10 по вектору, який фактично є паралеЗ в зоні 5 забору забезпечується зона високого льним днищу 34 тиску Забірник 16 має високий тиск у циліндра 2, що викликає більше тертя між зовнішньою поверхНа фіг 7 і 10 представлено систему привенею 3 і рідким середовищем Тому шар прискоредення до руху з одним циліндром при нейтральній ного рідкого середовища 8 зростає швидше і стає передачі Як сепараторна пластина 11, так і ревебільшим, ніж за відсутності забірника 16 рсивна пластина 38 перебувають у відведеному Зовнішня поверхня 3 переважно переміщається з надзвичайно високою швидкістю В залежності від радіуса циліндра 2 і типу рідкого середовища циліндр 2 звичайно обертається зі швидкістю, що становить приблизно 500 - 12000об/хв у воді або приблизно 18000 - 100000об/хв в повітрі Обсяг винаходу не обмежений вищезазначеними швидкостями обертання, тому можуть бути використані ІНШІ швидкості обертання Наприклад, при використанні у воді швидкість зовнішньої поверхні 3 звичайно складає декілька сотень футів в секунду (наприклад, 471,24фута/сек (143,6м/сек) для циліндра, що має радіус розміром в 6 дюймів (152,4см) і який обертається зі швидкістю 9000об/хв) Тертя між рідким середовищем і зовнішньою поверхнею З циліндра 2 спричиняє зростання шару 8 в зоні забору 5 з високою швидкістю Як показано стрілкою 7 щодо потоку рідкого середовища, забірник 16 посилює зростання граничного шару 8 по всій зоні 5 забору, в той час як додаткове рідке середовище всі ще виноситься до шару 8 в зоні тяги Швидкість шару 8 є функцією швидкості зовнішньої поверхні 3 циліндра і в'язкості рідкого середовища Транспортний засіб приводять до руху з бажаною швидкістю і в бажаному напрямку за допомогою зміни швидкості циліндра 2 і тангенціального положення напірної поверхні 13 навколо зовнішньої поверхні З положенні Сепараторна пластина 11 може бути відведена або частково, як показано на фіг 7, або повністю, як показано на фіг 10 Жодної тяги не створюється, коли обидві пластини перебувають в їх відведеному положенні, оскільки не відбувається відділення прискореного рідкого середовища від циліндра 2 ВІДПОВІДНО СИЛИ прискореного рід кого середовища навколо циліндра 2 анулюють одна одну, ефективно приводячи до нульової тяги На фіг 8 і 11 представлено систему приведення до руху з одним циліндром у випадку зворотної передачі Сепараторна пластина 11 відведена в карман 37, а реверсивна пластина 38 в положення зачеплення, так що її передня кромка 41 розташовується поблизу переднього боку циліндра 2, що обертається Коли циліндр 2 обертається, рідке середовище відноситься до забірнику на кормовому боці циліндра 2 і спрямовується під кутом донизу до носу 35 за допомогою напірної поверхні 13 В іншому варіанті здійснення конструкції (не показано) горизонтальний циліндр 2, що обертається, зображений на фіг 6 - 1 1 , має багатосекційну сепараторну пластину і багатосекційну реверсивну пластину Поєднання багатосекційних сепараторної і реверсивної пластин поділяє потік рідкого середовища навколо циліндра так, що імітує звичайну систему приведення до руху з двома 17 44788 18 гребними гвинтами Наприклад, лівий розворот чайними обертальними циліндрами, що призвоможе бути здійснений за допомогою встановлення дить до збільшеної тяги 56 Збільшена тяга 56 має лівих сепараторної і реверсивної пластин в полозначно більшу силу інерції, ніж сума поодиноких ження зворотної передачі, а правих сепараторної і тяг 10 і 55 без прирощення Сила інерції збільшереверсивної пластин в положення передньої пеної тяги 56 залежить від розміру зони 51 сходженредачі Навпаки, правий розворот може бути здійня і від відносного положення приводних валів 4 і снений за допомогою встановлення лівих сепара52 Можна оцінити, що прирощення окремих тяг 10 торної і реверсивної пластин в положення і 55 зменшується, якщо зона сходження надмірно передньої передачі, а правих сепараторної і ревемала, або якщо вали 4 і 52 розміщуються в різних рсивної пластин в положення зворотної передачі горизонтальних площинах ВІДПОВІДНО В ТИХ випадках застосування, при яких вимагається максиНа фіг 12-16 схематично представлено можмальне збільшення тяги, бажано оптимізувати ливе розташування сепараторної пластини 11 нарозмір зони 51 сходження по відношенню до радівколо циліндра 2 На фіг 12 сепараторна пластина уса циліндрів, що обертаються, і положення валів 11 розміщена по довжині циліндра 2 в продольно4 і 52 в загальній площині му напрямку фактично паралельно валу 4 За допомогою регулювання продольного положення Спрямування обертання циліндрів являє сосепараторної пластини 11 по відношенню до цилібою важливий аспект багатоциліндрових варіантів ндра 2 прискорене рідке середовище може бути здійснення винаходу Щоб створити максимальну виборче відділене від циліндра 2, що обертається, тягу для приведення транспортного засобу до руху з тим, щоб створити силовий момент М1 (сепарав напрямку V, перший циліндр 2 обертається за торна пластина 11 розміщена ліворуч від центру) годинною стрілкою, а другий циліндр 45 проти гоабо М2 (сепараторна пластина 11 розміщена прадинної стрілки до зони 51 сходження Таким чином воруч від центру) Якщо звернутися до фігури 13, шари прискореного рідкого середовища 8 і 54 прото сепараторна пластина 11 розміщена радіальне ходять із зовнішнього боку циліндрів через зону назовні від зовнішньої поверхні 3 і фактично є песходження 51 між циліндрами і по напірним сепарпендикулярною їй Радіальне розташування сераторним пластинам 11 і 46 За рахунок обертання параторної пластини 11 дозволяє регулювати КІЛЬциліндрів 2 і 45 таким чином, що шари прискореКІСТЬ прискореного рідкого середовища, що ного рідкого середовища 8 і 54 проходять через ВІДДІЛЯЄТЬСЯ від циліндра 2 Сепараторна пластизону 51 сходження між циліндрами, потік збільшуна 11 може бути розміщена достатньо радіальне ється, що обговорювалося вище, при цьому є відназовні від циліндра 2, так що вона вивільнює шар сутніми втрати енергії на дефлекторних пластиприскореного рідкого середовища для відвернення нах, які більш ніж тангенціальне спрямовують потік створення будь-якої тяги Згідно З фіг 14 сепараз циліндрів торна пластина може бути розміщена по дотичній Для забезпечення бажаного спрямування тяги до зовнішньої поверхні 3 Як і у випадку радіально(фіг 18) в системі, що має два циліндри, осьовий го розташування, показаного на фіг 13, тангенціарух штока 58 викликає поворот кронштейнів 69 і 72 льне розташування сепараторної пластини зменнавколо валів 4 і 52 Коли кронштейни 69 і 72 пошує КІЛЬКІСТЬ прискореного рідкого середовища, вертаються навколо ВІДПОВІДНИХ їм валів, сепаращо ВІДДІЛЯЄТЬСЯ від циліндра 2 На фіг 15 предстаторні пластини 11 і 46 і криволінійні листи 17 і 47 влено обертальне розташування сепараторної повертаються навколо циліндрів 2 і 45 пластини 11 навколо циліндра 2, що обговорюваНа фіг 1 9 - 2 2 представлено інший варіант лося стосовно до фігур 2 і 3 На фіг 16 передня здійснення винаходу, при якому два обертальних кромка 12 сепараторної пластини 11 може регуциліндри 2 і 44 мають незалежно керовані сепаралюватися по куту відносно циліндра 2 Перший торні пластини і забірники На фіг 19 сепараторні кінець 42 передньої кромки 12 розташовується в пластини 11 і 46 розміщені в зоні 51 сходження, стороні від зовнішньої поверхні 3, в той час як друщо обговорювалося вище стосовно до фігури 17, гий кінець 43 передньої кромки 12 перебуває подля створення максимальної тяги в передньому близу від зовнішньої поверхні 3 За допомогою напрямку На фіг 20 представлено сепараторні наріжного регулювання передньої кромки 12 відпластини 11 і 45, розташовані на протилежних носно циліндра 2 можуть бути забезпечені незначбоках циліндрів 2 і 45 зовні зони 51 сходження для ні зміни сили інерції і напрямку тяги, з тим, щоб створення окремих тяг 10 і 55 в зворотному навирівнювати транспортний засіб на ходу або відрепрямку Зворотні тяги 10 і 55 не збільшені, як покагулювати його швидкість зано на фіг 19, оскільки не відбувається об'єднання тяг в зоні 51 сходження для збільшення виносу При роботі системи, яка містить безліч оберстатичного рідкого середовища в шар прискоренотальних циліндрів, (фіг 17) перший циліндр 2 відго рідкого середовища На фіг 21 представлено носить рідке середовище від точки 9 до шару присепараторні пластини 11 і 46, розташовані навколо скореного рідкого середовища 8, що проходить ВІДПОВІДНИХ циліндрів для створення бокової тяги в через напірну поверхню 13 в бажаному напрямку одному напрямку, а на фіг 22 представлено сепаяк тяга 10 Другий циліндр 45 подібним же чином раторні пластини 11 і 46, розташовані так, щоб переносить рідке середовище від точки 53 до шастворити бокову тягу в протилежному напрямку ру прискореного рідкого середовища 54, що проходить через напірну поверхню 50 в бажаному напрямку як тяга 55 Коли шари прискореного рідкого середовища 8 і 54 сходяться в зоні 51 сходження, вони прагнуть віднести до тяги більшу КІЛЬКІСТЬ рідкого середовища у порівнянні із зви На фіг 23 представлено боковий вигляд, що ілюструє застосування двох двохцилшдрових систем 44 приведення до руху, прикріплених до днища 34 буксирного судна 33 Системи приведення до руху прикріплені до буксирного судна таким 19 44788 20 чином, що їхні осі обертання проходять вертикашвидкості циліндра 78 Навпаки, правий розворот льно вниз від днища 34 Для створення максимаз крененшням праворуч може бути здійснений за льної передньої тяги сепараторні пластини циліндопомогою збільшення швидкості циліндра 2 і/або дрів розміщені так, як показано на фіг 19, з тим зменшення швидкості циліндра 78 щоб приводити буксир до руху в передньому наСистема 77 приведення до руху також забезпрямку з максимальною силою печує виняткову величину підйому при відносно невеликій площі, при цьому циліндри легко утриЯк показано на фіг 24, в системі, що має чомуються транспортним засобом На фіг 27 покатири циліндри, вектори тяги 10, 55, 83 і 84 можуть зано систему 77 приведення до руху, що викорисбути відділені від ВІДПОВІДНИХ їм циліндрів і спрятовується в судні на повітряній подушці або на мовані донизу і зовні від зони 80 сходження літакові 87 На відзнаку від звичайних обертальних Спрямовані тяги 10, 55, 83 і 84 розсіюють загальну крил, виконаних з довгих циліндрів, встановлених тягу по більшій площі, забезпечуючи більшу можна консолі, в системі 77 приведення до руху як ливість керування маневрами, пов'язаними з прициліндри використовується певна КІЛЬКІСТЬ більш земленням, і зменшення концентрації скошеного коротких циліндрів, які можуть бути встановлені по вниз потоку На фіг 25 вектори тяги 10, 55, 83 і 84 обох кінцях За допомогою використання певної спрямовані всередину, тим самим фокусуючи сили КІЛЬКОСТІ коротких циліндрів система 77 приведентяги для збільшення обсягу рідкого середовища, ня до руху може мати таку ж саму загальну довжияке виноситься в шари прискореного рідкого серену циліндрів в значно меншому фізичному простодовища В експлуатації для підйому і просування рі Крім того, циліндри в системі 77 приведення до такого транспортного засобу, як літак або судно на руху не вимагають дорогих і складних конструктиповітряній подушці, може бути використано багавних опор, як у випадку циліндрів, встановлюваних тоциліндрову конфігурацію, що показана на фіг на консолі 24, 25 На фіг 26 представлено вигляд у поперечному розрізі чотирьохцилшдрової системи 77 приведення до руху Для забезпечення максимального підйому сепараторні пластини 11, 46, 81 і 82 розміщуються так, щоб спрямувати тягу 10, 55, 83 і 84 вертикально вниз і тангенціальне до самої внутрішньої поверхні циліндрів в зоні 80 сходження Для створення бокової тяги в поєднанні з вертикальною тягою одна або більше сепараторні пластини обертаються навколо ВІДПОВІДНИХ їм центрів, щоб спрямувати сили тяги убік під ВІДПОВІДНИМ кутом, з тим, щоб забезпечити бажану бокову тягу Система 77 приведення до руху забезпечує як підйомну, так і бокову тягу за допомогою поєднання трьох або більше обертальних циліндрів, причому з такою конфігурацією, при якій щонайменше два циліндри в цілому розміщуються протилежно один одному При забезпеченні трьох або більше циліндрів щонайменше два циліндра можуть бути призначені для створення підйомної тяги, в той час як щонайменше один з циліндрів може створювати бокову тягу В одному з варіантів здійснення конструкції циліндрам надана конфігурація у вигляді протилежних пар, при цьому циліндри кожної пари фактично є паралельними один одному В такому варіанті здійснення конструкції КІЛЬКІСТЬ циліндрів може складати, не обмежуючись цією КІЛЬКІСТЮ, порядку чотирьох при прямокутній конфігурації, шість циліндрів при шестикутній конфігурації або ВІСІМ циліндрів при восьмикутній конфігурації В іншому варіанті здійснення конструкції система 77 приведення до руху може містити в собі три циліндри в U - подібній або трьохкутній конфігурації, п'ять циліндрів в п'ятикутній конфігурації або якусь іншу КІЛЬКІСТЬ циліндрів при ВІДПОВІДНІЙ конфігурації Гіроскопічний ефект і характеристики креншня можуть бути повідомлені транспортному засобу за допомогою індивідуальної зміни швидкості циліндрів 2, 45, 78 і 79 Лівий розворот при креншні ліворуч може бути здійснений за допомогою зменшення швидкості циліндра 2 і/або збільшення На фіг 28 представлено інший варіант здійснення багатоциліндрової системи 88 приведення до руху, у випадку якої поворотні осі циліндрів можуть переміщатися, з тим, щоб створити систему приведення до руху, призначену для забезпечення збільшеної бокової тяги і підвищеної бокової швидкості Перший циліндр 2 може бути трохи піднятим, так що його вісь обертання 4 розміщується вище свого нормального положення (показано пунктиром) Подібним же чином третій циліндр 78 може бути розміщений так, що його вісь обертання 89 розташована нижче свого нормального положення (показано пунктиром) За допомогою переміщення осей обертання тяги 10 і 83 можуть бути спрямовані убік без перешкод виносу рідкого середовища для циліндрів 45 і 79 На фіг 29 показано інший варіант здійснення багатоциліндрової системи 77 приведення до руху, що має велику КІЛЬКІСТЬ дископодібних ребер 90, прикріплених до зовнішньої поверхні циліндра 2 Подібним же чином ребра 90 прикріплюються до зовнішньої поверхні циліндрів ВІДПОВІДНО 45, 78 і 79 Ребра розміщуються перпендикулярно зовнішньої поверхні циліндрів і паралельно потоку рідкого середовища Ребра збільшують площу поверхні, що вступає у фрикцюнний контакт з рідким середовищем, тим самим забезпечуючи перенесення більшої КІЛЬКОСТІ рідкого середовища в шар прискореного рідкого середовища і збільшення швидкості рідкого середовища в таких шарах Як найкращим чином показано на фіг 29, сепараторна пластина 11 має велику КІЛЬКІСТЬ пальців 91, розташованих в просторі між кожним з ребер 90 Пальці сепараторних пластин ВІДДІЛЯЮТЬ прискорене рідке середовище як від зовнішньої поверхні циліндрів, так і від поверхні пальців, і спрямовують його вздовж напірних поверхонь сепараторних пластин, що обговорювалося вище Винахід пропонує використання будь-якого типу безперервної динамічної поверхні і не обмежений циліндрами, що обертаються На фіг 31 представлено інший вигляд безперервної динамічної поверхні, яка являє собою стрічку 92, що обвиває 22 21 44788 щонайменше два циліндри Стрічку приводять до який є тангенціальним щодо поверхні, тільки енерруху зі значною ЛІНІЙНОЮ ШВИДКІСТЮ за допомогою гія обертання прискореного рідкого середовища щонайменше одного з циліндрів, при цьому частивтрачається на сепараторних пластинах Крім тона стрічки циркулює через рідке середовище Сего, зважаючи на наявність фактично плоскої напірпараторна пластина 11 розміщена біля одного з ної поверхні, яка знаходиться поблизу від передциліндрів, там, де прискорене рідке середовище ньої кромки, винахід додатково зводить до повинно бути відділене від стрічки Сепараторна мінімуму втрати енергії, які в іншому випадку мали пластина 11 може бути розміщена фактично танб місце, коли прискорене рідке середовище ВІДДІгенціальне до поверхні стрічки для спрямування ЛЯЄТЬСЯ від динамічної поверхні По-друге, у випатяги 10 поздовжньо від стрічки, або може бути дку двох або більше циліндрів, що обертаються, розміщена під кутом (показано пунктиром) для циліндри розміщуються так, щоб створити зону спрямування тяги в бокову сторону від стрічки Тип сходження, яка посилює тягу в бажаному спрямубезперервної динамічної поверхні (наприклад, ванні за допомогою обертання циліндрів всередициліндр, що обертається, або швидкорухома стріну до зони сходження, так що тяга буде безперешчка) загалом не чинить вплив на принципи і варіакодно передаватися між циліндрами в бажаному нти здійснення конструкції, які тут розкриті Таким спрямуванні По-третє, у винаході використовучином винахід не повинен обмежуватися циліндються три або більше циліндрів, що обертаються, рами, що обертаються як для забезпечення тяги для підйому, так і для руху вперед Даний винахід забезпечує деякі переваги у порівнянні із звичайними системами приведення до Також очевидно і те, що хоча з ілюстративною руху, що мають динамічні поверхні По-перше, за метою тут розкриті лише певні варіанти, без відхидопомогою відділення прискореного рідкого серелення від суті і обсягу винаходу можуть бути викодовища від динамічної поверхні вздовж вектора, нані його модифікації \чл ФІГ. 1 44788 24 10 ФІГ. 6 Фіг. 2 36 34 Фіг. З 34 Фіг. 8 31 36 19 Фіг. 9 44788 26 3.6 40 С Фіг. 10 11 37 Фіг. 14 Фіг. 15 Н2 Фіг. 12 Фіг. 13 Фіг. 17 28 44788 Фіг. 18 Фіг. 19 Фіг. 23 Фіг. 20 Фіг. 24 /9 82 45 Фіг. 25 29 44788 so—< Фіг. 26 Б 90 Фіг. 29 90 46 аі 1Ї Фіг. ЗО Фіг. 27 Фіг. 31 Фіг. 28 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 31 44788 32
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B63H 25/06, B64C 23/00
Мітки: спрямуванням, варіанти, допомогою, прискорення, середовища, система, керування, приведення, також, рідкого, руху
Код посилання
<a href="https://ua.patents.su/16-44788-sistema-privedennya-do-rukhu-za-dopomogoyu-ridkogo-seredovishha-dlya-priskorennya-a-takozh-keruvannya-spryamuvannyam-ridkogo-seredovishha-varianti.html" target="_blank" rel="follow" title="База патентів України">Система приведення до руху за допомогою рідкого середовища для прискорення, а також керування спрямуванням рідкого середовища (варіанти)</a>
Генератор коливань рідкого середовища та витратомір рідкого середовища в потоці, який містить такий генератор
Номер патенту: 42727
Опубліковано: 15.11.2001
Автор: Хуанг Бао Туан
МПК: F15C 1/00, G01D 5/42, G01F 1/32
Мітки: рідкого, коливань, середовища, містить, витратомір, потоці, генератор
Формула / Реферат:
1. Генератор колебаний текучей среды, симметричный относительно продольной плоскости симметрии, содержащий входную часть с входным отверстием для формирования двумерной струи текучей среды, колеблющейся в поперечном направлении по отношению к плоскости симметрии, камеру колебаний, соединенную одним из своих концов со входным отверстием для текучей среды, а своим противоположным концом - с выходным отверстием для текучей среды, препятствие,...
Пульт, система та спосіб ручного керування та стабілізації регульованої величини руху літального апарата “аржесан”
Номер патенту: 26286
Опубліковано: 19.07.1999
Автор: Кашматов Віктор Йосипович
МПК: B64C 13/00
Мітки: ручного, система, величини, апарата, керування, аржесан, літального, руху, стабілізації, пульт, регульованої, спосіб
Формула / Реферат:
1. Пульт ручного управления и стабилизации регулируемой величины движения летательного аппарата, например воздушного судна, включающий стрелку и рукоятку, отличающийся тем, что стрелка выполнена в форме рукоятки и совмещена с нею, пульт ручного управления и стабилизации построен по схеме замкнутой системы непрямого регулирования положения рукоятки, которая (система) имеет вход и выход для связи с исполнительным контуром системы ручного...
Стільникова система зв’язку (варіанти), спосіб керування потужністю передачі у стільниковій системі зв’язку (варіанти), мобільний пристрій та контролер стільникової станції та системи
Номер патенту: 42677
Опубліковано: 15.11.2001
Автори: Уітлі Чарлз Е., Падовейні Роберто, Уівер Ліндсі А. мол., Блейкні Роберт Д., Гілхаузен Клайн С.
МПК: H04L 27/26
Мітки: потужністю, керування, система, стільникової, варіанти, спосіб, станції, пристрій, контролер, стільникова, мобільній, стільниковій, передачі, системі, зв'язку
Формула / Реферат:
1. Сотовая система связи, в которой пользователь (16, 18) системы поддерживает двустороннюю связь с другим пользователем несущими информацию модулированными сигналами расширенного спектра, передаваемыми через несколько сотовых станций (12, 14), отличающаяся тем, что пользователь (16, 18) системы имеет передатчик (84) для передачи несущих информацию модулированных сигналов расширенного спектра указанным сотовым станциям (12, 14), приемники...
Спосіб отримання рідкого чавуну або рідких стальних напівпродуктів, а також установка для здійснення способу
Номер патенту: 37264
Опубліковано: 15.05.2001
Автор: Нагл Міхаел
МПК: C21B 13/00
Мітки: спосіб, отримання, рідкого, чавуну, стальних, також, рідких, здійснення, способу, напівпродуктів, установка
Формула / Реферат:
1. Способ получения жидкого чугуна или жидких стальных полупродуктов из мелкозернистого железосодержащего материала, включающий его подачу и расплавление в зоне плавильной газификации плавильного газификатора, в котором при подводе углеродсодержащего материала и кислородсодержащего газа одновременно получают восстановительный газ в слое из твердых носителей углерода, отличающийся тем, что мелкозернистый железосодержащий материал подают в...
Спосіб лікування порушень мікроциркуляції за допомогою рідкого азоту
Номер патенту: 41028
Опубліковано: 15.08.2001
Автор: Верещака Володимир Валентинович
МПК: A61K 33/02, A61B 18/02
Мітки: спосіб, допомогою, порушень, мікроциркуляції, азоту, лікування, рідкого
Формула / Реферат:
1. Спосіб лікування порушень мікроциркуляції за допомогою рідкого азоту, який включає кріогенний вплив на шкіру для руйнування шкірних новоутворень, який відрізняється тим, що виконують кріогенний опік першого ступеня з наступним візуальним контролем кріогенного впливу.2. Спосіб за п. 1, який відрізняється тим, що проводять передманіпуляційну підготовку зони впливу.3. Спосіб за п. 1 або 2, який відрізняється тим, що між...
Попередній патент: Прецесійна передача
Наступний патент: Зубна щітка та ручка зубної щітки
Випадковий патент: Гойдалка-альтанка