Пульт, система та спосіб ручного керування та стабілізації регульованої величини руху літального апарата “аржесан”
Формула / Реферат
1. Пульт ручного управления и стабилизации регулируемой величины движения летательного аппарата, например воздушного судна, включающий стрелку и рукоятку, отличающийся тем, что стрелка выполнена в форме рукоятки и совмещена с нею, пульт ручного управления и стабилизации построен по схеме замкнутой системы непрямого регулирования положения рукоятки, которая (система) имеет вход и выход для связи с исполнительным контуром системы ручного управления и стабилизации.
2. Пульт ручного управления и стабилизации по п.1, отличающийся тем, что по схеме замкнутой системы непрямого регулирования положения рукоятки управления к рукоятке через редуктор подсоединены двигатель, генератор и датчик положения рукоятки, выходы датчика положения рукоятки и генератора соединены со входами, а обмотка управления двигателя соединена с выходом усилителя-преобразователя сигналов пульта ручного управления и стабилизации, усилитель-преобразователь сигналов пульта ручного управления и стабилизации имеет дополнительные вход и выход для связи с исполнительным контуром системы ручного управления и стабилизации.
3. Система ручного управления и стабилизации регулируемой величины движения летательного аппарата, включающая пульт ручного управления и стабилизации, исполнительный контур системы ручного управления и стабилизации, состоящий из последовательного соединения исполнительного устройства, летательного аппарата, как объекта управления его движением, и датчика регулируемой величины движения летательного аппарата, отличающаяся тем, что пульт ручного управления и стабилизации выполнен по п.1 и соединен с исполнительным контуром системы ручного управления и стабилизации по схеме обратимой следящей системы управления и стабилизации регулируемой величины движения летательного аппарата.
4. Система ручного управления и стабилизации по п.3, отличающаяся тем, что пульт ручного управления и стабилизации выполнен по п.2, по схеме обратимой следящей системе управления и стабилизации регулируемой величины движения летательного аппарата, выход датчика регулируемой величины движения летательного аппарата подключен на дополнительный вход усилителя-преобразователя сигналов пульта ручного управления и стабилизации, а дополнительный выход усилителя-преобразователя сигналов пульта ручного управления и стабилизации соединен со входом исполнительного устройства системы ручного управления и стабилизации.
5. Способ ручного управления и стабилизации регулируемой величины движения летательного аппарата, включающий дискретный визуальный контроль регулируемой величины движения летательного аппарата по прибору или окружающей среде, отличающийся тем, что с помощью системы ручного управления и стабилизации по п.3, воспринимают управляющие и стабилизирующее усилия оператора на рукоятку и создают регулирующее воздействие на летательный аппарат, отображают в динамике рукоятки регулируемую величину, регулирующее и возмущающее воздействия на летательный аппарат, задают желаемое значение регулируемой величины движения летательного аппарата и стабилизируют ее на этом значении, задавая положение рукоятки и удерживая ее в заданном положении управляющим и стабилизирующим усилиями оператора на рукоятку, а управляющие и стабилизирующее усилия оператора на рукоятку создают с помощью навыков непосредственного управления и стабилизации рукоятки в системе ручного управления и стабилизации.
6. Способ ручного управления и стабилизации регулируемой величины движения летательного аппарата по п.5, отличающийся тем, что при управлении с помощью системы ручного управления и стабилизации по п.4, отображают регулируемую величину движения летательного аппарата в виде нейтрального положения рукоятки, а регулирующее воздействие - в виде противодействующего усилия двигателя на рукоятку, создают регулирующее воздействие на летательный аппарат и противодействующее усилие двигателя на рукоятку в зависимости от регулируемой величины, нейтрального положения рукоятки и смещения рукоятки относительно нейтрального положения, смещение рукоятки относительно нейтрального положения создают основным управляющим усилием оператора на рукоятку, дополнительным управляющим усилием на рукоятку синхронизируют изменение нейтрального положения рукоятки с изменением регулируемой величины, основным и дополнительным управляющими усилиями на рукоятку создают изменение нейтрального положения рукоятки, пропорциональное желаемому изменению регулируемой величины, а основное и дополнительное управляющие усилия оператора на рукоятку создают с помощью навыка непосредственного управления рукояткой в системе ручного управления и стабилизации.
7. Способ ручного управления и стабилизации регулируемой величины движения летательного аппарата по п.5, отличающийся тем, что при стабилизации с помощью системы ручного управления и стабилизации по п.4, отображают заданное значение регулируемой величины в виде заданного нейтрального положения рукоятки, возмущающее воздействие на летательный аппарат - в виде возмущающего усилия двигателя на рукоятку, создают регулирующее воздействие на летательный аппарат и возмущающее воздействие двигателя на рукоятку в зависимости от регулируемой величины, нейтрального положения рукоятки и смещения рукоятки относительно нейтрального положения, смещение регулируемой величины относительно заданногозначения создают возмущающим воздействием на летательный аппарат, смещение рукоятки относительно заданного нейтрального положения создают стабилизирующим усилием оператора на рукоятку, стабилизируют регулируемую величину на заданном значении при возмущающем воздействии на летательный аппарат, противодействуя стабилизирующим усилием на рукоятку изменению заданного нейтрального положения рукоятки от возмущающего усилия двигателя на рукоятку, а стабилизирующее усилие на рукоятку создают с помощью навыков непосредственной стабилизации рукоятки управления в системе ручного управления и стабилизации.
8. Способ ручного управления и стабилизации регулируемой величины движения летательного аппарата по п.7, отличающийся тем, что регулируемую величину стабилизируют на заданном значении без динамической и статической ошибок, удерживая стабилизирующим усилием оператора на рукоятку нейтральное положение рукоятки без смещения относительно заданного положения, а стабилизирующее усилие оператора на рукоятку создают с помощью навыка непосредственной астатической стабилизации рукоятки в системе ручного управления и стабилизации в ответ на возмущающее усилие двигателя на рукоятку, сохраняя неизменным заданное нейтральное положение рукоятки.
9. Способ ручного управления и стабилизации регулируемой величины движения летательного аппарата по п.7, отличающийся тем, что регулируемую величину стабилизируют на заданном значении с динамической и статической ошибками, удерживая стабилизирующим усилием оператора на рукоятку нейтральное положение рукоятки со смещением нейтрального положения рукоятки относительно заданного положения, а стабилизирующее усилие оператора создают с помощью навыка непосредственной статической стабилизации рукоятки в системе ручного управления и стабилизации в ответ на смещение нейтрального положения рукоятки от заданного положения, величину и характер этого смещения регулируют изменением жесткости, демпфирования и начального положения позы руки.
Текст
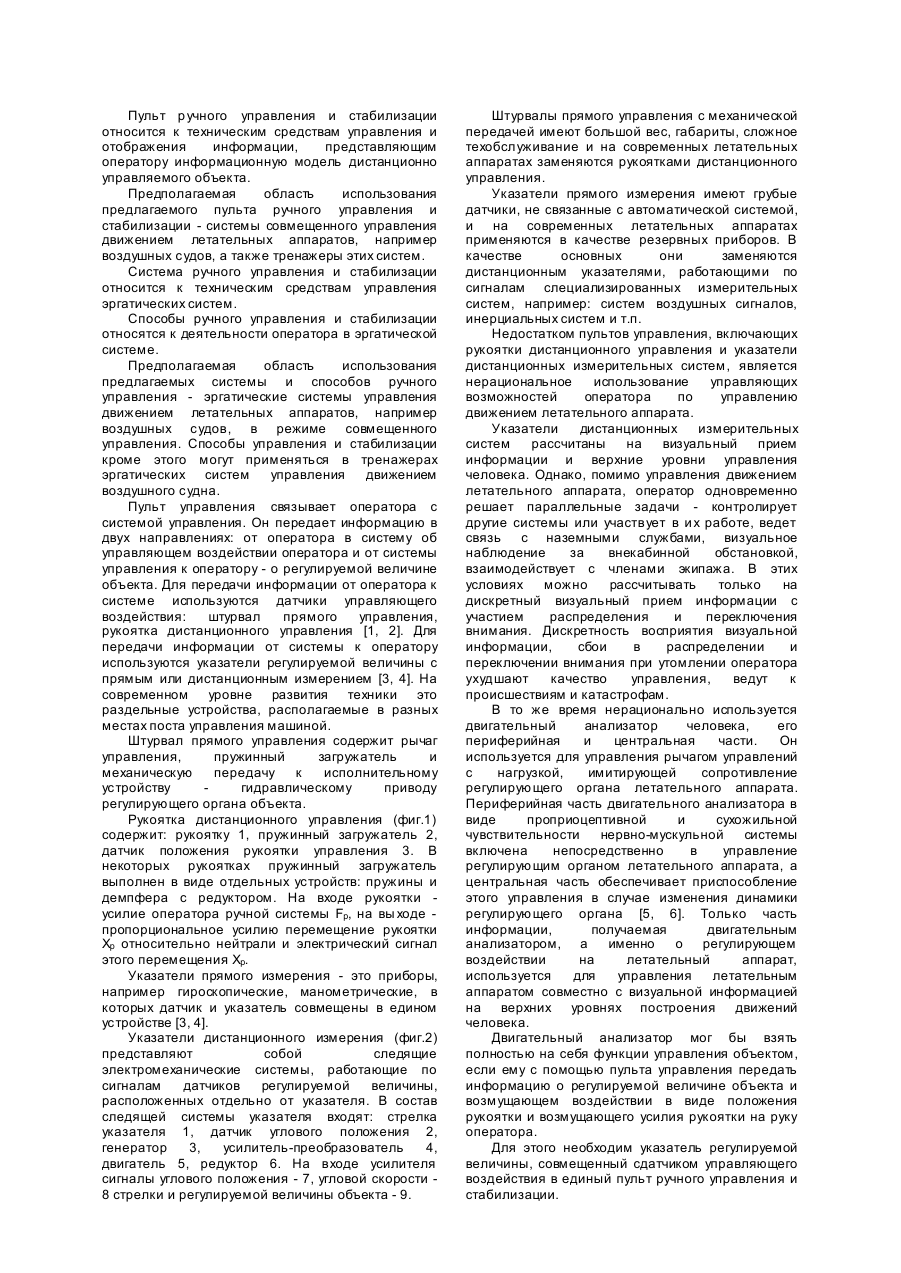
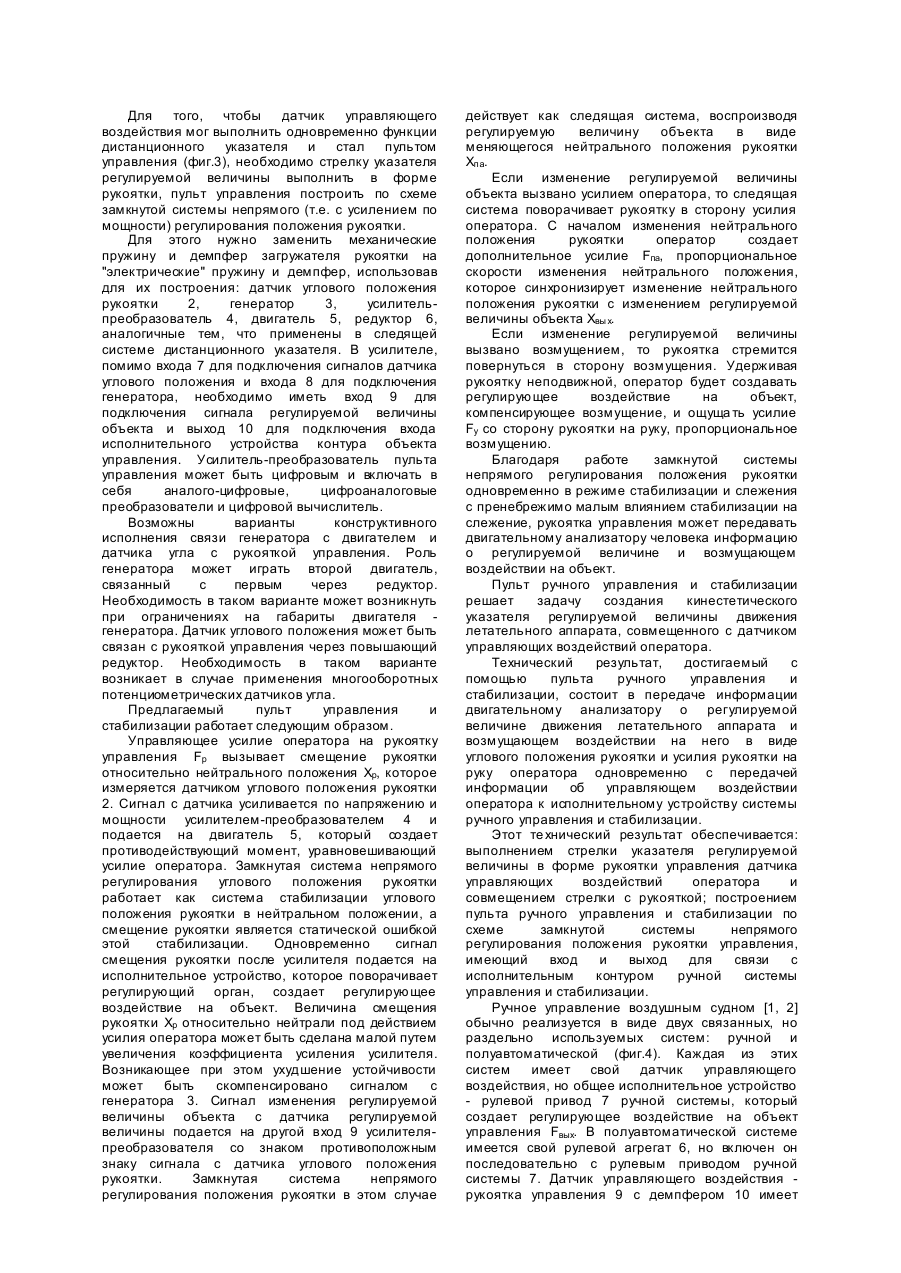
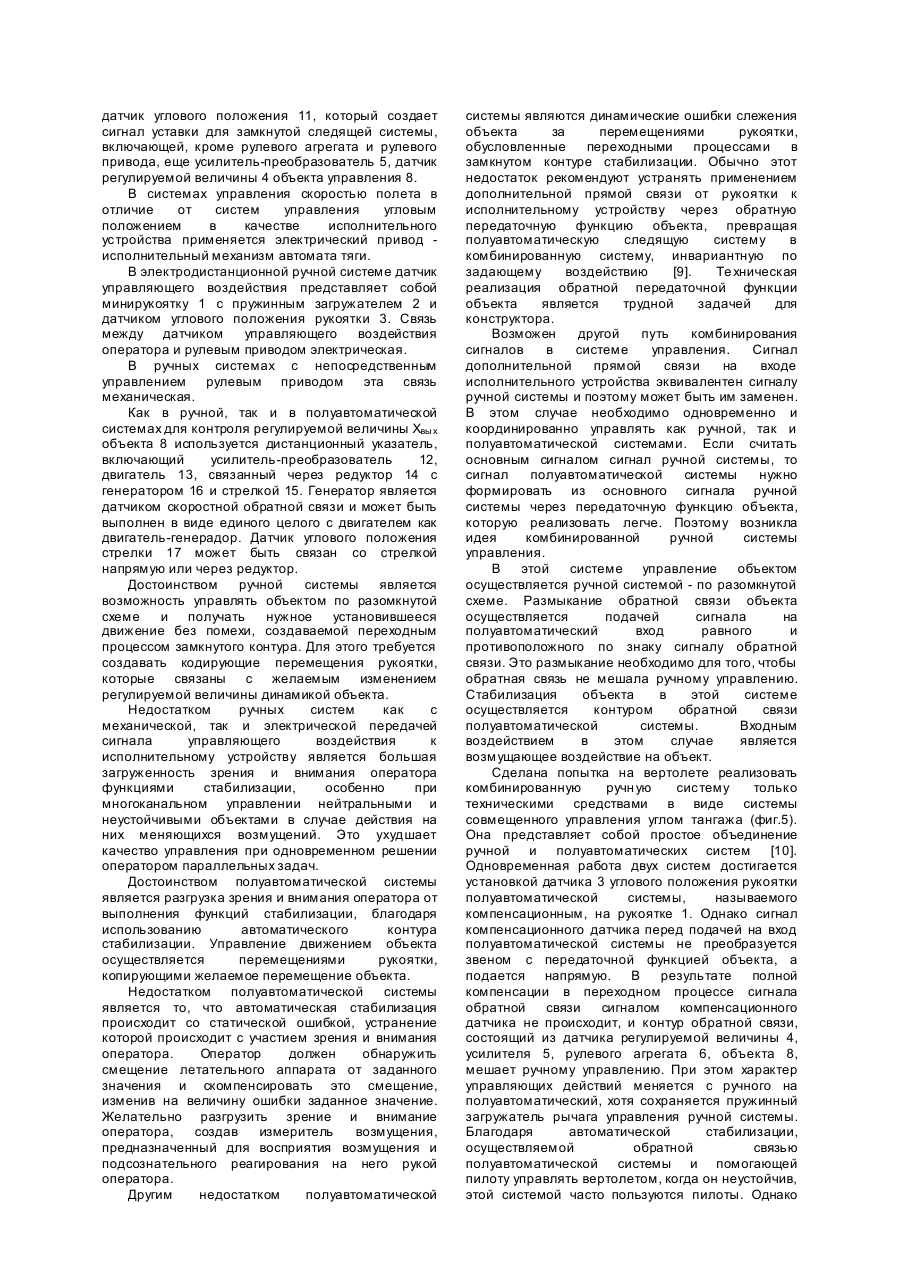
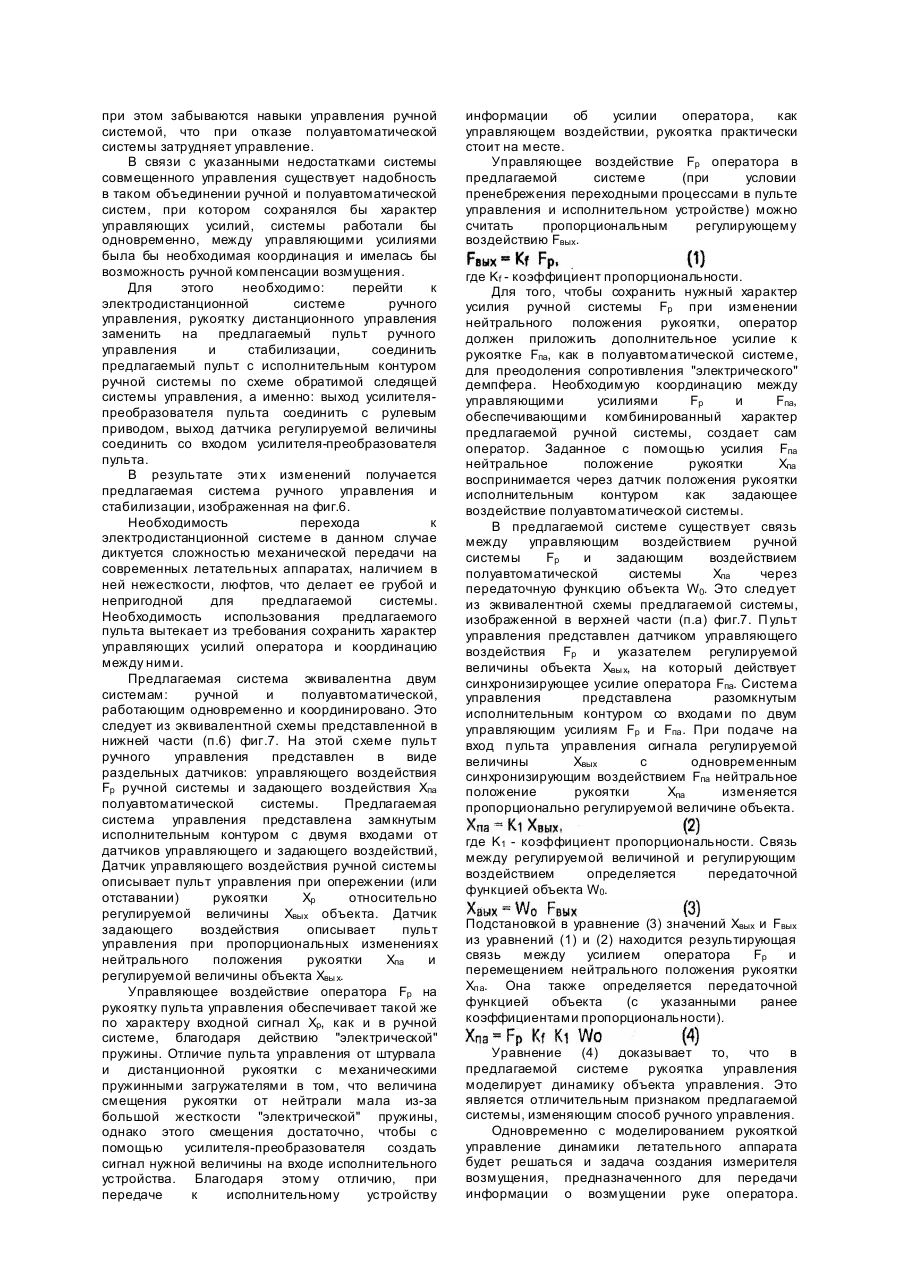
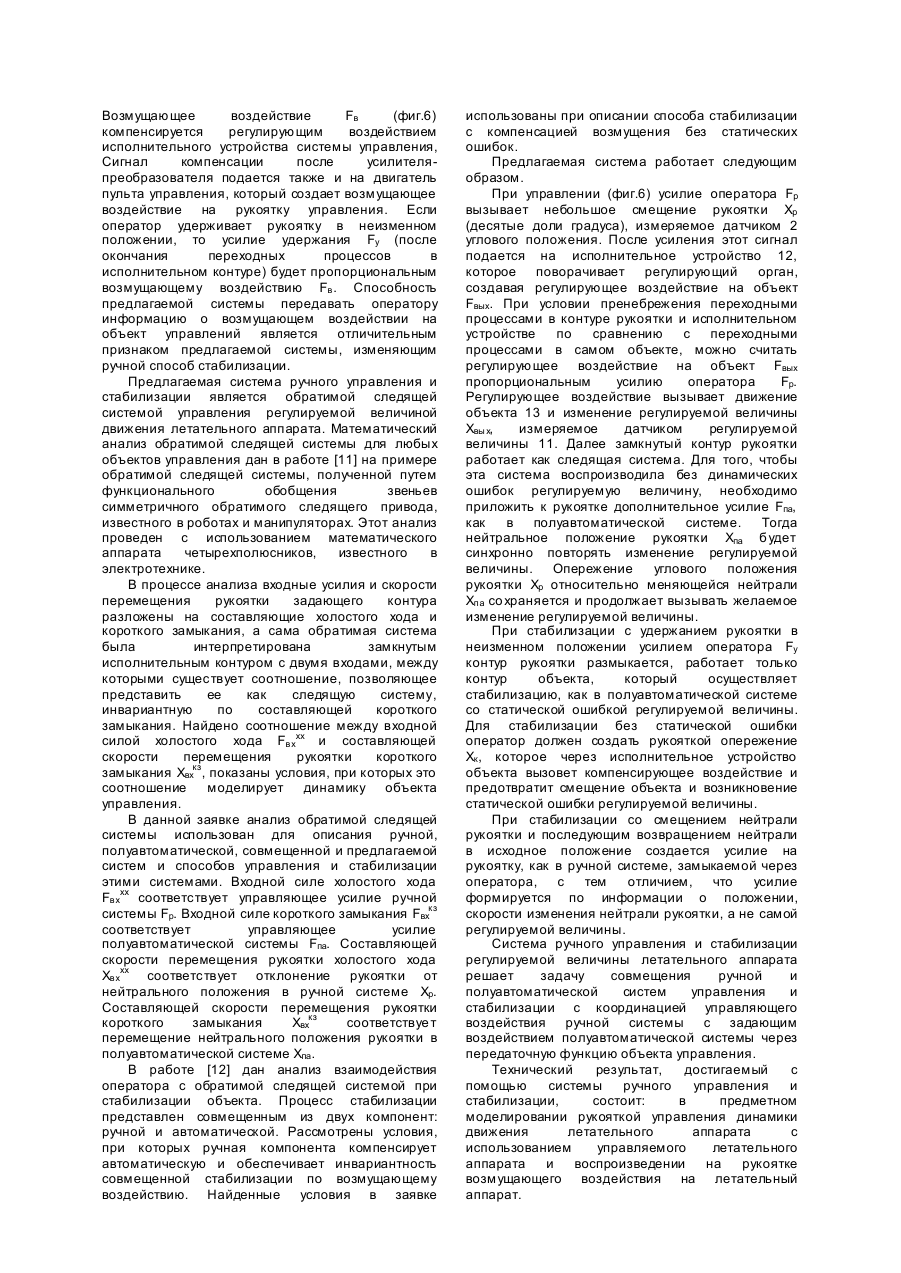
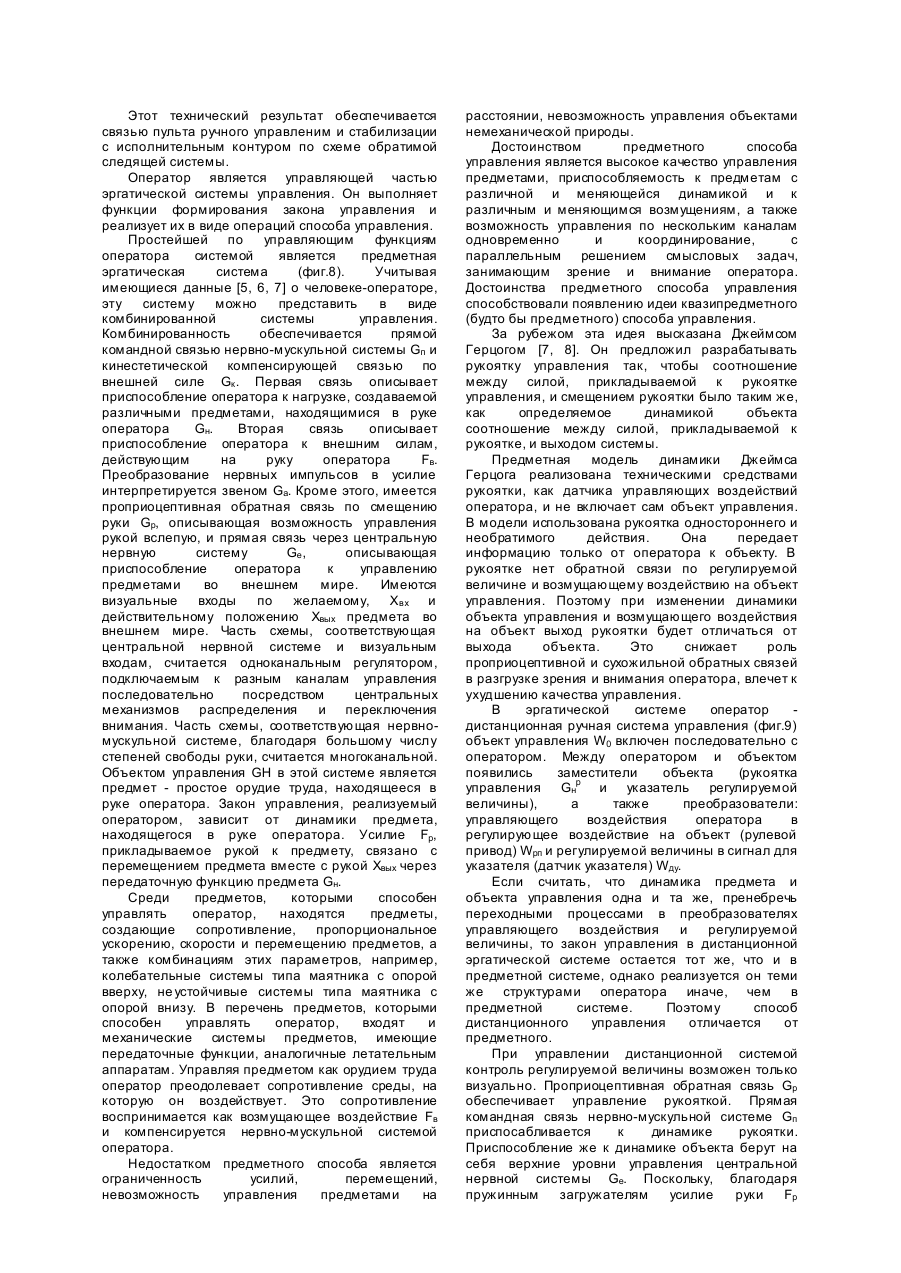
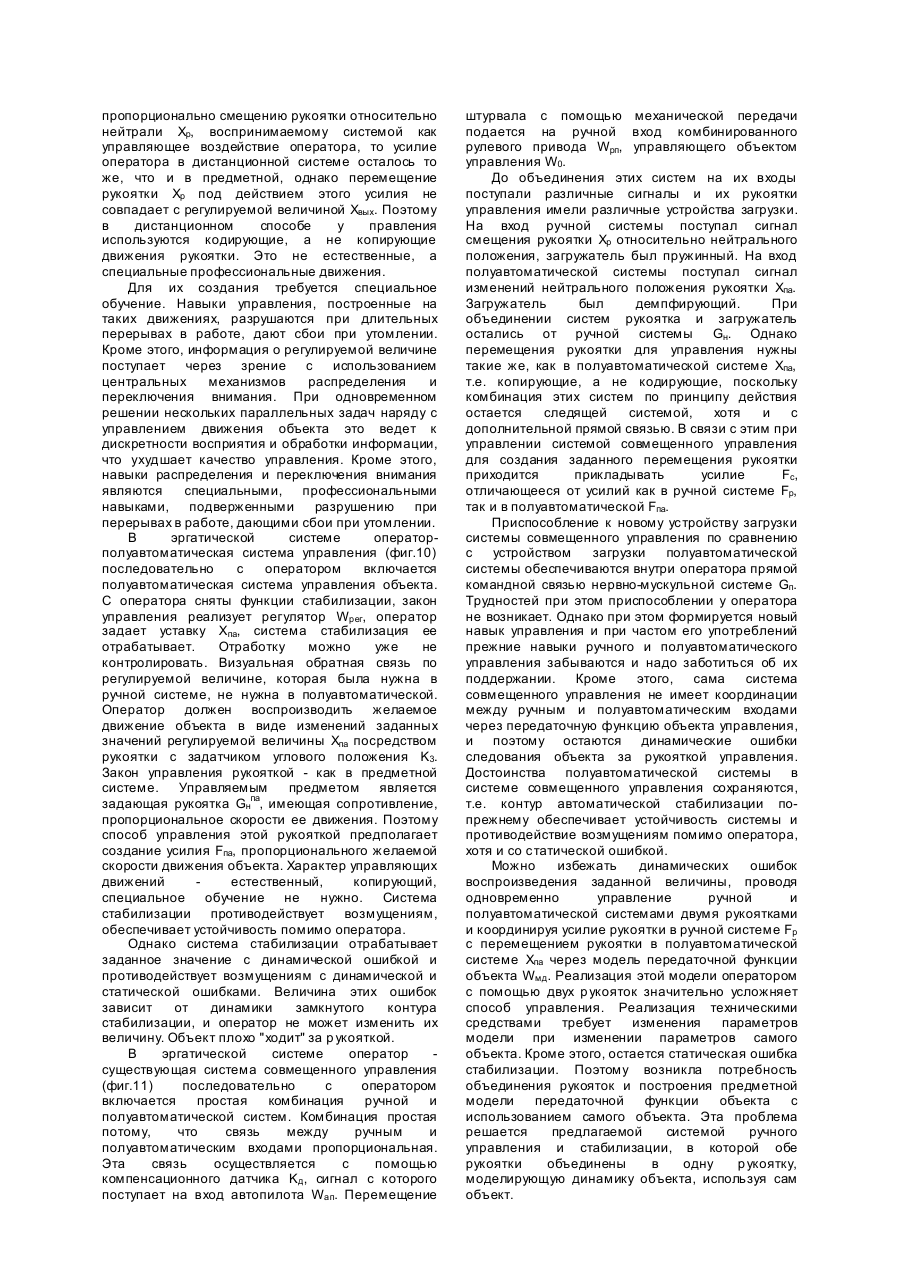
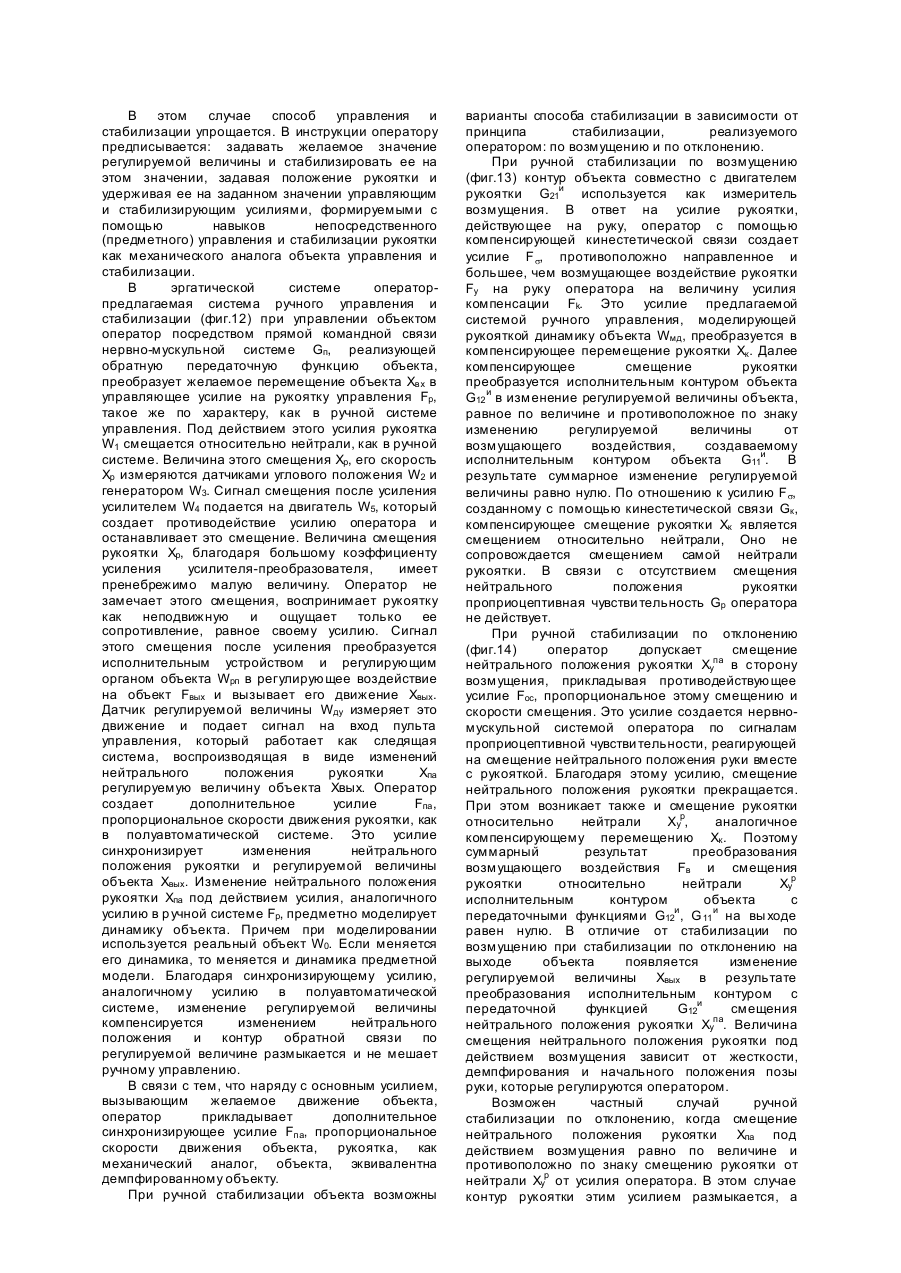
Пульт р учного управления и стабилизации относится к техническим средствам управления и отображения информации, представляющим оператору информационную модель дистанционно управляемого объекта. Предполагаемая область использования предлагаемого пульта ручного управления и стабилизации - системы совмещенного управления движением летательных аппаратов, например воздушных судов, а также тренажеры этих систем. Система ручного управления и стабилизации относится к техническим средствам управления эргатических систем. Способы ручного управления и стабилизации относятся к деятельности оператора в эргатической системе. Предполагаемая область использования предлагаемых системы и способов ручного управления - эргатические системы управления движением летательных аппаратов, например воздушных судов, в режиме совмещенного управления. Способы управления и стабилизации кроме этого могут применяться в тренажерах эргатических систем управления движением воздушного судна. Пульт управления связывает оператора с системой управления. Он передает информацию в двух направлениях: от оператора в систему об управляющем воздействии оператора и от системы управления к оператору - о регулируемой величине объекта. Для передачи информации от оператора к системе используются датчики управляющего воздействия: штурвал прямого управления, рукоятка дистанционного управления [1, 2]. Для передачи информации от системы к оператору используются указатели регулируемой величины с прямым или дистанционным измерением [3, 4]. На современном уровне развития техники это раздельные устройства, располагаемые в разных местах поста управления машиной. Штурвал прямого управления содержит рычаг управления, пружинный загружатель и механическую передачу к исполнительному устройству гидравлическому приводу регулирующего органа объекта. Рукоятка дистанционного управления (фиг.1) содержит: рукоятку 1, пружинный загружатель 2, датчик положения рукоятки управления 3. В некоторых рукоятках пружинный загружатель выполнен в виде отдельных устройств: пружины и демпфера с редуктором. На входе рукоятки усилие оператора ручной системы Fр, на вы ходе пропорциональное усилию перемещение рукоятки Xр относительно нейтрали и электрический сигнал этого перемещения Xр. Указатели прямого измерения - это приборы, например гироскопические, манометрические, в которых датчик и указатель совмещены в едином устройстве [3, 4]. Указатели дистанционного измерения (фиг.2) представляют собой следящие электромеханические системы, работающие по сигналам датчиков регулируемой величины, расположенных отдельно от указателя. В состав следящей системы указателя входят: стрелка указателя 1, датчик углового положения 2, генератор 3, усилитель-преобразователь 4, двигатель 5, редуктор 6. На входе усилителя сигналы углового положения - 7, угловой скорости 8 стрелки и регулируемой величины объекта - 9. Штурвалы прямого управления с механической передачей имеют большой вес, габариты, сложное техобслуживание и на современных летательных аппаратах заменяются рукоятками дистанционного управления. Указатели прямого измерения имеют грубые датчики, не связанные с автоматической системой, и на современных летательных аппаратах применяются в качестве резервных приборов. В качестве основных они заменяются дистанционным указателями, работающими по сигналам слециализированных измерительных систем, например: систем воздушных сигналов, инерциальных систем и т.п. Недостатком пультов управления, включающих рукоятки дистанционного управления и указатели дистанционных измерительных систем, является нерациональное использование управляющих возможностей оператора по управлению движением летательного аппарата. Указатели дистанционных измерительных систем рассчитаны на визуальный прием информации и верхние уровни управления человека. Однако, помимо управления движением летательного аппарата, оператор одновременно решает параллельные задачи - контролирует другие системы или участвует в и х работе, ведет связь с наземными службами, визуальное наблюдение за внекабинной обстановкой, взаимодействует с членами экипажа. В этих условиях можно рассчитывать только на дискретный визуальный прием информации с участием распределения и переключения внимания. Дискретность восприятия визуальной информации, сбои в распределении и переключении внимания при утомлении оператора ухудшают качество управления, ведут к происшествиям и катастрофам. В то же время нерационально используется двигательный анализатор человека, его периферийная и центральная части. Он используется для управления рычагом управлений с нагрузкой, имитирующей сопротивление регулирующего органа летательного аппарата. Периферийная часть двигательного анализатора в виде проприоцептивной и сухожильной чувствительности нервно-мускульной системы включена непосредственно в управление регулирующим органом летательного аппарата, а центральная часть обеспечивает приспособление этого управления в случае изменения динамики регулирующего органа [5, 6]. Только часть информации, получаемая двигательным анализатором, а именно о регулирующем воздействии на летательный аппарат, используется для управления летательным аппаратом совместно с визуальной информацией на верхних уровнях построения движений человека. Двигательный анализатор мог бы взять полностью на себя функции управления объектом, если ему с помощью пульта управления передать информацию о регулируемой величине объекта и возмущающем воздействии в виде положения рукоятки и возмущающего усилия рукоятки на руку оператора. Для этого необходим указатель регулируемой величины, совмещенный сдатчиком управляющего воздействия в единый пульт ручного управления и стабилизации. Для того, чтобы датчик управляющего воздействия мог выполнить одновременно функции дистанционного указателя и стал пультом управления (фиг.3), необходимо стрелку указателя регулируемой величины выполнить в форме рукоятки, пульт управления построить по схеме замкнутой системы непрямого (т.е. с усилением по мощности) регулирования положения рукоятки. Для этого нужно заменить механические пружину и демпфер загружателя рукоятки на "электрические" пружину и демпфер, использовав для их построения: датчик углового положения рукоятки 2, генератор 3, усилительпреобразователь 4, двигатель 5, редуктор 6, аналогичные тем, что применены в следящей системе дистанционного указателя. В усилителе, помимо входа 7 для подключения сигналов датчика углового положения и входа 8 для подключения генератора, необходимо иметь вход 9 для подключения сигнала регулируемой величины объекта и выход 10 для подключения входа исполнительного устройства контура объекта управления. Усилитель-преобразователь пульта управления может быть цифровым и включать в себя аналого-цифровые, цифроаналоговые преобразователи и цифровой вычислитель. Возможны варианты конструктивного исполнения связи генератора с двигателем и датчика угла с рукояткой управления. Роль генератора может играть второй двигатель, связанный с первым через редуктор. Необходимость в таком варианте может возникнуть при ограничениях на габариты двигателя генератора. Датчик углового положения может быть связан с рукояткой управления через повышающий редуктор. Необходимость в таком варианте возникает в случае применения многооборотных потенциометрических датчиков угла. Предлагаемый пульт управления и стабилизации работает следующим образом. Управляющее усилие оператора на рукоятку управления Fр вызывает смещение рукоятки относительно нейтрального положения Xр, которое измеряется датчиком углового положения рукоятки 2. Сигнал с датчика усиливается по напряжению и мощности усилителем-преобразователем 4 и подается на двигатель 5, который создает противодействующий момент, уравновешивающий усилие оператора. Замкнутая система непрямого регулирования углового положения рукоятки работает как система стабилизации углового положения рукоятки в нейтральном положении, а смещение рукоятки является статической ошибкой этой стабилизации. Одновременно сигнал смещения рукоятки после усилителя подается на исполнительное устройство, которое поворачивает регулирующий орган, создает регулирующее воздействие на объект. Величина смещения рукоятки Xр относительно нейтрали под действием усилия оператора может быть сделана малой путем увеличения коэффициента усиления усилителя. Возникающее при этом ухудшение устойчивости может быть скомпенсировано сигналом с генератора 3. Сигнал изменения регулируемой величины объекта с датчика регулируемой величины подается на другой вход 9 усилителяпреобразователя со знаком противоположным знаку сигнала с датчика углового положения рукоятки. Замкнутая система непрямого регулирования положения рукоятки в этом случае действует как следящая система, воспроизводя регулируемую величину объекта в виде меняющегося нейтрального положения рукоятки Xпа. Если изменение регулируемой величины объекта вызвано усилием оператора, то следящая система поворачивает рукоятку в сторону усилия оператора. С началом изменения нейтрального положения рукоятки оператор создает дополнительное усилие Fпа, пропорциональное скорости изменения нейтрального положения, которое синхронизирует изменение нейтрального положения рукоятки с изменением регулируемой величины объекта Xвы х. Если изменение регулируемой величины вызвано возмущением, то рукоятка стремится повернуться в сторону возмущения. Удерживая рукоятку неподвижной, оператор будет создавать регулирующее воздействие на объект, компенсирующее возмущение, и ощуща ть усилие Fу со сторону рукоятки на руку, пропорциональное возмущению. Благодаря работе замкнутой системы непрямого регулирования положения рукоятки одновременно в режиме стабилизации и слежения с пренебрежимо малым влиянием стабилизации на слежение, рукоятка управления может передавать двигательному анализатору человека информацию о регулируемой величине и возмущающем воздействии на объект. Пульт ручного управления и стабилизации решает задачу создания кинестетического указателя регулируемой величины движения летательного аппарата, совмещенного с датчиком управляющих воздействий оператора. Технический результат, достигаемый с помощью пульта ручного управления и стабилизации, состоит в передаче информации двигательному анализатору о регулируемой величине движения летательного аппарата и возмущающем воздействии на него в виде углового положения рукоятки и усилия рукоятки на руку оператора одновременно с передачей информации об управляющем воздействии оператора к исполнительному устройству системы ручного управления и стабилизации. Этот те хнический результат обеспечивается: выполнением стрелки указателя регулируемой величины в форме рукоятки управления датчика управляющих воздействий оператора и совмещением стрелки с рукояткой; построением пульта ручного управления и стабилизации по схеме замкнутой системы непрямого регулирования положения рукоятки управления, имеющий вход и выход для связи с исполнительным контуром ручной системы управления и стабилизации. Ручное управление воздушным судном [1, 2] обычно реализуется в виде двух связанных, но раздельно используемых систем: ручной и полуавтоматической (фиг.4). Каждая из этих систем имеет свой датчик управляющего воздействия, но общее исполнительное устройство - рулевой привод 7 ручной системы, который создает регулирующее воздействие на объект управления Fвых. В полуавтоматической системе имеется свой рулевой агрегат 6, но включен он последовательно с рулевым приводом ручной системы 7. Датчик управляющего воздействия рукоятка управления 9 с демпфером 10 имеет датчик углового положения 11, который создает сигнал уставки для замкнутой следящей системы, включающей, кроме рулевого агрегата и рулевого привода, еще усилитель-преобразователь 5, датчик регулируемой величины 4 объекта управления 8. В системах управления скоростью полета в отличие от систем управления угловым положением в качестве исполнительного устройства применяется электрический привод исполнительный механизм автомата тяги. В электродистанционной ручной системе датчик управляющего воздействия представляет собой минирукоятку 1 с пружинным загружателем 2 и датчиком углового положения рукоятки 3. Связь между датчиком управляющего воздействия оператора и рулевым приводом электрическая. В ручных системах с непосредственным управлением рулевым приводом эта связь механическая. Как в ручной, так и в полуавтоматической системах для контроля регулируемой величины Xвы х объекта 8 используется дистанционный указатель, включающий усилитель-преобразователь 12, двигатель 13, связанный через редуктор 14 с генератором 16 и стрелкой 15. Генератор является датчиком скоростной обратной связи и может быть выполнен в виде единого целого с двигателем как двигатель-генерадор. Датчик углового положения стрелки 17 может быть связан со стрелкой напрямую или через редуктор. Достоинством ручной системы является возможность управлять объектом по разомкнутой схеме и получать нужное установившееся движение без помехи, создаваемой переходным процессом замкнутого контура. Для этого требуется создавать кодирующие перемещения рукоятки, которые связаны с желаемым изменением регулируемой величины динамикой объекта. Недостатком ручных систем как с механической, так и электрической передачей сигнала управляющего воздействия к исполнительному устройству является большая загруженность зрения и внимания оператора функциями стабилизации, особенно при многоканальном управлении нейтральными и неустойчивыми объектами в случае действия на них меняющихся возмущений. Это ухудшает качество управления при одновременном решении оператором параллельных задач. Достоинством полуавтоматической системы является разгрузка зрения и внимания оператора от выполнения функций стабилизации, благодаря использованию автоматического контура стабилизации. Управление движением объекта осуществляется перемещениями рукоятки, копирующими желаемое перемещение объекта. Недостатком полуавтоматической системы является то, что автоматическая стабилизация происходит со статической ошибкой, устранение которой происходит с участием зрения и внимания оператора. Оператор должен обнаружить смещение летательного аппарата от заданного значения и скомпенсировать это смещение, изменив на величину ошибки заданное значение. Желательно разгрузить зрение и внимание оператора, создав измеритель возмущения, предназначенный для восприятия возмущения и подсознательного реагирования на него рукой оператора. Другим недостатком полуавтоматической системы являются динамические ошибки слежения объекта за перемещениями рукоятки, обусловленные переходными процессами в замкнутом контуре стабилизации. Обычно этот недостаток рекомендуют устранять применением дополнительной прямой связи от рукоятки к исполнительному устройству через обратную передаточную функцию объекта, превращая полуавтоматическую следящую систему в комбинированную систему, инвариантную по задающему воздействию [9]. Те хническая реализация обратной передаточной функции объекта является трудной задачей для конструктора. Возможен другой путь комбинирования сигналов в системе управления. Сигнал дополнительной прямой связи на входе исполнительного устройства эквивалентен сигналу ручной системы и поэтому может быть им заменен. В этом случае необходимо одновременно и координированно управлять как ручной, так и полуавтоматической системами. Если считать основным сигналом сигнал ручной системы, то сигнал полуавтоматической системы нужно формировать из основного сигнала ручной системы через передаточную функцию объекта, которую реализовать легче. Поэтому возникла идея комбинированной ручной системы управления. В этой системе управление объектом осуществляется ручной системой - по разомкнутой схеме. Размыкание обратной связи объекта осуществляется подачей сигнала на полуавтоматический вход равного и противоположного по знаку сигналу обратной связи. Это размыкание необходимо для того, чтобы обратная связь не мешала ручному управлению. Стабилизация объекта в этой системе осуществляется контуром обратной связи полуавтоматической системы. Входным воздействием в этом случае является возмущающее воздействие на объект. Сделана попытка на вертолете реализовать комбинированную ручн ую систему только техническими средствами в виде системы совмещенного управления углом тангажа (фиг.5). Она представляет собой простое объединение ручной и полуавтоматических систем [10]. Одновременная работа двух систем достигается установкой датчика 3 углового положения рукоятки полуавтоматической системы, называемого компенсационным, на рукоятке 1. Однако сигнал компенсационного датчика перед подачей на вход полуавтоматической системы не преобразуется звеном с передаточной функцией объекта, а подается напрямую. В результате полной компенсации в переходном процессе сигнала обратной связи сигналом компенсационного датчика не происходит, и контур обратной связи, состоящий из датчика регулируемой величины 4, усилителя 5, рулевого агрегата 6, объекта 8, мешает ручному управлению. При этом характер управляющих действий меняется с ручного на полуавтоматический, хотя сохраняется пружинный загружатель рычага управления ручной системы. Благодаря автоматической стабилизации, осуществляемой обратной связью полуавтоматической системы и помогающей пилоту управлять вертолетом, когда он неустойчив, этой системой часто пользуются пилоты. Однако при этом забываются навыки управления ручной системой, что при отказе полуавтоматической системы затрудняет управление. В связи с указанными недостатками системы совмещенного управления существует надобность в таком объединении ручной и полуавтоматической систем, при котором сохранялся бы характер управляющих усилий, системы работали бы одновременно, между управляющими усилиями была бы необходимая координация и имелась бы возможность ручной компенсации возмущения. Для этого необходимо: перейти к электродистанционной системе ручного управления, рукоятку дистанционного управления заменить на предлагаемый пульт ручного управления и стабилизации, соединить предлагаемый пульт с исполнительным контуром ручной системы по схеме обратимой следящей системы управления, а именно: выход усилителяпреобразователя пульта соединить с рулевым приводом, выход датчика регулируемой величины соединить со входом усилителя-преобразователя пульта. В результате эти х изменений получается предлагаемая система ручного управления и стабилизации, изображенная на фиг.6. Необходимость перехода к электродистанционной системе в данном случае диктуется сложностью механической передачи на современных летательных аппаратах, наличием в ней нежесткости, люфтов, что делает ее грубой и непригодной для предлагаемой системы. Необходимость использования предлагаемого пульта вытекает из требования сохранить характер управляющих усилий оператора и координацию между ними. Предлагаемая система эквивалентна двум системам: ручной и полуавтоматической, работающим одновременно и координировано. Это следует из эквивалентной схемы представленной в нижней части (п.6) фиг.7. На этой схеме пульт ручного управления представлен в виде раздельных датчиков: управляющего воздействия Fр ручной системы и задающего воздействия Xпа полуавтоматической системы. Предлагаемая система управления представлена замкнутым исполнительным контуром с двумя входами от датчиков управляющего и задающего воздействий, Датчик управляющего воздействия ручной системы описывает пульт управления при опережении (или отставании) рукоятки Xр относительно регулируемой величины Xвых объекта. Датчик задающего воздействия описывает пульт управления при пропорциональных изменениях нейтрального положения рукоятки Xпа и регулируемой величины объекта Xвы х. Управляющее воздействие оператора Fр на рукоятку пульта управления обеспечивает такой же по характеру входной сигнал Xр, как и в ручной системе, благодаря действию "электрической" пружины. Отличие пульта управления от штурвала и дистанционной рукоятки с механическими пружинными загружателями в том, что величина смещения рукоятки от нейтрали мала из-за большой жесткости "электрической" пружины, однако этого смещения достаточно, чтобы с помощью усилителя-преобразователя создать сигнал нужной величины на входе исполнительного устройства. Благодаря этому отличию, при передаче к исполнительному устройству информации об усилии оператора, как управляющем воздействии, рукоятка практически стоит на месте. Управляющее воздействие Fр оператора в предлагаемой системе (при условии пренебрежения переходными процессами в пульте управления и исполнительном устройстве) можно считать пропорциональным регулирующему воздействию Fвых. где Kf - коэффициент пропорциональности. Для того, чтобы сохранить нужный характер усилия ручной системы Fр при изменении нейтрального положения рукоятки, оператор должен приложить дополнительное усилие к рукоятке Fпа, как в полуавтоматической системе, для преодоления сопротивления "электрического" демпфера. Необходимую координацию между управляющими усилиями Fр и Fпа, обеспечивающими комбинированный характер предлагаемой ручной системы, создает сам оператор. Заданное с помощью усилия Fпа нейтральное положение рукоятки Xпа воспринимается через датчик положения рукоятки исполнительным контуром как задающее воздействие полуавтоматической системы. В предлагаемой системе существует связь между управляющим воздействием ручной системы Fр и задающим воздействием полуавтоматической системы Xпа через передаточную функцию объекта W0. Это следует из эквивалентной схемы предлагаемой системы, изображенной в верхней части (п.а) фиг.7. П ульт управления представлен датчиком управляющего воздействия Fр и указателем регулируемой величины объекта Xвы х, на который действует синхронизирующее усилие оператора Fпа. Система управления представлена разомкнутым исполнительным контуром со входами по двум управляющим усилиям Fр и Fпа . При подаче на вход п ульта управления сигнала регулируемой величины Xвых с одновременным синхронизирующим воздействием Fпа нейтральное положение рукоятки Xпа изменяется пропорционально регулируемой величине объекта. где K1 - коэффициент пропорциональности. Связь между регулируемой величиной и регулирующим воздействием определяется передаточной функцией объекта W0. Подстановкой в уравнение (3) значений Xвых и Fвых из уравнений (1) и (2) находится результирующая связь между усилием оператора Fр и перемещением нейтрального положения рукоятки Xпа. Она также определяется передаточной функцией объекта (с указанными ранее коэффициентами пропорциональности). Уравнение (4) доказывает то, что в предлагаемой системе рукоятка управления моделирует динамику объекта управления. Это является отличительным признаком предлагаемой системы, изменяющим способ ручного управления. Одновременно с моделированием рукояткой управление динамики летательного аппарата будет решаться и задача создания измерителя возмущения, предназначенного для передачи информации о возмущении руке оператора. Возмущающее воздействие Fв (фиг.6) компенсируется регулирующим воздействием исполнительного устройства системы управления, Сигнал компенсации после усилителяпреобразователя подается также и на двигатель пульта управления, который создает возмущающее воздействие на рукоятку управления. Если оператор удерживает рукоятку в неизменном положении, то усилие удержания Fу (после окончания переходных процессов в исполнительном контуре) будет пропорциональным возмущающему воздействию Fв . Способность предлагаемой системы передавать оператору информацию о возмущающем воздействии на объект управлений является отличительным признаком предлагаемой системы, изменяющим ручной способ стабилизации. Предлагаемая система ручного управления и стабилизации является обратимой следящей системой управления регулируемой величиной движения летательного аппарата. Математический анализ обратимой следящей системы для любых объектов управления дан в работе [11] на примере обратимой следящей системы, полученной путем функционального обобщения звеньев симметричного обратимого следящего привода, известного в роботах и манипуляторах. Этот анализ проведен с использованием математического аппарата четырехполюсников, известного в электротехнике. В процессе анализа входные усилия и скорости перемещения рукоятки задающего контура разложены на составляющие холостого хода и короткого замыкания, а сама обратимая система была интерпретирована замкнутым исполнительным контуром с двумя входами, между которыми существует соотношение, позволяющее представить ее как следящую систему, инвариантную по составляющей короткого замыкания. Найдено соотношение между входной силой холостого хода Fвххх и составляющей скорости перемещения рукоятки короткого замыкания Xвхкз, показаны условия, при которых это соотношение моделирует динамику объекта управления. В данной заявке анализ обратимой следящей системы использован для описания ручной, полуавтоматической, совмещенной и предлагаемой систем и способов управления и стабилизации этими системами. Входной силе холостого хода Fвххх соответствует управляющее усилие ручной системы Fр. Входной силе короткого замыкания Fвхкз соответствует управляющее усилие полуавтоматической системы Fпа. Составляющей скорости перемещения рукоятки холостого хода Xвххх соответствует отклонение рукоятки от нейтрального положения в ручной системе Xр. Составляющей скорости перемещения рукоятки короткого замыкания Xвхкз соответствуе т перемещение нейтрального положения рукоятки в полуавтоматической системе Xпа . В работе [12] дан анализ взаимодействия оператора с обратимой следящей системой при стабилизации объекта. Процесс стабилизации представлен совмещенным из двух компонент: ручной и автоматической. Рассмотрены условия, при которых ручная компонента компенсирует автоматическую и обеспечивает инвариантность совмещенной стабилизации по возмущающему воздействию. Найденные условия в заявке использованы при описании способа стабилизации с компенсацией возмущения без статических ошибок. Предлагаемая система работает следующим образом. При управлении (фиг.6) усилие оператора Fр вызывает небольшое смещение рукоятки Xр (десятые доли градуса), измеряемое датчиком 2 углового положения. После усиления этот сигнал подается на исполнительное устройство 12, которое поворачивает регулирующий орган, создавая регулирующее воздействие на объект Fвых. При условии пренебрежения переходными процессами в контуре рукоятки и исполнительном устройстве по сравнению с переходными процессами в самом объекте, можно считать регулирующее воздействие на объект Fвых пропорциональным усилию оператора Fр. Регулирующее воздействие вызывает движение объекта 13 и изменение регулируемой величины Xвы х, измеряемое датчиком регулируемой величины 11. Далее замкнутый контур рукоятки работает как следящая система. Для того, чтобы эта система воспроизводила без динамических ошибок регулируемую величину, необходимо приложить к рукоятке дополнительное усилие Fпа, как в полуавтоматической системе. Тогда нейтральное положение рукоятки Xпа будет синхронно повторять изменение регулируемой величины. Опережение углового положения рукоятки Xр относительно меняющейся нейтрали Xпа со храняется и продолжает вызывать желаемое изменение регулируемой величины. При стабилизации с удержанием рукоятки в неизменном положении усилием оператора Fу контур рукоятки размыкается, работает только контур объекта, который осуществляет стабилизацию, как в полуавтоматической системе со статической ошибкой регулируемой величины. Для стабилизации без статической ошибки оператор должен создать рукояткой опережение Xк , которое через исполнительное устройство объекта вызовет компенсирующее воздействие и предотвратит смещение объекта и возникновение статической ошибки регулируемой величины. При стабилизации со смещением нейтрали рукоятки и последующим возвращением нейтрали в исходное положение создается усилие на рукоятку, как в ручной системе, замыкаемой через оператора, с тем отличием, что усилие формируется по информации о положении, скорости изменения нейтрали рукоятки, а не самой регулируемой величины. Система ручного управления и стабилизации регулируемой величины летательного аппарата решает задачу совмещения ручной и полуавтоматической систем управления и стабилизации с координацией управляющего воздействия ручной системы с задающим воздействием полуавтоматической системы через передаточную функцию объекта управления. Технический результат, достигаемый с помощью системы ручного управления и стабилизации, состоит: в предметном моделировании рукояткой управления динамики движения летательного аппарата с использованием управляемого летательного аппарата и воспроизведении на рукоятке возмущающего воздействия на летательный аппарат. Этот технический результат обеспечивается связью пульта ручного управленим и стабилизации с исполнительным контуром по схеме обратимой следящей системы. Оператор является управляющей частью эргатической системы управления. Он выполняет функции формирования закона управления и реализует их в виде операций способа управления. Простейшей по управляющим функциям оператора системой является предметная эргатическая система (фиг.8). Учитывая имеющиеся данные [5, 6, 7] о человеке-операторе, эту систему можно представить в виде комбинированной системы управления. Комбинированность обеспечивается прямой командной связью нервно-мускульной системы Gп и кинестетической компенсирующей связью по внешней силе Gк . Первая связь описывает приспособление оператора к нагрузке, создаваемой различными предметами, находящимися в руке оператора Gн. Вторая связь описывает приспособление оператора к внешним силам, действующим на руку оператора Fв. Преобразование нервных импульсов в усилие интерпретируется звеном Gа. Кроме этого, имеется проприоцептивная обратная связь по смещению руки Gр, описывающая возможность управления рукой вслепую, и прямая связь через центральную нервную систему Gе , описывающая приспособление оператора к управлению предметами во внешнем мире. Имеются визуальные входы по желаемому, Xвх и действительному положению Xвых предмета во внешнем мире. Часть схемы, соответствующая центральной нервной системе и визуальным входам, считается одноканальным регулятором, подключаемым к разным каналам управления последовательно посредством центральных механизмов распределения и переключения внимания. Часть схемы, соответствующая нервномускульной системе, благодаря большому числу степеней свободы руки, считается многоканальной. Объектом управления GH в этой системе является предмет - простое орудие труда, находящееся в руке оператора. Закон управления, реализуемый оператором, зависит от динамики предмета, находящегося в руке оператора. Усилие Fр, прикладываемое рукой к предмету, связано с перемещением предмета вместе с рукой Xвых через передаточную функцию предмета Gн. Среди предметов, которыми способен управлять оператор, находятся предметы, создающие сопротивление, пропорциональное ускорению, скорости и перемещению предметов, а также комбинациям этих параметров, например, колебательные системы типа маятника с опорой вверху, не устойчивые системы типа маятника с опорой внизу. В перечень предметов, которыми способен управлять оператор, входят и механические системы предметов, имеющие передаточные функции, аналогичные летательным аппаратам. Управляя предметом как орудием труда оператор преодолевает сопротивление среды, на которую он воздействует. Это сопротивление воспринимается как возмущающее воздействие Fв и компенсируется нервно-мускульной системой оператора. Недостатком предметного способа является ограниченность усилий, перемещений, невозможность управления предметами на расстоянии, невозможность управления объектами немеханической природы. Достоинством предметного способа управления является высокое качество управления предметами, приспособляемость к предметам с различной и меняющейся динамикой и к различным и меняющимся возмущениям, а также возможность управления по нескольким каналам одновременно и координирование, с параллельным решением смысловых задач, занимающим зрение и внимание оператора. Достоинства предметного способа управления способствовали появлению идеи квазипредметного (будто бы предметного) способа управления. За рубежом эта идея высказана Джеймсом Герцогом [7, 8]. Он предложил разрабатывать рукоятку управления так, чтобы соотношение между силой, прикладываемой к рукоятке управления, и смещением рукоятки было таким же, как определяемое динамикой объекта соотношение между силой, прикладываемой к рукоятке, и выходом системы. Предметная модель динамики Джеймса Герцога реализована техническими средствами рукоятки, как датчика управляющих воздействий оператора, и не включает сам объект управления. В модели использована рукоятка одностороннего и необратимого действия. Она передает информацию только от оператора к объекту. В рукоятке нет обратной связи по регулируемой величине и возмущающему воздействию на объект управления. Поэтому при изменении динамики объекта управления и возмущающего воздействия на объект выход рукоятки будет отличаться от выхода объекта. Это снижает роль проприоцептивной и сухожильной обратных связей в разгрузке зрения и внимания оператора, влечет к ухудшению качества управления. В эргатической системе оператор дистанционная ручная система управления (фиг.9) объект управления W0 включен последовательно с оператором. Между оператором и объектом появились заместители объекта (рукоятка управления Gнр и указатель регулируемой величины), а также преобразователи: управляющего воздействия оператора в регулирующее воздействие на объект (рулевой привод) Wрп и регулируемой величины в сигнал для указателя (датчик указателя) Wду. Если считать, что динамика предмета и объекта управления одна и та же, пренебречь переходными процессами в преобразователях управляющего воздействия и регулируемой величины, то закон управления в дистанционной эргатической системе остается тот же, что и в предметной системе, однако реализуется он теми же структурами оператора иначе, чем в предметной системе. Поэтому способ дистанционного управления отличается от предметного. При управлении дистанционной системой контроль регулируемой величины возможен только визуально. Проприоцептивная обратная связь Gр обеспечивает управление рукояткой. Прямая командная связь нервно-мускульной системе Gп приспосабливается к динамике рукоятки. Приспособление же к динамике объекта берут на себя верхние уровни управления центральной нервной системы Gе. Поскольку, благодаря пружинным загружателям усилие руки Fр пропорционально смещению рукоятки относительно нейтрали Xр, воспринимаемому системой как управляющее воздействие оператора, то усилие оператора в дистанционной системе осталось то же, что и в предметной, однако перемещение рукоятки Xр под действием этого усилия не совпадает с регулируемой величиной Xвых. Поэтому в дистанционном способе у правления используются кодирующие, а не копирующие движения рукоятки. Это не естественные, а специальные профессиональные движения. Для их создания требуется специальное обучение. Навыки управления, построенные на таких движениях, разрушаются при длительных перерывах в работе, дают сбои при утомлении. Кроме этого, информация о регулируемой величине поступает через зрение с использованием центральных механизмов распределения и переключения внимания. При одновременном решении нескольких параллельных задач наряду с управлением движения объекта это ведет к дискретности восприятия и обработки информации, что ухудшает качество управления. Кроме этого, навыки распределения и переключения внимания являются специальными, профессиональными навыками, подверженными разрушению при перерывах в работе, дающими сбои при утомлении. В эргатической системе операторполуавтоматическая система управления (фиг.10) последовательно с оператором включается полуавтоматическая система управления объекта. С оператора сняты функции стабилизации, закон управления реализует регулятор Wрег, оператор задает уставку Xпа, система стабилизация ее отрабатывает. Отработку можно уже не контролировать. Визуальная обратная связь по регулируемой величине, которая была нужна в ручной системе, не нужна в полуавтоматической. Оператор должен воспроизводить желаемое движение объекта в виде изменений заданных значений регулируемой величины Xпа посредством рукоятки с задатчиком углового положения K3. Закон управления рукояткой - как в предметной системе. Управляемым предметом является задающая рукоятка Gнпа, имеющая сопротивление, пропорциональное скорости ее движения. Поэтому способ управления этой рукояткой предполагает создание усилия Fпа, пропорционального желаемой скорости движения объекта. Характер управляющих движений естественный, копирующий, специальное обучение не нужно. Система стабилизации противодействует возмущениям, обеспечивает устойчивость помимо оператора. Однако система стабилизации отрабатывает заданное значение с динамической ошибкой и противодействует возмущениям с динамической и статической ошибками. Величина этих ошибок зависит от динамики замкнутого контура стабилизации, и оператор не может изменить их величину. Объект плохо "ходит" за р укояткой. В эргатической системе оператор существующая система совмещенного управления (фиг.11) последовательно с оператором включается простая комбинация ручной и полуавтоматической систем. Комбинация простая потому, что связь между ручным и полуавтоматическим входами пропорциональная. Эта связь осуществляется с помощью компенсационного датчика Kд, сигнал с которого поступает на вход автопилота Wап. Перемещение штурвала с помощью механической передачи подается на ручной вход комбинированного рулевого привода Wрп, управляющего объектом управления W0. До объединения этих систем на их входы поступали различные сигналы и их рукоятки управления имели различные устройства загрузки. На вход ручной системы поступал сигнал смещения рукоятки Xр относительно нейтрального положения, загружатель был пружинный. На вход полуавтоматической системы поступал сигнал изменений нейтрального положения рукоятки Xпа. Загружатель был демпфирующий. При объединении систем рукоятка и загружатель остались от ручной системы Gн. Однако перемещения рукоятки для управления нужны такие же, как в полуавтоматической системе Xпа, т.е. копирующие, а не кодирующие, поскольку комбинация этих систем по принципу действия остается следящей системой, хотя и с дополнительной прямой связью. В связи с этим при управлении системой совмещенного управления для создания заданного перемещения рукоятки приходится прикладывать усилие Fс, отличающееся от усилий как в ручной системе Fр, так и в полуавтоматической Fпа. Приспособление к новому устройству загрузки системы совмещенного управления по сравнению с устройством загрузки полуавтоматической системы обеспечиваются внутри оператора прямой командной связью нервно-мускульной системе Gп. Трудностей при этом приспособлении у оператора не возникает. Однако при этом формируется новый навык управления и при частом его употреблений прежние навыки ручного и полуавтоматического управления забываются и надо заботиться об их поддержании. Кроме этого, сама система совмещенного управления не имеет координации между ручным и полуавтоматическим входами через передаточную функцию объекта управления, и поэтому остаются динамические ошибки следования объекта за рукояткой управления. Достоинства полуавтоматической системы в системе совмещенного управления сохраняются, т.е. контур автоматической стабилизации попрежнему обеспечивает устойчивость системы и противодействие возмущениям помимо оператора, хотя и со статической ошибкой. Можно избежать динамических ошибок воспроизведения заданной величины, проводя одновременно управление ручной и полуавтоматической системами двумя рукоятками и координируя усилие рукоятки в ручной системе Fр с перемещением рукоятки в полуавтоматической системе Xпа через модель передаточной функции объекта Wмд. Реализация этой модели оператором с помощью двух р укояток значительно усложняет способ управления. Реализация техническими средствами требует изменения параметров модели при изменении параметров самого объекта. Кроме этого, остается статическая ошибка стабилизации. Поэтому возникла потребность объединения рукояток и построения предметной модели передаточной функции объекта с использованием самого объекта. Эта проблема решается предлагаемой системой ручного управления и стабилизации, в которой обе рукоятки объединены в одну р укоятку, моделирующую динамику объекта, используя сам объект. В этом случае способ управления и стабилизации упрощается. В инструкции оператору предписывается: задавать желаемое значение регулируемой величины и стабилизировать ее на этом значении, задавая положение рукоятки и удерживая ее на заданном значении управляющим и стабилизирующим усилиями, формируемыми с помощью навыков непосредственного (предметного) управления и стабилизации рукоятки как механического аналога объекта управления и стабилизации. В эргатической системе операторпредлагаемая система ручного управления и стабилизации (фиг.12) при управлении объектом оператор посредством прямой командной связи нервно-мускульной системе Gп, реализующей обратную передаточную функцию объекта, преобразует желаемое перемещение объекта Xвх в управляющее усилие на рукоятку управления Fр, такое же по характеру, как в ручной системе управления. Под действием этого усилия рукоятка W1 смещается относительно нейтрали, как в ручной системе. Величина этого смещения Xр, его скорость Xр измеряются датчиками углового положения W2 и генератором W3. Сигнал смещения после усиления усилителем W4 подается на двигатель W5, который создает противодействие усилию оператора и останавливает это смещение. Величина смещения рукоятки Xр, благодаря большому коэффициенту усиления усилителя-преобразователя, имеет пренебрежимо малую величину. Оператор не замечает этого смещения, воспринимает рукоятку как неподвижную и ощущает только ее сопротивление, равное своему усилию. Сигнал этого смещения после усиления преобразуется исполнительным устройством и регулирующим органом объекта Wрп в регулирующее воздействие на объект Fвых и вызывает его движение Xвых. Датчик регулируемой величины Wду измеряет это движение и подает сигнал на вход пульта управления, который работает как следящая система, воспроизводящая в виде изменений нейтрального положения рукоятки Xпа регулируемую величину объекта Xвых. Оператор создает дополнительное усилие Fпа , пропорциональное скорости движения рукоятки, как в полуавтоматической системе. Это усилие синхронизирует изменения нейтрального положения рукоятки и регулируемой величины объекта Xвых. Изменение нейтрального положения рукоятки Xпа под действием усилия, аналогичного усилию в р учной системе Fр, предметно моделирует динамику объекта. Причем при моделировании используется реальный объект W0. Если меняется его динамика, то меняется и динамика предметной модели. Благодаря синхронизирующему усилию, аналогичному усилию в полуавтоматической системе, изменение регулируемой величины компенсируется изменением нейтрального положения и контур обратной связи по регулируемой величине размыкается и не мешает ручному управлению. В связи с тем, что наряду с основным усилием, вызывающим желаемое движение объекта, оператор прикладывает дополнительное синхронизирующее усилие Fпа, пропорциональное скорости движения объекта, рукоятка, как механический аналог, объекта, эквивалентна демпфированному объекту. При ручной стабилизации объекта возможны варианты способа стабилизации в зависимости от принципа стабилизации, реализуемого оператором: по возмущению и по отклонению. При ручной стабилизации по возмущению (фиг.13) контур объекта совместно с двигателем рукоятки G21и используется как измеритель возмущения. В ответ на усилие рукоятки, действующее на руку, оператор с помощью компенсирующей кинестетической связи создает усилие F s, противоположно направленное и большее, чем возмущающее воздействие рукоятки Fу на руку оператора на величину усилия компенсации Fk. Это усилие предлагаемой системой ручного управления, моделирующей рукояткой динамику объекта Wмд, преобразуется в компенсирующее перемещение рукоятки Xк . Далее компенсирующее смещение рукоятки преобразуется исполнительным контуром объекта G12 и в изменение регулируемой величины объекта, равное по величине и противоположное по знаку изменению регулируемой величины от возмущающего воздействия, создаваемому исполнительным контуром объекта G11и. В результате суммарное изменение регулируемой величины равно нулю. По отношению к усилию F s, созданному с помощью кинестетической связи Gк , компенсирующее смещение рукоятки Xк является смещением относительно нейтрали, Оно не сопровождается смещением самой нейтрали рукоятки. В связи с отсутствием смещения нейтрального положения рукоятки проприоцептивная чувстви тельность Gр оператора не действует. При ручной стабилизации по отклонению (фиг.14) оператор допускает смещение нейтрального положения рукоятки Xупа в сторону возмущения, прикладывая противодействующее усилие Fос, пропорциональное этому смещению и скорости смещения. Это усилие создается нервномускульной системой оператора по сигналам проприоцептивной чувстви тельности, реагирующей на смещение нейтрального положения руки вместе с рукояткой. Благодаря этому усилию, смещение нейтрального положения рукоятки прекращается. При этом возникает также и смещение рукоятки относительно нейтрали Xур, аналогичное компенсирующему перемещению Xк . Поэтому суммарный результат преобразования возмущающего воздействия Fв и смещения рукоятки относительно нейтрали Xур исполнительным контуром объекта с передаточными функциями G12и , G 11 и на вы ходе равен нулю. В отличие от стабилизации по возмущению при стабилизации по отклонению на выходе объекта появляется изменение регулируемой величины Xвых в результате преобразования исполнительным контуром с передаточной функцией G12и смещения нейтрального положения рукоятки Xупа. Величина смещения нейтрального положения рукоятки под действием возмущения зависит от жесткости, демпфирования и начального положения позы руки, которые регулируются оператором. Возможен частный случай ручной стабилизации по отклонению, когда смещение нейтрального положения рукоятки Xпа под действием возмущения равно по величине и противоположно по знаку смещению рукоятки от нейтрали Xур от усилия оператора. В этом случае контур рукоятки этим усилием размыкается, а стабилизацию объекта осуществляет только контур объекта G11и, как в полуавтоматической системе, при неизменной уставке. Эта стабилизация осуществляется со статической ошибкой, величина которой невелика благодаря большой жесткости "электрической" пружины рукоятки. Способ управления и стабилизации регулируемой величины движения летательного аппарата решает задачу разгрузки зрения и внимания оператора для решения параллельных задач за счет включения кинестезии оператора в процесс управления и стабилизации регулируемой величиной движения летательного аппарата. Технический результат, достигаемый в эргатической системе оператор - ручная система управления и стабилизации, реализующей способ управления и стабилизации, состоит в повышении точности, быстродействия, устойчивости процесса управления регулируемой величиной движения летательного аппарата при одновременном решении параллельных задач. Этот технический результат обеспечивают с помощью системы ручного управления и стабилизации применением для управления и стабилизации регулируемой величины движения летательного аппарата навыков непосредственно (предметного) управления рукояткой, имеющей динамику, аналогичную динамике летательного аппарата. Ручной системой управления и стабилизации: воспринимают управляющее и стабилизирующее усилия оператора на рукоятку управления и создают регулирующее воздействие на летательный аппарат; отображают в динамике рукоятки управления регулируемую величину, регулирующее и возмущающее воздействия на летательный аппарат. Управляющим и стабилизирующим усилиями оператора задают желаемое значение регулируемой величины движения летательного аппарата и стабилизируют ее на этом значении, задавая положение рукоятки, пропорциональное желаемому значению, и удерживая рукоятку в заданном положении. На фиг.1 показана структурная схема дистанционной рукоятки управления; на фиг.2 структурная схема дистанционного указателя; на фиг.3 - структурная схема пульта ручного управления и стабилизации; на фиг.4 - структурная схема связи ручной и полуавтоматической систем управления; на фиг.5 - структурная схема существующей системы совмещенного управления вертолета; на фиг.6 - стр уктурная схема предлагаемой системы ручного управления и стабилизации движения летательного аппарата; на фиг.7 эквивалентные структурные схемы предлагаемой системы ручного управления и стабилизации движения летательного аппарата; на фиг.8 гипотетическая структурная схема предметной эргатической системы; на фиг.9 структурная схема эргатической системы оператор дистанционная ручная система управления; на фиг.10 - структурная схема эргатической системы оператор полуавтоматическая система управления; на фиг.11 - стр уктурная схема эргатической системы оператор - существующая система совмещенного управления при управлении; на фиг.12 - структурная схема эргатической системы оператор - предлагаемая система ручного управления и стабилизации при управлении; на фиг.13 - стр уктурная схема эргатической системы оператор - предлагаемая система ручного управления и стабилизации при стабилизации с компенсацией ошибки; на фиг.14 структурная схема эргатической системы оператор - предлагаемая система ручного управления и стабилизации при стабилизации с регулируемой ошибкой; на фиг.15 - переходный процесс пульта ручного управления и стабилизации; на фиг.16 фигура Лиссажу предлагаемой системы ручного управления и стабилизации вертолетом по тангажу; на фиг.17 - то же, по рысканию; на фиг.18 - фигура Лиссажу существующей системы совмещенного управления вертолетом по тангажу; на фиг.19 - то же, ручного управления вертолетом по рысканию; на фиг.20 - фазовая траектория разворота самолета по углу тангажа со стабилизацией скорости полета существующими ручными системами управления первым оператором; на фиг.21 - то же, вторым оператором; на фиг.22 - то же, предлагаемыми системами ручного управления и стабилизации первым оператором; на фиг.23 - то же, вторым оператором; на фиг.24 - фазовая траектория стабилизации вертолета на крену и рысканию существующими ручными системами первым оператором; на фиг.25 - то же, вторым оператором; на фиг.26 - фазовая траектория стабилизации вертолета по крену и рысканию предлагаемыми системами ручного управления и стабилизации первым оператором; на фиг.27 - то же, вторым оператором; на фиг.28 фазовая траектория разворота вертолета по крену и рысканию существующими ручными системами первым оператором; на фиг.29 - фазовая траектория разворота вертолета по крену и рысканию предлагаемыми системами ручного управления и стабилизации первым оператором; на фиг.30 - процесс программного управления вертолетом по рысканию существующей р учной системой третьим оператором; на фиг.31 - процесс программного управления вертолетом по рысканию предлагаемой системой ручного управления и стабилизации третьим оператором; на фиг.32 - процесс программного управления вертолетом по тангажу существующей системой совмещенного управления четвертым оператором; на фиг.33 - процесс программного управления вертолетом по тангажу предлагаемой системой ручного управления и стабилизации четвертым оператором. Из известных технических устройств, построенных по схеме замкнутой системы непрямого регулирования углового положения объекта, включающих вы ходной вал, датчик углового положения выходного вала, двигательгенератор с редуктором, характеристики близкие к желаемым характеристикам пульта управления, имеют электрические сервоприводы автопилотов. Они представляют собой следящие системы, работающие при нагрузках на выходном валу того же порядка, что и управляющее воздействие оператора и имеют того же порядка диапазон угловы х перемещений и угловых скоростей, что и объект управления. По сравнению с пультом в сервоприводе меньше коэффициент передачи усилителя и нет на выходном валу рукоятки управления. Для конкретного исполнения предлагаемого пульта управления были использованы рулевая машина и магнитный усилитель-преобразователь мощности автопилота АП-28П1 самолета АН-24. В качестве общего суммирующего усилителя контуров рукоятки и объекта использовался усилитель-преобразователь постоянного тока аналоговой вычислительной машины МН-10м. Предлагаемая система ручного управления и стабилизации воспроизводилась методом полунатурного моделирования. Два пульта управления, описанные выше, были созданы в натуре. Исполнительные устройства, объект управления, датчики регулируемой величины моделировались на аналоговой вычислительной машине МН-10м. В качестве объекта управления в одном эксперименте моделировалось продольное движение самолета ТУ-154, в другом - продольное и боковое движение вертолета МИ-6. Одновременно с объектом моделировались исполнительные устройства ручных и полуавтоматических систем управления, датчики регулируемой величины полуавтоматической системы и дистанционные указатели этих воздушных судо в. В системах управления продольным движением самолета один пульт использовался для управления углом тангажа, другой пульт для управления скоростью полета. В системах управления боковым движением вертолета один пульт использовался для управления углом крена, другой - для управления углом рыскания. В системах управления продольным движением вертолета использовался один пульт управления углом тангажа. Пульты управления путем изменения коэффициента усиления усилителя, отключения обратных связей по регулируемой величине объекта (угловому положению или скорости полета), а также угловому положению рукоятки переводились в режим моделирования датчиков управляющих воздействий ручной, совмещенной систем управления. Эффективность предлагаемого пульта ручного управления и стабилизации оценивалась точностью, быстродействием воспроизведения рукояткой управления значения регулируемой величины при изменении управляющего воздействия оператора на рукоятку управления. Критериями точности были выбраны величина статической ошибки воспроизведения при максимальном управляющем воздействии оператора и величина перерегулирования переходного процесса при снятии управляющего воздействия. Критерием быстродействия было выбрано время регулирования, определяемое по моменту вхождения переходного процесса в трубк у допуска 10%. Предлагаемый пульт ручного управления и стабилизации, как замкнутая система непрямого регулирования положения рукоятки управления, испытывался путем снятия переходного процесса углового положения рукоятки при снятии скачком управляющего воздействия оператора. Измерялись: смещение углового положения рукоятки относительно нейтрали Xр под действием управляющего усилия оператора (как статическая ошибка), величина перерегулирования s и время регулирования tрег. Вид переходного процесса пульта управления и результаты измерения указанных выше, параметров представлены на фиг.15. Эти результаты показывают, что переходный процесс в пульте управления заканчивается за 0,4с, перерегулирование равно 15%, статическая ошибка 0,3 градуса при скачке момента 8,8нм. При временах управления, измеряемых несколькими секундами, диапазоне изменения нейтрального положения рукоятки, измеряемом десятками градусов, эти данные дают основание пренебрегать переходными процессами пульта управления (временем регулирования и статической ошибкой) при рассмотрении процессов в системе оператор - объект управления. Величина смещения рукоятки ручной системы при том же усилии оператора 5кг на плече 0,16м составляла 26град. Тот же момент сопротивления рукоятки полуавтоматической системы возникал при скорости ее перемещения до 90град./с. Эффективность систем управления оценивалась точностью воспроизведения регулируемой величиной заданных рукояткой значений. Критерием точности был выбран сдвиг фаз DF между изменениями заданной dр и регулируемой Xвых величин. При испытании системы рукояткой управления задавались синусоидальные колебания углового положения вертолета и определялся сдвиг фаз между колебаниями рукоятки и вертолета по фигурам Лиссажу. Для этого на самописце по оси ординат записывались колебания вертолета y, n, а по оси абсцисс колебания dр рукоятки. Эти фигуры представлены на фиг.16, фиг.17 для предлагаемой системы ручного управления, на фиг.18 - для существующей системы совмещенного управления, на фиг.19 - для существующей системы ручного управления. Замкнутая кривая фигуры Лиссажу аппроксимировалась эллипсом. Сдвиг фаз для предлагаемой и совмещенной систем управления оценивался по формуле: где Amax значение амплитуды сигнала регулируемой величины; A0 - текущее значение сигнала регулируемой величины в момент нулевого значения сигнала рукоятки. Сдвиг фаз для существующей ручной системы оценивался по формуле Предлагаемая система в вертолетном варианте испытывалась методом полунатурного моделирования путем сравнения с существующей системой совмещенного управления по тангажу и существующей ручной системой по рысканию. Сравнение с существующей ручной системой по рысканию проводилось в предвидении будущих трехкоординатных рукояток управления вертолетом по тангажу, крену, рысканию (скольжению). Результаты оценки точности по сдвигу фаз приведены в табл.1. Из данных, приведенных в табл.1, следует, что точность воспроизведения угловым положением вертолета углового положения рукоятки в существующей системе совмещенного управления выше, чем в существующей ручной, в 11 раз, а в предлагаемой системе ручного управления и стабилизации выше, чем в существующей системе совмещенного управления, в 2,5 раза. Предлагаемые и существующие способы ручного управления и стабилизации испытывались методом полунатурного моделирования с участием оператора, причем для сравнения систем использованы две интерпретации предлагаемой системы. Согласно первой интепретации предлагаемая система эквивалентна двум системам: ручной и полуавтоматической, работающим одновременно и координирование за счет оператора, На самолете нет режима одновременной работы обеих систем. Такой режим, называемый совмещенным, есть только на вертолете. Причем совмещение работы ручной и автоматической систем осуществляется техническими средствами. Для оценки эффективности вариантов распределения функций координации работы ручной и полуавтоматической систем между оператором и автоматом целесообразно сравнение способа управления предлагаемой системой ручного управления и стабилизации со способом управления существующей системой совмещенного управления. Такое сравнение возможно и проведено только для вертолета. Согласно второй интерпретации предлагаемая система ручного управления эквивалентна ручной системе управления с новым указателем регулируемой величины. Для оценки эффективности способов управления ручными системами с разными указателями целесообразно сравнение способа управления предлагаемой системой ручного управления со способами управления существующими системами ручного управления. Это возможно и проведено как для самолетов, так и вертолетов. В качестве операторов для испытаний способов управления и стабилизации были отобраны: профессионал-пилот самолета ТУ-134, профессионал-инженер по системам управления самолетов, два профессионала-инженера по системам управления вертолетов, профессионалинженер по системам управления самолетов и вертолетов и непрофессионал - выпускник средней школы. Участие в испытаниях профессионалов по системам управления самолетов и вертолетов сократило процесс обучения, уменьшило число тренировочных проб управления до четырех. Пятая проба управления была зачетной. Участие непрофессионала было необходимо для выявления возможностей управления предлагаемой системой на основе навыков непосредственного (предметного) управления рукояткой. Перед пробами управления операторы были обучены диапазонам управляющих усилий, перемещений рукояток, связи направлений усилий, перемещений рукояток с направлением и скоростью изменения регулируемой величины. Всем операторам сообщался ориентировочный закон управления, который они должны были реализовать в способе управления. Он соответствовал управлению медленными составляющими переходных процессов линейных моделей самолетов и вертолетов. Ориентировочный закон корректировался при выполнении тренировочных проб управления самим оператором. При управлении продольным движением самолета оператору ставилась задача в канале управление углом тангажа перевести самолет из исходного углового положения в заданное, в канале управления скоростью полета - удержать скорость полета неизменной. При стабилизации бокового движения вертолета оператору ставилась задача удержать в неизменном положении вертолет по углу крена и рыскания при воздействии возмущающего момента вокруг продольной оси. При управлении боковым движением вертолета оператору ставилась задача перевести вертолет из исходного углового положения в заданное сразу по двум каналам: крена и рыскания при возмущающем моменте вокруг продольной оси. Системы управления вертолетом по рысканию и тангажу были испытаны в задаче программного управления. Заданная программа изменения угла тангажа или рыскания была составлена из двух полукосинусоид одного периода и разных амплитуд, состыкованных друг с др угом. Возмущающее воздействие отсутствовало. Формулировки законов управления для предлагаемого способа отличались от формулировок для ручного способа тем, что вместо отклонения рукоятки указывалось усилие на рукоятку, вместо перемещений и скоростей перемещений объекта указывались перемещения и скорости перемещения нейтрального положения рукоятки. Эффективность способов управления и стабилизации оценивалась точностью эргатических систем. Критерием точности перевода самолета из исходного углового положения в заданное было выбрано максимальное значение обратного хода объекта во время перевода Dn max и отклонение от заданного значения в конце перевода Dn k. Критерием точности стабилизации скорости полета было выбрано максимальное отклонение скорости от заданного значения Dvmax и отклонение от заданного значения в конце перевода Dvk. В качестве примера представлены записи типичных процессов управления (n, v) двух операторов в виде фазовых траекторий на фиг.20, 21 для существующего р учного способа и на фиг.22, 23 для предлагаемого ручного способа. Результаты оценки этих процессов по указанным критериям приведены в табл.2. Из данных табл.2 следует, что предлагаемый ручной способ позволяет точнее перевести самолет из исходного углового положения в заданное и точнее удержать скорость полета на заданном значении, чем существующий ручной способ, примерно в 2 раза. Критерием точности стабилизации вертолета одновременно по углу крена и рыскания были выбраны максимальные отклонения углового положения по углу крена и рыскания. Для примера взяты фазовые траектории процессов: на фиг.24, 25 - для существующего р учного способа, на фиг.26, 27 - для предлагаемого ручного способа. Результаты оценки процессов управления по указанным критериям для обоих способов приведены в табл.3. Из данных табл.3 следует, что стабилизация углового положения в боковом канале предлагаемым ручным способом на порядок точнее, чем существующим ручным способом, при этом возможна ручная стабилизация без ошибок. Критериями точности разворотов вертолета на заданные углы (по крену и рысканию одновременно) были выбраны отклонения от заданного значения углового положения в конце разворота (Dgk, Dy k) и максимальные значения возвратного движения во время разворота (Dgmax, Dy max). Для примера представлены фазовые траектории процессов управления одного и того же оператора: на фиг.28 - существующим ручным способом, на фиг.29 - предлагаемым ручным способом. Результаты оценки этих процессов по указанным критериям представлены в табл.4. Из данных табл.4 следует, что точность вывода вертолета в заданное угловое положение предлагаемым ручным способом может быть в несколько раз выше, чем существующим ручным способом управления. Кроме этого, во время разворота предлагаемым ручным способом не создается возвратных движений. Критерием точности программного управления вертолетом по углам тангажа и рыскания были выбраны отклонения амплитуд и полупериодов большого и малого колебаний от заданных программой значений Аб , Ам , Тб /2, Тм /2. В качестве примера приведены записи процессов программного управления: по углу рыскания y - на фиг.30 существующим ручным и на фиг.31 предлагаемым ручным способами третьим оператором, а также по углу тангажа n - на фиг.32 существующим совмещенным, на фиг.33 предлагаемым ручным способами управления четвертым оператором. Результаты оценки процессов программного управления по углу рыскания y приведены в табл.5, а по углу тангажа n - в табл.6. Из данных, приведенных в табл.5, 6, следуе т, что программное управление предлагаемым ручным способом в 2 - 3 раза точнее, чем существующим ручным или существующим совмещенным способами. В сводной табл.7 систематизированы результаты оценки точности управления самолетом и вертолетом. Из данных, приведенных в табл.7, следует, что предлагаемая система ручного управления позволяет увеличить в несколько раз точность вывода воздушного судна в заданное угловое положение (как во время вывода, так и в конце его), а также точность стабилизации в исходном положении. Это позволит оператору воздушного судна решать задачи более высокого класса за меньшее время с меньшими затратами на управление: ресурса техники, расхода топлива, своего здоровья.
ДивитисяДодаткова інформація
Автори англійськоюKashmatov Viktor Yosypovych
Автори російськоюКашматов Виктор Иосифович
МПК / Мітки
МПК: B64C 13/00
Мітки: спосіб, регульованої, керування, аржесан, система, величини, ручного, апарата, руху, стабілізації, пульт, літального
Код посилання
<a href="https://ua.patents.su/21-26286-pult-sistema-ta-sposib-ruchnogo-keruvannya-ta-stabilizaci-regulovano-velichini-rukhu-litalnogo-aparata-arzhesan.html" target="_blank" rel="follow" title="База патентів України">Пульт, система та спосіб ручного керування та стабілізації регульованої величини руху літального апарата “аржесан”</a>
Система дренажу і наддува паливних баків літального апарата нейтральним газом
Номер патенту: 12901
Опубліковано: 28.02.1997
Автори: Колесніченко Ігор Макарович, Оксентюк Олег Борисович
МПК: B64D 37/00
Мітки: апарата, нейтральним, газом, баків, літального, паливних, система, наддува, дренажу
Формула / Реферат:
(57) Система дренажа и наддува топливных баков летательного аппарата нейтральным газом, содержащая коллекторный трубопровод, сообщающий баки выработки топлива с центральным баком, который соединен магистралью через пневмокран с заборником дренажа, двухпозиционнный переключатель в коллекторном трубопроводе, трубопровод сброса газа, подключенный к одному из выходных каналов переключателя, трубопровод подачи нейтрального газа в баки с...
Система управління двигуновою установкою літального апарата
Номер патенту: 18763
Опубліковано: 25.12.1997
Автори: Іщук Віктор Петрович, Распопов Євген Вікторович, Світський Олег Лазаревич, Епельбаум Анатолій Григорович
МПК: B64D 31/00
Мітки: двигуновою, літального, установкою, управління, система, апарата
Формула / Реферат:
Система управления двигательной установкой летательного аппарата, содержащая рычаг управления двигателем, кинематически соединенный с электрическим приводом и датчиком угла отклонения рычага управления двигателем, механизм подачи топлива, кран топливного агрегата, блок аэродинамических данных, блок расчета требуемой тяги, выход которого соединен с делителем, отличающаяся тем, что она дополнительно снабжена блоком расчета командной тяги,...
Система підготовки повітря для літального апарата з турбореактивним двоконтурним двигуном
Номер патенту: 18544
Опубліковано: 25.12.1997
Автори: Донцов Володимир Олександрович, Ерастов Євген Володимирович, Омельченко Микола Іванович
МПК: B64D 13/00
Мітки: повітря, турбореактивним, двоконтурним, двигуном, система, літального, підготовки, апарата
Формула / Реферат:
1. Система подготовки воздуха для летательного аппарата с турбореактивным двухконтурным двигателем, содержащая воздуховоздушный теплообменник, горячая линия которого соединена магистралью отбора воздуха с компрессором двигателя и сообщена с кабиной летательного аппарата, а продувочная линия соединена воздуховодом с вентиляторным контуром двигателя и сообщена с атмосферой, заслонку регулятора расхода и температуры, установленную в воздуховоде,...
Система перекачування палива з магістралі заправлення літального апарата
Номер патенту: 13080
Опубліковано: 28.02.1997
Автори: Попов Валентин Георгійович, Меркулов Юрій Валентинович, Соколовський Микола Миколайович
МПК: B64D 37/00
Мітки: палива, літального, заправлення, магістралі, система, перекачування, апарата
Формула / Реферат:
(57) Система перекачки топлива из магистралей заправки летательного аппарата, содержащая вертикальные участки магистралей заправки и слива топлива, заправочные и сливные краны, левый и правый магистральные краны, выключатели управления перекачкой, заправочного и сливного кранов, шину электропитания, сигнализаторы давления и сливной насос в магистрали слива, отличающаяся тем, что вертикальные участки магистралей заправки соединены между собой...
Спосіб стабілізації кутового руху літальнього апарату

Номер патенту: 16950
Опубліковано: 29.08.1997
Автори: Дронь Микола Михайлович, Натушкін Володимир Федорович
МПК: B64C 13/00
Мітки: руху, кутового, літального, спосіб, апарату, стабілізації
Попередній патент: Спосіб гнуття труб
Наступний патент: Розпилювач рідини
Випадковий патент: Спосіб рентгенологічного обстеження кульшового суглоба під час виконання блокуючого інтрамедулярного остеосинтезу