Спосіб і пристрій стійкого векторного прогнозувального квантування параметрів лінійного прогнозування у кодуванні мови з змінною бітовою швидкістю

Формула / Реферат
1. Спосіб квантування параметрів лінійного прогнозування у кодуванні звукового сигналу з змінною бітовою швидкістю, який включає:
- прийом вхідного вектора параметрів лінійного прогнозування;
- класифікацію кадру звукового сигналу, що відповідає вхідному вектору параметрів лінійного прогнозування;
- обчислення вектора прогнозу;
- видалення обчисленого вектора прогнозу з вхідного вектора параметрів лінійного прогнозування для отримання вектора помилок прогнозування;
- масштабування вектора помилок прогнозування і квантування масштабованого вектора помилок прогнозування, причому
- обчислення вектора прогнозу включає вибирання однієї з сукупності схем прогнозування відповідно до класифікації кадру звукового сигналу і обчислення вектора прогнозу згідно з вибраною схемою; і
- масштабування вектора помилок прогнозування включає вибирання щонайменше однієї схеми з сукупності схем масштабування відповідно до вибраної схеми прогнозування і масштабування вектора помилок згідно з вибраною схемою прогнозування.
2. Спосіб за п. 1, який відрізняється тим, що квантування параметрів лінійного прогнозування включає обробку вектора помилок прогнозування щонайменше одним квантизатором з використанням вибраної схеми прогнозування.
3. Спосіб за п. 1, який відрізняється тим, що сукупність схем прогнозування включає прогнозування рухомого середнього і авторегресивне прогнозування.
4. Спосіб за п. 1, який відрізняється тим, що додатково включає:
- формування вектора середніх параметрів лінійного прогнозування і
- видалення вектора середніх параметрів лінійного прогнозування з вхідного вектора параметрів лінійного прогнозування для отримання вектора параметрів лінійного прогнозування з видаленими середніми.
5. Спосіб за п. 1, який відрізняється тим, що
- класифікація кадру звукового сигналу включає визначення того, що цей кадр є стаціонарно звуковим кадром;
- вибирання однієї з сукупності схем прогнозування включає вибирання авторегресивного прогнозування;
- обчислення вектора прогнозу включає обчислення вектора помилок авторегресивного прогнозування;
- вибирання однієї з сукупності схем масштабування включає вибирання масштабного коефіцієнта; і
- масштабування вектора помилок прогнозування включає масштабування вектора помилок прогнозування перед квантуванням з застосуванням зазначеного масштабного коефіцієнта.
6. Спосіб за п. 1, який відрізняється тим, що
- класифікація кадру звукового сигналу включає визначення того, що цей кадр не є стаціонарно звуковим кадром;
- обчислення вектора прогнозу включає обчислення вектора помилок прогнозування рухомого середнього.
7. Спосіб за п. 5, який відрізняється тим, що масштабний коефіцієнт перевищує 1.
8. Спосіб за п. 1, який відрізняється тим, що квантування вектора помилок прогнозування включає обробку вектора помилок прогнозування з застосуванням двостадійного процесу векторного квантування.
9. Спосіб за п. 8, який відрізняється тим, що додатково включає застосування розщепленого векторного квантування у двостадійному процесі векторного квантування.
10. Спосіб за п. 3, який відрізняється тим, що:
- квантування вектора помилок прогнозування включає обробку вектора помилок прогнозування з застосуванням двостадійного процесу векторного квантування, який включає першу і другу стадії; і
- обробка вектора помилок прогнозування з застосуванням двостадійного процесу векторного квантування включає застосування вектора помилок прогнозування до векторних квантувальних таблиць першої стадії, однакових як для авторегресивного прогнозування, так і для прогнозування рухомого середнього.
11. Спосіб за п. 8, який відрізняється тим, що квантування вектора помилок прогнозування включає:
- квантування вектора помилок прогнозування у першій стадії двостадійного процесу векторного квантування для формування квантованого вектора помилок прогнозування першої стадії;
- видалення квантованого вектора помилок прогнозування першої стадії з вектора помилок прогнозування;
- квантування вектора помилок прогнозування у другій стадії двостадійного процесу векторного квантування для формування квантованого вектора помилок прогнозування другої стадії; і
- формування квантованого вектора помилок прогнозування складанням квантованих векторів помилок прогнозування першої і другої стадій.
12. Спосіб за п. 11, який відрізняється тим, що квантування вектора помилок прогнозування другої стадії включає обробку вектора помилок прогнозування другої стадії квантизатором прогнозування рухомого середнього або квантизатором авторегресивного прогнозування залежно від класифікації кадру звукового сигналу.
13. Спосіб за п. 8, який відрізняється тим, що квантування вектора помилок прогнозування включає:
- формування індексів квантування для двох стадій двостадійного процесу векторного квантування;і
- передачу індексів квантування через канал зв'язку.
14. Спосіб за п. 8, який відрізняється тим, що:
- класифікація кадру звукового сигналу включає визначення того, що цей кадр звукового сигналу є стаціонарно звуковим кадром; і
- обчислення вектора прогнозу включає:
- складання (а) квантованого вектора помилок прогнозування, отриманого складанням квантованих векторів помилок прогнозування першої і другої стадій, і (b) обчисленого вектора прогнозу для отримання квантованого вхідного вектора; і
- обробку квантованого вхідного вектора через авторегресивне прогнозування.
15. Спосіб за п. 2, який відрізняється тим, що:
- сукупність схем прогнозування включає прогнозування рухомого середнього і авторегресивне прогнозування;
- квантування вектора помилок прогнозування включає:
- обробку вектора помилок прогнозування двостадійним векторним квантизатором, який має кодувальну книжку першої стадії, яка включає:
першу групу векторів, придатних для використання у прогнозуванні рухомого середнього, розташовану на початку таблиці;
другу групу векторів, придатних для використання у прогнозуванні як рухомого середнього, так і у авторегресивному прогнозуванні, розташовану між першою і третьої групами векторів;
третю групу векторів, придатних для використання у авторегресивному прогнозуванні, розташовану у кінці таблиці;
- обробка вектора помилок прогнозування щонайменше одним квантизатором з використанням вибраної схеми прогнозування включає:
- обробку вектора помилок прогнозування з використанням першої і другої груп векторів таблиці, якщо вибраною схемою прогнозування є прогнозування рухомого середнього; і
- обробку вектора помилок прогнозування з використанням другої і третьої груп векторів таблиці, якщо вибраною схемою прогнозування є авторегресивне прогнозування.
16. Спосіб за п. 15, який відрізняється тим, що для уможливлення взаємодії з стандартом AMR-WB за допомогою таблиці відображень створено відображення між положенням вектора першої стадії у таблиці і первісним положенням вектора першої стадії у кодувальній книжці AMR-WB першої стадії.
17. Спосіб за п. 1, який відрізняється тим, що:
- класифікація кадру звукового сигналу включає визначення того, що цей кадр є стаціонарно або нестаціонарно звуковим кадром; і
- у випадку стаціонарно звукового кадру:
- вибирання однієї з сукупності схем прогнозування відповідно до класифікації кадру звукового сигналу включає вибирання авторегресивного прогнозування,
- обчислення вектора прогнозу згідно з вибраною схемою прогнозування включає обчислення вектора помилок прогнозування з застосуванням авторегресивного прогнозування,
- вибирання однієї з сукупності схем прогнозування відповідно до класифікації кадру звукового сигналу включає вибирання масштабного коефіцієнта, що перевищує 1, і
- масштабування вектора помилок прогнозування згідно з вибраною схемою масштабування включає масштабування вектора помилок прогнозування перед квантуванням з застосуванням масштабного коефіцієнта, що перевищує 1;
- у випадку нестаціонарно звукового кадру:
- вибирання однієї з сукупності схем прогнозування відповідно до класифікації кадру звукового сигналу включає вибирання прогнозування рухомого середнього,
- обчислення вектора прогнозу згідно з вибраною схемою прогнозування включає обчислення вектора помилок прогнозування з застосуванням прогнозування рухомого середнього,
- вибирання однієї з сукупності схем прогнозування відповідно до класифікації кадру звукового сигналу включає вибирання масштабного коефіцієнта, що дорівнює 1, і
- масштабування вектора помилок прогнозування згідно з вибраною схемою масштабування включає масштабування вектора помилок прогнозування перед квантуванням з застосуванням масштабного коефіцієнта, що дорівнює 1.
18. Спосіб деквантування параметрів лінійного прогнозування у декодуванні звукового сигналу з змінною бітовою швидкістю, який включає:
- прийом щонайменше одного індексу квантування;
- прийом інформації про класифікацію кадру звукового сигналу відповідно до зазначеного щонайменше одного індексу квантування;
- відновлення вектора помилок прогнозування застосуванням цього щонайменше одного індексу квантування до щонайменше однієї квантувальної таблиці;
- реконструювання вектора прогнозу; і
- формування вектора параметрів лінійного прогнозування згідно з відновленим вектором помилок прогнозування і реконструйованим вектором прогнозу;
причому реконструювання вектора прогнозу включає обробку відновленого вектора помилок прогнозування згідно з однією з сукупності схем прогнозування залежно від інформації про класифікацію кадру.
19. Спосіб за п. 18, який відрізняється тим, що відновлення вектора помилок прогнозування включає застосування щонайменше одного індексу квантування до щонайменше однієїквантувальної таблиці з використанням зазначеної однієї схеми прогнозування.
20. Спосіб за п. 18, який відрізняється тим, що:
- прийом щонайменше одного індексу квантування включає прийом індексу квантування першої стадії і індексу квантування другої стадії; і
- застосування щонайменше одного індексу квантування до щонайменше однієї квантувальної таблиці включає застосування індексу квантування першої стадії до квантувальної таблиці першої стадії для отримання вектора помилок прогнозування першої стадії і застосування індексу квантування другої стадії до квантувальної таблиці другої стадії для отримання вектора помилок прогнозування другої стадії.
21. Спосіб за п. 20, який відрізняється тим, що:
- сукупність схем прогнозування включає прогнозування рухомого середнього і авторегресивне прогнозування;
- квантувальна таблиця другої стадії включає таблицю прогнозування рухомого середнього і таблицю авторегресивного прогнозування; і
- додатково включає застосування класифікації кадру звукового сигналу до квантувальної таблиці другої стадії для використання індексу квантування другої стадії у таблиці прогнозування рухомого середнього або у таблиці авторегресивного прогнозування залежно від прийнятої класифікаційної інформації кадру.
22. Спосіб за п. 20, який відрізняється тим, що відновлення вектора помилок прогнозування включає складання вектора помилок прогнозування першої стадії з вектором помилок прогнозування другої стадії для формування відновленого вектора помилок прогнозування.
23. Спосіб за п. 22, який відрізняється тим, що додатково включає виконання над відновленим вектором прогнозу операції зворотного масштабування як функції прийнятої класифікаційної інформації кадру.
24. Спосіб за п. 18, який відрізняється тим, що формування вектора параметрів лінійного прогнозування включає складання відновленого вектора помилок прогнозування з реконструйованим вектором прогнозу для отримання вектора параметрів лінійного прогнозування.
25. Спосіб за п. 24, який відрізняється тим, що додатково включає складання вектора середніх помилок прогнозування з відновленим вектором помилок прогнозування і з реконструйованим вектором прогнозу для отримання вектора параметрів лінійного прогнозування.
26. Спосіб за п. 18, який відрізняється тим, що:
- сукупність схем прогнозування включає прогнозування рухомого середнього і авторегресивне прогнозування; і
- реконструювання вектора прогнозу включає обробку відновленого вектора помилок прогнозування з застосуванням прогнозування рухомого середнього або обробку отриманого вектора параметрів з застосуванням авторегресивного прогнозування залежно від класифікаційної інформації кадру.
27. Спосіб за п. 26, який відрізняється тим, що реконструювання вектора прогнозу включає:
- обробку отриманого вектора параметрів з застосуванням авторегресивного прогнозування, коли класифікаційна інформація кадру вказує, що кадр звукового сигналу є стаціонарно звуковим; і
- обробку отриманого вектора параметрів з застосуванням прогнозування рухомого середнього, коли класифікаційна інформація кадру вказує, що кадр звукового сигналу не є стаціонарно звуковим.
28. Пристрій для квантування параметрів лінійного прогнозування у кодуванні звукового сигналу з змінною бітовою швидкістю, який включає:
- засіб прийому вхідного вектора параметрів лінійного прогнозування;
- засіб класифікації кадру звукового сигналу, що відповідає вхідному вектору параметрів лінійного прогнозування;
- засіб обчислення вектора прогнозу;
- засіб видалення обчисленого вектора прогнозу з вхідного вектора параметрів лінійного прогнозування для отримання вектора помилок прогнозування;
- засіб масштабування вектора помилок прогнозування; і
- засіб квантування масштабованого вектора помилок прогнозування;
причому
- засіб обчислення вектора прогнозу включає засіб вибирання однієї схеми з сукупності схем прогнозування відповідно до класифікації кадру звукового сигналу і засіб обчислення вектора прогнозу згідно з вибраною схемою; і
- засіб масштабування вектора помилок прогнозування включає засіб вибирання щонайменше однієї схеми з сукупності схем масштабування відповідно до вибраної схеми прогнозування і засіб масштабування вектора помилок прогнозування згідно з вибраною схемою прогнозування.
29. Пристрій для квантування параметрів лінійного прогнозування у кодуванні звукового сигналу з змінною бітовою швидкістю, який включає:
- вхід для прийому вхідного вектора параметрів лінійного прогнозування;
- класифікатор кадру звукового сигналу відповідно до вхідного вектора параметрів лінійного прогнозування;
- обчислювач вектора прогнозу;
- вузол віднімання для видалення обчисленого вектора прогнозу з вхідного вектора параметрів лінійного прогнозування для отримання вектора помилок прогнозування;
- вузол масштабування вектора помилок прогнозування; і
- квантизатор масштабованого вектора помилок прогнозування;
причому
- обчислювач вектора прогнозу включає селектор для вибирання однієї схеми з сукупності схем прогнозування відповідно до класифікації кадру звукового сигналу і для обчислення вектора прогнозу згідно з вибраною схемою; і
- вузол масштабування включає селектор для вибирання щонайменше однієї схеми з сукупності схем масштабування відповідно до вибраної схеми прогнозування і для масштабування вектора помилок згідно з вибраною схемою прогнозування.
30. Пристрій за п. 29, який відрізняється тим, що квантизатор отримує вектор помилок прогнозування для обробки зазначеного вектора згідно з вибраною схемою прогнозування.
31. Пристрій за п. 29, який відрізняється тим, що сукупність схем прогнозування включає прогнозування рухомого середнього і авторегресивне прогнозування.
32. Пристрій за п. 29, який відрізняється тим, що додатково включає:
- засіб формування вектора середніх параметрів лінійного прогнозування; і
- вузол віднімання для видалення вектора середніх параметрів лінійного прогнозування з вхідного вектора параметрів лінійного прогнозування і отримання цим вектора параметрів лінійного прогнозування з видаленими середніми.
33. Пристрій за п. 29, який відрізняється тим, що, коли класифікатор визначає, що кадр звукового сигналу є стаціонарно голосовим кадром, обчислювач вектора прогнозу включає авторегресивний прогнозатор для застосування авторегресивного прогнозування до вектора помилок прогнозування.
34. Пристрій за п. 29, який відрізняється тим, що, коли класифікатор визначає, що кадр звукового сигналу не є стаціонарно голосовим кадром, обчислювач вектора прогнозу включає прогнозатор рухомого середнього для застосування прогнозування рухомого середнього до вектора помилок прогнозування.
35. Пристрій за п. 33, який відрізняється тим, що вузол масштабування включає вузол множення для застосування до вектора помилок прогнозування масштабного коефіцієнта, більшого за 1.
36. Пристрій за п. 29, який відрізняється тим, що квантизатор включає двостадійний векторний кванти затор.
37. Пристрій за п. 36, який відрізняється тим, що двостадійний векторний квантизатор включає дві стадії, де застосовується розщеплене векторне квантування.
38. Пристрій за п. 31, який відрізняється тим, що
- квантизатор включає двостадійний векторний квантизатор, який має першу і другу стадії; і
- двостадійний векторний квантизатор включає квантувальні таблиці першої стадії, які є ідентичними як для прогнозування рухомого середнього, так і для авторегресивного прогнозування.
39. Пристрій за п. 36, який відрізняється тим, що двостадійний векторний квантизатор включає:
- векторний квантизатор першої стадії, який приймає вектор помилок прогнозування для квантування зазначеного вектора помилок прогнозування і формування квантованого вектора помилок прогнозування першої стадії;
- вузол віднімання для видалення квантованого вектора помилок прогнозування першої стадії з вектора помилок прогнозування для отримання вектора помилок прогнозування другої стадії;
- векторний квантизатор другої стадії, який приймає вектор помилок прогнозування другої стадії для квантування зазначеного вектора помилок прогнозування другої стадії і формування квантованого вектора помилок прогнозування другої стадії; і
- суматор для отримання квантованого вектора помилок прогнозування складанням квантованих векторів помилок прогнозування першої і другої стадій.
40. Пристрій за п. 39, який відрізняється тим, що векторний квантизатор другої стадії включає:
- векторний квантизатор другої стадії рухомого середнього для квантування вектора помилок прогнозування другої стадії з застосуванням прогнозування рухомого середнього; і
- векторний авторегресивний квантизатор другої стадії для квантування вектора помилок прогнозування другої стадії з застосуванням авторегресивного прогнозування.
41. Пристрій за п. 36, який відрізняється тим, що двостадійний векторний квантизатор включає:
- векторний квантизатор першої стадії для формування індексу квантування першої стадії;
- векторний квантизатор другої стадії для формування індексу квантування другої стадії; і
- передавач для передачі індексів квантування першої і другої стадій через канал зв'язку.
42. Пристрій за п. 39, який відрізняється тим, що, якщо класифікатор визначає, що цей кадр звукового сигналу є стаціонарно звуковим кадром, обчислювач вектора прогнозу включає:
- суматор для складання (а) квантованого вектора помилок прогнозування, отриманого складанням квантованих векторів помилок прогнозування першої і другої стадій, з (b) обчисленим вектором прогнозу для отримання квантованого вхідного вектора; і
- авторегресивний прогнозатор для обробки квантованого вхідного вектора.
43. Пристрій за п. 30, який відрізняється тим, що:
- сукупність схем прогнозування включає прогнозування рухомого середнього і авторегресивне прогнозування;
- квантизатор включає:
- двостадійний векторний квантизатор, який має кодувальну книжку першої стадії, яка включає:
першу групу векторів, придатних для використання у прогнозуванні рухомого середнього, розташовану на початку таблиці;
другу групу векторів, придатних для використання у прогнозуванні як рухомого середнього, так і у авторегресивному прогнозуванні, розташовану між першою і третьою групами векторів;
третю групу векторів, придатних для використання у авторегресивному прогнозуванні, розташовану у кінці таблиці;
- засіб обробки вектора помилок прогнозування включає:
- засіб обробки вектора помилок прогнозування з використанням першої і другої груп векторів таблиці, якщо вибраною схемою прогнозування є прогнозування рухомого середнього; і
- засіб обробки вектора помилок прогнозування з використанням другої і третьої груп векторів таблиці, якщо вибраною схемою прогнозування є авторегресивне прогнозування.
44. Пристрій за п. 43, який відрізняється тим, що для уможливлення взаємодії з стандартом AMR-WB додатково включає таблицю відображень, яка встановлює відображення між положенням вектора першої стадії у цій таблиці і первісним положенням між положенням вектора першої стадії у цій таблиці і первісним положенням вектора першої стадії у кодувальній книжці AMR-WB першої стадії.
45. Пристрій за п. 31, який відрізняється тим, що:
- обчислювач вектора прогнозу включає авторегресивний прогнозатор для застосування авторегресивного прогнозування до вектора помилок прогнозування і прогнозатор рухомого середнього для застосування прогнозування рухомого середнього до вектора помилок прогнозування; і
- авторегресивний прогнозатор і прогнозатор рухомого середнього мають відповідні пам'яті, які оновлюються з кожним кадром звукового сигналу, за припущення, що прогнозування рухомого середнього і авторегресивне прогнозування можуть бути використані у наступному кадрі.
46. Пристрій для деквантування параметрів лінійного прогнозування у декодуванні звукового сигналу з змінною бітовою швидкістю, який включає:
- засіб прийому щонайменше одного індексу квантування;
- засіб прийому інформації про класифікацію кадру звукового сигналу відповідно до зазначеного щонайменше одного індексу квантування;
- засіб відновлення вектора помилок прогнозування застосуванням цього щонайменше одного індексу квантування до щонайменше однієї квантувальної таблиці;
- засіб реконструювання вектора прогнозу; і
- засіб формування вектора параметрів лінійного прогнозування згідно з відновленим вектором помилок прогнозування і реконструйованим вектором прогнозу;
причому засіб реконструювання вектора прогнозу включає засіб обробки відновленого вектора помилок прогнозування згідно з схемою з сукупності схем прогнозування залежно від інформації про класифікацію кадру.
47. Пристрій для деквантування параметрів лінійного прогнозування у декодуванні звукового сигналу з змінною бітовою швидкістю, який включає:
- засіб прийому щонайменше одного індексу квантування;
- засіб прийому інформації про класифікацію кадру звукового сигналу відповідно до зазначеного щонайменше одного індексу квантування;
- щонайменше одну квантувальну таблицю для відновлення вектора помилок прогнозування через застосування до неї щонайменше одного індексу квантування;
- вузол реконструювання вектора прогнозу;
- генератор вектора параметрів лінійного прогнозування відповідно до відновленого вектора помилок прогнозування і реконструйованого вектора прогнозу,
причому вузол реконструювання вектора прогнозу включає щонайменше один прогнозатор, який приймає відновлений вектор помилок прогнозування для обробки цього відновленого вектора помилок прогнозування згідно з схемою з сукупності схем прогнозування залежно від інформації про класифікацію кадру.
48. Пристрій за п. 47, який відрізняється тим, що зазначена щонайменше одна квантувальна таблиця включає квантувальну таблицю, що використовує зазначену одну схему прогнозування і приймає на її входах зазначений щонайменше один індекс і класифікаційну інформацію.
49. Пристрій за п. 47, який відрізняється тим, що:
- засіб прийому індексу квантування має два входи для прийому індексу квантування першої стадії і індексу квантування другої стадії; і
- зазначена щонайменше одна квантувальна таблиця включає квантувальну таблицю першої стадії, яка приймає індекс квантування першої стадії для визначення вектора помилок прогнозування першої стадії, і квантувальну таблицю другої стадії, яка приймає індекс квантування другої стадії для визначення вектора помилок прогнозування другої стадії.
50. Пристрій за п. 49, який відрізняється тим, що:
- сукупність схем прогнозування включає прогнозування рухомого середнього і авторегресивне прогнозування;
- квантувальна таблиця другої стадії включає таблицю прогнозування рухомого середнього і таблицю авторегресивного прогнозування; і
- додатково включає засіб застосування класифікації кадру звукового сигналу до квантувальної таблиці другої стадії для використання індексу квантування другої стадії у таблиці прогнозування рухомого середнього або у таблиці авторегресивного прогнозування залежно від прийнятої класифікаційної інформації кадру.
51. Пристрій за п. 49, який відрізняється тим, що додатково включає суматор для складання вектора помилок прогнозування першої стадії з вектором помилок прогнозування другої стадії для отримання відновленого вектора помилок прогнозування.
52. Пристрій за п. 51, який відрізняється тим, що додатково включає пристрій виконання над відновленим вектором прогнозу операції зворотного масштабування як функції прийнятої класифікаційної інформації кадру.
53. Пристрій за п. 47, який відрізняється тим, що генератор вектора параметрів лінійного прогнозування включає суматор для складання відновленого вектора помилок прогнозування з реконструйованим вектором прогнозу для отримання вектора параметрів лінійного прогнозування.
54. Пристрій за п. 53, який відрізняється тим, що додатково включає засіб складання вектора середніх помилок прогнозування з відновленим вектором помилок прогнозування і з реконструйованим вектором прогнозу для отримання вектора параметрів лінійного прогнозування.
55. Пристрій за п. 47, який відрізняється тим, що:
- сукупність схем прогнозування включає прогнозування рухомого середнього і авторегресивне прогнозування; і
- вузол реконструювання вектора прогнозу включає прогнозатор рухомого середнього і авторегресивний прогнозатор для обробки відновленого вектора помилок прогнозування з застосуванням прогнозування рухомого середнього або обробки отриманого вектора параметрів з застосуванням авторегресивного прогнозування залежно від класифікаційної інформації кадру.
56. Пристрій за п. 55, який відрізняється тим, що вузол реконструювання вектора прогнозу включає:
- засіб обробки отриманого вектора параметрів з застосуванням авторегресивного прогнозування, коли класифікаційна інформація кадру вказує, що кадр звукового сигналу є стаціонарно звуковим; і
- засіб обробки отриманого вектора параметрів з застосуванням прогнозування рухомого середнього, коли класифікаційна інформація кадру вказує, що кадр звукового сигналу не є стаціонарно звуковим.
57. Пристрій за п. 55, який відрізняється тим, що:
- зазначений щонайменше один прогнозатор включає авторегресивний прогнозатор для застосування авторегресивного прогнозування до вектора помилок прогнозування і прогнозатор рухомого середнього для застосування прогнозування рухомого середнього до вектора помилок прогнозування; і
- авторегресивний прогнозатор і прогнозатор рухомого середнього мають відповідні пам'яті, які оновлюються з кожним кадром звукового сигналу, за припущення, що прогнозування рухомого середнього і авторегресивне прогнозування можуть бути використані у наступному кадрі.
Текст
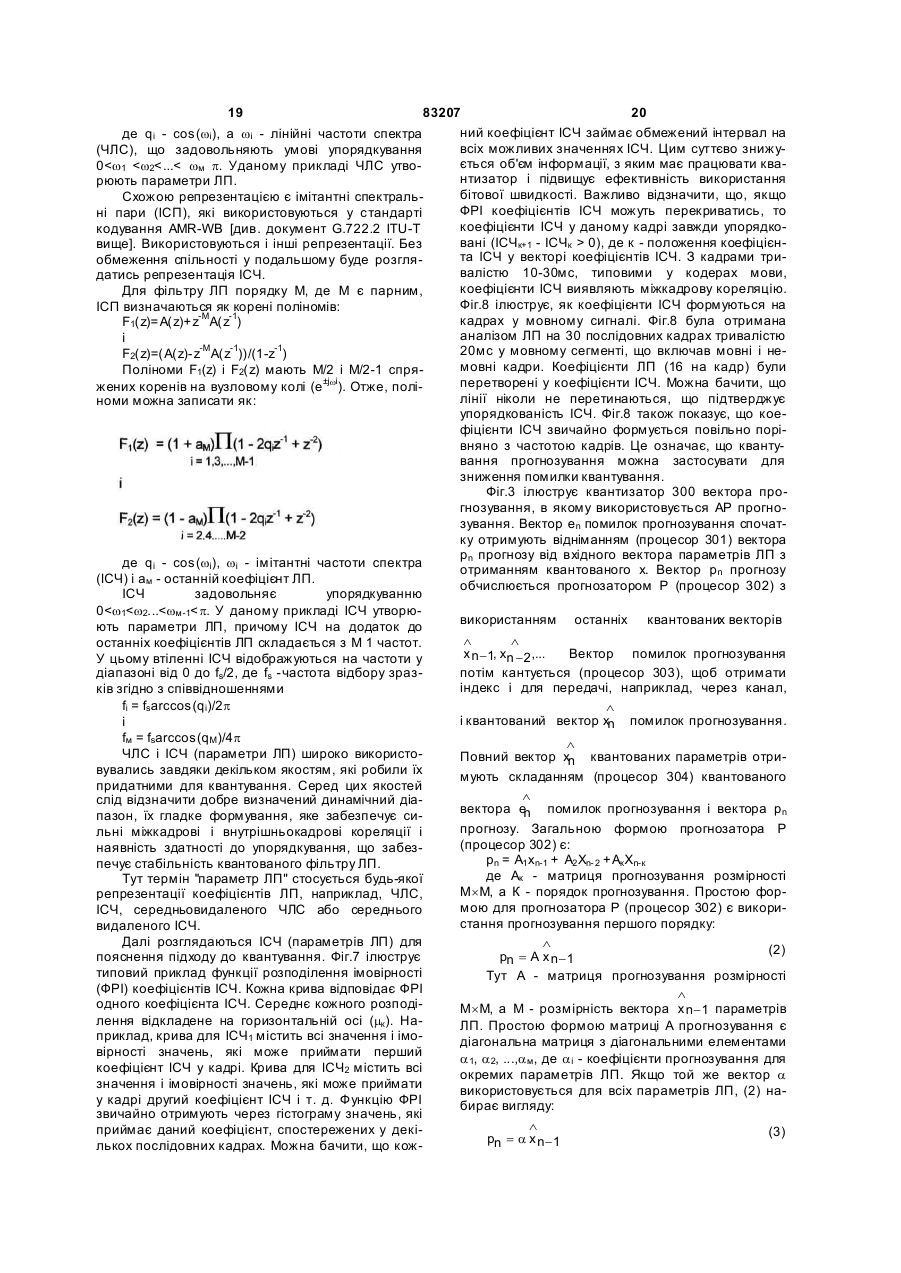
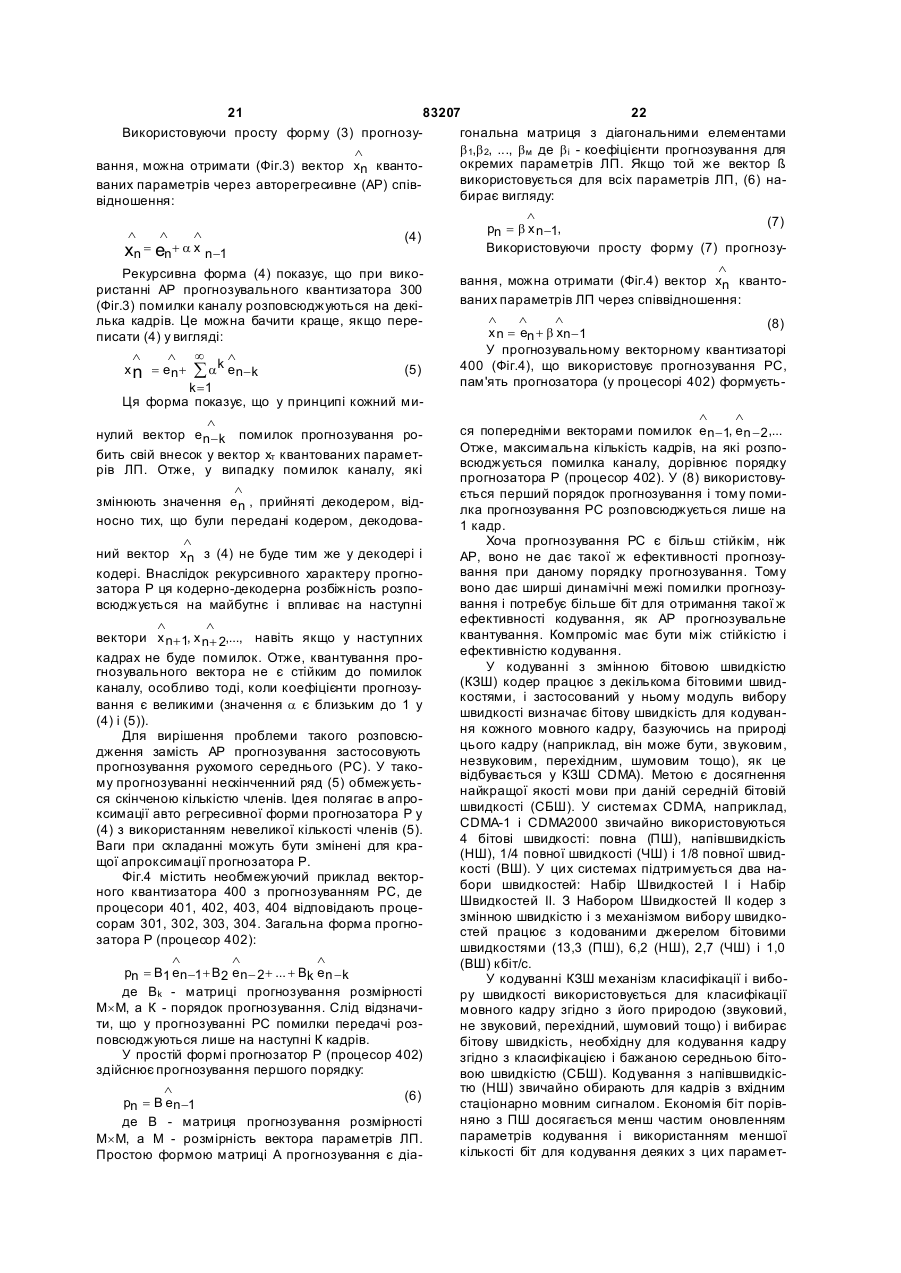
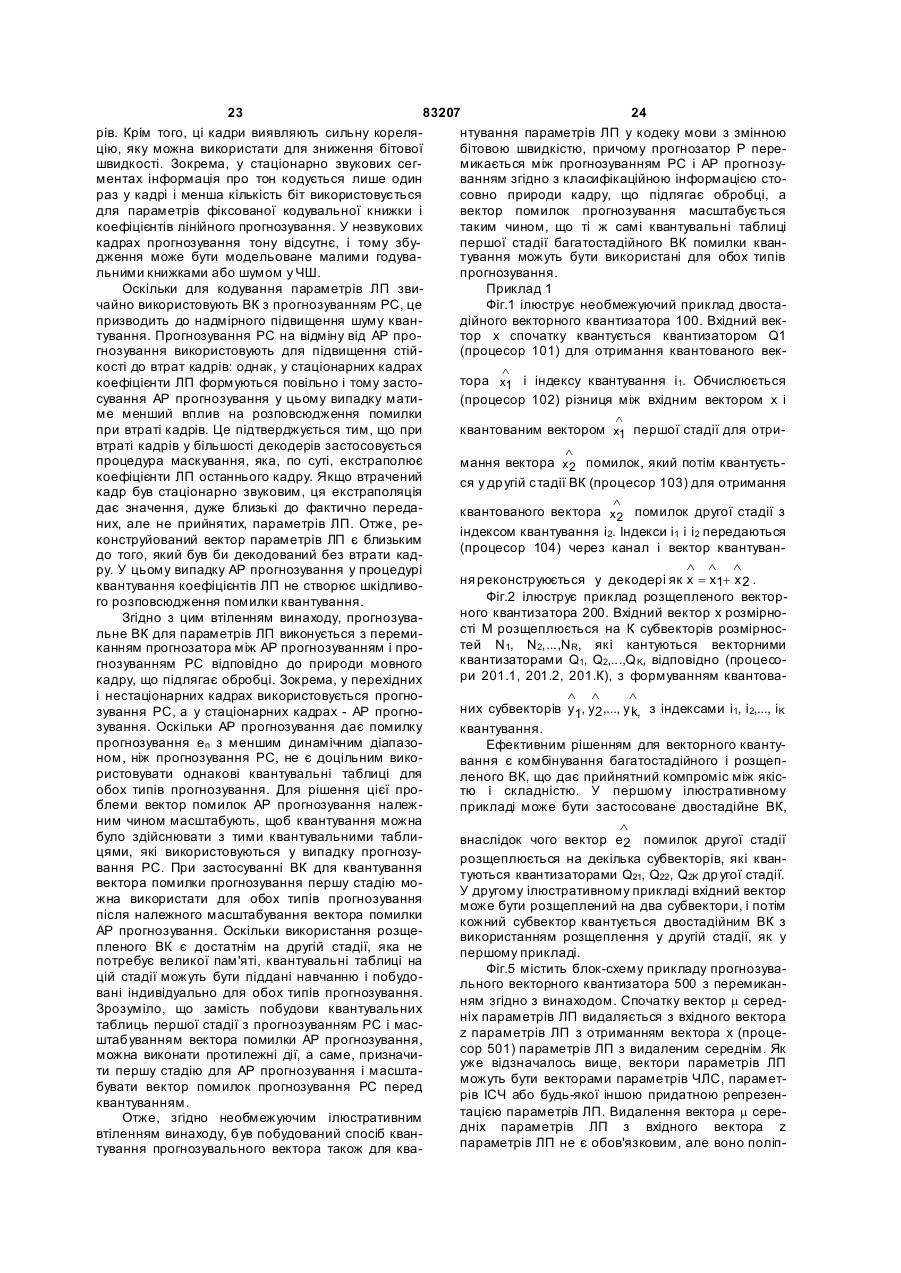
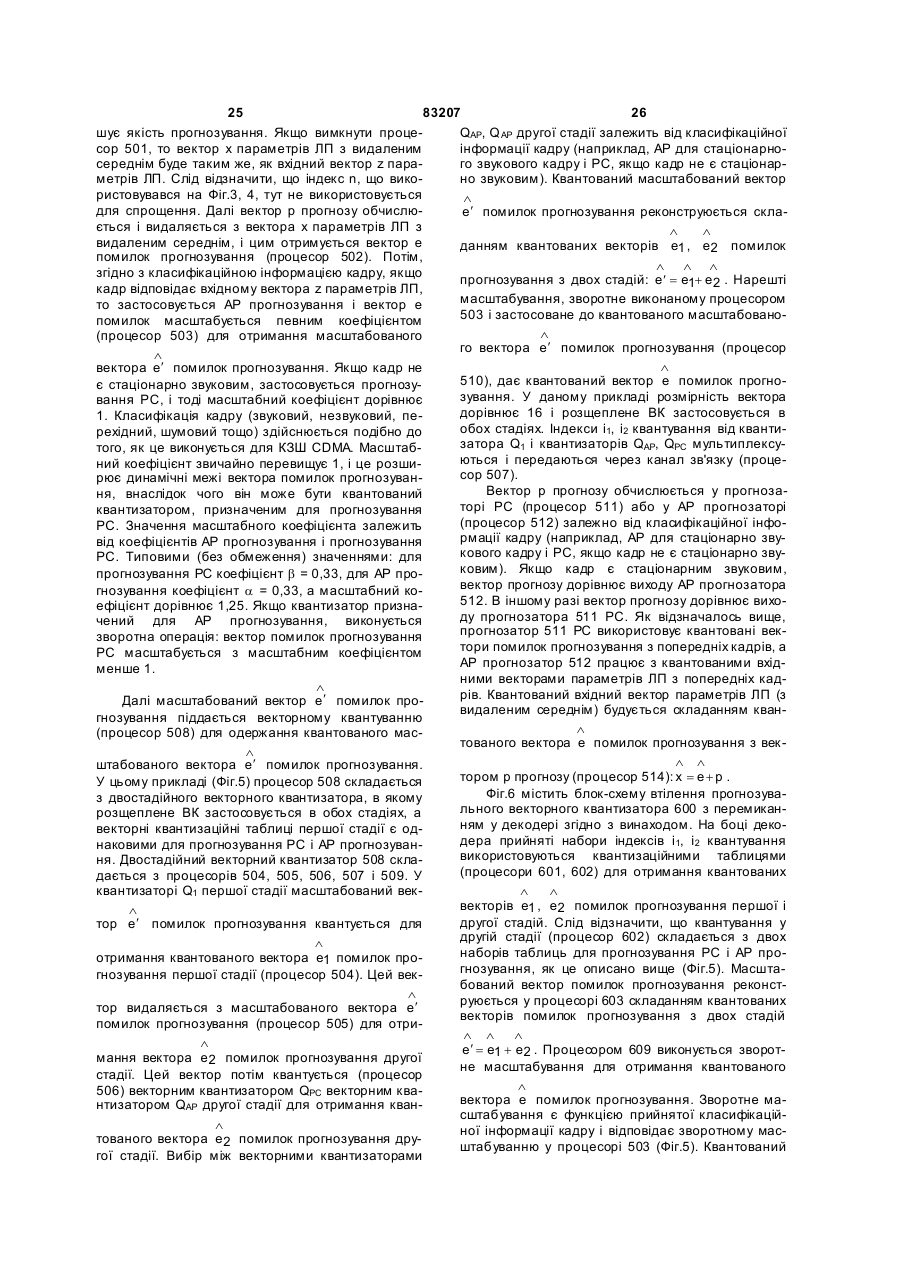
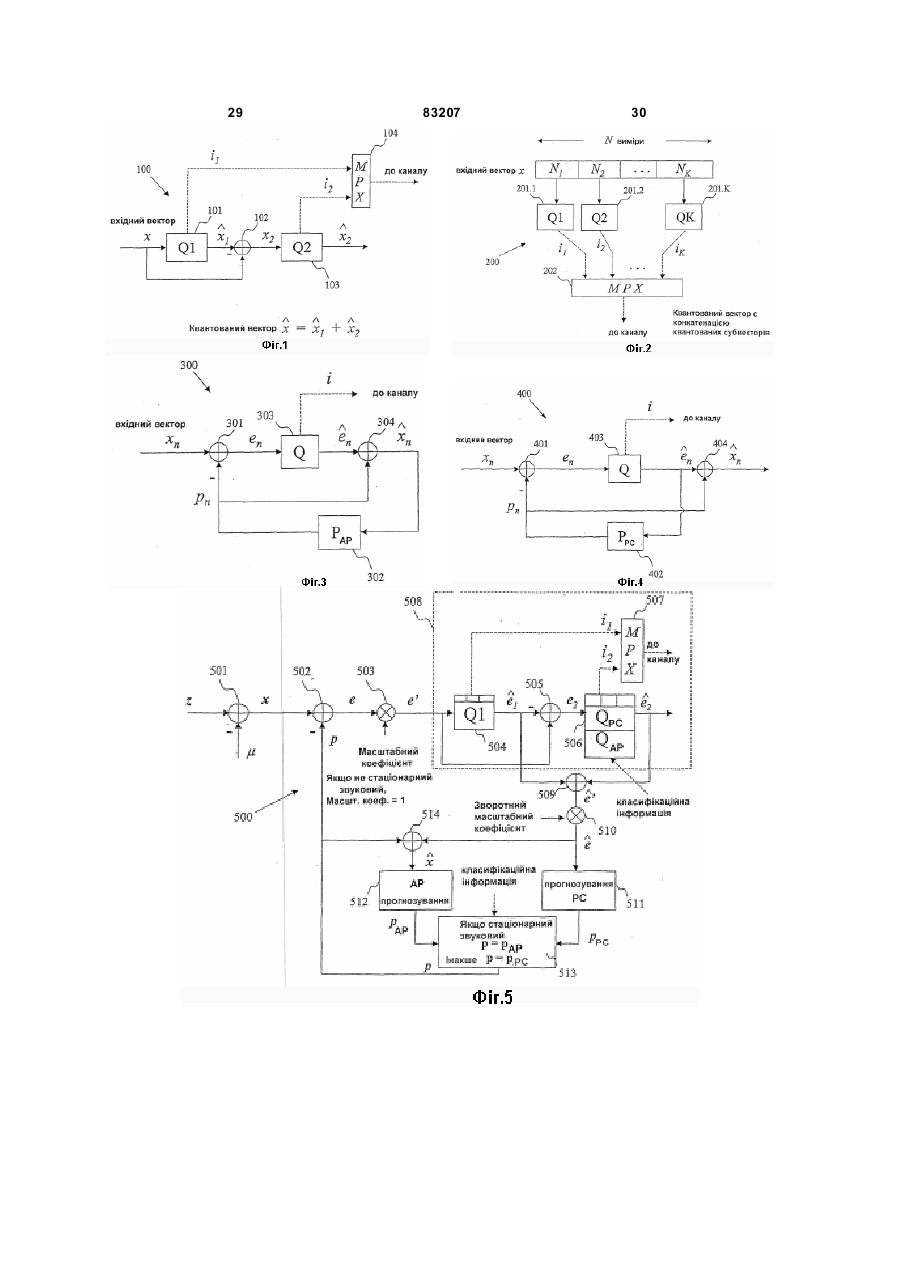
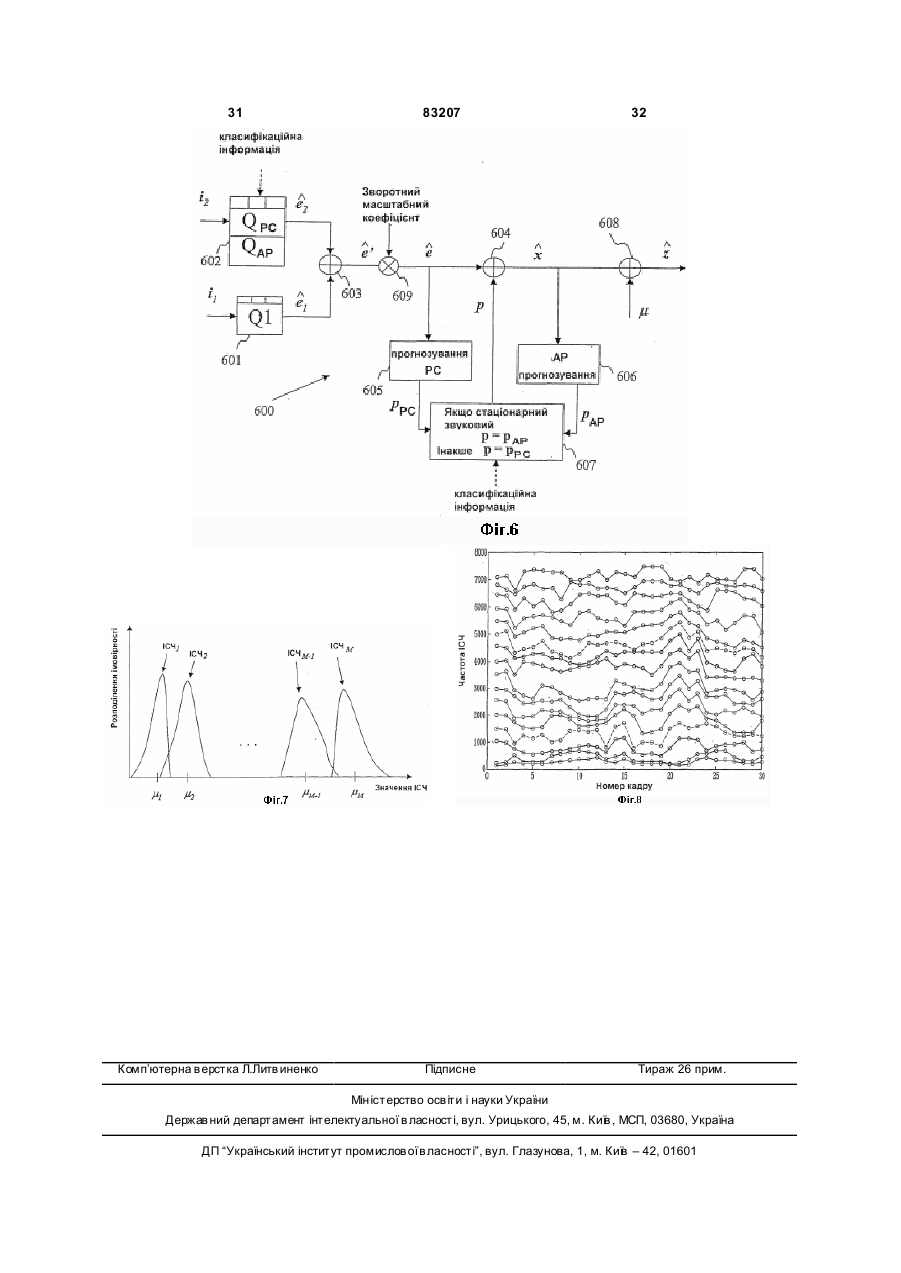
1. Спосіб квантування параметрів лінійного прогнозування у кодуванні звукового сигналу з змінною бітовою швидкістю, який включає: - прийом вхідного вектора параметрів лінійного прогнозування; - класифікацію кадру звукового сигналу, що відповідає вхідному вектору параметрів лінійного прогнозування; - обчислення вектора прогнозу; - видалення обчисленого вектора прогнозу з вхідного вектора параметрів лінійного прогнозування для отримання вектора помилок прогнозування; - масштабування вектора помилок прогнозування і квантування масштабованого вектора помилок прогнозування, причому 2 (19) 1 3 83207 4 - класифікація кадру звукового сигналу включає - складання (а) квантованого вектора помилок провизначення того, що цей кадр не є стаціонарно гнозування, отриманого складанням квантованих звуковим кадром; векторів помилок прогнозування першої і другої - обчислення вектора прогнозу включає обчисленстадій, і (b) обчисленого вектора прогнозу для ня вектора помилок прогнозування рухомого сереотримання квантованого вхідного вектора; і днього. - обробку квантованого вхідного вектора через 7. Спосіб за п. 5, який відрізняється тим, що маавторегресивне прогнозування. сштабний коефіцієнт перевищує 1. 15. Спосіб за п. 2, який відрізняється тим, що: 8. Спосіб за п. 1, який відрізняється тим, що ква- сукупність схем прогнозування включає прогнонтування вектора помилок прогнозування включає зування рухомого середнього і авторегресивне обробку вектора помилок прогнозування з застопрогнозування; суванням двостадійного процесу векторного кван- квантування вектора помилок прогнозування тування. включає: 9. Спосіб за п. 8, який відрізняється тим, що до- обробку вектора помилок прогнозування двостадатково включає застосування розщепленого векдійним векторним квантизатором, який має кодуторного квантування у двостадійному процесі веквальну книжку першої стадії, яка включає: торного квантування. першу гр уп у векторів, придатних для використання 10. Спосіб за п. 3, який відрізняється тим, що: у прогнозуванні рухомого середнього, розташова- квантування вектора помилок прогнозування ну на початку таблиці; включає обробку вектора помилок прогнозування з другу гр упу векторів, придатних для використання застосуванням двостадійного процесу векторного у прогнозуванні як рухомого середнього, так і у квантування, який включає першу і др угу стадії; і авторегресивному прогнозуванні, розташовану між - обробка вектора помилок прогнозування з застопершою і третьої групами векторів; суванням двостадійного процесу векторного квантретю груп у векторів, придатних для використання тування включає застосування вектора помилок у а вторегресивному прогнозуванні, розташовану у прогнозування до векторних квантувальних табкінці таблиці; лиць першої стадії, однакових як для авторегреси- обробка вектора помилок прогнозування щонайвного прогнозування, так і для прогнозування руменше одним квантизатором з використанням вихомого середнього. браної схеми прогнозування включає: 11. Спосіб за п. 8, який відрізняється тим, що - обробку вектора помилок прогнозування з викоквантування вектора помилок прогнозування ристанням першої і другої гр уп векторів таблиці, включає: якщо вибраною схемою прогнозування є прогнозу- квантування вектора помилок прогнозування у вання рухомого середнього; і першій стадії двостадійного процесу векторного - обробку вектора помилок прогнозування з викоквантування для формування квантованого вектористанням другої і третьої груп векторів таблиці, ра помилок прогнозування першої стадії; якщо вибраною схемою прогнозування є авторег- видалення квантованого вектора помилок проресивне прогнозування. гнозування першої стадії з вектора помилок про16. Спосіб за п. 15, який відрізняється тим, що гнозування; для уможливлення взаємодії з стандартом AMR- квантування вектора помилок прогнозування у WB за допомогою таблиці відображень створено другій стадії двостадійного процесу векторного відображення між положенням вектора першої квантування для формування квантованого вектостадії у таблиці і первісним положенням вектора ра помилок прогнозування другої стадії; і першої стадії у кодувальній книжці AMR-WB пер- формування квантованого вектора помилок прошої стадії. гнозування складанням квантованих векторів по17. Спосіб за п. 1, який відрізняється тим, що: милок прогнозування першої і другої стадій. - класифікація кадру звукового сигналу включає 12. Спосіб за п. 11, який відрізняється тим, що визначення того, щоцей кадр є стаціонарно або квантування вектора помилок прогнозування друнестаціонарно звуковим кадром; і гої стадії включає обробку вектора помилок про- у випадку стаціонарно звукового кадру: гнозування другої стадії квантизатором прогнозу- вибирання однієї з сукупності схем прогнозуванвання рухомого середнього або квантизатором ня відповідно до класифікації кадру звукового сигавторегресивного прогнозування залежно від кланалу включає вибирання авторегресивного просифікації кадру звукового сигналу. гнозування, 13. Спосіб за п. 8, який відрізняється тим, що - обчислення вектора прогнозу згідно з вибраною квантування вектора помилок прогнозування схемою прогнозування включає обчислення веквключає: тора помилок прогнозування з застосуванням ав- формування індексів квантування для двох статорегресивного прогнозування, дій двостадійного процесу векторного квантуван- вибирання однієї з сукупності схем прогнозування;і ня відповідно до класифікації кадру звукового сиг- передачу індексів квантування через канал зв'язналу включає вибирання масштабного коефіцієнку. та, що перевищує 1, і 14. Спосіб за п. 8, який відрізняється тим, що: - масштабування вектора помилок прогнозування - класифікація кадру звукового сигналу включає згідно з вибраною схемою масштабування вклювизначення того, що цей кадр звукового сигналу є чає масштабування вектора помилок прогнозуванстаціонарно звуковим кадром; і ня перед квантуванням з застосуванням масштаб- обчислення вектора прогнозу включає: ного коефіцієнта, що перевищує 1; 5 83207 6 - у випадку нестаціонарно звукового кадру: - додатково включає застосування класифікації - вибирання однієї з сукупності схем прогнозуванкадру звукового сигналу до квантувальної таблиці ня відповідно до класифікації кадру звукового сигдругої стадії для використання індексу квантуванналу включає вибирання прогнозування рухомого ня другої стадії у таблиці прогнозування рухомого середнього, середнього або у таблиці авторегресивного про- обчислення вектора прогнозу згідно з вибраною гнозування залежно від прийнятої класифікаційної схемою прогнозування включає обчислення векінформації кадру. тора помилок прогнозування з застосуванням про22. Спосіб за п. 20, який відрізняється тим, що гнозування рухомого середнього, відновлення вектора помилок прогнозування - вибирання однієї з сукупності схем прогнозуванвключає складання вектора помилок прогнозування відповідно до класифікації кадру звукового сигня першої стадії з вектором помилок прогнозуванналу включає вибирання масштабного коефіцієння другої стадії для формування відновленого векта, що дорівнює 1, і тора помилок прогнозування. - масштабування вектора помилок прогнозування 23. Спосіб за п. 22, який відрізняється тим, що згідно з вибраною схемою масштабування вклюдодатково включає виконання над відновленим чає масштабування вектора помилок прогнозуванвектором прогнозу операції зворотного масштабуня перед квантуванням з застосуванням масштабвання як функції прийнятої класифікаційної інфорного коефіцієнта, що дорівнює 1. мації кадру. 18. Спосіб деквантування параметрів лінійного 24. Спосіб за п. 18, який відрізняється тим, що прогнозування у декодуванні звукового сигналу з формування вектора параметрів лінійного прогнозмінною бітовою швидкістю, який включає: зування включає складання відновленого вектора - прийом щонайменше одного індексу квантуванпомилок прогнозування з реконструйованим векня; тором прогнозу для отримання вектора параметрів - прийом інформації про класифікацію кадру звулінійного прогнозування. кового сигналу відповідно до зазначеного щонай25. Спосіб за п. 24, який відрізняється тим, що менше одного індексу квантування; додатково включає складання вектора середніх - відновлення вектора помилок прогнозування запомилок прогнозування з відновленим вектором стосуванням цього щонайменше одного індексу помилок прогнозування і з реконструйованим векквантування до щонайменше однієї квантувальної тором прогнозу для отримання вектора параметрів таблиці; лінійного прогнозування. - реконструювання вектора прогнозу; і 26. Спосіб за п. 18, який відрізняється тим, що: - формування вектора параметрів лінійного про- сукупність схем прогнозування включає прогногнозування згідно з відновленим вектором помилок зування рухомого середнього і авторегресивне прогнозування і реконструйованим вектором пропрогнозування; і гнозу; - реконструювання вектора прогнозу включає обпричому реконструювання вектора прогнозу вклюробку відновленого вектора помилок прогнозуванчає обробку відновленого вектора помилок проня з застосуванням прогнозування рухомого серегнозування згідно з однією з сукупності схем проднього або обробку отриманого вектора гнозування залежно від інформації про параметрів з застосуванням авторегресивного класифікацію кадру. прогнозування залежно від класифікаційної інфо19. Спосіб за п. 18, який відрізняється тим, що рмації кадру. відновлення вектора помилок прогнозування 27. Спосіб за п. 26, який відрізняється тим, що включає застосування щонайменше одного індекреконструювання вектора прогнозу включає: су квантування до щонайменше однієї квантува- обробку отриманого вектора параметрів з застольної таблиці з використанням зазначеної однієї суванням авторегресивного прогнозування, коли схеми прогнозування. класифікаційна інформація кадру вказує, що кадр 20. Спосіб за п. 18, який відрізняється тим, що: звукового сигналу є стаціонарно звуковим; і - прийом щонайменше одного індексу квантування - обробку отриманого вектора параметрів з застовключає прийом індексу квантування першої стадії суванням прогнозування рухомого середнього, і індексу квантування другої стадії; і коли класифікаційна інформація кадру вказує, що - застосування щонайменше одного індексу кванкадр звукового сигналу не є стаціонарно звуковим. тування до щонайменше однієї квантувальної таб28. Пристрій для квантування параметрів лінійного лиці включає застосування індексу квантування прогнозування у кодуванні звукового сигналу з першої стадії до квантувальної таблиці першої змінною бітовою швидкістю, який включає: стадії для отримання вектора помилок прогнозу- засіб прийому вхідного вектора параметрів лінійвання першої стадії і застосування індексу квантуного прогнозування; вання другої стадії до квантувальної таблиці дру- засіб класифікації кадру звукового сигналу, що гої стадії для отримання вектора помилок відповідає вхідному вектору параметрів лінійного прогнозування другої стадії. прогнозування; 21. Спосіб за п. 20, який відрізняється тим, що: - засіб обчислення вектора прогнозу; - сукупність схем прогнозування включає прогно- засіб видалення обчисленого вектора прогнозу з зування рухомого середнього і авторегресивне вхідного вектора параметрів лінійного прогнозупрогнозування; вання для отримання вектора помилок прогнозу- квантувальна таблиця другої стадії включає табвання; лицю прогнозування рухомого середнього і табли- засіб масштабування вектора помилок прогнозуцю авторегресивного прогнозування; і вання; і 7 83207 8 - засіб квантування масштабованого вектора по34. Пристрій за п. 29, який відрізняється тим, що, милок прогнозування; коли класифікатор визначає, що кадр звукового причому сигналу не є стаціонарно голосовим кадром, обчи- засіб обчислення вектора прогнозу включає засіб слювач вектора прогнозу включає прогнозатор вибирання однієї схеми з сукупності схем прогнорухомого середнього для застосування прогнозузування відповідно до класифікації кадру звукововання рухомого середнього до вектора помилок го сигналу і засіб обчислення вектора прогнозу прогнозування. згідно з вибраною схемою; і 35. Пристрій за п. 33, який відрізняється тим, що - засіб масштабування вектора помилок прогнозувузол масштабування включає вузол множення вання включає засіб вибирання щонайменше однідля застосування до вектора помилок прогнозуєї схеми з сукупності схем масштабування відповівання масштабного коефіцієнта, більшого за 1. дно до вибраної схеми прогнозування і засіб 36. Пристрій за п. 29, який відрізняється тим, що масштабування вектора помилок прогнозування квантизатор включає двостадійний векторний квазгідно з вибраною схемою прогнозування. нти затор. 29. Пристрій для квантування параметрів лінійного 37. Пристрій за п. 36, який відрізняється тим, що прогнозування у кодуванні звукового сигналу з двостадійний векторний квантизатор включає дві змінною бітовою швидкістю, який включає: стадії, де застосовується розщеплене векторне - вхід для прийому вхідного вектора параметрів квантування. лінійного прогнозування; 38. Пристрій за п. 31, який відрізняється тим, що - класифікатор кадру звукового сигналу відповідно - квантизатор включає двостадійний векторний до вхідного вектора параметрів лінійного прогноквантизатор, який має першу і другу стадії; і зування; - двостадійний векторний квантизатор включає - обчислювач вектора прогнозу; квантувальні таблиці першої стадії, які є ідентич- вузол віднімання для видалення обчисленого ними як для прогнозування рухомого середнього, вектора прогнозу з вхідного вектора параметрів так і для авторегресивного прогнозування. лінійного прогнозування для отримання вектора 39. Пристрій за п. 36, який відрізняється тим, що помилок прогнозування; двостадійний векторний квантизатор включає: - вузол масштабування вектора помилок прогнозу- векторний квантизатор першої стадії, який привання; і ймає вектор помилок прогнозування для кванту- квантизатор масштабованого вектора помилок вання зазначеного вектора помилок прогнозування прогнозування; і формування квантованого вектора помилок пропричому гнозування першої стадії; - обчислювач вектора прогнозу включає селектор - вузол віднімання для видалення квантованого для вибирання однієї схеми з сукупності схем провектора помилок прогнозування першої стадії з гнозування відповідно до класифікації кадру звувектора помилок прогнозування для отримання кового сигналу і для обчислення вектора прогнозу вектора помилок прогнозування другої стадії; згідно з вибраною схемою; і - векторний квантизатор другої стадії, який при- вузол масштабування включає селектор для виймає вектор помилок прогнозування другої стадії бирання щонайменше однієї схеми з сукупності для квантування зазначеного вектора помилок схем масштабування відповідно до вибраної схепрогнозування другої стадії і формування квантоми прогнозування і для масштабування вектора ваного вектора помилок прогнозування другої стапомилок згідно з вибраною схемою прогнозування. дії; і 30. Пристрій за п. 29, який відрізняється тим, що - суматор для отримання квантованого вектора квантизатор отримує вектор помилок прогнозуванпомилок прогнозування складанням квантованих ня для обробки зазначеного вектора згідно з вибвекторів помилок прогнозування першої і другої раною схемою прогнозування. стадій. 31. Пристрій за п. 29, який відрізняється тим, що 40. Пристрій за п. 39, який відрізняється тим, що сукупність схем прогнозування включає прогнозувекторний квантизатор другої стадії включає: вання рухомого середнього і авторегресивне про- векторний квантизатор другої стадії р ухомого гнозування. середнього для квантування вектора помилок про32. Пристрій за п. 29, який відрізняється тим, що гнозування другої стадії з застосуванням прогнододатково включає: зування рухомого середнього; і - засіб формування вектора середніх параметрів - векторний авторегресивний квантизатор другої лінійного прогнозування; і стадії для квантування вектора помилок прогнозу- вузол віднімання для видалення вектора середвання другої стадії з застосуванням авторегресивніх параметрів лінійного прогнозування з вхідного ного прогнозування. вектора параметрів лінійного прогнозування і 41. Пристрій за п. 36, який відрізняється тим, що отримання цим вектора параметрів лінійного продвостадійний векторний квантизатор включає: гнозування з видаленими середніми. - векторний квантизатор першої стадії для форму33. Пристрій за п. 29, який відрізняється тим, що, вання індексу квантування першої стадії; коли класифікатор визначає, що кадр звукового - векторний квантизатор другої стадії для формусигналу є стаціонарно голосовим кадром, обчисвання індексу квантування другої стадії; і лювач вектора прогнозу включає авторегресивний - передавач для передачі індексів квантування прогнозатор для застосування авторегресивного першої і другої стадій через канал зв'язку. прогнозування до вектора помилок прогнозування. 42. Пристрій за п. 39, який відрізняється тим, що, якщо класифікатор визначає, що цей кадр звуково 9 83207 10 го сигналу є стаціонарно звуковим кадром, обчис- засіб прийому інформації про класифікацію кадру лювач вектора прогнозу включає: звукового сигналу відповідно до зазначеного що- суматор для складання (а) квантованого вектора найменше одного індексу квантування; помилок прогнозування, отриманого складанням - засіб відновлення вектора помилок прогнозуванквантованих векторів помилок прогнозування ня застосуванням цього щонайменше одного індепершої і другої стадій, з (b) обчисленим вектором ксу квантування до щонайменше однієї квантувапрогнозу для отримання квантованого вхідного льної таблиці; вектора; і - засіб реконструювання вектора прогнозу; і - авторегресивний прогнозатор для обробки кван- засіб формування вектора параметрів лінійного тованого вхідного вектора. прогнозування згідно з відновленим вектором по43. Пристрій за п. 30, який відрізняється тим, що: милок прогнозування і реконструйованим векто- сукупність схем прогнозування включає прогнором прогнозу; зування рухомого середнього і авторегресивне причому засіб реконструювання вектора прогнозу прогнозування; включає засіб обробки відновленого вектора по- квантизатор включає: милок прогнозування згідно з схемою з сукупності - двостадійний векторний квантизатор, який має схем прогнозування залежно від інформації про кодувальну книжку першої стадії, яка включає: класифікацію кадру. першу гр уп у векторів, придатних для використання 47. Пристрій для деквантування параметрів лінійу прогнозуванні рухомого середнього, розташованого прогнозування у декодуванні звукового сигну на початку таблиці; налу з змінною бітовою швидкістю, який включає: другу гр упу векторів, придатних для використання - засіб прийому щонайменше одного індексу квану прогнозуванні як рухомого середнього, так і у тування; авторегресивному прогнозуванні, розташовану між - засіб прийому інформації про класифікацію кадру першою і третьою групами векторів; звукового сигналу відповідно до зазначеного щотретю груп у векторів, придатних для використання найменше одного індексу квантування; у а вторегресивному прогнозуванні, розташовану у - щонайменше одну квантувальну таблицю для кінці таблиці; відновлення вектора помилок прогнозування через - засіб обробки вектора помилок прогнозування застосування до неї щонайменше одного індексу включає: квантування; - засіб обробки вектора помилок прогнозування з - вузол реконструювання вектора прогнозу; використанням першої і другої груп векторів таб- генератор вектора параметрів лінійного прогнолиці, якщо вибраною схемою прогнозування є прозування відповідно до відновленого вектора помигнозування рухомого середнього; і лок прогнозування і реконструйованого вектора - засіб обробки вектора помилок прогнозування з прогнозу, використанням другої і третьої гр уп векторів табпричому вузол реконструювання вектора прогнозу лиці, якщо вибраною схемою прогнозування є аввключає щонайменше один прогнозатор, який торегресивне прогнозування. приймає відновлений вектор помилок прогнозу44. Пристрій за п. 43, який відрізняється тим, що вання для обробки цього відновленого вектора для уможливлення взаємодії з стандартом AMRпомилок прогнозування згідно з схемою з сукупноWB додатково включає таблицю відображень, яка сті схем прогнозування залежно від інформації про встановлює відображення між положенням вектокласифікацію кадру. ра першої стадії у цій таблиці і первісним поло48. Пристрій за п. 47, який відрізняється тим, що женням між положенням вектора першої стадії у зазначена щонайменше одна квантувальна табцій таблиці і первісним положенням вектора перлиця включає квантувальну таблицю, що викорисшої стадії у кодувальній книжці AMR-WB першої товує зазначену одну схему прогнозування і пристадії. ймає на її входах зазначений щонайменше один 45. Пристрій за п. 31, який відрізняється тим, що: індекс і класифікаційну інформацію. - обчислювач вектора прогнозу включає авторег49. Пристрій за п. 47, який відрізняється тим, що: ресивний прогнозатор для застосування авторег- засіб прийому індексу квантування має два входи ресивного прогнозування до вектора помилок продля прийому індексу квантування першої стадії і гнозування і прогнозатор рухомого середнього для індексу квантування другої стадії; і застосування прогнозування рухомого середнього - зазначена щонайменше одна квантувальна табдо вектора помилок прогнозування; і лиця включає квантувальну таблицю першої ста- авторегресивний прогнозатор і прогнозатор рудії, яка приймає індекс квантування першої стадії хомого середнього мають відповідні пам'яті, які для визначення вектора помилок прогнозування оновлюються з кожним кадром звукового сигналу, першої стадії, і квантувальну таблицю другої стаза припущення, що прогнозування рухомого середії, яка приймає індекс квантування другої стадії днього і авторегресивне прогнозування можуть для визначення вектора помилок прогнозування бути використані у наступному кадрі. другої стадії. 46. Пристрій для деквантування параметрів ліній50. Пристрій за п. 49, який відрізняється тим, що: ного прогнозування у декодуванні звукового сиг- сукупність схем прогнозування включає прогноналу з змінною бітовою швидкістю, який включає: зування рухомого середнього і авторегресивне - засіб прийому щонайменше одного індексу кванпрогнозування; тування; - квантувальна таблиця другої стадії включає таблицю прогнозування рухомого середнього і таблицю авторегресивного прогнозування; і 11 83207 12 - додатково включає засіб застосування класифі- вузол реконструювання вектора прогнозу вклюкації кадру звукового сигналу до квантувальної чає прогнозатор рухомого середнього і авторегретаблиці другої стадії для використання індексу сивний прогнозатор для обробки відновленого квантування другої стадії у таблиці прогнозування вектора помилок прогнозування з застосуванням рухомого середнього або у таблиці авторегресивпрогнозування рухомого середнього або обробки ного прогнозування залежно від прийнятої класиотриманого вектора параметрів з застосуванням фікаційної інформації кадру. авторегресивного прогнозування залежно від кла51. Пристрій за п. 49, який відрізняється тим, що сифікаційної інформації кадру. додатково включає суматор для складання векто56. Пристрій за п. 55, який відрізняється тим, що ра помилок прогнозування першої стадії з вектовузол реконструювання вектора прогнозу включає: ром помилок прогнозування другої стадії для - засіб обробки отриманого вектора параметрів з отримання відновленого вектора помилок прогнозастосуванням авторегресивного прогнозування, зування. коли класифікаційна інформація кадру вказує, що 52. Пристрій за п. 51, який відрізняється тим, що кадр звукового сигналу є стаціонарно звуковим; і додатково включає пристрій виконання над відно- засіб обробки отриманого вектора параметрів з вленим вектором прогнозу операції зворотного застосуванням прогнозування рухомого середньомасштабування як функції прийнятої класифікаго, коли класифікаційна інформація кадру вказує, ційної інформації кадру. що кадр звукового сигналу не є стаціонарно звуко53. Пристрій за п. 47, який відрізняється тим, що вим. генератор вектора параметрів лінійного прогнозу57. Пристрій за п. 55, який відрізняється тим, що: вання включає суматор для складання відновле- зазначений щонайменше один прогнозатор ного вектора помилок прогнозування з реконструвключає авторегресивний прогнозатор для застойованим вектором прогнозу для отримання сування авторегресивного прогнозування до веквектора параметрів лінійного прогнозування. тора помилок прогнозування і прогнозатор рухомо54. Пристрій за п. 53, який відрізняється тим, що го середнього для застосування прогнозування додатково включає засіб складання вектора серерухомого середнього до вектора помилок прогнодніх помилок прогнозування з відновленим вектозування; і ром помилок прогнозування і з реконструйованим - авторегресивний прогнозатор і прогнозатор рувектором прогнозу для отримання вектора парахомого середнього мають відповідні пам'яті, які метрів лінійного прогнозування. оновлюються з кожним кадром звукового сигналу, 55. Пристрій за п. 47, який відрізняється тим, що: за припущення, що прогнозування рухомого сере- сукупність схем прогнозування включає прогноднього і авторегресивне прогнозування можуть зування рухомого середнього і авторегресивне бути використані у наступному кадрі. прогнозування; і Винахід стосується удосконаленої процедури цифрового кодування сигналу, зокрема, але не лише, мовного сигналу з точки зору передачі і синтезування цього аудіо сигналу. Зокрема, винахід стосується способу і пристрою для векторного квантування параметрів лінійного прогнозування у кодуванні, базованому на лінійному прогнозуванні змінної бітової швидкості. Цифрові мовні системи зв'язку, наприклад, безпровідні, використовують кодери мови для збільшення інформаційної ємності системи із збереженням високої якості голосу. Кодер мови перетворює мовний сигнал у цифровий потік біт, який передається у каналі зв'язку або зберігається у середовищі зберігання. Мовний сигнал цифрують, тобто, відбирають зразки і квантують, звичайно з 16 бітами на зразок. Функцією кодера мови є репрезентування цих цифрових зразків меншою кількістю біт з забезпеченням суб'єктивно високої якості голосу. Декодер мови або синтезатор обробляє переданий або збережений потік біт, перетворюючи його назад у звуковий сигнал. Методи цифрового кодування, базовані на аналізі лінійного прогнозу, були е фективними при кодуванні мови з низькою бітовою швидкістю. Зокрема, лінійне прогнозування з кодовим збудженням (ЛПКЗ) є одним з найвідоміших методів досяг нення прийнятного компромісу між суб'єктивною якістю і бітовою швидкістю. Цей спосіб кодування є основою декількох стандартів кодування мови у системах як провідного, так і безпровідного зв'язку. При кодуванні ЛПКЗ мовний сигнал у вигляді зразків обробляється як послідовність блоків по N зразків, які звичайно називають кадрами (N - заздалегідь визначене значення, яке звичайно відповідає 10-13мс). Фільтр A(z) лінійного прогнозування (ЛП) обчислюється, кодується і передається у кожному кадрі. Обчислення фільтру A(z) звичайно потребує "заглядання уперед", яке складається з 5-15-мілісекундного мовного сегмента з наступного кадру. N-зразковий кадр розділяють на менші блоки, які називають субкадрами. Звичайно кількість субкадрів - 3 або 4, а тривалість - 4-10мс. У кожному кадрі сигнал збудження одержують з двох компонентів - минулого збудження і оновленого збудження фіксованої кодувальної книжки. Компонент, утворений з минулої кодувальної книжки, часто називають адаптивною кодувальною книжкою або тоновим збудженням. Параметри сигналу збудження кодуються і передаються до декодера, де реконструйований сигнал збудження використовується як вхід фільтру синтезу ЛП. Фільтр синтезу ЛП визначається співвідношенням: 13 83207 14 чним кодом лінійного прогнозування спряженої структури)", Geneva, March 1996]. Схожою репрезентацією є імітантні спектральні частоти (ІСЧ), які використовуються у стандарті де аі - коефіцієнти ЛП, а М - порядок аналізу кодування AMR-WB [див. документ G.722.2 ITU-T ЛП. Фільтр синтезу ЛП моделює спектральну обвівище]. Використовуються і інші репрезентації. Без дну мовного сигналу. У декодері мовний сигнал обмеження спільності у подальшому буде розгляреконструюється фільтруванням декодованого датись репрезентація ІСЧ. збудження фільтром синтезу ЛП. Отримані таким чином параметри ЛП (ЧЛС, Набір коефіцієнтів ЛП аі обчислюють таким чином, ІСЧ то що) квантують скалярним (СК) або векторщоб мінімізувати помилку прогнозування: ним (ВК) квантуванням. У скалярному квантуванні i параметри ЛП квантують індивідуально 3-4 бітами (1) e(n) = s(n) - s(n) на параметр. У векторному квантуванні параметри i ЛП груп ують у вектор і квантують як ціле. Кодуваде s(n) - вхідний сигнал у момент n, a s(n) льну книжку або таблицю з сукупністю квантованих прогнозований сигнал, базований на останніх М векторів зберігають. Квантизатор проглядає кодузразках: вальну книжку, шукаючи вхід, найближчий до вхідного вектора згідно з певною метрикою. Індекс вибраного квантованого вектора надсилається до декодера. Векторне квантування є ефективнішим за скалярне, але за рахунок ускладнення і додатОтже, помилка прогнозування визначається кових вимог до пам'яті. як: Структурований вектор звичайно використовують для зниження складності і вимог до зберігання. У розщепленому ВК вектор параметрів ЛП розщеплюють щонайменше на два субвектори, які квантують окремо. У багатостадійному ВК квантоВ області z-перетворення це відповідає ваний вектор є сумою входів декількох кодувальE(z) = S(z)A(z) них книжок. Розщеплене і багатостадійне ВК зниде A(z) - фільтр ЛП порядку М, визначний жують потребу у пам'яті і складність, але співвідношенням: забезпечують якісне квантування. Багатообіцяючим є комбінування розщепленого і багатостадійного ВК для подальшого зниження складності і потреби у пам'яті. Згідно з G.729 ITU-T [див. вище] Звичайно коефіцієнти а і ЛП обчислюють мінівектор параметрів ЛП квантують у дві стадії, примізацією середньквадратичної помилки прогнозучому вектор другої стадії розщеплюють на два вання на блоці з L зразків. Звичайно L > N (звисубвектори. чайно L відповідає 20-30мс). У решті обчислення Параметри ЛП показують сильну кореляцію цих коефіцієнтів є добре відомим фахівцям. Приміж послідовними кадрами і цю обставину звичайклади такого обчислення можна знайти у [ITU-T но використовують, виконуючи прогнозувальне Recommendation G.722.2 "Wideband coding of квантування для підвищення ефективності. У кваspeech at around 16xbit/s using adaptive multi-rate нтуванні прогнозування вектор прогнозованих паwideband (AMR-WB) (Широкосмугове кодування раметрів ЛП обчислюють, базуючись на інформамови при приблизно 16кбіт/с з використанням адації з попередніх кадрів. Тоді прогнозований вектор птивної багатошвидкісної широкої смуги (AMRвидаляють з вхідного вектора, і помилка квантуWB))", Geneva, 2002]. вання стає квантованим вектором. Звичайно викоКоефіцієнти аі ЛП елемент коду не можна безристовують два типи прогнозування: авторегресипосередньо квантувати для передачі до декодера. вне (АР) кодування і прогнозування рухомого Причиною цього є те, що невеликі помилки квансереднього (PC). В АР кодуванні прогнозований тування на коефіцієнтах ЛП можуть викликати вевектор обчислюють як комбінацію квантованих ликі спектральні помилки у перехідній функції фівекторів з попередніх кадрів. У прогнозування PC льтру ЛП і навіть створити нестабільність фільтру. прогнозований вектор обчислюють як комбінацію Тому перед квантуванням над коефіцієнтами а і ЛП векторів помилок прогнозування з попередніх кадвиконують перетворення, яке дає те, що називарів. АР прогноз дає кращі результати, однак є неють репрезентацією цих коефіцієнтів. Після пристійким до втрат кадрів, які трапляються у систейому квантованих перетворених коефіцієнтів ЛП аі мах безпровідного і пакетного зв'язку. При втраті декодер може застосувати до них зворотне перекадрів помилка розповсюджується на подальші творення для отримання квантованих коефіцієнтів кадри, оскільки прогнозування базується на попеЛП. Однією з широко відомих репрезентацій для редніх спотворених кадрах. коефіцієнтів а і ЛП є частоти лінійчатого спектра У деяких системах зв'язку, наприклад, у без(ЧЛС), відомі також як лінійчасто-спектральні пари провідних системах з множинним доступом і кодо(ЛСП). Обчислення ЧЛС можна знайти у [ITU-T вим розділенням каналів (CDMA) застосування Recommendation G.729 "Wideband coding at around контрольованого джерелом кодування з змінною 8kbit/s using conjudate-structure algebraic-codeшвидкістю мови підвищує ємність системи. При excited linear prediction (Широкосмугове кодування контрольованому джерелом кодуванні КЗШ кодер при 8кбіт/с з використанням збудженого алгебраїможе працювати з декількома бітовими швидко 15 83207 16 стями, і застосований тут модуль вибору швидкокоефіцієнти ЛП формуються повільно і тому застості визначає бітову швидкість для кодування кожсування АР прогнозування у цьому випадку матиного мовного кадру, базуючись на природі цього ме менший вплив на розповсюдження помилки кадру (наприклад, він може бути, звуковим, незвупри втраті кадрів. Це підтверджується тим, що при ковим, перехідним, шумовим тощо). Метою є досявтраті кадрів у більшості декодерів застосовується гнення найкращої якості мови при даній середній процедура маскування, яка, по суті, екстраполює бітовій швидкості (СБШ). Кодер може також пракоефіцієнти ЛП останнього кадру. Якщо втрачений цювати у різних режимах через застосування мокадр був стаціонарно звуковим, ця екстраполяція дуля вибору швидкості для одержання СБШ для дає значення, дуже близькі до фактично передарізних режимів, коли ефективність кодера поліпних, але не прийнятих, параметрів ЛП. У цьому шується з зростанням СБШ. Це дозволяє кодеру випадку АР прогнозування у процедурі квантуванзнаходити компроміс між якістю мови і ємністю ня коефіцієнтів ЛП не створює шкідливого розпосистеми. У системах CDMA, наприклад, CDMA-1 і всюдження помилки квантування. CDMA2000 звичайно використовуються 4 бітові Задачею винаходу є створення способу кваншвидкості: повна (ПШ), напівшвидкість (НШ), 1/4 тування параметрів ЛП у кодування звукового сигповної швидкості (ЧШ) і 1/8 повної швидкості (ВШ). налу з змінною бітовою швидкістю, який включає У цих системах підтримується два набори швидкоприйом вхідного вектора параметрів ЛП, класифістей: Набір Швидкостей І і Набір Швидкостей II. З кацію кадру звукового сигналу відповідно до вхідНабором Швидкостей II кодер з змінною швидкістю ного вектора параметрів ЛП, обчислення вектора має механізм вибору швидкостей і працює з кодопрогнозу, видалення обчисленого вектора прогнованими джерелом бітовими швидкостями (13,3 зу з вхідного вектора параметрів ЛП для отриман(ПШ), 6,2 (НШ), 2,7 (ЧШ) і 1,0 (ВШ)кбіт/с, які відпоня вектора помилок прогнозування, масштабуванвідають повним бітовим швидкостям 14,4, 7,2, 3,6 і ня вектора помилок прогнозування і квантування 1,8кбіт/с (з бітами, доданими для виявлення помимасштабованого вектора помилок прогнозування. лок). Обчислення вектора прогнозу включає обрання Широкосмуговий кодек, відомий як адаптивний однієї схеми з сукупності схем прогнозування відширокосмуговий кодек мови (AMR-WB) був вибраповідно до класифікації кадру звукового сигналу і ний Сектором стандартизаці Зв'язку Міжнародної обчислення вектора прогнозу згідно з вибраною Спілки зв'язку (ITU-T) і Проектом Партнерства схемою. Масштабування вектора помилок прогноТретього Покоління (3GPP) для безпровідних сисзування включає обрання щонайменше однієї тем третього покоління GSM і W-CDMA (Широкосхеми з сукупності схем масштабування відповідно смуговий CDMA). Кодек AMR-WB використовує 9 до вибраної схеми прогнозування і масштабування бітових швидкостей від 6,6 до 23,85кбіт/с. Викоривектора помилок згідно з вибраною схемою простання базованого на AMR-WB контрольованого гнозування. джерелом кодека AMR у системі CDMA2000 доОб'єктом винаходу є також пристрій для кванзволяє реалізувати взаємодію між CDMA2000 і тування параметрів ЛП у кодуванні звукового сигіншими системами, які використовують кодек AMRналу з змінною бітовою швидкістю, який включає WB. У AMR-WB бітова швидкість 12,65кбіт/с є найзасіб прийому вхідного вектора параметрів ЛП, ближчою до швидкості 13,3кбіт/с (ПШ для Набору засіб класифікації кадру звукового сигналу відпоШвидкостей II CDMA2000). Швидкість 12,65кбіт/с відно до вхідного вектора параметрів ЛП, засіб може бути спільною швидкістю для широкосмугообчислення вектора прогнозу, засіб видалення вого кодека AMR у CDMA2000 і для кодека AMRобчисленого вектора прогнозу з вхідного вектора WB, яка забезпечить взаємодію без перекодуванпараметрів ЛП для отримання вектора помилок ня, що знижує якість мови. Для підвищення ефекпрогнозування, засіб масштабування вектора потивності має бути додана НШ Набору Швидкостей милок прогнозування і засіб квантування масштаII (6,2кбіт/с). Одержаний кодек може працювати у бованого вектора помилок прогнозування. Засіб декількох режимах, узгоджених з CDMA2000, і у обчислення вектора прогнозу включає засіб обрежимі, що забезпечує взаємодію з системами з рання однієї схеми з сукупності схем прогнозуванкодеком AMR-WB. ня відповідно до класифікації кадру звукового сигКодування з напівшвидкістю (НШ) звичайно налу і засіб обчислення вектора прогнозу згідно з обирають для кадрів з вхідним стаціонарно моввибраною схемою. Засіб масштабування вектора ним сигналом. Економія біт порівняно з ПШ досяпомилок прогнозування включає засіб обрання гається менш частим оновленням параметрів кощонайменше однієї схеми з сукупності схем масшдування і використанням меншої кількості біт для табування відповідно до вибраної схеми прогнозукодування деяких з цих параметрів. Згідно з одним вання і засіб масштабування вектора помилок згіз аспектів, у стаціонарно звукових сегментах інфодно з вибраною схемою прогнозування. рмація про тон кодується лише один раз у кадрі і Винахід стосується також способу деквантуменша кількість біт використовується для парамевання параметрів ЛП у декодування звукового трів фіксованої кодувальної книжки і коефіцієнтів сигналу із змінною бітовою швидкістю, який вклюлінійного прогнозування. чає прийом щонайменше одного індексу квантуОскільки для кодування коефіцієнтів ЛП звивання, прийом інформації про класифікацію кадру чайно застосовують ВК з прогнозуванням PC, у звукового сигналу відповідно до зазначеного щоцих коефіцієнтах з'являється надмірний шум кваннайменше одного індексу квантування, відновлентування. Прогнозування PC на відміну від АР проня вектора помилок прогнозування застосуванням гнозування використовують для підвищення стійцього щонайменше одного індексу квантування до кості до втрат кадрів: однак, у стаціонарних кадрах щонайменше однієї квантувальної таблиці, рекон 17 83207 18 струювання вектора прогнозу і формування вектоФіг.5 - блок-схема необмежуючого прикладу ра параметрів ЛП згідно з відновленим вектором прогнозувального векторного квантизатора з пепомилок прогнозування і реконструйованим векторемиканням у декодері, згідно з ілюстративним ром прогнозу. Реконструювання вектора прогнозу втіленням винаходу, включає обробку відновленого вектора помилок Фіг.6 - блок-схема необмежуючого прикладу прогнозування згідно з однією схемою з сукупності прогнозувального векторного квантизатора з песхем прогнозування залежно від інформації про ремиканням у декодері, згідно з ілюстративним класифікацію кадру. втіленням винаходу, Крім того, винахід стосується пристрою для Фіг.7 - необмежуючий ілюстративний приклад деквантування параметрів ЛП у декодуванні звурозподілення ІСЧ за частотою, де кожне розподікового сигналу з змінною бітовою швидкістю, який лення є функцією імовірності знайти ІСЧ у даному включає засіб прийому щонайменше одного індекположенні у векторі ІСЧ, і су квантування, засіб прийому інформації про клаФіг.8 - гра фік типового прикладу формування сифікації кадру звукового сигналу відповідно до параметрів ІСЧ на послідовних мовних кадрах. зазначеного щонайменше одного індексу квантуХоча втілення винаходу розглядаються на вання, засіб відновлення вектора помилок прогноприкладах мовного сигналу, слід брати до уваги, зування застосуванням цього щонайменше одного що винахід може бути застосований і для інших індексу квантування до щонайменше однієї квантипів звукових сигналів. тувальної таблиці, засіб реконструювання вектора Більшість сучасних кодувальних процедур бапрогнозу і засіб формування вектора параметрів зовані на аналізі ЛП, наприклад кодуванні ЛПКЗ. ЛП згідно з відновленим вектором помилок проПараметри ЛП обчислюються і квантизуються у гнозування і реконструйованим вектором прогнозу. кадрах тривалістю 10-30мс. У даному втіленні виЗасіб реконструювання вектора прогнозу включає користано 20-мілісекундні кадри і застосовано засіб обробки відновленого вектора помилок проаналіз ЛП порядку 16. Приклад обчислення парагнозування згідно з однією схемою з сукупності метрів ЛП у системі кодування мови можна знайти схем прогнозування залежно від інформації про у документі G.722.22 ITU-T [див. вище]. У цьому класифікацію кадру. прикладі у попередньо обробленому сигналі ствоЗгідно з останнім аспектом, винахід включає рюють вікно і обчислюють автокореляції мови з пристрій для деквантування параметрів ЛП у девікнами. Для обчислення коефіцієнтів а, ЛП (і = кодування звукового сигналу з змінною бітовою 1,...,М) з автокореляцій R(k) (k = 1,...,М) застосошвидкістю, який включає засіб прийому щонаймевують рекурсію Левінсона-Дурбіна (М - порядок нше одного індексу квантування, засіб прийому прогнозування). інформації про класифікації кадру звукового сигКоефіцієнти ЛП а1 не можна безпосередньо налу відповідно до зазначеного щонайменше одквантувати для передачі до декодера. Причиною ного індексу квантування, щонайменше одну кванцього є те, що невеликі помилки квантування на тувальну таблицю для відновлення вектора коефіцієнтах ЛП можуть викликати великі спектрапомилок прогнозування через зазначений щонайльні помилки у передаточній функції фільтру ЛП і менше один індекс квантування, вузол реконструнавіть створити нестабільність фільтру. Тому пеювання вектора прогнозу і генератор вектора паред квантуванням над коефіцієнтами а 1 виконують раметрів ЛП згідно з відновленим вектором перетворення, яке дає те, що називають репрезепомилок прогнозування реконструйованим вектонтацією цих коефіцієнтів. Після прийому квантоваром прогнозу. Вузол реконструювання вектора них перетворених коефіцієнтів а 1 декодер може прогнозу включає щонайменше один засіб прогнозастосувати до ни х зворотне перетворення для зування, який приймає відновлений вектор помиотримання квантованих коефіцієнтів ЛП. Однією з лок прогнозування для обробки цього відновленошироко відомих репрезентацій для коефіцієнтів а 1 го вектора помилок прогнозування згідно з однією ЛП є частоти лінійчатого спектра (ЧЛС), відомі схемою з сукупності схем прогнозування залежно також як лінійчасто-спектральні пари (ЛСП). Обчивід інформації про класифікацію кадру слення ЧЛС можна знайти у документі G.729 ITU-T Описані вище і інші об'єкти, переваги і особли[див. ви ще]. ЧЛС складаються з поліномів: вості винаходу де тально розглядаються у подальшому необмежуючому описі ілюстративних втілень винаходу, наданих як приклади, з посиланнями на креслення, в яких: Фіг.1 - блок-схема необмежуючого прикладу багатостадійного векторного квантизатора, Фіг.2 - блок-схема необмежуючого прикладу Для парних значень М кожний поліном має М/2 векторного квантизатора, в якому застосовується розщеплення вектора, спряжених коренів на вузловому колі (е±jwi). Отже, Фіг.3 - блок-схема необмежуючого прикладу поліноми можна записати як: прогнозувального векторного квантизатора, в якому застосовується авторегресивне (АР) прогнозування, Фіг.4 - блок-схема необмежуючого прикладу прогнозувального векторного квантизатора, в якому застосовується прогнозування рухомого середнього (PC), 19 83207 20 ний коефіцієнт ІСЧ займає обмежений інтервал на де qi - cos(wi), а wi - лінійні частоти спектра всіх можливих значеннях ІСЧ. Цим суттєво знижу(ЧЛС), що задовольняють умові упорядкування ється об'єм інформації, з яким має працювати ква0
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for stable vector prediction quantization of parameters of linear prediction in language coding at variable bit rate
Автори англійськоюYelinek Milan
Назва патенту російськоюСпособ и устройство устойчивого векторного прогнозного квантования параметров линейного прогнозирования в кодировании языка с переменной битовой скоростью
Автори російськоюЕлинек Милан
МПК / Мітки
МПК: G10L 19/00
Мітки: швидкістю, пристрій, спосіб, змінною, параметрів, кодуванні, векторного, стійкого, прогнозувального, лінійного, бітовою, квантування, прогнозування, мови
Код посилання
<a href="https://ua.patents.su/16-83207-sposib-i-pristrijj-stijjkogo-vektornogo-prognozuvalnogo-kvantuvannya-parametriv-linijjnogo-prognozuvannya-u-koduvanni-movi-z-zminnoyu-bitovoyu-shvidkistyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій стійкого векторного прогнозувального квантування параметрів лінійного прогнозування у кодуванні мови з змінною бітовою швидкістю</a>
Спосіб стиснення мовного сигналу шляхом кодування зі змінною швидкістю, схема та пристрій для стиснення акустичного сигналу
Номер патенту: 43311
Опубліковано: 17.12.2001
Автори: Мінг-Чанг Цай, Чонг Ю. Лі, Кетрін С. Лем, Клайн С. Гілхаузен, Уільям Р. Гарднер, Пол Є. Джейкобс
МПК: G10L 21/00, G10L 19/00
Мітки: сигналу, змінною, схема, шляхом, швидкістю, стиснення, мовного, кодування, акустичного, пристрій, спосіб
Формула / Реферат:
1. Способ сжатия речевого сигнала путем кодирования с переменной скоростью кадров оцифрованных выборок речевого сигнала, отличающийся тем, что включает операции определения уровня сигнала речевой активности для кадра оцифрованных выборок речевого сигнала, выбора для указанного кадра скорости кодирования из группы скоростей в зависимости от указанного определенного уровня сигнала речевой активности, кодирования указанного кадра в соответствии...
Спосіб передачі інформації по радіоканалу зі змінною швидкістю
Номер патенту: 56610
Опубліковано: 15.05.2003
Автор: Загорулько Олександр Миколайович
МПК: H04B 7/00
Мітки: передачі, швидкістю, радіоканалу, інформації, змінною, спосіб
Формула / Реферат:
Спосіб передачі інформації по радіоканалу зі змінною швидкістю в радіолініях космічних систем, обладнаних автономними системами навігації, який відрізняється тим, що сигнали від джерела інформації до передавального пристрою проходять через керований буферний запам’ятовуючий пристрій, зчитування інформації з якого здійснюється зі змінною, в залежності від довжини радіолінії, оптимальною з точки зору енергетичних характеристик сигналу на вході...
Спосіб передачі повідомлень за допомогою імпульсної відносної квадратурної балансової модуляції й квантування
Номер патенту: 81151
Опубліковано: 10.12.2007
Автор: Бронніков Вадим Миколайович
МПК: H04L 27/22, H04B 7/165
Мітки: імпульсної, квадратурної, квантування, балансової, відносної, передачі, повідомлень, спосіб, допомогою, модуляції
Формула / Реферат:
Спосіб передачі повідомлень за допомогою імпульсної відносної квадратурної балансової модуляції й квантування полягає в тому, що з переданого повідомлення одержують і запам'ятовують вибірки , , із кроком дискретизації
Спосіб квантування періодичних сигналів (варіанти) та пристрій для його здійснення (варіанти)
Номер патенту: 44862
Опубліковано: 15.03.2002
Автори: Левін Ілля Рувімович, Гриб Олег Герасимович, Левін Владислав Ілліч
МПК: H04N 3/00, G01R 13/00
Мітки: спосіб, варіанти, періодичних, здійснення, пристрій, сигналів, квантування
Формула / Реферат:
1. Спосіб квантування періодичних сигналів, який включає задання кількості точок квантування, вимірювання тривалості періоду у вигляді кількості імпульсів вимірювального генератора протягом тривалості періоду, безперервне ділення тривалості періоду на кількість точок квантування, починаючи з початку періоду, наступного після виміряного, шляхом послідовного віднімання з одержанням результату ділення у вигляді цілої частини та остачі та...
Пристрій для навчання правильної вимови слів при вивченні іноземної мови
Номер патенту: 61956
Опубліковано: 15.12.2003
Автор: Кубай Роман Іванович
МПК: G09B 5/00, G11B 13/00, G09B 19/06
Мітки: навчання, пристрій, мови, іноземної, правильної, вивченні, вимови, слів
Формула / Реферат:
Пристрій для навчання правильної вимови слів при вивченні іноземної мови, що містить джерело зразкової інформації і мікрофон, який відрізняється тим, що додатково містить навушники та блок звукової обробки, в якому є генератор інфразвукової частоти, звуковий змішувач і канал звукової затримки, причому вихід генератора інфразвукової частоти з’єднаний з першим входом звукового змішувача, третій вхід якого з'єднаний з виходом каналу звукової...
Попередній патент: Газовий пальник з роздільним живленням корон полум’я
Наступний патент: Боєприпас артилерійсько-ракетного комплексу (варіанти)
Випадковий патент: Дистанційно програмована медична система вливання та спосіб її дистанційного програмування