Пристрій для керування газами,зокрема для випробувального стенда газотурбінного двигуна
Формула / Реферат
1. Пристрій для керування газами, зокрема для випробувального стенда газотурбінного двигуна, який містить блок керування, що забезпечує вплив на власне керування газотурбінного двигуна (МТ1-МТ4) в залежності від вхідного сигналу ручного керування, визначеного органом (1, 2) ручного керування, який виконаний з можливістю подачі сигналу (CL, 10JS) кутового положення рукоятки у вигляді напруги, зокрема постійної напруги, який відрізняється тим, що блок керування містить:
автоматичний вимикач (4), який забезпечує перетворення сигналу кутового положення рукоятки в трансформований сигнал кутового положення (TRA) згідно з вибраним оператором законом керування, і
щонайменше один інтерфейс (70) для перетворення трансформованого сигналу (TRA) кутового положення в два синусоїдальних сигнали (COS-RES, SIN-RES) перетворювального типу, що забезпечує керування різними газотурбінними двигунами за допомогою одного і того самого пристрою, зокрема, газотурбінними двигунами, що використовують для власного керування сигнали синусоїдального типу.
2. Пристрій за п. 1, який відрізняється тим, що додатково містить привідний модуль (81) для прийому на вході трансформованого сигналу кутового положення (TRA) і видачі на виході команди власного керування для газотурбінних двигунів (МТ1) з гідромеханічним керуванням, при цьому автоматичний вимикач виконаний з можливістю автоматичного регулювання привідного модуля (81), який містить двигун та редуктор.
3. Пристрій за п. 2, який відрізняється тим, що привідний модуль призначений для електромеханічного впливу на важіль (89) регулятора газотурбінного двигуна з гідромеханічним керуванням, а автоматичний вимикач забезпечує керування важелем привідного модуля (81).
4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що інтерфейс (70) призначений для здійснення на основі сигналу збудження (EXC-RES), який надходить від регулятора газотурбінного двигуна (МТ3), перетворення трансформованого сигналу кутового положення (TRA) в два синусоїдальних сигнали (COS-RES, SIN-RES), які надходять на регулятор газотурбінного двигуна (МТ3), що використовує як власне керування сигнали синусоїдального типу.
5. Пристрій за п. 4, який відрізняється тим, що трансформований сигнал кутового положення містить або лінійний сигнал, або два тригонометричних сигнали.
6. Пристрій за будь-яким з пп. 4 та 5, який відрізняється тим, що автоматичний вимикач виконаний з можливістю видачі щонайменше двох трансформованих сигналів кутового положення на інтерфейс (70), при цьому інтерфейс (70) виконаний з можливістю видачі щонайменше чотирьох синусоїдальних сигналів (COS-RES1, SIN-RES1; COS-RES2, SIN-RES2), які передаються на регулятор надмірного типу газотурбінного двигуна (МТ3).
7. Пристрій за будь-яким з пп. 1-6, який відрізняється тим, що трансформований сигнал кутового положення (TRA) містить сигнал напруги для регулятора газотурбінного двигуна (МТ2), керованого за допомогою значень напруги.
8. Пристрій за будь-яким з пп. 1-7, який відрізняється тим, що орган ручного керування містить рукоятку (CL) або міні-ручку-джойстик (10JS).
9. Пристрій за будь-яким з пп. 1-8, який відрізняється тим, що орган ручного керування містить засіб керування екстреною зупинкою, зокрема натискну кнопку (SL, 10SL).
10. Пристрій за будь-яким з пп. 1-9, який відрізняється тим, що містить операторський інтерфейс (IHM), виконаний з можливістю забезпечення для оператора
вибору і додавання закону керування, що використовується; введення і зміни параметрів органа ручного керування.
11. Пристрій за п. 10, який відрізняється тим, що параметри органа ручного керування містять хід органа ручного керування, положення упорів рукоятки, необхідне значення кутового положення, прискорення на кутову одиницю та сповільнення на кутову одиницю.
Текст
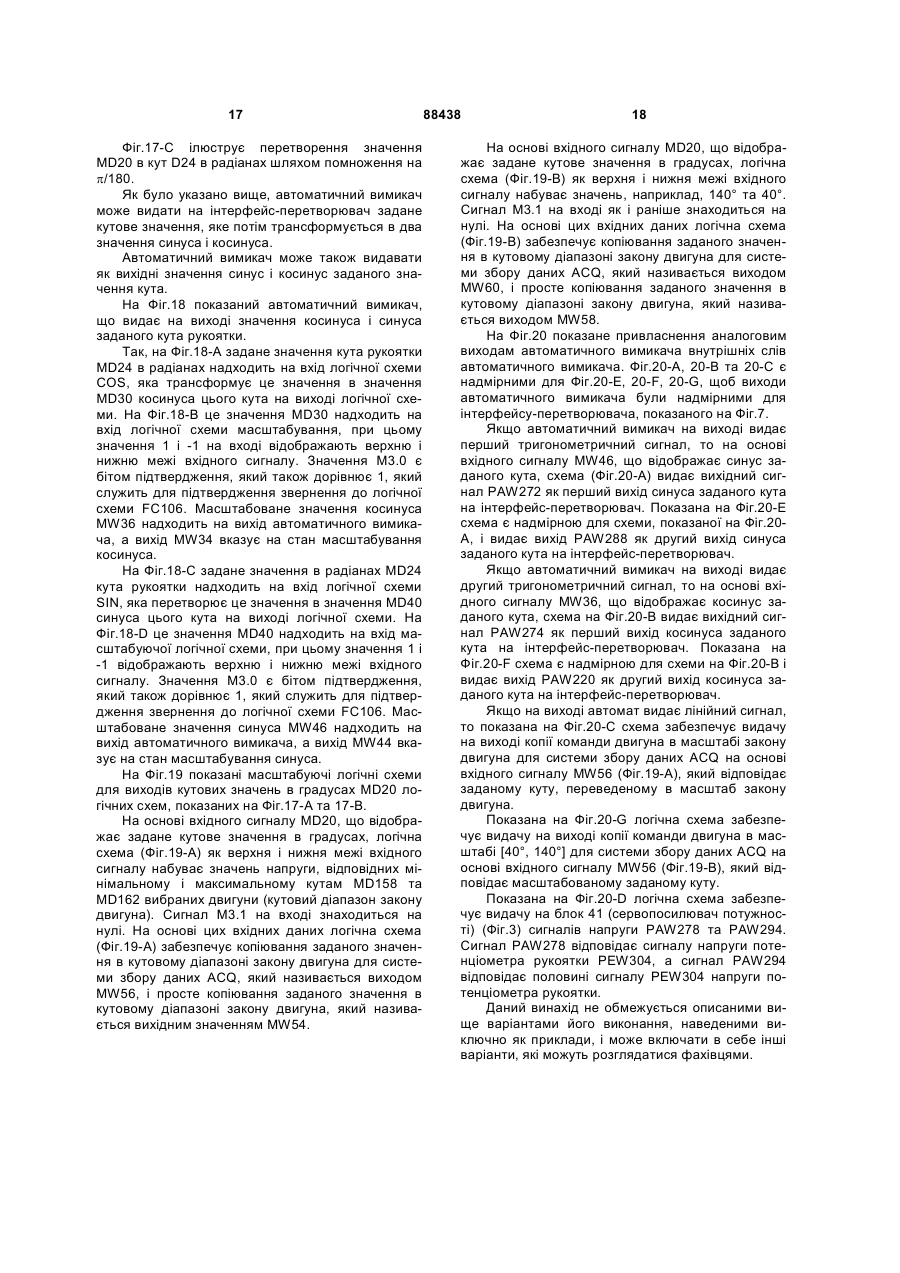
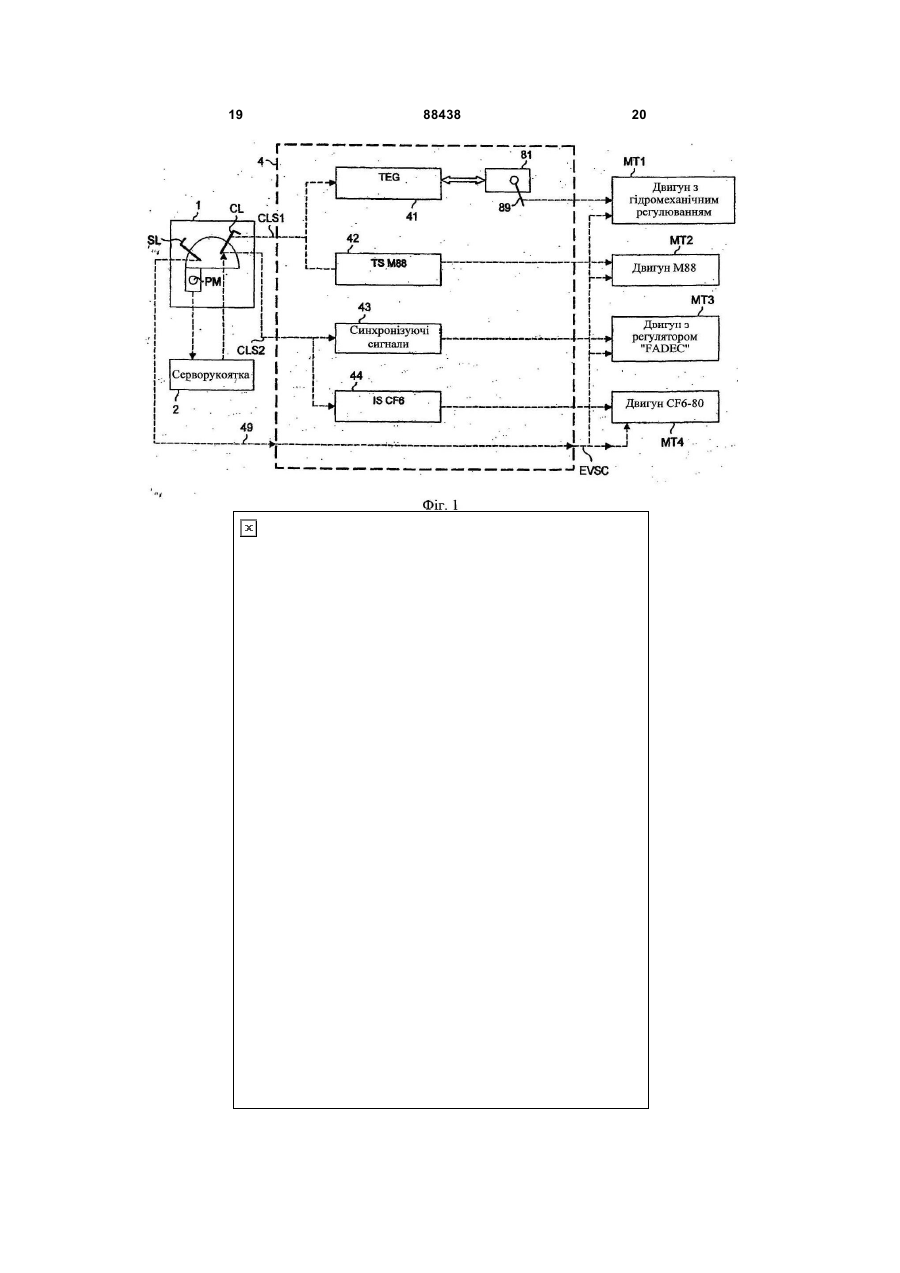
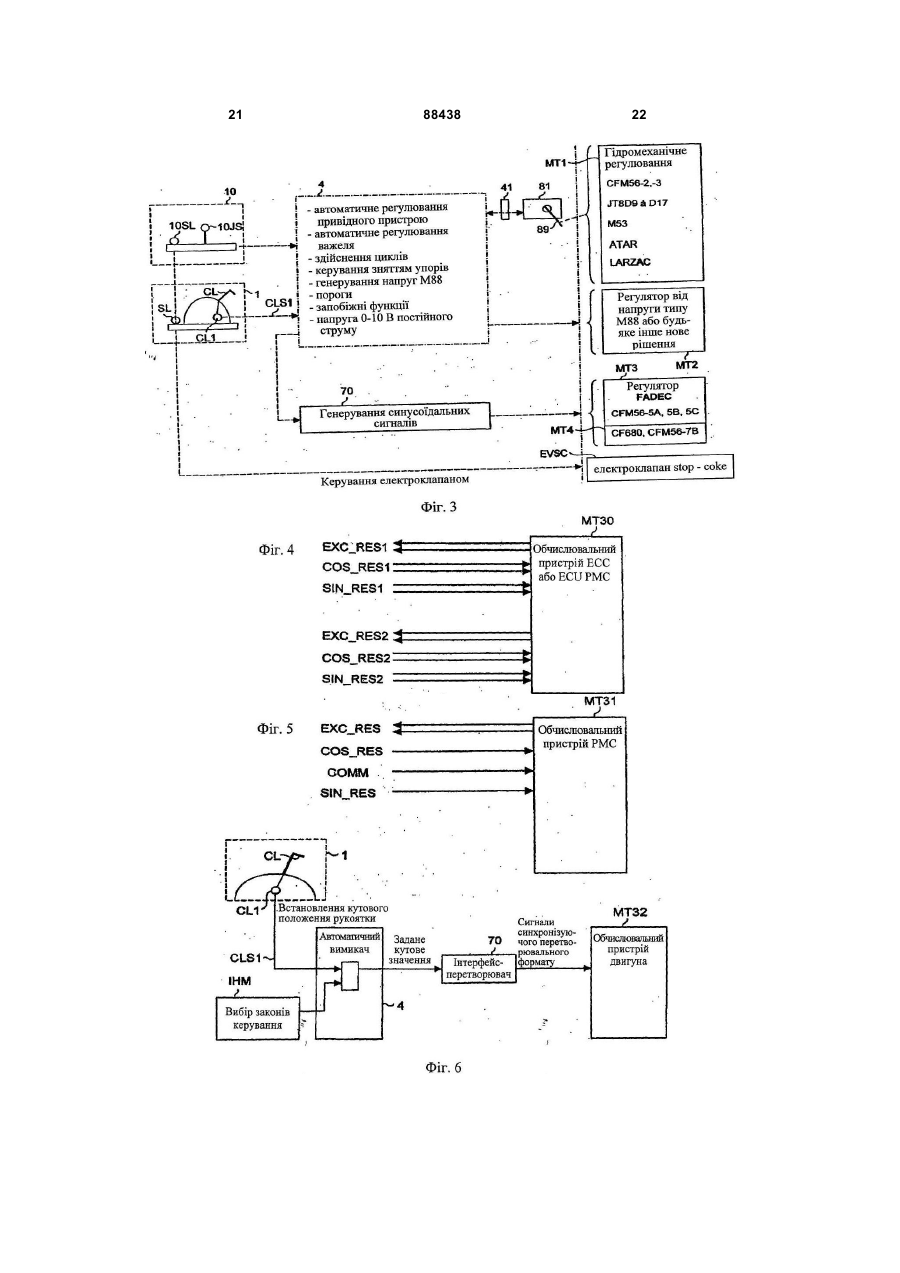
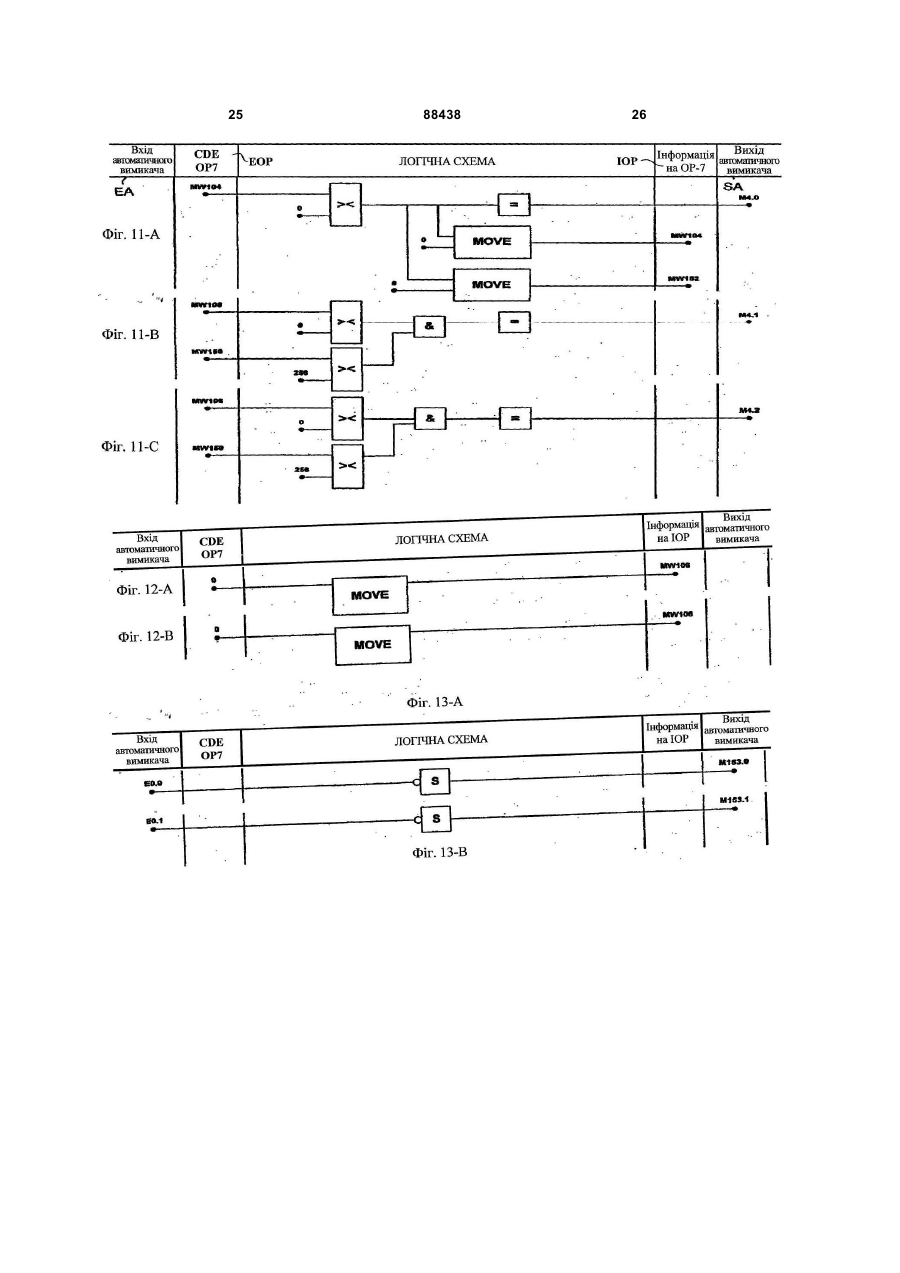
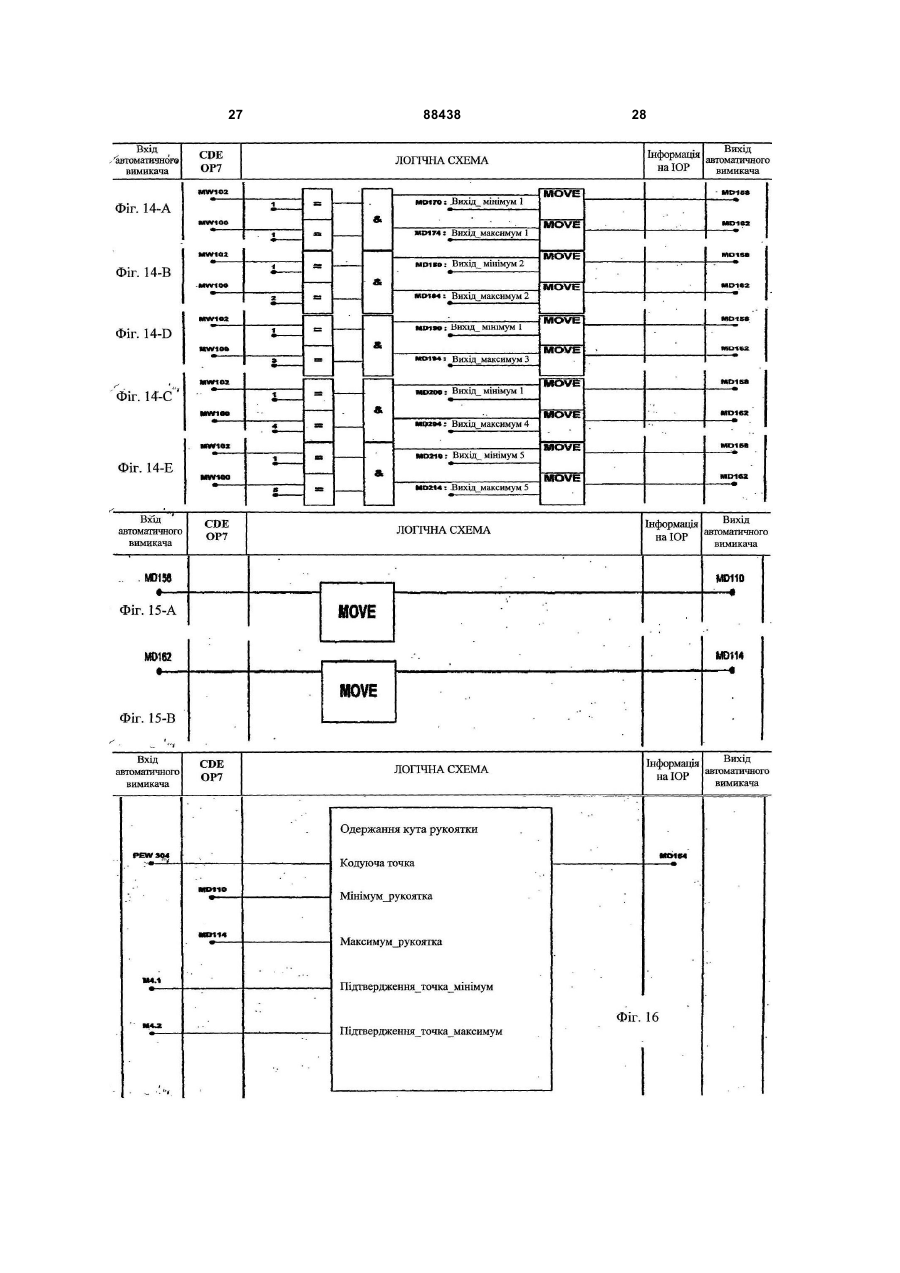
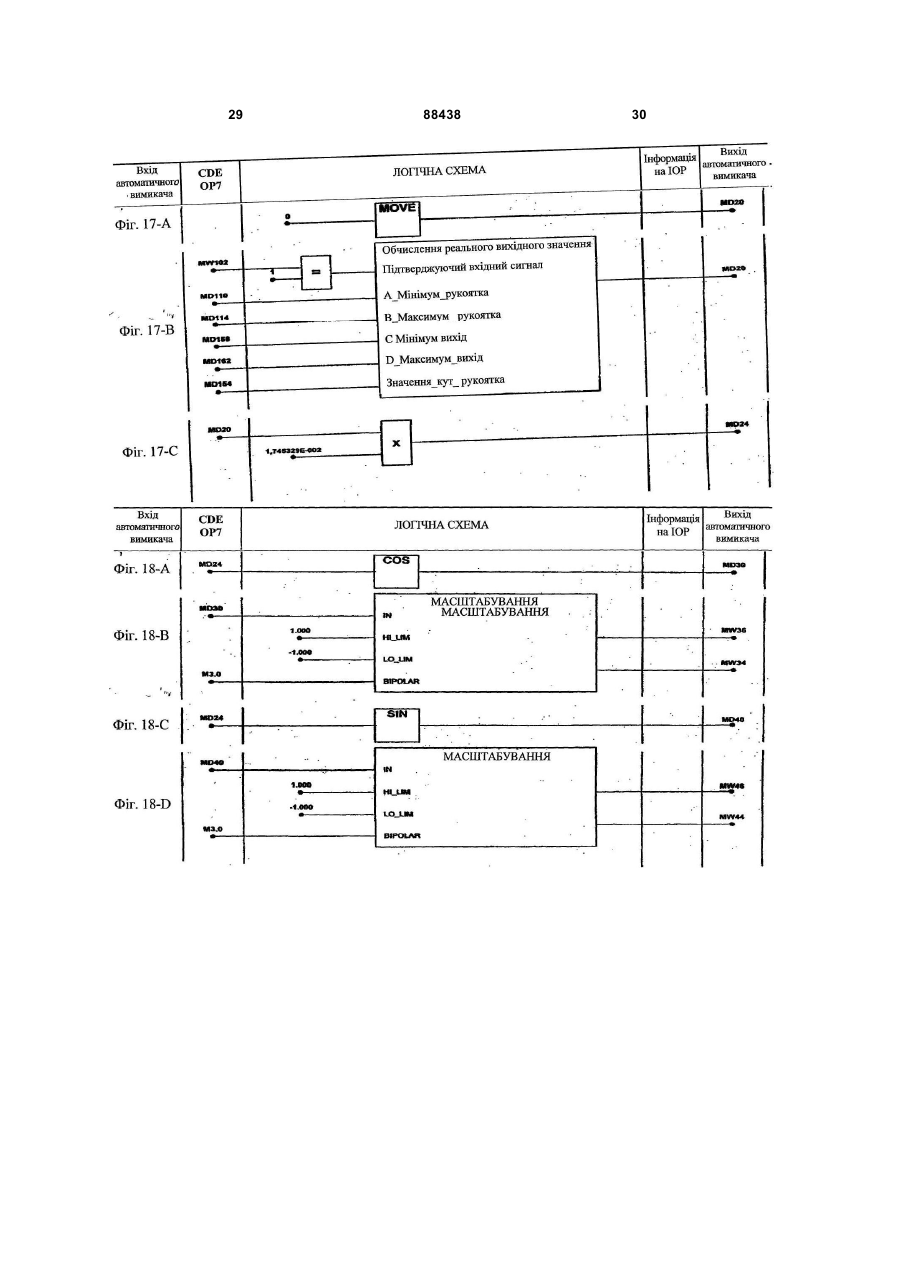
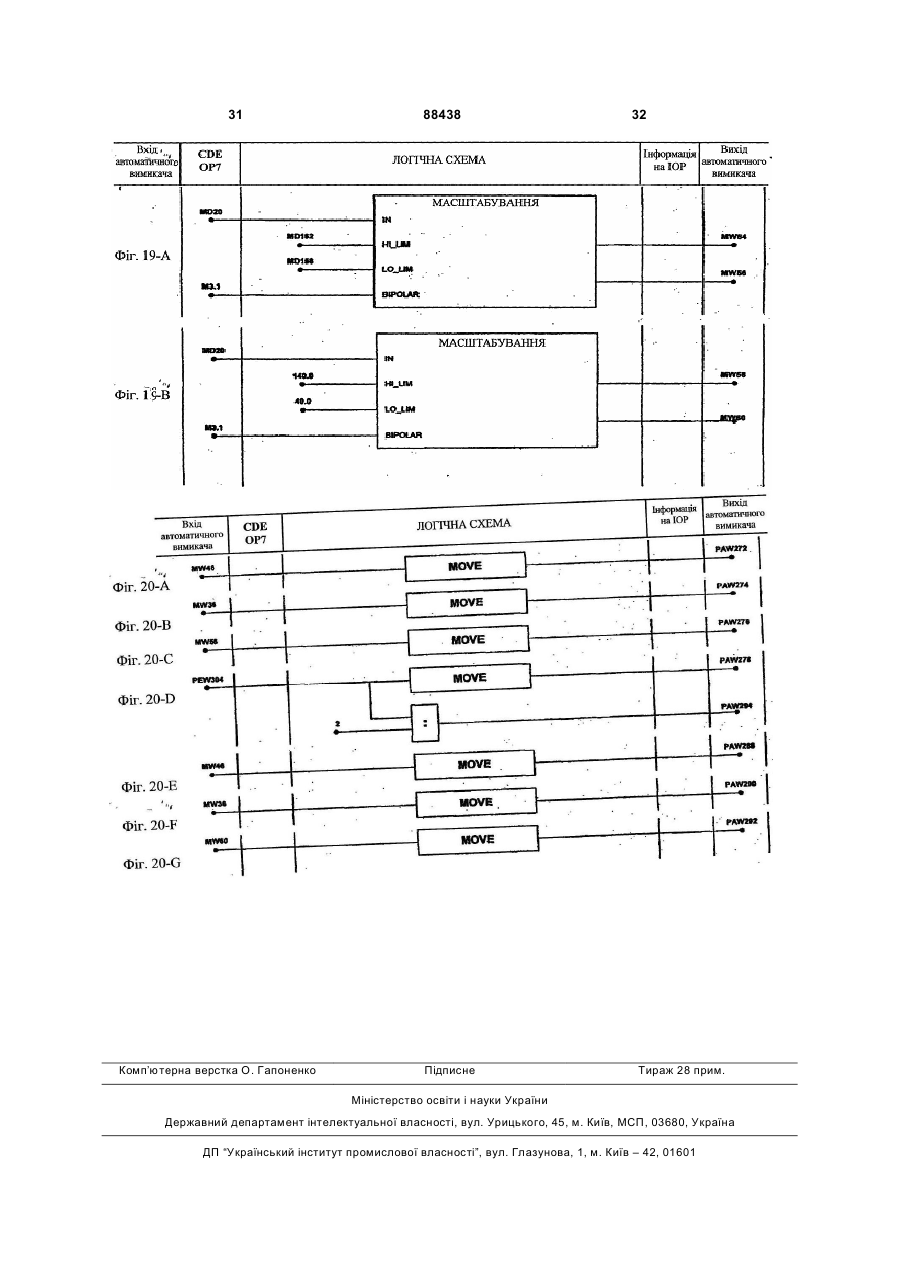
1. Пристрій для керування газами, зокрема для випробувального стенда газотурбінного двигуна, який містить блок керування, що забезпечує вплив на власне керування газотурбінного двигуна (МТ1-МТ4) в залежності від вхідного сигналу ручного керування, визначеного органом (1, 2) ручного керування, який виконаний з можливістю подачі сигналу (CL, 10JS) кутового положення рукоятки у вигляді напруги, зокрема постійної напруги, який відрізняється тим, що блок керування містить: автоматичний вимикач (4), який забезпечує перетворення сигналу кутового положення рукоятки в трансформований сигнал кутового положення (TRA) згідно з вибраним оператором законом керування, і щонайменше один інтерфейс (70) для перетворення трансформованого сигналу (TRA) кутового положення в два синусоїдальних сигнали (COSRES, SIN-RES) перетворювального типу, що забезпечує керування різними газотурбінними двигунами за допомогою одного і того самого пристрою, зокрема, газотурбінними двигунами, що використовують для власного керування сигнали синусоїдального типу. 2. Пристрій за п. 1, який відрізняється тим, що додатково містить привідний модуль (81) для прийому на вході трансформованого сигналу кутового положення (TRA) і видачі на виході команди власного керування для газотурбінних двигунів (МТ1) з гідромеханічним керуванням, при цьому автоматичний вимикач виконаний з мож 2 (19) 1 3 88438 4 інтерфейс (IHM), виконаний з можливістю забезпечення для оператора вибору і додавання закону керування, що використовується; введення і зміни параметрів органа ручного керування. 11. Пристрій за п. 10, який відрізняється тим, що параметри органа ручного керування містять хід органа ручного керування, положення упорів рукоятки, необхідне значення кутового положення, прискорення на кутову одиницю та сповільнення на кутову одиницю. Даний винахід відноситься до газотурбінних двигунів, і зокрема, він стосується авіаційних реактивних двигунів. Існують найрізноманітніші варіанти керування реактивними двигунами, які у даному описі називаються просто двигунами. При нормальній експлуатації двигуна не виникає ніяких проблем. Однак в деяких випадках, таких як стендові випробування двигунів, виникає необхідність використання найрізноманітнішого обладнання, і навіть різних випробувальних стендів, кожний з яких призначений для випробування конкретного типу двигуна, а це зрештою вимагає значних капіталовкладень. Задачею даного винаходу є поліпшення даної ситуації. Згідно з даним винаходом запропонований пристрій для керування газами для авіаційного газотурбінного двигуна, який містить блок керування, виконаний з можливістю впливу на власне керування газотурбінного двигуна в залежності від вхідного сигналу ручного керування, визначеного органом ручного керування, в якому орган ручного керування виконаний з можливістю подачі сигналу кутового положення рукоятки у вигляді напруги, зокрема, постійної напруги. Згідно з основною відмітною ознакою даного винаходу блок керування характеризується тим, що містить автоматичний вимикач, виконаний з можливістю перетворення сигналу кутового положення рукоятки у трансформований сигнал кутового положення згідно з вибраним законом керування, і щонайменше один інтерфейс, виконаний з можливістю перетворення трансформованого сигналу кутового положення в два синусоїдальних сигнали, зокрема перетворювача, що забезпечує керування різними газотурбінними двигунами за допомогою одного і того самого пристрою, зокрема газотурбінними двигунами, що використовують для власного керування сигнали синусоїдального типу. Згідно з переважним варіантом втілення даного винаходу пристрій додатково містить привідний модуль, виконаний з можливістю прийому на вході трансформованого сигналу кутового положення і з можливістю видачі на виході команди керування газотурбінних двигунів з гідромеханічним керуванням, при цьому автоматичний вимикач виконаний з можливістю автоматичного регулювання привідного модуля, який містить двигун та редуктор. Переважно привідний модуль виконаний з можливістю електромеханічного впливу на важіль регулятора газотурбінного двигуна з гідромеханічним керуванням, і, крім того, автоматичний вими кач забезпечує можливість керування важелем привідного модуля. Як варіант, інтерфейс на основі сигналу збудження, переданого регулятором газотурбінного двигуна, забезпечує перетворення трансформованого сигналу кутового положення в два синусоїдальних сигнали, що передаються на регулятор газотурбінного двигуна, який для власного керування використовує сигнали синусоїдального типу. Переважно трансформований сигнал кутового положення містить або лінійний сигнал, або два тригонометричних сигнали. Інші відмітні ознаки і переваги даного винаходу будуть більш очевидні з нижченаведеного докладного опису з посиланнями на прикладені креслення, на яких: Фіг.1 зображає принципову схему випробувального стенда, для роботи на різних типах двигунів, вказаних на схемі, згідно з винаходом; Фіг.2 - більш докладну принципову схему стенда, згідно з винаходом; Фіг.3 - принципову схему випробувального стенда, для роботи на різних типах двигунів, згідно з винаходом; Фіг.4 - схему обміну сигналами між генератором синусоїдальних сигналів випробувального стенда та обчислювальним пристроєм першого типу, згідно з винаходом; Фіг.5 - схему обміну сигналами між генератором синусоїдальних сигналів випробувального стенда та обчислювальним пристроєм другого типу, згідно з винаходом; Фіг.6 - принципову схему випробувального стенда для двигуна з керуванням синусоїдальними сигналами, згідно з винаходом; Фіг.7 - схему генератора синусоїдальних сигналів випробувального стенда для роботи з обчислювальним пристроєм другого типу, згідно з винаходом; Фіг.8 - принципову схему випробувального стенда, який містить операторський інтерфейс, згідно з винаходом; Фіг.9 - схему виконання операторського інтерфейсу, згідно з винаходом; Фіг.10 - схему послідовності блоків, що використовуються в логічних блок-схемах логічних схем автоматичного вимикача, згідно з винаходом; Фіг.11А-11С - логічні схеми автоматичного вимикача, які представлені у вигляді логічних блоксхем і які забезпечують одержання запитів від оператора, згідно з винаходом; Фіг.12А та 12В - інші логічні схеми автоматичного вимикача, які представлені у вигляді логічних блок-схем і які забезпечують одержання запитів від оператора, згідно з винаходом; 5 Фіг.13А та 13В - логічні схеми автоматичного вимикача, які представлені у вигляді логічних блок-схем і які забезпечують керування перебоями, згідно з винаходом; Фіг.14А-14Е - п'ять логічних схем автоматичного вимикача, які представлені у вигляді логічних блок-схем і які забезпечують одержання параметрів двигуна, згідно з винаходом; Фіг.15А та 15В - перші логічні схеми автоматичного вимикача, які представлені у вигляді логічних блок-схем і які забезпечують одержання мінімального і максимального значень кутів рукоятки для вибраного двигуна, згідно з винаходом; Фіг.16 - другу логічну схему автоматичного вимикача, яка представлена у вигляді логічної блоксхеми і яка забезпечує одержання кута рукоятки на основі сигналу від потенціометра рукоятки, згідно з винаходом; Фіг.17А-17С - три логічні схеми автоматичного вимикача, які представлені у вигляді логічних блок-схем і які забезпечують на виході обчислення кута рукоятки в градусах або радіанах згідно з винаходом; Фіг.18А-18D - дві логічні схеми автоматичного вимикача, які представлені у вигляді логічних блок-схем і які забезпечують обчислення і масштабування косинусів та синусів на основі вихідних значень, згідно з винаходом; Фіг.19А та 19В - дві логічні схеми автоматичного вимикача, які представлені у вигляді логічних блок-схем і які забезпечують копіювання команди керування двигуном в масштабі закону двигуна і копіювання команди керування двигуном в заданому масштабі для системи збору даних ACQ, згідно з винаходом; Фіг.20А-20G - логічні схеми автоматичного вимикача, які представлені у вигляді логічних блоксхем і які забезпечують подачу аналогових вихідних сигналів автоматичного вимикача, зокрема, для додаткового обчислювального пристрою, згідно з винаходом. У даному винаході розглядається модульний комплекс, який забезпечує керування газами реактивних двигунів (електромагнітне або електричне керування). Керування газами може здійснюватися трьома способами в залежності від типу регулювання реактивного двигуна: за допомогою привідного пристрою, - електромагнітне керування регулюванням реактивного двигуна; за допомогою синусоїдальних сигналів синхронізуючого та перетворювального типу, що подаються безпосередньо на обчислювальні пристрої реактивного двигуна; за допомогою генерування напруг, - специфічні закони, що застосовуються для обчислювальних пристроїв реактивного двигуна. На Фіг.1 представлена принципова схема випробувального стенда для роботи на різних типах двигунів, вказаних на цій схемі. На Фіг.2 більш детально показана та сама схема. Пристрої на Фіг.1 та 2, є частиною установки, яка до цього часу використовувалася заявником і опис якої наводиться нижче. 88438 6 Орган 1 керування, що використовується оператором, який проводить випробування на двигуні, містить важіль CL, що забезпечує керування газами, і інший важіль SL, що забезпечує відсічення подачі палива в двигун, яке звичайно здійснюється за допомогою електричного клапана, який називається «stop-coke» і міститься у будь-якому двигуні літака цивільної авіації. Додатково орган керування може містити фізичну рукоятку РМ для забезпечення власне керування газами. У відомому пристрої ця рукоятка РМ діє на важіль CL через привід 2 автоматичного регулювання положення, який називається «серворукояткою». З важелем CL взаємодіє датчик CL1 кутового положення типу потенціометра. Кутове положення або його вихідне значення передається електричним шляхом у вигляді аналогового сигналу положення CLS1, зокрема, у вигляді безперервного потенціометричного сигналу напруги на блок 4 керування, описаний нижче. Крім того, з важелем CL може також взаємодіяти інший кутовий датчик CL2 типу перетворювача, що видає сигнали CLS2 синусоїдального типу, які забезпечують інший варіант відображення положення важеля CL. Ці сигнали надалі передаються або не передаються через модуль формування сигналів в залежності від типу реактивного двигуна, а потім на обчислювальний пристрій. В авіаційних реактивних двигунах, які називаються в цьому випадку просто двигунами, існують різні моди (які називаються також законами) керування газами, зокрема, в залежності від класу літального апарату, від покоління реактивного двигуна, що використовується в цих класах, і від конструктора. Позицією МТ1 позначений двигун з керуванням газами за допомогою гідромеханічного регулювання. Ним може бути один з наступних двигунів: CFM56-2, CFM56-3, JT8D9 - JT8D17, М53, ATAR, LARZAC, при цьому всі є двигунами, які виробляються компанією заявника. Вхідним органом керування газами з боку двигуна є важіль 89. Блок 4 керування містить висувний електронний блок 41 (TEG), який діє на привідний пристрій 81, який, в свою чергу, керує важелем 89. Терміном "висувний електронний блок" позначений модуль, який може бути виконаний у вигляді висувного ящика, що містить електронні стояки, який впливає на засоби типу приводу, регулятора та інш. Позицією МТ2 позначений двигун з керуванням газами за допомогою електричної напруги, наприклад, модель М88 заявника. У цьому випадку блок 4 керування містить спеціально виконаний: для цього двигуна висувний блок 42 (TSM88), який призначений для подачі відповідної напруги. Позицією МТ3 позначений двигун з керуванням газами за допомогою синхронізуючого і перетворювального сигналів, зокрема, для регулятора «FADEC» («Full Authority Digital Engine Control»), що застосовується в двигунах CFM56-5А/5В/5С. Такі двигуни можуть працювати або в режимі керування газами ECU («Engine Control Unit»), або в режимі електронного керування EEC («Electronic 7 Engine Control»). Такий регулятор FADEC передбачає наявність надмірного обчислювального пристрою. Позначення МТ3 відноситься також до двигунів, керуючий обчислювальний пристрій яких не є надмірним, наприклад, PMC («Power Management Control»), для двигуна CF6 80 С2 PMC/PMUX. Для двигуна типу МТ3 блок 4 керування містить рівень 43, який може працювати шляхом простого копіювання сигналів CLS2, що надходять від важеля CL, якщо останній містить синхронізуючий і перетворювальний вихід. Позицією МТ4 позначений двигун з керуванням газами за допомогою синхронізуючих і перетворювальних сигналів, наприклад, двигун CF6 80 Е1 FADEC, CF680 С2 FADEC або CFM 56-7B заявника. У цьому випадку блок 4 керування містить спеціальний інтерфейс 44 (ISCF6), який може працювати з узгодженням сигналів, що надходять від важеля CL, якщо останній містить синхронізуючий і перетворювальний вихід. На практиці елементи 1 та 4 (за винятком 89) знаходяться в залі керування. При необхідності використання привідного пристрою 89 його встановлюють на двигуні або безпосередньо поруч з ним. Важіль-рукоятка керування CL повинен забезпечувати такі функції, деякі з яких вже згадувалися: формування електричного сигналу, що є функцією кутового положення важеля-рукоятки; передачу сигналів керування у вигляді двох синхронізуючих сигналів на обчислювальні пристрої реактивного двигуна (FADEC); позиціонування важеля в точному кутовому положенні (зокрема, в режимах малого газу, повного газу, форсажу) за допомогою регульованих упорів; швидке прискорення за допомогою гашетки зняття упорів; тонке регулювання (демультиплікацію) приводом переміщення важеля; відсічення подачі палива важелем керування (для керування електроклапаном stop-coke). У блоці 4 відповідний елемент із 41-44 забезпечує такі функції: приймає електричний сигнал від рукоятки керування і виводить на монітор кут приводу; видає регульовані сигнали порогових значень (сухі контакти) в залежності від кута рукоятки; здійснює автоматичне регулювання привідного пристрою; видає сигнал копіювання положення привідного пристрою (0-10В постійного струму); у разі необхідності приймає зовнішній керуючий сигнал 0-10В постійного струму для керування привідним пристроєм (замість рукоятки); забезпечує коректування параметрів рукоятки керування і привідного пристрою (настройка на нуль градусів) і здійснення регулювання (набір потужності, максимальна потужність, привід, пороги і т.д.); 88438 8 забезпечує керування поверненням в режим малого газу привідного пристрою при перевищенні моменту привідного пристрою; забезпечує дистанційне керування перекладом привідного пристрою в вихідне положення за запитом оператора. Нарешті, привідний пристрій, який містить двигун або редуктор, виконує такі функції: забезпечує керування реактивними двигунами з гідромеханічним регулюванням за допомогою електромеханічного впливу на важіль регулятора реактивного двигуна; повертає, у разі необхідності, важіль регулятора реактивного двигуна в положення малого газу (забезпечення безпеки) за запитом оператора через висувний блок автоматичного регулювання і керування потужністю, при відключенні електричного живлення привідного пристрою або при виявленні перевищення моменту. У залежності від типів реактивних двигунів можуть використовуватися різні варіанти привідних пристроїв (зокрема, які впливають на хід, крутний момент або момент повернення в режим малого газу). Для варіантів, показаних на Фіг.1 та 2, можна також передбачити: електронний висувний блок автоматизації важеля-рукоятки (автоматичне регулювання важелярукоятки керування), що забезпечує здійснення циклічного керування (або керування в автоматичному режимі) і в той самий час залишає оператору можливість у будь-який момент взяти на себе керування реактивним двигуном; спеціальний електронний висувний блок генерування законів двигуна М88 з функцією відстеження і виведення на монітор значень вихідних сигналів напруги. Крім того, необхідно уточнити закон керування. Зовсім не обов'язково, щоб двигун підкорявся команді від органу керування таким самим чином, як і інший двигун тієї ж категорії або іншої категорії. Крім того, висувний блок 41 містить вхід зовнішнього керування для регулювання і виведення на монітор порогових сигналів; якщо мова йде про пристрій, що входить до складу двигуна М88, то для цього двигуна може бути використаний спеціальний висувний блок 42; аналогічно рівень 43 може бути спеціально виконаний для регулятора, який називається FADEC; нарешті, інтерфейс 44 може бути адаптований для спеціально двигуна CF6. Надзвичайне значення має точність закону керування. Дійсно, будь-яка неточність в ланцюгу керування може призвести до пошкодження і навіть до руйнування двигуна, в той час як його випробування переслідують абсолютно інший результат. Елементи 41-44 можуть бути виконані таким чином: висувний блок 41 містить стояк автоматичного регулювання положення привідного пристрою 81; спеціальний висувний блок 42 містить спеціальний стояк для М88, що забезпечує розподіл ке 9 руючої напруги на чотири аналогових сигналу керування двигуном; в описаному варіанті виконання рівень 43 є простою передачею сигналів, що надходять від важеля LC; інтерфейс 44 містить стояк, який забезпечує зміщення закону керування газами і адаптований до закону керування двигуном. Установка, показана на Фіг.1 та 2, забезпечує наступні можливості: забезпечує утримання важеля-рукоятки ручного керування в положенні за допомогою регульованого гальма; ергономічність важеля-рукотяки ручного керування, аналогічного рукоятці керування на літаку, тобто міцність, легкість маніпулювання; виконує функції забезпечення безпеки, такі як механізм автоматичного повернення в режим малого газу, інтегрований в привідний пристрій, при виявленні перевищення моменту, або повернення при подачі зовнішньої команди (команда оператора на висувний блок автоматичного регулювання або встановлення сухого контакту шляхом натиснення оператором кнопки); забезпечення блока керування запасним живленням від джерела напруги 28 вольт. Разом з тим вона має ряд незручностей, пов'язаних з типами реактивних двигунів: складна багатомодульна конструкція, що залежить від типів реактивних двигунів, тобто, установка, зокрема її блок 4, містить тим більшу кількість елементів, чим більше різних типів реактивних двигунів необхідно випробувати на стенді; слабка гнучкість, оскільки кожен раз, коли потрібно випробовувати новий тип реактивного двигуна, доводиться розробляти нові адаптативні варіанти. У результаті підвищуються інвестиційні витрати, тим більше що постійно зростає потреба в проведенні випробувань все більшої кількості двигунів. Крім того, в цей час необхідно провести періодичні перевірки ресурсу в автоматичному режимі (вимоги Журналу льотно-експлуатаційних навантажень). Здійснення таких перевірок може бути забезпечене шляхом додавання опції "висувний блок автоматизації". Це також збільшує витрати, ускладнив застосування та обслуговування, а також знижує надійність роботи комплексу загалом через збільшення числа спеціальних висувних блоків. Вивчаючи досвід проведення тягових випробувань, заявник зазначив, що замість використання множини модулів, представлених на Фіг.1 та 2, можна здійснити варіант (Фіг.3), який об'єднує такі ж функції в одному модулі керування, який містить автоматичний вимикач і виконаний з можливістю забезпечення адекватного співвідношення між операторською величиною, що визначається органом ручного керування, і привідною величиною, що сприймається двигуном на стенді, причому з урахуванням закону керування, що застосовується саме для даного двигуна. 88438 10 Автоматичний вимикач 4 може працювати з модулем 1 ручного керування, аналогічним органу ручного керування 1, представленому на Фіг.1 та 2, при цьому відпадає необхідність у використанні додаткового датчика CL2, що видає перетворювальні сигнали. Автоматичний вимикач 4 може також працювати з цифровим модулем 10 ручного керування, що приводиться в дію рукояткою або мініручкою керування («джойстик») 10JS. Переважно її доповнюють кнопкою 10SL для керування відсічкою подачі палива. Якщо одночасно використовують модуль 1 ручного керування і цифровий модуль 10 ручного керування, то кнопки SL та 10SL можуть бути приєднані в паралель. Електроклапан «stop-coke» (не показаний) може розглядатися як загальний для всіх типів цивільних авіаційних двигунів, що проходять стендові випробування. Аналоговий кутовий вихід автоматичного вимикача (Фіг.3) 4 з'єднаний з генератором 70 синусоїдальних сигналів (перетворених) (який може розглядатися як вбудований в автоматичний вимикач 4). Насправді генерування перетворених сигналів є однією із складностей, що зустрічаються, коли потрібно реалізувати "універсальну" систему ручного керування, яка може працювати з найрізноманітнішими пристроями власного керування газами двигунів. Сигнал CLS1 кутового положення рукоятки, який виходить з модуля 1 (Фіг.6) (або 10) ручного керування, наприклад, у вигляді постійної напруги надходить в автоматичний вимикач 4. Останній перетворює цей сигнал в трансформований сигнал кутового положення, що буде детальніше пояснено нижче. Перетворення полягає у наступному: застосування закону керування двигуном, який може бути вибраний оператором через операторський інтерфейс, наприклад, операторський інтерфейс ІНМ, опис якого наведений нижче; перетворення кутового діапазону TLA фізичного ходу рукоятки (від -90° до +90°) в кут TRA для обчислювального пристрою (наприклад, від 38° до 85,5°). Цей трансформований сигнал кутового положення TRA називають також сигналом заданого кутового значення на виході автомата. Цей сигнал подається на генератор 70 синусоїдальних сигналів, який називається також «інтерфейсомперетворювачем». Цей «інтерфейсперетворювач» на основі заданого кутового сигналу дозволяє генерувати два синусоїдальних сигнали для регулятора МТ3 двигуна, зокрема, для обчислювального пристрою МТ32 регулятора двигуна. У даному описі використовуються наступні позначення: «TRA» («Throttle Resolver Angle») є родовим позначенням заданого значення кута керування газами; «TRA_DC10» означає аналоговий сигнал від 0 до +10 вольт, який відображає кут TRA в діапазоні, наприклад, від -90 до 90°; 11 «TRA_Sin10» та «TRA_Cos10» означають два аналогових сигнали, кожний від 0 до +10 вольт, які відображають відповідно синус і косинус кута TRA в діапазоні від -1 до +1, при цьому дані сигнали дозволяють працювати в кутовому діапазоні від 0° до 180°; «TLA» означає значення кута керування газами. Потрібно нагадати, що регулятор, який називається «FADEC», за своєю суттю передбачає наявність надмірного обчислювального пристрою в двигуні, який може працювати або в режимі ECU, або в режимі EEC. Як показано на Фіг.4, відповідний вхідний інтерфейс з боку двигуна, який означається МТ30, має два канали: канал 1, який активується синусоїдальним сигналом збудження EXC_RES1, що надходить від МТ30, знаходиться в очікуванні надходження двох сигналів COS_RES1 та SIN_RES1, що модулюють сигнал EXC_RES1 відповідно в залежності від косинуса і синуса кута TRA з точністю до одного множника; канал 2 здійснює те саме в режимі надмірності з сигналами збудження EXC_RES2 і зворотними сигналами COS_RES2 та SIN_RES2. Така надмірність відповідає вимозі безпеки і надійності. Звичайно: EXC_RESi: 7,07 вольт (±2,0%) при 3000Гц (±10%) К=0,492 (±0,025%) EXC_SINi=К*EXC_RESi*sin(TRA) EXC_COSi=К*EXC_RESi*cos(TRA) На Фіг.7 показаний блок інтерфейсперетворювач, призначений для роботи з надмірним регулятором сигналів. Цей блок містить два інтерфейси-перетворювачі 70-1 та 70-2, кожний з яких на вході приймає сигнал кутового значення від автомата. Останній містить два аналогових виходи, кожний з яких з'єднаний з окремим інтерфейсом-перетворювачем. Для двигуна з обчислювальним пристроєм РМС (Фіг.5) принцип надмірності не застосовується. Робота відбувається аналогічним чином з сигналами збудження EXC_RES і зворотними сигналами COS_RES та SIN_RES при наявності загального провідника, який з'єднаний з масою і позначається СОММ. Звичайно: EXC_RES: 7,07 вольт (±2,0%) при 3000Гц (±10%) EXC_SIN=EXC_RES*sin(TRA) EXC_COS=EXC_RES*cos(TRA) Якщо заданий сигнал на виході автомата є лінійним сигналом типу «TRA_DC10», інтерфейсперетворювач 70 переводить цей сигнал в масштаб -90°, +90° і видає синусоїдальні сигнали типу EXC_SINi=К*EXC_RESi*sin(масштабований TRA-DC10) EXC_COSi=К*EXCRESi*cos(масштабований TRA-DC10) Інтерфейс-перетворювач, що приймає сигнал лінійного аналогового типу (такого як постійна напруги), може бути реалізований за допомогою 88438 12 відомих програм моделювання синхронізуючих/перетворювальних сигналів, або центрального блоку, який взаємодіє з платою цифрового/перетворювального перетворення відповідно до стандартного формату (наприклад, VME, VXI, РСІ, ISA...), або компонентів, що використовуються в області вимірювання і забезпечують цифрове/перетворювальне перетворення та аналогове/перетворювальне перетворення, причому ці компоненти існують в найрізноманітніших формах (моноліт, гібрид, модуль). Ці моделювальні програми, плати або компоненти випускаються американськими компаніями, такими як Data Device Corporation, North Atlantic Instrument, Computer Conversion Corporation. Якщо сигнал на виході автоматичного вимикача є парою тригонометричних сигналів типу «TRA_Sin10» та «TRA_Cos10», інтерфейсперетворювач 70 здійснює переклад в масштаб від -1 до 1 і видає синусоїдальні сигнали типу EXC_SINi=К*EXC_RESi*(масштабований TRA_Sin10) EXC_COSi=К*EXC_RESi*(масштабований TRA_Cos10) Інтерфейс-перетворювач, що приймає два сигнали тригонометричного типу, може бути електронною платою, яка містить класичні компоненти, що забезпечують функції множення аналогових сигналів. Як було указано вище, оператор може вибирати закон керування двигуном, тобто вибирати двигун, з яким пов'язаний кутовий діапазон, що дозволяє йому масштабу вати вхідний сигнал автоматичного вимикача 4. Для цього автоматичний вимикач 4 з'єднаний з людино-машинним інтерфейсом, який називається ІНМ (Фіг.6) і більш детально (Фіг.8). Цей інтерфейс служить також для швидкого візуального контролю за значеннями параметрів і сигналами пристрою керування. Як показано на Фіг.8, інтерфейс може бути виконаний у вигляді екрана, на який виводиться, наприклад, вікно Μ для рукоятки за допомогою прикладної програми «applet». У вікно виводяться дані, такі як кутове положення рукоятки, яке відповідає сигналу CLS1, що надходить в автомат, значення заданого сигналу кутового положення рукоятки, положення упорів рукоятки, що визначаються як: упор малого газу на землі; упор малого газу в польоті; упор порога 1, такий як упор злітного режиму TAOF (Take Off); упор порога 2, такий як упор крейсерського режиму МХСТ (Maxi Continue). Людино-машинний інтерфейс дозволяє також змінювати кутове положення рукоятки шляхом подачі відповідних команд на автомат. Для цього оператор може натискати на віртуальні кнопки М++, М+, М- та М--, виведені на екран, щоб збільшити або зменшити кутове положення рукоятки на основі значення, виведеного на екран. Він також може безпосередньо вводити необхідне значення кутового положення. Віртуальна кнопка М++ має крок приросту (або градієнт), більший, ніж крок 13 приросту віртуальної кнопки М+. Те ж саме відноситься і до кнопок М- та М--. На Фіг.9 показані інші віртуальні кнопки, що служать для приведення рукоятки у положення упора малого газу в польоті (віртуальна кнопка RV), приведення рукоятки у положення упора малого газу на землі (віртуальна кнопка RS), для зазначення того, що оператор пропускає упор (віртуальна кнопка В). Положення індикаторів І, які переміщаються по градуйованих шкалах, показують значення чотирьох упорів. Оператор може натискати на віртуальні кнопки М++, М+, М- та М--, виведені на екран, щоб збільшити або зменшити поточне значення С. Значення упорів малого газу на землі і в польоті також можуть бути змінені оператором. Ці значення передаються на автоматичний вимикач 4 комп'ютером типу PC, який називається федератором і використовується як процесор обміну між автоматом та операторським екраном. Автоматичний вимикач 4 передає ці значення на фізичну рукоятку 1. Таким чином, оператор може вибирати і додавати закон керування, а також вводити і змінювати параметри органу ручного керування. Параметри органу ручного керування містять хід органу ручного керування, положення упорів рукоятки, значення необхідного кутового положення, прискорення на кутову одиницю і сповільнення на кутову одиницю, пов'язане або з введенням кута безпосередньо оператором, або з введенням за допомогою віртуальних кнопок М++, М+, М-, М-(що відповідає кроку приросту), або з положенням кожного упора. Вибір оператором закону керування двигуном полягає у виборі необхідного типу двигуна (або газотурбінного двигуна). Як показано на Фіг.8, вибраний двигун дозволяє направити на електронний висувний блок сигнал відповідного типу, після чого висувний блок 41 діє на привідний пристрій 81. На Фіг.11-22 показаний приклад виконання автоматичного вимикача у вигляді логічних схем. Людино-машинний інтерфейс типу операторського пульта, наприклад, графічний інтерфейс, з'єднаний з автоматичним вимикачем, дозволяє оператору вводити дані для здійснення випробувань вибраного двигуна на випробувальному стенді. Цей графічний інтерфейс дозволяє також оператору стежити за ходом випробування. На Фіг.10 представлені значення символів, що використовуються в логічних схемах, показаних на Фіг.11-22. Символ 100 об'єднує два входи в один вихідний сигнал. Символ 108 показує встановлення вхідного сигналу на значення 1. Символ 110 показує встановлення вхідного сигналу на значення 0. Символи 112 та 114 означають логічні тригерні схеми. Символи 114 та 116 показують запуск по фронту або по спаду сигналу. Символ 120 показує тимчасову затримку сигналу. Символ 124 означає рівність між вхідним сигналом і вихідним сигналом. Символ 126 перевіряє перевищення основного сигналу по відношенню до деякого значення і видає основний сигнал як вихідний сигнал. Символ 88438 14 128 перевіряє переважання або рівність між основним сигналом та значенням і видає основний сигнал як вихідний сигнал. Символ 130 перевіряє переважання значення по відношенню до основного сигналу і видає основний сигнал як вихідний сигнал. Символ 132 перевіряє переважання або рівність між значенням та основним сигналом і видає основний сигнал як вихідний сигнал. Символ 134 перевіряє різницю між основним сигналом та значенням і видає основний сигнал як вихідний сигнал. Символ 136 складає два вхідних сигнали і видає відповідний вихідний сигнал. Символ 138 перемножує два вхідних сигнали і видає відповідний вихідний сигнал. Символ 142 ділить два вхідних сигнали видає відповідний вихідний сигнал. Для позначення логічних схем можуть також застосовуватися літерні умовні позначення, наприклад, MOVE, яке означає команду на переміщення інформації з одного запам'ятовуючого пристрою в інший запам'ятовуючий пристрій. Схеми виконані у вигляді різних стовпців, що дозволяють наочно представити входи ЕА автоматичного вимикача, виходи SA автоматичного вимикача, вхідні команди ЕОР графічного інтерфейсу, які відповідають введенню даних оператором, вихідну інформацію IOР графічного інтерфейсу, які відповідають відображенню виходів логічних схем автоматичного вимикача, наприклад, шляхом виведення на монітор. Входи і виходи ЕА, SA, ЕОР та IOР представлені літерними позначеннями разом з ідентифікаційним номером. Такими позначеннями можуть бути: MW: ціле 16-бітове слово М: біт всередині схеми Е: вхід «Все або Нічого» MD: подвійне слово. Як правило, для проведення випробувань оператор повинен вибрати двигун серед запропонованих двигунів, ввести і підтвердити максимальний і мінімальний кути рукоятки і запустити випробувальний стенд. При цьому може виникнути перебій. Автоматичний вимикач містить спеціальні схеми для сигналів, що виявляють ці перебої. Наприклад, на Фіг.13-А та 13-В відповідно показані схеми виявлення перебоїв напруги на рівні плат 1 та 2 автоматичного вимикача. Відразу ж при виявленні перебою напруги на рівні плати 1 або, відповідно,2 активується вхід Е0.0 або, відповідно, Е0.1. Ці логічні схеми видають сигнал на виходи М153.0 та М153.1 автоматичного вимикача, що попереджає про поточні перебої. Інші логічні схеми забезпечують виявлення специфічних перебоїв автоматичного вимикача. Під час випробування, якщо виявляється перебій, виходи примусово переводяться на 0, і випробування переходить в режим перебою. На Фіг.11-А показане підтвердження виявлення перебою оператором, який вводить команду MW104. Інформація про підтвердження виявлення перебою відображається графічним інтерфейсом (MW104 та MW152), і вихід М4.0 автоматичного вимикача видає дозвіл і здійснює повторний запуск випробування. Блоки MOVE є командами на копіювання даних з одного запам'ятовуючого при 15 строю в інший запам'ятовуючий пристрій, в цьому випадку на виведення на екран монітора. На Фіг.11-В показане одержання мінімального кута рукоятки. Оператор вводить призначене для виконання значення мінімального кута рукоятки від 0° до 360° (команда MW108). Це значення повинне бути відмінним від 0 і об'єднується зі середнім значенням MW150, яке повинне бути відмінним від 256, для підтвердження значення максимального кута рукоятки. Сигнал напруги М4.1 на виході автоматичного вимикача відображає введення мінімального кута рукоятки. На Фіг.11-С показане одержання максимального кута рукоятки. Оператор вводить значення максимального кута рукоятки від 0° до 360° (команда MW106). Це значення повинне бути відмінним від 0 і об'єднується зі середнім значенням MW150, яке повинне бути відмінним від 256, для підтвердження значення максимального кута рукоятки. Сигнал напруги М4.2 на виході автоматичного вимикача відображає введення максимального кута рукоятки. На Фіг.12-А та 12-В показані логічні схеми, що забезпечують виведення на графічний інтерфейс значення MW106 максимального кута рукоятки і значення MW108 мінімального кута рукоятки після їх підтвердження, як показано на Фіг.11-В та 11-С. Значення 0 на вході блоків MOVE служать для ініціалізації. Кутовий хід рукоятки відповідає «закону рукоятки». Цей хід вибирає користувач, як було описано вище. На кожній з Фіг.14А-14Е показана логічна схема, що використовується для одного з п'яти двигунів, який може бути вибраний оператором за допомогою команди MW100. Вибір двигуна може бути здійснений тільки на зупиненому стенді: значення команди запуск/зупинка MW102 знаходиться на 0 в режимі зупинки і може бути змінено оператором шляхом відповідного введення. Команда MW100 може дорівнювати цілому числу від 1 до 5 для зазначення вибраного оператором двигуна, при цьому в прикладах, представлених на Фіг.14, двигуни пронумеровані від 1 до 5. Після вибору двигуна оператор може ввести мінімальне і максимальне значення кутового діапазону вибраного двигуна, при цьому кутовий діапазон знаходиться в межах від -360° до 360°. Такими командами є MD170 та MD174 для двигуна 1, MD180 та MD184 для двигуна 2, MD190 та MD194 для двигуна 3, MD200 та MD204 для двигуна 4, MD210 та MD214 для двигуна 5. Кутовий діапазон, пов'язаний з вибором двигуна, називають «законом керування двигуна» або «законом двигуна». Команда запуск/зупинку переходить на 1. При цьому активується логічна схема, для якої MW 100=1. На основі значень мінімального і максимального кута двигуна, вибраного в стані зупинки, автоматичний вимикач на виході збирає значення напруги MD158 та MD162, пов'язані зі значеннями мінімального і максимального кута вибраного двигуна. 88438 16 Значення напруги MD158 та MD162, які відповідають значенням мінімального і максимального кута вибраного двигуна, використовуються на входах автоматичного вимикача (Фіг.15-А та 15-В). Ці значення напруги копіюються в запам'ятовуючий пристрій блоком MOVE, що дозволяє набути значень напруги, які відповідають фіктивним значенням мінімального і максимального кутів MD110 та MD114 рукоятки для вибраного двигуна. Таким чином, змінюють кутовий діапазон рукоятки в залежності від вибраного двигуна і від пов'язаного з ним закону керування. Після запуску випробування, здійсненого після вибору двигуна і його параметрів, на Фіг.16 представлена функція автоматичного вимикача, що забезпечує виведення на монітор поточного заданого значення кутового положення рукоятки. На вході автоматичного вимикача одержують: значення PEW304, що відповідає значенню напруги, одержаному від потенціометра і пов'язаному з поточним значенням кута рукоятки; значення напруги М4.1, що відповідає значенню мінімального кута рукоятки, одержаному логічною схемою, показаною на Фіг.11-В; значення напруги М4.2, що відповідає значенню максимального кута рукоятки, одержаному логічною схемою, показаною на Фіг.11-С; значення MD110 та MD114, що відповідають фіктивним мінімальному і максимальному кутам рукоятки для вибраного двигуна, одержаним логічними схемами, показаними на Фіг.15-А та 15-В. Показана на Фіг.16 логічна схема автоматичного вимикача перетворює одержане від потенціометра значення напруги рукоятки PEW 304 в значення напруги MD154, яке відповідає поточному куту рукоятки. Це перетворення здійснюється на основі діапазону напруги потенціометра, значень напруги, що відповідають значенням реальних максимального і мінімального кутів рукоятки, значень напруги, які відповідають фіктивним значенням мінімального і максимального кутів MD110 та MD114 рукоятки для вибраного двигуна. На Фіг.17А-17С показані логічні схеми, що забезпечують обчислення заданого значення кута в градусах, а потім в радіанах. Фіг.17-А відповідає схемі ініціалізації перед обчисленням нового заданого значення кута. Вихід MD20 є напругою, що відображає значення в градусах. Як показано на Фіг.17-В логічна схема автоматичного вимикача на виході одержує: значення команди MW 102, яке повинне дорівнювати 1 (означає стан зупинки випробування); значення напруги, що відповідають значенням фіктивних мінімального і максимального кутів MD110 та MD114 рукоятки для вибраного двигуна; значення напруги, що відповідають значенням мінімального і максимального кутів MD158 та MD162 вибраних двигуни; значення напруги поточного кута рукоятки MD154. Логічна схема (Фіг.17-В) дозволяє набути на виході значення кута рукоятки VD20 в градусах. 17 Фіг.17-С ілюструє перетворення значення MD20 в кут D24 в радіанах шляхом помноження на p/180. Як було указано вище, автоматичний вимикач може видати на інтерфейс-перетворювач задане кутове значення, яке потім трансформується в два значення синуса і косинуса. Автоматичний вимикач може також видавати як вихідні значення синус і косинус заданого значення кута. На Фіг.18 показаний автоматичний вимикач, що видає на виході значення косинуса і синуса заданого кута рукоятки. Так, на Фіг.18-А задане значення кута рукоятки MD24 в радіанах надходить на вхід логічної схеми COS, яка трансформує це значення в значення MD30 косинуса цього кута на виході логічної схеми. На Фіг.18-В це значення MD30 надходить на вхід логічної схеми масштабування, при цьому значення 1 і -1 на вході відображають верхню і нижню межі вхідного сигналу. Значення М3.0 є бітом підтвердження, який також дорівнює 1, який служить для підтвердження звернення до логічної схеми FC106. Масштабоване значення косинуса MW36 надходить на вихід автоматичного вимикача, а вихід MW34 вказує на стан масштабування косинуса. На Фіг.18-С задане значення в радіанах MD24 кута рукоятки надходить на вхід логічної схеми SIN, яка перетворює це значення в значення MD40 синуса цього кута на виході логічної схеми. На Фіг.18-D це значення MD40 надходить на вхід масштабуючої логічної схеми, при цьому значення 1 і -1 відображають верхню і нижню межі вхідного сигналу. Значення М3.0 є бітом підтвердження, який також дорівнює 1, який служить для підтвердження звернення до логічної схеми FC106. Масштабоване значення синуса MW46 надходить на вихід автоматичного вимикача, а вихід MW44 вказує на стан масштабування синуса. На Фіг.19 показані масштабуючі логічні схеми для виходів кутових значень в градусах MD20 логічних схем, показаних на Фіг.17-А та 17-В. На основі вхідного сигналу MD20, що відображає задане кутове значення в градусах, логічна схема (Фіг.19-А) як верхня і нижня межі вхідного сигналу набуває значень напруги, відповідних мінімальному і максимальному кутам MD158 та MD162 вибраних двигуни (кутовий діапазон закону двигуна). Сигнал М3.1 на вході знаходиться на нулі. На основі цих вхідних даних логічна схема (Фіг.19-А) забезпечує копіювання заданого значення в кутовому діапазоні закону двигуна для системи збору даних ACQ, який називається виходом MW56, і просте копіювання заданого значення в кутовому діапазоні закону двигуна, який називається вихідним значенням MW54. 88438 18 На основі вхідного сигналу MD20, що відображає задане кутове значення в градусах, логічна схема (Фіг.19-В) як верхня і нижня межі вхідного сигналу набуває значень, наприклад, 140° та 40°. Сигнал М3.1 на вході як і раніше знаходиться на нулі. На основі цих вхідних даних логічна схема (Фіг.19-В) забезпечує копіювання заданого значення в кутовому діапазоні закону двигуна для системи збору даних ACQ, який називається виходом MW60, і просте копіювання заданого значення в кутовому діапазоні закону двигуна, який називається виходом MW58. На Фіг.20 показане привласнення аналоговим виходам автоматичного вимикача внутрішніх слів автоматичного вимикача. Фіг.20-А, 20-В та 20-С є надмірними для Фіг.20-Е, 20-F, 20-G, щоб виходи автоматичного вимикача були надмірними для інтерфейсу-перетворювача, показаного на Фіг.7. Якщо автоматичний вимикач на виході видає перший тригонометричний сигнал, то на основі вхідного сигналу MW46, що відображає синус заданого кута, схема (Фіг.20-А) видає вихідний сигнал PAW272 як перший вихід синуса заданого кута на інтерфейс-перетворювач. Показана на Фіг.20-Е схема є надмірною для схеми, показаної на Фіг.20А, і видає вихід PAW288 як другий вихід синуса заданого кута на інтерфейс-перетворювач. Якщо автоматичний вимикач на виході видає другий тригонометричний сигнал, то на основі вхідного сигналу MW36, що відображає косинус заданого кута, схема на Фіг.20-В видає вихідний сигнал PAW274 як перший вихід косинуса заданого кута на інтерфейс-перетворювач. Показана на Фіг.20-F схема є надмірною для схеми на Фіг.20-В і видає вихід PAW220 як другий вихід косинуса заданого кута на інтерфейс-перетворювач. Якщо на виході автомат видає лінійний сигнал, то показана на Фіг.20-С схема забезпечує видачу на виході копії команди двигуна в масштабі закону двигуна для системи збору даних ACQ на основі вхідного сигналу MW56 (Фіг.19-А), який відповідає заданому куту, переведеному в масштаб закону двигуна. Показана на Фіг.20-G логічна схема забезпечує видачу на виході копії команди двигуна в масштабі [40°, 140°] для системи збору даних ACQ на основі вхідного сигналу MW56 (Фіг.19-В), який відповідає масштабованому заданому куту. Показана на Фіг.20-D логічна схема забезпечує видачу на блок 41 (сервопосилювач потужності) (Фіг.3) сигналів напруги PAW278 та PAW294. Сигнал PAW278 відповідає сигналу напруги потенціометра рукоятки PEW304, а сигнал PAW294 відповідає половині сигналу PEW304 напруги потенціометра рукоятки. Даний винахід не обмежується описаними вище варіантами його виконання, наведеними виключно як приклади, і може включати в себе інші варіанти, які можуть розглядатися фахівцями. 19 88438 20 21 88438 22 23 88438 24 25 88438 26 27 88438 28 29 88438 30 31 Комп’ютерна верстка О. Гапоненко 88438 Підписне 32 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюThrottle control device in particular for turbine aero engine test bench
Автори англійськоюVERNIAU JEAN-LUC
Назва патенту російськоюУстройство для управления газами, в частности для испытательного стенда газотурбинного двигателя
Автори російськоюВернио Жан-Люк
МПК / Мітки
Мітки: пристрій, двигуна, газами,зокрема, стенда, випробувального, керування, газотурбінного
Код посилання
<a href="https://ua.patents.su/16-88438-pristrijj-dlya-keruvannya-gazamizokrema-dlya-viprobuvalnogo-stenda-gazoturbinnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування газами,зокрема для випробувального стенда газотурбінного двигуна</a>
Пристрій для автоматичного керування подачею палива в камеру згоряння газотурбінного двигуна
Номер патенту: 38431
Опубліковано: 15.03.2004
Автори: Павлюк Євген Вікторович, Кравченко Юрій Гнатович, Мокроуз Василь Климентьйович, Горбатюк Микола Васильович
МПК: F02C 9/26
Мітки: керування, пристрій, двигуна, згоряння, газотурбінного, камеру, подачею, автоматичного, палива
Формула / Реферат:
Пристрій для автоматичного керування подачею палива в газотурбінний двигун, що включає вхідну, вихідну і дренажну магістралі, запірний кран у вигляді підпружиненого поршня з командною порожниною, вузол керування у вигляді підпружиненого сервопоршня із штоком і зв’язаними з ним клапанами підключення командної порожнини запірного крана до вхідної і дренажної магістралей, порожниною керування і двома електромагнітними клапанами включення і...
Система керування та контролю параметрів газотурбінного двигуна
Номер патенту: 22952
Опубліковано: 15.11.2001
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: двигуна, контролю, система, газотурбінного, керування, параметрів
Формула / Реферат:
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, який з'єднано з блоком керування переладнанням блоком формування відмови, блоком n –входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднано з блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, першим блоком елементів "І" та елементом...
Пристрій для зниження шуму реактивного струменя газотурбінного двигуна та сопло газотурбінного двигуна (варіанти)
Номер патенту: 83992
Опубліковано: 10.09.2008
Автори: Мірудо Фредерік, Пруто Жакі
МПК: F02K 1/48, F02K 1/38, F02K 1/00
Мітки: зниження, струменя, газотурбінного, варіанти, пристрій, реактивного, шуму, сопло, двигуна
Формула / Реферат:
1. Пристрій для зниження шуму реактивного струменя газотурбінного двигуна, що має подовжню вісь (Х-Х) і має сопло (10), по суті, циліндричної форми, яке розташоване вздовж зазначеної подовжньої осі газотурбінного двигуна і має задній край, що служить для змішування газових потоків, один з яких є внутрішнім, а другий зовнішнім відносно сопла, причому пристрій містить хвилеподібні виступи (26), розташовані на продовженні заднього краю сопла...
Система автоматичного керування, контролю та реєстрації параметрів газотурбінного двигуна
Номер патенту: 84209
Опубліковано: 25.09.2008
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G06F 15/16, F02C 9/28
Мітки: реєстрації, двигуна, параметрів, автоматичного, контролю, система, керування, газотурбінного
Формула / Реферат:
Система автоматичного керування, контролю та реєстрації параметрів газотурбінного двигуна, яка містить перший блок перетворення сигналів та контролю датчиків, з’єднаний з блоком нормалізаторів та першим блоком формувачів, другий блок перетворення сигналів та контролю датчиків, з’єднаний з блоком нормалізаторів та другим блоком формувачів, крім того, перший та другий блок перетворення сигналів та контролю датчиків, перший та другий блок...
Система керування та контролю параметрів газотурбінного двигуна
Номер патенту: 78342
Опубліковано: 15.03.2007
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: контролю, керування, газотурбінного, параметрів, система, двигуна
Формула / Реферат:
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, з'єднаний з блоком змінення рівня переналагодження, блоком формування відмови, блоком запуску, блоком сигналів дозволу, блоком n-входових елементів І, вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднаний з блоком сигналів дозволу, вихід блока сигналізаторів через блок контролю з'єднаний з блоком...
Попередній патент: Процес ферментації за участю генетично модифікованих дріжджів та спосіб здійснення ферментації
Наступний патент: Ущільнювальний елемент для роторної машини та роторна машина
Випадковий патент: Натрієва лампа високого тиску