Система керування та контролю параметрів газотурбінного двигуна

Формула / Реферат
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, з'єднаний з блоком змінення рівня переналагодження, блоком формування відмови, блоком запуску, блоком сигналів дозволу, блоком n-входових елементів І, вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднаний з блоком сигналів дозволу, вихід блока сигналізаторів через блок контролю з'єднаний з блоком сигналізаторів, першим блоком елементів І та елементом АБО, вихід якого з'єднаний з лічильником та елементом І, другий вхід якого з'єднаний з виходом лічильника, а другий та третій входи лічильника безпосередньо та через елемент НІ з'єднані з програмним блоком, виходиякого через блок змінення рівня переналагодження з'єднані з блоком сигналізаторів, а третій вхід блока сигналізаторів є першим входом системи, вихід блока змінення рівня переналагодження з'єднаний з першим блоком елементів І, останній вхід якого з'єднаний з виходом елемента НІ і одним з входів блока зв'язку з виконавчими елементами, вихід першого блока елементів І через блок формування відмови з'єднаний з блоком n-входових елементів І та елементом АБО, решта входів якого з'єднана з виходами блока контролю датчика та блока відмови обертів, який по тому ж ланцюгу з'єднаний з входом другого блока елементів І, другий вхідний ланцюг системи з'єднаний з входом блока контролю датчика та блока вимірювання обертів, виходи якого з'єднані з блоком відмови обертів, другим блоком елементів І та програмним блоком, вихід якого через задатчик контрольної частоти з'єднаний з блоком вимірювання обертів, решта входів якого з'єднана з блоком контролю датчика та програмним блоком, решта виходів якого з'єднана з блоком n-входових елементів І, блоком формування відмови, блоком відмови обертів, блоком сигналів дозволу, блоком зв'язку з виконавчими елементами, останні входи якого з'єднаний з виходом другого блока елементів І та елемента І, вихід блока зв'язку з виконавчими елементами є виходом системи, вихід блока сигналізаторів через комутатор з'єднаний з аналого-цифровим перетворювачем, вихід блока сигналів дозволу через блок запуску з'єднаний з другим входом програмного блока, другий вихід блока сигналів дозволу з'єднаний з останнім входом блока n-входових елементів І, яка відрізняється тим, що в систему додатково введені другий комутатор, блок цифро-аналогового перетворювача та блок обчислювача, виходи якого з'єднані блоком цифро-аналогового перетворювача, блоком зв'язку з виконавчими елементами, першим та другим комутатором, входи блока обчислювача з'єднані з аналого-цифровим перетворювачем, блоком вимірювання обертів та останніми входами системи, блок сигналізаторів та блок цифро-аналогового перетворювача з'єднані з другим комутатором, вихід якого з'єднаний з другим виходом системи.
Текст
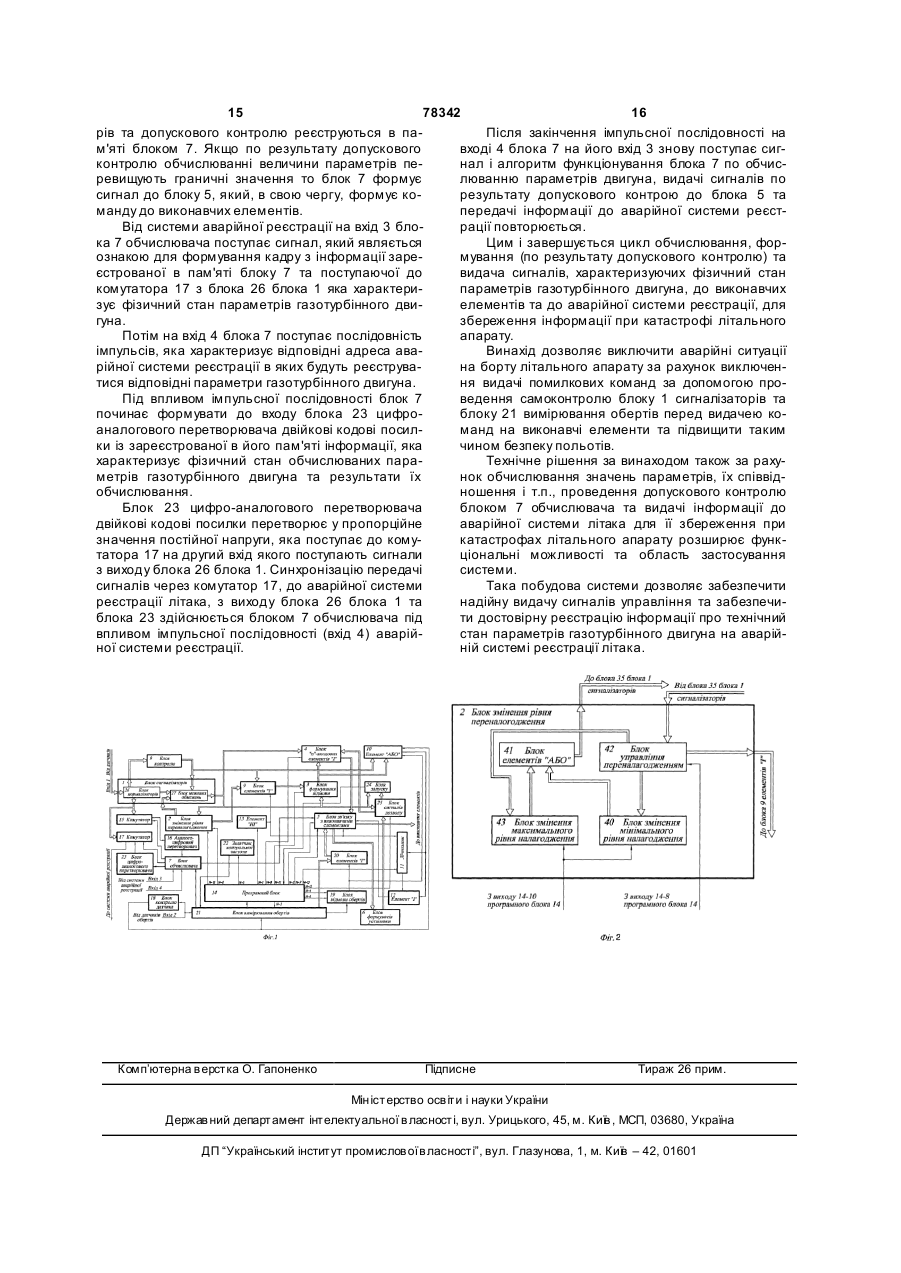
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, з'єднаний з блоком змінення рівня переналагодження, блоком формування відмови, блоком запуску, блоком сигналів дозволу, блоком nвходови х елементів І, вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднаний з блоком сигналів дозволу, вихід блока сигналізаторів через блок контролю з'єднаний з блоком сигналізаторів, першим блоком елементів І та елементом АБО, ви хід якого з'єднаний з лічильником та елементом І, другий вхід якого з'єднаний з виходом лічильника, а другий та третій входи лічильника безпосередньо та через елемент НІ з'єднані з програмним блоком, виходи якого через блок змінення рівня переналагодження з'єднані з блоком сигналізаторів, а третій вхід блока сигналізаторів є першим входом системи, вихід блока змінення рівня переналагодження з'єднаний з першим блоком елементів І, останній вхід якого з'єднаний з виходом елемента НІ і одним з входів блока зв'язку з виконавчими елементами, вихід першого блока елементів І через блок формування відмови з'єднаний з блоком nвходови х елементів І та елементом АБО, решта входів якого з'єднана з виходами блока контролю датчика та блока відмови обертів, який по тому ж C2 2 (11) 1 3 78342 4 "Система управління та контролю параметрів тролю датчика та програмним блоком, решта вигазотурбінного двигуна" [див. патент України ходів якого з'єднана з блоком "n"-входових елеме№38854, кл. F02C9/28], яка містить блок сигналінтів "І", блоком формування відмови, другим заторів, блок управління переналагодженням, блоком елементів "І", блоком відмови обертів, блок формування відмови, блок "n"-входових елеблоком сигналів дозволу, блоком зв'язку з викоментів "І" , блок зв'язку з виконавчими елементанавчими елементами, останній вхід якого з'єднами, блок формувачів установки, блок сигналів доний з виходом другого блока елементів "l", др угий зволу, блок контролю, перший блок елементів "І", вихід блока зв'язку з виконавчими елементами є елемент "АБО", лічильник, елемент "І", елемент виходами системи, а третій вхід блока сигналіза"НЄ", програмний блок, блок змінення мінімальноторів є другим входом системи, блока сигналізатого рівня налагодження, блок змінення максимальрів через комутатор з'єднаний з аналогоного рівня налагодження, блок елементів "АБО", цифровим перетворювачем, вихід блока сигналів блок контролю датчика, блок відмови обертів, друдозволу через блок запуску з'єднаний з другим гий блок елементів "І", блок вимірювання обертів, входом програмного блока, другий ви хід блока задатчик контрольної частоти, комутатор, аналогосигналів дозволу з'єднаний з останнім входом блоцифровий перетворювач, блок запуску, блок сигка "n"-входових елементів "І". налів дозволу. Вказана система має наступні недоліки: Вищезазначені системи не забезпечують об- не забезпечує безперервне обчислювання числювання, формування та видачу сигналів, хашвидкості (тенденції) змінення параметрів, співрактеризуючих фізичний стан параметрів газотурвідношень параметрів в залежності від режиму бінного двигуна до системи аварійної реєстрації та роботи двигуна, наприклад, співвідношення тиску команд управління до виконавчих елементів. повітря за турбіною високого тиску та тиску повітря Найближчою за технічною суттю та досягаєв порожнині за лабіринтом турбіни високого тиску мому ефекту по відношенню до даного технічного в залежності від обертів двигуна та видачу сигналу рішення є відома "Система керування та контролю на виконавчі елементи при виході результату співпараметрів газотурбінного двигуна" [див. патент відношення величин тиску за граничні межі. НеобУкраїни №22952, кл. F02C9/28], яка містить в собі хідність обчислювання співвідношення пов'язано з блок сигналізаторів з'єднаний з блоком змінення тим, що при виходу результату співвідношення рівня переналагодження (блок керування перелавеличин тиску повітря за граничні межі призводить днання, елемент "АБО", блок змінення максимадо значних механічних навантажень на турбіну льного рівня налагодження, блок змінення мінімадвигуна, що, в свою чергу, призводить до руйнульного рівня налагодження), блоком формування вання двигуна і як наслідок може призвести до відмови, блоком запуску, блоком сигналів дозволу, катастрофи літального апарата; блоком "n"-входови х елементів "І", ви хід якого че- не забезпечує формування та видачу як порез блок зв'язку з виконавчими елементами та точних значень параметрів двигуна так і результаблок формувачів установки з'єднаний з блоком ту обчислювання тенденції змінення параметрів, сигналів дозволу, ви хід блока сигналізаторів через співвідношень параметрів в залежності від режиму блок контролю з'єднаний з входом блока сигналіроботи двигуна до аварійної системи реєстрації; заторів, першим блоком елементів "І" та елемен- обмежені функціональні можливості та гатом "АБО", вихід якого з'єднаний з лічильником та лузь застосування системи внаслідок вищезазнаелементом "l", другий вхід якого з'єднаний з вихочених недоліків. дом лічильника, а другий та третій входи лічильниКрім того така побудова системи не дозволяє ка безпосередньо та через елемент "НІ" з'єднані з забезпечити реєстрацию на аварійній системі репрограмним блоком, виходи якого через блок змієстрації інформації про технічний стан параметрів нення рівня переналагодження (блок керування газотурбінного двигуна їх змінення в поточному переладнання, блок елементів "АБО", блок змічасу і як наслідок не забезпечує надійне зберенення максимального рівня налагодження, блок ження інформації при катастрофі літального апазмінення мінімального рівня налагодження), з'єдрата. нані з блоком сигналізаторів, другий вихід блока У разі удосконалення системи розширюються змінення рівня переналагодження з'єднаний з пеїї функціональні можливості та галузь застосуванршим блоком елементів "І", останній вхід якого ня, підвищуються експлуатаційні характеристики з'єднаний з виходом елемента "НІ" і одним з вхосистеми, підвищується достовірність реєстрації дів блока зв'язку з виконавчими елементами, вихід інформації про стан параметрів та забезпечується блока елементів "І" через блок формування відмовидача достовірної інформації про стан параметви з'єднаний з блоком "n"-входових елементів "l" рів газотурбінного двигуна до системи аварійної та елементом "АБО", решта входів якого з'єднана реєстрації. з виходами блока контролю датчика, блока відмоЗадачею винаходу є разширення функціонави обертів, який по тому ж ланцюгу з'єднаний з льних можливостей, галузі застосування системи входом другого блока елементів "І", вхідний ланта забезпечення видачі достовірної інформації про цюг системи, від датчика обертів, з'єднаний з вхостан параметрів газотурбінного двигуна та резульдом блока контролю датчика та блока вимірювантатів їх обчислювання до аварійної системи реєстня обертів, виходи якого з'єднані з другим блоком рації. елементів "І", блоком відмови обертів та з програВизначена задача досягається тим, що в відомним блоком, вихід якого через задатчик контрому систему що має блок сигналізаторів з'єднаний з льної частоти з'єднаний з блоком вимірювання блоком змінення рівня переналагодження, блоком обертів, решта входів якого з'єднана з блоком конформування відмови, блоком запуску, блоком сиг 5 78342 6 налів дозволу, блоком "n"-входови х елементів "l", обертів двигуна та видачу сигналу на виконавчі вихід якого через блок зв'язку з виконавчими елеелементи при виході результату співвідношення ментами та блок формувачів установки з'єднаний величин тиску за граничні межі. Необхідність обз блоком сигналів дозволу, вихід блока сигналізачислювання, наприклад, співвідношення пов'язано торів через блок контролю з'єднаний з блоком сигз тим, що при виходу результату співвідношення налізаторів, першим блоком елементів "І" та елевеличин тиску повітря за граничні межі призводить ментом "АБО", ви хід якого з'єднаний з лічильником до значних механічних навантажень на турбіни та елементом "l", другий вхід якого з'єднаний з двигуна, що, в свою чергу, призводить до руйнувиходом лічильника, а другий та третій входи лівання двигуна і як наслідок може призвести до чильника безпосередньо та через елемент "НІ" катастрофи літального апарата; з'єднані з програмним блоком, виходи якого через - формування та видачу як поточних значень блок змінення рівня переналагодження з'єднані з параметрів двигуна так і результату обчислювання блоком сигналізаторів, а третій вхід блока сигналітенденції змінення параметрів, співвідношень пазаторів є першим входом системи, вихід блока раметрів в залежності від режиму роботи двигуна змінення рівня переналагодження з'єднаний з педо аварійної системи реєстрації; ршим блоком елементів "l", останній вхід якого - розширення функціональних можливостей та з'єднаний з виходом елемента "НІ" і одним з вхогалузі застосування системи. дів блока зв'язку з виконавчими елементами, вихід Крім того, така побудова системи дозволяє першого блока елементів "І" через блок формузабезпечити формування та передачу формації вання відмови з'єднаний з блоком "n"-входових про технічний стан параметрів газотурбінного двиелементів "l" та елементом "АБО", решта входів гуна, їх змінення в поточному часу до аварійної якого з'єднана з виходами блока контролю датчика системи реєстрацій, що забезпечує надійне збета блока відмови обертів, який по тому ж ланцюгу реження інформації при катастрофі літального з'єднаний з входом другого блока елементів "І", апарата. другий вхідний ланцюг системи з'єднаний з входом Як бачимо з вищевказанного, запропоноване блока контролю датчика та блока вимірювання технічне рішення має суттєві ознаки, що дозволяє обертів, виходи якого з'єднані з блоком відмови розширити функціональні можливості, область обертів, другим блоком елементів "l" та програмзастосування системи та забезпечити формування ним блоком, вихід якого через задатчик контрольта передачу для реєстрації формації про технічний ної частоти з'єднаний з блоком вимірювання оберстан параметрів газотурбінного двигуна, їх змінентів, решта входів якого з'єднана з блоком ня в поточному часу до аварійної системи реєстконтролю датчика та програмним блоком, решта рацій, що забезпечує надійне збереження інфорвиходів якого з'єднана з блоком "n"-входови х елемації при катастрофі літального апарата та ментів "І", блоком формування відмови, блоком формування команд до виконавчих елементів. відмови обертів, блоком сигналів дозволу, блоком Принцип роботи системи пояснюється кресзв'язку з виконавчими елементами, останні входи леннями де: на Фіг.1 показана структурна схема якого з'єднані з виходом другого блока елементів системи; на Фіг.2 - структурна схема блока змінен"І" та елемента "l", ви хід блока зв'язку з виконавня рівня переналагодження. чими елементами є виходом системи, вихід блока Система містить блок 1 сигналізаторів, блок 2 сигналізаторів через комутатор з'єднаний з аналозмінення рівня переналагодження, блок 3 формуго-цифровим перетворювачем, вихід блока сигнавання відмови, блок 4 "n"-входових елементів "І", лів дозволу через блок запуску з'єднаний з другим блок 5 зв'язку з виконавчими елементами, блок 6 входом програмного блока, другий ви хід блока формувачів установки, блок 7 обчислювача, блок сигналів дозволу з'єднаний з останнім входом бло8 контролю, перший блок 9 елементів "І", елемент ка "n"-входових елементів "І", додатково введені 10 "АБО", лічильник 11, елемент 12 "l", елемент 13 другий комутатор, блок цифро-аналогового пере"НІ", програмний блок 14, перший комутатор 15, творювача та блок обчислювача, ви ходи якого аналого-цифровий перетворювач 16, другий комуз'єднані блоком цифро-аналогового перетворювататор 17, блок 18 контролю датчика, блок 19 відча, блоком зв'язку з виконавчими елементами, мови обертів, другий блок 20 елементів "І", блок 21 першим та другим комутатором, входи блока обвимірювання обертів, задатчик 22 контрольної числювача з'єднані з аналого-цифровим перетвочастоти, блок 23 цифро-аналогового перетворюрювачем, блоком вимірювання обертів та останнівача, блок 24 запуску, блок 25 сигналів дозволу. ми входами системи, блок сигналізаторів та блок Блок 1 сигналізаторів містить блок 26 нормаліцифро-аналогового перетворювача з'єднані з друзаторів та блок 27 межових обмежень. гим комутатором, вихід якого з'єднаний з другим Блок 1 сигналізаторів першим виходом з'єднавиходом системи. ний з блоком 2 змінення рівня переналагодження, Введення в систему додаткових ознак, а саме: блоком 3 формування відмови, блоком 24 запуску, другого комутатора, блока цифро-аналогового блоком 25 сигналів дозволу та блоком 4 "n"перетворювача та блока обчислювача дозволяє входови х елементів "І", вихід якого через блок 5 забезпечити: зв'язку з виконавчими елементами та блок 6 фор- безперервне обчислювання швидкості (тенмувачів установки з'єднаний з блоком 25 сигналів денції) змінення параметрів, співвідношень парадозволу, вихід блока 1 сигналізаторів через блоку метрів в залежності від режиму роботи двигуна, 8 контролю з'єднаний з блоком 1 сигналізаторів, наприклад, співвідношення тиску повітря за турбіблоком 9 елементів "І" та елементом 10 "АБО", ною високого тиску та тиску повітря в порожнині за вихід якого з'єднаний з лічильником 11 та елеменлабіринтом турбіни високого тиску в залежності від том 12 "І", другий вхід якого з'єднаний з виходом 7 78342 8 лічильника 11, другий та третій входи лічильника програмним блоком 14 та блоком 27 блока 1 сиг11 безпосередньо та через елемент 13 "НІ" з'єдналізаторів. нані з програмним блоком 14, виходи якого через Задатчик 22 контрольної частоти може бути блок 2 змінення рівня переналагодження з'єднавиповнений на базі генераторів синусоїдальних ний з блоком 1 сигналізаторів та блоком 9 елеменколивань. тів "І", останній вхід якого з'єднаний з виходом Блок 24 запуску може бути показаний як набір елемента 13 "НІ" та з одним входом блока 5 зв'язелементів "І" та генератора тактових імпульсів чи ку з виконавчими елементами, вихід блоку 9 елеформувачами імпульсів, які виповнюються на мікментів "І" через блок 3 формування відмови з'єдросхемі одновібратора. наний з блоком 4 "n"-входових елементів "І" та Блок 25 сигналів дозволу поданий, наприклад, елементом 10 "АБО", решта входів якого з'єднана як набір лічильних тригерів. з виходами блоку 18 контролю датчика та блоку 19 Блок 6 формувачів установки може бути виповідмови обертів, який по тому ж ланцюгу з'єднаний внений на базі мікросхем формувачів та одновібз входом другого блоку 20 елементів "І", вхідний раторів. ланцюг системи, від датчика обертів, з'єднаний з Блок 19 відмови обертів може бути виповневходом блоку 18 контролю датчика та блоку 21 ний, наприклад, на базі лічильного тригеру. вимірювання обертів, виходи якого з'єднані з блоКількість елементів "І" в блоці 20 відповідають ком 19 відмови обертів, блоком 20 елементів "І" та кількості вимірюваних рівней обертів газотурбінноз програмним блоком 14, вихід якого через задатго двигуна, а кількість формувачів в блоці 6 відпочик 22 контрольної частоти з'єднаний з блоком 21 відає кількості контрольованих параметрів блоком вимірювання обертів, решта входів якого з'єднана 1 сигналізаторів. з блоком 18 контролю датчика та програмним блоБлок 7 обчислювача може бути виповнений на ком 14, решта виходів якого з'єднана з блоком 4 стандартному мікропроцесорі з відповідною струк"n"-входових елементів "І", блоком 3 формування турою для забезпечення обчислювальних операвідмови, другим блоком 20 елементів "І", блоком цій. 19 відмови обертів, блоком 25 сигналів дозволу та Комутатор 15 та 17, аналого-цифровий переблоком 5 зв'язку з виконавчими елементами, творювач 16 та блок 27 23 цифро-аналогового останні входи якого з'єднані з виходом елемента перетворювача можуть бути виповнені на станда12 "І" та другого блоку 20 елементів "І", другий ртних мікросхемах. вихід блоку 5 зв'язку з виконавчими елементами є Програмний блок 14 може працювати автомавиходами системи, а третій вхід блоку 1 сигналізатично за сигналами запуску з блоків 24 запуску та торів з'єднаний входом системи, вихід блока 1 21 вимірювання обертів при працюючому двигуні, сигналізаторів з'єднаний з комутаторами 15 та 17, так і за командами запиту автоматизованої систевихід блока 7 обчислювача через комутатор 15 та ми контролю (АСК) об'єкту чи пульта бротінжеаналого-цифровий перетворювач 16 з'єднаний з нера. своїм входом, другий ви хід блока 7 обчислювача Система працює наступним чином. через блок 23 цифро-аналогового перетворювача При ввімкненні напруги живлення система з'єднаний з комутатором 17, вхід якого з'єднаний з встановлюється в початковий стан, після чого бловиходом блока 7 обчислювача, останній вихід якоки 1, 7 та 21 починають функціонувати по завдаго з'єднаний з блоком 5 зв'язку з виконавчими ному алгоритму. Сигнали з програмного блоку 14 елементами, останні входи блока 7 обчислювача не видаються за виключенням сигналів, дозволяз'єднані з блоком 21 вимірювання обертів та вхоючих проходження команд блоку 1 через блок 4 та дами системи, блок 25 сигналів дозволу через сигнала, який надходить на елемент 13 "НІ". На блок 24 запуску з'єднаний з останнім входом провиході елементу 13 "НІ" з'являється сигнал, який грамного блоку 14, станній вихід блоку 25 сигналів забороняє функціонування блоку 3 через елемендозволу з'єднаний з останнім входом блоку 4 "n"ти "І" блока 9, елементів пам'яті блока 5 зв'язку з входови х елементів "І", ви хід комутатора 17 з'єдвиконавчими елементами та лічильника 11. наний з другим виходом системи. Блок 25 сигналів дозволу видає сигнали на Блок 1 сигналізаторів містить блок 26 нормаліблок 24 запуску, які дозволяють запуск програмнозаторів, вхід якого з'єднаний з входом системи (від го блоку 14 при з'явленні на виході блоку 1 сигнадатчиків), а його вихід - з першим входом блоку 27 лів, що свідчать про досягнення параметрами двимежових обмежень блока 1, другий та третій входи гуна межових значень та сигнали на блок 4 "n"блоку 27 відповідно з'єднані з виходами блоку 8 та входови х елементів "І" які забороняють його ро28 блока 2 , вихід блоку 27 з'єднаний з блоками 2, боту. 3, 4, 24 та 25. Останні ви ходи блоку 26, з'єднані з При працюючому двигуні сигнали від датчиків блоком 8 та комутаторами 15 та 17. надходять до блоку 26 нормалізаторів блоку 1 Блок 2 змінення рівня переналагодження міссигналізаторів, де перетворюються в завданий тить блок 28 елементів "АБО" входи якого через рівень постійної напруги зручної як для аналогоблок 30 змінення максимального та блок 31 зміцифрового перетворювання, так і для використаннення мінімального рівня переналагодження з'єдня блоком 27 межових обмежень блоку 1 та блоку нані з програмним блоком 14, а вихід блока 28 8 контролю, функціонуючими за завданими алгоз'єднаний з входом блока 27 блока 1 сигналізаторитмами. Обмежувачі блоку 27 блоку 1 налагорів, виходи блока 29 управління переналагодженджуються на межові значення параметрів (як мініням з'єднанні з блоками 30 та 31 змінення максимальні так і максимальні) та видають команди як мального та мінімального рівня налагодження та при досягненні аварійних режимів роботи газотурблоком 9 елементів "І", входи блока 29 з'єднані з бінного двигуна, так і при досягненні завданих (не 9 78342 10 аварійних) режимів роботи для ввімкнення автоЗ інтервалом часу "Т" з моменту закінчення симатики двигуна. гналу 14-4 до блоку 19 з блоку 14 на задатчик 22 В процесі функціонування системи робиться контрольної частоти по ланцюгу 14-5 надходить як послідовна перевірка технічного стану блоку 21, сигнал що завдає режим його роботи, при якому а потім блоку 1 по запрошенням АСК або бортінна вхід блоку 21 надходить часто тний сигнал що женера так і автоматична при досягненні параметзнімає фіксацію усіх вимірюваних рівней обертів. рами газотурбінного двигуна межового (завданого) Під дією сигналу з задатчика 22 вимірюючий значення при його роботі. тракт блока 21 обробляє контрольний сигнал та Від датчика обертів (не показано) частотний знімає фіксацію усіх вимірюваних рівнів обертів, сигнал, пропорційний частоті обертів двигуна, що свідчить про справність вимірюючого тракту надходить до блоку 21, який обробляє його за заблоку 21. вданим алгоритмом. При порушенні ланцюгу датЯкщо блок 21 вимірювання обертів справний, чику обертів на виході блоку 18 з'являється сигто він не видає сигнал на блок 19 відмови обертів. нал, що забороняє видачу з блоку 21 сигналів При наявності несправностей в тракті блока 21 він завданих рівнів обертів та надходить через елевидає на блок 19 відмови обертів сигнал, який мент 10 "АБО" на вхід лічильника 11, де реєструзабезпечить фіксацію відмови при надходженні ється при роботі програмного блоку 14. сигналів з блоку 14. При досягненні завданого рівня обертів, при З інтервалом часу, визначеним швидкодією відсутності порушення ланцюгу датчика, блок 21 тракту вимірювання обертів блока 21, до входу видає сигнал на запуск програмного блоку 14. Пісблоку 19 по ланцюгу 14-6 видається сигнал. Якщо ля отримання сигналу запуску з блоку 21 програмпорушення у функціонуванні тракту вимірювання ний блок 14 по ланцюгу 14-1 знімає сигнал з елеобертів відсутнє, то в блоці 19 відмова не фіксумента 13 "НІ", внаслідок чого на виході останнього ється. Якщо є порушення у функціонуванні тракту з'являється сигнал, що дозволяє функціонування вимірювання обертів, то в блоці 19 фіксується віделементів пам'яті - тригерів блоку 5 зв'язку з викомова. Сигнал відмови з блоку 19 надходить до навчими елементами, а також блоку 9 елементів блоку 20 елементів "І" та забороняє проходження "І" та лічильника 11. Далі програмний блок 14 вичерез них сигналів з блоку 21 по закінченні самодає по ланцюгу 14-2 сигнал до блоку 5 та фіксує за контролю. Після цього знімаються сигнали, які допомогою тригерів стан виходів блоку 21 вимірюнадходили по ланцюгам 14-3 та 14-5 з виходу бловання обертів. Якщо сигнал про досягнення заку 14 до блоку 21 та задатчик 22. При цьому привданого рівня обертів видає блок 21 через блок 20 пиняється надходження в вимірюючий тракт блоку елементів "І" він фіксується блоком 5 на час про21 сигналу з задатчика 22 контрольної частоти, ходження самоконтролю. Цим забезпечується який переходить в початковий стан, а в вимірююбезперервність видачі команд на виконавчі елечий тракт блоку 21 надходить сигнал з датчику менти на термін проведення самоконтролю блообертів газотурбінного двигуна. ку 21. Крім того з блоку 21 сигнал у вигляді прямокуДалі з завданим інтервалом часу "Т" після витних імпульсів, період слідування яких пропорційдачі сигналу на блок 5 програмний блок 14 видає ний кількості обертів газотурбінного двигуна, надпо ланцюгу 14-3 сигнал на блок 21 вимірювання ходить до блока 7 обчислювача. обертів, який забороняє проходження сигналу даПри зміненні режиму роботи газотурбінного тчика (не показаний) обертів та дозволяє проходвигуна оберти досягають наступного більш вищодження імпульсів задатчика 22 контрольної частого рівня, на виході блоку 21 з'являється сигнал, ти по тракту блока 21. Сигнал, який видається який запускає програмний блок 14. При цьому програмним блоком 14 на блок 21 по ланцюгу 14цикл проведення самоконтролю блоку 21, описа3, знімає також сигнал заборони, що надходить з ний вище, повторюється. блоку 18 у випадку порушення ланцюга датчика та Таким чином, на виконавчі елементи сигнали запобігає видачі команд з блоку 21 при проведенні про досягнення завданих рівней обертів надходять самоконтролю. Контрольна частота з задатчика 22 тільки після проходження самоконтролю, відсутнозабезпечує фіксацію усіх вимірюваних рівнів оберсті відмов в тракті вимірювання рівнів обертів блотів блоком 21. Якщо блок 21 вимірювання обертів ка 21 і тільки при повторному підтвердженні досягсправний, то він не видає сигнал на блок 19 відмонення завданого рівня обертів. Після завершення ви обертів. При наявності несправностей в тракті перевірки технічного стану блоку 21 вимірювання блока 21 він видає на блок 19 відмови обертів сигобертів може початися перевірка технічного стану нал, який забезпечить фіксацію відмови при надблоку 1 сигналізаторів. ходженні сигналів з блоку 14. Після завершення перевірки технічного стану З інтервалом часу, визначеним швидкодією блоку 21 вимірювання обертів (у випадку послідотракту вимірювання обертів блока 21, до входу вної перевірки) починається перевірка технічного блоку 19 по ланцюгу 14-4 видається сигнал. Якщо стану блоку 1 сигналізаторів. порушення у функціонуванні тракту вимірювання Перевірка технічного стану блоку 1 сигналізаобертів відсутнє, то в блоці 19 відмова не фіксуторів заключається в наступному. ється. Якщо є порушення у функціонуванні тракту Програмний блок 14 по ланцюгу 14-7 видає сивимірювання обертів, то в блоці 19 фіксується відгнал на вхід блоку 5 та фіксує в ньому за допомомова. Сигнал відмови з блоку 19 надходить до гою тригерів стан виходів блоку 1 сигналізаторів, блоку 20 елементів "І" та забороняє проходження якщо є дозволяючий сигнал з блоку 25 сигналів через них сигналів з блоку 21 по закінченні самодозволу на вході відповідного елементу "І" блоконтролю. ку 4. 11 78342 12 Якщо сигнал про досягнення відповідним паблоком 14 сигнала на лічильник 11 він знімає по раметром завданого значення видається блоком ланцюгу 14-10 команду переналагодження з блоків 27 блоку 1 через блок 4 елементів "І" та надходить 30 та 31 змінення максимального та мінімального дозволяючий сигнал з блоку 25 на вхід відповіднорівнів налагодження і канали блоку 27 блоку 1 пего елементу "І" блоку 4, то він фіксується блоком 5 реналагоджуються на завдані (робочі) рівні обмена час проходження самоконтролю. ження. Одночасно з видачею по ланцюгу 14-7 сигналу Так як сигнали з датчиків контрольованих падо блоку 5 програмний блок 14 по ланцюгу 14-8 раметрів будуть відповідати завданим рівням обвидає сигнал на блок 29 управління переналагомеження, то на ви ході блоку 1 сигналізаторів будженням блока 2, який фіксує вихідний стан блоку дуть видаватися сигнали, які надходять на входи 27 межових обмежень блоку 1 для забезпечення їх блоку 24 запуску, блоку 25 сигналів дозволу та переналагодження на видачу або зняття сигналів з блоку 4 "n"-входових елементів "І". З інтервалом виходів блоку 1 та для управління роботою блоку часу після зняття сигналу по ланцюгу 14-10 з бло3 формування відмови через блок 9 елементів "І". ку 14 по ланцюгу 14-13 видається сигнал, під дією Потім з програмного блоку 14 по ланцюгу 14-9 якого тригери блоку 25, на управляючих входах видається сигнал до блоку 4 та забороняє прохояких присутні сигнали досягнення параметрами дження команд з блоку 1 сигналізаторів до блоку 5 межових значень, змінюють свій початковий стан. зв'язку з виконавчими елементами. Наступна коПри цьому на відповідні входи блоку 24 запуску манда, яка надходить по ланцюгу 14-10 відповідно будуть надходити сигнали, які забороняють запуск до блоків 30 та 31 змінення максимального та міблоку 14, а на відповідні елементи "І" блоку 4 бунімального рівня налагодження, при наявності дуть надходити сигнали, які відповідають завдавідповідних сигналів з блоку 29 управління переним рівням обмеження параметрів, дозволяючи налагодженням, перелагоджує блок 27 блока 1 на проходження, через них, до блоку 5 та далі на вивидачу сигналів (якщо сигнали до цього часу не конавчі елементи. видавалися) або на їх зняття (якщо сигнали до Після цьго знімається забороняючий сигнал, цього часу видавалися). При цьому сигнали через який надходив по ланцюгу 14-9 блоку 14, та видаблок 4 "n"-входових елементів "І" не проходять ється сигнал, дозволяючий проходження сигналів внаслідок наявності на його вході забороняючого завданих рівнів обмеження параметрів через блок сигналу з програмного блоку 14. 4 "n"-входови х елементів "І" та далі через блок 5 Якщо переналагодження блоку 27 блока 1 на виконавчі елементи. проводиться відповідно до алгоритму самоконтроЗ вищевикладеного бачимо, що блок 25 сиглю, що визначається сигналами з виходу блоку 1, налів дозволу забезпечує видачу команд, завдаякі надходять безпосередньо, та сигналами, які них рівнів обмеження параметрів, на виконавчі надходять з виходу блоку 29 управління переналаелементи при досягненні завданих рівнів обмегодженням блока 2 через блок 9 елементів "І" до ження тільки після проведення контролю функціоблоку 3 формування відмови, то відмова в блоці 3, нування блоку 1 сигналізаторів. Цим виключається при надходженні наступної команди по ланцюгу помилкова видача сигналів на виконавчі елеме14-11 з програмного блоку 14, не фіксується. Блок нти. 9 елементів "І" призначений для управління робоЯкщо при зміненні режиму роботи газотурбінтою блоку 3 з метою підвищення його завадостійного двигуна значення параметру стало нижче кості. Якщо переналагодження одного з каналів рівня обмеження, то сигнал на вході блоку 5 зніблоку 27 межових обмежень блоку 1 внаслідок мається. Зняття сигнала завданого рівня обмепорушення ланцюгу його датчика відбувається не ження з виходу блоку 5 призводить до появлення відповідно до алгоритму контролю, то внаслідок дії на виході відповідного формувача блоку 6 сигназабороняючого сигналу з блоку 8 на вхід відповідла, який установлює відповідний тригер в блоці 25 ного елементу "І" блоку 9 в блоці 3 також не фіксусигналів дозволу в початковий стан, при якому на ється відмова по даному каналу. відповідний елемент блоку 4 буде надходити сигЯкщо хоча б один з каналів блоку 1 не видає нал, забороняючий проходження на виконавчий сигнал, (внаслідок переналагодження, а він повиелемент команд відповідних рівней обмеження нен був його видати), або не знімає сигнал хоча параметрів, а до блоку 24 - сигнал, дозволяючий він повинен був зняти його з виходу (при відсутнозапуск програмного блоку 14 при повторному дості порушення ланцюгу датчика), то по мірі надхосягненні раніш знятого сигналу завданого рівня дження сигналу з програмного блоку 14 в блоці 3 обмеження параметру. фіксується відмова. Сигнал відмови надходить на Таким чином, на виконавчі елементи сигнали вхід елементу "І" блоку 4, відповідно відмовившопро досягнення межових рівней обмеження параму каналу. Цим виключається помилкова видача метрів потрапляють тільки після проходження сасигналів на виконавчі елементи після проходження моконтролю, відсутності відмов в тракті блоку 1 самоконтролю. сигналізаторів і тільки при повторному підтверКрім того, сигнал відмови через елемент 10 дженні досягнення параметром свого межового "АБО" надходить на вхід лічильника 11 та фіксузначення. Останнім знімається сигнал, який надється в ньому при надходженні сигнала по ланцюходить з програмного блоку 14 на вхід елементу гу 14-12 з програмного блоку 14. При надходженні 13 "НІ" по ланцюгу 14-1 і програмний блок 14 устасигнала по ланцюгу 14-12 в лічильнику 11 фіксуновлюється в початковий стан. ється також відмова блоку 21 вимірювання обертів При порушенні ланцюга датчика одного з ката порушення ланцюгу датчика як сигналізаторів, налів блоку 27 блоку 1 або відмови одного з нортак і обертів. Одночасно з видачею програмним малізаторів блоку 26 блоку 1, який призводе до 13 78342 14 зникнення сигналу на його виході, що рівнозначно лів з блоку 25 сигналів дозволу, видає сигнал на аварійному стану газотурбінного двигуна, напризапуск програмного блоку 14. Після отримання клад, за мінімальним тиском масла в маслосистемі сигнала з блоку 24 програмний блок 14 по ланцюгу двигуна, або до збільшення сигналу на вході від14-1 знімає сигнал з елемента 13 "НІ", внаслідок повідного каналу блоку 27 блоку 1, що рівнозначно чого на його виході з'являється сигнал, що дозвотакож аварійному стану двигуна, наприклад, за ляє функціонування елементів пам'яті блоку 5 максимальною температурою масла в маслосисзв'язку з виконавчими елементами, блоку 9 елетемі двигуна, на ви ході блоку 8 з'явиться сигнал, ментів "І" та лічильника 11. який, впливаючи на відповідний канал блоку 27, в Далі програмний блок 14 видає по ланцюгу 14ланцюгу датчика якого або нормалізатора блоку 7 сигнал на блок 5 та фіксує за допомогою триге26 виникло порушення, забороняє видачу ним корів стан виходів блоку 1, якщо є дозволяючий сигманди на виконавчий елемент. нал на вході блоку 4 "n"-входових елементів "І", Сигнал про порушення ланцюгу датчика при який надходить з блоку 25 сигналів дозволу. відмові нормалізатора блоку 26 блоку 1 з вихода Якщо сигнал, який свідчить про досягнення блоку 8 потрапляє також на відповідний елемент параметром свого межового значення, видається "І" блоку 9 і, таким чином, забороняє формування блоком 1 через блок 4 елементів "І", за наявністю сигналу відмови по чинному каналу в блоці 3 при на його вході дозволяючого сигналу з блоку 25, то проходженні самоконтролю, так як порушується він фіксується блоком 5 на період проведення сарежим роботи сигналізатора при відмовах в ланмоконтролю. Цим забезпечується безперервність цюгу да тчику. Відмова відповідного нормалізатора видачі команд на виконавчі елементи на період блоку 26 блоку 1 буде виявлена за наслідками проведення самоконтролю блока 1. дешифр ування польотних даних зареєстрованих в Одночасно з видачею по ланцюгу 14-7 сигнала системі аварійної реєстрації після кожного польоту на блок 5 програмний блок 14 по ланцюгу 14-8 літального апарату. Крім того, сигнал про порувидає сигнал на блок 29 управління переналагошення ланцюга датчика або відмови нормалізатодженням блока 2 і цикл контролю функціонування ра блоку 26 блоку 1 через елемент 10 "АБО" надблоку 1 виконується за вищезазначеним алгоритходить на вхід лічильника 11 та фіксується в ньому мом. при проходженні самоконтролю. Обчислювання та видача сигналів, характериЯкщо короткочасне порушення ланцюга датзуючих фізичний стан параметрів газотурбінного чика виникло в період відсутності самоконтролю, двигуна, до аварійної системи реєстрації ( для на час більше ніж постійна часу нормалізаторів збереження інформації при катастрофі літального блоку 26 блоку 1, то буде тільки заборонена видаапарату), а також формування сигналів межових ча помилкової команди з виходу відповідного каобмежень до блока 5 проводиться в наступному налу блоку 27 блоку 1. Якщо видача команди випорядку. никає внаслідок відмови одного з каналів блоку 27 Як зазначено вище з ви ходу блока 21 вимірюблоку 1, то при проведенні самоконтролю фіксування обертів на вхід блока 7 обчислювача постується відмова відповідного каналу, а команда в пає послідовність прямокутних імпульсів, період цьому випадку на виконавчий елемент не видаслідування яких пропорційний числу обертів газоється. Якщо при проходженні кількох циклів конттурбінного двигуна. ролю, наприклад, трьох на виході блоку 3 зберігаУ наслідок подальшого функціонування блока ється сигнал відмови хоча б одного каналу блоку 7 обчислювача імпульсна послідовність, яка по27 блоку 1, при порушенні хоча б одного з контроступає з виходу блока 21, перетворюється у двійльованих ланцюгів датчиків або відмови хоча б ковий код, який фіксується в пам'яті блока 7. одного з каналів блоку 26 блоку 1, а також при Потім блок 7 обчислювача видає сигнали, напояві сигналу відмови на виході блоку 19 на виході приклад, у вигляді двійкового коду, на комутатор лічильника 11 видається сигнал стійкої відмови 15 для почергового підключення сигналів з виходу або порушення ланцюга датчика. При наявності блоку 26 нормалізаторів блоку 1, значення яких сигналу з виходу лічильника 11 та елементу 10 характеризують фізичний стан параметрів газоту"АБО" на виході елементу 12 "І" з'являється сигрбінного двигуна. У наслідок чого сигнал з виходу нал, який через блок 5 надходить в бортову сисблоку 26 блоку 1 через комутатор 15 надходить до тему відображення інформації. аналого-цифрового перетворювача 16, де переПри короткочасному, випадковому порушенні творюється в двійковий код. З інтервалом часу, ланцюга датчика в момент дії вібраційних наванвизначеним швидкодією перетворювача 16, після тажень або отриманні сигналу відмови сигналізавидачі на його вхід сигналу з виходу комутатора тора блоку 27 блоку 1, або блоку 21 вимірювання 15, блок обчислювача 7 реєструє в своїй пам'яті обертів від випадкового збою при функціонуванні двійковий код з виходу аналого-цифрового переабо проведенні самоконтролю наступний цикл творювача 16. По закінченню перетворювання всіх контролю не дає підтвердження вказаних відмов, необхідних для обчислювання аналогових сигналів внаслідок чого лічильник 11 обнулюється, тобто з виходу блоку 26 блоку 1, а також запису резульповертається до початкового стану. татів перетворювання в пам'ять блоку 7, останній Автоматичний режимконтролю функціонуванприпиняє видачу сигналів на комутатор 15 та поня тракту блоку 1 по сигналу запуску з блоку 24 чинає обчислювати співвідношення параметрів, визначається в наступному. При досягненні одним швидкість їх зростання і т.п. з урахуванням велиз параметрів свого межового значення блок 1 вичини обертів двигуна, а результати обчислювання дає сигнал на блок 24 запуску, який в зв'язку з нааналізувати, наприклад, по алгоритмам допусковоявністю на другому його вході дозволяючих сигнаго контролю. Результати обчислювання парамет 15 78342 16 рів та допускового контролю реєструються в паПісля закінчення імпульсної послідовності на м'яті блоком 7. Якщо по результату допускового вході 4 блока 7 на його вхід 3 знову поступає сигконтролю обчислюванні величини параметрів пенал і алгоритм функціонування блока 7 по обчисревищують граничні значення то блок 7 формує люванню параметрів двигуна, видачі сигналів по сигнал до блоку 5, який, в свою чергу, формує корезультату допускового контрою до блока 5 та манду до виконавчих елементів. передачі інформації до аварійної системи реєстВід системи аварійної реєстрації на вхід 3 блорації повторюється. ка 7 обчислювача поступає сигнал, який являється Цим і завершується цикл обчислювання, форознакою для формування кадру з інформації заремування (по результату допускового контролю) та єстрованої в пам'яті блоку 7 та поступаючої до видача сигналів, характеризуючих фізичний стан комутатора 17 з блока 26 блока 1 яка характерипараметрів газотурбінного двигуна, до виконавчих зує фізичний стан параметрів газотурбінного двиелементів та до аварійної системи реєстрації, для гуна. збереження інформації при катастрофі літального Потім на вхід 4 блока 7 поступає послідовність апарату. імпульсів, яка характеризує відповідні адреса аваВинахід дозволяє виключити аварійні ситуації рійної системи реєстрації в яких будуть реєструвана борту літального апарату за рахунок виключентися відповідні параметри газотурбінного двигуна. ня видачі помилкових команд за допомогою проПід впливом імпульсної послідовності блок 7 ведення самоконтролю блоку 1 сигналізаторів та починає формувати до входу блока 23 цифроблоку 21 вимірювання обертів перед видачею коаналогового перетворювача двійкові кодові посилманд на виконавчі елементи та підвищити таким ки із зареєстрованої в його пам'яті інформації, яка чином безпеку польотів. характеризує фізичний стан обчислюваних параТехнічне рішення за винаходом також за рахуметрів газотурбінного двигуна та результати їх нок обчислювання значень параметрів, їх співвідобчислювання. ношення і т.п., проведення допускового контролю Блок 23 цифро-аналогового перетворювача блоком 7 обчислювача та видачі інформації до двійкові кодові посилки перетворює у пропорційне аварійної системи літака для її збереження при значення постійної напруги, яка поступає до комукатастрофах літального апарату розширює функтатора 17 на другий вхід якого поступають сигнали ціональні можливості та область застосування з виходу блока 26 блока 1. Синхронізацію передачі системи. сигналів через комутатор 17, до аварійної системи Така побудова системи дозволяє забезпечити реєстрації літака, з виходу блока 26 блока 1 та надійну видачу сигналів управління та забезпечиблока 23 здійснюється блоком 7 обчислювача під ти достовірну реєстрацію інформації про технічний впливом імпульсної послідовності (вхід 4) аварійстан параметрів газотурбінного двигуна на аварійної системи реєстрації. ній системі реєстрації літака. Комп’ютерна в ерстка О. Гапоненко Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of control and monitoring of gas-turbine engine parameters
Автори англійськоюBezschastnyi Vasyl Oleksiiovych
Назва патенту російськоюСистема управления и контроля параметров газотурбинного двигателя
Автори російськоюБессчастный Василий Алексеевич
МПК / Мітки
МПК: F02C 9/28
Мітки: система, керування, газотурбінного, параметрів, двигуна, контролю
Код посилання
<a href="https://ua.patents.su/8-78342-sistema-keruvannya-ta-kontrolyu-parametriv-gazoturbinnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Система керування та контролю параметрів газотурбінного двигуна</a>
Система керування та контролю параметрів газотурбінного двигуна
Номер патенту: 22952
Опубліковано: 15.11.2001
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: параметрів, двигуна, контролю, газотурбінного, керування, система
Формула / Реферат:
Система керування та контролю параметрів газотурбінного двигуна, яка містить блок сигналізаторів, який з'єднано з блоком керування переладнанням блоком формування відмови, блоком n –входових елементів "І", вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднано з блоком сигналів дозволу, вихід блока контролю з'єднано з блоком сигналізаторів, першим блоком елементів "І" та елементом...
Система керування, контролю та реєстрації параметрів газотурбінного двигуна
Номер патенту: 76844
Опубліковано: 15.09.2006
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: система, реєстрації, керування, параметрів, контролю, двигуна, газотурбінного
Формула / Реферат:
Система керування, контролю та реєстрації параметрів газотурбінного двигуна, яка містить блок сигналізаторів, з'єднаний з блоком змінення рівня переналагодження, блоком формування відмови, блоком запуску, блоком сигналів дозволу, блоком n-входових елементів І, вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднаний з блоком сигналів дозволу, вихід блока сигналізаторів через блок контролю з'єднаний з...
Система автоматичного керування, контролю та реєстрації параметрів газотурбінного двигуна
Номер патенту: 76839
Опубліковано: 15.09.2006
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28, G06F 15/16
Мітки: газотурбінного, параметрів, двигуна, контролю, реєстрації, автоматичного, керування, система
Формула / Реферат:
Система автоматичного керування, контролю та реєстрації парметрів газотурбінного двигуна, яка містить перший блок формувачів по входу з'єднаний з першим блоком контролю датчиків та частоти та першим входом системи, а його вихід з'єднаний з першим блоком перетворення та аналізу та першим блоком контролю датчиків та частоти, вихід якого з'єднаний з першим блоком перетворення та аналізу, другий блок формувачів по входу з'єднаний з другим блоком...
Система автоматичного керування, контролю та реєстрації параметрів газотурбінного двигуна
Номер патенту: 51353
Опубліковано: 17.05.2004
Автори: БЕЗСЧАСТНИЙ Василь Олексійович, Безсчастний Микола Олексійович
МПК: F02C 9/28
Мітки: двигуна, контролю, керування, реєстрації, газотурбінного, автоматичного, параметрів, система
Формула / Реферат:
Система автоматичного керування, контролю та реєстрації параметрів газотурбінного двигуна, яка має послідовно з'єднані перший блок конденсаторів, перший блок формувачів, перший блок комутації частоти, другий вхід якого з'єднаний з першим блоком керованої еталонної частоти, третій вхід першого блока комутації частоти з'єднаний з виходом першого блока контролю датчиків, а вихід першого блока комутації частоти з'єднаний з першим операційним...
Система автоматичного керування, контролю та реєстрації параметрів газотурбінного двигуна
Номер патенту: 46494
Опубліковано: 17.05.2004
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: контролю, реєстрації, двигуна, газотурбінного, параметрів, автоматичного, керування, система
Формула / Реферат:
Система автоматичного керування, контролю та реєстрації параметрів газотурбінного двигуна, яка має комутатор, з'єднаний через аналого-цифровий перетворювач з першим операційним блоком, вхід блока узгодження, з'єднаний з аналоговим входом системи, а вихід - з другим комутатором та блоком контролю вхідних ланцюгів, вихід якого з'єднаний з першим операційним блоком та другим входом другого комутатора, вихід першого операційного блока підключений...