Сингулярний спосіб забезпечення безаварійного руху транспортного засобу в аварійних ситуаціях
Формула / Реферат
1. Сингулярний спосіб забезпечення найменшого травмування перешкоди, у тому числі пішохода, та пошкодження транспортного засобу (ТЗ) при їх зіткненні, що включає визначення місцеположення транспортного засобу, прийом інформації про дорожню обстановку, відображення на дисплеї ТЗ отриманої інформації з урахуванням дорожньої обстановки, при цьому на ТЗ для визначення його місцеположення встановлюють супутникову систему навігації і систему об'єктивного контролю керуючого ТЗ, а перед запуском двигуна ТЗ контролюють стан здоров'я керуючого ТЗ, шляхом вимірювання біометричних даних і визначення наявності алкоголю, і формують виконавчий сигнал в залежності від стану здоров'я керуючого ТЗ відносно включення двигуна, приймають інформацію про небезпечні гідрометеорологічні явища з гідрометеоцентрів і відображають її на дисплеї ТЗ разом з аналізом дорожньої обстановки, при цьому при неможливості запобігання зіткненню ТЗ з перешкодою, активують і подають сигнали керування на подушки безпеки ТЗ, а при перекиданні ТЗ за допомогою пристрою аналізу дорожньої обстановки формують сигнали керування і надувають подушки безпеки зі всіх сторін ТЗ, також контролюють дотримання правил дорожнього руху по дорожніх знаках керуючим ТЗ і у випадку їх грубого порушення дистанційно і примусово припарковують ТЗ - порушник до найближчого відповідного місця і заглушають двигун, для зменшення гальмівного шляху, у разі потреби, додатково відстрілюють гальмівні парашути, який відрізняється тим, що аналізують наявність перешкод, що знаходяться в зоні можливого зіткнення за допомогою датчиків тривимірного огляду простору різної фізичної природи, а саме радіолокаційних, оптичних, інфрачервоних, акустичних і так далі, встановлених на ТЗ, а при неможливості запобігання зіткнення ТЗ з перешкодою-пішоходом подають сигнали керування і активують нижні подушки безпеки ТЗ, які утворюють захисне і закрите з боків ложе, по якому перешкода-пішохід переміщається від лобової частини ТЗ, яку також захищають подушкою безпеки, а при спрацьовуванні датчика падіння перешкоди-пішохода - формують сигнали керування, при яких спрацьовують верхні подушки безпеки, які накривають нижні подушки безпеки з фіксацією верхніх подушок спеціальними клямками.
2. Спосіб за п. 1, який відрізняється тим, що додатково приймають точнішу навігаційну інформацію про місцеположення свого ТЗ і сусідніх ТЗ від системи місцевої навігації.
3. Спосіб за п. 1, який відрізняється тим, що при перевертанні ТЗ спрацьовує пристрій аналізу дорожньої обстановки і ухвалення рішення, що формує сигнали керування і надувають подушки безпеки зі всіх сторін ТЗ - зліва ззаду, справа ззаду, зверху, знизу, справа спереду і зліва спереду - ТЗ виявляється усередині порожнистого надутого захисного покриття, що огинає форму ТЗ, що захищається.
4. Спосіб за п. 1, який відрізняється тим, що при контролі дотримання правил дорожнього руху (ПДР) керуючим ТЗ, контролюють швидкість руху, дорожні розмітки, правила зупинки, стоянок, обгону ТЗ, переїзду перегонів інтервалів та дистанції руху, зустрічного роз'їзду.
Текст
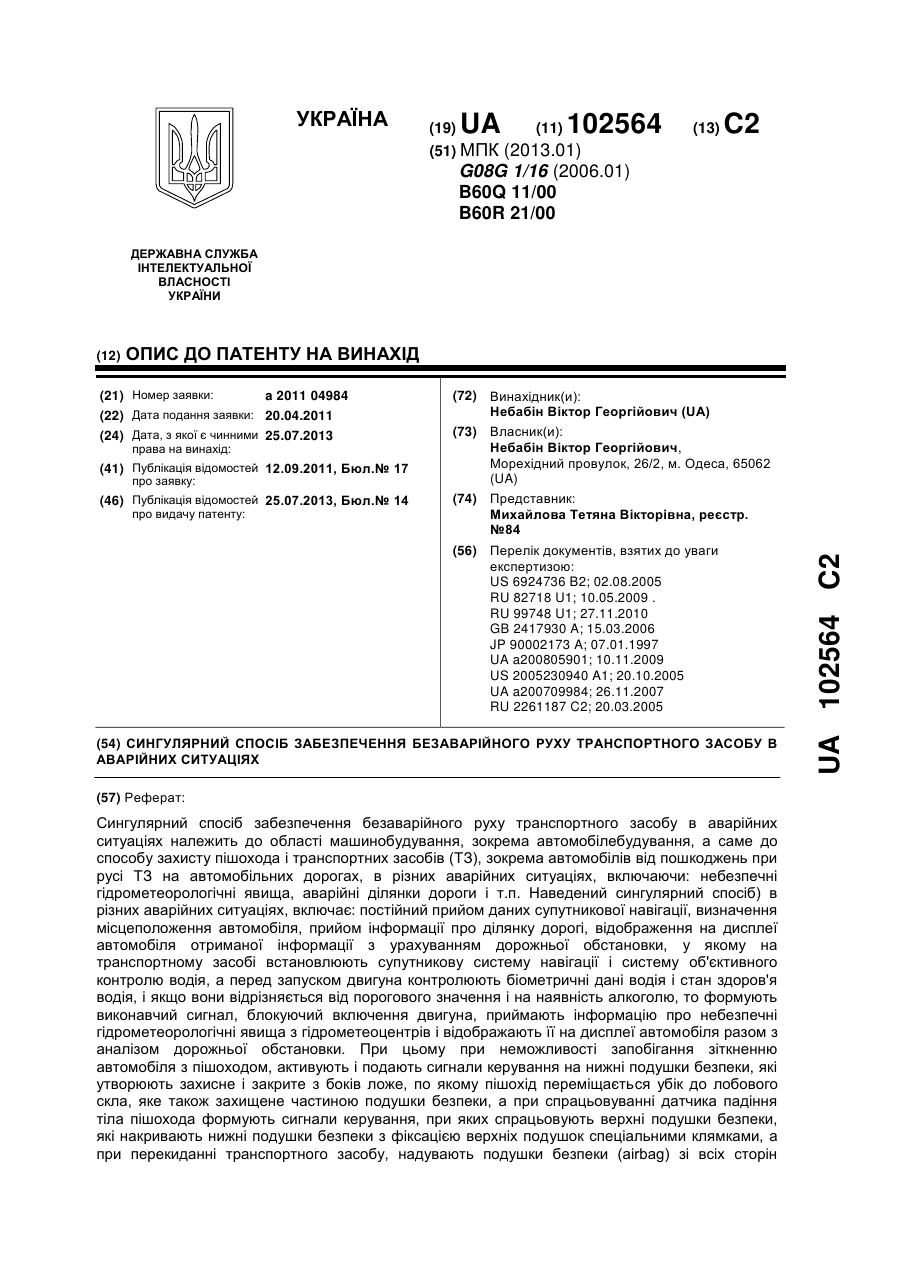
Реферат: Cингулярний спосіб забезпечення безаварійного руху транспортного засобу в аварійних ситуаціях належить до області машинобудування, зокрема автомобілебудування, а саме до способу захисту пішохода і транспортних засобів (ТЗ), зокрема автомобілів від пошкоджень при русі ТЗ на автомобільних дорогах, в різних аварійних ситуаціях, включаючи: небезпечні гідрометеорологічні явища, аварійні ділянки дороги і т.п. Наведений сингулярний спосіб) в різних аварійних ситуаціях, включає: постійний прийом даних супутникової навігації, визначення місцеположення автомобіля, прийом інформації про ділянку дорогі, відображення на дисплеї автомобіля отриманої інформації з урахуванням дорожньої обстановки, у якому на транспортному засобі встановлюють супутникову систему навігації і систему об'єктивного контролю водія, а перед запуском двигуна контролюють біометричні дані водія і стан здоров'я водія, і якщо вони відрізняється від порогового значення і на наявність алкоголю, то формують виконавчий сигнал, блокуючий включення двигуна, приймають інформацію про небезпечні гідрометеорологічні явища з гідрометеоцентрів і відображають її на дисплеї автомобіля разом з аналізом дорожньої обстановки. При цьому при неможливості запобігання зіткненню автомобіля з пішоходом, активують і подають сигнали керування на нижні подушки безпеки, які утворюють захисне і закрите з боків ложе, по якому пішохід переміщається убік до лобового скла, яке також захищене частиною подушки безпеки, а при спрацьовуванні датчика падіння тіла пішохода формують сигнали керування, при яких спрацьовують верхні подушки безпеки, які накривають нижні подушки безпеки з фіксацією верхніх подушок спеціальними клямками, а при перекиданні транспортного засобу, надувають подушки безпеки (airbag) зі всіх сторін UA 102564 C2 (12) UA 102564 C2 автомобіля - автомобіль виявляється усередині полого надутого куба, що огинає форму автомобіля, що захищається. Також контролюють дотримання правил дорожнього руху водієм автомобіля і у випадку якщо водій їх грубо порушує дистанційно і примусово припарковують автомобіль-порушник до найближчого відповідного місця і заглушають двигун. За допомогою запропонованого способу досягається більша безпека руху ТЗ, менша травмованість пішохода та пошкодження ТЗ при зіткненні. UA 102564 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до області машинобудування, зокрема автомобілебудування, а саме до способу захисту пішохода і транспортних засобів (ТЗ), зокрема автомобілів від пошкоджень при русі ТЗ на автомобільних дорогах, в різних аварійних ситуаціях, включаючи: небезпечні гідрометеорологічні явища (бурі, туман, град, снігопад, ожеледь і так далі), аварійні ділянки дороги, за наявності на проїжджій частині тварин і птахів із захистом автомобіля, водія, пасажирів салону автомобіля і пішохода від загибелі і важких пошкоджень, в надзвичайних умовах, коли зіткнення автомобіля з пішоходом неможливо запобігти, при цьому виключають появу в рухомих автомобілях водіїв, стан здоров'я яких не дозволяє безаварійно керувати автомобілем. Всього у рік у всьому світі відбувається 10 млн. зіткнень автомобілів (див. Public roads 2001, v.65 №1, р.41-48). В автомобільних аваріях в США в 2002 р. загинуло 9,400 чоловік, 1,4 млн. чол. - покалічено (див. Public roads 2004, с. 34-39), в Європі відповідно: 40.000 чоловік і 1,3 млн. чоловік (див. Traffic Technology. Int. 2004, F, March, p. 101-103). Тому навіть невеликий прогрес в області технологій по запобіганню аварійності автомобілів має дуже важливе значення для збереження людського життя і матеріальних цінностей. Близько 30 % травм при наїзді автомобіля на пішохода виникають від зіткнення людини з вітровим склом. Питанням захисту пішохода від наслідків зіткнення зайняті зараз автомобільні фірми і дослідницькі центри багатьох країн. Так, Роджер Харді з Кранфілдського університету (Великобританія) розробив експериментальну систему, що складається з виявника перешкод і величезної надувної подушки безпеки. Коли система помічає, що автомобіль ось-ось зіткнеться з людиною, частина капота перед склом автоматично піднімається і випускає велику роздуту подушку. Те ж саме відбувається і при зіткненні з іншим автомобілем. Вітрове скло Харді пропонує змонтувати на смужках металу, що деформуються, щоб при ударі воно злегка вдавлювалося всередину салону. Враховуючи, що водій пристебнутий ременем і перед ним теж спрацює подушка безпеки, втискування скла не нанесе шкоди водієві, а пішохід буде значною мірою захищений. Експерименти на "Фіате Стіло" при швидкості зіткнення з манекеном 40 км/ч показали, що система полегшує наслідки зіткнення більш ніж удвічі. Дослідники фірми "Фіат" пропонують передній бампер на пневматичних амортизаторах, що автоматично висувається вперед при швидкості більше 4 км/ч і поглинає, у разі удару, частину енергії. Співробітники Технологічного університету в Австрії шляхом комп'ютерного моделювання встановили, що радіатор вантажівки повинен бути злегка нахилений назад і мати форму книги, розкритої у бік водія, а корінцем - направленої назовні. Така форма дозволить зменшити вірогідність попадання збитого пішохода під колеса вантажівки на 80-90 %. Фірма "Вольво" поставила мету: добитися того, щоб до 2020 році її автомобілі не могли при зіткненні нікого убити або травмувати ні усередині салону, ні зовні. Модель ХС60, запущена в листопаді 2008 року, забезпечена системою, яка, за заявою фірми, здатна запобігти половині всіх зіткнень автомобілів в потоці на малій швидкості. Лазерний далекомір вимірює відстань до переднього автомобіля, 50 разів в секунду вимірює швидкість обох машин і розраховує різкість гальмування, потрібну, щоб запобігти зіткненню. Якщо водій машини не відреагує, система загальмує сама. Модель Volvo S60, 2010 року, здатна самостійно гальмувати перед пішоходом. Радар і відеокамера з програмою розпізнавання образів подають сигнал при появі людини перед капотом. Якщо водій не відреагує вмить, включається гальмування. Фірма заявляє, що ця система повністю запобіжить наїзду на пішохода при швидкості до 19 км/ч, а на вищих швидкостях зменшить силу зіткнення на 75 %. Також відомі і інші системи і способи запобігання зіткненням автомобілів. У автомобілі Jaguar XJ є система розпізнавання автомобіля з пішоходом. У разі зіткнення підводять капот на невелику висоту, щоб запобігти удару людини об жорсткі деталі двигуна, що знаходиться під капотом (див. http://www.spbvoditel.ru/2010/09/07/003/). Фірма Форд розробляє системи запобігання зіткненням (див. http://seclife.ru/article/fordrazrabatyvaet-sistemu-predotvrashcheniya-stolknovenii). Високотехнологічні захисні системи, що покликані запобігати різного роду дорожньо-транспортні події (ДТП), більш не є прерогативою автомобілів вищого класу. Ford веде активні розробки подібних систем для серійних моделей - після презентації Ford Smart Intersection, за допомогою якої автомобіль "спілкується" зі світлофорами і знаками через GPS, автовиробник оголосив про розробку ще однієї новинки - системи запобігання аваріям за 1 UA 102564 C2 5 10 15 20 25 30 35 40 45 50 55 допомогою вбудованого радара. Наступного року технологію планується представити в декількох моделях Ford. За допомогою звукового і візуального сигналів Collision Warning попереджає водія про потенційно небезпечні об'єкти на шляху автомобіля, будь то якісь перешкоди, або інші машини. Якщо водій не зреагував вчасно, комп'ютер активує так званий Brake Support, який у поєднанні з системою екстреного гальмування ЕВА зупиняє автомобіль до безпосереднього зіткнення. Недоліком цих систем є недостатня захищеність пішохода, оскільки він отримує травму від удару об металевий капот, а при великій швидкості автомобіля - серйозну травму або смертельні поранення. Відомий спосіб запобігання зіткненням автомобіля з перешкодами (див. Патент США № 7243026, МПК G08G 1/16). У цьому патенті детально описана автомобільна система, в якій виявляють перешкоди, отримують тривимірні зображення, що розпізнають за допомогою відеокамер, радіолокатора, датчиків швидкості руху, кута повороту рульового керування, дисплея виконавчого пристрою, виконавчого пристрою, керівника гальмівною системою і динаміка для попередження водія про небезпечну близькість перешкоди. Недоліками даного способу є: - відсутність захисту пішохода від пошкодження автомобілем і самого автомобіля у разі, коли зіткнення неминуче; - відсутність інформації про небезпечні гідрометеорологічні явища; - відсутність сполучення з системою GPS. Відомий пристрій запобігання зіткненню літака з птахами (див. NEBABIN, V. An On-board Bird Recognition Device for the Prevention of Bird strikes. International Bird Strike Committee. Proceeding and Papers. London 13-17 May, 1996, p. 555-560), при цьому птахів розпізнають по спектральних ознаках, величині ефективної поверхні розсіяння і здійснюють в повітрі маневр для ухилення від зіткнення птахів з літаком. Недоліком даного пристрою є те, що він не працює у разі наявності сторонніх предметів на ЗПС, що відбулося при катастрофі французького літака Конкорд на ЗПС в Парижі, який зіткнувся із стороннім предметом на ЗПС (див. Foreign-object Damage Cripples Concorde on Takeoff From Paris. Accid.Prev.2002, v.59., №4. p. 1-8). Відомий спосіб попередження загрози зіткнення літального апарата з перешкодами підстилаючої поверхні, тобто із землею (див. пат. RU № 2297047, МПК G08G 5/04, опубл. 10.04.2007). Спосіб полягає в попередньому формуванні бази даних рельєфу підстилаючої поверхні, аеронавігаційної бази даних, бази даних льотно-технічних характеристик літального апарата (ЛА). Обчислюють межі зони уваги і зони керування (ЗУ), виділяють перешкоду, що представляє найбільшу загрозу, що потрапило в ЗУ і що знаходиться в зоні прогнозу обчисленої траєкторії. З урахуванням даних про обмеження на параметри руху ЛА і зовнішніх дій обчислюють параметри номінального руху, що забезпечують проліт перешкоди на висоті, близькій до мінімально допустимою. Генерують сигнали керування згідно вибраному закону керування і з урахуванням дії чинників зовнішнього середовища, які подають на виконавські органи керування висотою польоту і тягою двигунів, а також виводять на екран командного пілотажного індикатора. Проте відомий спосіб має наступні недоліки: - необхідно враховувати рельєф місцевості і режим польоту (швидкість зустрічного або попутного вітру і ін.). Найбільш близьким по технічній суті до способу, що заявляється, є спосіб і система попередження зіткнень автомобіля з перешкодами, в т.ч. з поїздом, спецавтомобілями, поліцейськими, пожежниками (див. Патент США №6 924736, МПК G08G 1/23, В60Q, НПК 340/436). Спосіб полягає в тому, що приймають сигнали системи GPS, використовують дорожні карти, визначають взаємні швидкості щодо один одного, визначають місцеположення автомобілів, порівнюють інформацію про координати на контрольованій дорожній ділянці, формують застережливий сигнал на дисплей для запобігання зіткненню. Прототип і спосіб, що заявляється, мають наступні загальні ознаки: - використовують дані супутникової навігації - визначають місцеположення автомобіля; - приймають інформацію про ділянку дорогі; - на дисплеї автомобіля відображають отриману інформацію і враховують її при аналізі дорожньої обстановки. Проте відомий спосіб має наступні недоліки: 2 UA 102564 C2 5 10 15 20 25 30 35 40 45 50 55 60 - відсутність захисту пішохода від пошкоджень автомобілем і самого автомобіля у разі, коли зіткнення неминуче; - відсутність інформації про стан здоров'я, не враховують грубі порушення Правил дорожнього руху, а також дані про небезпечні гідрометеорологічні явища. Відомі способи також не забезпечують захист від небезпечних синоптичних явищ. Наприклад, в Нумеччині, де найбільш розвинене автомобілебудування з використанням високих технологій 9 квітня 2011 року на автобані, де всі чотири смуги швидкісної траси А 19 поблизу міста Росток були раптово занесені бурею з піску і землі. В результаті 8 загиблих, 41 поранених, зіткнулися 80 легкових автомобілів, 3 вантажівки, 20 машин спалахнули, зокрема вантажівка з легкозаймистими речовинами. Рух на автобані А 19 повністю перекрито через це погодне явище. Подібні явища нерідкі. Недавно вони відбулися в Китаї, в Австралії, в Саудівській Аравії в Ер-Ріяді (див. http://www.bbc.co.uk/rassian/international/2011/04/110409_germany_freak_sandstorm.shtml 09.04.2011). Для захисту від подібних масштабних катастроф в існуючих способах запобігання зіткненням транспортних засобів немає жодної функції. Автомобілі не виконують функції виявлення небезпечних гідрометеорологічних явищ, не виробляють сигналів, призначених для виконання маневру ухилення, або припинення руху і парковки в безпечному місці. В основу винаходу поставлено задачу створення способу забезпечення безаварійного руху транспортного засобу в різних аварійних ситуаціях, включаючи: небезпечні гідрометеорологічні явища (бурі, туман, ожеледь, снігопад, і так далі), аварійні ділянки дороги, наявність на проїжджій частині дороги тварин і птахів із захистом автомобіля, водія автомобіля, пасажирів салону автомобіля і пішохода від загибелі і важких пошкоджень, в надзвичайних умовах, коли зіткнення автомобіля з пішоходом неможливо запобігти, при цьому виключають доступ в автомобілі водіїв, стан здоров'я яких не дозволяє безаварійно керувати автомобілем. Поставлена задача вирішена в сингулярному способі забезпечення безаварійного руху транспортного засобу (автомобіля, літака, мотоцикла і так далі) в різних аварійних ситуаціях, включаючи: небезпечні гідрометеорологічні явища (бурі, туман, ожеледь, снігопад, і так далі), аварійні ділянки дороги, наявність на проїжджій частині дороги тварин і птахів із захистом автомобіля, водія автомобіля, пасажирів салону автомобіля і пішохода від загибелі і важких пошкоджень, в надзвичайних умовах, коли зіткнення автомобіля з пішоходом неможливо запобігти, при цьомувиключають доступ в автомобілі водіїв, стан здоров'я яких не дозволяє безаварійно керувати автомобілем, що включає постійний прийом даних супутникової навігації, визначення місцеположення автомобіля, прийом інформації про ділянку дороги, відображення на дисплеї автомобіля отриманої інформації з урахуванням дорожньої обстановки тим, що на транспортному засобі встановлюють супутникову систему навігації і систему об'єктивного контролю водія, а перед запуском двигуна контролюють біометричні дані водія і стан здоров'я водія, і якщо воно відрізняється від порогового значення і на наявність алкоголю, то формують виконавчий сигнал, блокуючий включення двигуна, приймають інформацію про небезпечні гідрометеорологічні явища з гідрометеоцентрів і відображають її на дисплеї автомобіля разом з аналізом дорожньої обстановки, при цьому при неможливості запобігання зіткненню автомобіля з пішоходом, активують і подають сигнали управління на нижні подушки безпеки, які утворюють захисне і закрите з бокам ложе, по якому пішохід переміщається убік до лобового скла, яке також захищене частиною подушки безпеки, а при спрацьовуванні датчика падіння тіла пішохода формують сигнали керування, при яких спрацьовують верхні подушки безпеки, які накривають нижні подушки безпеки з фіксацією верхніх подушок спеціальними клямками, а при перекиданні транспортного засобу, наприклад, автомобіля, спрацьовує пристрій аналізу дорожньої обстановки і ухвалення рішення формують сигнали керування і надувають подушки безпеки (airbag) з усіх сторін автомобіля - зліва ззаду, справа ззаду, зверху, знизу, справа спереду і зліва спереду - автомобіль виявляється усередині полого надутого куба, що огинає форму автомобіля, що захищається, також контролюють дотримання правил дорожнього руху водієм автомобіля і у випадку якщо водій їх грубо порушує дистанційно і примусово припарковують автомобіль-порушник до найближчого відповідного місця і заглушають двигун. При цьому додатково приймають точнішу навігаційну інформацію про місцеположення свого автомобіля і сусідніх автомобілів від системи місцевої навігації, а на рейковому транспортному засобі зменшують гальмівний шлях завдяки включення спеціальних електромагнітів, для зменшення гальмівного шляху, у разі потреби, додатково відстрілюють гальмівні парашути. Поставлена задача вирішена також тим, що для посилення відповідальності і зміцнення дисципліни в дотриманні правил дорожнього руху (ПДР) водієм при керуванні ним автомобілем і 3 UA 102564 C2 5 10 15 20 25 30 35 40 45 50 55 60 запобігання можливим аварійним ситуаціям, на всіх автомобілях встановлюють систему об'єктивного контролю (див. блок - 30, фіг. 8) - самописці на літаках так звані "чорні ящики", які фіксують параметри руху свого і сусідніх автомобілів передають по СПД 21 в систему контролю 17 за дорожнім рухом, - в дорожню поліцію і у разі спірної ситуації дані самописців використовують для з'ясування винної сторони. Від автомобілів передається на пункт контролю 17 за дорожнім рухом (дорожня поліція) - пінкод автомобіля, державний номер і реквізити власника. Новим у винаході, що заявляється, є те, що на транспортному засобі встановлюють супутникову систему навігації і систему об'єктивного контролю водія, а перед запуском двигуна контролюють біометричні дані водія і стан його здоров'я, і якщо воно відрізняється від порогового значення і на наявність алкоголю, то формують виконавчий сигнал, блокуючий включення двигуна, приймають інформацію про небезпечні гідрометеорологічні явища з гідрометеоцентрів і відображають її на дисплеї автомобіля разом з аналізом дорожньої обстановки, при цьому при неможливості запобігання зіткненню автомобіля з пішоходом, активують і подають сигнали керування на нижні подушки безпеки, які утворюють захисне і закрите з бокам ложе, по якому пішохід переміщається убік до лобового скла, яке також захищене частиною подушки безпеки, а при спрацьовуванні датчика падіння тіла пішохода формують сигнали керування, при яких спрацьовують верхні подушки безпеки, які накривають нижні подушки безпеки з фіксацією верхніх подушок спеціальними клямками, а при перекиданні транспортного засобу, наприклад, автомобіля, спрацьовує пристрій аналізу дорожньої обстановки і ухвалення рішення формують сигнали керування і надувають подушки безпеки (airbag) з усіх сторін автомобіля - зліва ззаду, справа ззаду, зверху, знизу, справа спереду і зліва спереду - автомобіль виявляється усередині полого надутого куба, що огинає форму автомобіля, також контролюють дотримання правил дорожнього руху водієм автомобіля і у випадку якщо водій їх грубо порушує дистанційно і примусово припарковують автомобільпорушник до найближчого відповідного місця і заглушають двигун. При цьому додатково приймають точнішу навігаційну інформацію про місцеположення свого автомобіля і сусідніх автомобілів від системи місцевої навігації, а на рейковому транспортному засобі зменшують гальмівний шлях шляхом включення спеціальних електромагнітів, для зменшення гальмівного шляху, у разі потреби, додатково відстрілюють гальмівні парашути. Спосіб полягає в огляді лівої, передньої і правої областей перед рухомим ТЗ і на самій поверхні землі на наявність об'єктів, що заважають, а також перешкод, ям, сторонніх предметів, а потім їх розпізнавання, за допомогою тривимірних датчиків різних діапазонів хвиль, що видають тривимірну інформацію: акустичних, інфрачервоного, радіолокації, оптичного діапазонів з подальшим збором інформації, розпізнаванням об'єкту, що знаходиться в зоні можливого зіткнення: пішохід крупного, середнього, малого розміру, тварина крупного, середнього, малого розміру, птах, інший транспортний засіб і його тип: вантажний автомобіль, легковий автомобіль, гужовий транспорт, мотоцикліст, велосипедист, виборі оптимального способу захисту автомобіля і об'єкту від можливого зіткнення і якщо зіткненню запобігти не можна, то вибирається оптимальний спосіб захисту автомобіля залежно від типу об'єкту можливого зіткнення. Технічний результат полягає в запобіганні або в зменшенні швидкості зіткнення ТЗ (автомобіля) з іншим об'єктом і істотному зменшенні пошкоджень ТЗ (автомобілю, літаку) і пішоходові від зіткнення ТЗ (автомобіля) (або повітряним судном) пішоходом або іншим об'єктом на автомобільній дорозі або ЗПС. Заявлений спосіб пояснюється наступними фігурами, де: Фіг. 1 пояснює - автомобіль з місцями установки подушок безпеки в нерозкритому (упакованому) стані. Фіг. 2 пояснює - автомобіль, перед яким знаходиться пішохід коли зіткнення неминуче унаслідок великої швидкості автомобіля, гальмівний шлях автомобіля І перевищує відстань до пішохода L. Фіг. 3 пояснює - автомобіль з розкритими нижніми подушками безпеки 1-го етапу порятунку пішохода, в ситуації коли І >L. Фіг. 4 пояснює розкриті нижні подушки безпеки і проміжне положення пішохода на 2-му етапі порятунку пішохода. Фіг. 5 пояснює розкриті верхні подушки безпеки на 3-му етапі порятунку пішохода - тобто його переміщення в замкнутий об'єм тим самим запобігають перельоту через вітрове скло, верх автомобіля, або падіння в сторони, або назад. Фіг. 6 пояснює розкриті зовнішні подушки безпеки (air bag) після спрацьовування датчика удару (зіткнення) при нагоді перевертання автомобіля або масового зіткнення автомобілів. 4 UA 102564 C2 5 10 15 20 25 30 35 40 45 50 55 Фіг. 7 пояснює, що для зменшення гальмівного шляху - вистрілюють гальмівні парашути в задню півсферу. Фіг. 8 пояснює структурну схему системи запобігання зіткненням автомобіля з перешкодою. Фіг. 9 пояснює графіки залежності вірогідності правильного розпізнавання Рn.р. від величини відношення сигнал/шум q і від кількості розпізнаваних сигналів mc . Всі автомобілі оснащують приймачами від системи супутникової навігації (ССН) GPS, або інший ССН, наприклад ГЛОНАС, як зараз всі автомобілі оснащені ременями безпеки. У навігатора GPS водій вводить кінцеву точку руху, а пропонована система з урахуванням дорожньої обстановки і того, що решта всіх автомобілів також оснащена системою GPS видає рекомендації за швидкістю і маневри при русі автомобіля (див. http://www.svt.vologda.ru/service/shops/gps/principle/). У системі проводять аналіз якості керування автомобілем водієм. Відомі пристрої і способи не забезпечують захист неадекватного водія, який за станом здоров'я може зробити аварію на своєму автомобілі, пошкодити інші автомобілі, покалічити пішоходів і так далі. Відомі пристрої не аналізують стан здоров'я водія і не блокують систему включення двигуна, в окремому випадку в двигунах внутрішнього згорання - систему запалення. Для виключення цих недоліків перед початком руху і запуском двигуна проводиться тестування біометричних даних водія, яке захищає автомобіль від угону, далі контролюють стан здоров'я водія, вимірюють частоту пульсу f n і артеріальний тиск: діастолічний (нижній) Рдіаст. і систолічний (верхній) Рсист. Подібні прилади відомі і широко використовуються, наприклад, електронний напівавтоматичний тонометр UA-604, фірма-виробник "A&D company, Ltd. Medical", Японія. Якщо: Pmах доп.діаст. > Pдіаст.тиск. > Рmіn доп.діаст. Pmах доп.сист. > Pсист.тиск. > Рmіn доп.діаст Fmах доп. > Fn > Fn min доп., то подається сигнал, який вирішує запуск двигуна автомобіля. Аналіз якості керування проводиться шляхом порівняння даних з блоку пам'яті правил дорожнього руху 40 і даних, що поступають, в пристрій аналізу дорожньої обстановки 39. Реалізовані подібні операції у відомих існуючих навчальних тренажерах для водіїв - початківців. Якщо водій грубо порушує правила дорожнього руху (ПДР), відповідні рекомендації системи навігації GPS, то на рульове керування і гальмо видається інформація, автомобіль спочатку коректується по маневру і швидкості, а якщо порушення правил дорожнього руху - грубі, або вони повторюються, то автомобіль примусово дистанційно паркується в найближчому відповідному місці, повідомляють за системою передачі даних 21 в систему контролю 17 дорожній поліції для вживання адекватних заходів. Це також дозволить виключити аварії у разі різкого погіршення здоров'я водія - керівника транспортним засобом, наприклад інсульту, інфаркту і так далі, а також терористів, самовбивць, через дії яких можуть постраждати сторонні люди. Перед початком руху - запуском двигуна автомобіля, в салоні автомобіля проводиться тестування водія на наявність алкоголю і наркотичних засобів - і при їх відсутності двигун заводиться. Поліпшення роботи системи досягають тим, що на автомобілях встановлюють навігаторі Системи супутникової навігації (ССН) GPS, тобто приймачі ССН. GPS-навігатори працюють від 24-х супутників системи глобального позиціонування Global Positioning System. Сигнал передається на відкритій частоті, по якому GPS-навігатори визначають координати точки свого знаходження з точністю від (10-15) м - для військового застосування і 100 м - для цивільного. Наявність відбитих радіохвиль при їх розповсюдженні в GPS-системі може погіршити точність вимірювання координат ще на 5 м. Точність GPS - достатньо для оцінної навігації, але недостатньо для запобігання зіткненням ТЗ. Тому встановлюють в аварійно-небезпечних місцях на висоті Н 2-3 випромінювачі місцевої системи, аналогічною GPS, що має назву Regional Positioning System (RPS), яку визначають з наступних формул. Відомо, що гранична дальність Rnpeд. Rпр.в ид (R 3 h)2 R 3 (R 3 H)2 R 3 R 3 2 2R 3 h h 2 R 3 R 3 2 2R 3 H H2 R 3 2 2R 3 ha ha 2 2R 3 Hrps Hrps 2 Оскільки 2R3 >>h; 2R3>>H, 5 . UA 102564 C2 для R=6.370 км, Hrps =36 м; h a =1 м отримаємо 5 10 15 20 25 30 35 40 45 50 55 Rпр.в ид 2 6.370 10 a 1 12 2 6.370 10 a 36 2 35.693 3569 39.263м 39км. (див. "Радиолокационные устройства. Теория и принципы построения". Под редакцией Григорина-Рябова - М. Советское радио. 1970. - С. 194). Таким чином, при підйомі антени системи RPS на висоту 3 м, висоті розташування приймача система RPS hа=1 м (тобто усередині автомобіля) отримаємо радіус дії системи RPS в 39 км, . що відповідає 2 Rпp.вид, так як діаметр рівний 2-м радіусам. Т.ч. приблизно на 80 км отримуємо зону покриття від однієї станції RPS. Принцип роботи системи RPS не відрізняється від відомих систем GPS, але оскільки дальність від передавача RPS до приймачів на ТЗ істотно менше, то точність визначення координат відповідно вище. Таким чином, за допомогою системи ССН GPS проводитися груба навігація, а точніша для маневру автомобілів при інтенсивному транспортному потоці використовують разом з даними інших датчиків - систему точної навігації RPS. Систему RPS можна встановлювати на вже існуючих і встановлених антенах мобільних систем зв'язки, які вже зараз перекривають всі суспільно значущі дороги більшості країн світу. Істотний вплив на результат реагування на аварійні ситуації надає людський фактор, а саме стан здоров'я водія, можливі помилкові або неадекватні дії, запізнювання в ухваленні рішення водієм транспортного засобу в умовах недоліку часу і нервового стресу. З метою зниження ризику зіткнень з наземними перешкодами, пішоходами, іншими автомобілями і так далі слід оперативно використовувати на транспортному засобі всю доступну вже сьогодні і додаткову інформацію про навколишнє оточення, її аналізу і ухвалення адекватного рішення, направленого на досягнення вищезгаданої мети. У випадку, якщо пристрій 39 - див. фіг. 8 аналізу дорожньої обстановки і ухвалення рішення про заходи пасивного і активного захисту виробляє сигнал про включення відповідних мір захисту, то на пристрій формування сигналів, що керують, 36 видаються виконавчі сигнали підключення адекватних мір захисту, включаючи: рульове керування, гальма, блокування двигуна, гальмівних парашутів 11 і 12, систему гальмування повітряним струменем 37, систему гальмування електромагнітом 38 (якщо транспортний засіб рухається по металевих рейках: поїзд, або монорельсовий транспорт), на відповідні подушки безпеки 1,2-10 (див. фіг. 8). Відомо, що час наповнення газом подушки безпеки (ПБ) складає близько 20-50 мілісекунд, -3 тобто 20-50×10 сек. (див. Florian Hessen. Retten und Bergen von Personen. Airbags ausgenustereugen 2001 №3, p. 19). ПБ заповнюється газом при подачі електричного імпульсу від відповідного датчика удару. Накачування подушки газом відбувається автоматично, коли сила зіткнення рівна силі удару автомобіля об цегляну стіну із швидкістю (16-26) км/год. У датчику відбувається зсув маси, замикається електричний контакт, запалюється піросистема. Газ утворюється і подається в подушку безпеки за рахунок хімічної реакції NaN 3 з KNO3 внаслідок чого утворюється газоподібний азот N2. Через деякий час (близько 10 секунд), газ починає просочуватися через крихітні отвори в подушці безпеки, і вона здувається і людина може рухатися. Сучасні подушки безпеки спрацьовують швидше, на їх розкриття йде не більше ніж 20 мл сек. (див. http://www.jcwiki.ru/). Відомо, що при швидкості від 32 до 128 км/годину гальмівний шлях автомобіля складає від 18 до 144 м. Недолік відомих транспортних засобів полягає в тому, що у разі появи пішохода перед автомобілем, водій не завжди встигає загальмувати, наприклад, якщо пішохід з'являється із-за невидимої перешкоди (автобуса, іншого автомобіля і так далі). Якщо зіткнення автомобіля з пішоходом, не дивлячись на всі можливі запобіжні засоби запобігти не вдається, в цьому випадку активують і подають сигнали керування з пристрою формування сигналів, що керують, 36 на нижні подушки безпеки, (див. фіг. 4), які утворюють захисне і закрите з боків ложе, по якому пішохід переміщається убік до лобового скла автомобіля, яке також захищене частиною подушки безпеки (див. фіг. 3, 4), спрацьовує датчик падіння тіла пішохода 23 і формують сигнали керування, спрацьовують верхні подушки безпеки (див. фіг. 5), які накривають нижні подушки безпеки (див. фіг. 5) і фіксують верхні подушки спеціальними клямками (затисками). У ситуації коли визначають, що транспортний засіб (автомобіль) починає перекидатися (перевертатися), спрацьовує пристрій аналізу дорожньої обстановки і ухвалення рішення і формуються сигнали керування, надуваються подушки безпеки (airbag) з усіх сторін автомобіля - зліва ззаду, справа ззаду, зверху, знизу, справа спереду і зліва спереду - внаслідок чого автомобіль виявляється усередині полого надутого куба, що огинає форму автомобіля, що складається з подушок безпеки (див. фіг. 6). 6 UA 102564 C2 5 10 15 20 25 30 35 40 45 50 55 Довжину гальмівного шляху автомобіля в екстрених аварійних випадках, зменшують додатково тим, що: - вистрілюють позаду автомобіля гальмівні парашути 11 і 12, (див. фіг. 1, фіг.7) збільшуючи опір повітрю; - випускають струмінь стислого повітря, аналогічно реверсному режиму роботи авіаційних двигунів. Такий пристрій відомий (див. пат. № 6191686 США, МПК В60Q 1/00. Gabriel Edwin Z. N 09/406409; Заявл. 27.09.1999; Опубл. 20.02.2001; НПК 340/435. Англ.). Цей пристрій забезпечує зниження зусилля удару при зіткненні автомобілів на швидкісних магістралях, і полегшує водієві автомобіля гальмування за час, достатній для запобігання аварії. Гальмування автомобіля здійснюється за рахунок струменів повітря високого тиску, що випускаються з повітряних клапанів, встановлених в передній частині автомобіля, і що створюють реактивну силу, що знижує швидкість руху автомобіля. Струмені повітря також відштовхують зустрічний автомобіль, знижуючи тим самим силу удару, клапани можуть повертатися з використанням системи дистанційного сервоприводу, забезпечуючи можливість водієві направити повітряні струмені у напрямі зустрічного автомобіля. Струмені повітря можуть випускатися автоматично. Додатково зменшити гальмівний шлях транспортного засобу можна шляхом установки на транспортних магістралях спеціальних електромагнітів (особливо для залізниць), для цього на колесах електровозів і тепловозів встановлюють могутні електромагніти, на яких подаються переривисті імпульси струму у момент екстреного гальмування, аналогічно як при роботі ABS в автомобілі. Реалізація пристроїв розпізнавання різних типів 28 (див. фіг. 8) детально описана в роботах: 1. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.Радио и связь. 1984 г.; 2. Nebabin V.G. Methods and Techniques of Radar Recognition. Boston-London. Artech House. 1995; 3. Multisensor Data Fusion and Applications. Paramond K. Varshney Siracuse University, New York. 13244. USA 4. Патент США № 7.102.496. МПК В 60 Q 1/00. Опубл. 05.09.2006. Multi-sensor integration for a vehicle. Реалізація пристрою аналізу дорожньої обстановки описана в роботах: 1. Commercial motor Vehicle Safety and Security Systems. [http://www.fmcsa.dot.gov/factsresearch/systems-technology/product-guides/collision-warning.htm] 2. Precrash System [http://en.wikipedia.org/Precrash_System] Решта пристроїв в системі, зображених на фіг. 8, широко відома і описана у відповідній літературі. Оцінка ефективності системи розпізнавання визначає якість роботи системи і способу запобігання зіткненню ТЗ з перешкодами. Оцінити цю ефективність можна за допомогою інформаційного підходу, який описаний в роботі Небабин В.Г., Гришин В.К. Методы и техника радиолокационного распознавания. Современное состояние, тенденции развития, перспективы. Зарубежная радиоэлектроника. 1992, №10 - С.5-20. Розглянемо детальніше цей підхід. Перевагою інформаційного підходу є, по-перше, зручність і відносна простота його застосування на практиці, особливо при використанні в (радіолокаційних системах) РЛС цифрових методів обробки і передачі інформації (що дозволяє спростити завдання вимог до швидкодії і об'єму пам'яті ЕВМ, а також до пропускної спроможності систем передачі даних); подруге, можливість порівняння різних систем розпізнавання радіолокації. Наприклад, в порівнянні з імовірнісними показниками якості інформаційний критерій, з одного боку, дозволяє порівнювати системи з показниками якості, отриманими в різних умовах (з різним числом класів розпізнаваних об'єктів, при різних значеннях вірогідності помилкового розпізнавання і т. п.), а з іншого боку, він дозволяє перейти від імовірнісних показників якості Рп.р. і Ро.р. до інформаційного показника І*. Інформаційний критерій має ще одну перевагу, оскільки при відомих параметрах РЛС і розпізнаваного об'єкту, він дозволяє оцінити показник інформативності РЛС у кожному конкретному випадку. Розглянемо показники ефективності детальніше. Ефективність систем автоматичного розпізнавання об'єктів може характеризуватися як імовірнісними параметрами - вірогідністю виявлення об'єкту, вірогідністю правильного розпізнавання і вірогідністю помилкових тривог, так і інформаційною кількістю інформації, видаваною системою. 7 UA 102564 C2 5 10 15 Вірогідність правильного виявлення Рп.о і правильного розпізнавання Рп.р визначаються формулами Рп.о = Nп.о/Nзаг, Рп.p=Nп.р /Nзаг, де Nп.о і Nп.р – число правильне виявлених і число правильне розпізнаних об'єктів, N oбщ – загальне число об'єктів в заданому об'ємі. Вірогідність помилкових тривог Рл.т за огляд (кадр) визначається формулою Pл.т =Nп.ч.л.т/Nо.ч.и, де Nп.ч.л.т – повне число помилкових тривог і Nо.ч.и - загальне число зображень в огляді (кадрі). Інформаційний підхід дозволяє порівняти системи автоматичного розпізнавання об'єктів, що розпізнають різну кількість об'єктів з різними показниками якості. Згідно з отриманими даними (див. Небабин В.Г. Выбор параметров РЛС для распознавания. Радиотехника. Москва. 1990. №5, - С. 16-18) кількість інформації І*, необхідної для розпізнавання, визначається виразом: 2(ln mc ln Pop ) I* F T log 2 [1 qu 2 ] F T log 2 [1 ], 1 Pop де ΔF - смуга частот РЛС; Т - час отримання і обробки інформації; qu 2Э ср No - відношення сигнал/шум по напрузі; Еср - середня енергія розпізнаваного сигналу; N0 - спектральна щільність потужності шуму; Pop , Pпр - вірогідність помилкового і правильного розпізнавання; 20 mc - число розпізнаваних сигналів. Так, наприклад, якщо розпізнавання здійснюється по дальнісному портрету, то mc nкл np np , де nкл - число розпізнаваних класів (типів) цілей, а np і np - число ракурсів об'єктів відповідно по азимуту β і куту місця ε. Мінімальна кількість інформації I*, необхідної для розпізнавання десяти класів сигналів (тобто mc = 10) з Pпр = 0,9 і Pop = 0,1 при простому сигналі. З фіг. 6 по кривій 6 набуваємо 25 значення qН = 9,7, або 19,5 дБ. Далі, вважаючи ΔF = 1/Т і, Т = (2-3)/ fмод , де Ті - тривалість зондуючих імпульсів, fмод - мінімальна частота модуляцій відбитого сигналу, при якому -6 30 35 40 45 50 6 здійснюється розпізнавання, при Ті = 10 С, fмод = 2 Гц отримуємо ΔF=10 Гц, Т = (1-1,5) с. Тоді 2 6• -1с с 2 6 І* = ΔF•Т•log2[1+qH ]=10 c •1 •log2[1+(9.7) ] 6,6•10 біт. Для вищої якості розпізнавання необхідна велика кількість інформації, тобто великі значення параметрів ΔF, Т і qu . Істотні відмінності, що заявляються, дозволяють отримати наступний технічний результат створити сингулярний спосіб забезпечення безаварійного руху транспортного засобу (автомобіля, літака, мотоцикла і так далі) в різних аварійних ситуаціях, включаючи: поява небезпечних гідрометеорологічних явищ (бурі, туман, ожеледь, снігопад, і так далі), аварійні ділянки дороги, наявність на проїжджій частині дороги тварин і птахів із захистом автомобіля, водія автомобіля, пасажирів салону автомобіля і пішохода від загибелі і важких пошкоджень, в надзвичайних умовах, коли зіткнення автомобіля з пішоходом неможливо запобігти, при цьому виключають доступ в автомобілі водіїв, стан здоров'я яких не дозволяє безаварійно управляти автомобілем. Усередині салону ТЗ також встановлюються подушки безпеки для захисту пасажирів салону і водія. Зовнішні подушки безпеки закріплюють під вирізами в корпусі автомобіля, які накривають спеціальним шаром матеріалу, останній проривається подушкою безпеки при її розкритті в аварійній ситуації, тобто аналогічно, як і в даний час закріплені внутрішні подушки безпеки. Якщо прив'язні ремені не пристебнуті, то блокують включення двигуна. Спосіб використовують таким чином. Водій відкриває дверці автомобіля через центральний замок або прикладаючи пальці, або аналізують інші біометричні дані водія (зіниці очей і ін.). Автомобіль обладнаний усіма перерахованими вище приладами безпеки, водій сідає в салон. Він покладає руки на кермо і прилади вимірюють усі необхідні параметри стану його здоров'я. Водій вносить у систему навігації свій пункт призначення. Якщо всі показники здоров'я у нормі, водій вмикає двигун і автомобіль починає рухатися по дорозі до пункту призначення. На дисплеї постійно зображується шлях та усі перешкоди та аварійні ділянки дороги, наявність на проїжджій частині 8 UA 102564 C2 5 10 15 20 25 30 35 дороги тварин і птахів. Якщо перешкоди з'являються миттєво, можлива активація подушок безпеки. Структурна схема системи запобігання зіткненням автомобіля з перешкодою наведена на фіг. 8, де: 1-10 - подушки безпеки автомобіля 11 - парашут для гальмування 12 - супутникова система навігації GPS 13 - система місцевої навігації RPS 14 - метео РЛС 15 - гідрометеоцентр 16 - система передачі даних 17 - система контролю за дорожнім рухом 18 - приймач гідрометеоінформації 19 - навігатор GPS 20 - приймач системи RPS 21 - система передачі даних СПД 22 - акустичні датчики 23 - датчик падіння тіла 24 - транспортний засіб 25 - дисплей автомобіля 26 - система обробки інформації 27 - РЛС 28 - пристрій комплексування даних і розпізнавання об'єктів 29 - контроль біометричних даних 30 - система об'єктивного контролю - регістратор даних 31 - ІК-датчики 32 - водій автомобіля 33 - відеокамери 34 - блок контролю здоров'я водія 35 - органи керування автомобіля: рульове керування, гальма, блокування двигуна 36 - пристрій формування сигналів, що керують 37 - система гальмування повітряним струменем 38 - система гальмування електромагнітів 39 - пристрій аналізу дорожньої обстановки і прийняття рішення про заходи пасивної і активної безпеки 40 - блок пам'яті правил дорожнього руху. Таким чином, спосіб, що заявляється, дозволяє враховувати всі можливі ситуації при русі транспортного засобу і забезпечує його безаварійність в тих ситуаціях, які в існуючих способах не враховуються. 40 ФОРМУЛА ВИНАХОДУ 45 50 55 60 1. Сингулярний спосіб забезпечення найменшого травмування перешкоди, у тому числі пішохода, та пошкодження транспортного засобу (ТЗ) при їх зіткненні, що включає визначення місцеположення транспортного засобу, прийом інформації про дорожню обстановку, відображення на дисплеї ТЗ отриманої інформації з урахуванням дорожньої обстановки, при цьому на ТЗ для визначення його місцеположення встановлюють супутникову систему навігації і систему об'єктивного контролю керуючого ТЗ, а перед запуском двигуна ТЗ контролюють стан здоров'я керуючого ТЗ, шляхом вимірювання біометричних даних і визначення наявності алкоголю, і формують виконавчий сигнал в залежності від стану здоров'я керуючого ТЗ відносно включення двигуна, приймають інформацію про небезпечні гідрометеорологічні явища з гідрометеоцентрів і відображають її на дисплеї ТЗ разом з аналізом дорожньої обстановки, при цьому при неможливості запобігання зіткненню ТЗ з перешкодою, активують і подають сигнали керування на подушки безпеки ТЗ, а при перекиданні ТЗ за допомогою пристрою аналізу дорожньої обстановки формують сигнали керування і надувають подушки безпеки зі всіх сторін ТЗ, також контролюють дотримання правил дорожнього руху по дорожніх знаках керуючим ТЗ і у випадку їх грубого порушення дистанційно і примусово припарковують ТЗ - порушник до найближчого відповідного місця і заглушають двигун, для зменшення гальмівного шляху, у разі потреби, додатково відстрілюють гальмівні парашути, який відрізняється тим, що аналізують наявність перешкод, що знаходяться в зоні можливого зіткнення за допомогою датчиків 9 UA 102564 C2 5 10 15 тривимірного огляду простору різної фізичної природи, а саме радіолокаційних, оптичних, інфрачервоних, акустичних і так далі, встановлених на ТЗ, а при неможливості запобігання зіткнення ТЗ з перешкодою-пішоходом подають сигнали керування і активують нижні подушки безпеки ТЗ, які утворюють захисне і закрите з боків ложе, по якому перешкода-пішохід переміщається від лобової частини ТЗ, яку також захищають подушкою безпеки, а при спрацьовуванні датчика падіння перешкоди-пішохода - формують сигнали керування, при яких спрацьовують верхні подушки безпеки, які накривають нижні подушки безпеки з фіксацією верхніх подушок спеціальними клямками. 2. Спосіб за п. 1, який відрізняється тим, що додатково приймають точнішу навігаційну інформацію про місцеположення свого ТЗ і сусідніх ТЗ від системи місцевої навігації. 3. Спосіб за п. 1, який відрізняється тим, що при перевертанні ТЗ спрацьовує пристрій аналізу дорожньої обстановки і ухвалення рішення, що формує сигнали керування і надувають подушки безпеки зі всіх сторін ТЗ - зліва ззаду, справа ззаду, зверху, знизу, справа спереду і зліва спереду - ТЗ виявляється усередині порожнистого надутого захисного покриття, що огинає форму ТЗ, що захищається. 4. Спосіб за п. 1, який відрізняється тим, що при контролі дотримання правил дорожнього руху (ПДР) керуючим ТЗ, контролюють швидкість руху, дорожні розмітки, правила зупинки, стоянок, обгону ТЗ, переїзду перегонів інтервалів та дистанції руху, зустрічного роз'їзду. 10 UA 102564 C2 11 UA 102564 C2 12 UA 102564 C2 13 UA 102564 C2 14 UA 102564 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 15
ДивитисяДодаткова інформація
Назва патенту англійськоюSingular method for the provision of vehicle accident-free traffic in emergency situations
Автори англійськоюNebabin Viktor Heorhiiovych
Назва патенту російськоюСингулярный способ обеспечения безаварийного движения транспортного средства в аварийных ситуациях
Автори російськоюНебабин Виктор Георгиевич
МПК / Мітки
МПК: B60Q 11/00, B60R 21/00, G08G 1/16
Мітки: сингулярний, засобу, транспортного, забезпечення, руху, спосіб, безаварійного, сітуаціях, аварійних
Код посилання
<a href="https://ua.patents.su/17-102564-singulyarnijj-sposib-zabezpechennya-bezavarijjnogo-rukhu-transportnogo-zasobu-v-avarijjnikh-situaciyakh.html" target="_blank" rel="follow" title="База патентів України">Сингулярний спосіб забезпечення безаварійного руху транспортного засобу в аварійних ситуаціях</a>
Сингулярний спосіб забезпечення гарантованого безаварійного руху транспортного засобу в різних аварійних ситуаціях
Номер патенту: 62506
Опубліковано: 25.08.2011
Автор: Небабін Віктор Георгійович
МПК: B60Q 1/00, G08G 1/16, B60W 30/06, G08G 5/00
Мітки: сітуаціях, засобу, спосіб, різних, аварійних, транспортного, руху, сингулярний, гарантованого, безаварійного, забезпечення
Формула / Реферат:
1. Сингулярний спосіб забезпечення гарантованого безаварійного руху транспортного засобу в різних аварійних ситуаціях, що включає визначення місцеположення транспортного засобу (ТЗ), прийом інформації про дорожню обстановку, відображення на дисплеї ТЗ отриманої інформації з урахуванням дорожньої обстановки, який відрізняється тим, що на ТЗ встановлюють супутникову систему навігації і систему об'єктивного контролю керуючого ТЗ, а перед...
Спосіб забезпечення гарантованого безаварійного руху надводного чи підводного судна в різних аварійних ситуаціях за наявності підводних і надводних потенційно небезпечних об’єктів
Номер патенту: 73118
Опубліковано: 10.09.2012
Автор: Небабін Віктор Георгійович
МПК: B60W 30/00, B60Q 1/00
Мітки: аварійних, небезпечних, наявності, судна, надводних, різних, надводного, підводного, безаварійного, спосіб, потенційно, об'єктів, підводних, гарантованого, забезпечення, сітуаціях, руху
Формула / Реферат:
1. Спосіб забезпечення гарантованого безаварійного руху надводного чи підводного судна в різних аварійних ситуаціях за наявності підводних і надводних потенційно небезпечних об'єктів (ПНО) в тому числі в надзвичайних умовах, коли за допомогою звичайного маневрування судном неможливо уникнути зіткнення з ПНО, що включає постійний прийом даних супутникових навігаційних систем, даних від РЛС, автоматичної ідентифікаційної системи, визначення...
Спосіб забезпечення робочого стану сигналів гальмування транспортного засобу
Номер патенту: 52908
Опубліковано: 10.09.2010
Автори: Сендецький Микола Миколайович, АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ
МПК: B60W 50/08
Мітки: гальмування, робочого, забезпечення, спосіб, стану, сигналів, транспортного, засобу
Формула / Реферат:
Спосіб забезпечення робочого стану сигналів гальмування транспортного засобу, при якому послідовно підключають реле включення сигналів гальмування, електричний дріт ланцюга керування і датчик включення сигналів гальмування, комутують ланцюг керування за допомогою датчика включення сигналів гальмування, який відрізняється тим, що виготовляють додатково пружний елемент довжиною 25-35 мм і товщиною 2-3 мм із електропровідного матеріалу у випадку...
Спосіб енергоакумулюючого руху транспортного засобу

Номер патенту: 90808
Опубліковано: 25.05.2010
Автор: Бєлов Михайло Геннадійович
МПК: B60K 31/00
Мітки: транспортного, засобу, спосіб, енергоакумулюючого, руху
Формула / Реферат:
Спосіб енергоакумулюючого руху транспортного засобу, що включає передачу крутного моменту від двигуна внутрішнього згоряння на ведучі колеса транспортного засобу при його рушанні, русі і гальмуванні, який відрізняється тим, що перед рушанням транспортного засобу передачу крутного моменту здійснюють від двигуна внутрішнього згоряння на генератор, яким виробляють електричну енергію і передають її електричному двигуну, обертаючому маховик, а...
Спосіб надання екстреної технічної допомоги у стандартних дорожніх ситуаціях виходу із ладу транспортного засобу
Номер патенту: 23383
Опубліковано: 25.05.2007
Автор: Нємцов Борис Юрійович
МПК: B60S 5/00
Мітки: засобу, екстреної, дорожніх, надання, стандартних, технічної, ладу, виходу, допомоги, сітуаціях, транспортного, спосіб
Формула / Реферат:
Спосіб надання екстреної технічної допомоги у стандартних дорожніх ситуаціях виходу із ладу транспортного засобу, за яким здійснюють налагодження, ремонт або заправку автомобіля пальним, який відрізняється тим, що екстрену технічну допомогу надають безпосередньо на місці виникнення дорожньої ситуації, як заздалегідь передплачену користувачем послугу купівлею пластикової картки "Автодопомога", яка є підтвердженням права на отримання...
Попередній патент: Молот безшаботний гідравлічний вертикальний
Наступний патент: Фармацевтична композиція для системного лікування інвазії паразитів, що ссуть кров або кормляться кров’ю, що як антипаразитичний препарат містить імідаклоприд
Випадковий патент: Спосіб поляризаційного обертання хвильового фронту електромагнітного поля