Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників gps і глонасс
Номер патенту: 31662
Опубліковано: 15.12.2000
Автори: Лук'яненко Микола Васильович, Кириченко Олександр Іванович, Дубінко Юрій Сергійович, Борсук Олег Анатолійович

Текст
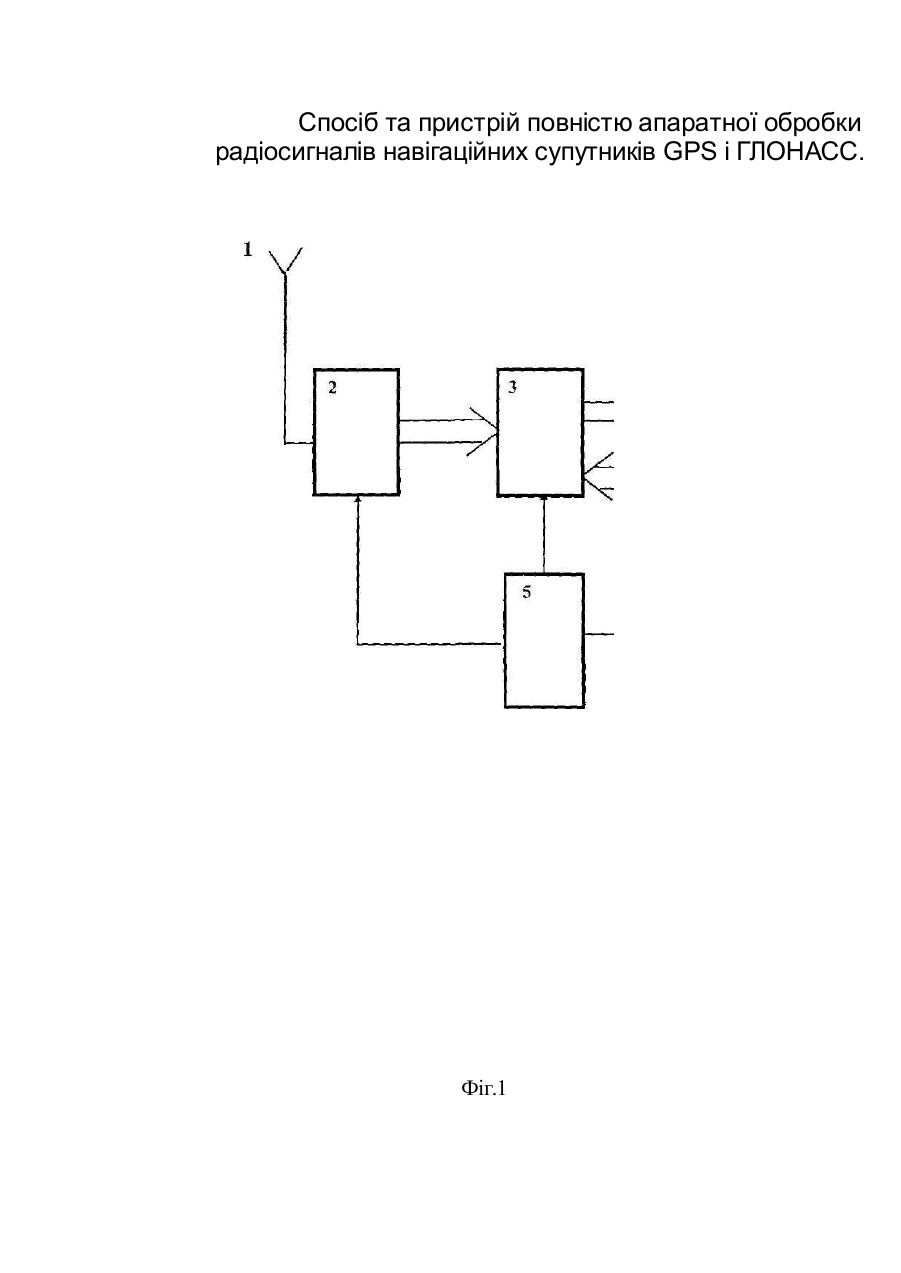
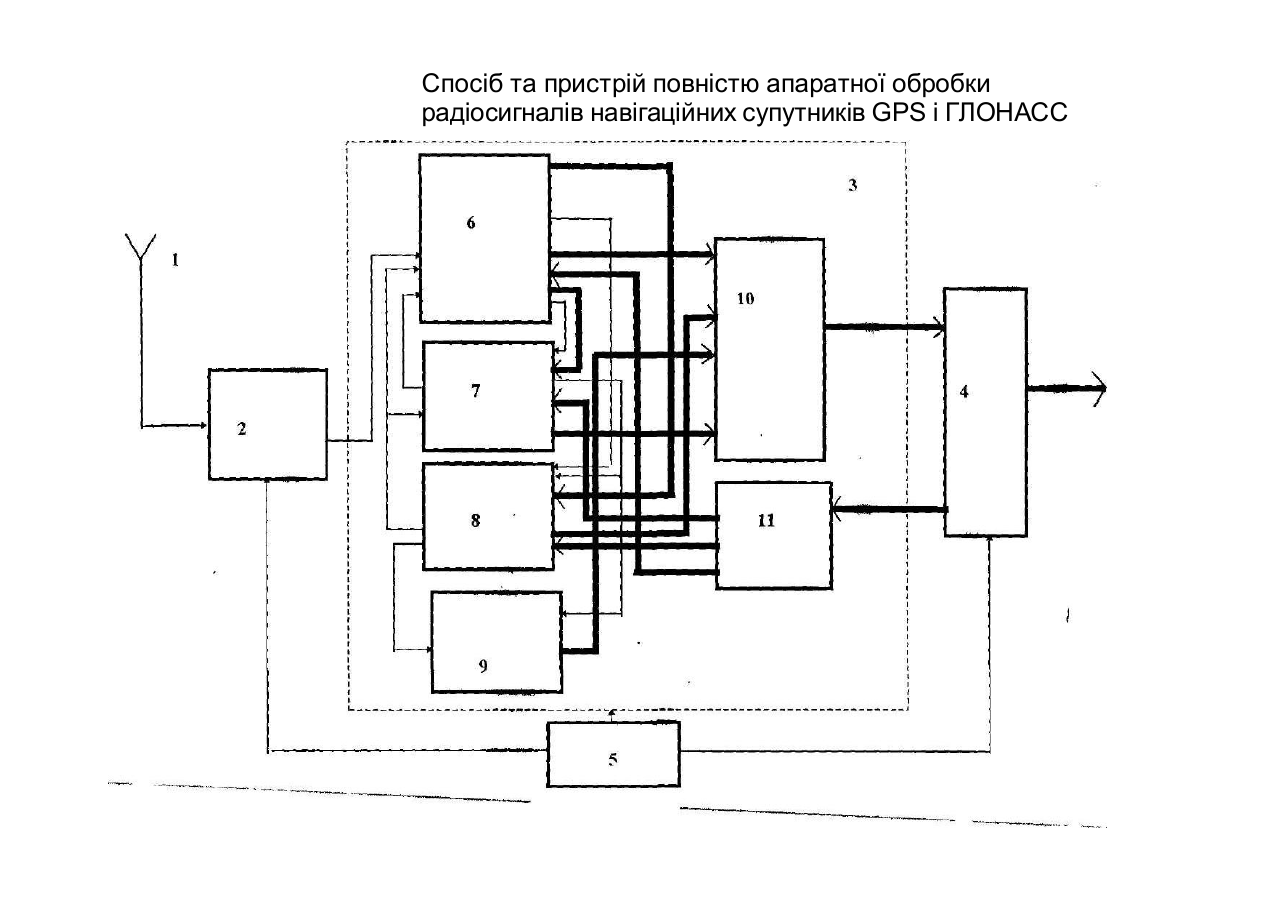
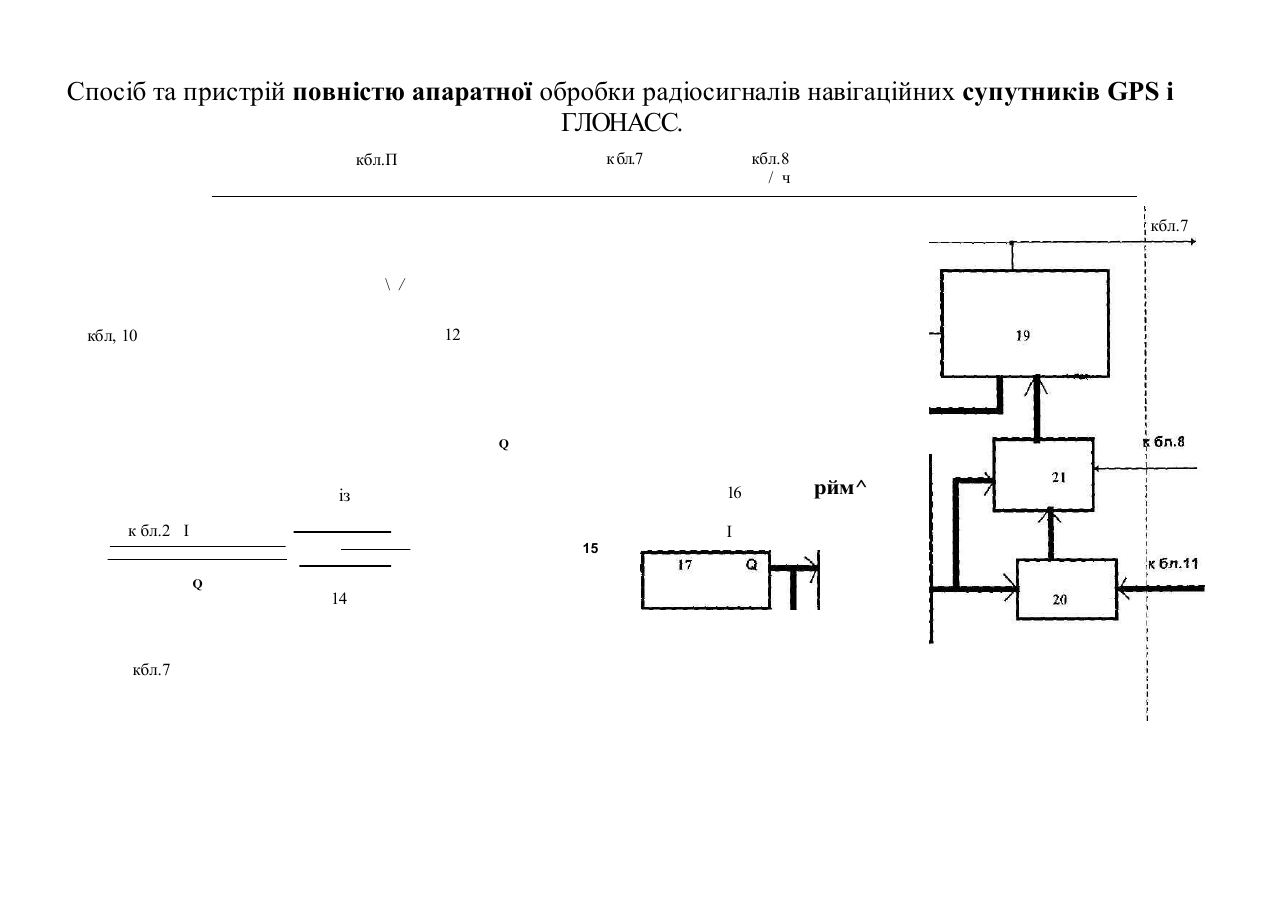
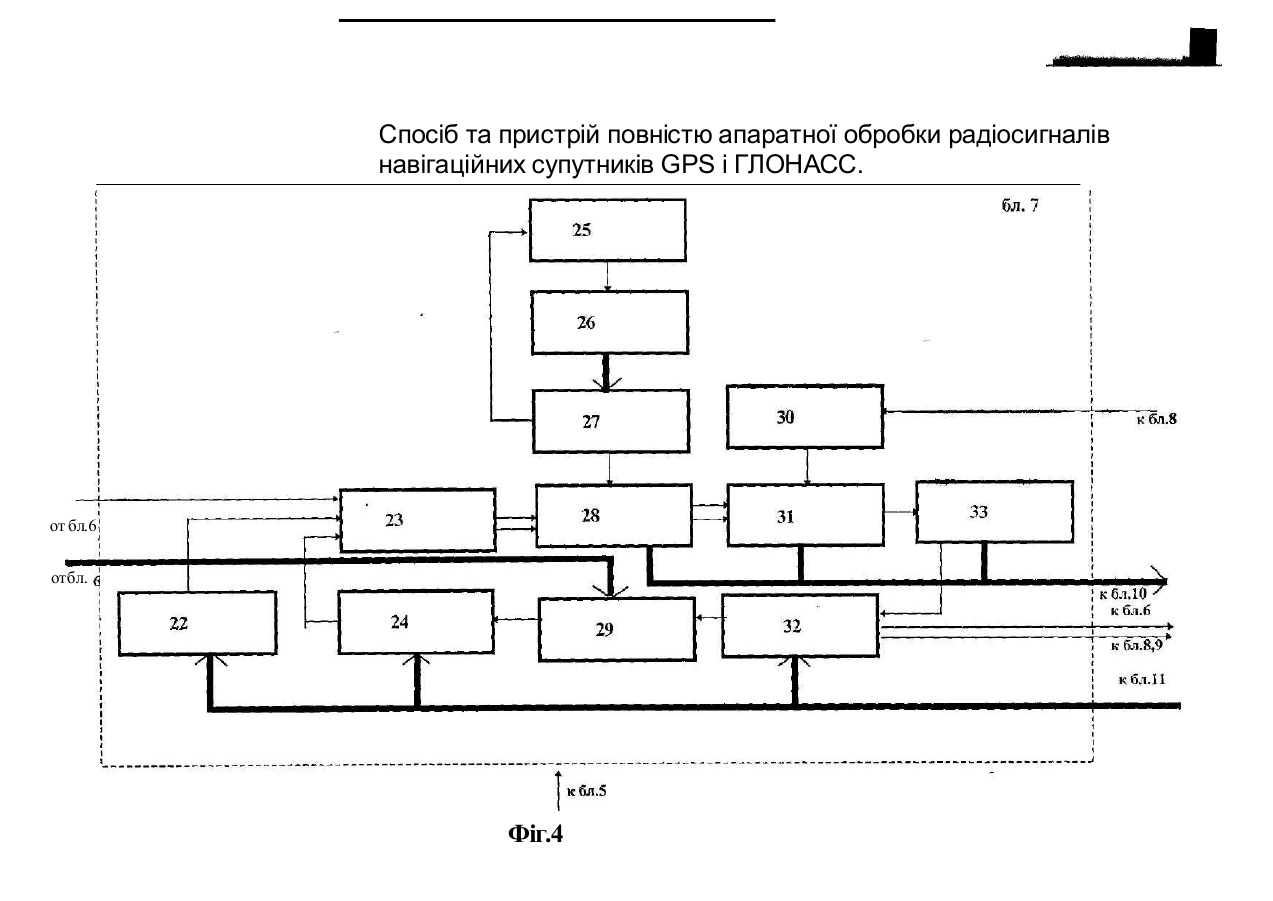
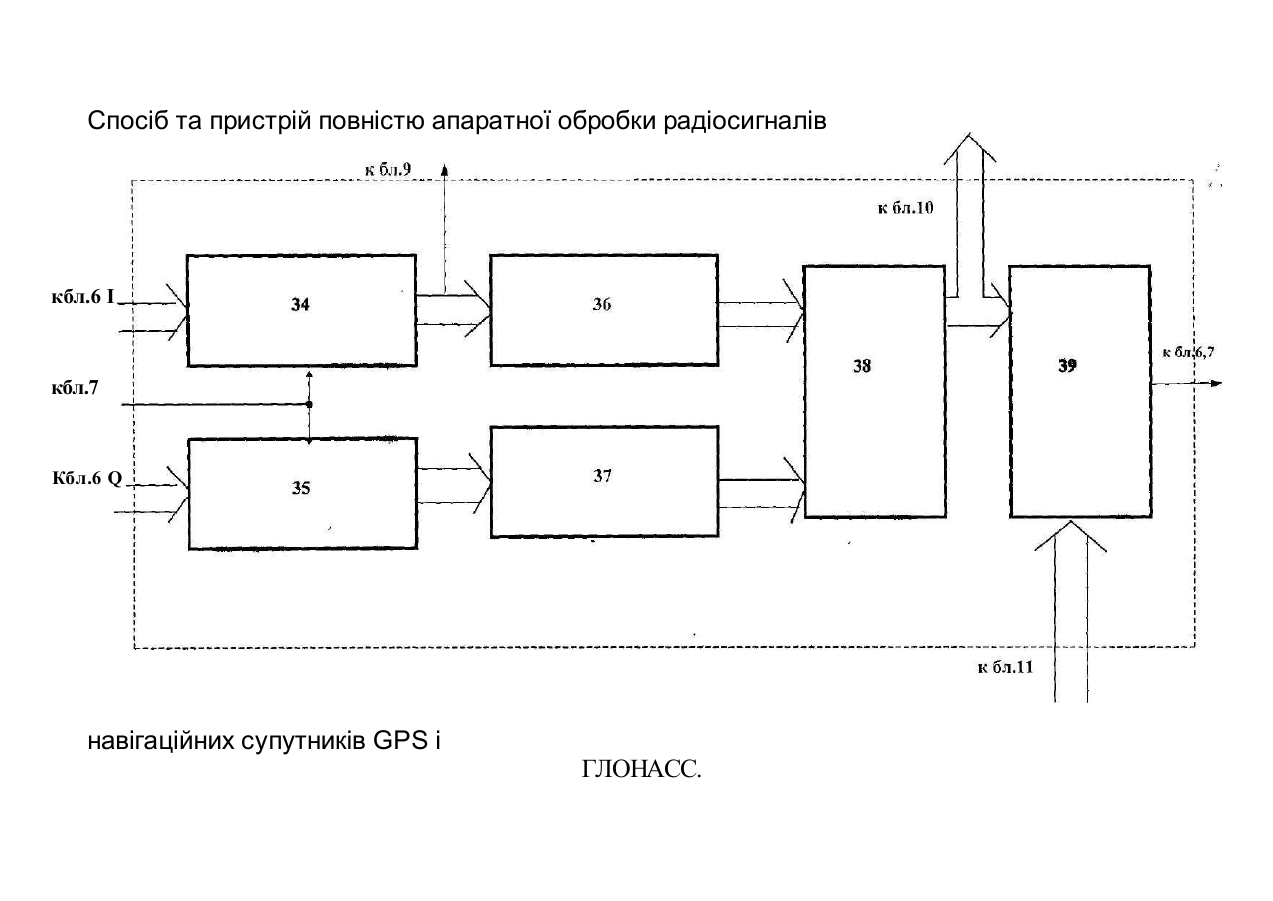
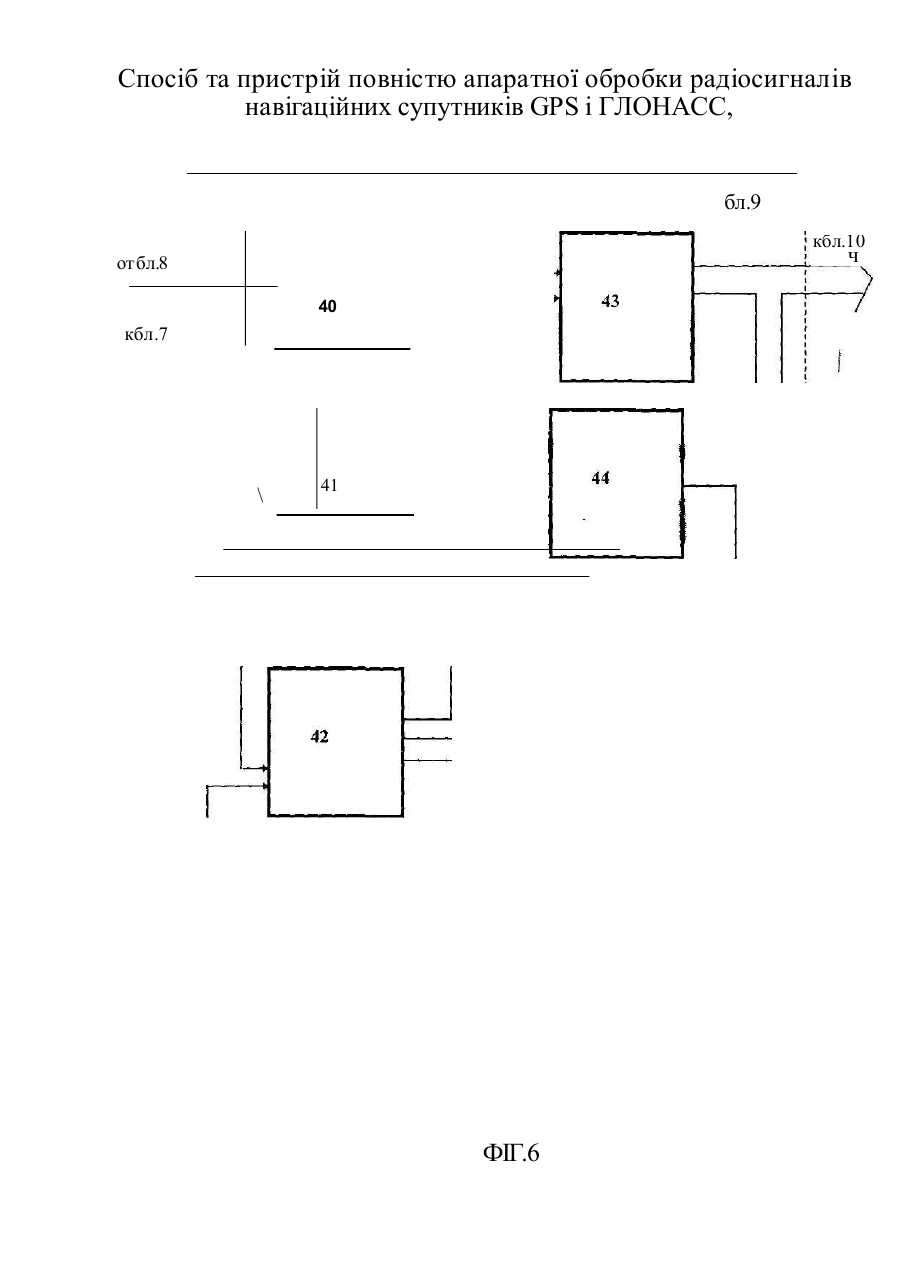
Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників GPS і ҐЛОНАСС. € MKBG01S 1/30 , G01S 5/00 Винахідниці Борсук0>А., Дубінко 4 / \ / У Киоименко \У, Лук'яйеико М. В. Заявник: ДП входів вихідного регістру, вихід якого є входом навігаційного процесора, а перший ВИХІ,Е навігаційного процесора є входом вхідного регістра. Відмінними ознаками спосібу є - уся цифрова обробка радіосигналів супутникіЕ здійснюється в апаратному цифровому спеціалізованому процесорі радіосигналі! супутників (АЦСПРС) і містить наступні операції: стеження за тактовою частоток передачі службової інформації, а також операції по реалізації системи входження і зв'язок, що містять пошук сигналу по частоті та фазі несучої, пошук сигналу по затрими коду. Сукупність запропонованих ознак дозволяє розширити функціональни потенційни можливости і збіль шення швидкодії отримання оцінок радіонавігаційним параметрів ' Мета винаходу: розширення функціональних і потенційних можливостей способ1 і збіль шення швидкодії отримання оцінок радіонавігаційних параметрів. Мет; досягається тим, що при способі що містить прийом сигналів супутників обох систем н, спільну антену, попередню розподіль ну фільтрацію, підсилення, попередню аналогов обробку, що містить перетворення частоти вниз, фільтрацію і підсилення проміжни частот, роз щеплення по фазі сигналів проміжних частот на квадратурні складов перетворення аналогових квадратурних сигналів кожної із систем в цифрову форм} цифрову обробку радіосигналів, а також повторну програмну обробку виміряни значень радіонавігаційних параметрів по відомим алгоритмам, вся цифрова обробк радіосигналів супутників здійснюється в апаратному цифровому спеціалізованою процесорі радіосигналів супутників ( АЦСПРС ), і містить наступні операціїхтеження з частотою і фазою несучої; стеження за затримкою коду; стеження за тактово частотою передачі службової Інформації; а також операції по реалізації cxeiv входження в зв'язок, що містять пошук сигналу по частоті і фазі несучої, пошук сигнаг по затримці коду. На кресленні фіг. 1 приведена структурна блок-схема приладу, що реаліз\ запропонований спосіб апаратної обробки радіосигналів, де 1 - антена, 2- аналоговіпроцесор, 3 - повністю апаратний цифровий спеціалізований процесор радіосигнале (АЦСПРС), 4-навігаційний процесор, 5 - опорний генератор. J На фіг. 2 представлена блок схема апаратного цифрового спеціалізовано процесору радіосигналів супутників (АЦСПРС ), де 6 - цифрова замкнута з дискретніуправлінням фази система стеження за несучою; 7 - цифрова замкнута з дискретні управлінням фази система стеження за затримкою коду; 8 - цифрова апаратна систег входження в зв'язок, що здійснюєчи пошук сигналу по частоті, фазі несучої і затри/і коду і зупинку пошуку при захопленні сигналу супутнику; 9 - цифрова замкнута дискретним управлінням фазою система тактової синхронізації прийому ефемері інформації; 10 - вихідний регістр АЦСПРС; 11 - вхідний регістр управління АЦСПРС Пристрій працює слідуючим чином. Цифрова замкнута з дискретним управлінн фази система стеження за несучою здійснює стеження за частотою і фазою несу вхідного сигналу. Цифрова замкнута з дискретним управлінням фази система стежеь за затримкою коду здійснює стеження за затримкою дальномірного коду, а цифре замкнута з дискретним управлінням фазою система тактової синхронізації прийс ефемерідної інформації здійснює тактову синхронізацію службової (ефемерідне 5 інформації і її виділення. Результати функціонування цих систем у вигляді кодів поточного набігу фази несучої, затримки коду і пакетів ефемерідної інформації надходить до вихідного регістру АЦСПРС для передачі в навігаційний процесор. Цифрова апаратна система входження в зв'язок керує пошуком сигналу по частоті і фазі несучої (ССН ) і по затримці даль номірного коду ( ССЗ ). Для управління режимами роботи всіх зазначених вище систем ( включно вибір супутника для пошуку ) навігаційний процесор виробляє відповідні установки, що передаються в АЦСПРС Через ЙОГО В ХІД НИЙ реГІСТр 3 ТеМПОМ ЮГЦ. СИСТеМИ СТежеННЯ За НесуЧОЮ І Стеж ення Зс затримкою коду взаємозв'язані з метою забезпечення повністю когерентної оброби радіосигналів. На фіг. З подана структурна схема цифрової замкнутої з дискретниі\ управлінням фази системи стеження за несучою (ССН ) запропонованого АЦСПРС, ДЕ 12 - синтезатор, 13, 14, 15 - перший, другий і третій перемножувачі, 16 і - 17 перший другий цифрові фільтри, 18 - частотний та фазовий дискримінатор, 19 і 20 - перший другий накопичуючі суматори, 21 - комутатор. [ Пристрій працює наступним чином. Оцифрован! квадратурні сигнали сумш корисного сигналу і шуму з бл.2 надходить на перемножувачі 13, 14. На другі вход перемножувачів надходить відстежений код з бл.7. З виходу перемножувачів 13 і 1 квадратурні складові надходять на комплексний перемножувач 15 на другі входи якої надходять квадратурні сигнали відстеженої частоти по системам GPS NAVSTAR ГЛОНАСС. Установка частоти синтезатора зді йснюється з бл. 11. Синтезак проміжних частот включений до замкненої цифрової системи стеження, тому відли синтезатора є вимірами фази несучої, що поступають в бл.10. З виходу бл. ' квадратурні складові на нулевій частоті надходять до першего та другого філь тр нижніх частот 16, 17 з частотою зрізу порядку 1 кГц. І- складова з вихо, перемножувача 16 надходять до кільця ССЗ бл. 7. З виходу ФНЧ відліки І і Q вибор надходять до блоку 8 - блок керування пошуком і до бл 18 частотного та фазове дискримінатора. Фазовий дискримінатор побудовано як октантний арктангенси дискримінатор. Відліки з виходу дискримінатора надходять до суматора 20 і комутатс 21. Суматори 20, 19 і комутатор 21 утворюють генератор частоти з цифров управ лінням. Установка необхідною частоти пошука здійснюється з бл.11 записом кс до суматора 20. Комутатор здійснює управління режимами роботи ГЦУ переходом з режі пошуку по частоті в режим стеження за фазою, зміною параметрів петпі стеження несучою по сигналам з бл.8. Відліки на виході суматора 19 являють собою інтегроваї доплеровський сдвиг і надходять до бл.10. Почетверена вихідна відстежена частої 6 суматору 19 замикає кільце, надходячи до входу управління синтезатором 12, надходить до кільця ССЗ бл.7 для забеспечення когерентності петлі бл.6 і 7. На фіг. 4 приведна структурна схема цифрової замкнутої з дискретниі управлінням фазою системи стеження за затримкою коду ( ССЗ ) запропонованог АЦСПРС з апаратною підтримкою відстеженої ССН доплеровською частотою, де 22 блок коригування фази коду , 23 - схема "арбітр ", 24 - перший накопичуючий сумато) 25 - блок управління, 26 - ПЗГЦпостійний запом'ятовуючий пристрій),. 27 - другі' накопичуючий суматор, 28 - перший діль ник, 29 - дискримінатор затримки, ЗО синтезатор частоти, , 31 - другий дільник, 32 - генератор коду, 33 - третій дільник. Сигнал почетвереной доплерівскої частоті приходить з створювача цифров замкненої з дискретним управ лінням фазою системи стеження за несучою на вхід схеми «арбітр» 23. Логічна схема «арбітр» є суматором трьох потоків імпульсів різн знаків. Якщо на її входи одночасно надходять імпульси різних знаків, вони взаем компенсуються, якщо одного знаку - складуються, , На вхід 2 схеми «арбітр» надходить сигнал з виходу блоку корекції фази ; Блок корекції фази призначений для корекції похибки в слідкуванні за затримкою ко^ яка викликана постійним коефіцієнтом ділення доплерівської частоти у цифрої замкненої з дискретним управлінням фазою системи стеження за затримкою коду, яідорівнює 3140 для системи ГЛОНАСС. Блок корекції фази коректує даний коефіції згідно до кожного літера ГЛОНАСС. На вхід 3 схеми «арбітр» приходить сигнал з виходу першого накопичую ч суматора 24, який несе інформацію про затримку коду. ' \ З виходу схеми «арбітр» сигнал поступає на вхід першого дільника частоти 2 змінним коефіцієнтом ділення 9/10. Сумарний коефіцієнт ділення пер шого діль н відповідно для системи Навстар 9 10/16, для системи ГЛОНАСС 9 13/16 , досягається сінхронною роботою трьох блоків: блока керування 25, блока ПЗП 2і другого канала суматора 27. Блок керування 25 керує роботою чотирьохрозрядного накопичуючого сумат керування 2 та 3. Сигнал з виходу другого дільника надходить поступає на вхід керування третьогс діль ника 33, Третій діль ник здійснює ділення тактової частоти 20 МГц на коефіцієк 19/20. При наявності на вході керуючого сигналу з виходу другого дільника проводиться ділення на 19, при відсутності на 20. Для роботи по КА система ГЛОНАСС третій діль ник доповнений простим діль ником на 2. Виміри з усіх трьох лічиль ник! надходять у вихідний регістр 10 з темпом 10Гц та дозволяють проводити вимір дальності з точністью 5 см. І На вході бл.ЗЗ формується тактова частота NAVSTAR 1,023+-Рдоп./1540 МГц т ГЛ ОНАСС 0,511+-FAon. /3140 МГц, яка поступає на генератор коду бл.З: Сформований ПВП код надходить на перемножувач бл.6. Похідні цього коду, які мають кінцеву тривалість, що дорівнює 0,05 від тривалос біта кода, поступають в дискримінатор по затримці кода 29. На другий вх дискрімінатора поступає І-відповідна з бл.6 цифрової замкненої з дискретні ' управлінням фазою системи стеження за несучою. J Похібки стеження за затримкою кода фільтруються в суматорі 24 та у вигл? потоку імпуль сів поступають в схему «арбитр» 23 та замикають кіль це стеження затримкою кода. , Постійна часу цифрової замкненої з дискретним управлінням фазою систе1 стеження за затримкою коду може змінюватись записом коду з блоку 11 в перш суматор 24 змінюючи його розрядності. І На фіг.5 приведена структурна схема цифрової апаратної системи входженні зв'язок, яка здійснює зупинку пошуку при захоплені сигналу КА, та дозволяє проводі оцінку співвідношення сигнал/шум в режимі слідкування за сигналом КА. Схема складається з наступних блоків: \ 34 - перший накопичуючий суматор, 35 - другий накопичуючий суматор, З перша схема отримання модуля числа, 37 - друга схема отримання модуля числа, ; суматор, 39 - схема порівняння. Пристрій працює поступним чином. Оцифрован! І та Q виборки з виходу ФНЧ бл.7 поступають на входи відпові першого та другого накопичуючих суматорів. Інтервал накопичення задасться сигна «епоха», який надходить з виходу бл. 7. . Резуль тати накопичень поступають відповідно в блоки 36, 37, де беремодуль отриманих чисел. Модулі І та Q виборок на інтервалі накопиче 8 підсумовуються в суматор 38 і порівнюються з порогом у блоку порівняння 39 При перевищенні результату підсумовування порогу, встановлюється команда, яка закінчує пошук сигналів КА і поступає в бл. 6, 7. Поріг порівняння видається з бл 11. Знак накопиченого числа І виборкі поступає в схему бітової синхронізації бл.9. ' Резуль тат підсумовування модулів І та Q виборок в режимі слідкуванн надходить в бл. 10 і використовується як співвідношення сигнал/шум. і На фіг. 6 приведена структурна схема цифрової замкненої з дискретниі управлінням системи тактової синхронізації прийому ефимерідної інформації, де 40 перший накопичуючий суматор, 41 - детектор фронту біта, 42 - дільник, 43 - зсувне регістр, 44 - другий накопичуючий суматор. Пристрій працює таким чином. На вхід першого накопичуючого суматора надходить інформація з бл. 8, про зн. Єї на інтервалі 1 мс. Інформація накопичується на інтервал біта Єї Юмс чи 20мс залежності від вибору системи ГЛОНАСС чи NAVSTAR. Біти Єї з виходу суматора поступають на зсувний регістр 43, та з його виходу з темпом 10 Гц поступають в бл. 1 На вхід дільника 22 поступають сигнали епохи з бл.7. І Діль ник формує інтервал накопления для накопичуючого суматора 40. Ст виходу дільника фіксується з темпом 10 Гц та надходить в бл.10. Детектор фронту біта Єї 41 здійснює формування сигналу неузгодженності Р поточним станом фронту біта Єї, поступаючого на входи з бл.8 та станом фронту біт діль нику 42. Неузгодженность згладжується від випадкових викидів у каналі суматс 44. Сигнал з його виходу синхронізує дільника 42. | Перелік використаноїт літератури: 1.Бор товые ус тро йс тва с путников о й р ад ио нав игац ии / И .В .К удряві И Н.Мищенко, А.И.Волынкин - М.: Транспорт, 1988/. 2.Сетевые спутниковые радионавигационные системы П.П.Дмитриев, Н.В.Иванцевич - М.: Радио и связь, 1993/. i Sf /В С.Шебшае Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників GPS і ГЛОНАСС. Фіг.1 Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників GPS і ГЛОНАСС Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників GPS і ГЛОНАСС. к бл.7 кбл.П кбл.8 / ч кбл.7 \ / 12 кбл, 10 Q 16 із к бл.2 І 15 Q кбл.7 14 І рйм^ 18 кбл.5 Фіг.З кбл.8 Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників GPS і ГЛОНАСС. от бл.6 отбл. Фіг.4 Спосіб та пристрій повністю апаратної обробки радіосигналів кбл.6 І кбл.7 Кбл.6 Q навігаційних супутників GPS і ГЛОНАСС. Фіг.5 Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників GPS і ГЛОНАСС, бл.9 кбл.10 ч от бл.8 40 кбл.7 \ 41 ФІГ.6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for completely apparatus processing radio-signals of navigation satellites gps and glonass
Автори англійськоюBorsuk Oleh Anatoliiovych, Dubinko Yurii Serhiiovych, Kyrychenko Oleksandr Ivanovych, Lukianenko Mykola Vasyliovych
Назва патенту російськоюСпособ и устройство полностью аппаратной обработки радиосигналов навигационных спутников gps и глонасс
Автори російськоюБорсук Олег Анатолиевич, Дубинко Юрий Сергеевич, Кириченко Александр Иванович, Лукьяненко Николай Васильевич
МПК / Мітки
Мітки: апаратної, обробки, пристрій, повністю, супутників, навігаційних, спосіб, глонасс, радіосигналів
Код посилання
<a href="https://ua.patents.su/17-31662-sposib-ta-pristrijj-povnistyu-aparatno-obrobki-radiosignaliv-navigacijjnikh-suputnikiv-gps-i-glonass.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників gps і глонасс</a>
Селектор радіосигналів точного часу
Номер патенту: 18810
Опубліковано: 25.12.1997
Автори: Лавров Геннадій Миколайович, Ванько Володимир Михайлович, Дороніна Ольга Михайлівна
МПК: G04C 11/00
Мітки: радіосигналів, точного, часу, селектор
Формула / Реферат:
Селектор радиосигналов точного времени, содержащий последовательно соединенные узкополосный фильтр, амплитудный детектор, усилитель, селектор по частоте повторения пачек импульсов, элемент ИЛИ и счетчик сигналов, отличающийся тем, что введен селектор числа импульсов в пачке, при этом, вход селектора числа импульсов в пачке соединен со входом селектора по частоте повторения пачек импульсов, дополнительный выход которого соединен со входом...
Селектор радіосигналів точного часу
Номер патенту: 32165
Опубліковано: 15.12.2000
Автор: Токарев Владислав Олегович
МПК: G04C 11/00
Мітки: точного, часу, селектор, радіосигналів
Текст:
...на частоту сигналів точного часу - 1000 Гц, підключений до радіомережі Через нього сигнали точного часу проходять на вхід триггера Шмітта 2, який здійснює амплітудне детектування сигналу, відсіюючи шуми та перешкоди, а також перетворює аналогові сигнали на цифрові, формуючи їх фронти та доводячи їх амплітуду до рівня логічної одиниці. Далі цифровий сигнал попадає на вхід цифрового пертворювача 3, який аналізує сигнал і в момент...
Спосіб формування навколо землі компланарної групи штучних супутників землі
Номер патенту: 26787
Опубліковано: 12.11.1999
Автори: Абросімов Микола Миколайович, Малков Андрій Борисович, Конишева Галина Миколаївна
МПК: B64G 9/00
Мітки: компланарної, землі, групи, супутників, формування, штучних, спосіб
Формула / Реферат:
1. Спосіб формування навколо Землі компланарної групи штучних супутників Землі, у відповідності з яким визначають параметри орбіт, порядок та засоби виведення на них заданого числа H штучних супутників Землі, виводять їх на розрахункові орбіти, під час виведення цим штучним супутникам Землі задають параметри виведення, які забезпечують компланарне розміщення центрів мас усіх H штучних супутників Землі навколо Землі у межах спільної площини,...
Пристрій для розділення радіосигналів по несучій частоті

Номер патенту: 13572
Опубліковано: 25.04.1997
Автори: Гордієнко Анатолій Аркадійович, Приймак Іван Андрійович, Ясинський Валентин Леонтійович
МПК: H04B 1/10
Мітки: радіосигналів, частоти, розділення, несучий, пристрій
Пристрій для обробки волокна тваринного походження та пристрій для обробки вовни
Номер патенту: 26182
Опубліковано: 07.06.1999
Автор: ХОПКІНС Петер Стюарт
Мітки: пристрій, волокна, походження, вовни, обробки, тваринного
Формула / Реферат:
1. Устройство для обработки волокна животного происхождения, содержащее бак с растворителем с входной и выходной зонами, средство для подачи волокна в бак, расположенную в баке с растворителем бесконечную ленту конвейера с приподнятым участком для транспортирования волокна через бак, расположенные в баке средства для разбрызгивания растворителя под давлением для очистки волокна во время его перемещения через бак на бесконечной ленте конвейера...
Попередній патент: Спосіб контролю працездатності радіоелектронних пристроїв
Наступний патент: Пневматична форсунка
Випадковий патент: Спосіб оцінки потреби у лікувально-профілактичній допомозі хворим на генералізований пародонтит