Спосіб контролю працездатності радіоелектронних пристроїв
Номер патенту: 31661
Опубліковано: 15.12.2000
Автори: Власюк Віктор Миколайович, Власюк Володимир Миколайович


Формула / Реферат
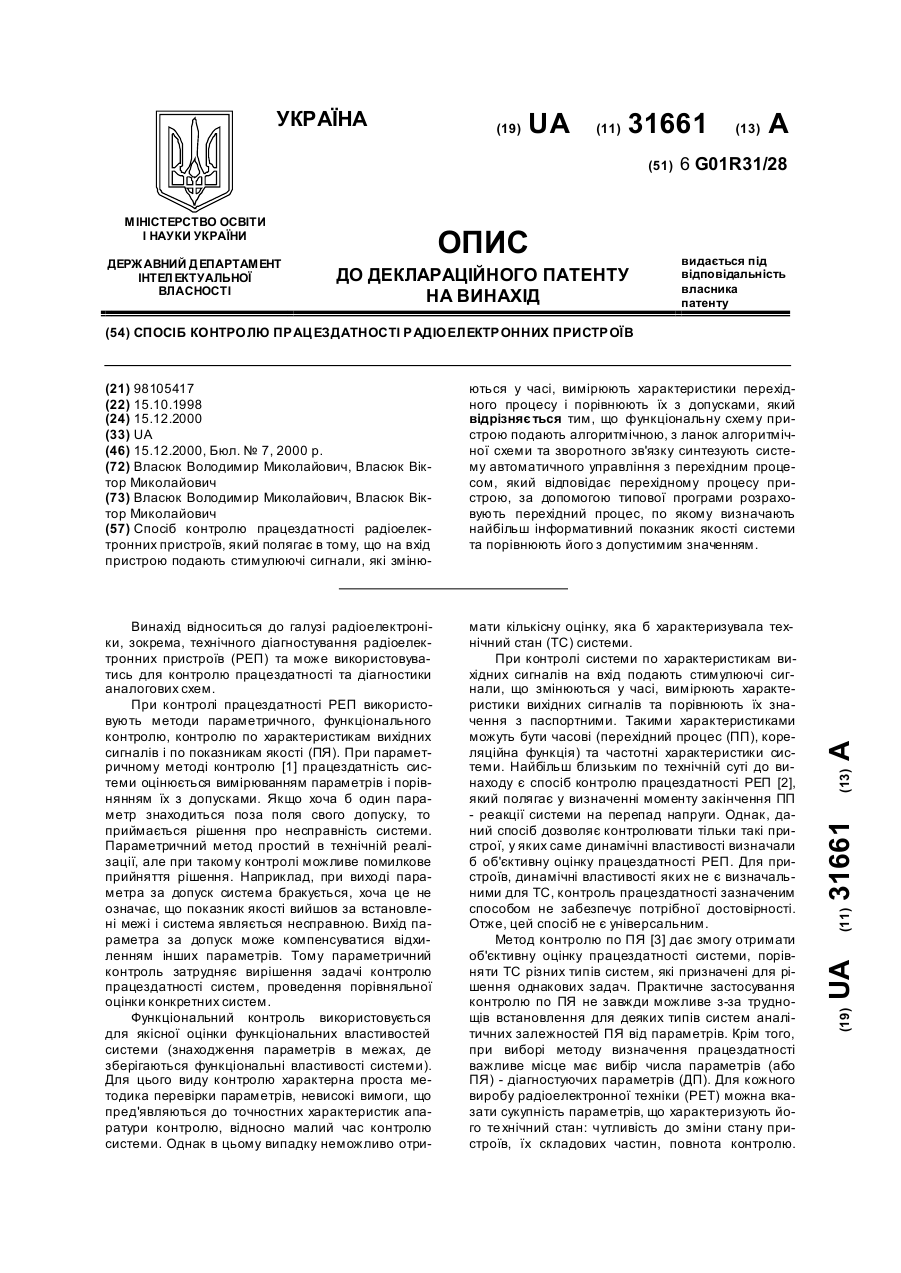
Спосіб контролю працездатності радіоелектронних пристроїв, який полягає в тому, що на вхід пристрою подають стимулюючі сигнали, які змінюються у часі, вимірюють характеристики перехідного процесу і порівнюють їх з допусками, який відрізняється тим, що функціональну схему пристрою подають алгоритмічною, з ланок алгоритмічної схеми та зворотного зв'язку синтезують систему автоматичного управління з перехідним процесом, який відповідає перехідному процесу пристрою, за допомогою типової програми розраховують перехідний процес, по якому визначають найбільш інформативний показник якості системи та порівнюють його з допустимим значенням.
Текст
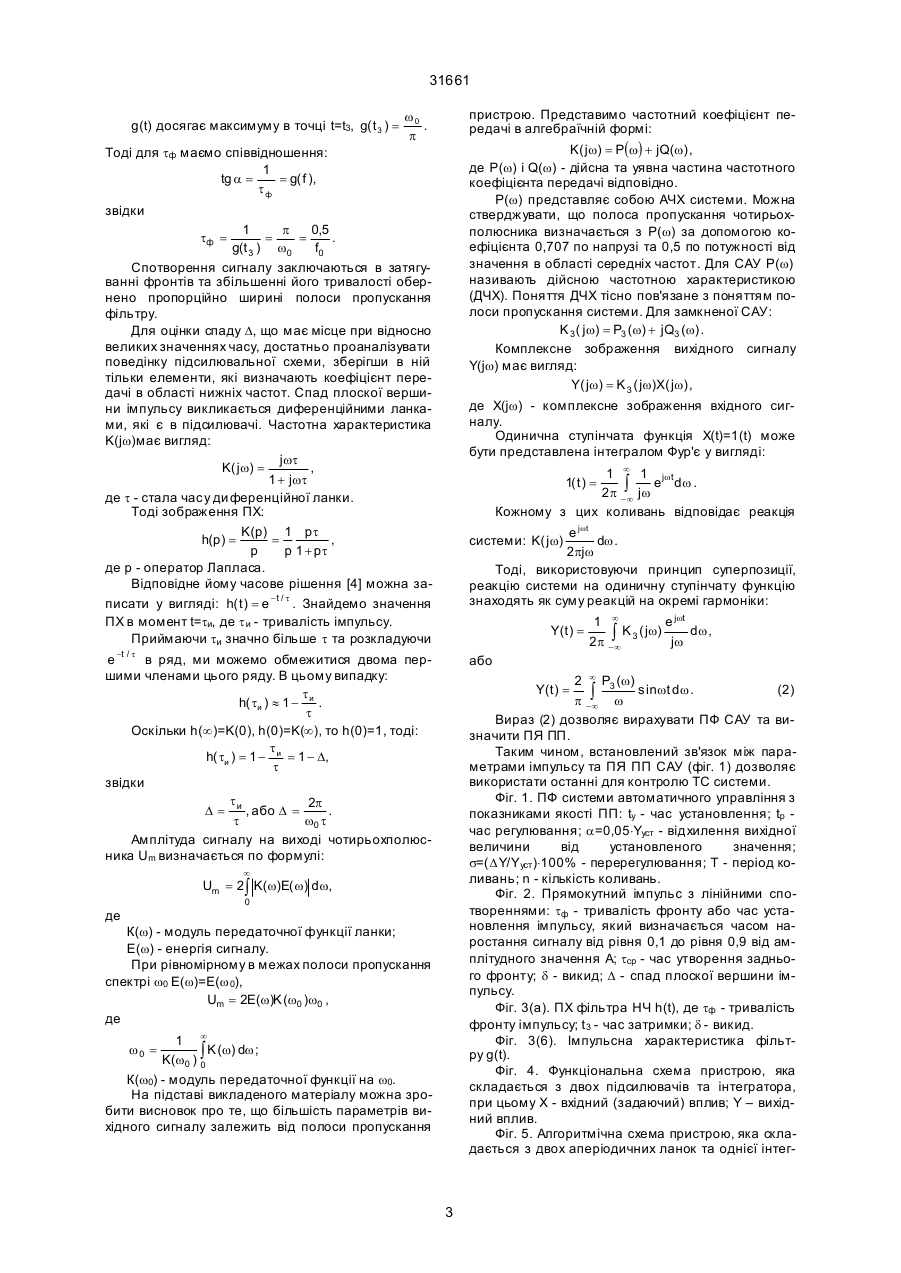
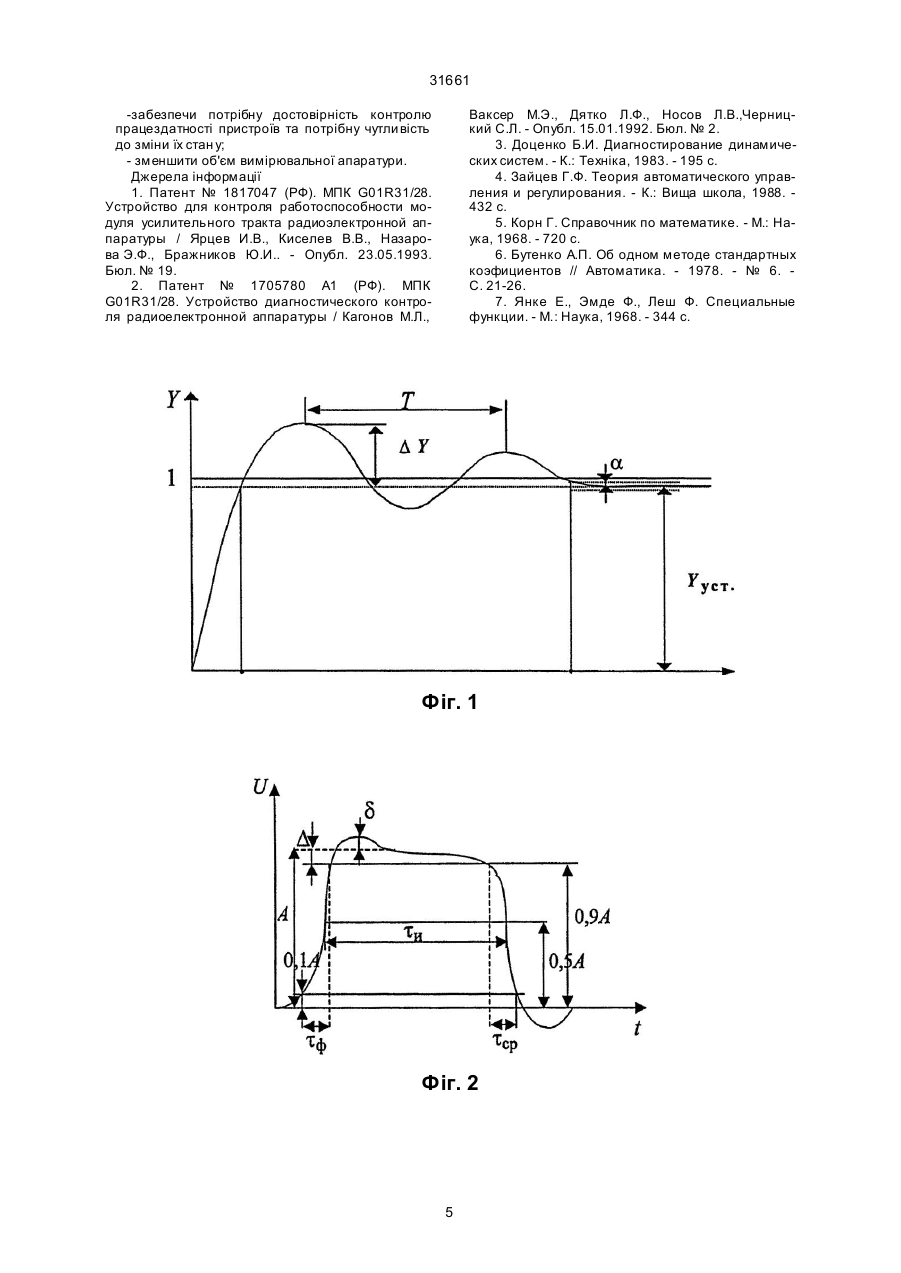
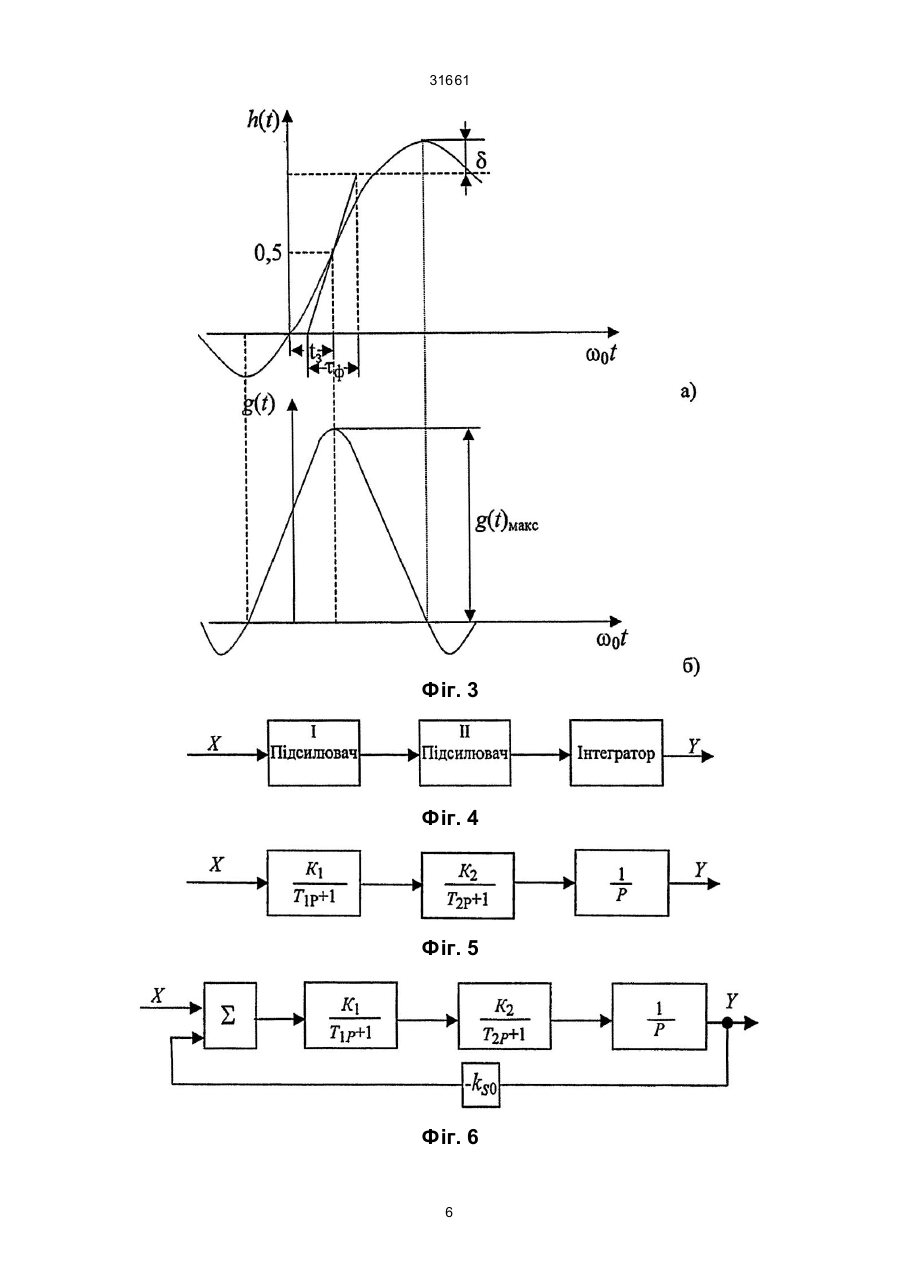
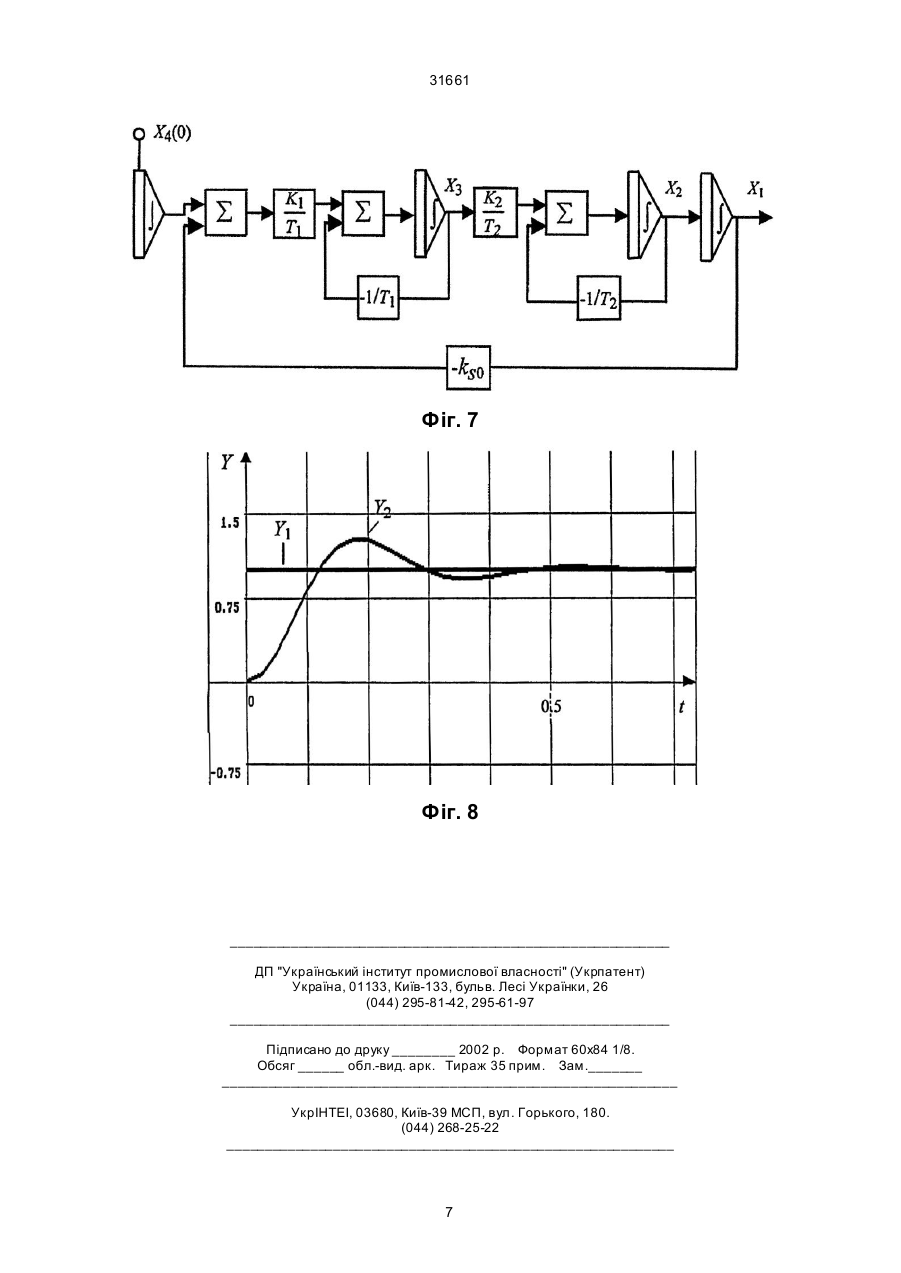
Спосіб контролю працездатності радіоелектронних пристроїв, який полягає в тому, що на вхід пристрою подають стимулюючі сигнали, які зміню 31661 фронту, tф »tср, коли тривалість імпульсу tи в 23 рази перевищує час наростання; d - викид; D спад плоскої вершини імпульсу. Всі основні спотворення імпульсу скінченої тривалості можна отримати безпосередньо з перехідної характеристики (ПХ) h(t) підсилювача. Встановимо зв'язок ПХ підсилювача з його амплітудно-частотною характеристикою (АЧХ). Для цього використаємо другий вид часової характеристики лінійної ланки – імпульсну характеристику (IX) g(t). Між часовими характеристиками h(t) та g(t) існує лінійний зв'язок: При виборі ДП необхідно пам'ятати, що їх визначення пов'язане з економічними затратами, тому цю сук упність ДП слід мінімізувати, зменшуючи її інформаційну надлишковість при збереженні певної якості контролю працездатності (повноти контролю, достовірності, чутливості). В основу винаходу поставлено задачу вдосконалення способу контролю працездатності РЕП шляхом описання електричної схеми пристрою еквівалентною їй системою автоматичного управління (САУ) та дослідження ПЯ ПП, що дозволяє об'єктивно визначити працездатність будь-якого аналогового РЕП, скоротити число ДП, що розраховують, до одного при збереженні необхідної якості контролю. Степінь працездатності доцільно визначити сукупністю такого числа параметрів, контроль яких дозволяє достатньо повно представити процес зміни ТС пристрою. В результаті експериментальних досліджень встановлено, що ПЯ ПП сильно корельовані між собою. Тому при контролі працездатності пристроїв шляхом представлення електричної схеми САУ виникає можливість використати один ПЯ, що несе максимум інформації про стан системи та відповідає вимогам повноти контролю та чутливості до зміни її стану. ПЯ визначають при оцінці реакції системи на типовий та найбільш несприятливий вплив у вигляді одиничної ступінчатої функції h(t)=1(t). Реакцію системи Y(t) на даний вплив називають перехідною функцією (ПФ) системи (фіг. 1). До ПЯ ПП в загальному випадку відносять: час установлення ty; час регулювання tp, відхилення вихідної величини від установленого значення a=0,05×Yуст; перерегулювання s=(DY/Yycт.)×100%; період коливань Т; кількість коливань n [3]. Порядок рішення задачі: 1. Пристрій, що контролюється, подають функціональною схемою. 2. Функціональну схему подають алгоритмічною схемою. 3. З ланок алгоритмічної схеми та зворотного зв'язку (33) синтезують САУ з заданим ПП. 4. За допомогою типової програми розраховують ПП, по якому визначають ПЯ системи. Для контролю працездатності системи вибирають найбільш інформативний показник (або показник, значення якого на ділянці часу, що контролюється, змінюється найбільше). Розглянемо залежність ПЯ ПП САУ від параметрів пристрою, що контролюється, та можливість використання цієї залежності для контролю ТС системи. Для прикладу використаємо параметри вихідних сигналів імпульсного підсилювача – амплітуду, тривалість імпульсів, тривалість переднього та заднього фронтів, скол вершини. Більшість з цих параметрів представляють собою лінійні (перехідні) спотворення (фіг. 2), адже при підсиленні імпульсних сигналів на виході підсилювача спостерігається ПП, оскільки сам імпульс складається з ділянок, що чергуються з різними значеннями похідних (швидкостей зміни). На фіг. 2 зображено прямокутний імпульс з лінійними спотвореннями: tф - тривалість фронту або час установлення імпульсу, який визначається часом наростання сигналу від рівня 0,1 до рівня 0,9 від амплітудного значення А; tс р - час утворення заднього dh(t ) ¥ (1) ; ò g(t )dt = h( t ). dt -¥ IX g(t) пов'язана з комплексною функцією K(jw) ланки оберненим перетворенням Фур'є: g( t ) = g( t ) = 1 ¥ K( jw) e jwt dw , 2p -ò ¥ де j - уявна одиниця; w - циклічна частота, рад./с. Таким чином, між АЧХ і ПХ існує однозначний зв'язок. Для того, щоб оцінити залежність параметрів сигналу від ширини пропускання чотирьохполюсника, ідеалізуємо задачу і розглянемо в якості моделі подібного широкополосного пристрою ідеальний фільтр низької частоти. Для визначення ПХ необхідно на вхід системи подати одиничний скачок напруги h(t), аналітичний вираз якого заданий формулою: 1 1 ¥ sinwt h(t ) = + ò dw. 2 p0 w Всі компоненти спектру вхідного сигналу до частоти w0 пропускаються системою без спотворень та кожна з них запізнюється на час t3. За межами полоси пропускання коефіцієнт передачі дорівнює нулю. Таким чином, ПХ системи: w 1 1 0 sinw(t - t 3 ) + ò dw = 2 p 0 w 1 1 = + Si[w0 (t - t 3 )]. 2 p ПХ, що визначається цим рівнянням зображена на фіг. 3(а). Оскільки графік h(t) є функцією безрозмірного часу w0t, то по яким би рівням сигналу ми не визначали б тривалість процесу наростання tф , вона однозначно визначається тільки полосою пропускання w0. Для спрощення визначимо tф по точкам перетину дотичної лінії нульового та втановленого значення сигналу. Дотичну візьмемо в точці максимальної крутизни h(t). Згідно виразу (1) похідна ПХ є IX системи. h( t ) = g( t ) = dh( t ) 1 w 0 1 d = ò [sinw( t - t 3 )]dw = dt p 0 w dt 1 w0 sinw0 (t - t 3 ) cos w(t - t 3 )dw = . pò p(t - t 3 ) 0 Графік g(t) зображений на фіг. 3(б). Ширина першої арки може бути взята як тривалість вихідного сигналу, оскільки в ній зосереджена майже вся енергія: 2p tи = . w0 = 2 31661 g(t) досягає максимуму в точці t=t3, g( t 3 ) = пристрою. Представимо частотний коефіцієнт передачі в алгебраїчній формі: K( jw) = P(w) + jQ(w) , де Р(w) і Q(w) - дійсна та уявна частина частотного коефіцієнта передачі відповідно. P(w) представляє собою АЧХ системи. Можна стверджувати, що полоса пропускання чотирьохполюсника визначається з P(w) за допомогою коефіцієнта 0,707 по напрузі та 0,5 по потужності від значення в області середніх частот. Для САУ Р(w) називають дійсною частотною характеристикою (ДЧХ). Поняття ДЧХ тісно пов'язане з поняттям полоси пропускання системи. Для замкненої САУ: K 3 ( jw) = P3 (w) + jQ3 (w) . Комплексне зображення вихідного сигналу Y(jw) має вигляд: Y( jw) = K 3 ( jw)X( jw) , де X(jw) - комплексне зображення вхідного сигналу. Одинична ступінчата функція X(t)=1(t) може бути представлена інтегралом Фур'є у вигляді: w0 . p Тоді для tф маємо співвідношення: 1 tg a = = g( f ), tф звідки 1 p 0,5 = = . g(t 3 ) w0 f0 Спотворення сигналу заключаються в затягуванні фронтів та збільшенні його тривалості обернено пропорційно ширині полоси пропускання фільтру. Для оцінки спаду D, що має місце при відносно великих значеннях часу, достатньо проаналізувати поведінку підсилювальної схеми, зберігши в ній тільки елементи, які визначають коефіцієнт передачі в області нижніх частот. Спад плоскої вершини імпульсу викликається диференційними ланками, які є в підсилювачі. Частотна характеристика K(jw)має вигляд: jwt K( jw) = , 1 + jwt де t - стала часу ди ференційної ланки. Тоді зображення ПХ: K(p) 1 pt h(p) = = , p p 1 + pt де р - оператор Лапласа. Відповідне йому часове рішення [4] можна записати у вигляді: h( t ) = e - t / t . Знайдемо значення ПХ в момент t=tи, де t и - тривалість імпульсу. Приймаючи tи значно більше t та розкладуючи e -t / t в ряд, ми можемо обмежитися двома першими членами цього ряду. В цьому випадку: t h( tи ) » 1 - и . t Оскільки h(¥)=K(0), h(0)=K(¥), то h(0)=1, тоді: t h( tи ) = 1 - и = 1 - D, t звідки t 2p D = и , або D = . t w0 t Амплітуда сигналу на виході чотирьохполюсника Um визначається по формулі: tф = 1 ¥ 1 jw t e dw . 2p -ò jw ¥ Кожному з цих коливань відповідає реакція e jwt системи: K( jw) dw . 2 pj w Тоді, використовуючи принцип суперпозиції, реакцію системи на одиничну ступінчату функцію знаходять як суму реакцій на окремі гармоніки: 1( t ) = Y(t ) = 1 ¥ e jwt ò K 3 ( jw) jw dw , 2p - ¥ або 2 ¥ P3 (w) sinwt dw . (2) p -ò w ¥ Вираз (2) дозволяє вирахувати ПФ САУ та визначити ПЯ ПП. Таким чином, встановлений зв'язок між параметрами імпульсу та ПЯ ПП САУ (фіг. 1) дозволяє використати останні для контролю ТС системи. Фіг. 1. ПФ системи автоматичного управління з показниками якості ПП: ty - час установлення; tp час регулювання; a=0,05×Yуст - відхилення вихідної величини від установленого значення; s=(DY/Yуст)×100% - перерегулювання; Т - період коливань; n - кількість коливань. Фіг. 2. Прямокутний імпульс з лінійними спотвореннями: tф - тривалість фронту або час установлення імпульсу, який визначається часом наростання сигналу від рівня 0,1 до рівня 0,9 від амплітудного значення А; tср - час утворення заднього фронту; d - викид; D - спад плоскої вершини імпульсу. Фіг. 3(а). ПХ фільтра НЧ h(t), де tф - тривалість фронту імпульсу; t 3 - час затримки; d - викид. Фіг. 3(6). Імпульсна характеристика фільтру g(t). Фіг. 4. Функціональна схема пристрою, яка складається з двох підсилювачів та інтегратора, при цьому X - вхідний (задаючий) вплив; Y – вихідний вплив. Фіг. 5. Алгоритмічна схема пристрою, яка складається з двох аперіодичних ланок та однієї інтегY(t ) = ¥ Um = 2ò K(w)E( w) dw, 0 де К(w) - модуль передаточної функції ланки; Е(w) - енергія сигналу. При рівномірному в межах полоси пропускання спектрі w0 Е(w)=Е(w 0), Um = 2E(w)K (w0 )w0 , де 1 ¥ K (w) dw ; K(w0 ) ò 0 К(w0) - модуль передаточної функції на w0. На підставі викладеного матеріалу можна зробити висновок про те, що більшість параметрів вихідного сигналу залежить від полоси пропускання w0 = 3 31661 руючої з параметрами: T1=0,001 с., Т2=0,004 с., K1=5, K2=50. Фіг. 6. Синтезована САУ, яка складається з суматора, двох аперіодичних ланок та однієї інтегруючої, ЗЗ з коефіцієнтом k0s=-72,178. Фіг. 7. Розширена схема в змінних стану, яка складається з чотирьох інтеграторів, трьох суматорів та п'яти пропорційних ланок; Т1, Т2 - сталі часу; К 1, K 2 - коефіцієнти підсилення; k0s - коефіцієнт ЗЗ; Xi - змінні стану. На фіг. 8 зображені результати розрахунків у вигляді графіка, де Y1(t) - вхідний вплив, Y2(t) – вихідний вплив. Розглянемо можливість контролю ТС РЕП запропонованим способом на прикладі функціональної схеми, що складається з двох підсилювачів та інтегратора, де X - вхідний (задаючий) вплив; Y – вихідний вплив (Фіг. 4). Алгоритмічна схема цього пристрою зображена на фіг. 5, де підсилювачі представляють собою аперіодичні ланки з передаK точною функцією , а інтегратор – інтегруючу Tp + 1 1 ланку з передаточною функцією . Для синтезу P САУ з заданим ПП з врахуванням специфіки рішення задачі визначення працездатності приладів необхідно синтезувати тільки головний ЗЗ. Тобто, маємо вихідну алгоритмічну схему (фіг. 5), у якої структура та параметри основних функціонально необхідних елементів відомі. Потрібно визначити передаточну функцію, схему та параметри ЗЗ, включення якого забезпечить отримання потрібних ПЯ ПП САУ. Пропонується синтез САУ з заданим ПП методом стандартних коефіцієнтів [5]. Проведемо синтез характеристичного поліному для системи третього порядку r=3: 1. Задаємо перерегулювання s=25% та час ПП tp=0,5 с; 2. З графіку [5] визначаємо величину приведеного декременту затухання z=0,5, яка відповідає заданому s; 3. По формулі x=z-0,0167(r-2) вираховуємо декремент затухання x=0,4833 (при z=0,5, r=3). 4. По формулі: n= Коефіцієнти ks1 та ks 2 не вирахо вуємо, адже для рішення нашої задачі необхідно синтезувати тільки головний ЗЗ, а коефіцієнтами місцевих ЗЗ ks1 та ks 2 нехтуємо. Динаміку системи досліджуємо при одиничному задаючому впливові x(t)=1. Розширена схема в змінних стан у представлена на фіг. 7 і складається з інтеграторів, суматорів та пропорційних ланок, у яких T1 , Т 2 - сталі часу; K1 , K2 – коефіцієнти підсилення; k0s - коефіцієнт ЗЗ; Хі - змінні стану. З схеми в змінних стану отримуємо рівняння стану досліджуваної системи з врахуванням задаючого впливу: X1=0×X1+1×X2+0×X3+0×X4; X2=0×X1-1/T2×X2+K2 /T2×X3+0×X4; X3=-ks 0×K1 /T 1×X1+0×X2-1/T 1×X3+ks 0K1 /T1×X4; X4=0×X1+0×X2+0×X3+0×X4. Отже, розширена матриця коефіцієнтів Ар має вигляд: é 0 1 0 0 ù ê ú 1 K2 0 0 ê ú T2 T2 ú Ap = ê ê K1 1 K1 ú 0 k s0 ê - k s0 ú T1 T1 T1 ú ê ê 0 0 0 0 ú ë û Задаємо вектор виходу Y: задаючий вплив Y1= Х4; ви хідний вплив Y2=Х1. По розширеній схемі в змінних стану отримуємо систему рівнянь для визначення складових вектору ви ходу: Y1=0×X1+0×X2+0×X3+1×X4; Y2=1×X1=0×X2+0×X3+0×X4. Отже, розширена матриця виходу С р має вигляд: 0 0 0 1 ù Cp = é ê 10 0 0 ú. ë û Підставляючи численні значення параметрів досліджуваної системи, отримуємо матриці Ар та Ср: 0 1 0 0 ù é ê 0 - 250 12500 0 ú Ap = ê , - 360890 0 - 1000 360890ú ê 0 0 0 0 ú ë û ( r! - 1,0459) x 0 0 0 1 ù Cp = é ê 10 0 0 ú. ë û Результати розрахунків у вигляді графіка приведені на фіг. 8. Для оцінки працездатності системи використовують Y2(t), при цьому для аналізу вибирають один найбільш інформативний параметр - час регулювання tр. В результаті досліджень встановлено, що при зміні tp менше, ніж на 25% система працездатна, в протилежному разі приймають рішення про непрацездатність системи. Таким чином, представлення схеми РЕП еквівалентною їй САУ являється достатньо ефективним методом контролю ТС пристроїв. Даний метод дає змогу: - визначати працездатність будь-якого аналогового РЕП; - скоротити число вимірювальних параметрів до одного; - суттєво зменшити час на визначення працездатності пристроїв; r 1 - 10459 x , вираховуємо число накладених на систему кінцевих умов n=0,7528 (при x=0,4133, r=3). 5. По формулі 0,3242(r + n - 1)t p DT = , 6 nr 3 при r=3, n=0,7528, tp=0,5 с вираховуємо "жорсткість" управління DT=0,27 с. 6. Якість ПФ системи визначається коефіцієнтами ЗЗ, які в свою чергу залежать від n. По формулі r - j- 1 1 k sj = (r - i )(n + i ), r-j å (r - j )! T i=0 де j=0,1..., r-1, приведеної за допомогою гамафункцій [6], вираховуємо коефіцієнт характеристичного поліному. При r=3, DT=0,27, j=0, 1, 2, .., ks0=72,178. 4 31661 -забезпечи потрібну достовірність контролю працездатності пристроїв та потрібну чутли вість до зміни їх стан у; - зменшити об'єм вимірювальної апаратури. Джерела інформації 1. Патент № 1817047 (РФ). МПК G01R31/28. Устройство для контроля работоспособности модуля усилительного тракта радиоэлектронной аппаратуры / Ярцев И.В., Киселев В.В., Назарова Э.Ф., Бражников Ю.И.. - Опубл. 23.05.1993. Бюл. № 19. 2. Патент № 1705780 А1 (РФ). МПК G01R31/28. Устройство диагностического контроля радиоелектронной аппаратуры / Кагонов М.Л., Ваксер М.Э., Дятко Л.Ф., Носов Л.В.,Черницкий С.Л. - Опубл. 15.01.1992. Бюл. № 2. 3. Доценко Б.И. Диагностирование динамических систем. - К.: Техніка, 1983. - 195 с. 4. Зайцев Г.Ф. Теория автоматического управления и регулирования. - К.: Вища школа, 1988. 432 с. 5. Корн Г. Справочник по математике. - М.: Наука, 1968. - 720 с. 6. Бутенко А.П. Об одном методе стандартных коэфициентов // Автоматика. - 1978. - № 6. С. 21-26. 7. Янке Е., Эмде Ф., Леш Ф. Специальные функции. - М.: Наука, 1968. - 344 с. Фіг. 1 Фіг. 2 5 31661 Фіг. 3 Фіг. 4 Фіг. 5 Фіг. 6 6 31661 Фіг. 7 Фіг. 8 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of working capacity of radioelectronic devices
Автори англійськоюVlasiuk Volodymyr Mykolaiovych, Vlasiuk Viktor Mykolaiovych
Назва патенту російськоюСпособ контроля работоспособности радиоэлектронных устройств
Автори російськоюВласюк Владимир Николаевич, Власюк Виктор Николаевич
МПК / Мітки
МПК: G01R 31/28
Мітки: спосіб, контролю, радіоелектронних, пристроїв, працездатності
Код посилання
<a href="https://ua.patents.su/7-31661-sposib-kontrolyu-pracezdatnosti-radioelektronnikh-pristrov.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю працездатності радіоелектронних пристроїв</a>
Пристрій для контролю працездатності дефектоскопів
Номер патенту: 6600
Опубліковано: 29.12.1994
Автори: Погудін Олександр Іванович, Волинський Аркадій Федорович, Пащенко Анатолій Васильович, Овсейко Леонід Георгійович, Гражданов Ігор Костянтинович, Довженко Володимир Профирович
МПК: G01N 27/82
Мітки: пристрій, контролю, дефектоскопів, працездатності
Формула / Реферат:
(57) 1. Устройство для контроля работоспособности дефектоскопов, содержащее измерительный блок, предназначенный для связи с контролируемым дефектоскопом, имитатор дефектов, соединенный с измерительным блоком, отличающееся тем, что имитатор содержит синхронизированный генератор импульсов прямоугольной и треугольной формы, источник питания, резистор, два счетчика, два логических элемента НЕ, два ключа, коммутирующий узел, кнопку...
Пристрій для контролю працездатності порошкового вогнегасника
Номер патенту: 11604
Опубліковано: 25.12.1996
Автори: Філімонов Сергій Генадійович, Паращевін Віктор Федорович, Дімант Давид Рувимович, Чарков Віктор Павлович, Москаленко Ніл Тарасович, Циганков Юрій Павлович
МПК: A62C 37/00
Мітки: порошкового, контролю, працездатності, вогнегасника, пристрій
Формула / Реферат:
1. Устройство для контроля работоспособности порошкового огнетушителя, содержащее последовательно установленные в полости сосуда с порошком и заключенные в корпусе эластичную диафрагму и прозрачную смотровую линзу, отличающееся тем, что, с целью расширения технологических возможностей за счет применения в огнетушителях со сжатым газом, находящимся в баллонах, они имеют установленный между эластичной диафрагмой и смотровой линзой диск,...
Пристрій контролю працездатності гетеродинного радіоприймального каналу
Номер патенту: 14309
Опубліковано: 25.04.1997
Автори: Белкін Володимир Володимирович, Косінський Олексій Сергійович
МПК: G01R 23/00
Мітки: гетеродинного, каналу, пристрій, контролю, радіоприймального, працездатності
Формула / Реферат:
Устройство для контроля работоспособности гетеродинного радиоприемного канала, содержащее смеситель, выход которого является контрольным входом контролируемого гетеродинного радиоприемного канала, гетеродинный выход которого подключен к первому входу смесителя, отличающееся тем, что, с целью повышения достоверности контроля путем оценки переходных характеристик автоколебательного режима, в него введены последовательно соединенные...
Пристрій для контролю функціональної надійності силових комутаційних пристроїв
Номер патенту: 28039
Опубліковано: 16.10.2000
Автори: Хільперт Йоханнес, Райнерт Вернер, Ангер Нільс
МПК: H02H 11/00, H01H 33/66, H01H 33/00, G01R 31/00, G01R 31/327, H01H 11/00
Мітки: пристроїв, комутаційних, пристрій, силових, надійності, контролю, функціонально
Текст:
...Вопервых, измеряется текущий через двигатель ток двигателя для завода пружинного привода и, вовторых, измеряется сформированный преобразователем тока ток катушки Собственно устройство определения тока состоит в основном из двух частей собственно преобразователя тока и узла согласования сигналов, содержащего фильтр для исключения появляющихся при некоторых обстоятельства х напряжений помех При этом сформированный преобразователем тока выходной...
Спосіб контролю систем управління ракет
Номер патенту: 31113
Опубліковано: 15.12.2000
Автори: Косовенко Євген Вікторович, Семенов Леонід Антонович, Доценко Борис Іванович, Кузьмін В'ячеслав Павлович
МПК: G05B 23/02
Мітки: ракет, спосіб, контролю, управління, систем
Формула / Реферат:
Спосіб контролю систем управління ракет, який полягає у дії керуючого сигналу на вхід контрольованої системи, імітації ракети, як об’єкта управління, визначенні як інформативного параметра промаху ракети, що відрізняється тим, що керуючий сигнал формують залежно від поточного відхилення ракети від заданих координат, а параметри ракети, як об'єкта управління, змінюють у часі згідно з заданим законом.