Спосіб перетворення кінетичної енергії потоку текучого середовища у корисну роботу і пристрій для його здійснення
Формула / Реферат
1. Спосіб перетворення кінетичної енергії потоку текучого середовища в корисну роботу, що включає розміщення робочого елемента в потоці текучого середовища і надання йому одночасно гармонійних обертального і зворотно-поступального переміщень, передачу вироблюваної енергії від робочого елемента до пристрою для відбору потужності, який відрізняється тим, що робочий елемент закріплюють у потоці текучого середовища консольно, при цьому обертальні переміщення робочого елемента здійснюють відносно осі їхнього консольного закріплення, а зворотно-поступальні переміщення робочого елемента здійснюють із постійними амплітудами у напрямку, перпендикулярному напрямку переміщення потоку, що співпадає з вектором нормальної складової рушійної сили потоку, результуюча складова якої спрямована перпендикулярно бічної поверхні робочого елемента.
2. Спосіб за п. 1, який відрізняється тим, що в потоці текучого середовища встановлюють одночасно два і більше робочих елементів з можливістю регулювання зсуву по фазі один відносно одного, яким надають автономні гармонійні обертальне і зворотно-поступальне переміщення.
3. Спосіб п. 2, який відрізняється тим, що кінематичний зв'язок між робочими елементами здійснюють за допомогою передавальних механізмів.
4. Пристрій для перетворення кінетичної енергії потоку текучого середовища в корисну роботу, що містить робочий елемент, зв'язаний із шатуном, установленого на нерухомій основі кривошипно-шатунного механізму, повзун якого кінематично з'єднаний із шатуном і має можливість зворотно-поступального переміщення по напрямній, а шатун протилежним кінцем шарнірно з'єднаний з одним кінцем кривошипа, протилежний кінець якого встановлений на цій же нерухомій основі з можливістю повороту, а також пристрій для відбору потужності, який відрізняється тим, що робочий елемент виконаний у вигляді консолі, закріпленої одним своїм кінцем на шатуні і встановлений з можливістю фіксованого повороту і обертального переміщення відносно осі, на якій він закріплений, що співпадає з віссю з’єднання повзуна із шатуном, при цьому робочий елемент, має можливість зворотно-поступального переміщення у напрямку, перпендикулярному напрямку переміщення потоку, що співпадає з вектором нормальної складової рушійної сили потоку, результуюча складова якої спрямована перпендикулярно бічної поверхні робочого елемента, а шатун протилежним кінцем шарнірно з’єднаний з одним кінцем кривошипа, інший кінець шатуна призначений для передачі енергії обертання кривошипа на пристрій для відбору потужності.
5. Пристрій за п. 4, який відрізняється тим, що він виконаний багатомодульним і складається з декількох аналогічних описаним у п. 4 пристроїв, кінематичний зв'язок між модулями здійснено за допомогою передавальних механізмів, розміщених на валу з однієї або протилежної сторони відносно нерухомої основи.
6. Пристрій за п. 4, який відрізняється тим, що його оснащено підтискним соплом і дифузором, які встановлені, відповідно, перед і за робочими елементами.
Текст
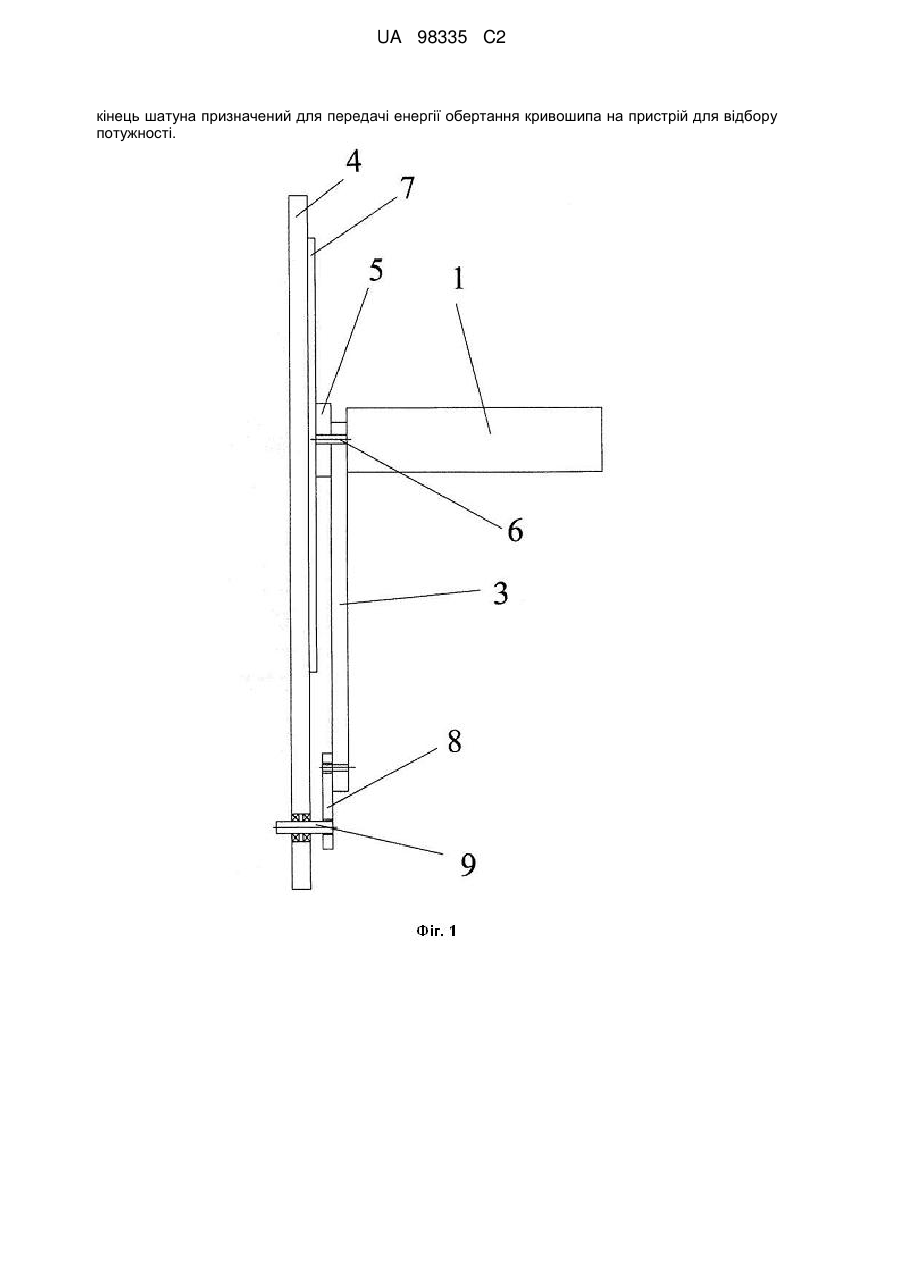
Реферат: Спосіб перетворення кінетичної енергії потоку текучого середовища в корисну роботу включає розміщення робочого елемента в потоці текучого середовища і надання йому одночасно гармонійних обертального і зворотно-поступального переміщень, передачу вироблюваної енергії від робочого елемента до пристрою для відбору потужності. При цьому робочий елемент закріплюють у потоці текучого середовища консольно, при цьому обертальні переміщення робочого елемента здійснюють відносно осі їхнього консольного закріплення, а зворотно-поступальні переміщення робочого елемента здійснюють із постійними амплітудами у напрямку, перпендикулярному напрямку переміщення потоку, що співпадає з вектором нормальної складової рушійної сили потоку, результуюча складова якої спрямована перпендикулярно бічної поверхні робочого елемента. Пристрій для перетворення кінетичної енергії потоку текучого середовища в корисну роботу містить робочий елемент, зв'язаний із шатуном, установленого на нерухомій основі кривошипно-шатунного механізму, повзун якого кінематично з'єднаний із шатуном і має можливість зворотно-поступального переміщення по напрямній, а шатун протилежним кінцем шарнірно з'єднаний з одним кінцем кривошипа, протилежний кінець якого встановлений на цій же нерухомій основі з можливістю повороту, а також пристрій для відбору потужності. При цьому робочий елемент виконаний у вигляді консолі, закріпленої одним своїм кінцем на шатуні і встановлений з можливістю фіксованого повороту і обертального переміщення відносно осі, на якій він закріплений, що співпадає з віссю з’єднання повзуна із шатуном, при цьому робочий елемент має можливість зворотно-поступального переміщення у напрямку, перпендикулярному напрямку переміщення потоку, що співпадає з вектором нормальної складової рушійної сили потоку, результуюча складова якої спрямована перпендикулярно бічної поверхні робочого елемента, а шатун протилежним кінцем шарнірно з’єднаний з одним кінцем кривошипа, інший UA 98335 C2 (12) UA 98335 C2 кінець шатуна призначений для передачі енергії обертання кривошипа на пристрій для відбору потужності. UA 98335 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винаходи належать до галузі енергетики і можуть використовуватись для перетворення кінетичної енергії потоку текучого середовища, що рухається, такого як вітер, вода, що рухається в струмку, річці, в океанському плині, припливах або в спрямованому потоці, в корисну роботу, а саме для виробітку електроенергії з використанням явища флатера, а також для перетворення механічної (електричної) енергії двигуна в корисну роботу руху транспортних засобів або текучого середовища. Ефективні засоби перетворення поновлюваних енергетичних ресурсів у корисну роботу включає механічні вітряні двигуни (вітрогенератори), що перетворюють кінетичну енергію вітру в механічну енергію з використанням підйомних сил або сил лобового опору і механічні гідравлічні турбіни (гідрогенератори), що перетворюють кінетичну енергію поточної води або потенційну енергію піднятої на висоту запасеної води в механічну енергію. У більшості випадків перетворена в такий спосіб енергія перетворюється в електричну потужність для остаточного розподілу і використання. Недоліками існуючих вітрогенераторів і гідрогенераторів є такі: низький коефіцієнт корисної дії, пов'язаний із втратами на турбулізацію повітряного або водного потоку за робочими елементами; обмежений діапазон швидкісного напору повітряного або водного потоку; наявність перекидаючого моменту і пов'язані із цим труднощі при монтажі вітрогенераторів і гідрогенераторів; екологічні проблеми, пов'язані з будівництвом і експлуатацією вітрогенераторів (високочастотні шуми, радіоперешкоди, порушення екосистеми) або гідрогенераторів (греблі, дамби, порушення екосистеми). Відомий пристрій для перетворення кінетичної енергії потоку текучого середовища в корисну роботу (див. патент США №3995972, МПК F03D 5/06, опубл. 07.12.1976), у якому один або кілька робочих елементів приводяться у зворотно-поступальне переміщення з використанням пристрою зміни кута атаки робочого елемента наприкінці кожного ходу. Недоліком цього пристрою є низька ефективність перетворення кінетичної енергії повітряного потоку у зв'язку із втратами енергії потоку на турбулізацію потоку, подолання механічних зусиль пристроїв, що демпфірують, на гальмування робочих елементів і на механічні зміну кута їхньої атаки наприкінці кожного ходу зворотно-поступального руху оскільки цей пристрій не забезпечує здійснення гармонійних обертальних переміщень робочих елементів і має тільки один степінь вільності. Відомі також технічні рішення (див. патент США №4184805 (Arnold), опубл. 22.01.1980), а також патент США №4347036 (МПК F03D 5/06, опубл. 1982), який являє собою патент, виділений з тієї ж первісної заявки, і що описує пристрій такий самий, що і у патенті США 4184805. У цих патентах розкривається спосіб перетворення кінетичної енергії потоку в корисну роботу за рахунок протифазного руху сусідніх робочих елементів при резонансних коливаннях каскаду робочих елементів, установлених з щонайменше двома степенями вільності на нерухомій рамній конструкції консольно, паралельно один одному, з можливістю генерувати електроенергію. Для порушення резонансних коливань каскаду робочих елементів необхідно розмістити зазначені робочі елементи в каскаді на оптимальній відстані між сусідніми робочими елементами, необхідному для створення умов виникнення резонансних коливань, досягти критичної швидкості потоку і викликати фізичне "збурювання" робочих елементів. Кут атаки робочих елементів установлюється постійним з можливістю його механічного регулювання в потоці. Недоліком описаних винаходів є низька ефективність перетворення кінетичної енергії потоку в корисну роботу, пов'язана з малими амплітудами коливань, із втратами енергії на демпфірування зворотно-поступальних переміщень при зміні напрямку руху, на подолання механічного тертя безлічі коливних механічних деталей, зв'язків, підшипників, тяг, стрижнів і зубчастих передач, що унеможливлює комерційне застосування даних технічних рішень. Відомий також спосіб перетворення кінетичної енергії потоку текучого середовища в корисну роботу і пристрій для його здійснення (див. патент РФ № 2362907, (публікація РСТ: WO 2006/130719 20061207) МПК F03D 5/06, опубл.27.07.2009р.), у якому описаний спосіб, що включає розміщення консольно встановлених робочих елементів (каскаду крил) у потоці текучого середовища в умовах взаємодії з потоком текучого середовища, при цьому робочі елементи встановлюють із щонайменше двома степенями вільності і подають потік текучого середовища для проходження через каскад робочих елементів і збудження флатерних коливань, удосконалення включають установку кожного робочого елемента за допомогою індивідуального підвісного стрижня навісним способом і підтримку всіх зазначених підвісних стрижнів паралельно один одному; підтримують вертикальність і паралельність згаданих робочих елементів, які досягаються за допомогою монтажних засобів забезпечення обертального і поступального руху при жорсткому утриманні робочих елементів вертикальними 1 UA 98335 C2 5 10 15 20 25 30 35 40 45 50 55 60 і паралельними за допомогою двоопорної підвіски кожного крила; робочі елементи з'єднані через зазначені підвісні стрижні з гідравлічним приводом, за допомогою якого здійснюють миттєве керування позиціонуванням зазначених крил за зсувом і кутом нахилу за допомогою зовнішнього контролера для забезпечення точно протифазного руху сусідніх крил і передачі вироблюваної енергії від коливних у флатері крил до акумулятора; передачу руху згаданим робочим елементам здійснюють за допомогою гідравлічного приводу для передачі енергії від них до пристрою для відбору потужності (акумулятору); крім того, здійснюють гідравлічне керування передачею зазначеної енергії від зазначеного гідравлічного приводу до зазначеного акумулятора; забезпечують можливість перетворення зазначеної енергії в електричну потужність; управляють робочими елементами шляхом створення циклічних сил, що відновлюють, і інерційної маси для порушення і підтримки флатера зазначених крил; для реалізації описаного способу використовується пристрій, що містить консольно встановлені робочі елементи, які мають можливість розміщення в потоці текучого середовища для забезпечення щонайменше двох степенів вільності, а також засобу подачі зазначеного потоку текучого середовища для проходження через робочі елементи, безліч підвісних стрижнів, причому кожний робочий елемент установлений на індивідуальному підвісному стрижні у формі консолі паралельно один одному за допомогою засобів їхньої підтримки в такому положенні; крім того, пристрій може містити гнучкий елемент, що має можливість деформуватися під дією тиску, створюваного зазначеним потоком текучого середовища, приєднаний до робочого елемента і проходить уздовж його задньої крайки; можливий варіант пристрою, при якому кожен робочий елемент є самостійним і не пов'язаним із сусідніми для мінімізації лобового опору і вихороутворювання; при іншому варіанті виконання пристрою монтажні засоби для підтримки робочих елементів об'єднані в одне ціле з утворенням легкознімних і відокремлюваних модулів, де кожний модуль є знімним і замінним без припинення роботи сусіднього крила; пристрій може включати двосторонній обертальний виконавчій механізм контролю кута нахилу, розташований усередині двостороннього лінійного виконавчого механізму і насоса таким чином, що рух одного або багатьох робочих елементів, з'єднаних із зазначеним модулем виконавчого механізму і насоса за допомогою одного зі згаданих підвісних стрижнів, забезпечує незалежні і одночасні рухи як по поперечній, так і по обертальній осях; робочі елементи можуть бути виконані із закругленими кінцевими ділянками на передньому краї для мінімізації лобового опору, закрилки, сформовані на їхніх кінцях; гнучкий відділ, що має можливість деформуватись, виконаний уздовж щонайменше задньої крайки для зміни кривизни при граничних кутах нахилу крила. Основним недоліком даного винаходу є низька ефективність перетворення кінетичної енергії потоку в корисну роботу, пов'язана з малою величиною амплітуди коливань робочих елементів, обмеженою можливістю виникнення змушених резонансних коливань сусідніх робочих елементів, обумовлених відстанями між сусідніми робочими елементами, при оптимальній величині яких з'являється можливість виникнення умов резонансного коливання всіх робочих елементів (при наявності і інших складових, таких як щільність і критична швидкість потоку, збіг власних частот коливань робочих елементів із частотними характеристиками потоку, пружні властивості матеріалу, умови закріплення, наявність зовнішніх збурювань і т.д.). Низька ефективність перетворення обумовлена також втратами кінетичної енергії потоку текучого середовища (або втратою швидкості потоку на виході із пристрою в порівнянні зі швидкістю потоку на вході в пристрої), пов'язаними з турбулізацією потоку при його взаємодії з коливними елементами, втратами, пов'язаними із частковим використанням отриманої корисної роботи на демпфірування енергії руху поршнів кожного робочого елемента при зупинці поршнів і зміні напрямку руху, на підтримку паралельності кожного робочого елемента, на установку і підтримку протифазного руху сусідніх робочих елементів, на створення циклічних сил, що відновлюють, для порушення і підтримки резонансних коливань. Закони обертальних і зворотно-поступальних переміщень кожного робочого елемента залежать від нестаціонарних аеродинамічних/гідродинамічних сил і моментів, що виникають при взаємодії коливних робочих елементів з потоком текучого середовища, тому ці переміщення не є гармонійними, закони їх різні, немає повторюваності цих переміщень у часі, їх можна тільки контролювати, але ними практично неможливо управляти. Недоліками цього винаходу є також нестійкість і складність контролю пропонованою коливною резонансною системою, що постійно вимагає зовнішніх збудливих сил, для порушення і підтримки резонансних коливань, що вимагає постійного підстроювання, підналагодження і регулювання кожного параметра кожного коливного робочого елемента як по обертальних переміщеннях, так і по зворотно-поступальних переміщеннях. Падіння кінетичної енергії потоку за робочими елементами, обумовлене турбулізацією потоку при його взаємодії з коливними робочими елементами у випадку порушення 2 UA 98335 C2 5 10 15 20 25 30 35 40 45 50 55 60 резонансних збурювань, унеможливлює нарощування електричної потужності, що знімається, за рахунок розміщення додаткових робочих елементів або пристроїв перед розглянутими працюючими елементами або за ними. Відомий також найбільш близький за технічною суттю до пропонованого, але більш далекий по ефекту, що досягається, від попереднього аналога спосіб перетворення кінетичної енергії потоку текучого середовища в корисну роботу, що включає розміщення робочого елемента в потоці текучого середовища і надання йому одночасно гармонійних обертального і зворотнопоступального переміщень, при цьому робочий елемент закріплюють нерухомо на шатуні під прямим кутом до нього, а перетворення кінетичної енергії потоку текучого середовища в корисну роботу, в даному випадку у механічну енергію руху поршня, здійснюють безпосередньо через робочий елемент і кінець шатуна на поршень. Відомий також найбільш близький до пропонованого за конструктивними особливостями, але більш далекий по ефекту, що досягається від попереднього аналога пристрій для перетворення кінетичної енергії потоку текучого середовища в корисну роботу, що містить робочий елемент, зв'язаний із шатуном, установленого на нерухомій основі кривошипношатунного механізму, призначеного для здійснення обертальних переміщень, зворотнопоступальні переміщення здійснюють за допомогою кривошипно-поршневої групи (при здійсненню роботи з переміщення текучого середовища або перетворенні кінетичної енергії потоку текучого середовища в корисну роботу) або кривошипно-повзунної групи (при здійсненні роботи з переміщення текучого середовища), при цьому повзун кінематично з'єднаний із шатуном і має можливість зворотно-поступального переміщення по напрямній, а шатун протилежним кінцем шарнірно з'єднаний з одним кінцем кривошипа, протилежний кінець якого встановлений на цій же нерухомій основі з можливістю повороту, а також пристрій для відбору потужності, при цьому робочий елемент жорстко закріплений на шатуні під прямим кутом до шатуна, в якості повзуна використано поршень, з хвостовиком якого з'єднаний шатун, обидва кінця кривошипа шарнірно з'єднані з шатуном і з нерухомою основою відповідно, а поршень може передавати енергію динамічного переміщення безпосередньо на пристрій для відбору потужності, а саме на силовий агрегат для перетворення кінетичної енергії потоку текучого середовища в корисну роботу - в механічну енергію руху рідини при використанні як силового агрегату насоса, або в механічну енергію обертання колінчастого вала двигуна внутрішнього згоряння або дизель-генератора при використанні як силового агрегату двигуна внутрішнього згоряння або дизель-генератора. У цьому пристрої також пропонуються варіанти, коли на шатуні закріплені нерухомо два і більше робочих елементів; або на рухливому стрижні, зв'язаному з кінцем шатуна і здійснюючому зворотно-поступальні переміщення, закріплені нерухомо два і більше робочих елементів, які можуть бути зв'язані між собою додатковими зв'язками. Основним недоліком цих способу і пристрою для перетворення кінетичної енергії потоку в корисну роботу є наявність початкового сумарного опору, що виникає при передачі руху динаміки поршнем на силовий агрегат, який складається з опору рідини або газу руху поршня, опору тертя маслознімних і поршневих кілець при русі поршня, а також опір тертя у всіх з'єднаннях передавальних механізмів, що входять у конструкцію будь-якого силового агрегату, що повністю виключає не тільки можливість виникнення автоколивань робочого елемента типу "флатер", але і взагалі якого-небудь переміщення робочого елемента від потоку будь-якої рідини, при цьому висока ймовірність турбулізації потоку за робочим елементом. При нерухомому закріпленні робочого елемента на кінці шатуна виключається можливість виникнення додаткових нестаціонарних сил і моментів, які є визначальним чинником, при якому позитивна робота нестаціонарних аеродинамічних сил по абсолютній величині перевищить завжди негативну роботу сил механічного демпфірування, що є умовою виникнення автоколивань робочого елемента типу "флатер". Наявність гнучкого хвостовика робочого елемента може тільки викликати виникнення додаткових сил і моментів при зміні напрямку зворотно-поступальних переміщень, що неминучо призведе до турбулізації потоку за хвостовиком робочого елемента і додатковій втраті кінетичної енергії самого потоку. Крім цього, наявність гнучкого хвостовика призведе до пульсації потоку в районі взаємодії потоку із гнучкою частиною робочого елемента, і, як наслідок, до гальмування руху і турбулізації потоку, особливо помітному при зміні напрямку зворотно-поступального переміщення. Турбулізація потоку текучого середовища призводить до втрати кінетичної енергії потоку і, як наслідок, до зменшення швидкості потоку на виході із пристрою в порівнянні із входом потоку в пристрій, збільшенню тиску потоку на вході в пристрій у порівнянні з тиском на виході із пристрою, виникненню перекидаючого моменту при взаємодії робочого елемента з потоком, необхідності зміцнення пристрою від перекидання, зниженню коефіцієнта корисної дії пристрою, виключенню 3 UA 98335 C2 5 10 15 20 25 30 35 40 45 50 55 60 можливості нарощування потужності пристрою за рахунок приєднання додаткових робочих елементів або додаткових аналогічних пристроїв до працюючого пристрою безпосередньо перед ним або за ним. Робота пристрою в режимі вентилятора або рушія (створення потоку) теоретично можлива, але без якого-небудь позитивного ефекту в порівнянні з роботою звичайного гвинта, тому що ефект, що демпфірує трансляційні коливання кінця шатуна із закріпленою на ньому так, як показано в описі і на кресленнях цього джерела, провідною поверхнею робочого елемента, виключить будь-яку користь від практичного застосування даного винаходу, а саме можливість створення умов виникнення флатерних коливань, досягнення критичної швидкості потоку і викликати фізичне "збурювання" робочого елемента. При нерухомому закріпленні на шатуні двох і більше робочих елементів траєкторії переміщення робочих елементів будуть різними, отже, виникне турбулізація потоків за робочими елементами, що призведе до падіння кінетичної енергії потоку текучого середовища. Крім цього, лінійні розміри робочого елемента і шатуна нерозривно пов'язані з коефіцієнтом корисної дії пристрою. При розміщенні на шатуні додаткових робочих елементів, щоб уникнути додаткової турбулізації і пульсації потоку при перекритті в потоці текучого середовища одного робочого елемента іншим, необхідно зменшувати лінійні розміри робочих елементів. Тому коефіцієнт корисної дії механізму із двома і більше робочими елементами, нерухомо закріпленими на шатуні, в режимі вентилятора за певних умов може виявитися менше коефіцієнта корисної дії механізму з одним робочим елементом, при цьому турбулізація потоку за робочими елементами зростає. При закріпленні багатьох робочих елементів, зв'язаних між собою тягами, разом із провідним робочим елементом, на прямолінійному стрижні, зв'язаному з кінцем шатуна і що має можливість робити зворотно-поступальні переміщення уздовж напрямної, переміщення робочих елементів при роботі в режимі вентилятора або насоса стають строго зворотно-поступальними з постійним кутом атаки, а напрямок переміщення потоку рідини або газу повинен буде мінятися на протилежний при зміні напрямку переміщення робочих елементів. Турбулізація потоку і сумарний коефіцієнт тертя в цьому випадку зростає, необхідні додаткові витрати енергії для зміни кута атаки всіх робочих елементів, коефіцієнт корисної дії пристрою зменшується. Механізму зміни кута атаки робочих елементів у описаному пристрої не передбачено. Технічним результатом пропонованих способу і пристрою перетворення кінетичної енергії потоку текучого середовища в корисну роботу, об'єднаних єдиним винахідницьким задумом, є можливість створення самозбудних автоколивань типу "флатер" при взаємодії пристрою як з одним коливним робочим елементом у потоці текучого середовища, що спричиняють перетворення кінетичної енергії потоку текучого середовища, взаємодіючого з робочим елементом, у корисну роботу, так і з безліччю робочих елементів, крім цього вирівнюється швидкість робочого потоку на вході і на виході із пристрою, і, як наслідок, відсутній перекидаючий момент, внаслідок чого з'являється можливість одержання електричної енергії з будь-якого потоку практично без втрати кінетичної енергії самого потоку, можливість нарощування потужності пристрою за рахунок приєднання додаткових робочих елементів або додаткових аналогічних пристроїв до працюючого пристрою безпосередньо перед ним або за ним, тобто підвищення потужності та коефіцієнта корисної дії пристрою, а також підвищення надійності роботи пристрою в цілому. Для одержання цього результату в способі перетворення кінетичної енергії потоку текучого середовища в корисну роботу, що включає розміщення робочого елемента в потоці текучого середовища і надання йому одночасно гармонійних обертального і зворотно-поступального переміщень, передачу вироблюваної енергії від робочого елемента до пристрою для відбору потужності, відповідно до винаходу робочий елемент закріплюють у потоці текучого середовища консольно, при цьому обертальні переміщення робочого елемента здійснюють відносно осі їхнього консольного закріплення, а зворотно-поступальні переміщення робочого елемента здійснюють із постійними амплітудами у напрямку, перпендикулярному напрямку переміщення потоку, що співпадає з вектором нормальної складової рушійної сили потоку, результуюча складова якої спрямована перпендикулярно бічної поверхні робочого елемента. В потоці текучого середовища можуть встановлювати одночасно два і більше робочі елементи з можливістю регулювання зсуву по фазі один відносно одного, яким надають автономні гармонійні обертальне і зворотно-поступальне переміщення. Кінематичний зв'язок між робочими елементами здійснюють за допомогою передавальних механізмів. У пристрої для перетворення кінетичної енергії потоку текучого середовища в корисну роботу, що містить робочий елемент, зв'язаний із шатуном, установленого на нерухомій основі кривошипно-шатунного механізму, повзун якого кінематично з'єднаний із шатуном і має 4 UA 98335 C2 5 10 15 20 25 30 35 40 45 50 55 можливість зворотно-поступального переміщення по напрямній, а шатун протилежним кінцем шарнірно з'єднаний з одним кінцем кривошипа, протилежний кінець якого встановлений на цій же нерухомій основі з можливістю повороту, а також пристрій для відбору потужності, відповідно до винаходу робочий елемент виконаний у вигляді консолі, закріпленої одним своїм кінцем на шатуні і встановлений з можливістю фіксованого повороту і обертального переміщення відносно осі, на якій він закріплений, що співпадає з віссю з'єднання повзуна із шатуном, при цьому робочий елемент, має можливість зворотно-поступального переміщення у напрямку, перпендикулярному напрямку переміщення потоку, що співпадає з вектором нормальної складової рушійної сили потоку, результуюча складова якої спрямована перпендикулярно бічній поверхні робочого елемента, а шатун протилежним кінцем шарнірно з'єднаний з одним кінцем кривошипа, інший кінець шатуна призначений для передачі енергії обертання кривошипа на пристрій для відбору потужності. Він може бути виконаний багатомодульним і складається з декількох аналогічних пристроїв, кінематичний зв'язок між модулями здійснено за допомогою передавальних механізмів, розміщених на валу з однієї або протилежної сторони відносно нерухомої основи. Його може бути оснащено підтискним соплом, і дифузором, які встановлені, відповідно, перед і за робочими елементами. Внаслідок реалізації пропонованих сукупностей ознак автоколивання типу "флатер" стають можливими при співпадінні частоти власних коливань системи (пропонованого пристрою) з однією із частот власних коливань потоку, у зв'язку із чим відсутні як "частотне" збурювання потоку, так і динамічні збурювання, пов'язані з турбулізацією потоку на виході із пристрою, при цьому швидкість робочого потоку на виході із пристрою практично не відрізняється від швидкості робочого потоку на вході в пристрій, що вказує на практичну незмінність кінетичної енергії потоку текучого середовища при проходженні через пристрій незалежно від кількості і розташування робочих об'єктів по довжині, ширині і висоті пристрою; зі збільшенням площі або кількості робочих органів пропорційно зростає електроенергія, що знімається із пристрою, (пристрій працює в режимі генератора) або збільшується тягове зусилля пристрою (пристрій працює в режимі рушія), з'являється можливість нескінченого нарощування потужності, що знімається, будь-якого потоку текучого середовища (у тому числі річкових, морських і океанських плинів, водоспадів, припливів-відливів, і т. п.), крім того відсутні скачки тиску (підвищення тиску) на вході в пристрій, що вказує на відсутність перекидаючого моменту при монтажі пристрою на дахах, щоглах, транспортних засобах, палубах судів і т.п. Тобто можлива дуже проста установка і експлуатація цих пристроїв. Збереження кінетичної енергії потоку незмінною на вході в пристрій і на виході з нього дозволяє робити монтаж і експлуатацію будьякої кількості і будь-якої потужності пристроїв без порушення екологічної системи в даному регіоні, без будівництва складних і дорогих гідроспоруд. Відсутність турбулентності потоку і ламінарного плину на виході із пристрою вказує на відсутність критичних і надкритичних швидкостей на робочих елементах, що уможливлює експлуатацію даних пристроїв без створення високочастотних шумів або радіоперешкод, без шкоди для здоров'я людини, тварин і рослин. Отже, з'являється можливість монтажу пристроїв у безпосередній близькості від споживання електроенергії, що веде до істотного скорочення основних (лінії електропередач, трансформатори і підстанції) і експлуатаційних (втрати на передачу електроенергії, обслуговування ліній електропередач і підстанцій) витрат. Виготовлення пристроїв і запасних частин до них не вимагає застосування складних і дорогих матеріалів, самі пристрої прості і надійні в експлуатації, сумісні із простими і надійними програмами керування, діагностування і автоматизації. Застосування пристроїв як рушіїв на транспортних засобах призводить до істотного скорочення палива на морських і річкових судах або до збільшення швидкості морських і річкових судів при абсолютній екологічній безпеці водного середовища. Застосування пристроїв як генераторів електроенергії на автомобілях, автобусах, трамваях, поїздах, морських і річкових судах також приводить до істотного скорочення витрати палива і електроенергії. Експлуатація пристроїв виключає явища парникових ефектів і шкідливих викидів, виключає підвищення температури всієї планети і пов'язаних з ним екологічних катастроф. Досягнення перерахованих вище технічних ефектів доведено за допомогою діаграм аеродинамічних досліджень, які отримані на аеродинамічному стенді. Стенд на момент проведення випробувань був акредитований і атестований в ИПП НАН України, складений протокол атестації аеродинамічного стенда, оформленого у відповідності із НТД із присвоєнням атестаційного номера і видачею Атестата відповідності. Крім того, є фільм, що ілюструє роботу пропонованого пристрою, на якому спеціальна увага приділена демонстрації ламінізації потоку по ходу його руху, за робочими елементами і за пристроєм, також є діюча робоча установка. 5 UA 98335 C2 5 10 15 20 25 30 35 40 45 50 55 Загальний термін "робочий елемент" включає широкі поняття: "крило" у використовуваному тут значенні - це "гідрокрило", використовуване в поточній воді, і "аерокрило", використовуване для перетворення енергії вітру, або "лопать", використовувана для створення тягового зусилля. Термін "крило", що припускає нерухливі або обертові робочі елементи, використовувані для створення піднімальної сили для літальних апаратів, не застосовуємо в контексті даного винаходу. Термін "нерухома основа" припускає твердий каркас, на якому розміщені виконавчі механізми для здійснення гармонійних обертальних і зворотно-поступальних переміщень і який може бути нерухомо закріплений відносно поверхні землі, або може бути закріплений на транспортному засобі, або виступати в ролі плавучої платформи на воді. Перелік фігур графічного зображення, що ілюструють пропоновані винаходи: на Фіг. 1 представлено одномодульний пристрій, вид збоку; на Фіг. 2 те ж саме, вид з боку розташування робочого елемента; на Фіг. 3 представлено чотиримодульний пристрій із чотирма робочими елементами, вид з боку розташування робочих елементів; на Фіг. 4 представлено чотиримодульний пристрій, вид з боку передавальних механізмів; на Фіг. 5 представлена схема роботи пристрою в режимі рушія судна (у розрізі); на Фіг. 6 представлена схема взаємодії одномодульного пристрою з потоком текучого середовища; на Фіг. 7 представлена схема взаємодії чотиримодульного пристрою з потоком текучого середовища; на Фіг. 8 представлена схема взаємодії восьмимодульного пристрою з потоком текучого середовища; на Фіг. 9 представлена схема взаємодії одномодульного пристрою з потоком робочого середовища в режимі рушія судна; на Фіг. 10 представлений пристрій, у якому як виконавчі механізми для здійснення взаємозалежних між собою гармонійних обертальних і зворотно-поступальних переміщень робочого елемента, а також для здійснення фіксованого повороту робочого елемента, використані кінематично не зв'язані між собою гідроциліндри, керування якими здійснено за допомогою звичайних засобів автоматизації і комп'ютерного програмування; на Фіг. 11 представлений варіант пристрою, у якому як виконавчі механізми для здійснення взаємозалежних між собою гармонійних обертальних і зворотно-поступальних переміщень робочих елементів використані кінематично не зв'язані між собою виконавчі механізми, виконані у вигляді кривошипно-шатунного механізму для здійснення зворотно-поступальних переміщень робочого елемента і у вигляді мотор-редуктора, установленого на валу для здійснення гармонійних обертальних переміщень і фіксованого повороту робочого елемента. Пристрій для перетворення кінетичної енергії потоку текучого середовища в корисну роботу (фіг. 1, 2) містить консольно встановлені робочі елементи 1, що мають можливість розміщення в потоці текучого середовища 2, згідно винаходу пристрій виконано в цьому варіанті одномодульним, робочий елемент 1 закріплено консольно і нерухомо на шатуні 3, установленого на нерухомій основі 4 кривошипно-шатунного механізму, повзун 5 якого з'єднаний із шатуном 3 за допомогою осі 6 і має можливість зворотно-поступального переміщення по напрямній 7, а шатун 3 протилежним кінцем шарнірно з'єднаний із кривошипом 8, кінематично зв'язаним із установленим на цій же нерухомій основі 4 одним кінцем вала 9, інший кінець якого призначений для передачі енергії обертання кривошипа 8 на пристрій для відбору потужності (на фиг. не показано). Амплітуда зворотно-поступальних переміщень робочих елементів 1 залежить від геометричних параметрів кривошипа 8. Робочий елемент 1 установлений під кутом 90 градусів до шатуна 3 з кутом атаки L відносно потоку 2; на Фіг. 3 представлено чотиримодульний пристрій із чотирма робочими елементами 1, установленими під кутом 90 градусів відносно шатунів 3 з кутом атаки L відносно потоку 2; на Фіг. 4 представлено чотиримодульний пристрій, вид з боку передавальних механізмів, виконаних у вигляді шестерень 10, установлених на валах 9. На Фіг. 5 представлена схема роботи пристрою в режимі рушія судна (у розрізі), у якому нерухлива основа 4 являє собою корпус судна, на якому розміщені сім модулів, що складаються з робочих елементів 1, шатунів 3, кривошипів 8, передатних шестерень 10, валів 9, повзунів 5, осей 6 і напрямних (на фігурі не показані). Пристрій оснащений підтискним соплом 11 і дифузором 12. Крім того, робочий елемент 1 установлений з можливістю фіксованого повороту і обертального переміщення навколо осі 6, відносно якої він закріплений на шатуні 3, а геометрична вісь осі 6 розташована в площині робочого елемента 1. Це дає можливість установлювати фіксований кут зсуву фаз між обертальними і зворотно-поступальними переміщеннями робочих елементів 1, необхідних для запуска пристрою і його ефективної роботи, а також для зупинки пристрою при проведенні профілактичних робіт шляхом установки нульового кута атаки всіх робочих елементів 1 відносно потоку 2 (механізм фіксованого повороту на фігурах не показаний). 6 UA 98335 C2 5 10 15 20 25 30 35 40 45 50 55 60 Кращим варіантом пропонованого пристрою є варіант, коли він складається з декількох згаданих модулів (фіг. 3, 4), кінематично зв'язаних між собою і що мають можливість роботи зі зсувом фаз. Кінематичний зв'язок між модулями може бути здійснений за допомогою передатних шестерень 10, розміщених на валу 9 з однієї або протилежної сторони відносно нерухливої основи 4. Зсув фаз між модулями встановлюється за допомогою передатних шестерень 10. При ще одному варіанті виконання пропонованого пристрою (фіг. 8) він складається з парного числа модулів, а осі 6 закріплення робочих елементів 1 кожної пари модулів мають можливість зворотно-поступального переміщення в одній площині зі зсувом фаз 180 градусів. На фіг. 5 зображений пристрій для роботи в режимі рушія судна. Нерухомою основою 4 служить корпус судна. Пристрій може бути постачено підтискним соплом 11, призначеним для збільшення обсягу і швидкості потоку 2, і дифузором 12, призначеним для зниження тиску потоку 2 на робочі елементи 1, які встановлені, відповідно, перед робочими елементами 1 і за робочими елементами 1 по ходу руху потоку (по ходу руху судна). Судновий двигун 13 є генератором механічної енергії, що робочими елементами 1 перетворюється в зусилля тяги 14. При ще одному варіанті виконання пропонованого пристрою (фіг. 10) як виконавчі механізми для здійснення взаємозалежних між собою гармонійних обертальних і зворотно-поступальних переміщень робочих елементів 1, а також для здійснення фіксованого повороту робочих елементів 1 застосовують кінематично не зв'язані між собою гідроциліндрі5, що здійснює зворотно-поступальні переміщення відносно напрямних 7 і рухливу каретку 16 з гідравлічним приводом (на фігурі не показаний) повороту робочого елемента 1, що здійснює обертальні переміщення відносно осі 6 закріплення робочого елемента 1. Керування виконавчими механізмами здійснюють за допомогою звичайних засобів автоматизації і комп'ютерного програмування. При ще одному варіанті виконання пропонованого пристрою (фіг. 11) як виконавчі механізми для здійснення взаємозалежних між собою гармонійних обертальних і зворотно-поступальних переміщень робочих елементів 1, а також для здійснення фіксованого повороту робочого елемента 1 застосовують кінематично не зв'язані між собою кривошипношатунний механізм для здійснення зворотно-поступальних переміщень робочого елемента 1, і рухливу каретку 16 з механічним приводом у вигляді мотор-редуктора (на фігурі не показаний) повороту робочого елемента 1, установленого на осі 6 для здійснення гармонійних обертальних переміщень і фіксованого повороту робочого елемента 1. Спосіб перетворення кінетичної енергії потоку текучого середовища в корисну роботу здійснюється в процесі роботи пропонованого пристрою в такий спосіб. Робочий елемент 1 розміщують у потоці текучого середовища 2 під кутом L відносно руху потоку 2 з можливістю здійснювати зворотно-поступальні переміщення в напрямку, перпендикулярному напрямку руху потоку 2, і обертального переміщення навколо осі 6, відносно якої робочий елемент 1 закріплений на шатуні 3, а геометрична вісь осі 6 знаходиться в площині робочого елемента 1 (фіг. 1, 2). Потік текучого середовища 2 (фіг. 6) впливає на робочий елемент 1 у положенні "А" і створює зусилля, що переміщує робочий елемент 1 у напрямку, перпендикулярному напрямку руху потоку 2 (напрямок переміщення зазначений стрілкою), і обертає робочий елемент 1 навколо осі 6 (фіг. 1, 2), при цьому вектор нормальної складової "Рn" рушійної сили потоку "Р" (фіг. 6) співпадає з напрямком переміщення робочого елемента 1, а результуюча "Рс" рушійної сили потоку "Р" спрямована перпендикулярно бічної поверхні робочого елемента 1. Кут "L" між робочим елементом 1 і напрямком руху потоку зменшується, при цьому зменшується і величина впливу потоку 2 на робочий елемент 1. У положенні "В" робочий елемент 1 міняє напрямок переміщення на протилежний, при цьому кут "L" = 0, вплив потоку 2 на робочий елемент 1 відсутній, а положення "В" робочий елемент проходить по інерції за рахунок енергії обертання кривошипа 8 (фіг. 1, 2). Після проходження положення "В" (фіг. 6) кут "L" стає відмінним від нуля, відповідно, виникає зусилля, що співпадає з інерційним зусиллям впливу кривошипа 8 (фіг. 1, 2) і що переміщує робочий елемент 1 у положення "С" (фіг. 6), кут "L" зростає, при цьому вектор нормальної складової "Рn" рушійної сили потоку "Р" співпадає з напрямком переміщення робочого елемента 1, а результуюча "Рс" рушійної сили потоку "Р" спрямована перпендикулярно бічній поверхні робочого елемента 1. Максимальний вплив потоку 2 на робочий елемент 1 у положенні "А" і "С", при цьому кут "L" досягає максимуму і стає рівним 45 градусам (у цьому випадку). Після проходження положення "С" кут "L" зменшується, відповідно, зменшується величина впливу потоку 2 на робочий елемент 1. У положенні "D" робочий елемент 1 міняє напрямок переміщення на протилежний, при цьому кут "L" = 0, вплив потоку 2 на робочий елемент 1 відсутній, а положення "D" робочий елемент 1 проходить по інерції за рахунок енергії обертання кривошипа 8 (фіг. 1, 2). Після проходження положення "D" (фіг. 6) кут "L" стає відмінним від нуля, відповідно, виникає зусилля, що співпадає з інерційним зусиллям 7 UA 98335 C2 5 10 15 20 25 30 35 40 45 50 55 60 впливу кривошипа 8 (фіг. 1, 2) і що переміщує робочий елемент 1 у положення "А" (фіг. 6), кут "L" зростає, при цьому вектор нормальної складової "Рn" рушійної сили потоку "Р" співпадає з напрямком переміщення робочого елемента 1, а результуюча "Рс" рушійної сили потоку "Р" спрямована перпендикулярно бічній поверхні робочого елемента 1. Далі процес повторюється. Для зменшення нерівномірності руху робочого елемента 1 (фіг. 1, 2), пов'язаного зі зміною руху повзуна 5 при проходженні "мертвих" точок (положення "В" і "Д" фіг. 6), а також для підвищення надійності і ефективності роботи пристрою при взаємодії з потоком 2 на нерухомій основі 4 (фіг. 3, 4) може бути розміщене декілька (наприклад, чотири) модулі. Схема рівномірного коливального переміщення робочих елементів 1 пристрою, що забезпечує гарантований режим самозбудних коливань типу "флаттер" при взаємодії з потоком 2, представлена на фіг. 7. Стрілками показані напрямки зворотно-поступальних переміщень робочих елементів 1, що відбуваються за рахунок впливу потоку 2 на робочі елементи 1. Кут зсуву фаз між переміщеннями сусідніх робочих елементів 1 установлюють механічно шляхом відповідного розташування передатних шестерень 10 (фіг. 4) залежно від поставленої задачі. У даному прикладі (фіг. 7) кут зсуву фаз між переміщеннями сусідніх робочих елементів 1 дорівнює 90 градусів. Робочий потік 2 (фіг. 7) взаємодіє з робочими елементами 1/1, 1/2, 1/3 і 1/4 чотиримодульного пристрою, при цьому (позиція А-початковий момент часу) вплив на робочий елемент 1/1 максимальний (положення 1/1(1), кут L=max), впливу на робочий елемент 1/2 потік 2 не здійснює (положення 1/2(1), кут L=0), вплив потоку на робочий елемент 1/3 максимальний (положення 1/3(1), кут L=max, напрямок переміщення прямо протилежний напрямку переміщення робочого елементу 1/1), впливу на робочий елемент 1/4 потік 2 не здійснює (положення 1/4(1), кут L=0). При повороті кривошипа 8 на 90 градусів (фіг. 3) робочі елементи 1/1 і 1/3 (фіг. 7, позиція В - поворот кривошипа 8 на 90 градусов відносно начального моменту часу) займуть положення 1/1(2) і 1/3(2) відповідно, при яких відсутня їх взаємодія з потоком 2, тому що кути L=0, у той час як робочі елементи 1/2 і 1/4 займуть положення 1/2(2) і 1/4(2) відповідно, при яких вплив потоку 2 на ці робочі елементи буде максимальним за рахунок максимального кута атаки L. Далі процес руху повторюється (фіг. 7, позиція С - поворот кривошипа 8 на 180 градусів відносно начального моменту часу і D - поворот кривошипа 8 на 270 градусов відносно начального моменту часу) через кожні 90 градусів обертання кривошипа 8 (фіг. 3) за вищенаведеною схемою. При цьому сумарне зусилля, що передається на передатну шестірню 10 (фіг. 4), буде рівним сумарному зусиллю впливу потоку 2 на всі робочі елементи 1 пристрою одночасно. З метою збільшення ефективності перетворення енергії потоку 2 робочі елементи 1 можуть розташовуватися не тільки уздовж по потоці (фіг. 3), але і за іншою схемою. Схема взаємодії восьмимодульного пристрою, у якій осі 6 закріплення робочих елементів 1 кожної пари модулів виконують зворотно-поступальні переміщення в одній площині зі зсувом фаз 180 градусів, представлена на фіг. 8. Робочий потік 2, впливаючи на робочі елементи 1/1 і 1/2 (поз. А), переміщає їх назустріч один одному, підтискаючи обсяг потоку 2, розташованого в уявлюваній камері 1/ 1-1/1-1/ 2-1/2. У цей час робочі елементи 1/3 і 1/4 (поз. В) перебувають у нейтральному положенні (кут L=0), готові почати рух (стискання потоку 2, розташованого в уявлюваній камері 1/3-1/3-1/4-1/4); робочі елементи 1/5 і 1/6 рухаються в протилежні сторони, створюючи розрядження в уявлюваній камері 1/ 5-1/5-1/ 6-1/6 і сприяючи збільшенню енергії руху потоку 2, а робочі елементи 1/7 і 1/8 перебувають у нейтральному положенні, готові почати рух у протилежні сторони, тим самим створюючи сприятливі умови для подальшого руху потоку 2. У такий спосіб відбувається збільшення кінетичної енергії руху потоку 2 за робочими елементами 1, отже, збільшується і корисна робота пристрою. Для використання пристрою в режимі рушія (фіг. 5) необхідно підвести механічну (електричну) енергію від двигуна (електродвигуна) на вал 9, передатні шестерні 10 і кривошип 8. Обертовий рух кривошипа 8 через шатун 3 перетвориться в гармонійні обертальні і зворотно-поступальні переміщення робочих елементів 1, які, взаємодіючи з робочим тілом (рідиною або газом), створюють тягове (осьове) зусилля, що пересуває транспортний засіб (водний, наземний або повітряний) у напрямку, перпендикулярному напрямку зворотно-поступальних переміщень робочих елементів 1. При цьому вектор нормальної складової "Fn" тягового (осьового) зусилля ««Fт" протилежний напрямку переміщення робочого елемента 1, а результуюча "Fc" тягового (осьового) зусилля "Fт" спрямована перпендикулярно бічній поверхні робочого елемента 1. Напрямок руху потоку 2, що виникає внаслідок впливу робочих елементів 1 на робоче тіло (рідина або газ), протилежне напрямку тягового зусилля судна, а вектор нормальної складової "Рn" рушійної сили потоку "Р" співпадає з напрямком переміщення робочого елемента 1. Для збільшення ефективності перетворення механічної енергії суднового двигуна в осьове (тягове) зусилля "Fт" руху судна на вході в пристрій перед робочими елементами 1 можлива установка підтискного сопла 11, призначеного для збільшення об'єму і швидкості потоку 2, а на виході із 8 UA 98335 C2 5 10 15 20 25 30 35 40 45 50 55 60 пристрою за робочими елементами 1 можлива установка дифузора 12, призначеного для зниження тиску потоку 2 на робочі елементи 1 (фіг. 5). Схема перетворення механічної енергії судна в тягове зусилля (корисну роботу) руху судна (транспортного засобу) на прикладі взаємодії одномодульного пристрою в режимі рушія судна з робочим середовищем (рідиною або газом) представлена на фіг. 9, при цьому напрямок руху потоку протилежний напрямку тягового зусилля руху судна "Т". У цьому випадку пристрій працює в такий спосіб (фіг. 9). Робочий елемент 1 розміщають у робочому текучому середовищі (рідина або газ) під кутом L відносно осі судна з можливістю здійснювати зворотно-поступальні переміщення в напрямку, перпендикулярному осі судна, і обертального переміщення навколо осі 6, відносно якої робочий елемент 1 закріплений на шатуні 3, а геометрична вісь осі 6 перебуває в площині робочого елемента 1 (фіг. 5). Механічна енергія суднового двигуна через передавальні механізми 9, 10, 8 і 3 перетвориться в гармонійні обертальні і зворотно-поступальні переміщення робочих елементів 1, які, взаємодіючи з робочим тілом (рідиною або газом), створюють тягове (осьове) зусилля, що пересуває транспортний засіб (водний, наземний або повітряний) у напрямку, перпендикулярному напрямку зворотно-поступальних переміщень робочих елементів 1. Робочий елемент 1 (фіг. 9) впливає на робоче середовище (рідину) у положенні "А" і створює зусилля, що переміщає робоче середовище в напрямку, перпендикулярному напрямку поступального переміщення осі 6 закріплення робочого елемента 1, навколо якої робочий елемент 1 робить і обертальне переміщення (фіг. 1, 2, 5), при цьому вектор нормальної складової "Рn" рушійної сили "Р" потоку текучого середовища 2 (фіг. 9), що виникає внаслідок впливу робочого елемента 1 на робоче середовище (рідина), співпадає з напрямком переміщення робочого елемента 1, а результуюча "Рс" рушійної сили потоку "Р" спрямована перпендикулярно бічної поверхні робочого елемента 1. Одночасно виникає тягове (осьове) зусилля "Т", спрямоване протилежно напрямку руху потоку "Р" і судно, що переміщає, уздовж його осі. Вектор нормальної складової тягового (осьового) зусилля «Τn" спрямованні убік, протилежну поступальному переміщенню осі 6 закріплення робочого елемента 1. Кут "L" між робочим елементом 1 і напрямком руху потоку зменшується, при цьому зменшується і величина впливу робочого елемента 1 на робоче середовище. У положенні "В" робочий елемент 1 міняє напрямок переміщення на протилежне, при цьому кут "L" = 0, вплив робочого елемента 1 на робоче середовище відсутні, а положення "В" робочий елемент проходить по інерції за рахунок енергії обертання кривошипа 8 (фіг. 1, 2, 5). Після проходження положення "В" (фіг. 9) кут "L" стає відмінним від нуля, робочий елемент 1 переміщається в положення "3" (фіг. 9), кут "L" зростає, при цьому зростає вплив робочого елемента 1 на робоче середовище, переміщаючи її в напрямку, перпендикулярному напрямку поступального переміщення осі 6 закріплення робочого елемента 1, навколо якої робочий елемент 1 робить і обертальне переміщення (фіг. 1, 2, 5), вектор нормальної складової "Рn" рушійної сили потоку "Р" співпадає з напрямком переміщення робочого елемента 1, а результуюча "Рс" рушійної сили потоку "Р" спрямована перпендикулярно бічній поверхні робочого елемента 1. Тягове зусилля руху судна "Fт" спрямовано протилежно напрямку руху потоку "Р" і переміщає судно уздовж його осі. Максимальний вплив робочого елемента 1 на робоче середовище в положенні "А" і "С", при цьому кут "L" досягає максимуму і стає рівним 45 градусам (у цьому випадку). Після проходження положення "С" кут "L" зменшується, відповідно, зменшується величина впливу робочого елемента 1 на робоче середовище. У положенні "Д" робочий елемент 1 міняє напрямок переміщення на протилежний, при цьому кут "L" = 0, вплив робочого елемента 1 на робоче середовище відсутній, а положення "Д" робочий елемент 1 проходить по інерції за рахунок енергії обертання кривошипа 8 (фіг. 1, 2, 5). Після проходження положення "Д" (фіг. 9) кут "L" стає відмінним від нуля, робочий елемент 1 переміщається в положення "А", кут "L" зростає, при цьому вектор нормальної складової "Рn" рушійної сили потоку "Р" співпадає з напрямком переміщення робочого елемента 1, а результуюча "Рc" рушійної сили потоку "Р" спрямована перпендикулярно бічній поверхні робочого елемента 1. Тягове (осьове) зусилля "Fт" переміщає судно в напрямку, протилежному напрямку руху потоку "Р" уздовж осі судна. Вектор нормальної складової тягового (осьового) зусилля "Fn" спрямований убік, протилежний поступальному переміщенню осі 6 закріплення робочого елемента 1. Далі процес повторюється. Кут зсуву фаз між обертальними і зворотно-поступальними переміщеннями виставляється залежно від необхідного завдання (у вищенаведених конкретних схемах кут зсуву фаз дорівнює 90 градусів). Кут зсуву фаз між переміщеннями сусідніх модулів виставляється залежно від необхідного завдання (у вищенаведених конкретних схемах кут зсуву фаз дорівнює 90 або 180 градусів). Точно також, залежно від поставленої задачі (пристрій працює в режимі генератора або рушія), можливе регулювання зсуву центра ваги (центра крутіння) робочого елемента 1, тим самим збільшується крутний момент, а, отже, і зусилля, що 9 UA 98335 C2 5 10 15 20 виникає від взаємодії робочого тіла (потоку рідини, газу або суміші) з робочим елементом 1 пристрою і що передається на генератор (пристрій працює в режимі генератора), або від двигуна через пристрій на робоче тіло (пристрій працює в режимі рушія). Схема роботи пристрою в режимі вентилятора аналогічна схемі роботи пристрою в режимі рушія (фіг. 9). При ще одному варіанті виконання пропонованого пристрою (фіг. 10) як виконавчі механізми для здійснення взаємозалежних між собою гармонійних обертальних і зворотно-поступальних переміщень робочих елементів 1, а також для здійснення фіксованого повороту робочого елемента 1 застосовують кінематично не зв'язані між собою гідроциліндр 15, що здійснює зворотно-поступальні переміщення робочих елементів 1 відносно напрямних 7, і рухливу каретку 16 з гідравлічним приводом (на фігурі не показаний) повороту робочого елемента 1, що здійснює обертальні переміщення робочого елемента 1 відносно осі 6 закріплення робочого елемента 1. Керування виконавчими механізмами здійснюють за допомогою звичайних засобів автоматизації і комп'ютерного програмування. При ще одному варіанті виконання пропонованого пристрою (фіг. 11) як виконавчі механізми для здійснення взаємозалежних між собою гармонійних обертальних і зворотно-поступальних переміщень робочих елементів 1 застосовують кінематично не зв'язані між собою кривошипно-шатунний механізм для здійснення зворотно-поступальних переміщень робочого елемента 1 і рухливу каретку 16 з механічним приводом у вигляді мотор-редуктора (на фігурі не показаний) повороту робочого елемента 1, установленого на осі 6 для здійснення гармонійних обертальних переміщень і фіксованого повороту робочого елемента 1. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 60 1. Спосіб перетворення кінетичної енергії потоку текучого середовища в корисну роботу, що включає розміщення робочого елемента в потоці текучого середовища і надання йому одночасно гармонійних обертального і зворотно-поступального переміщень, передачу вироблюваної енергії від робочого елемента до пристрою для відбору потужності, який відрізняється тим, що робочий елемент закріплюють у потоці текучого середовища консольно, при цьому обертальні переміщення робочого елемента здійснюють відносно осі їхнього консольного закріплення, а зворотно-поступальні переміщення робочого елемента здійснюють із постійними амплітудами у напрямку, перпендикулярному напрямку переміщення потоку, що співпадає з вектором нормальної складової рушійної сили потоку, результуюча складова якої спрямована перпендикулярно бічної поверхні робочого елемента. 2. Спосіб за п. 1, який відрізняється тим, що в потоці текучого середовища встановлюють одночасно два і більше робочих елементів з можливістю регулювання зсуву по фазі один відносно одного, яким надають автономні гармонійні обертальне і зворотно-поступальне переміщення. 3. Спосіб п. 2, який відрізняється тим, що кінематичний зв'язок між робочими елементами здійснюють за допомогою передавальних механізмів. 4. Пристрій для перетворення кінетичної енергії потоку текучого середовища в корисну роботу, що містить робочий елемент, зв'язаний із шатуном, установленого на нерухомій основі кривошипно-шатунного механізму, повзун якого кінематично з'єднаний із шатуном і має можливість зворотно-поступального переміщення по напрямній, а шатун протилежним кінцем шарнірно з'єднаний з одним кінцем кривошипа, протилежний кінець якого встановлений на цій же нерухомій основі з можливістю повороту, а також пристрій для відбору потужності, який відрізняється тим, що робочий елемент виконаний у вигляді консолі, закріпленої одним своїм кінцем на шатуні і встановлений з можливістю фіксованого повороту і обертального переміщення відносно осі, на якій він закріплений, що співпадає з віссю з’єднання повзуна із шатуном, при цьому робочий елемент, має можливість зворотно-поступального переміщення у напрямку, перпендикулярному напрямку переміщення потоку, що співпадає з вектором нормальної складової рушійної сили потоку, результуюча складова якої спрямована перпендикулярно бічної поверхні робочого елемента, а шатун протилежним кінцем шарнірно з’єднаний з одним кінцем кривошипа, інший кінець шатуна призначений для передачі енергії обертання кривошипа на пристрій для відбору потужності. 5. Пристрій за п. 4, який відрізняється тим, що він виконаний багатомодульним і складається з декількох аналогічних описаним у п. 4 пристроїв, кінематичний зв'язок між модулями здійснено за допомогою передавальних механізмів, розміщених на валу з однієї або протилежної сторони відносно нерухомої основи. 6. Пристрій за п. 4, який відрізняється тим, що його оснащено підтискним соплом і дифузором, які встановлені, відповідно, перед і за робочими елементами. 10 UA 98335 C2 11 UA 98335 C2 12 UA 98335 C2 13 UA 98335 C2 14 UA 98335 C2 Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 15
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for conversion of kinetic energy of fluid medium flow to useful energy
Автори англійськоюHoncharenko Serhii Petrovych
Назва патенту російськоюСпособ преобразования кинетической энергии потока текучей среды в полезную работу и устройство для его осуществления
Автори російськоюГончаренко Сергей Петрович
МПК / Мітки
Мітки: текучого, енергії, кінетичної, перетворення, середовища, здійснення, потоку, роботу, пристрій, спосіб, корисну
Код посилання
<a href="https://ua.patents.su/17-98335-sposib-peretvorennya-kinetichno-energi-potoku-tekuchogo-seredovishha-u-korisnu-robotu-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб перетворення кінетичної енергії потоку текучого середовища у корисну роботу і пристрій для його здійснення</a>
Пристрій для перетворення кінетичної енергії потоку текучого середовища у корисну роботу

Номер патенту: 49916
Опубліковано: 11.05.2010
Автор: Гончаренко Сергій Петрович
МПК: F03D 5/00
Мітки: перетворення, корисну, пристрій, текучого, потоку, енергії, середовища, кінетичної, роботу
Формула / Реферат:
1. Пристрій для перетворення кінетичної енергії потоку текучого середовища у корисну роботу, що містить консольно встановлені робочі елементи, виконані з можливістю розміщення в потоці текучого середовища, який відрізняється тим, що пристрій виконаний одно- або багатомодульним, при цьому робочий елемент, що входить до складу кожного модуля, установлений на нерухомій основі, закріплений консольно і нерухомо на шатуні кривошипно-шатунного...
Спосіб перетворення енергії текучого середовища в обертальний рух і пристрій для його здійснення
Номер патенту: 49485
Опубліковано: 16.09.2002
Автор: Келов Довлет Довлетович
МПК: F03D 7/06
Мітки: обертальний, пристрій, текучого, здійснення, середовища, перетворення, спосіб, енергії, рух
Формула / Реферат:
1. Спосіб перетворення енергії текучого середовища в обертальний рух, який заснований на тому, що в текучому середовищі установлюють вісь перпендикулярно напрямку руху потоку цього текучого середовища і на деякій відстані від цієї осі поміщають крило, власну подовжню вісь якого розміщають за допомогою конструктивного елемента паралельно зазначеній осі, при цьому при русі крила під дією гідродинамічних сил по дузі кругової орбіти, зверненої до...
Машина прямого перетворення тепла в корисну роботу за особливим термодинамічним циклом з активним використанням кінетичної енергії робочого тіла
Номер патенту: 43474
Опубліковано: 17.12.2001
Автори: Бордюг Сергій Олександрович, Бордюг Олександр Іванович
МПК: F01K 27/00
Мітки: кінетичної, тепла, машина, активним, роботу, використанням, тіла, прямого, циклом, перетворення, особливим, робочого, енергії, термодинамічним, корисну
Формула / Реферат:
1. Машина для перетворення тепла в корисну роботу за термодинамічним циклом з активним використанням кінетичної енергії робочого тіла, яка має пристрій для стиснення робочого тіла - дифузор, пристрій для розширення робочого тіла - прискорювач і нагрівач - джерело тепла - двигун, яка відрізняється тим, що прискорювач виконаний у вигляді жолоба, відкритого в навколишнє середовище дифузором, а нагрівач - це повітря середовища в дифузорі, нагріте...
Спосіб перетворення енергії водного потоку в механічну та/або електричну енергію та пристрій для його здійснення
Номер патенту: 42203
Опубліковано: 16.02.2004
Автор: Курочкін Данило Якович
МПК: F03B 13/12
Мітки: потоку, пристрій, механічну, здійснення, спосіб, енергію, перетворення, водного, електричну, енергії
Формула / Реферат:
1. Спосіб перетворення енергії водного потоку в механічну та/або електричну енергію шляхом перетворення енергії водного потоку у зворотно-поступальні переміщення поплавка у вертикальному напрямку та перетворення енергії переміщень поплавка в енергію подачі води до турбоелектричного агрегату та/або до трубопроводів, який відрізняється тим, що перетворення енергії водного потоку у зворотно-поступальні переміщення поплавка здійснюють шляхом...
Спосіб перетворення вторинного потоку енергії вищих гармонік і пристрій для його здійснення
Номер патенту: 54783
Опубліковано: 17.03.2003
Автор: Бекіров Ескендер Алімович
МПК: H02J 3/00
Мітки: енергії, здійснення, вторинного, перетворення, потоку, пристрій, вищих, спосіб, гармонік
Формула / Реферат:
1. Спосіб перетворення вторинного потоку енергії вищих гармонік, що включає вирізання основної гармоніки, відвід і фільтрацію вищих гармонік, підсумовування основної і перетворених вищих гармонік і повернення їх у живильну мережу, який відрізняється тим, що вищі гармоніки фільтрують через перший смуговий фільтр, підсумовують на випрямлячу, а випрямлену напругу через імпульсний стабілізатор струму подають на генератор синусоїдальної напруги,...
Попередній патент: Пуринові похідні і їх застосування як модуляторів тол-подібного рецептора 7
Наступний патент: Спосіб вилучення ароматичних вуглеводнів з коксового газу шляхом абсорбції
Випадковий патент: Спосіб графологічної діагностики психофізіологічних особливостей учнів початкової школи шляхом використання персонального комп'ютера і сканера