Автономна дістанційно керована транспортна модульна платформа супроводження повітряного десанту
Номер патенту: 111571
Опубліковано: 10.05.2016
Автори: Адамов Юрій Іванович, Гуляк Олег Вікторович, Беліков Віктор Тріфонович, Кравчук Олег Іванович, Даник Юрій Григорович, Ковалішин Сергій Семенович

Формула / Реферат
1. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту, що є об'єктом повітряного десантування, що складається зі щонайменше одного функціонального блока-модуля, який виконаний як пласка платформа та має можливість бути механічно об′єднаним один з одним, яка відрізняється тим, що кожний, що входить в неї, енергетично автономний транспортний агрегат - функціональний блок-модуль високого рівня - складається з пласкої платформи із захищеними порожнинами з автономним джерелом електричного енергоживлення електрохімічного, накопичувального або комбінованого типу, перетворювачами електроенергії, які безпосередньо живлять силові та керуючі пристрої; містить кронштейни для кріплення опорних (приводних) коліс, пристосування для жорсткої фіксації десантованого устаткування і затискачі для під'єднання уповільнювачів зниження десантованого вантажу, причому по периметру зовнішньої верхньої поверхні вказаної платформи встановлені поворотні кронштейни з електричними двигунами, на валах яких закріплені повітряні звичайні або серповидні гвинти-пропелери тягового або штовхального типу, а на її нижній поверхні - поворотні кронштейни з опорними колесами повноприводного електромеханічного рушія колісного, гусеничного або комбінованого типу, в обіддя опорних коліс якого вбудовані обернені приводні широкорегульовані електричні двигуни прямого, безпосереднього тягового електричного приводу рушія, причому окремі платформи об'єднані за допомогою жорсткого або гнучкого механічного зв'язку, а кожен автономний транспортний агрегат обладнаний системою відеоспостереження для відеозв'язку з наземним оператором і комплектом виконавчого облаштування системи дистанційного керування з землі і повітря.
2. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту за п. 1, яка відрізняється тим, що повітряні гвинти, встановлені на зовнішній верхній поверхні платформи кожного автономного транспортного агрегату поміщені в аеродинамічне кільце, утворюючи аеродинамічну систему типу імпелер.
3. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту за п. 1, яка відрізняється тим, що уповільнювачі зниження десантованих з вантажем або самостійно автономних транспортних агрегатів виконані на основі конструктивних елементів парапланного або дельтапланного типів.
4. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту за пп. 1 і 2, яка відрізняється тим, що кожен з тих, що входять до її складу десантованих з вантажем або самостійно автономних транспортних агрегатів, забезпечений віяловою системою висувних складаних площин-крил, розміщених у бічних порожнинах пласких платформ вказаних автономних транспортних агрегатів.
5. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту за п. 1, яка відрізняється тим, що загальна кількість опорних коліс щонайменше одного з автономних транспортних агрегатів, що входять до її складу, та десантується з вантажем або самостійно, визначається величиною питомого показника Νок=2…4 ок/м2 (Νок - кількість опорних коліс на один квадратний метр площі плоских платформ візків-модулів) при відношенні Dок/bок (Dок - зовнішній діаметр опорного колеса; bок - ширина шини опорного колеса транспортних функціональних блоків-модулів) що знаходиться в межах 0,8…1,0 при Dок£300 мм.
Текст
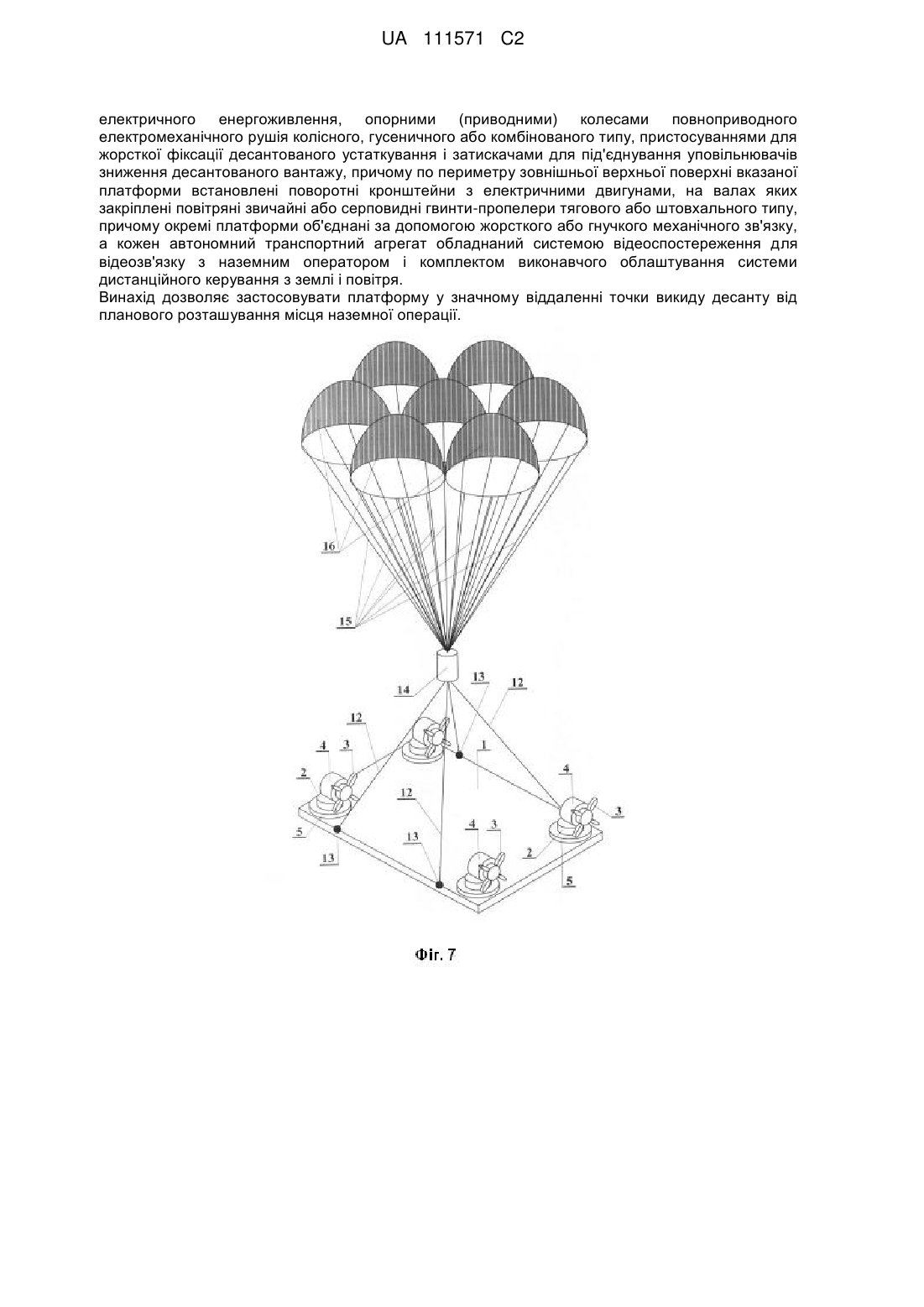
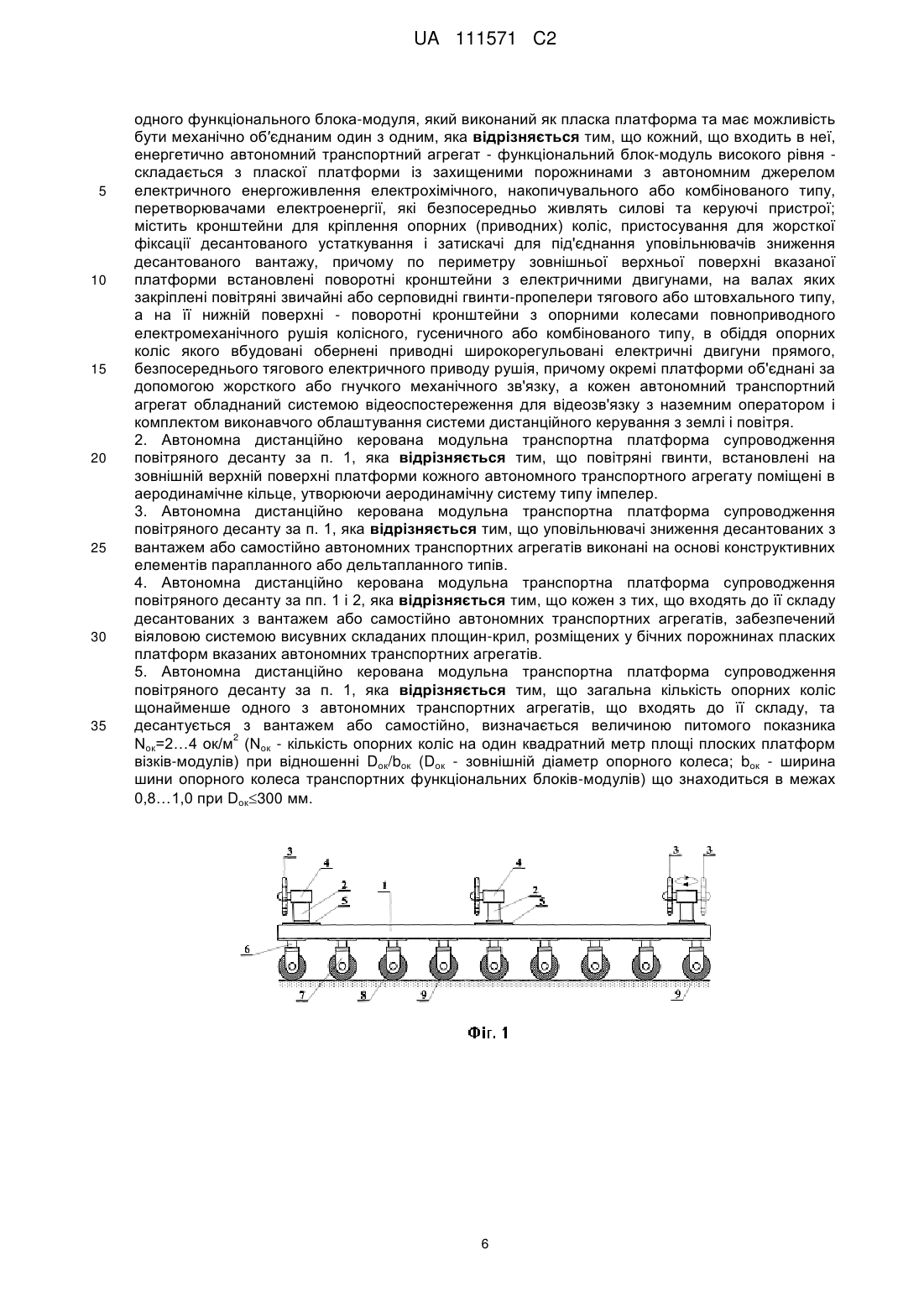
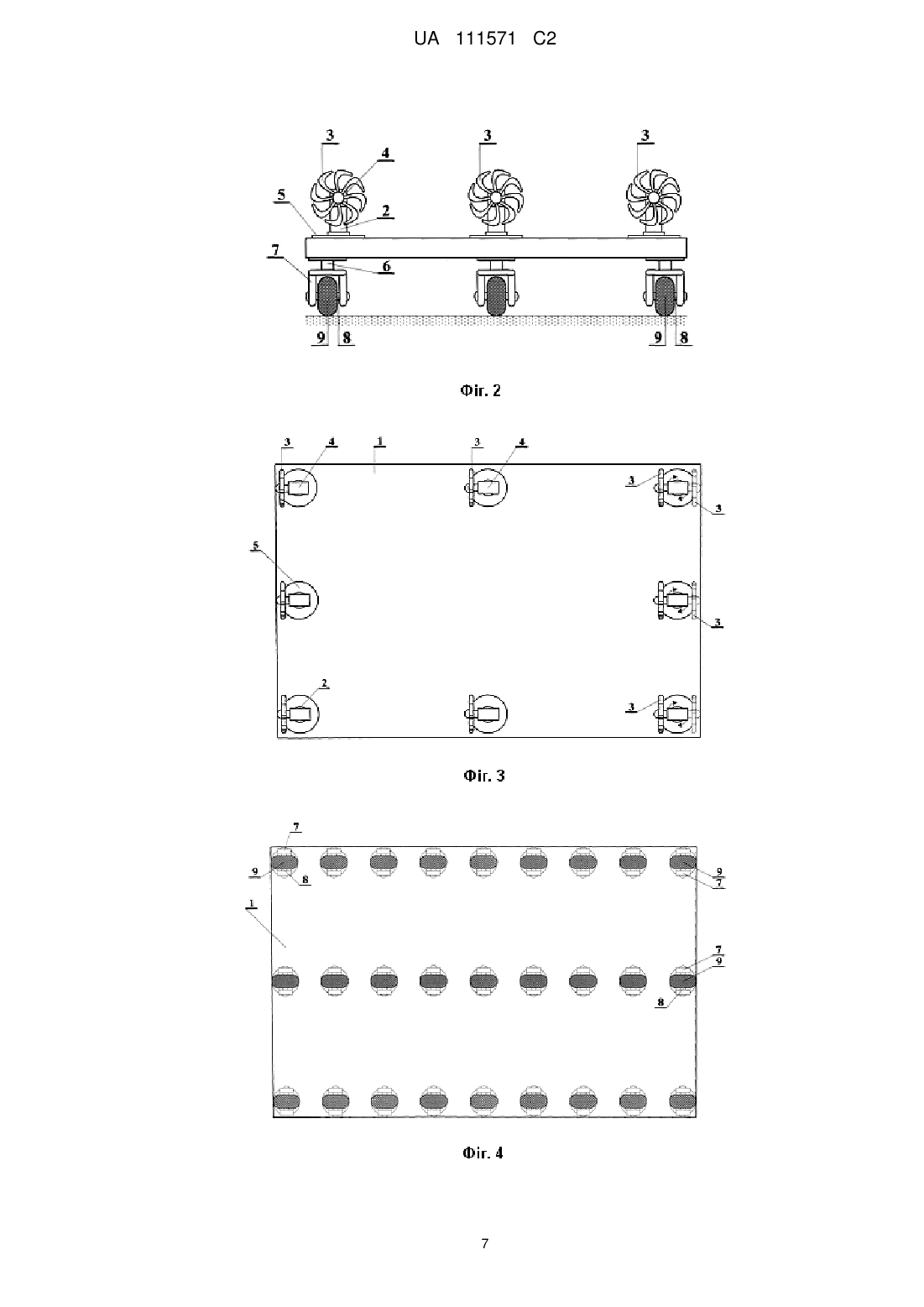
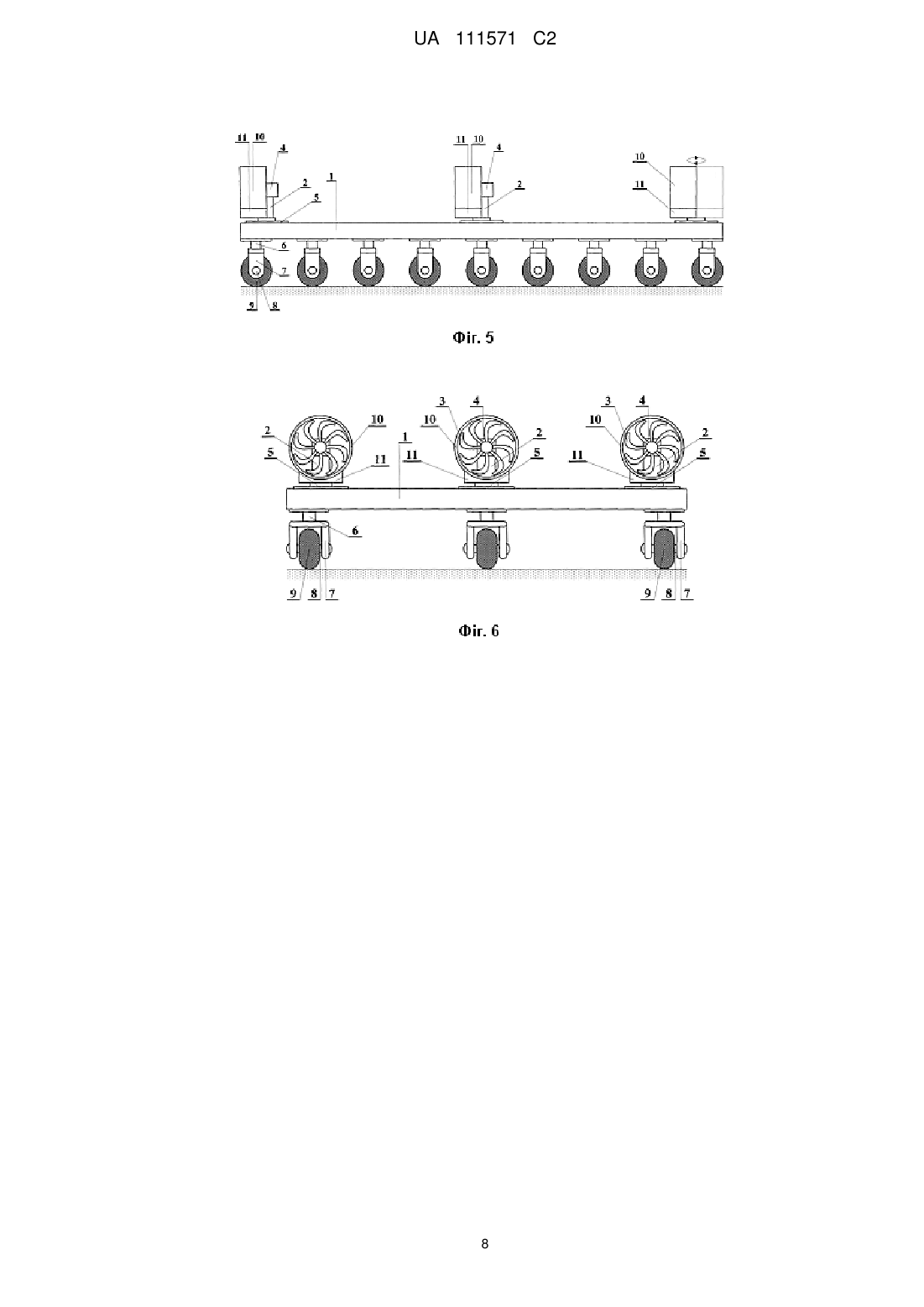
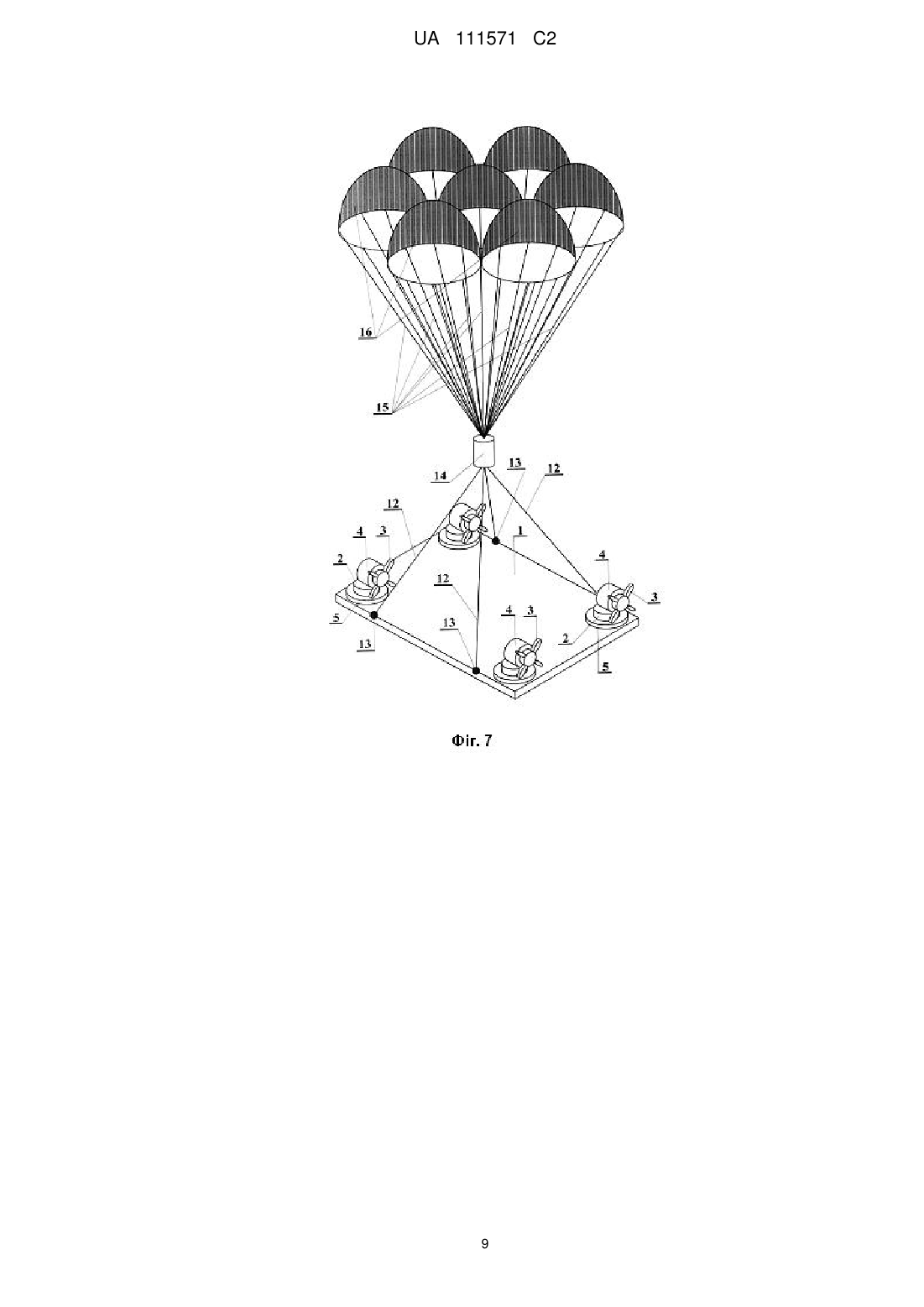
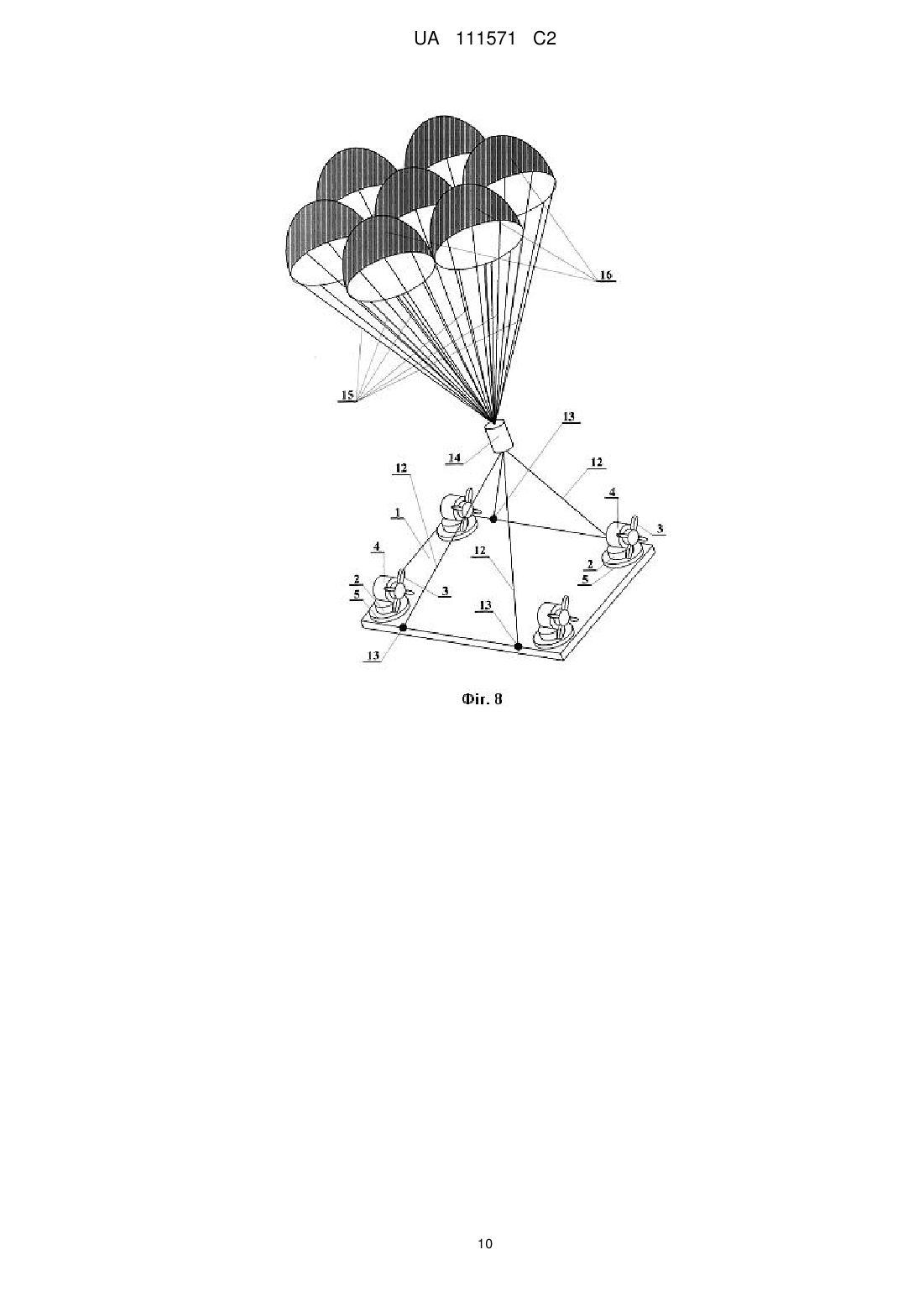
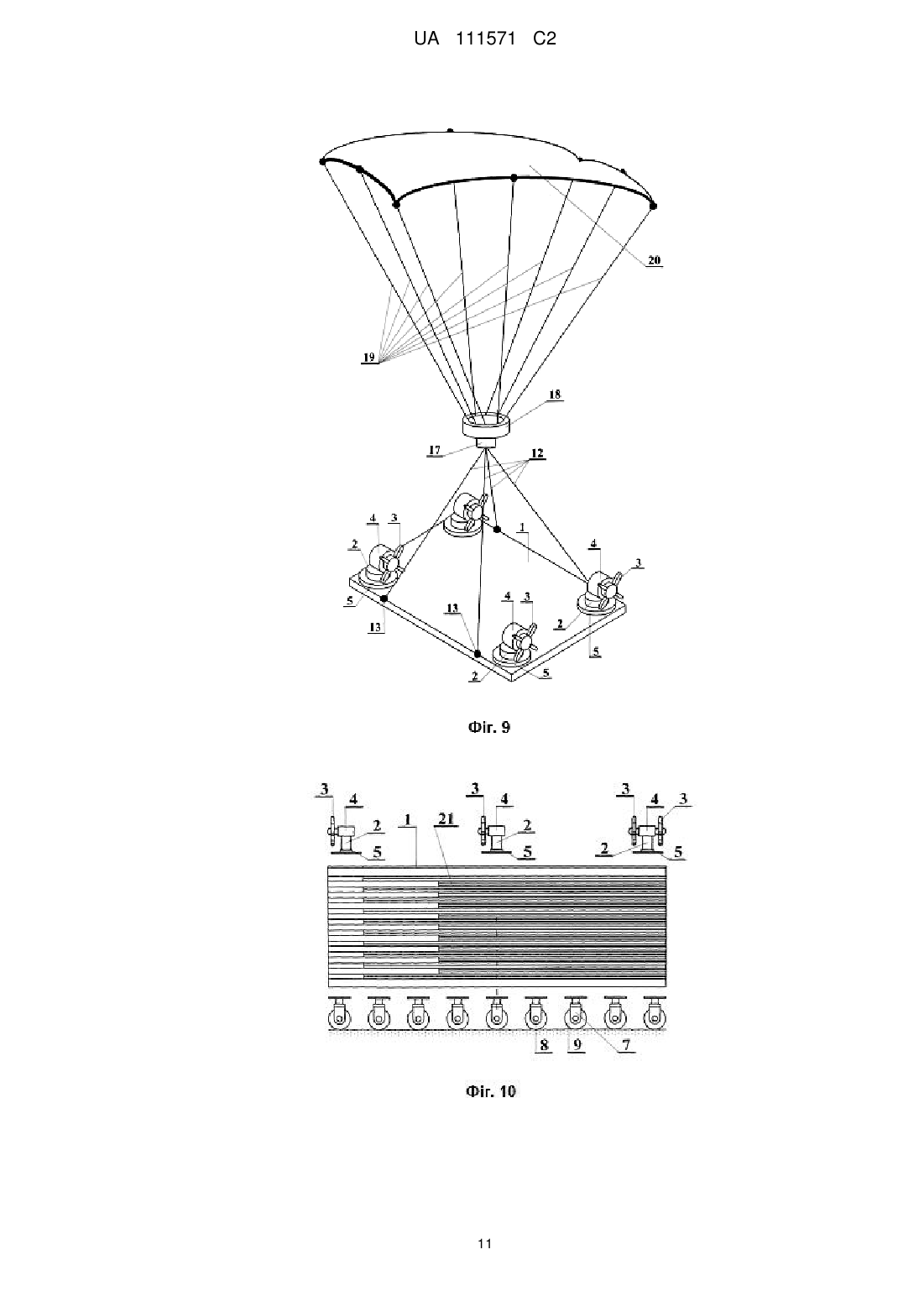
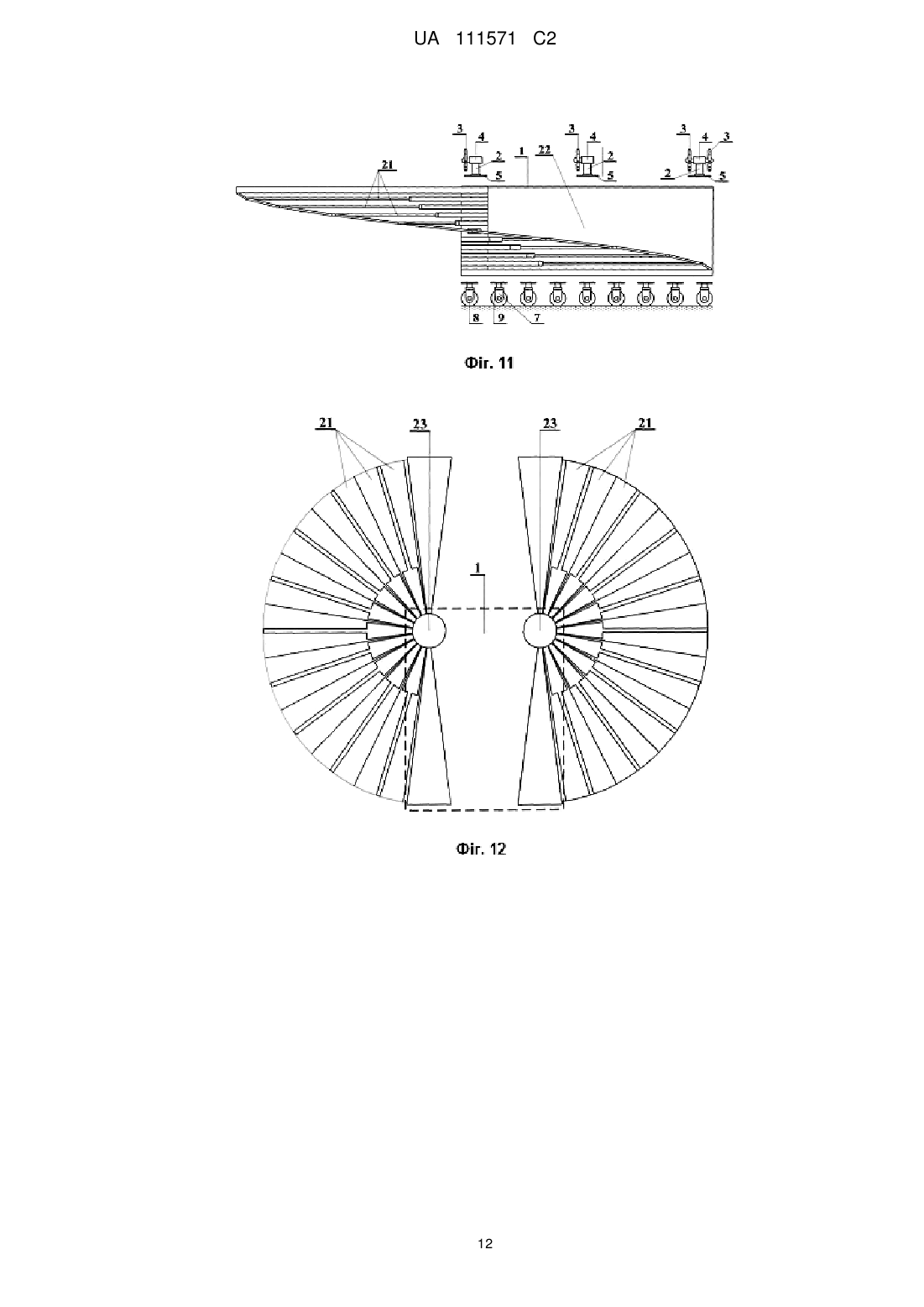
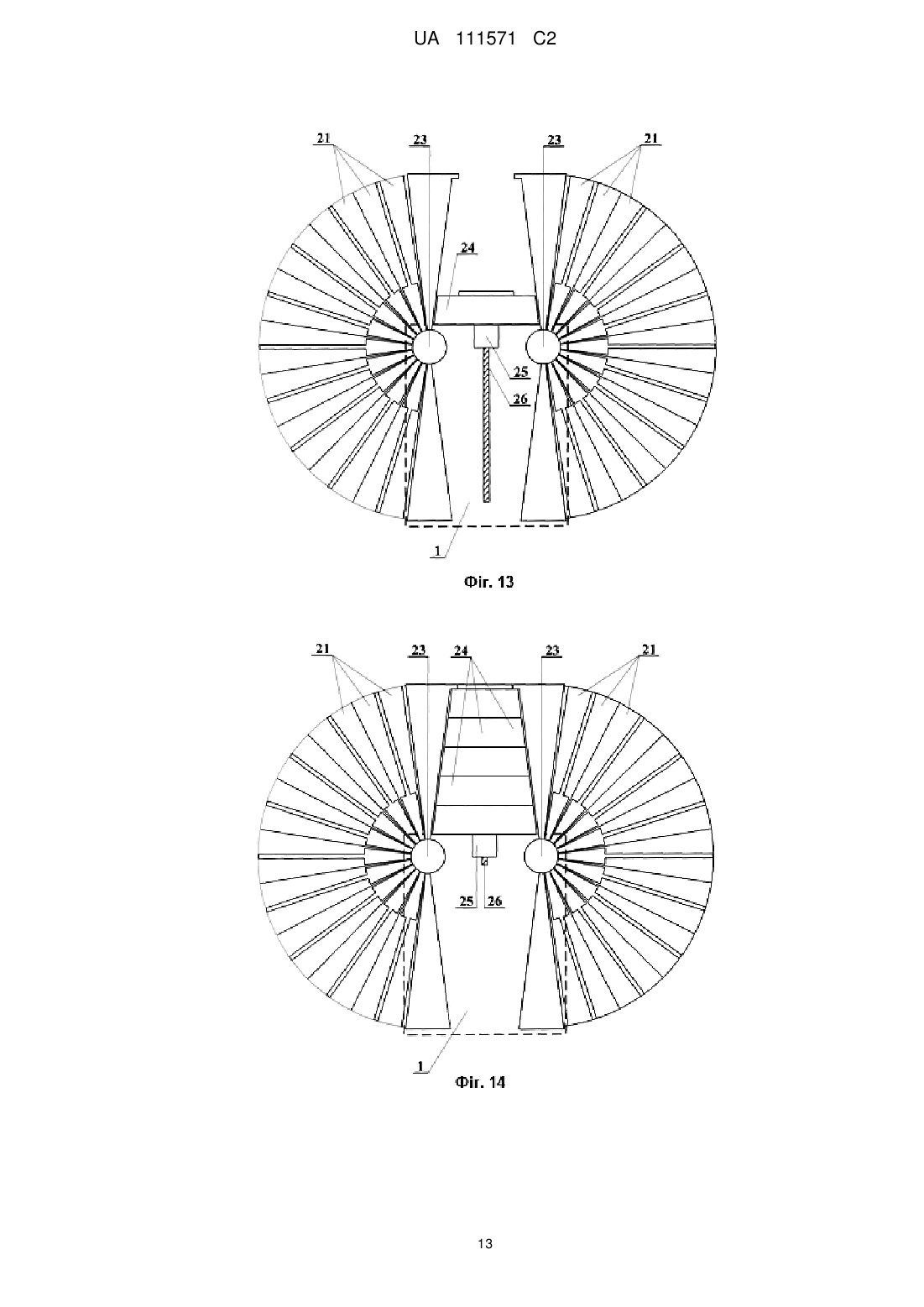
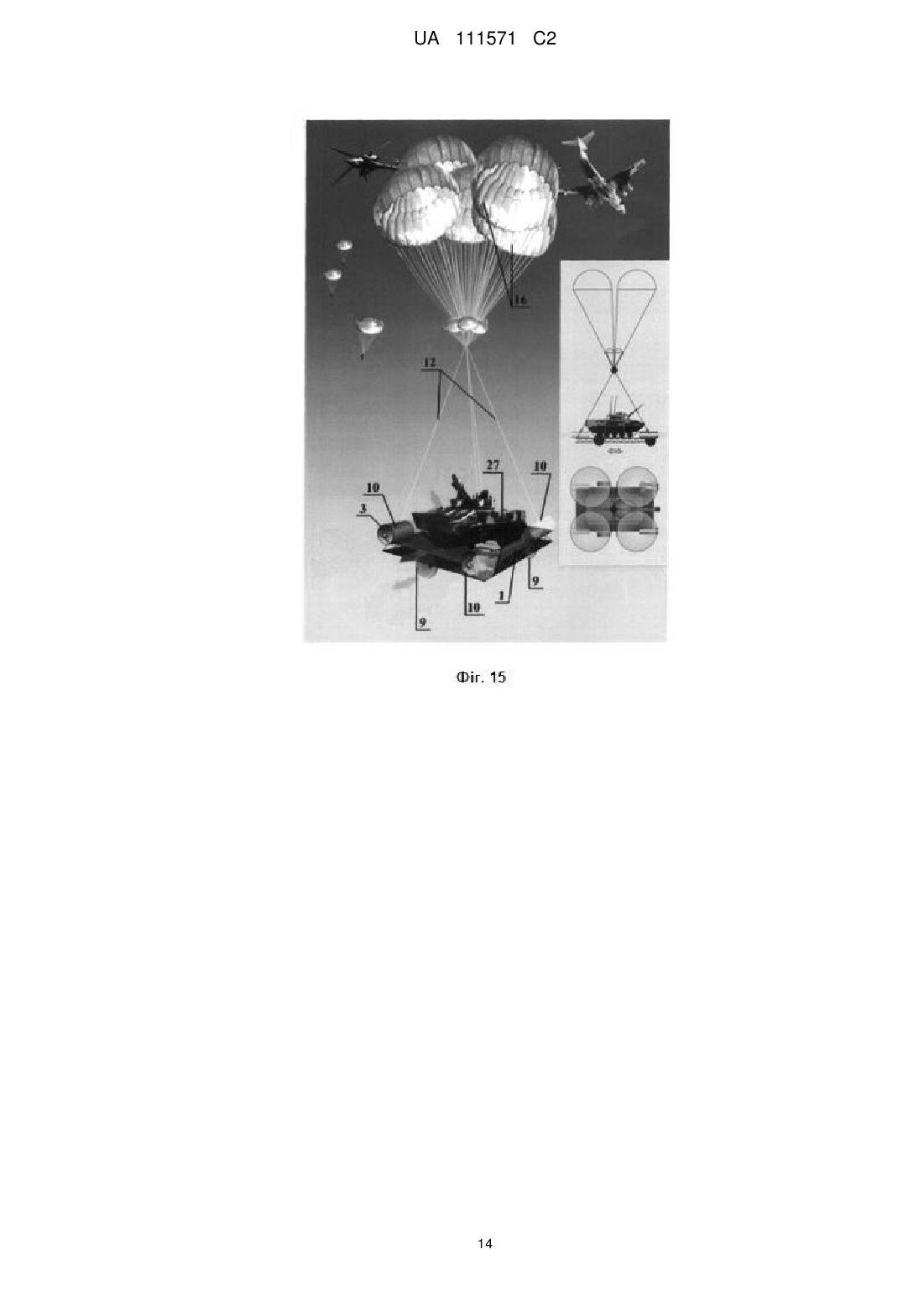
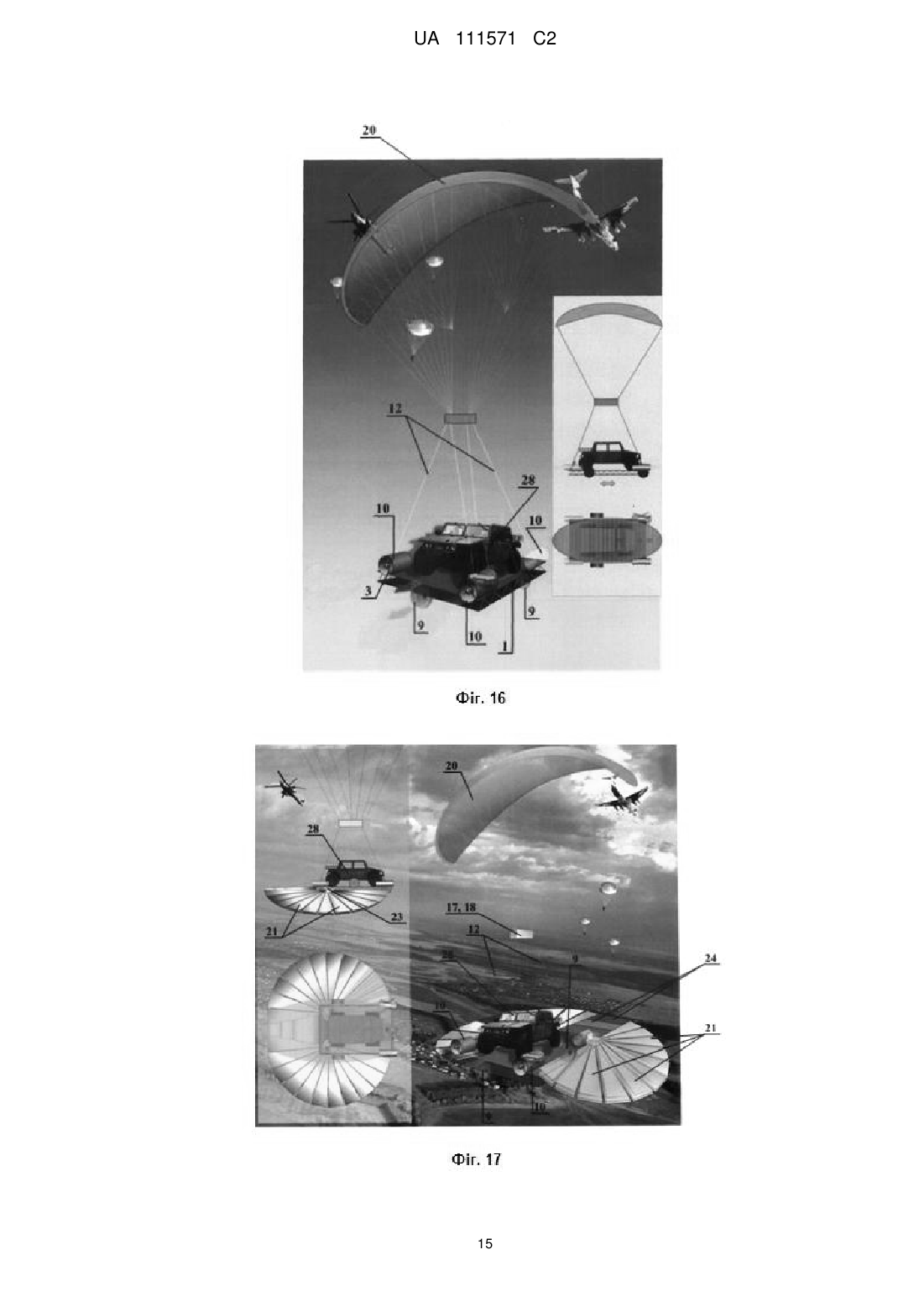
Реферат: Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту належить до військової техніки у вигляді рухливих військових робототехнічних агрегатів і установок. Автономну дистанційно керовану модульну транспортну платформу супроводження повітряного десанту виконано у вигляді одного або комплекту енергетично автономних транспортних агрегатів, - функціональних блоків-модулів високого рівня, - пласких платформ із захищеними порожнинами для розміщення автономного джерела UA 111571 C2 (12) UA 111571 C2 електричного енергоживлення, опорними (приводними) колесами повноприводного електромеханічного рушія колісного, гусеничного або комбінованого типу, пристосуваннями для жорсткої фіксації десантованого устаткування і затискачами для під'єднування уповільнювачів зниження десантованого вантажу, причому по периметру зовнішньої верхньої поверхні вказаної платформи встановлені поворотні кронштейни з електричними двигунами, на валах яких закріплені повітряні звичайні або серповидні гвинти-пропелери тягового або штовхального типу, причому окремі платформи об'єднані за допомогою жорсткого або гнучкого механічного зв'язку, а кожен автономний транспортний агрегат обладнаний системою відеоспостереження для відеозв'язку з наземним оператором і комплектом виконавчого облаштування системи дистанційного керування з землі і повітря. Винахід дозволяє застосовувати платформу у значному віддаленні точки викиду десанту від планового розташування місця наземної операції. UA 111571 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області військової техніки, а саме до спеціалізованих військових авіадесантованих транспортних роботизованих агрегатів і комплексів, призначених для дистанційно керованого супроводження в повітрі і на земній поверхні повітрянодесантних операцій бойового і спеціального призначення з метою організації ефективної прихованої протидії противнику, який має розвинені системи транспорту, розвідки і озброєння, що забезпечені сучасним облаштуванням зовнішнього безпровідного управління і зв'язку. Автономна дистанційно керована транспортна модульна платформа супроводження повітряного десанту, яку запропоновано в справжній заявці на видачу патенту України, по своїй принциповій суті являє собою новий зразок озброєння і військової техніки, яку спеціально створено для жорсткого, швидкого і надійного придушення бойової активності ворога, що надійно оснащений сучасною високотехнологічною зброєю, добре тренований і підготовлений до реальних бойових дій. Детальне вивчення сучасної технічної і спеціальної літератури по темі показало, що нині у відкритих виданнях, на жаль, відсутні відомості про спеціалізовані автономні дистанційно керовані модульні транспортні платформи супроводження повітряного десанту. У той же самий час, одній з найбільш суттєвих тенденцій, що характеризують можливі актуальні напрями змін в тактиці використання високомобільних військ стала необхідність різкого збільшення відстаней і, відповідно, часу між моментами покидання літаків десантниками і відділення від повітряного транспорту вантажів, що забезпечують їх бойові дії, і надійним приземленням людей і вантажів в завчасно вказаному для успішного завершення операції місці. При аналізі положення, що створилося, з цієї точки зору, стає повністю очевидним, що, якщо для бійців-десантників технічне рішення, у буквальному розумінні слова, лежить на поверхні у вигляді спеціальної парашутної техніки - парапланів, що керовані вручну особисто самими десантниками, то у випадку, наприклад, бойової транспортної техніки і інших подібних вантажів супроводження десанту проблема, з технічної точки зору, стає принципово абсолютно іншою. Отже, необхідно розробити і запропонувати нові способи уповільнення в повітрі темпів зниження вантажних платформ, що десантують, наприклад з транспортною технікою, озброєнням і іншими вантажами, без яких виконання поставлених бойових завдань і спеціальних операцій стає практично неможливим. Конструктивно найбільш близькими до військової роботизованої техніки, яку запропоновано в справжній заявці на видачу патенту України, є технічні рішення згідно з патентами України: № 95730 від 25.08.2011 р. на винахід під назвою "Модульноструктурована допоміжна наземна бойова робототехнічна машина прихованого супроводження розвідників" (Поповіченко О.В., Толстой О.В., Клименко В.М., Беліков В.Т., Васильев В.В.); № 99033 від 10.07.2012 р. на винахідпід назвою "Модульно структурована допоміжна наземна бойова робототехнічна машина супроводження бронетанкового озброєння і техніки" (Беліков В.Т., Борисюк М.Д., Дяченко О.Ф., Клименко В.М, Магерамов Л.Κ. - Α., Толстой О.В., Янчик О.Г.); № 99214 від 25.07.2012 р. на винахід під назвою "Бойова модульна наземна робототехнічна машина постійного моніторингу і охорони (захисту) стратегічних об'єктів та кордонів держави" (Толстой О.В., Клименко В.Μ, Коваль А.А., Беліков В.Т., Грачов М.М., Васильєв В.В.). Загальним принципом конструктивної побудови практично усіх подібних бойових робототехнічних машин (БРТМ), описаних у вказаних вище патентах, є те, що їх структура складається з одного або комплекту механічно об'єднаних транспортних агрегатів функціональних блоків-модулів вищого рівня, кожен з яких виконаний на базі пласкої платформи із закріпленими на ній функціональними блоками-модулями нижчих рівнів. В той же час, співавтори патентної заявки упевнено встановили, що як безпосередній прототип автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту в максимальному ступені того, що відповідає суті представлених матеріалів, необхідно узяти вантажну платформу, що входить у конструктив парашутної платформи П-7 і плоску металеву конструкцію, що обладнано знімними колесами, які встановлюються на час підготовчих транспортних і навантажувально-розвантажувальних робіт (см. "Повітрянодесантна підготовка", підручник для військових ВНЗ, ч. II / М. - Воениздат. 1985, 480 с.). Комплект знімних коліс служить для транспортування платформи за тягачем зі швидкістю до 30 км/год. по бетонованій дорозі і до 10 км/год. по ґрунтових дорогах, а так само для завантаження платформи по літакових трапах у вантажний відсік літака. Габарити вантажної платформи: довжина lПЛ 4,2 м ; ширина bПЛ 2,6 м ; товщина ПЛ 0,2...0,3 м . Як уповільнювачі зниження таких платформ після їх відділення від літака використовуються багатокупольні гальмівні парашутні системи (см. с. 9…12 вказаного підручника). Платформа 1 UA 111571 C2 5 10 15 20 25 30 35 40 45 50 55 прототип і уповільнювач швидкості її зниження у вигляді багатокупольної гальмівної системи, як показав виконаний нами детальний аеродинамічний і конструктивний аналіз, мають ряд істотних конструктивних недоліків, які, в принципі не дозволяють різко збільшити відстань її самостійного зниження після відділення від повітряного транспортного апарата, у якому розміщено платформу з вантажем. Вказані недоліки полягають в тому, що вантажна платформа-прототип має порівняно низьку в аеродинамічному плані площу, яка не дозволяє розраховувати на виникнення скільки-небудь помітних значень підйомної сили, що сприяє подовженню відстані її планерування; вантажну платформу-прототип після приземлення не може бути використано як активний транспортний і бойовий засіб супроводження повітряного десанту; після відділення платформи-прототипу від повітряного транспортного апарата, що несе її, аж до її механічного контакту з ґрунтом вона стає повністю некерованою внаслідок відсутності в її складі апаратури дистанційного керування і виконання сигналів, що управляють. У автономній дистанційно керованій модульній транспортній платформі супроводження повітряного десанту, що є об'єктом повітряного десантування, яку запропоновано, завдання усунення вказаних вище недоліків прототипу вирішене таким чином. Пропонується виконати автономну дистанційно керовану модульну транспортну платформу супроводження повітряного десанту у вигляді щонайменше одного чи комплекту механічно об'єднаних і енергетично автономних транспортних агрегатів - блоків-модулів вищого рівня, до складу кожного з яких включено пласку платформу із захищеними порожнинами з автономним джерелом електричного енергоживлення електрохімічного (акумулятори, паливні елементи), накопичувального (суперконденсатори) або комбінованого типу, перетворювачами електроенергії, які безпосередньо живлять силові та керуючі пристрої; містить кронштейни для кріплення опорних (приводних) коліс, пристосування для жорсткої фіксації десантованого устаткування і затискачі для під'єднування уповільнювачів зниження десантованого вантажу, причому по периметру зовнішньої верхньої поверхні вказаної платформи встановлені поворотні кронштейни з електричними двигунами, на валах яких закріплені повітряні звичайні або серповидні гвинти-пропелери тягового або штовхального типу, а на її нижній поверхні поворотні кронштейни з опорними колесами повноприводного електромеханічного рушія колісного, гусеничного або комбінованого типу, в обіддя опорних коліс якого вбудовані обернені приводні широкорегульовані електричні двигуни прямого, безпосереднього тягового електричного приводу рушія, причому окремі платформи об'єднані за допомогою жорсткого або гнучкого механічного зв'язку, а кожен автономний транспортний агрегат обладнаний системою відеоспостереження для відеозв'язку з наземним оператором і комплектом виконавчого облаштування системи дистанційного керування з землі і повітря. З метою підвищення коефіцієнта корисної дії повітряних гвинтів, а так само рівня механічної захищеності функціональних блоків-модулів, забезпечених повітряними гвинтами відкритого типу, запропоновано укласти вказані гвинти в аеродинамічні кільця, використовуючи економічні і експлуатаційні переваги аеродинамічної системи типу імпелер. У зв'язку з тим, що система автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту запропонована для застосування у бойових і спеціальних операціях, що передбачають значні видалення точки викиду десанту від планованого розташування місця наземної операції, як уповільнювачі зниження бойової техніки супроводу повітряного десанту запропоновано використати уповільнювачі зниження парапланного та дельтапланного типів. Аналогічний ефект може бути досягнутий, якщо забезпечити кожну складову автономного транспортного агрегату у вигляді керованої модульної транспортної платформи супроводження повітряного десанту, що десантовані з вантажем або самостійно, віяловою системою висувних складаних площин-крил, розміщених у бічних порожнинах плоских платформ вказаних автономних транспортних агрегатів. Для того, щоб захистити функціональне устаткування автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту, що десантується з вантажем або самостійно, від ушкоджень при жорсткому зіткненні її з ґрунтом при посадці запропоновано встановити на ній таке загальне число опорних коліс кожного з автономних транспортних агрегатів, що входять до її складу, яке визначене значенням питомого показника Nок 2...4 ок / м2 ( Nок - кількість опорних коліс на один квадратний метр площі плоских платформ транспортних функціональних блоків-модулів) при відношенні Dок / bок ( Dок - зовнішній діаметр опорного колеса; bок - ширина шини опорного колеса транспортних функціональних блоків-модулів) що знаходиться в межах 0,8…1,0 при Dок 300 мм . 2 UA 111571 C2 5 10 15 20 25 30 35 40 45 50 55 На кресленнях, що пояснюють конструктивну суть автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту, яку запропоновано, представлені: Фіг. 1 Пласка платформа автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами звичайного або серповидного типів, вигляд збоку; Фіг. 2 Пласка платформа автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами звичайного або серповидного типів, вигляд спереду; Фіг. 3 Пласка платформа автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами звичайного або серповидного типів, вигляд зверху; Фіг. 4 Пласка платформа автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами звичайного або серповидного типів, вигляд знизу; Фіг. 5 Пласка платформа автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з гвинтовим блоком типу імпелер, вигляд збоку; Фіг. 6 Пласка платформа автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з гвинтовим блоком типу імпелер, вигляд спереду; Фіг. 7 Пласка платформа автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами звичайного типу і гальмівним уповільнювачем зниження, аксонометрична проекція (кут нахилу платформи до горизонту 1 0 ); Фіг. 8 Пласка платформа автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами звичайного типу і гальмівним уповільнювачем зниження, аксонометрична проекція (кут нахилу платформи до горизонту 1 20 ); Фіг. 9 Пласка платформа автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами звичайного типу і парапланним уповільнювачем зниження, аксонометрична проекція (кут нахилу платформи до горизонту 1 0 ); Фіг. 10 Розміщення повністю згорнутої віялової системи висувних складаних площин-крил у бічних порожнинах плоских платформ автономних транспортних агрегатів, вигляд збоку; Фіг. 11 Розміщення повністю розгорнутої з бічних порожнин плоских платформ автономних транспортних агрегатів віялової системи висувних складаних площин-крил, вигляд збоку; Фіг. 12 Розміщення повністю розгорнутої з бічних порожнин плоских платформ автономних транспортних агрегатів віялової системи висувних складаних площин-крил, вигляд зверху; Фіг. 13 Розміщення повністю розгорнутої з бічних порожнин плоских платформ автономних транспортних агрегатів віялової системи висувних складаних площин-крил при повністю втягнутих передніх (задніх) стулках, вигляд зверху; Фіг. 14 Розміщення повністю розгорнутої з бічних порожнин плоских платформ автономних транспортних агрегатів віялової системи висувних складаних площин-крил при повністю висунених передніх (задніх) стулках, вигляд зверху; Фіг. 15 Дизайнерське представлення автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами типу імпелер і гальмівним купольним уповільнювачем зниження при куту нахилу платформи до горизонту 1 0 ; Фіг. 16 Дизайнерське представлення автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами типу импелер і парапланным уповільнювачем зниження при куту нахилу платформи до горизонту 1 0 ; Фіг. 17. Дизайнерське представлення автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами типу імпелер, парапланним уповільнювачем зниження і висуненими віяловими площинами при куту нахилу платформи до горизонту 1 0 . 3 UA 111571 C2 5 10 15 20 25 30 35 40 45 50 55 60 Представлена на фігурах 1, 4 в повному об'ємі проекцій пласка платформа 1 автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту обладнана функціональними блоками-модулями 2 зі звичайними або серповидними повітряними гвинтами 3 звичайного або серповидного типів, встановленими безпосередньо на валах широко регульованих електричних двигунів 4. Пласка платформа 1, як показано на фіг. 2, забезпечена серповидними повітряними гвинтами 3, які не лише підвищують ККД гвинта, але і сприяють значному зниженню рівня його шуму, що дуже важливо при проведенні прихованих десантних операцій. Функціональні блоки-модулі 2 встановлені на поворотних елементах 5 торцевих електричних двигунів повороту блоківмодулів 2 навколо своїх вертикальних осей. Ці торцеві електродвигуни повороту блоків-модулів 2 навколо своїх вертикальних осей на фіг. 1, 4 не показані. На вертикальних осях 6 жорстко закріплені кронштейни 7 з горизонтальними осями 8, на яких встановлені опорні колеса 9 платформ 1. Частина або усі опорні колеса 9 платформ 1 мають бути забезпечені оберненими приводними широко регульованими електричними двигунами прямого, безпосереднього тяглового електричного приводу, утворюючи автономний тяговий рушій платформи. Ці тягові двигуни вбудовані безпосередньо в обіддя опорних коліс 9. Наявність у платформи 1 постійно встановлених опорних коліс і тягового рушія, що забезпечує її прямій, безпосередній привод принциповим чином відрізняє запропоновану автономну дистанційно керовану транспортну модульну платформу супроводження повітряного десанту від прототипу. На фігурах 1 і 3 тонкими лініями показане одне з можливих положень повороту крайнього правого функціонального блоку-модуля 4 з повітряним гвинтом 3 відносно вертикальній осі, коли останній розгорнутий на 180° відносно первинного положення. На фігурах 5 і 6 у вигляді збоку і спереду представлена плоска платформа автономного транспортного агрегату запропонованої автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з гвинтовим функціональним блоком-модулем типу імпелер. Тут серповидний повітряний гвинт 3 з серповидними лопатями, поміщений в аеродинамічне кільце 10, жорстко закріплене в дуговому посадочному місці 11, що відповідає зовнішньому діаметру аеродинамічного кільця 10. Дугове посадочне місце 11 встановлене на поворотному елементі 5 торцевого електричного двигуна повороту. Наявність аеродинамічного кільця 10 забезпечує зменшення рівня кінцевого обтікання лопатей, зниження шумності і підвищення загального рівня безпеки. На фіг. 5, як і раніше, на фігурах 1 і 3, тонкими лініями показане одне з можливих положень повороту крайнього правого функціонального блока-модуля імпелера відносно вертикальної осі, коли останній розгорнутий на 180° відносно первинного положення. На фігурах 7 і 8 в аксонометричних проекціях представлена пласка платформа автономного транспортного агрегату автономного транспортного агрегату автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту зі звичайними повітряними гвинтами і багатокупольним гальмівним уповільнювачем зниження при кутах нахилу платформи до горизонту 1 0 і 1 20 . Платформа 1 забезпечена чотирма функціональними поворотними блоками-модулями 2, що несуть приводні двигуни 4, на осях роторів яких закріплені повітряні гвинти 3. Функціональні блоки-модулі 2 закріплені на поворотних елементах 5 торцевих двигунів, розміщених у внутрішніх порожнинах платформи 1 і тому на фігурах 7 і 8 не показані. Троси 12 підвісної системи закріплені в замках 13 платформ 1 і нижній площині інтегратора 14, до верхньої площини якого сходяться стропи 15 куполів 16 багатокупольного гальмівного уповільнювача зниження. На фіг. 9 так само в аксонометричній проекції показана пласка платформа автономного транспортного агрегату запропонованої автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту зі звичайними повітряними гвинтами і парапланним уповільнювачем зниження при горизонтальному положенні платформи 1. Тут інтегратор 14 виконано з двох елементів - нижнього 17 і верхнього 18. Троси 12 підвісної системи закріплені в замках 13 платформ 1 і нижній площині елемента 17 інтегратора. Система строп 19 параплана 20 закріплена в замках верхнього елемента 18 інтегратора з можливістю зміни їх довжин для регулювання часу планерування парашутної системи після відділення від літака. На фігурах з 9 по 14, включно, в різних фазах експлуатації представлена конструктивна кінематична схема віялової системи висувних складаних площин-крил 21 плоскої платформи 1 автономного транспортного агрегату запропонованої автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту, наявність якої дозволяє різко збільшити поверхню вказаної платформи 1, що забезпечує відповідне 4 UA 111571 C2 5 підвищення планерувальних можливостей системи в цілому. Так, при габаритах у плані платформи 1 lПЛ 5 м ; bПЛ 2 м площа платформи - SПЛ 10 м2 , повне розгортання віялоподібної системи висувних складаних площин-крил 21, розміщених у бічних порожнинах 22 плоских платформ 1 автономних транспортних агрегатів, збільшує сумарну поверхню платформи 1 з повністю розгорнутими крилами на SKP 10 15 20 25 30 35 40 45 50 55 2lПЛ 2 2 5 2 78,5 м 2 , (1) 4 4 де lПЛ - довжина платформи 1, тобто практично у дев'ять разів. Очевидно, що у відповідному ступені зростають можливості планерування системи "Уповільнювач зниження платформа 1". Розміщення повністю згорнутої віялової системи висувних складаних площин-крил 21 у бічних порожнинах 22 по обидві сторони пласкої платформи 12 автономного транспортного агрегату у вигляді збоку представлено на фіг. 10. На фіг. 11 так само у вигляді збоку показано розміщення повністю розгорнутою з бічних порожнин 22 пласкої платформи 1 автономного транспортного агрегату віялової системи висувних складаних площин-крил 21. На фіг. 12 розміщення повністю розгорнутої з бічних порожнин 22 плоских платформи 1 автономного транспортного агрегату віялової системи висувних складаних площин-крил 21 дано у вигляді зверху. Для висунення і втягування висувних складаних площин-крил 21 використовується приводні механізми 23. З метою підвищення функціональних можливостей запропонованої системи висувних складаних площин-крил 21 шляхом зменшення лобового повітряного опору платформи 1 при планеруванні запропоновано доповнити вказану систему бічних висувних складаних площинкрил 21 передніми висувними стулками 24, які в повністю втягнутому і повністю висуненому станах представлені на фігурах 13 і 14, відповідно. Для управління висуненням і втягуванням висувних стулок 24 використовується привод типу "електродвигун 25 - гвинт 26". На фігурах 15, 16 і 17 показані дизайнерські представлення автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту з повітряними гвинтами типу імпелер, гальмівним купольним і парапланним уповільнювачами зниження при куту нахилу платформи до горизонту, рівному 1 0 . Остання фігура дана у положенні повного розгортання віялових бічних складаних площин, що складаються з крил 21, які в складеному положенні розміщені у бічних порожнинах 22 (см. фіг. 11). На платформі 1 жорстко закріплений десантований вантаж у вигляді бойової машини десанту 27 або бойового баггі 28. Запропонована автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту працює таким чином. В процесі попередньої підготовки платформи до бойового десантування на ній має бути встановлений і випробуваний повний комплект функціональних блоків-модулів, передбачений для надійного виконання усього об'єму поставлених бойовим наказом завдань. Особлива увага має бути приділена відеосистемі спостереження, системам зв'язку і управління спуском платформи з боку наземних операторів. В процесі виконання пуско-налагоджувальних робіт на платформі 1 жорстко закріплюється десантований вантаж у вигляді, наприклад, бойової машини 27 десанту або бойового баггі 28. Після закінчення усього комплексу необхідних підготовчих робіт платформа з повністю готовою до десантування вибраною системою уповільнення зниження завантажується в літак. Після повного набору висоти і отримання команди на відділення від транспортного літака автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту відбувається її викид, повне механічне відділення від літака і перехід на зв'язок і управління з боку зовнішніх наземних операторів. Останні, у разі потреби, запускають в хід систему повітряних гвинтів, регулюють швидкість їх обертання і кут повороту. Після регульованого із землі приземлення платформи 1 на опорні колеса 9 рушія десантники, що приземлилися завчасно, знімають вантаж і продовжують далі використовувати платформу 1 як автономний тяговий модуль бойового супроводження повітряного десанту. На відміну від існуючих систем, що використовують вантажні платформи одноразово, пропонована конструкція автономної дистанційно керованої модульної транспортної платформи супроводження повітряного десанту припускає її регулярне бойове і учбове використання. ФОРМУЛА ВИНАХОДУ 1. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту, що є об'єктом повітряного десантування, що складається зі щонайменше 5 UA 111571 C2 5 10 15 20 25 30 35 одного функціонального блока-модуля, який виконаний як пласка платформа та має можливість бути механічно об′єднаним один з одним, яка відрізняється тим, що кожний, що входить в неї, енергетично автономний транспортний агрегат - функціональний блок-модуль високого рівня складається з пласкої платформи із захищеними порожнинами з автономним джерелом електричного енергоживлення електрохімічного, накопичувального або комбінованого типу, перетворювачами електроенергії, які безпосередньо живлять силові та керуючі пристрої; містить кронштейни для кріплення опорних (приводних) коліс, пристосування для жорсткої фіксації десантованого устаткування і затискачі для під'єднання уповільнювачів зниження десантованого вантажу, причому по периметру зовнішньої верхньої поверхні вказаної платформи встановлені поворотні кронштейни з електричними двигунами, на валах яких закріплені повітряні звичайні або серповидні гвинти-пропелери тягового або штовхального типу, а на її нижній поверхні - поворотні кронштейни з опорними колесами повноприводного електромеханічного рушія колісного, гусеничного або комбінованого типу, в обіддя опорних коліс якого вбудовані обернені приводні широкорегульовані електричні двигуни прямого, безпосереднього тягового електричного приводу рушія, причому окремі платформи об'єднані за допомогою жорсткого або гнучкого механічного зв'язку, а кожен автономний транспортний агрегат обладнаний системою відеоспостереження для відеозв'язку з наземним оператором і комплектом виконавчого облаштування системи дистанційного керування з землі і повітря. 2. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту за п. 1, яка відрізняється тим, що повітряні гвинти, встановлені на зовнішній верхній поверхні платформи кожного автономного транспортного агрегату поміщені в аеродинамічне кільце, утворюючи аеродинамічну систему типу імпелер. 3. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту за п. 1, яка відрізняється тим, що уповільнювачі зниження десантованих з вантажем або самостійно автономних транспортних агрегатів виконані на основі конструктивних елементів парапланного або дельтапланного типів. 4. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту за пп. 1 і 2, яка відрізняється тим, що кожен з тих, що входять до її складу десантованих з вантажем або самостійно автономних транспортних агрегатів, забезпечений віяловою системою висувних складаних площин-крил, розміщених у бічних порожнинах пласких платформ вказаних автономних транспортних агрегатів. 5. Автономна дистанційно керована модульна транспортна платформа супроводження повітряного десанту за п. 1, яка відрізняється тим, що загальна кількість опорних коліс щонайменше одного з автономних транспортних агрегатів, що входять до її складу, та десантується з вантажем або самостійно, визначається величиною питомого показника 2 Νок=2…4 ок/м (Νок - кількість опорних коліс на один квадратний метр площі плоских платформ візків-модулів) при відношенні Dок/bок (Dок - зовнішній діаметр опорного колеса; bок - ширина шини опорного колеса транспортних функціональних блоків-модулів) що знаходиться в межах 0,8…1,0 при Dок300 мм. 6 UA 111571 C2 7 UA 111571 C2 8 UA 111571 C2 9 UA 111571 C2 10 UA 111571 C2 11 UA 111571 C2 12 UA 111571 C2 13 UA 111571 C2 14 UA 111571 C2 15 UA 111571 C2 Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 16
ДивитисяДодаткова інформація
Назва патенту англійськоюAutonomous remote controlled transport modular platform for following up airborne descend
Автори англійськоюAdamov Yurii Ivanovych, Huliak Oleh Viktorovych, Danyk Yurii Hryhorovych, Kravchuk Oleh Ivanovych, Kovalishyn Serhii Semenovych, Belikov Viktor Tryfonovych
Назва патенту російськоюАвтономная дистанционно управляемая транспортная модульная платформа сопровождения воздушного десанта
Автори російськоюАдамов Юрий Иванович, Гуляк Олег Викторович, Даник Юрий Григорьевич, Кравчук Олег Иванович, Ковалишин Сергей Семенович, Беликов Виктор Трифонович
МПК / Мітки
МПК: B64D 1/00, B64D 17/00, F41H 7/00
Мітки: модульна, транспортна, супроводження, повітряного, дистанційно, автономна, платформа, десанту, керована
Код посилання
<a href="https://ua.patents.su/18-111571-avtonomna-distancijjno-kerovana-transportna-modulna-platforma-suprovodzhennya-povitryanogo-desantu.html" target="_blank" rel="follow" title="База патентів України">Автономна дістанційно керована транспортна модульна платформа супроводження повітряного десанту</a>
Самозавантажувальна-розвантажувальна транспортна платформа

Номер патенту: 100492
Опубліковано: 27.07.2015
Автори: Давиденко Володимир Миколайович, Гушер Максим Євгенович, Лупинос Віктор Вікторович
МПК: A01D 90/00
Мітки: транспортна, платформа, самозавантажувальна-розвантажувальна
Формула / Реферат:
Cамозавантажувальна-розвантажувальна транспортна платформа, що містить: раму, колеса, навантажувальну платформу, яка відрізняється тим, що обладнана з обох боків гідрофікованими арочними рамами, які збирають рулони до впирання в задні відкидні упори, розміщених на бічних рамах, бокові рами виконані з можливістю при переїзді трохи підніматись, а при транспортуванні вкладатись на раму з опорними колесами, і блокуються гідрофікованим...
Платформа автомобільних ваг модульна
Номер патенту: 68759
Опубліковано: 10.04.2012
Автор: Полуектов Дмитро Володимирович
МПК: G01G 19/02
Мітки: платформа, модульна, ваг, автомобільних
Формула / Реферат:
Платформа автомобільних ваг модульна, яка містить один або декілька з'єднаних модулів з торцевими опорними вузлами та просторовим металевим каркасом, яка відрізняється тим, що просторовий каркас кожного модуля складається з двох слідових балок, по одній на кожну колію, які виконані в поперечному розрізі у вигляді ферми та кожна з яких складається з двох повздовжніх балок - швелерів, настилу з металевого листа, певної кількості перемичок,...
Модульна автономна нашоломна система цілевказування та індикації
Номер патенту: 69212
Опубліковано: 16.08.2004
Автори: Прибилов Георгій Якович, Терещук Антоній Олексійович, Кравченко Володимир Йосипович, Михайлик Олександр Костянтинович, Таранушко Георгій Іванович
МПК: G02B 27/30, G02B 23/02
Мітки: автономна, цілевказування, модульна, нашоломна, індикації, система
Формула / Реферат:
1. Модульна автономна нашоломна система цілевказування та індикації, що містить нашоломний візирний пристрій, оптико-електронні скануючі блоки та електронний блок, нашоломний візирний пристрій, розташований на шоломі оператора, його вхід під'єднаний з допомогою електричних ланцюгів до виходу електронного блока, входи якого також з допомогою електричних ланцюгів під'єднані до виходів скануючих блоків, розміщених таким чином, що випромінювачі,...
Розбірна модульна платформа для установки по збору відходів
Номер патенту: 107475
Опубліковано: 12.01.2015
Автори: Бозіо Мішель-Жан, Пего-Ожьє Жан-Жак
МПК: B65F 1/00
Мітки: установки, платформа, розбірна, збору, відходів, модульна
Формула / Реферат:
1. Пристрій для розвантаження відходів, виконаний у вигляді піднятого помосту (1) з пандусами (2), який відрізняється тим, що він включає: декілька поставлених в ряд несучих елементів (3), що формують підняту горизонтальну поверхню (48), та які включають дві вертикальні стійки (12), що опираються на поверхню (8), яка має коефіцієнт деформації, що залежить від використання установки по збору відходів, яка передбачає та забезпечує рух пішоходів...
Спосіб підвищення розвідзахищеності повітряного ретранслятора
Номер патенту: 52572
Опубліковано: 25.08.2010
Автори: Слєпов Лев Іванович, Чупахін Сергій Анатолійович, Щипанський Павло Володимирович, Кас'яненко Максим Вікторович
МПК: H04B 7/00
Мітки: спосіб, розвідзахищеності, підвищення, ретранслятора, повітряного
Формула / Реферат:
Спосіб підвищення розвідзахищеності повітряного ретранслятора, при якому вибирають транспортну платформу, що містить ретрансляційну радіостанцію, визначають маршрут та висоту баражування, здійснюють запуск транспортної платформи, забезпечують набір висоти транспортної платформи і виводять транспортну платформу за допомогою навігаційного устаткування у зону баражування, який відрізняється тим, що додатково аналізують параметри прийнятого...
Попередній патент: Формувач періодичної послідовності кодових серій імпульсів програмованими параметрами
Наступний патент: Критий вагон
Випадковий патент: Спосіб виготовлення фанери