Модульна автономна нашоломна система цілевказування та індикації
Номер патенту: 69212
Опубліковано: 16.08.2004
Автори: Кравченко Володимир Йосипович, Терещук Антоній Олексійович, Таранушко Георгій Іванович, Михайлик Олександр Костянтинович, Прибилов Георгій Якович
Формула / Реферат
1. Модульна автономна нашоломна система цілевказування та індикації, що містить нашоломний візирний пристрій, оптико-електронні скануючі блоки та електронний блок, нашоломний візирний пристрій, розташований на шоломі оператора, його вхід під'єднаний з допомогою електричних ланцюгів до виходу електронного блока, входи якого також з допомогою електричних ланцюгів під'єднані до виходів скануючих блоків, розміщених таким чином, що випромінювачі, розташовані на шоломі оператора, знаходяться постійно в полі зору обох скануючих блоків, при цьому нашоломний візирний пристрій містить коліматорний візир з напівпрозорим віддзеркалювальним елементом, розташованим в безпосередній близькості від ока оператора і на нього виводиться сколімоване в безмежність зображення хроматичних прицільної та сигнальної марок, яка відрізняється тим, що всі її блоки виконані у вигляді автономних електронно-обчислювальних модулів, обмін інформацією між якими здійснюється з допомогою цифрових завадозахищених каналів зв'язку, для чого до складу кожного з модулів введено схему керування та відповідний адаптер цифрового каналу зв'язку, а до складу нашоломного візирного пристрою додатково введено передавач та приймач, які утворюють безпровідний канал зв'язку для обміну інформацією між модульною нашоломною системою цілевказування та індикації та контрольно-перевіряльною апаратурою або технологічним обладнанням.
2. Модульна нашоломна система цілевказування та індикації за п. 1, яка відрізняється тим, що як канал зв'язку використовується стандартний інтерфейс RS-485.
3. Модульна нашоломна система цілевказування та індикації за п. 1, яка відрізняється тим, що для зв'язку з контрольно-перевіряльною апаратурою та технологічним обладнанням до її складу введено цифровий радіоканал зв'язку.
4. Модульна нашоломна система цілевказування та індикації за п. 1, яка відрізняється тим, що для зв'язку з контрольно-перевіряльною апаратурою та технологічним обладнанням до її складу введено цифровий оптико-електронний тепловий канал зв'язку.
5. Модульна нашоломна система цілевказування та індикації за п. 4, яка відрізняється тим, що як приймач безпровідного каналу зв'язку використовується фотодіод схеми автоматичного регулювання яскравості марок нашоломного візирного пристрою, а як передавач використовується один із випромінюючих діодів нашоломного візирного пристрою.
Текст
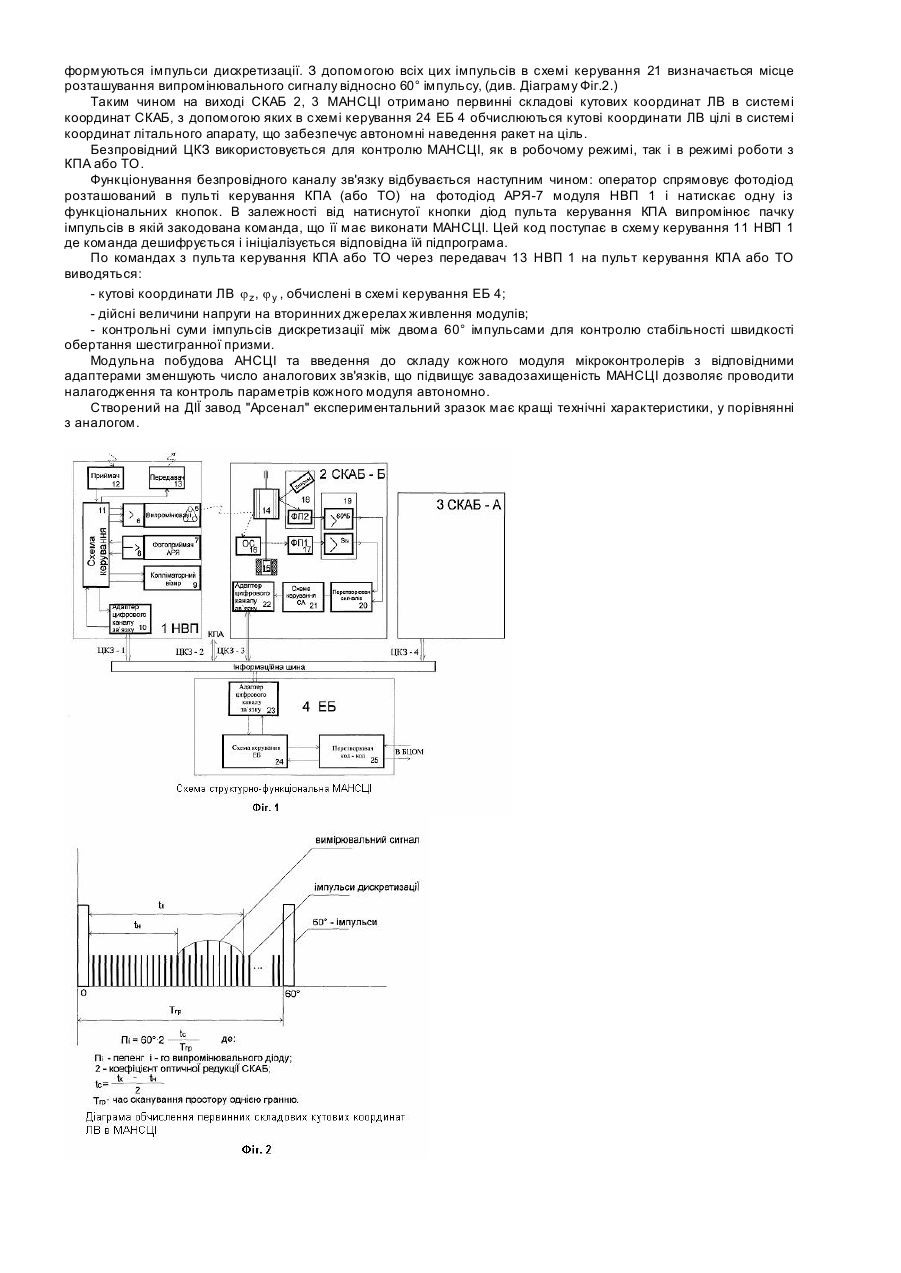
Винахід належить до засобів керування пристроями та приладами, які мають електромеханічні приводи, а більш конкретно, до нашоломних систем ціле вказування та індикації (наприклад, система ціле вказування оператора, наразі льотчика). Відомий цілий ряд оптико-електронних нашоломних систем цілевказування та індикації (НСЦІ), створених на заводі «Арсенал»,відомих під назвами «Щель», «Щ-ЗУМ-1», «Таурус», «Обзор-800М», а також НСЦІ з хроматичними прицільною та сигнальною марками. Всі вони мають однакове функціональне призначення: забезпечують візування вибраних об'єктів, формування первинних складових кутових координат лінії візування (ЛВ) та передачу їх в бортову цифрову обчислювальну машину (або автономний процесор) для обчислення кутових координат ЛВ цілі, а також для індикації оператору інформаційних сигналів та команд керування. Всі зазначені НСЦІ мають аналогічні складові: нашоломний візирний пристрій (НВП), скануючи блоки (СКАБ) та електронний блок (ЕБ), в якому відбувається формування та обробка сигналів. Відрізняються вказані НСЦІ глибиною обробки сигналу та схемами зв'язку з суміжними системами. Принцип дії таких НСЦІ полягає в наступному: з допомогою НВП формується (створюється) лінія візування вибраного об'єкту (пряма, яка проходить через око оператора візирну марку та об’єкт). З допомогою СКАБ визначаються пеленги (кут в горизонтальній площині між опорним напрямком - вісь Х системи координат СКАБ, та проекцією випромінювача на горизонтальну площину) випромінювачів - діодів інфрачервоного випромінювання, які розташовані на шоломі оператора, наразі на захисному шоломі льотчика, і утворюють реперний трикутник. В ЕБ по отриманих пеленгах обчислюються первинні складові кутови х координат ЛВ в системі координат СКАБ, з допомогою яких в бортовій цифровій обчислювальній машині (або в автономному процесорі) обчислюються кутові координати ЛВ в системі координат літального апарату, які потім передаються на приводи керованих пристроїв у вигляді керуючих сигналів. Це дає змогу оператору, суміщуючи поворотом голови марку з вибраним об'єктом, орієнтувати керований пристрій в напрямку на вибраний об'єкт. Інформаційні сигнали та команди керування, які формуються в ЕБ, або системі керування об'єктом по результатах обробки та аналізу параметрів керованого пристрою, виводяться на напівпрозорий віддзеркалювальний елемент, розташований в безпосередній близькості від ока оператора і індиціюються з допомогою різноманітного сполучення стану двох а хроматичних або хроматичних марок ( безперервне світіння або блимання з певною частотою). (Дивись, наприклад, опис НСЦІ «Щ-ЗУМ-1», видавництво заводу « Арсенал»,). Найбільш близькою за призначенням до заявлюваної НСЦІ по сукупності ознак і досягаємих технічних властивостях є НСЦІ, з двома хроматичними марками, яка містить нашоломний візирний пристрій, оптикоелектронні скануючі блоки та електронний блок, нашоломний візирний пристрій розташований на шоломі льотчика, його вхід під'єднаний з допомогою електричних ланцюгів до виходу електронного блоку, входи якого також з допомогою електричних ланцюгів під'єднані до виходів скануючих блоків, розташованих таким чином, що випромінювачі, розташовані на шоломі льотчика, знаходяться постійно в полі зору обох СКАБів, при цьому НВП містить коліматорний візир з напівпрозорим відзеркалювальним елементом, розташованим в безпосередній близькості від ока льотчика, на який виводяться сколімовані в безмежність зображення прицільної та сигнальної марок. (Див. бюллетень "Укрпатенту" №10, 2002 р. патент №50587, 15.10.02, 602В23/10). Ця НСЦІ вибрана в якості прототипу. До причин, які перешкоджають досягненню вказаної нижче якості, належить те, що вказана НСЦІ має єдину схему електричну принципову. Ця електросхема розподілена на електронно-обчислювальні вузли територіально розміщені в різних конструктивних блоках, зв'язок між якими здійснюється з допомогою електричних провідників по яких передаються аналогові сигнали. Така побудова НСЦІ призводить до того, що кількість провідників аналогових сигналів, якими з'єднуються блоки між собою, а також з контрольно-перевіряльною апаратурою (КПА) та технологічним обладнанням (ТО) дуже велика, що знижує завадозахищеність НСЦІ, викликає складнощі при її налагоджені, регулюванні та контролі, як в процесі виготовлення, так і в процесі експлуатації. При розробці заявлюємого технічного рішення вирішувалось завдання підвищення завадозахищенності НСЦІ за рахунок скорочення кількості провідників аналогових сигналів шляхом створення автономних електроннообчислювальних модулів, обмін інформацією між якими, а також з іншими приладами та системами здійснюється з допомогою спеціально організованих цифрових завадозахищених каналів зв'язку, а також спрощення технології налагодження, регулювання та контролю параметрів блоків і НСЦІ в цілому, як в процесі виробництва, так і в процесі експлуатації. Для розв'язання поставленого завдання у відомій нашоломній системі ціле вказування та індикації, яка містить нашоломний візирний пристрій, оптико-електронні скануючі блоки та електронний блок, нашоломний візирний пристрій розташований на шоломі оператора, його вхід під'єднаний з допомогою електричних ланцюгів до виходу електронного блоку, входи якого, також з допомогою електричних ланцюгів, під'єднані до виходів скануючих блоків, розміщених таким чином, що випромінювачі, розташовані на шоломі оператора, знаходяться постійно в полі зору обох скануючих блоків, при цьому нашоломний візирний пристрій містить в собі коліматорний візир з напівпрозорим віддзеркалювальним елементом, розташованим в безпосередній близькості від ока оператора, і на нього виводяться сколімовані в безмежність зображення прицільної та сигнальної марок виконаних хроматичними, всі блоки виконані у вигляді автономних електронно-обчислювальних модулів, обмін інформацією між якими здійснюється з допомогою цифрових завадозахищених каналів зв'язку (ЦКЗ), а до складу нашоломного візирного пристрою додатково введено приймач і передавач, які утворюють безпровідний канал зв'язку для обміну інформацією між НСЦІ та КПА, або ТО. Більш детально склад, конструктивні особливості та особливості функціонування модульної автономної нашоломної системи цілевказування та індикації (МАНСЦІ) наведені нижче з посиланням на креслення: Фіг.1 - схема структурно-функціональна МАНСЦІ. Фіг.2 - діаграми обчислення первинних складових кутових координат ЛВ в МАНСЦІ. МАНСЦІ фіг.1 містить в собі нашоломний візирний пристрій (НВП) - 1, оптико-електронні скануючі блоки СКАБ-Б - 2, СКАБ-А - 3 та електронний блок (ЕБ) - 4, причому, всі блоки виконані у вигляді автономних електронно-обчислювальних модулів. Обмін інформацією між модулями, а також з КПА та ТО здійснюється з допомогою цифрових завадозахищених каналів зв'язку, для чого до складу кожного з модулів введено схему керування та відповідний адаптер ЦКЗ, окрім того, до складу одного з модулів (в даному випадку НВП) введено приймач 12 і передавач 13, які утворюють додатковий безпровідний ЦКЗ для обміну інформацією між МАНСЦІ і КПА або ТО. Модуль НВП1 містить: три випромінювачі (діоди інфрачервоного випромінювання) - 5, які утворюють реперний трикутник на шоломі льотчика, перпендикуляр до якого паралельний лінії візування цілі; три підсилювачі імпульсів струму - 6; фотоприймач АРЯ - 7; двоканальний підсилювач - 8; коліматорний візир - 9; адаптер ЦКЗ - 10; схему керування НВП - 11; приймач - 12; передавач - 13. На випромінювачі 5, у послідовності, яка задається схемою керування 11, через підсилювачі струму 6 подаються імпульси струму в результаті чого діоди випромінюють інфрачервоні (теплові) імпульси, які використовуються для визначення параметрів реперного трикутника. Окрім того, в МАНСЦІ перший випромінювальний діод в режимі роботи з КПА, або ТО, використовується в якості передавача безпровідного ЦКЗ. При цьому в послідовності імпульсів (цифровому коді) цього діоду кодується інформація, яка випромінюється МАНСЦІ в напрямку пульта керування КПА, або ТО. В п ульті керування КПА та ТО розташовно приймач безпровідного ЦКЗ - фотодіод, аналогічний фотодіоду АРЯ-7 НВП-1, який отримані теплові імпульси перетворює в послідовність електричних імпульсів - цифровий код, який поступає в схему керування пульта керування КПА або ТО, де відбувається декодування та обробка інформації отриманої від МАНСЦІ. Фотоприймач АРЯ-7 представляє собою фотодіод. В наведеній МАНСЦІ фотоприймач АРЯ-7 є одночасно приймачем кодів команд, що надходять від пульта керування КПА або ТО. Для цього підсилювач 8 виконано двоканальним. В перший канал при роботі в режимі автоматичного регулювання яскравості марок поступає сигнал пропорційний освітленості навколишнього середовища, (постійна складова сигналу), в другий поступає імпульсна складова сигналу, тобто коди команд, що поступають від передавача розташованого в пульті керування КПА або ТО. Коліматорний візир 9, такий же, як і в аналогу. На нього, у відповідності з командами схеми керування 11, виводяться зображення ПМ та C M з допомогою яких індиціюються сигнали та команди. Адаптер ЦКЗ-10 реалізований на мікросхемі ADM 1485 узгоджує амплітуди сигналів інтерфейсу (в МАНСЦІ RS-485) з сигналами схеми керування, та забезпечує їх синхронізацію; Схема керування 11 являє собою мікроконтролер ATmega 128. У відповідності з програмою контролер реалізує ряд функцій: - в робочому режимі формує три послідовності імпульсів, які через підсилювачі 6 поступають на випромінювачі 5; отримує від БЦВМ (через перетворювач код-код 25, схему керування БЕ 24, адаптери ЦКЗ 23 та 10) коди сигналів і команд і забезпечує їх індикацію з допомогою коліматорного візиру 9; - в режимі роботи з КПА та ТО сприймає та розшифровує коди команд які поступають від приймача 12; - організує виконання отриманих команд; - виконує обмін командами і сигналами з іншими модулями МАНСЦІ а також КПА і ТО через відповідні адаптери та схеми керування; формує коди команд та сигнали керування для передавача 12. СКАБ-Б містить 6 - гранну призму -14 з електромагнітним приводом -15, оптичну сис-тему-16, фотоприймач основного каналу ФП1-17, коліматор -18, до складу якого входить випромінювач та фотоприймач ФП2, підсилювачі -19, перетворювач сигналів -20, схему керування СКАБ-Б- 21,.адаптер ЦКЗ-22 Коліматор 18 формує опорні 60° імпульси для чого випромінювач коліматора посилає промінь на грань призми, який віддзеркалившись від грані попадає на фотоприймач коліматора ФП2 внаслідок чого за один оберт призми на виході "60°Б" підсилювачів 19 формується послідовно 6 опорних 60° імпульсів. Одночасно в СКАБ з допомогою призми 14 та ОС 16 формується вузьке (не більше одного градусу) вертикальне миттєве поле зору (МПЗ). Призма 14 безперервно обертаючись навколо своєї вертикальної осі (вісь У системи координат СКАБ) проводить сканування простору цим МПЗ. В моменти проходження МПЗ СКАБ кожного з випромінювачів 5 на виході "SБі" підсилювачів 19 з'являється випромінювальний сигнал, що представляє собою пачку імпульсів випромінювального діоду, який разом з сигналом "60°Б" через перетворювач сигналів 20 поступає на схему керування 21. Схема керування 21 представляє собою мікроконтролер ATmega-128, в якому обчислюються первинні складові кутових координат ЛВ в системі координат СКАБ, (див. Фіг.2) які через адаптер ЦКЗ-22 подаються в ЕБ4. Адаптери ЦКЗ в усіх модулях однакові. ЕБ- 4 містить адаптер ЦКЗ 23, схему керування ЕБ 24, та перетворювач код-код 25. Схема керування ЕБ 24 реалізована на мікроконтролері ATmega 128. У відповідності з заданою програмою, реалізує ряд функцій: - сприймає інформацію від НВП, СКАБ-А, СКАБ-Б, КП А або ТО; - обчислює кутові координати ЛВ j z , j y ; - видає результати обчислення j z , j y через перетворювач код-код 32 в БЦОМ; задає коди контрольних тестови х задач, для контролю модулів та МАНСЦІ; - сприймає команди та сигнали від БЦОМ і передає їх в НВП. Вторинні джерела живлення (на Фіг.1 не наведені), розташовані в кожному модулі. На них подається напруга від бортового джерела 27В. Функціонування МАНСЦІ відбувається наступним чином: при подачі напруги живлення на МАНСЦІ три випромінювачі модуля НВП1, що утворюють реперний трикутник, перпендикуляр до якого паралельний лінії візування цілі, випромінюють імпульси інфрачервоного випромінювання. В оптичному каналі кожного блоку СКАБ 2, 3 з допомогою шестигранної призми 14 та оптичної системи 16 формується вузьке МПЗ. Призма 16 безперервно обертаючись навколо своєї вертикальної вісі (вісь У системи координат СКАБ) проводить сканування простору цим МПЗ. В моменти проходження МПЗ СКАБ кожного з випромінювачів на фотоприймачеві 17 з'являється випромінювальний сигнал, який через підсилювачі 19 подається на перетворювач сигналів 20 де формуються вимірювальні імпульси "SБі", які подаються на схему керування 21. Одночасно в СКАБ з допомогою коліматора 18 формуються опорні 60° імпульси, а в схемі керування 21 формуються імпульси дискретизації. З допомогою всіх цих імпульсів в схемі керування 21 визначається місце розташування випромінювального сигналу відносно 60° імпульсу, (див. Діаграму Фіг.2.) Таким чином на виході СКАБ 2, 3 МАНСЦІ отримано первинні складові кутових координат ЛВ в системі координат СКАБ, з допомогою яких в схемі керування 24 ЕБ 4 обчислюються кутові координати ЛВ цілі в системі координат літального апарату, що забезпечує автономні наведення ракет на ціль. Безпровідний ЦКЗ використовується для контролю МАНСЦІ, як в робочому режимі, так і в режимі роботи з КПА або ТО. Функціонування безпровідного каналу зв'язку відбувається наступним чином: оператор спрямовує фотодіод розташований в пульті керування КПА (або ТО) на фотодіод АРЯ-7 модуля НВП 1 і натискає одну із функціональних кнопок. В залежності від натиснутої кнопки діод пульта керування КПА випромінює пачку імпульсів в якій закодована команда, що її має виконати МАНСЦІ. Цей код поступає в схему керування 11 НВП 1 де команда дешифрується і ініціалізується відповідна їй підпрограма. По командах з пульта керування КПА або ТО через передавач 13 НВП 1 на пульт керування КПА або ТО виводяться: - кутові координати ЛВ j z , j y , обчислені в схемі керування ЕБ 4; - дійсні величини напруги на вторинних джерелах живлення модулів; - контрольні суми імпульсів дискретизації між двома 60° імпульсами для контролю стабільності швидкості обертання шестигранної призми. Модульна побудова АНСЦІ та введення до складу кожного модуля мікроконтролерів з відповідними адаптерами зменшують число аналогових зв'язків, що підвищує завадозахищеність МАНСЦІ дозволяє проводити налагодження та контроль параметрів кожного модуля автономно. Створений на ДІЇ завод "Арсенал" експериментальний зразок має кращі технічні характеристики, у порівнянні з аналогом.
ДивитисяДодаткова інформація
Назва патенту англійськоюModular independent helmet-based target designation and indication system
Автори англійськоюMykhailyk Oleksandr Kostiantynovych, Prybylov Heorhii Yakovych, Taranushko Heorhii Ivanovych, Tereschuk Antonii Oleksiiovych
Назва патенту російськоюМодульная автономная нашлемная система целеуказания и индикации
Автори російськоюМихайлик Александр Константинович, Прибылов Георгий Яковлевич, Таранушко Георгий Иванович, Терещук Антоний Алексеевич
МПК / Мітки
МПК: G02B 27/30, G02B 23/02
Мітки: система, модульна, цілевказування, автономна, нашоломна, індикації
Код посилання
<a href="https://ua.patents.su/3-69212-modulna-avtonomna-nasholomna-sistema-cilevkazuvannya-ta-indikaci.html" target="_blank" rel="follow" title="База патентів України">Модульна автономна нашоломна система цілевказування та індикації</a>
Нашоломна система цілевказування та індикації
Номер патенту: 50587
Опубліковано: 15.10.2002
Автори: Терещук Антоній Олексійович, Писарець Володимир Олексійович, Михайлик Олександр Костянтинович, Таранушко Георгій Іванович, Прибилов Георгій Якович, Кравченко Володимир Йосипович
МПК: G02B 27/30, G02B 23/02
Мітки: індикації, нашоломна, система, цілевказування
Формула / Реферат:
1. Нашоломна система цілевказування та індикації містить нашоломний візирний пристрій, оптико-електронні скануючі блоки та електронний блок, нашоломний візирний пристрій розташований на шоломі оператора, його вхід під'єднаний до виходу електронного блока, входи якого під'єднані до виходів скануючих блоків, розташованих таким чином, що випромінювачі, розташовані на шоломі оператора, знаходяться постійно в полі зору обох скануючих блоків, при...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказування для його реалізації
Номер патенту: 47969
Опубліковано: 15.09.2003
Автори: Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович, Черняк Сергій Іванович
МПК: F41G 3/22
Мітки: система, орієнтації, визначення, реалізації, осі, цілевказування, спосіб, нашоломна, візира
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Нашоломна система цілевказування
Номер патенту: 44009
Опубліковано: 15.07.2004
Автори: Попов Віктор Гаврилович, Черняк Сергій Іванович, Бузанов Віктор Іванович
МПК: F41G 3/22
Мітки: нашоломна, цілевказування, система
Формула / Реферат:
Нашоломна система цілевказування, що містить формувач візирної лінії, світловипромінювачі, які розташовані на шоломі, оптико-локаційні блоки, що містять оптичні вимірювальні канали зі скануючими обертальними призмами і датчиками кутів повороту призм, а також обчислювальний пристрій, який відрізняється тим, що оптико-локаційні блоки виконані як оптико-локаційний моноблок із заданою відстанню між скануючими призмами й можливістю їх синхронного...
Нашоломна система цілевказування
Номер патенту: 59434
Опубліковано: 15.09.2003
Автори: Попов Віктор Гаврилович, Черняк Сергій Іванович, Бузанов Віктор Іванович
МПК: F41G 3/22
Мітки: цілевказування, система, нашоломна
Формула / Реферат:
Нашоломна система цілевказування, яка містить формувач візирної лінії і світловипромінювачі, розташовані на шоломі, оптико-локаційні блоки і з’єднаний з ними обчислювальний пристрій, причому оптико-локаційні блоки жорстко з’єднані та встановлені з можливістю сканування бокової поверхні шолома з розташованими на ній світловипромінювачами, яка відрізняється тим, що щонайменше два світловипромінювачі закріплені на першій загальній жорсткій...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказівки для його реалізації
Номер патенту: 47969
Опубліковано: 15.07.2002
Автори: Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович, Черняк Сергій Іванович
МПК: F41G 3/22
Мітки: орієнтації, цілевказівки, визначення, спосіб, осі, нашоломна, візира, система, реалізації
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Попередній патент: Вібраційний транспортер
Наступний патент: Засіб для запобігання та лікування статевого розладу у чоловіків та для загального оздоровлення
Випадковий патент: Пристрій для водоструминного оброблювання гумових шин