Спосіб спрямовування на заправку розірваного волокна для намотування на котушку
Номер патенту: 46789
Опубліковано: 17.06.2002
Автори: Гоук Дуейн Е., Кімбалл Рональд Л., Робертс Кеннет Вільям, Бамгарнер Кірк Паттон, Хлудзінскі Пол Ендрю, Бейкон Крістофер Дж.
Формула / Реферат
1. Спосіб спрямовування на заправку розірваного волокна для намотування на котушку, який полягає в тому, що волокно захоплюють захоплюючим пристроєм, який розташовують у положенні, в якому захоплюючий пристрій автоматично захоплює волокно, що надходить від постачального пристрою після розриву волокна, встановлюють контакт з волокном на ділянці між постачальним пристроєм і захоплюючим пристроєм за допомогою контактуючої частини спрямовуючого пристрою і переміщують волокно у щонайменше одне положення заправки контактуючою частиною, який відрізняється тим, що захопивши волокно, утворюють його натяг між постачальним пристроєм і захоплюючим пристроєм з безперервним прийманням волокна захоплюючим пристроєм і в цей час встановлюють контакт волокна з контактуючою частиною, не перериваючи подачу волокна постачальним пристроєм.
2. Спосіб за п. 1, який відрізняється тим, що волокно є оптичним волокном.
3. Спосіб за п. 2, який відрізняється тим, що постачальний пристрій постачає оптичне волокно із швидкістю щонайменше 30 м/с.
4. Спосіб за п. 1, який відрізняється тим, що у разі виявлення розриву волокна його захоплюють, переміщуючи захоплюючий пристрій з вихідного положення в напрямку розірваного волокна, що рухається.
5. Спосіб за п. 1, який відрізняється тим, що у разі виявлення розриву волокна його захоплюють уведенням в дію захоплюючого пристрою.
6. Спосіб за п. 1, який відрізняється тим, що, захоплюючи волокно, виявляють його присутність у захоплюючому пристрої.
7. Спосіб за п. 1, який відрізняється тим, що волокно спрямовують між захоплюючим і спрямовуючим пристроями за допомогою спрямовуючого елемента.
8. Спосіб за п. 7, який відрізняється тим, що спрямовуючий елемент рухають зі швидкістю, що суттєво дорівнює швидкості волокна.
9. Спосіб за п. 7, який відрізняється тим, що спрямовуючий елемент переміщують відносно захоплюючого пристрою.
10. Спосіб за п. 1, який відрізняється тим, що контактуючу частину переміщують у першому напрямку у бік котушки і у другому напрямку поперек першому напрямку.
11. Спосіб за п. 1, який відрізняється тим, що волокно за допомогою контактуючої частини переміщують у перше положення заправки і у першому положенні проводять його у натяжний пристрій, за допомогою якого натягають волокно, що намотують на котушку.
12. Спосіб за п. 11, який відрізняється тим, що волокно проводять у натяжний пристрій, переміщуючи спрямовуючі елементи натяжного пристрою з положення для намотування у положення, в якому волокно у першому положенні для проводки знаходиться між спрямовуючими елементами, і повертаючи спрямовуючі елементи у положення для намотування.
13. Спосіб за п. 12, який відрізняється тим, що під час проводки волокна у натяжний пристрій спрямовуючі елементи рухають із швидкістю, що суттєво дорівнює швидкості, з якою волокно проводять вздовж спрямовуючих елементів.
14. Спосіб за п. 13, який відрізняється тим, що волокно проводять на котушку, намотують його на котушку і рухають спрямовуючі елементи із швидкістю, що суттєво дорівнює швидкості, з якою волокно намотують на котушку.
15. Спосіб за п. 12, який відрізняється тим, що волокно проводять на котушку, намотують його на котушку і визначають положення одного із спрямовуючих елементів для того, щоб визначити різницю між швидкістю постачання волокна постачальним пристроєм і швидкістю намотування волокна на котушку і виявити розрив волокна.
16. Спосіб за п. 1, який відрізняється тим, що волокно переміщують контактуючою частиною у перше положення для проводки, у першому положенні проводять його у розподільник і за допомогою розподільника розподіляють волокно по котушках.
17. Спосіб за п. 16, який відрізняється тим, що волокно проводять у розподільник, переміщуючи перший і другий спрямовуючі елементи розподільника з положення для намотування у положення, в якому волокно у першому положенні для проводки знаходиться між першим і другим спрямовуючими елементами розподільника, і повертаючи обидва ці спрямовуючі елементи у положення для намотування.
18. Спосіб за п. 17, який відрізняється тим, що волокно проводять у розподільник, рухаючи перший і другий спрямовуючі елементи розподільника із швидкістю, що суттєво дорівнює швидкості проводки волокна на перший і другий спрямовуючі елементи розподільника.
19. Спосіб за п. 18, який відрізняється тим, що волокно проводять на котушку, намотують його на котушку і рухають перший і другий спрямовуючі елементи розподільника із швидкістю, що суттєво дорівнює швидкості намотування волокна на котушку.
20. Спосіб за п. 16, який відрізняється тим, що контактуючу частину спрямовуючого пристрою і розподільник переміщують з відповідних перших положень, у яких контактуюча частина утримує волокно у першому положенні для проводки, а розподільник розташовано для проводки волокна у відповідні другі положення, у яких контактуюча частина і розподільник розташовано для проводки волокна на котушку.
21. Спосіб за п. 20, який відрізняється тим, що волокно у другому положенні проводять на котушку, вводячи його в контакт із заправником у цьому другому положенні.
22. Спосіб за п. 21, який відрізняється тим, що волокно на котушку проводять, переміщуючи його за допомогою заправника в напрямку осі обертання котушки і знімаючи із заправника пристроєм проводки, яким здійснюють проводку волокна на котушці.
23. Спосіб за п. 22, який відрізняється тим, що заправник пересувають по суттєво дугоподібній траєкторії.
24. Спосіб за п. 22, який відрізняється тим, що волокно проводять на котушку, пересуваючи заправник суттєво паралельно осі обертання котушки, щоб уможливити захоплення волокна пристроєм проводки.
25. Спосіб за п. 21, який відрізняється тим, що волокно проводять на котушку, рухаючи заправник із швидкістю, що суттєво дорівнює швидкості проводки волокна.
26. Спосіб за п. 1, який відрізняється тим, що
- волокно проводять у натяжний пристрій, яким натягують волокно під час намотування на котушку і який має необертовий спрямовуючий елемент і обертовий спрямовуючий елемент;
- волокно проводять у розподільник, який розподіляє волокно під час намотування на котушку і який має перший і другий спрямовуючі елементи;
- спрямовують волокно необертовим спрямовуючим елементом, розміщуючи його у спрямовуючій дорожці цього елемента, яка лежить, по суті, на першій лінії;
- спрямовують волокно обертовим спрямовуючим елементом, розміщуючи його у спрямовуючій дорожці цього елемента, яка лежить, по суті, на першій лінії;
- змінюють напрямок подачі волокна поворотом обертового елемента навколо осі, що визначається першою лінією;
- спрямовують волокно від обертового елемента першим спрямовуючим елементом розподільника, розміщуючи волокно у спрямовуючій дорожці другого спрямовуючого елемента розподільника, яка лежить, по суті, на другій лінії;
- заводять волокно на котушку другим спрямовуючим елементом розподільника, розташовуючи волокно у спрямовуючій дорожці першого спрямовуючого елемента розподільника, яка лежить, по суті, на другій лінії;
- пересувають розподільник, по суті, паралельно осі обертання котушки, розподіляючи волокно на котушці; і
- повертають перший спрямовуючий елемент розподільника навколо осі, що визначається другою лінією, під час пересування розподільника, що розподіляє волокно.
27. Спосіб за п. 26, який відрізняється тим, що підтримують заздалегідь обумовлене розміщення обертового спрямовуючого елемента і першого спрямовуючого елемента розподільника відносно спільної прямої лінії.
28. Спосіб за п. 1, який відрізняється тим, що волокно спрямовують на першу або другу котушку.
29. Спосіб за п. 28, який відрізняється тим, що волокно переміщують контактуючою частиною у перше положення проводки між першою та другою котушками.
30. Спосіб за п. 29, який відрізняється тим, що волокно у першому положенні проводки спрямовують загалом перпендикулярно до лінії, що перетинає осі обертання першої і другої котушок.
31. Спосіб за п. 28, який відрізняється тим, що
- волокно у першому положенні проводки проводять у розподільник, який розподіляє його для намотування на одну з двох котушок; і
- переміщують контактуючу частину спрямовуючого пристрою і розподільник із відповідних перших положень, у яких контактуюча частина підтримує волокно у першому положенні проводки, а розподільник займає положення проводки, у відповідні другі положення, у яких контактуюча частина і розподільник підтримують волокно у другому положенні для проводки волокна на одну з двох котушок.
32. Спосіб за п. 31, який відрізняється тим, що у разі розриву волокна під час намотування його на одну з двох котушок,
- якщо до розриву волокно намотували на другу котушку, його проводять на першу котушку, розташовуючи перший заправник у другому положенні проводки на боці волокна, що ближчий до другої котушки, переміщуючи перший заправник до контакту з волокном і далі до осі обертання першої котушки, а потім за допомогою першого пристрою проводки, знімаючи волокно з першого заправника; і
- якщо до розриву волокно намотували на першу котушку, його проводять на другу котушку, розташовуючи другий заправник у другому положенні проводки на боці волокна, що ближчий до першої котушки, переміщуючи другий заправник до контакту з волокном і далі до осі обертання другої котушки, а потім за допомогою другого пристрою проводки знімаючи волокно з другого заправника.
33. Спосіб за п. 31, який відрізняється тим, що
- у разі намотування волокна на другу котушку, при її наповненні до бажаного рівня, волокно переводять на першу котушку, розташовуючи його у положенні для переведення на першу котушку за допомогою розподільника, і звідти, переміщуючи до осі обертання першої котушки першим заправником, який вводять в контакт з волокном з боку другої котушки, а потім за допомогою першого пристрою проводки, знімаючи з першого заправника;
- у разі намотування волокна на першу котушку, при її наповненні до бажаного рівня, волокно переводять на другу котушку, розташовуючи його у положенні для переведення на другу котушку за допомогою розподільника, і звідти, переміщуючи до осі обертання другої котушки другим заправником, який вводять в контакт з волокном з боку першої котушки, а потім за допомогою другого пристрою проводки, знімаючи з другого заправника.
Текст
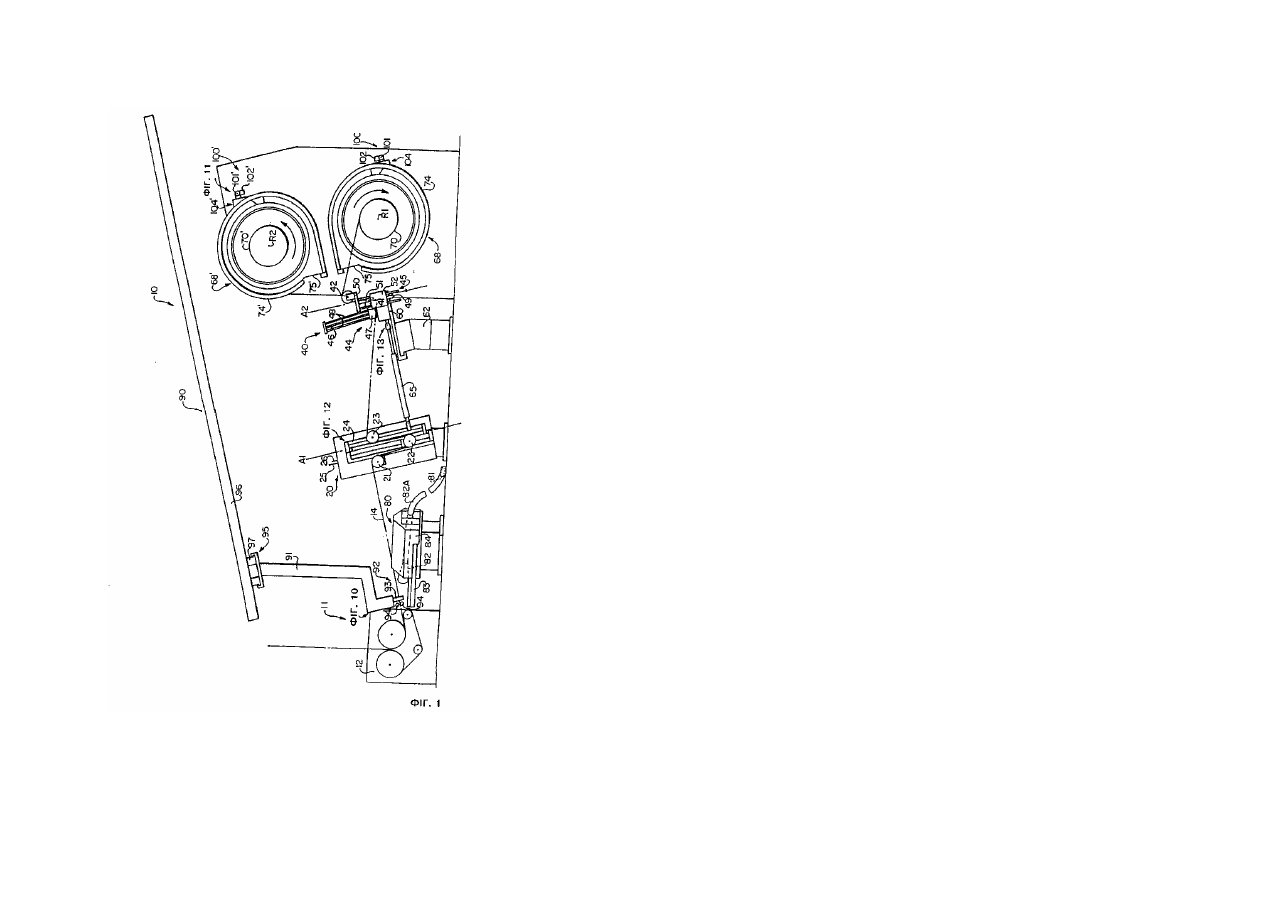
Винахід стосується способу і апарату для автоматичного натягування і намотування волокна на котушку і, зокрема, способу і апарату для автоматичного натягування і намотування оптичного хвилепровідного волокна на котушку, коли це волокно виготовляється волочінням. Рівень техніки Оптичні хвилепровідні волокна (оптичні волокна) є засобами передачі, які використовують у оптичних системах зв'язку. Найчастіше оптичні волокна виготовляють відомими способами, які включають волочіння оптичного волокна з заготовки у волочильній печі. Намотуючий апарат намотує одержане волочінням оптичне волокно на котушки. Звичайні намотувальні апарати потребують небажано частого втручання оператора. Наприклад, якщо під час намотування на відомих одно- та багатошпиндельних намотувальних апаратах оптичне волокно рветься, оператор має проводити волокно у пристрій вручну. Крім того, оскільки волочильні печі продовжують виготовляти оптичне волокно незалежно від робочого стану намотувального апарату, значну кількість оптичного волокна буде втрачено, якщо проводка не буде виконана швидко після розриву або заповнення котушки. Можливість затримки для проводки є серйозною вадою одно- та багатошпиндельних намотувальних апаратів, оскільки така затримка завжди виникає, коли оператор знімає котушку з шпинделя і замінює її новою. Ці вади відомих намотувальних апаратів стають ще більш виразними з огляду на технологічний прогрес, який дозволив підняти швидкість волочіння з семи до більш, як тридцяти м/с. Затримки для проводки призводять до більших втрат волокна за великих швидкостей волочіння. Крім цього, великі швидкості волочіння створили нові проблеми. Звичайні намотувальні апарати, призначені для низьких швидкостей волочіння, можуть пошкодити оптичне волокно, що рухається з великою швидкістю. Ці недоліки характерні і для способу, наведеного у вибраному в якості прототипу патенті США 5322228, згідно з яким запропоновано спосіб .'перевірки оптичного волокна, а також пристрій для здіснення цього способу, який включає набір роликів для регулювання натягу волокна та підтримуючих роликів, і в якому є ролик для перевірки волокна з метою обриву та видалення ділянки оптичного волокна низької міцности, використовуючи силу натягу волокна. Цей ролик розташовано між повідним валом, навкруги якого обертається оптичне волокно, та котушки, на яку намотується оптичне волокно, що подається з вказаного повідного валу. До пристрою включено також усмоктувальні пристрої для захоплення волокна, що розташовані нижче по шляху волокна вказаного повідного валу та вище - вказаної котушки. Спосіб включає підхоплення волокна захоплючим пристроєм, переймання та пересування волокна для подальшої проводки, але потребує зупинки подачі оптичного волокна при його обриві, вивільнення кінця волокна з усмоктувального пристрою і проведення його через шлях подачі волокна для закріплення на котушці, на яку воно намотується. Головним недоліком способу є необхідність зупинки установки після обриву волокна, що особливо небажано при виготовленні волокна волочінням внаслідок неможливості зупинення цього технологічного процесу. Крім цього, великі швидкості волочіння створили нові проблеми. Звичайні намотувальні апарати, призначені для низьких швидкостей волочіння, можуть пошкодити оптичне волокно, що рухається з великою швидкістю. Суть винаходу Задачею винаходу є створення автоматичних способу і апарату для намотування. Іншою задачею винаходу є створення способу і апарату для намотування, які забезпечують швидку проводку, мінімізуючи цим втрати оптичного волокна. Ще однією задачею винаходу є створення способу і апарату для намотування, які не пошкоджують оптичне волокно, що рухається з великою швидкістю. Додаткові задачі і переваги винаходу частково викладено у описі, що наведено далі, частково вони можуть бути одержані як висновок з опису або з практики використання. Для того, щоб вирішити перелічені задачі, винахід передбачає використання поліпшеного способу позиціонування для проводки розірваного волокна, яке безперервно надходить від постачального пристрою, для намотування на котушку. Спосіб передбачає стадію підхоплення волокна захоплюючим пристроєм шляхом примусової подачі волокна з постачального пристрою до захоплюючого, який створює натяг у волокні між постачальним і захоплюючим пристроями, причому захоплюючий пристрій займає положення, яке після розриву волокна забезпечує переймання його захоплюючим пристроєм від постачального шляхом захоплення волокна між постачальним і захоплюючим пристроями позиціонуючим пристроєм, який має переймаючу частину, що переймає волокно, дозволяючи одночасно захоплюючому пристрою безперервно захоплювати волокно, і пересувається, щоб пересунути волокно у щонайменше одне положення для проводки. Винахід також пропонує поліпшений вузол позиціонування для проводки розірваного волокна, яке безперервно надходить від постачального пристрою для намотування на котушку. Вузол містить пристрій підхоплення волокна, який захоплює волокно шляхом примусової подачі його від постачального пристрою до захоплюючого, щоб створити у волокні натяг між постачальним і захоплюючим пристроями, причому захоплюючий пристрій займає положення, яке після розриву волокна забезпечує переймання його захоплюючим пристроєм від постачального шляхом захоплення волокна між постачальним і захоплюючим пристроями позиціонуючим пристроєм, який має переймаючу частину, що переймає волокно, дозволяючи одночасно захоплюючому пристрою безперервно захоплювати волокно, і пересувається, щоб пересунути волокно у щонайменше одне положення для проводки. Наведені суть винаходу і детальний опис, що слідує далі, стосуються лише прикладу і не обмежують об'єму винаходу. Супроводжуючі креслення, які є частиною цього документу, ілюструють втілення винаходу і разом з описом призначені для пояснення принципів винаходу. Скорочений опис креслень Фіг.1 містить вигляд збоку бажаного втілення намотувального апарату згідно з винаходом і ілюструє намотування оптичного волокна на першу котушку. Фіг.2 містить вигляд зверху намотувального апарату з фіг.1. Фіг.3 містить вигляд збоку намотувального апарату з фіг.1 і оптичне волокно у першому положенні для проводки. Фіг.4 містить вигляд зверху намотувального апарату з фіг.1 і пересування оптичного волокна у перше положення для проводки. Фіг.5 містить вигляд збоку намотувального апарату з фіг.1 і оптичне волокно у другому положенні для проводки. Фіг.6 містить вигляд зверху частини намотувального апарату з фіг.1 по лінії 6-6 і оптичне волокно у другому положенні для проводки. Фіг.7 містить вигляд збоку частини намотувального апарату з фіг.1 і ілюструє проводку оптичного волокна на першу котушку. Фіг.8 містить вигляд зверху частини намотувального апарату з фіг.1 і ілюструє рух волокноспрямовуючого пристрою. Фіг.9 містить вигляд зверху частини намотувального апарату з фіг.1 і ілюструє взаємодію між натягуючим пристроєм і розподілювачем. Фіг. 10 містить аксонометричну проекцію перехоплюючої частини позиціонуючого пристрою намотувального апарату з фіг. 1. Фіг. 11 містить аксонометричну проекцію волокноспрямовуючого пристрою намотувального апарату з фіг.1. Фіг. 12 містить аксонометричну проекцію натягуючого пристрою намотувального апарату з фіг.1. Фіг. 13 містить аксонометричну проекцію частини розподілювача намотувального апарату з фіг.1. Фіг. 14 містить аксонометричну проекцію розподілювача намотувального апарату з фіг.1. Фіг.15А - 15В містять схематичний вигляд збоку передачі оптичного волокна від першої котушки до другої у намотувальному апараті з фіг.1. Фіг.16А - 16В містять схематичний вигляд збоку передачі оптичного волокна від другої котушки до першої у намотувальному апараті з фіг. 1. Фіг.17А - 17Г містять вигляд зверху переймання оптичного волокна переймаючою частиною позиціонуючого пристрою у намотувальному апараті з фіг.1. Фіг.18 містить аксонометричну проекцію шпиндельного вузла намотувального апарату з фіг.1. Фіг.19 містить аксонометричну проекцію волокноспрямовуючого пристрою і шпиндельного вузла намотувального апарату з фіг.1. Фіг.20 містить блок-схему системи керування намотувальним апаратом з фіг.1. Опис бажаного втілення З посиланнями на креслення далі буде наведено детальний опис бажаного втілення винаходу. Коли це можливо, номери, якими позначено ідентичні або схожі компоненти, повторюються у всіх кресленнях. Намотувальний апарат 10 намотує оптичне волокно 14, яке безперервно надходить від постачального пристрою 11, а саме, волочильної печі (не показана) і ремінного механізму натягу (далі - РМН) 12, який витягує оптичне волокно з волочильної печі. РМН 12 може бути керований відомими засобами, що дозволяє керувати швидкістю виготовлення волокна. Бажано, щоб ця перевищувала 30м/с. Намотувальний апарат 10 має у складі компоненти, які, головним чином, використовуються для намотування оптичного волокна, такі, як пристрій 20 натягу і стеження за швидкістю (натяжний пристрій), розподілювач 40 і перший та другий шпиндельні вузли 68, 68', які обертають першу та другу котушки 70, 70' відповідно. Апарат також має компоненти для спрямовування оптичного волокна - захоплюючий пристрій 80, позиціонуючий пристрій 90 і перший та другий волокноспрямовуючі пристрої 100, 100'. Зрозуміло, що під час роботи намотуючі компоненти взаємодіють з компонентами для спрямовування. Намотуючі компоненти Натяжний пристрій 20 під час намотування натягує оптичне волокно і визначає різницю між швидкістю постачання оптичного волокна постачальним пристроєм 11 і швидкістю намотування цього волокна на котушку. Згідно з фіг.1 натяжний пристрій 20 має (у напрямку уздовж волокна) перший, другий і третій ведучі органи (бажано ролики) 21, 22, 23, які ведуть оптичне волокно. Третій ролик 23 встановлено на поворотному елементі 24, з'єднаному з рамою натяжного пристрою 20, завдяки чому третій ролик 23 може повертатись навколо осі А1 (фіг.9, 12). Другий ролик 22 не може повертатись, але, коли він знаходиться у положенні намотування (як це показано на фіг. 1), може вільно пересуватися відносно першого і третього роликів 21, 23 у приблизно вертикальному напрямку. На другий ролик 22, що вільно рухається, діє сила власної ваги, створюючи цим приблизно постійний натяг оптичного волокна під час намотування. Датчик 25 визначає положення другого ролика по вертикалі. У бажаному втіленні цей датчик є лінійним датчиком положення (деталь No. NNPRBU0195ACOB, Temposonics). Положення другого ролика по вертикалі використовується для визначення різниці між швидкістю постачання оптичного волокна постачальним пристроєм 11 і швидкістю намотування цього волокна на котушку. Знання цього положення необхідне також для виявлення розриву оптичного волокна, оскільки у цьому випадку другий ролик 22 падає до свого нижнього положення у натяжному пристрої 20. Рухаючий механізм 26, бажано безстрижневий пневмоциліндр, пересуває другий ролик 22 відносно першого і третього роликів 21, 23 у положення проводки (фіг.3) для виконання операції проводки, яку буде описано далі. Натяжний пристрій 20 має привідні пристрої 27, 28, 29 (фіг.3), які крутять перший, другий і третій ролики 21, 22, 23 відповідно з швидкістю (тобто, тангенціальною швидкістю поверхні ролика, що контактує з оптичним волокном), що по суті дорівнює швидкості оптичного волокна під час проводки до роликів 21, 22, 23 і під час намотування на першу і другу котушки 70, 70'. Наявність приводів роликів 21, 22, 23 запобігає пошкодженню оптичного волокна під час проводки і забезпечує краще керування натягом під час намотування. Як привідні пристрої бажано використовувати електричні двигуни, оскільки їх швидкістю можна керувати більш точно. Розподілювач 40 під час намотування розподіляє оптичне волокно на котушках 70, 70'. До складу розподілювача входять (у напрямку уздовж волокна) перший і другий ведучі елементи 41, 42, які спрямовують оптичне волокно. У бажаному втіленні ці елементи являють собою ролики. Перший ролик 41 встановлено на поворотному елементі 43, з'єднаному з підтримуючим елементом 60 розподілювача 40, що забезпечує можливість повертання першого ролика 41 навколо осі 42 (фіг.9, 13). Другий ролик 42 не може повертатись і орієнтований загалом перпендикулярно до осей R1, R2 обертання першої і другої котушок 70, 70' (фіг. 9). Згідно з фіг.14 перший та другий рухаючі механізми 44, 45 забезпечують пересування першого і другого роликів 41, 42 відповідно. Бажано, щоб перший рухаючий механізм 44 мав у складі безстрижневий пневмоциліндр 46, який пересуває несучий елемент 47, на якому встановлено перший ролик 41, уздовж стрижнів 48. Пневмоциліндр 46 пересуває перший ролик 41 з положення намотування (фіг.1) у положення проводки (фіг.3) для виконання операції проводки (описано далі). Як це показано на фіг.14, шлях переміщення першого ролика 41 знаходиться під невеликим кутом до шляху переміщення другого ролика 42, що дозволяє першому ролику 41 проходити повз другий ролик 42, не торкаючись його. Другий рухаючий механізм 45, бажано, має стандартний пневмоциліндр 49, який пересуває несучий елемент 50, на якому встановлено другий ролик 42, і, таким чином, стрижні 51, закріплені на несучому елементі 50, ковзають крізь основу 52. Пневмоциліндр 49 пересуває другий ролик 42 між положенням, у якому цей ролик виконує операції проводки оптичного волокна у розподілювач 40 (фіг.3) і проводки та намотування волокна на першу котушку 70 (фіг.16В), і положенням, у якому другий ролик 42 виконує операції проводки і намотування оптичного волокна на другу котушку 70' (фіг.15В). Привідні пристрої 53, 54 (фіг.13, 14) надають першому та другому роликам 41, 42 швидкості, яка по суті дорівнює швидкості оптичного волокна під час проводки у перший і другий ролики 41, 42 і під час намотування волокна на першу та другу котушки 70, 70'. Як привідні пристрої 53, 54 бажано використовувати електромотори. Як показано на фіг.9, рухаючий механізм 58 пересуває розподілювач 40 по суті паралельно осям R1, R2 обертання першої та другої котушок 70, 70і у положення, у якому розподілювач 40 виконує операції проводки і розподілу оптичного волокна під час намотування. У бажаному втіленні механізм 58 включає ковзун (деталь No. 506201ET-LH-MP, Daedal Division of Parker Hannifin Corporation) з полицею 62, гайкою 59, встановленою знизу несучого елемента 60 розподілювача 40, і ведучий гвинт 63 гайки 59. Механізм 58 має також мотор 61, встановлений на полиці 62, який обертає ведучий гвинт 63 і примушує гайку 59 пересуватись уздовж гвинта 63, внаслідок чого несучий елемент 60 розподілювача 40 ковзає уздовж полиці 62. За високих швидкостей волокна, які досягають, наприклад, 30м/с, оптичне волокно зазнає пошкоджень, якщо буде ковзати по будь-якій поверхні, наприклад, боковій поверхні спрямовуючих канавок ролика. Якби третій ролик 23 натяжного пристрою 20 і перший ролик 41 розподілювача 40 не могли повертатися, пересування розподілювача 40 під час намотування у напрямку паралельно осям R1, R2 обертання, призвело б до взаємного зсуву або порушенню узгодження напрямків між третім роликом 23 і першим роликом 41. Ролики вважаються неузгодженими, якщо оптичне волокно входить у канавку щонайменше одного ролика під кутом відносно лінії, тангенціальної до верхньої частини канавки у точці початкового контакту волокна з канавкою. Таке неузгодження може призвести до проковзання оптичного волокна по сторонах канавок третього 23 і першого 41 роликів і, отже, пошкодження волокна. Згідно з цим третій ролик 23 і перший ролик 41 можуть повертатись, як це описано вище, і, крім того, пов'язані телескопічним зв'язком 65 для підтримання зумовленого взаємного положення. Телескопічний зв'язок 65 з'єднано з поворотним елементом 24 третього ролика 23 (фіг.12) і з поворотним елементом 43 першого ролика 41 (фіг.13). Як показано на фіг.9, телескопічний зв'язок 65 з'єднує ролики 23, 41, що повертаються, завдяки чому вони залишаються узгодженими під час пересування розподілювача 40. Якщо для роликів 23, 41 зберігається початкове узгодження напрямків руху оптичного волокна, волокно під час руху між роликами 23, 41 не буде ковзати по бокових поверхнях канавок цих роликів. Однак, повертання ролика 23 може призвести до його розузгодження з роликом 22, а повертання ролика 41 - до розузгодження з роликом 42, а це, у свою чергу, може призвести до ковзання волокна по бокових поверхнях канавок і його пошкодження під час руху між роликами 22, 23 і між роликами 41, 42. Винахід передбачає запобігання такому розузгодженню під час повороту. Зокрема, як це показано на фіг.1, 12, положення другого ролика 22 і третього ролика 23 узгоджують таким чином, щоб їх канавки лежали на першій лінії (вісь А1). При цьому канавка третього ролика 23 розташована безпосередньо на першій лінії, а канавку другого ролика 22 зсунуто від першої лінії приблизно на 3/8 дюйма (7,5мм) (цей зсув дозволяє другому ролику 22 вертикально пересуватися повз третій ролик 23, не контактуючи з ним). Згідно з винаходом це узгодження забезпечується поворотом третього ролика 23 на осі А1 таким чином, що канавка цього ролика під час повороту залишається на першій лінії. Подібним чином (фіг.1, 13), щоб уможливити поворот першого ролика 41 розподілювача 40 без пошкодження оптичного волокна, перший ролик 41 і другий ролик 42 розташовують таким чином, щоб їх канавки знаходились загалом на другій лінії (вісь А2), а перший ролик 41 повертався на осі А2. Перший та другий шпиндельні вузли 68, 68' під час проводки і намотування крутять першу та другу котушки 70, 70' відповідно. Перший та другий шпиндельні вузли в основному схожі, за винятком того, що вузол 68' обернутий відносно першого вузла 68. Отже далі буде описано тільки перший шпиндельний вузол 68. Перший шпиндельний вузол має у складі перший шпиндель (показаний частково), який підтримує першу котушку 70 і зчеплений з нею під час обертання. Приводом першого шпинделя є мотор 71 (фіг.19), який обертає першу котушку 70. Як показано на фіг. 18, перший шпиндель має фланець 72, що прилягає до першої котушки 70. На фланці 72 встановлено перший пристрій 73 проводки. У бажаному втіленні він являє собою затяжку. Корпус 74 охоплює усю першу котушку 70 і забезпечує безпеку оператора і захист від захльосту. Корпус 74 має намотувальну щілину 75, паралельну осі R1 обертання першої котушки 70. Оптичне волокно надходить від розподілювача 40 і, проходячи крізь щілину 75, намотується на першу котушку 70. Корпус 74 має також щілину 76.для проводки, яка лежить у площині, що перетинає вісь R1 першої котушки 70. Щілина 76 для проводки має затягуючу частину 76А, паралельну осі R1 першої котушки 70. Ця щілина використовується для проводки, яку буде описано далі. Компоненти для проводки Бажаний захоплюючий пристрій 80 має у складі аспіратор 82 (модель No. HS-18, ENKA-Tecnica) захоплює оптичне волокно, що надходить від постачального пристрою 11. Аспіратор 82 живиться стисненим повітрям, яке постачається з тиском від 0 до 180 фунтів на кв. дюйм (1242кПа) залежно від швидкості надходження оптичного волокна від постачального пристрою 11, і, всмоктуючи волокно, забезпечує натягування оптичного волокна між постачальним пристроєм 11 і аспіратором 82 з бажаною силою приблизно 40 г. Захоплюючий пристрій 80 має раму 84, яка підтримує аспіратор 82, з'єднаний з захоплювальним рукавом 82А. Фотоелектричний датчик 81 розташований у рукаві 82А на відстані приблизно 6 футів (1,8м) від входу до аспіратора 82, визначає, коли відбувається захоплення оптичного волокна. Аспіратор 82 знаходиться поблизу РМН12 постачального пристрою 11. Рухаючий механізм 83, бажано безстрижневий пневмоциліндр, пересуває аспіратор 82 відносно РМН12 у втягнуте і висунуте положення, показані на фіг.17А і 17Б відповідно. У висунутому до РМН12 положенні аспіратор 82 знаходиться поблизу очікуваного шляху оптичного волокна, коли воно з'являється з РМН12, і таким чином, у положенні, яке забезпечує автоматичне захоплення аспіратором 82 оптичного волокна у разі розриву. Ведучий елемент 85, бажано ролик, знаходиться у рамі 84 і розташований впритул до аспіратора 82. Поверхня цього елемента забезпечує рух оптичного волокна між аспіратором 82 і позиціонуючим пристроєм 90 таким чином, що оптичне волокно входить у аспіратор 82, не ковзаючи по нерухомій поверхні. Рухаючий механізм 86, бажано пневмоциліндр, пересуває ролик 85 у втягнуте і висунуте положення (фіг.17А, 17В відповідно) відносно аспіратора 82. Привід 87, бажано електромотор, обертає ролик 85 з швидкістю, що відповідає швидкості оптичного волокна. Позиціонуючий пристрій 90 захоплює оптичне волокно, що рухається між постачальним пристроєм 11 і аспіратором 82 і веде його до різних положень для проводки. Позиціонуючий пристрій 90 має провідну консоль 91 з переймаючим елементом 92 на ній. Переймаючий елемент 92 здатен перехоплювати оптичне волокно, щоб вести його, не заважаючи безперервному захопленню волокна аспіратором 82. Цей елемент має у складі первинний холостий ролик 93 і два вторинних холостих ролики 94, 94', розташовані, в основному, перпендикулярно до ролика 93 (фіг.10). Ролик 93 переймає і веде оптичне волокно, коли його пересувають назад до першої та другої котушок 70, 70', а ролику 94, 94' переймають і ведуть волокно під час його проведення на першу і другу котушки 70, 70' відповідно, як це описано далі. Рухаючий механізм 95 рухає провідну консоль 91 і, отже, переймаючий елемент 92, у першому напрямку до першої і другої котушок 70, 70' і у другому напрямку, поперечному до першого згідно з фіг.4. Механізм 95 має повздовжню спрямовуючу рейку 96 і поперечну рейку 97. Поперечна рейка 97 може рухатися вздовж повздовжньої рейки 96 у першому напрямку за допомогою ременя, закріпленого до поперечної рейки 97, який огинає холостий ролик і ролик, що приводиться мотором, і розташований на протилежному кінці повздовжньої рейки 96 (не показаний). Провідна консоль 91 пересувається уздовж поперечної рейки 97 у другому напрямку за ременем, закріпленим до консолі 91, який огинає холостий ролик і ролик, що приводиться мотором, і розташований на протилежному кінці повздовжньої рейки 97 (не показаний). Перший та другий волокноспрямовуючі пристрої 100, 100' спрямовують волокно у положення для проведення на першу та другу котушки 70, 70' відповідно. Пристрої 100, 100' подібні, за винятком того, що другий пристрій 100' обернений відносно першого пристрою 100. Тому далі буде детально описано тільки перший з них. Як показано на фіг.11, бажаний волокноспрямовуючий пристрій 100 має у складі ролик 101, поворотно встановлений на підтримуючому елементі 102, який рухомо встановлено на основі 103. Привід 107, бажано електромотор, обертає ролик 101 з швидкістю, що відповідає швидкості оптичного волокна. Рухаючий механізм 104 містить пневмоциліндр 105, який пересуває ролик 101, в основному, паралельно осі R1 обертання першої котушки 70. Пневмоциліндр 105 пересуває ролик 101 у втягнуте і висунуте положення (фіг.6, 8 відповідно). Механізм 104 також пересуває ролик 101 уздовж суттєво дугоподібного шляху у площині, поперечній до осі обертання R1 першої котушки 70. Цей механізм має у складі суттєво дугоподібну рейку 106, уздовж якої основа 103 пересувається ременем, що скріплений з нею і огинає холостий ролик і ролик з моторним приводом, розташований на протилежному кінці рейки 106 (не показаний). Як це буде пояснено далі у зв'язку з операцією проводки, пересуваючись уздовж цієї дуги, ролик 101 переймає у положенні проведення оптичне волокно і переміщує його до осі обертання R1 для проведення на першу котушку 70. Операції проводки Одна з операцій проводки передбачає проводку оптичного волокна, захопленого аспіратором 82, у намотувальний апарат 10. Аспіратор 82 захоплює оптичне волокно у щонайменше двох випадках, а саме, на початку волочіння і тоді, коли оптичне волокно рветься під час волочіння. На початку волочіння оператор за допомогою порівняно невеликого пилососа підхоплює оптичне волокно, що з'являється з РМН12. Коли швидкість, з якою волокно виходить з РМН12, перевищить 7 м/с, у дію вступає аспіратор 82 (до нього починає надходити стиснене повітря), і оператор розриває оптичне волокно і майже одночасно вставляє його у аспіратор 82, який починає захоплювати волокно. Якщо під час волочіння оптичне волокно розірветься, другий ролик 22 натяжного пристрою 20 впаде у нижнє положення його руху у пристрої 20, завдяки чому розрив буде автоматично виявлений. Аспіратор 82 автоматично активується і пневмоциліндр 83 пересуває його до РМН12 постачального пристрою 11 (фіг.17Б), і аспіратор 82 починає захоплювати оптичне волокно. У обох випадках після захоплення оптичного волокна аспіратором 82 операція проводки продовжується автоматично, як це описано далі. Коли датчик 81 у захоплювальному рукаві 82А виявляє захоплення оптичного волокна, розподілювач 40 переходить у перше положення для проводки, показане на фіг.2, а пневмоциліндри 26, 46 переміщують другий ролик 22 натяжного пристрою 20 і перший ролик 41 розподілювача 40 у їх відповідні положення для проводки, показані на фіг.3.Мотори 27, 28, 29, 53, 54 починають обертати ролики 21, 22, 23, 41, 42 з швидкістю, що відповідає швидкості волокна (яке визначається швидкістю РМН12). Один з шпинделів 68, 68' також починає обертати відповідну котушку 70 або 70' з швидкістю, що на 0,2м/с перевищує швидкість подачі волокна постачальним пристроєм 11. Після цього пневмоциліндр 83 відводить аспіратор 82 від РМН 12 у втягнуте положення, показане на фіг17В. Одночасно рухаючий механізм 95 пересуває переймаючий елемент 92 позиціонуючого пристрою 90 усередину, з положення, показаного на фіг.17Б, у положення, показане на фіг.17В. Внаслідок цього ролик 93 переймає оптичне волокно, що рухається між РМН 2 і аспіратором 82 (фіг.17В). Оптичне волокно проходить між роликами 94, 94', але не захоплюється ними. Пневмоциліндр 86 пересуває у висунуте положення (фіг.17В) ролик 85, який обертається мотором 87 з швидкістю руху волокна, і цей ролик переймає і спрямовує оптичне волокно, що рухається між роликом 93 і аспіратором 82. Згідно з фіг.4, рухаючий механізм 95 пересуває переймаючий елемент 92 з положення А, у якому він переймає оптичне волокно, у назовнішнє положення В, пересуваючи його спочатку у першому напрямку до першої та другої котушок 70, 70', а потім у другому напрямку, поперечному до першого. Після досягнення положення В переймаючий елемент 92 може продовжувати рух у першому напрямку, не торкаючись шпиндельних вузлів 68, 68'. Після проходження повз шпиндельні вузли 68, 68' переймаючий елемент 92 пересувається у напрямку, протилежному другому, і досягає положення В (перше положення елемента 92), переводячи цим у перше положення для проводки оптичне волокно, яке продовжує надходити від постачального пристрою 11, спрямовуватись роликами 93, 85 і захоплюватись аспіратором 82. Оптичне волокно у першому положенні для проводки знаходиться по суті на однаковій відстані від першої та другої котушок 70, 70' (фіг.3) навпроти середин котушок (фіг.4) і проходить по суті перпендикулярно до лінії, що проходить між осями R1, R2 котушок. Згідно з фіг.3 оптичне волокно у першому положенні для проводки проходить між другим роликом 22, який займає своє положення для проводки, і першим та третім роликами 21, 23 натяжного пристрою 20. Оптичне волокно проходить також між першим роликом 41, що займає своє положення для проводки, і другим роликом 42 розподілювача 40. Після цього пневмоциліндр 26 дозволяє другому ролику 22 натяжного пристрою 20 впасти у положення для намотування (фіг.5), що примушує цей ролик перейняти оптичне волокно, протягнути його униз, до першого і третього роликів 21, 23 і провести у натяжний пристрій20. Крім того, пневмоциліндр 46 переміщує перший ролик 41 розподілювача 40 униз, у його положення для намотування (фіг.5), що примушує цей ролик перейняти оптичне волокно, протягнути його униз, до другого ролика 42, і провести у розподілювач 40. Після цього переймаючий елемент 92 і розподілювач 40 переміщуються з відповідних перших позицій (фіг.4) у другі (фіг.6), внаслідок чого оптичне волокно займає друге положення для проводки на одну з котушок 70, 70'. Котушка, на яку проводять оптичне волокно, визначається в залежності від обставин. Наприклад, якщо розрив оптичного волокна стався під час намотування на першу котушку 70, волокно буде проведено на другу котушку 70', а частково заповнену першу котушку 70 буде знято. Оскільки операція проводки та ж сама для обох котушок 70, 70і, її буде описано тільки для першої котушки 70. Після досягнення оптичним волокном другого положення для проводки рухаючий механізм 104 починає переміщення першого волокноспрямовуючого пристрою 100 вгору вздовж дугоподібної рейки 106 у напрямку, показаному на фіг.5. Під час цього переміщення мотор 107 починає обертати ролик 101 з швидкістю руху волокна, причому ролик 101 утримується у утягнутому положенні пневмоциліндром 105 і тому не може перейняти волокно. Після досягнення роликом 101 положення, показаного на фіг.6, пневмоциліндр 105 пересуває цей ролик паралельно осі R1 обертання першої котушки 70 у висунуте положення (фіг.8), у якому ролик 101 може перейняти оптичне волокно. Отже ролик 101 знаходиться збоку від оптичного волокна на відстані від першої котушки 70 (фіг.5). Рухаючий механізм 104 переміщує ролик 101, що обертається, назад уздовж дугоподібної рейки 106 (фіг.7), щоб цей ролик перейняв оптичне волокно у другій позиції для проводки і протяг його униз до осі R1 обертання першої котушки 70. Коли ролик 101 протягує оптичне волокно униз, воно зсковзує з ролика 93 переймаючого елемента 92 на ролик 94. Продовжуючи свій рух уздовж дугоподібної рейки 106, ролик 101 спрямовує оптичне волокно у щілину 76 для проводки (фіг.19) доки воно не займе положення тангенціально до тіла першої котушки 70 і частково обгорне його (фіг.7). Після цього пневмоциліндр 105 (фіг.19) пересуває ролик 101 по суті паралельно до осі R1 обертання першої котушки 70, надаючи ролику втягнутого положення. Цей рух тягне волокно до затягуючої частини 76А щілини 76 поблизу фланця 72 шпинделя, що обертається, і це дозволяє пристрою 73 проводки (фіг.18) одночасно захопити оптичне волокно і лезом перерізати його. Захоплена частина волокна проводиться на тіло першої котушки 70, яка обертається з швидкістю, що на 0,2м/с перевищує швидкість волокна. Це перевищення швидкості під час проведення оптичного волокна на першу котушку 70 примушує ролик 22 натяжного пристрою 20 (фіг.1) піднятися у контрольовану зону. Швидкість, з якою волокно тягнеться першою котушкою 70 визначається швидкістю обертання тіла цієї котушки, а не швидкістю пристрою 73 проводки, який знаходиться назовні від тіла котушки 70 і тому обертається швидше. Таким чином, операція проводки на першу котушку 70 відбувається без шкідливого смикання оптичного волокна. Відрізана, або вільна частина оптичного волокна всмоктується у аспіратор 82 і намотування продовжується автоматично. Інша операція проводки передбачає захоплення оптичного волокна, що намотується на одну котушку, і переведення його на другу· Це може бути бажано, коли котушка вже має бажану кількість волокна, наприклад, вже заповнена. Намотувальний апарат 10 може визначити кількість оптичного волокна на котушці, підраховуючи оберти РМН12. Коли кількість оптичного волокна на другій котушці 70' досягає бажаного рівня, рухаючий механізм 58, пересуваючи розподілювач 40 паралельно осі R2 обертання другої котушки 70', переміщує його у положення, наведене на фіг.8, в той час, як котушка 70' продовжує намотувати волокно. Після цього пневмоциліндр 49 переміщує другий ролик 42 розподілювача 40 з положення для проводки/намотування на другу котушку 70' (фіг.16А) у положення для проводки/намотування на першу котушку 70 (фіг.16Б), після чого оптичне волокно опиняється у положенні передачі до першої котушки. У цьому положенні оптичне волокно може бути перейняте роликом 101 першого волокноспрямовуючого пристрою 100. Після переведення оптичного волокна у положення передачі до першої котушки рухаючий механізм 104 починає пересувати перший волокноспрямовуючий пристрій 100 угору вздовж дугоподібної рейки 106. Під час цього пересування мотор 107 (фіг.11) починає обертати ролик 101 з швидкістю, що дорівнює швидкості оптичного волокна, причому ролик 101 утримується пневмоциліндром 105 у втягнутому положенні і тому не може перейняти волокно. Коли ролик 101 досягає положення, показаного на фіг.16Б, пневмоциліндр, пересуває ролик 101 паралельно осі R1 обертання першої котушки 70 у висунуте положення, у якому цей ролик може перейняти оптичне волокно. Таким чином, ролик 101 опиняється збоку від оптичного волокна на віддалі від першої котушки 70. Рухаючий механізм 104 переміщує ролик 101, що обертається, назад уздовж дугоподібної рейки 106, щоб перейняти оптичне волокно у положенні передачі до першої котушки і протягнути його униз до осі R1 обертання першої котушки 70 (фіг.16В). Пересуваючись уздовж дугоподібної рейки 106, ролик спрямовує оптичне волокно у щілину 76 для проводки (фіг.19). На фіг. 19 також показано, що пневмоциліндр 105 після цього пересуває ролик 101 по суті паралельно осі R1 обертання першої котушки 70 до його втягнутого положення. Це пересування заводить оптичне волокно у затягуючу частину 76А щілини 76 для проводки поблизу фланця 72 обертаючого шпинделя, внаслідок чого пристрій 73 проводки (фіг.18) захоплює і перерізує оптичне волокно. Відрізана частина волокна намотується на другу котушку 70', захоплена частина проходить на котушку 70, і намотування продовжується автоматично. Подібним чином, коли оптичне волокно у бажаній кількості намотане на першу котушку 70, рухаючий механізм 58, пересуваючи розподілювач 40 паралельно осі R1 обертання першої котушки 70, переміщує його у положення, наведене на фіг.6, в той час, як котушка 70 продовжує намотувати волокно. Після цього пневмоциліндр 49 переміщує другий ролик 42 розподілювача 40 з положення для проводки/намотування на першу котушку 70 (фіг.15А) у положення для проводки/намотування на другу котушку 70' (фіг.15Б), після чого оптичне волокно опиняється у положенні передачі до другої котушки. У цьому положенні оптичне волокно може бути перейняте роликом 101і, поворотно встановленим на підтримуючому елементі 102' другого волокноспря-мовуючого пристрою 100', коли цей ролик пересувається механізмом 104'. Хоча другий волокноспрямовуючий пристрій 100' є оберненим відносно першого такого пристрою 100, він працює подібним чином і проводить оптичне волокно, що знаходиться у другому положенні передачі, до другої котушки 70' (фіг.15Б, 15В). На фіг.20 зображено систему керування намотувального апарата 10, яка керує вищезгаданими операціями проводки/намотування. У своєму складі ця система має програмований контролер 120, який керує послідовністю дій, опитує усі датчики 121 (наприклад, датчики 25, 81), керує усіма пневмоциліндрами 122 (наприклад, пневмо-циліндрами 26, 46, 49) і підтримує зв'язок з комп'ютером 124, що керує рухом. Цей комп'ютер виконує нагляд і керування рухаючим механізмом 95 позиціонуючого пристрою 90, рухаючими механізмами 104, 104' першого та другого волокноспрямовуючих пристроїв 100, 100', живленням 125 волочильного обладнання, РМН12, рухаючим механізмом 58 розподілювача і першим та другим шпиндельними вузлами 68, 68і. Для спеціаліста зрозуміло, що спосіб і пристрій згідно з винаходом можна модифікувати, залишаючись у межах винаходу. Наприклад, хоча описане втілення призначене для роботи з оптичним волокном, певні особливості винаходу дозволяють використати його для волокон з інших матеріалів. Керуючись описом і практикою застосування винаходу, спеціаліст може створити інші його втілення. Наведені характеристики і приклади слід розглядати як ілюстрації, в той час, як дійсні ознаки винаходу наведено у Формулі винаходу.
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B65H 54/02
Мітки: спосіб, заправку, розірваного, намотування, спрямовування, волокна, котушку
Код посилання
<a href="https://ua.patents.su/18-46789-sposib-spryamovuvannya-na-zapravku-rozirvanogo-volokna-dlya-namotuvannya-na-kotushku.html" target="_blank" rel="follow" title="База патентів України">Спосіб спрямовування на заправку розірваного волокна для намотування на котушку</a>
Спосіб порядного укладання порошкового дроту на котушку намотувального пристрою
Номер патенту: 35961
Опубліковано: 16.04.2001
Автори: Кочевенко Іван Іванович, Литвинов Віктор Іванович, Бордюгов Вячеслав Миколаєвич, Підгорний Ігор Вікторович, Горовий Олександр Борисович, Тітієвський Володимир Маркович
МПК: B21C 47/02
Мітки: порядного, котушку, спосіб, намотувального, пристрою, порошкового, укладання, дроту
Формула / Реферат:
Спосіб порядного укладення порошкового дроту на котушку намотувального пристрою, що включає в себе супроводження виткоукладальником порошкового дроту від однієї щоки котушки до другої зі швидкістю V = d * f, зупинку і реверс виткоукладальника, який відрізняється тим, що перед намоткою кожної бухти вимірюють діаметр дроту, а супроводження дроту зі швидкістю V проводять протягом укладання в кожному ряді N+0,5 витка і з V=Q...
Спосіб контролю положення волокна та пристрій для вимірювання відстані до поверхні волокна
Номер патенту: 32584
Опубліковано: 15.02.2001
Автори: Пастел Дейвід Ендрю, Етвуд Томас Джозеф, Редінг Брюс Воррен
МПК: G01B 9/00, G01B 11/00
Мітки: спосіб, положення, поверхні, відстані, контролю, пристрій, волокна, вимірювання
Текст:
...относится к способам и к устройству для измерения расстояния до объекта или части его поверхности В европейском патенте 608 538, являющимся прототипом предлагаемого изобретения, раскрыто использование спектра пространственных частот (при контроле - прим перев) волокна В этой патентной публикации решается проблема контроля толщины герметичных, например, углеродных покрытий, наносимых на волокна в процессе вытяжки для снижения воздействия...
Спосіб приготування короткого волокна льону та конопель
Номер патенту: 30881
Опубліковано: 15.12.2000
Автор: Антонов Станіслав Іванович
МПК: D01D 1/00
Мітки: льону, короткого, конопель, волокна, спосіб, приготування
Формула / Реферат:
Спосіб приготування короткого волокна льону та конопель шляхом трясіння, шаростоншення, м'яття та тіпання, який відрізняється тим, що волокно піддають додатковому тіпанню з пневматичним сепаруванням потоку на очищені волокна та суміш, що складається з неочищених волокон і смітних домішок, яку піддають додатковому очищенню та направляють на рециркуляцію.
Спосіб одержання базальтового волокна
Номер патенту: 13496
Опубліковано: 19.07.1999
Автори: Кібол Віктор Федорович, Кібол Роман Вікторович, Кібол Ірина Вікторівна
МПК: C03B 37/00
Мітки: спосіб, базальтового, волокна, одержання
Формула / Реферат:
Способ получения базальтового волокна путем подачи базальтовой породы, нагрева ее до температуры плавления, гомогенизации расплава и вытягивания непрерывных волокон, отличающийся тем, что в качестве базальтовой породы берут андезитобазальт, а нагрев породы ведут до температуры 1605 - 1700°C, при этом волокно вытягивают со скоростью 4505 - 5500м/мин из расплава вязкостью 501 - 2100ПЗ.
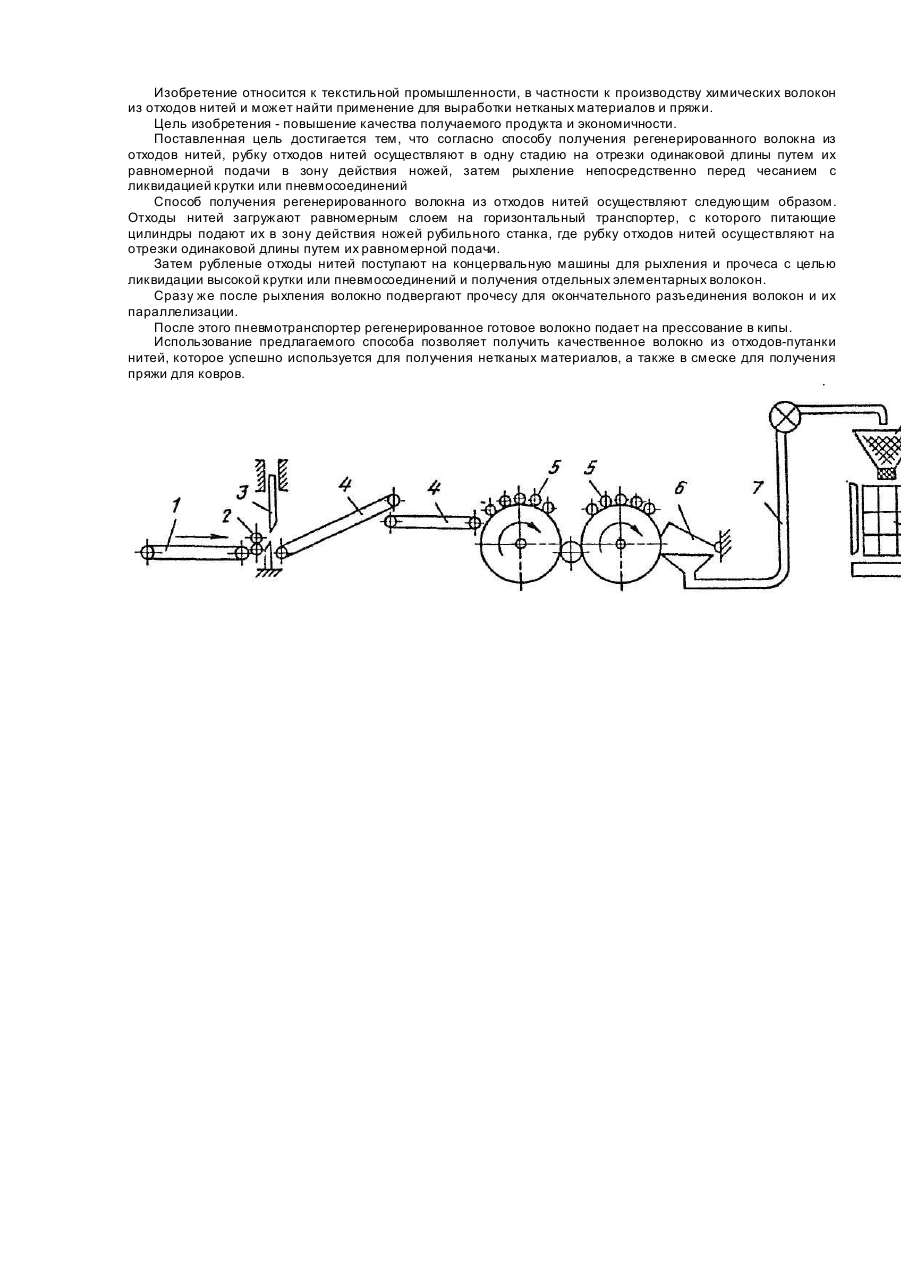
Спосіб одержання регенерованого волокна з відходів ниток
Номер патенту: 19687
Опубліковано: 25.12.1997
Автори: Тихоміров Всеволод Дмитрович, Спектор Меєр Мануілович, Мальчевський Анатолій Іванович, Гужва Микола Сергійович, Ткачук Ананій Іполітович, Зозовський Аркадій Ілліч, Міхлін Борис Лазаревич, Потелло Анатолій Васильович
МПК: D01G 11/00
Мітки: відходів, спосіб, ниток, регенерованого, одержання, волокна
Формула / Реферат:
Способ получения регенерированного волокна из отходов нитей, включающий рубку отходов с помощью ножей, рыхление, чесание и прессование волокна, отличающийся тем, что рыхление проводят в одну стадию непосредственно перед чесанием, а рубку отходов волокна осуществляют на отрезки одинаковой длины путем их равномерной подачи в зону действия ножей.
Попередній патент: Спосіб одержання модифікованої катіонообмінної мембрани
Випадковий патент: Спосіб підвищення ефективності ураження повітряних цілей зенітним ракетним комплексом